
Node Depth Adjustment Based Target Tracking in Sparse Underwater Sensor Networks

Abstract
:1. Introduction
- Considering the transmission delay and sound velocity profile theory, the particle filter algorithm under time delay estimation is improved;
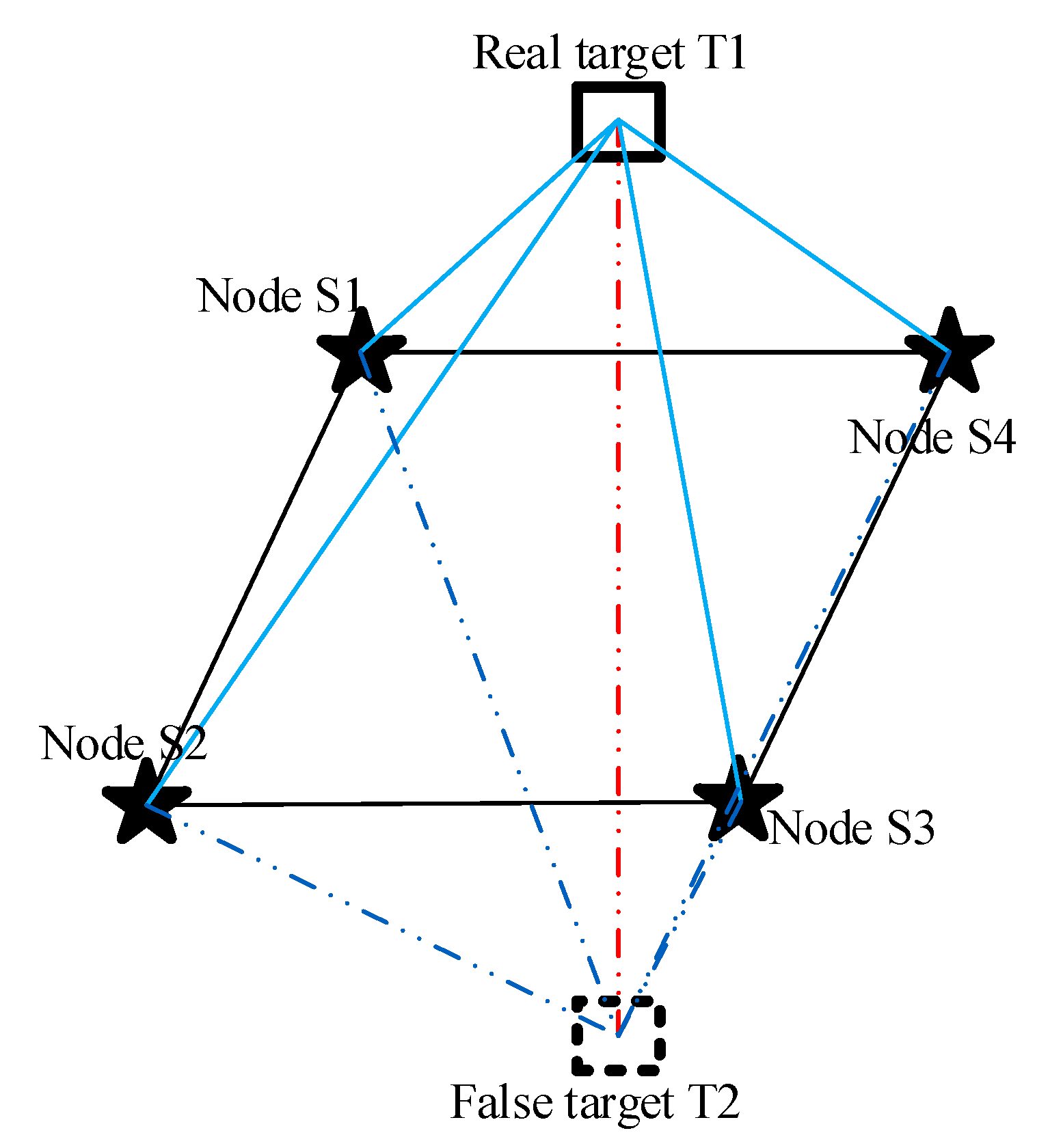
- The problem of depth adjustment is constructed. Based on the relationship between FIM and node depth, the problem above is converted into an optimization problem. To avoid the impact of the four-point coplanar topology on tracking and positioning, the node topology constraint is also designed;
- A node depth adjustment algorithm using convex optimization is proposed, different solution strategies are designed for cases in which the target depth is known or unknown, and the node depth adjustment is realized.
2. System Model
2.1. Target State Model
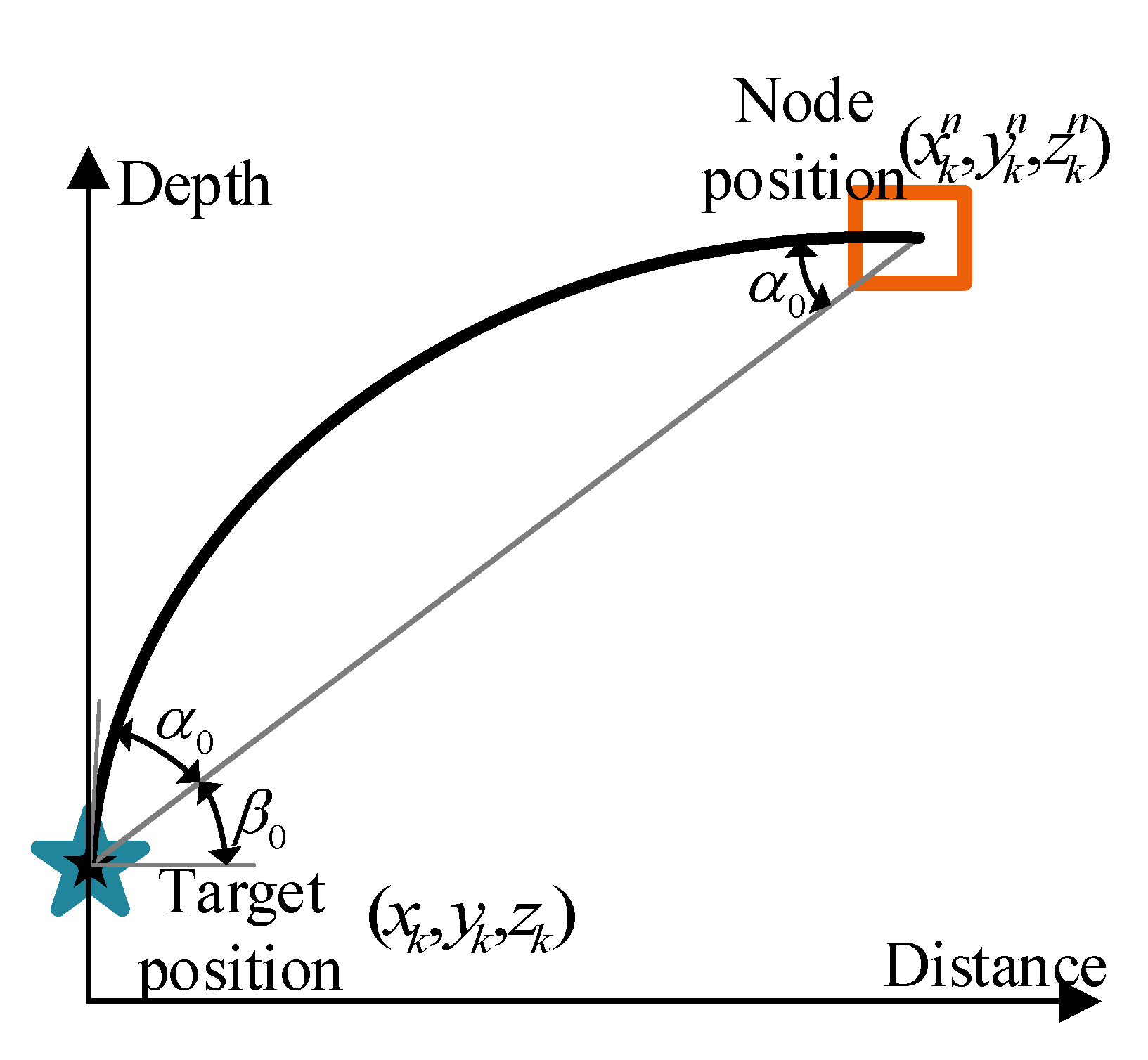
2.2. Measurement Model
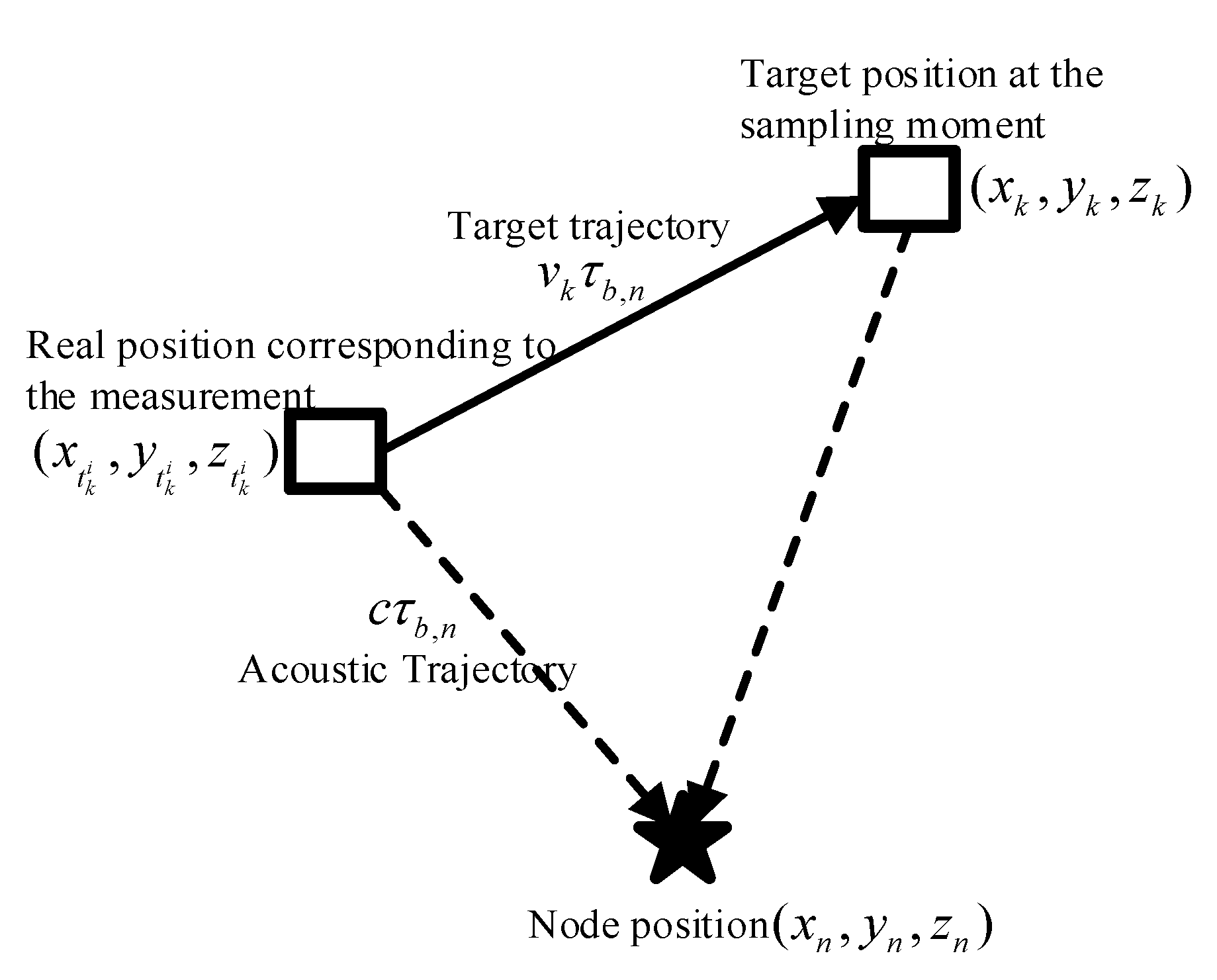
2.3. Improved Particle Filter under Time Delay Estimation
| Algorithm 1. Improved particle filter under time delay estimation. |
| Obtain the sampled particles based on the prior state 1. for do 2. Calculate the transmission delay by (4); 3. Calculate the real state corresponding to the measurement by (5); 4. Calculate the likelihood function; 5. end for 6. Update importance weights by (10) 7. Normalize the weight using 8. Estimate out the target state 9. Resampling |
3. Problem Formulation
3.1. Relationship between FIM and Node Depth
3.2. Node Depth Adjustment Problem
4. Depth Adjustment Algorithm
4.1. Depth Adjustment Algorithm When the Target Depth Is Known
- Case 1:
- Case 2:
| Algorithm 2. Node depth adjustment algorithm when the target depth is known. |
| 1. Calculate ; 2. if 3. minimize the height difference between the node and the target 4. elseif 5. if 6. minimize the height difference between the node and the target 7. elseif 8. maximize the height difference between the node and the target 9. endif 10. endif |
4.2. Depth Adjustment Algorithm When the Target Depth Is Unknown
| Algorithm 3. Logarithmic barrier function—Outer Iterations. |
| Determine the starting point and set , error threshold . Repeat 1. Obtain the optimal solution 2. Update the optimal solution 3. if , then exit 4. |
| Algorithm 4. Gradient descent method—Inner Iterations. |
| Get the feasible starting point from Algorithm 3 and set error threshold , the maximum number of iterations Repeat until 1. Calculate the gradient 2. If , then exit and output 3. Choose Step size by backtracking line search 4. Update 5. |
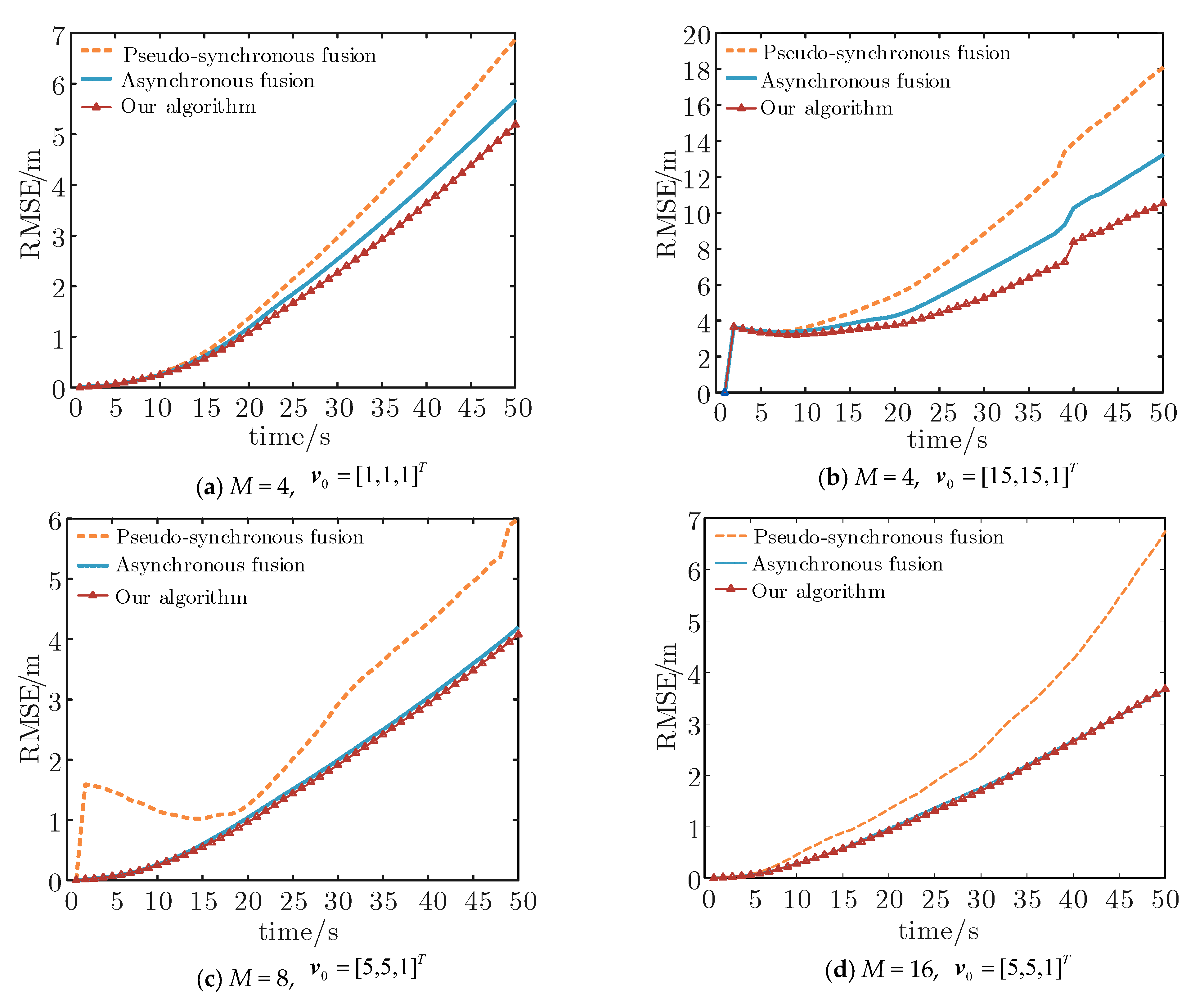
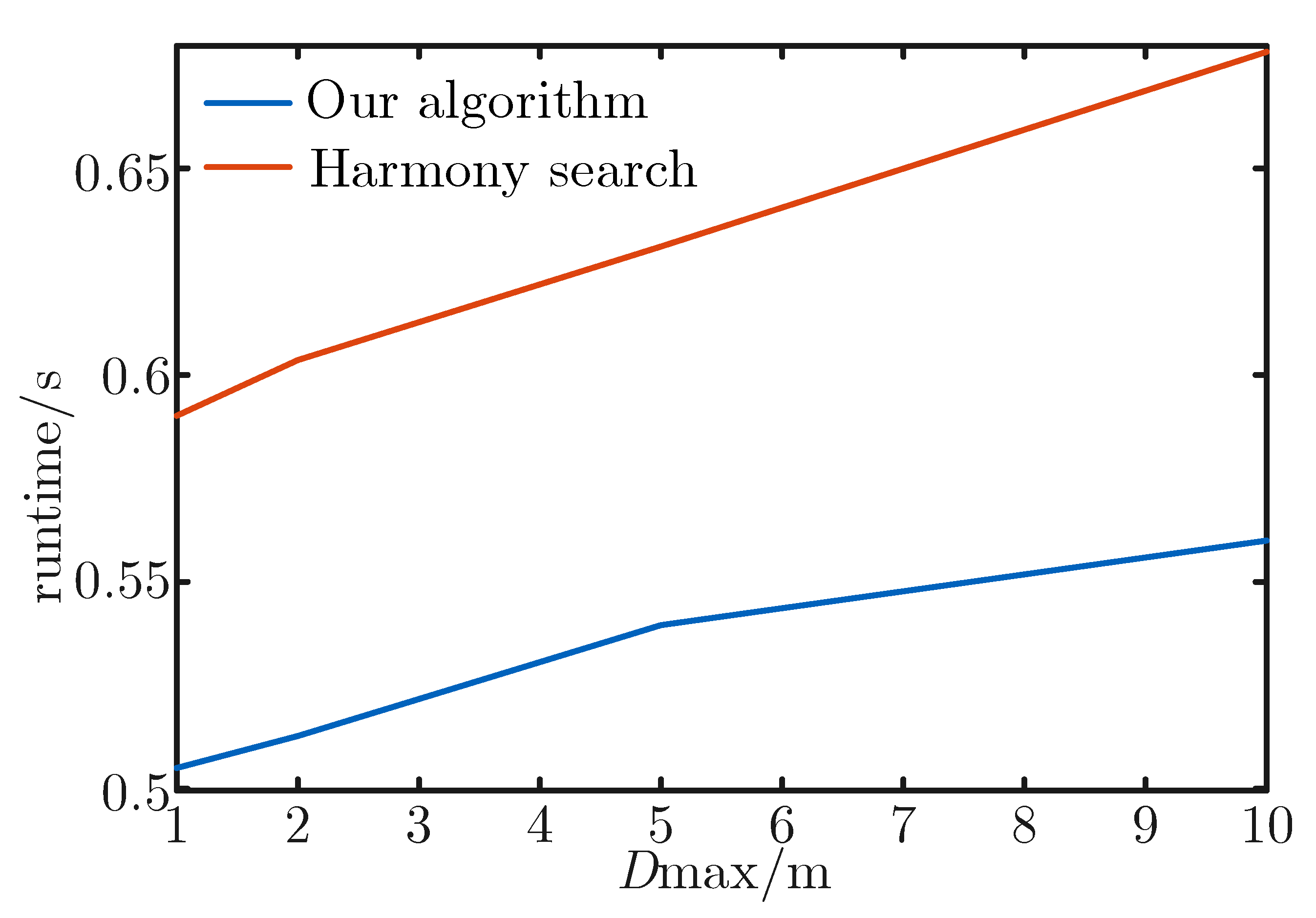
5. Simulation and Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Luo, J.; Han, Y.; Fan, L. Underwater acoustic target tracking: A review. Sensors 2018, 18, 112. [Google Scholar] [CrossRef] [PubMed]
- Ghafoor, H.; Noh, Y. An overview of next-generation underwater target detection and tracking: An integrated underwater architecture. IEEE Access 2019, 7, 98841–98853. [Google Scholar] [CrossRef]
- Su, X.; Ullah, I.; Liu, X.; Choi, D. A review of underwater localization techniques, algorithms, and challenges. J. Sens. 2020, 2020, 6403161. [Google Scholar] [CrossRef]
- Liu, M.; Han, X.; Zhang, S.; Zheng, R.; Lan, J. Research status and prospect of target tracking technologies via underwater sensor networks. Acta Autom. Sin. 2021, 47, 235–251. [Google Scholar] [CrossRef]
- Zhang, Y.; Gao, L. Target Tracking with Underwater Sensor Networks Based on Grubbs Criterion and Improved Particle Filter Algorithm. J. Electron. Inf. Technol. 2019, 41, 2294–2301. [Google Scholar] [CrossRef]
- Ullah, I.; Chen, J.; Su, X.; Esposito, C.; Choi, C. Localization and detection of targets in underwater wireless sensor using distance and angle based algorithms. IEEE Access 2019, 7, 45693–45704. [Google Scholar] [CrossRef]
- Wang, W.; Li, X.; Zhang, K.; Shi, J.; Shi, W.; Ali, W. Robust Direction Finding via Acoustic Vector Sensor Array with Axial Deviation under Non-Uniform Noise. J. Mar. Sci. Eng. 2022, 10, 1196. [Google Scholar] [CrossRef]
- Hwang, J.; Bose, N.; Nguyen, H.D.; Williams, G. Acoustic search and detection of oil plumes using an autonomous underwater vehicle. J. Mar. Sci. Eng. 2020, 8, 618. [Google Scholar] [CrossRef]
- Liu, H.; Xu, B.; Liu, B. A Tracking Algorithm for Sparse and Dynamic Underwater Sensor Networks. J. Mar. Sci. Eng. 2022, 10, 337. [Google Scholar] [CrossRef]
- Yan, J.; Zhao, H.; Pu, B.; Luo, X.; Chen, C.; Guan, X. Energy-efficient target tracking with UASNs: A consensus-based Bayesian approach. IEEE Trans. Autom. Sci. Eng. 2019, 17, 1361–1375. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, M.-Q.; Zhang, S.-L.; Fan, Z.; Zhang, Q.-F. Mutual-information based weighted fusion for target tracking in underwater wireless sensor networks. Front. Inf. Technol. Electron. Eng. 2018, 19, 544–556. [Google Scholar] [CrossRef]
- Tian, S.; Zhang, Z. A Node Selection Algorithm Based on Multi-objective Optimization under Position Floating. IEEE Access 2022, 10, 1. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, H.; Liu, M.; Zhang, Q. Optimal quantization scheme for data-efficient target tracking via UWSNs using quantized measurements. Sensors 2017, 17, 2565. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, M.; Zhang, S. Node topology effect on target tracking based on UWSNs using quantized measurements. IEEE Trans. Cybern. 2014, 45, 2323–2335. [Google Scholar] [CrossRef]
- Xu, S.; Doğançay, K. Optimal sensor placement for 3-D angle-of-arrival target localization. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 1196–1211. [Google Scholar] [CrossRef]
- Song, Y. Underwater acoustic sensor networks with cost efficiency for internet of underwater things. IEEE Trans. Ind. Electron. 2020, 68, 1707–1716. [Google Scholar] [CrossRef]
- Li, B.; Chen, C. Fish-action hunt policy for underwater sensor deployment. J. Nanjing Univ. Sci. Technol. 2019, 43, 244–249. [Google Scholar] [CrossRef]
- Latif, K.; Javaid, N.; Ullah, I.; Kaleem, Z.; Abbas Malik, Z.; Nguyen, L.D. DIEER: Delay-intolerant energy-efficient routing with sink mobility in underwater wireless sensor networks. Sensors 2020, 20, 3467. [Google Scholar] [CrossRef]
- Banaeizadeh, F.; Toroghi Haghighat, A. An energy-efficient data gathering scheme in underwater wireless sensor networks using a mobile sink. Int. J. Inf. Technol. 2020, 12, 513–522. [Google Scholar] [CrossRef]
- Jiang, P.; Liu, S.; Liu, J.; Wu, F.; Zhang, L. A depth-adjustment deployment algorithm based on two-dimensional convex hull and spanning tree for underwater wireless sensor networks. Sensors 2016, 16, 1087. [Google Scholar] [CrossRef]
- Yang, Z.; Shi, X.; Chen, J. Optimal coordination of mobile sensors for target tracking under additive and multiplicative noises. IEEE Trans. Ind. Electron. 2013, 61, 3459–3468. [Google Scholar] [CrossRef]
- Tian, S.; Zhang, Z. Tracking Energy Control Algorithm Based on Underwater Sensor Networks Assisted by AUV. In Proceedings of the International Conference on Autonomous Unmanned Systems, Changsha, China, 24–26 September 2021; Springer: Singapore, 2021; pp. 379–388. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, D.; Zhang, S.; Zhang, Q. Node depth adjustment based target tracking in UWSNs using improved harmony search. Sensors 2017, 17, 2807. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Han, Y. A node depth adjustment method with computation-efficiency based on performance bound for range-only target tracking in UWSNs. Signal Process. 2019, 158, 79–90. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, Z.; Hao, B.; Shi, J. Sensor selection for TDOA-based localization in wireless sensor networks with non-line-of-sight condition. IEEE Trans. Veh. Technol. 2019, 68, 9935–9950. [Google Scholar] [CrossRef]
- Yan, Q.; Chen, J. Sensor Selection Method Based on Multi-objective Optimal Optimization for Mixture Gaussian Noise. J. Electron. Inf. Technol. 2021, 43, 341–348. [Google Scholar] [CrossRef]
- Liu, B.; Tangy, X.; Tharmarasa, R.; Kirubarajan, T.; Jassemi, R.; Halle, S. Underwater target tracking in uncertain multipath ocean environments. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4899–4915. [Google Scholar] [CrossRef]
- Bass, A.H.; Clark, C.W. The Physical Acoustics of Underwater Sound Communication. In Acoustic Communication; Springer: New York, NY, USA, 2003; pp. 15–64. [Google Scholar]
- Zhu, G.; Zhou, F.; Xie, L.; Jiang, R.; Chen, Y. Sequential asynchronous filters for target tracking in wireless sensor networks. IEEE Sens. J. 2014, 14, 3174–3182. [Google Scholar] [CrossRef]
- Liu, M.; Zhao, L.; Zhang, S. Delay-estimation-based asynchronous particle filtering for passive target tracking in underwater wireless sensor networks. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 8929–8934. [Google Scholar] [CrossRef]
- Brekhovskikh, L.M.; Lysanov, Y.P.; Lysanov, J.P. Fundamentals of Ocean Acoustics; Springer Science & Business Media: Berlin, Germany, 2003. [Google Scholar]
- Zhao, H.; Yan, J.; Luo, X.; Guan, X. Ubiquitous Tracking for Autonomous Underwater Vehicle with IoUT: A Rigid-Graph-Based Solution. IEEE Internet Things J. 2021, 8, 14094–14109. [Google Scholar] [CrossRef]
- Isbitiren, G.; Akan, O.B. Three-dimensional underwater target tracking with acoustic sensor networks. IEEE Trans. Veh. Technol. 2011, 60, 3897–3906. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, C.; Zhang, Y.; Ji, P. Energy-efficient adaptive dynamic sensor scheduling for target monitoring in wireless sensor networks. ETRI J. 2011, 33, 857–863. [Google Scholar] [CrossRef]
- Pozna, C.; Precup, R.-E.; Horvath, E.; Petriu, E.M. Hybrid Particle Filter–Particle Swarm Optimization Algorithm and Application to Fuzzy Controlled Servo Systems. IEEE Trans. Fuzzy Syst. 2022, 30, 4286–4297. [Google Scholar] [CrossRef]
- Greco, C.; Vasile, M. Robust Bayesian particle filter for space object tracking under severe uncertainty. J. Guid. Control. Dyn. 2022, 45, 481–498. [Google Scholar] [CrossRef]
- Cao, N.; Choi, S.; Masazade, E.; Varshney, P.K. Sensor selection for target tracking in wireless sensor networks with uncertainty. IEEE Trans. Signal Process. 2016, 64, 5191–5204. [Google Scholar] [CrossRef]
- Masazade, E.; Niu, R.; Varshney, P.K. Dynamic bit allocation for object tracking in wireless sensor networks. IEEE Trans. Signal Process. 2012, 60, 5048–5063. [Google Scholar] [CrossRef]
- Sun, J.; Shi, G. Cost-efficient node deployment for intrusion detection in underwater sensor networks. In Proceedings of the 2019 IEEE 25th International Conference on Parallel and Distributed Systems (ICPADS), Tianjin, China, 4–6 December 2019; pp. 633–638. [Google Scholar] [CrossRef]
- Moreno-Salinas, D.; Pascoal, A.; Aranda, J. Sensor networks for optimal target localization with bearings-only measurements in constrained three-dimensional scenarios. Sensors 2013, 13, 10386–10417. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, M.; Zhang, S.; Chen, H. Node topology effect on target tracking based on underwater wireless sensor networks. In Proceedings of the 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 7–10 July 2014; pp. 1–8. [Google Scholar]
- Chen, S. The KKT optimality conditions for optimization problem with interval-valued objective function on Hadamard manifolds. Optimization 2022, 71, 613–632. [Google Scholar] [CrossRef]
- Boyd, S.; Boyd, S.P.; Vandenberghe, L. Convex Optimization. Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Nodes | Target Speed | Algorithm in [35] | Algorithm in [30] | Our Algorithm |
|---|---|---|---|---|
| 4 | 1,1,1 | 2.7358 | 2.1998 | 1.9915 |
| 4 | 5,5,1 | 4.7154 | 2.9405 | 2.6358 |
| 4 | 15,15,1 | 8.4613 | 6.5201 | 4.4348 |
| 8 | 5,5,1 | 2.6527 | 1.7071 | 1.6421 |
| 16 | 5,5,1 | 2.4136 | 1.5231 | 1.5008 |
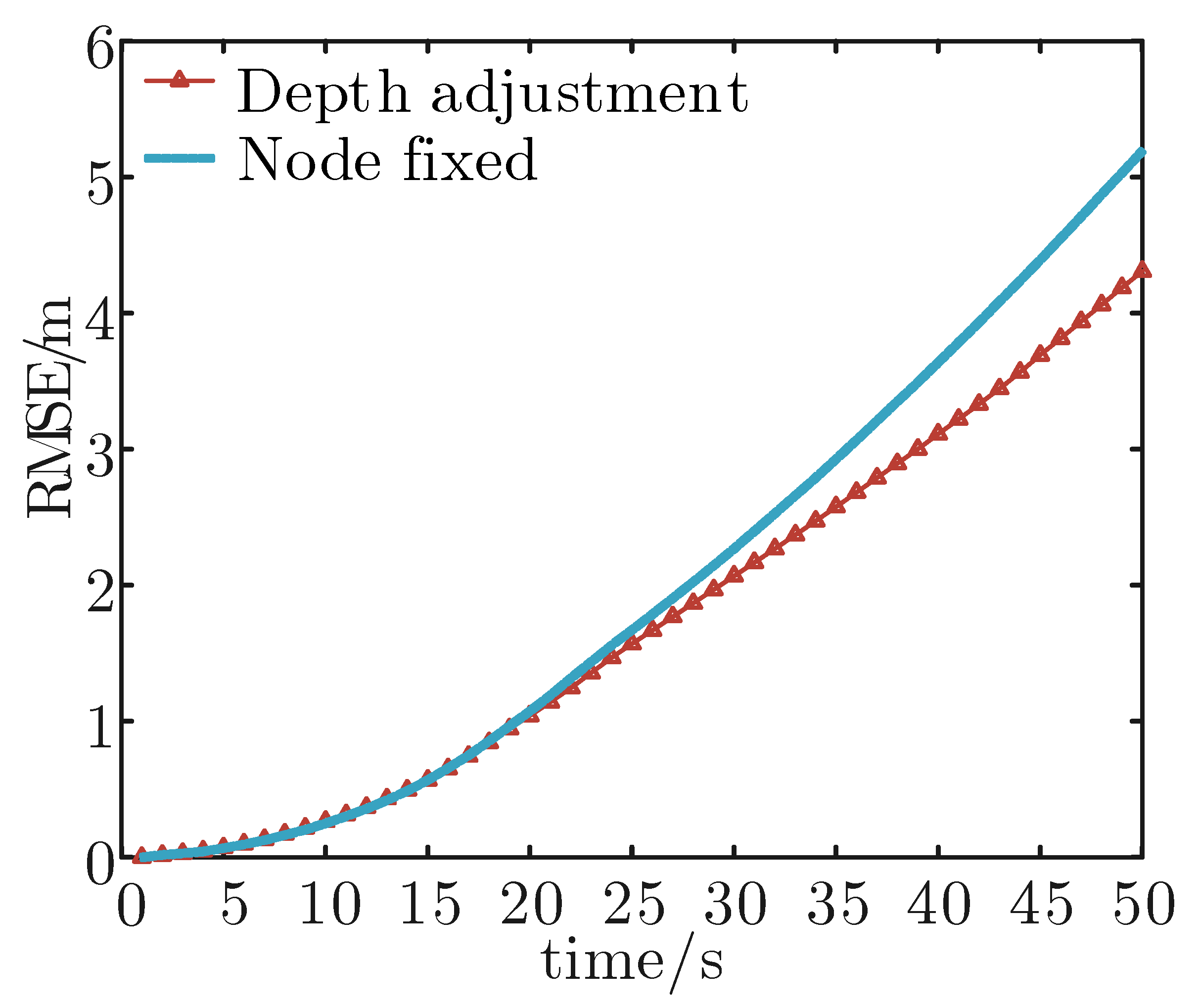
| Average RMSE/m | Average Moving Distance/m | |
|---|---|---|
| Depth adjustment | 1.7495 | 40 |
| Node fixed | 2.2898 | 0 |
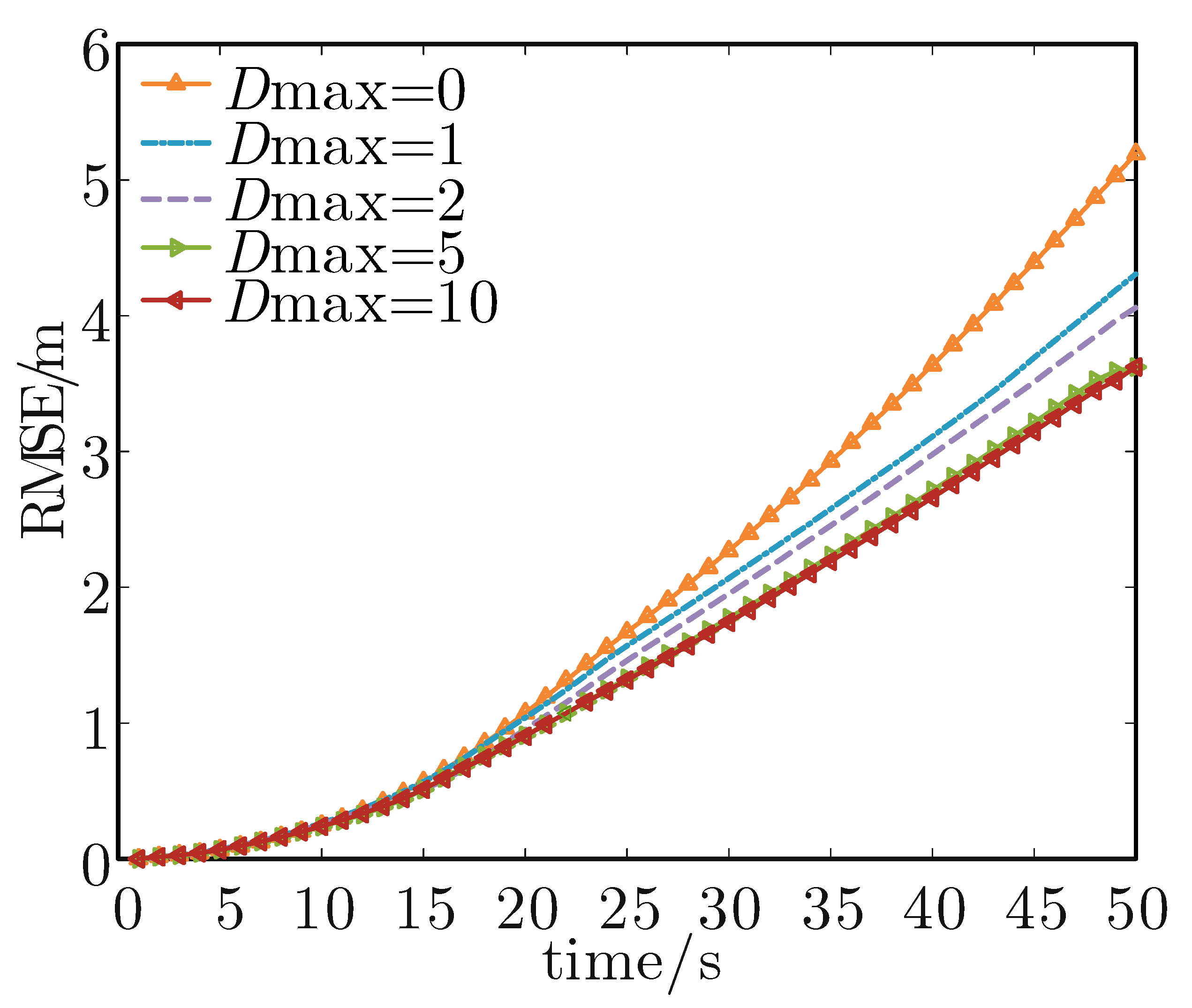
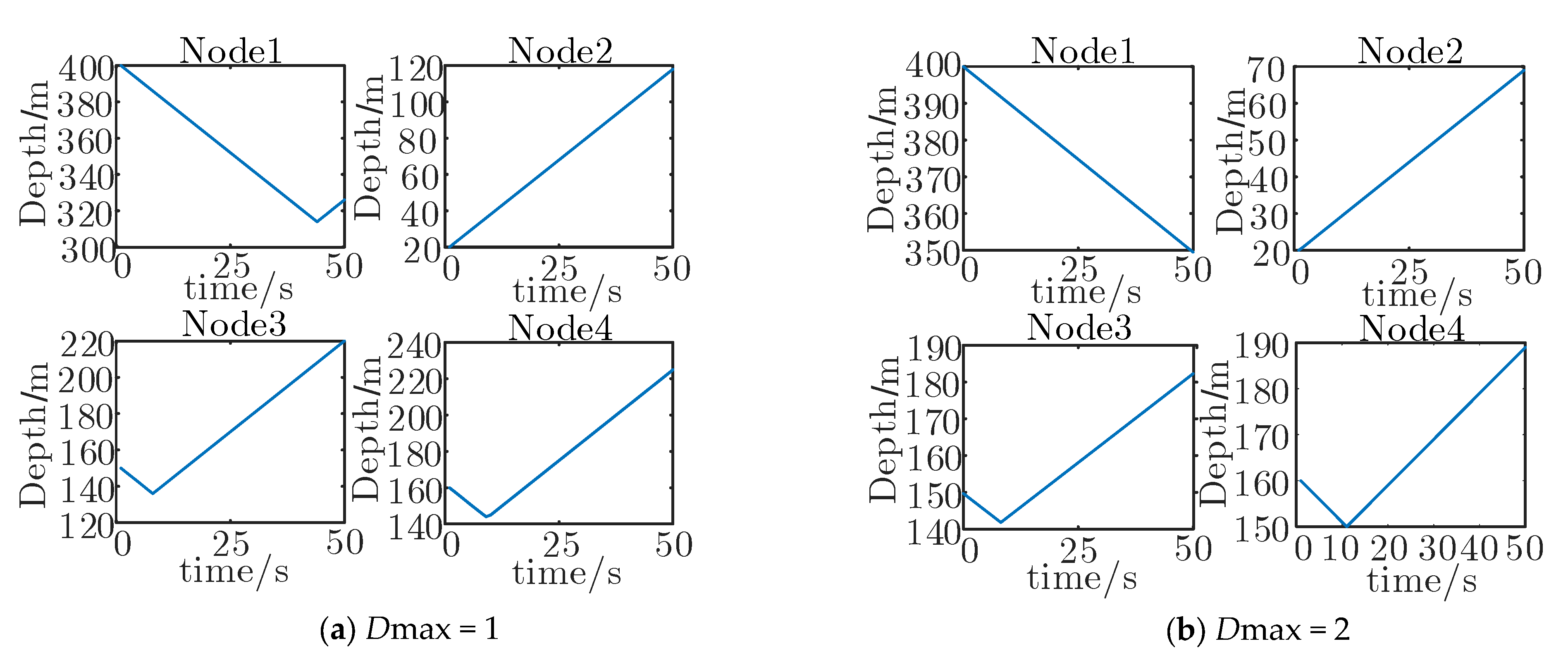
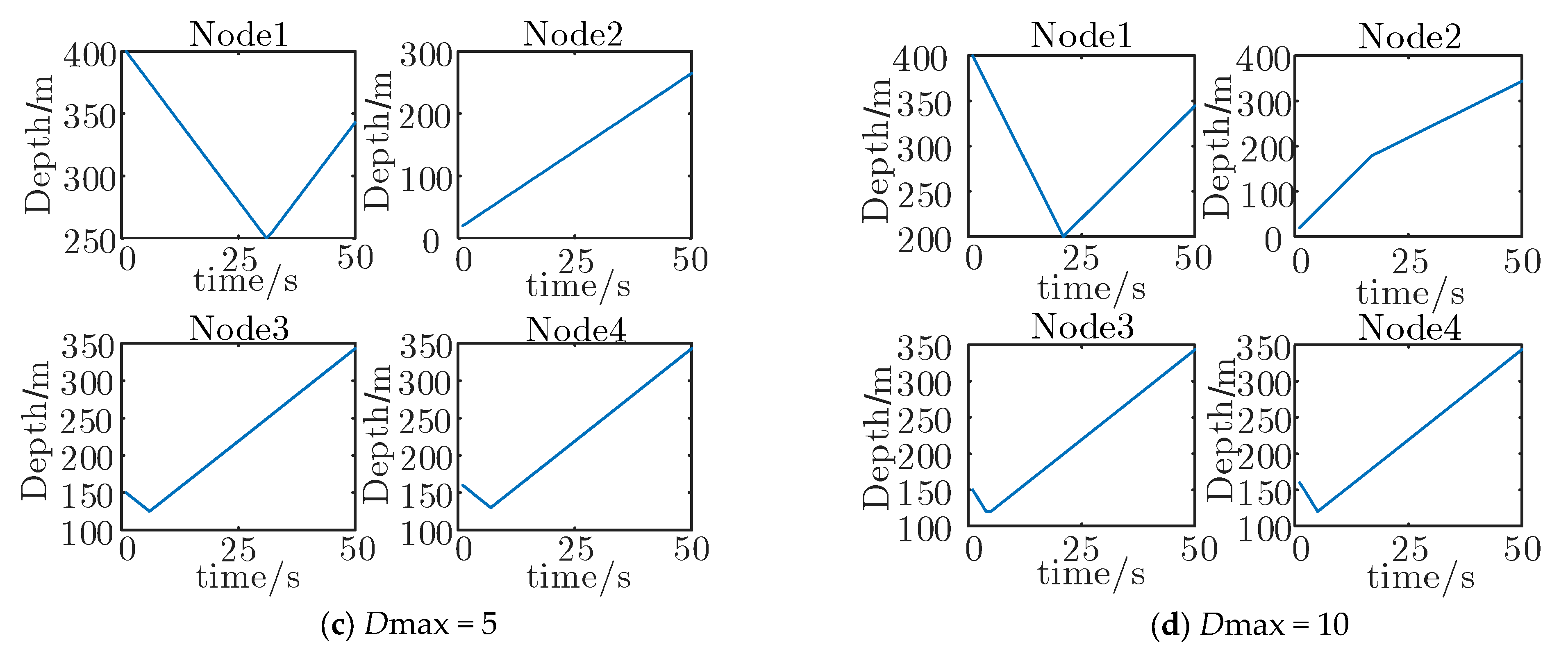
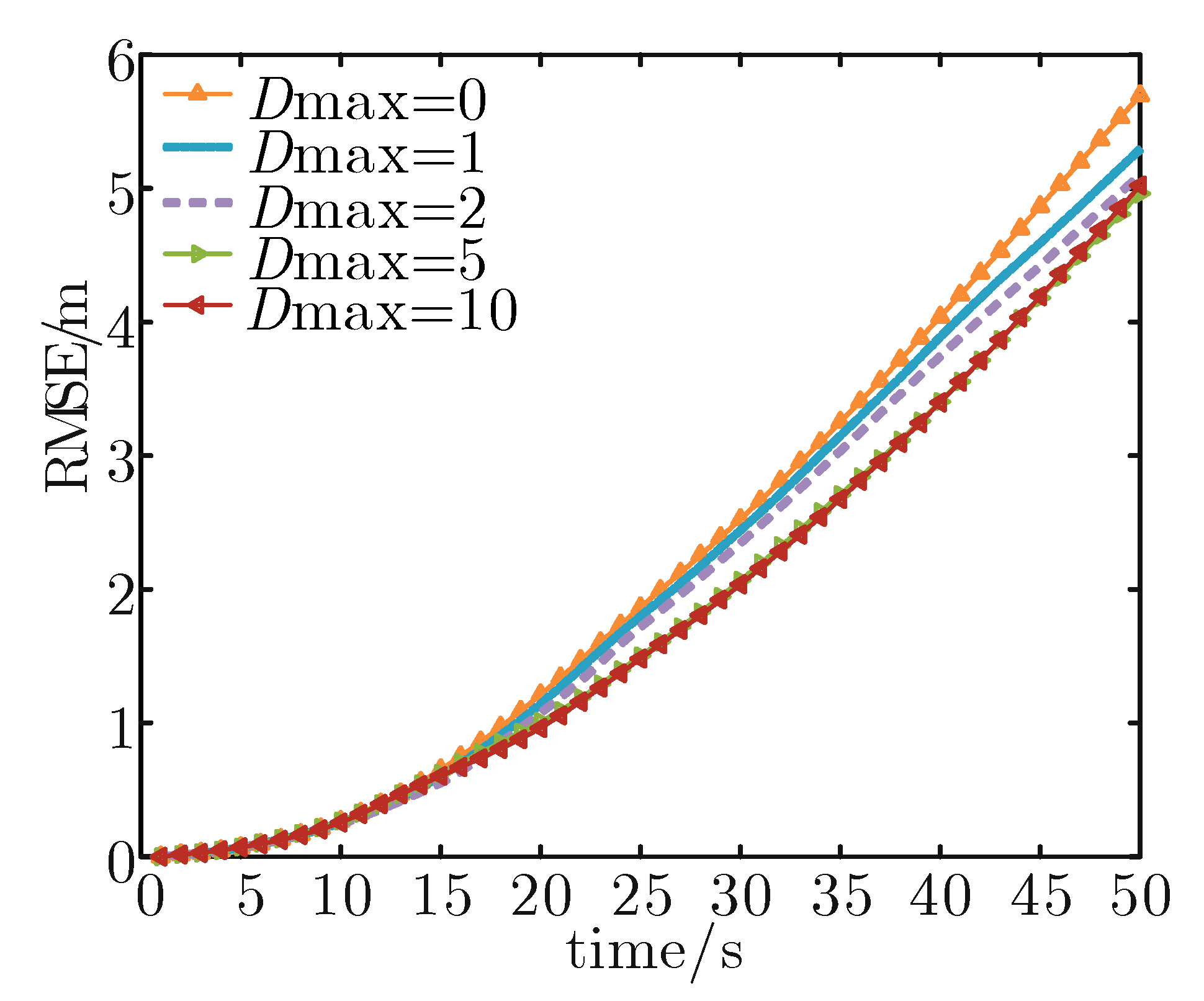
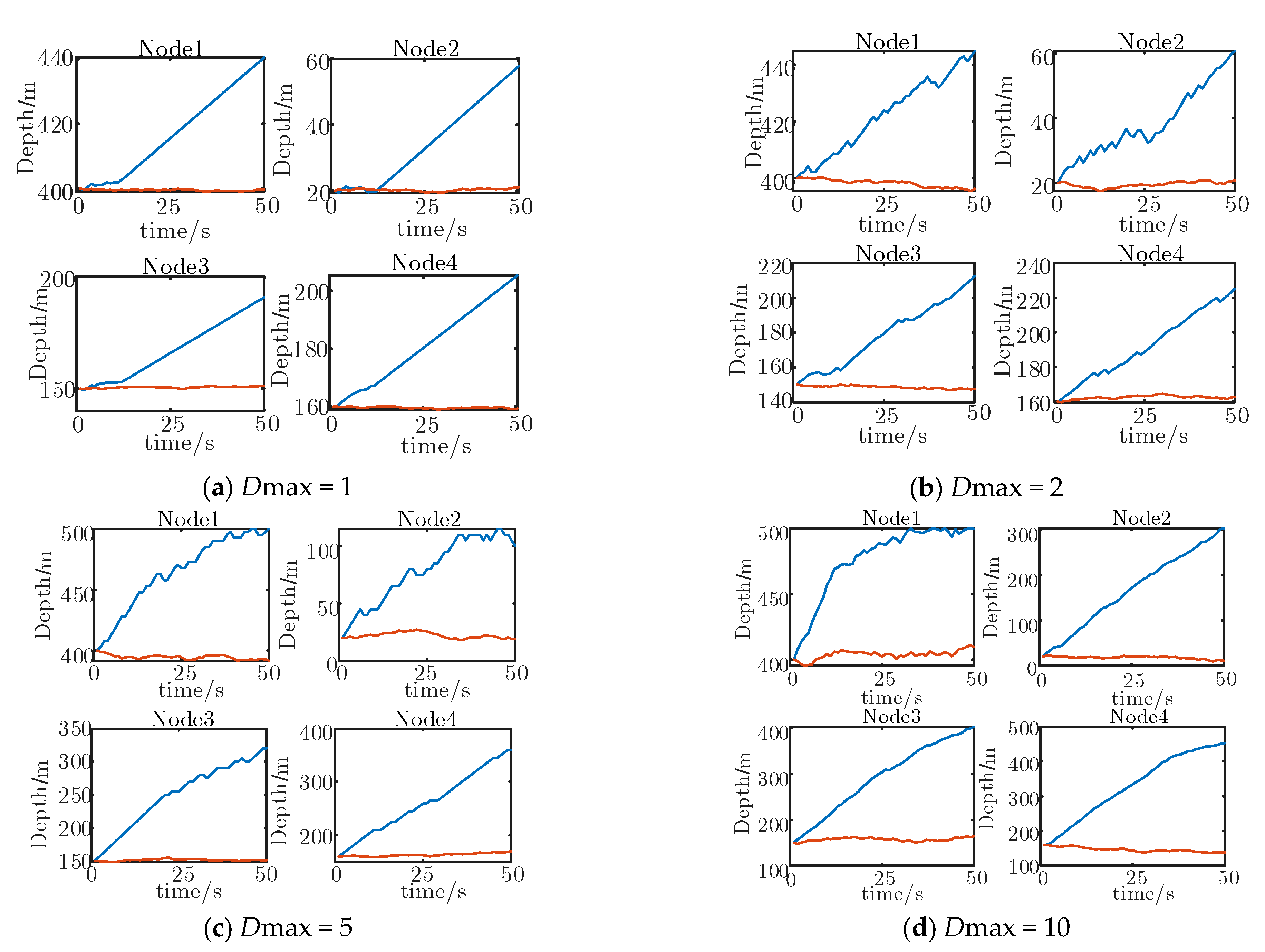
| Dmax | Average RMSE/m | Average Moving Distance/m |
|---|---|---|
| 0 | 2.2898 | 0 |
| 1 | 1.7495 | 40 |
| 2 | 1.6546 | 76.73 |
| 5 | 1.5175 | 169.49 |
| 10 | 1.4933 | 188.83 |
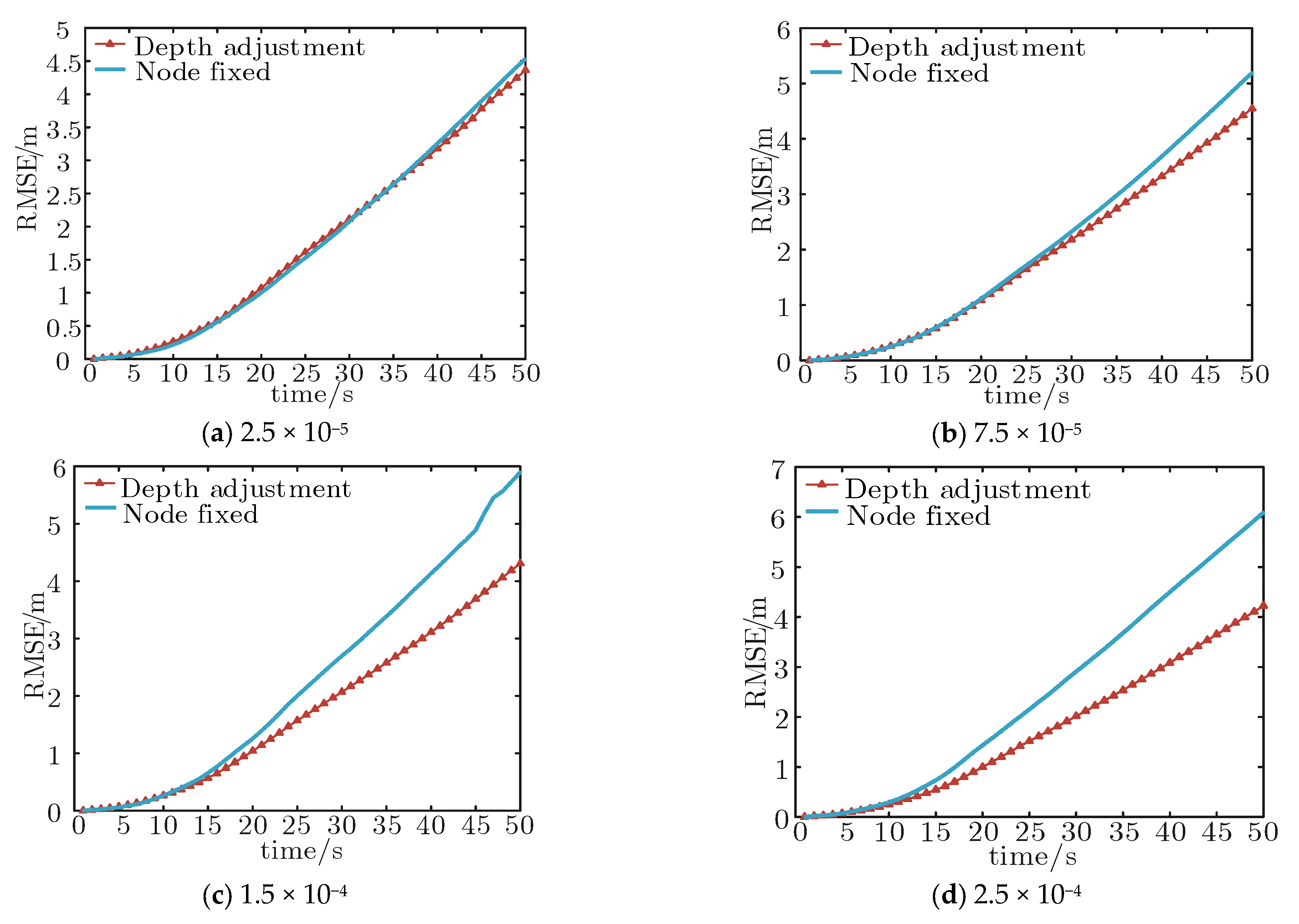
| Multiplicative Noise | Algorithm | Average RMSE/m | Improvement |
|---|---|---|---|
| 2.5 × 10−5 | Depth adjustment | 1.7866 | 0.30% |
| Node fixed | 1.7902 | ||
| 7.5 × 10−5 | Depth adjustment | 1.8494 | 9.35% |
| Node fixed | 2.0223 | ||
| 1.5 × 10−4 | Depth adjustment | 1.7495 | 30.89% |
| Node fixed | 2.2898 | ||
| 2.5 × 10−4 | Depth adjustment | 1.7148 | 43.81% |
| Node fixed | 2.4657 |
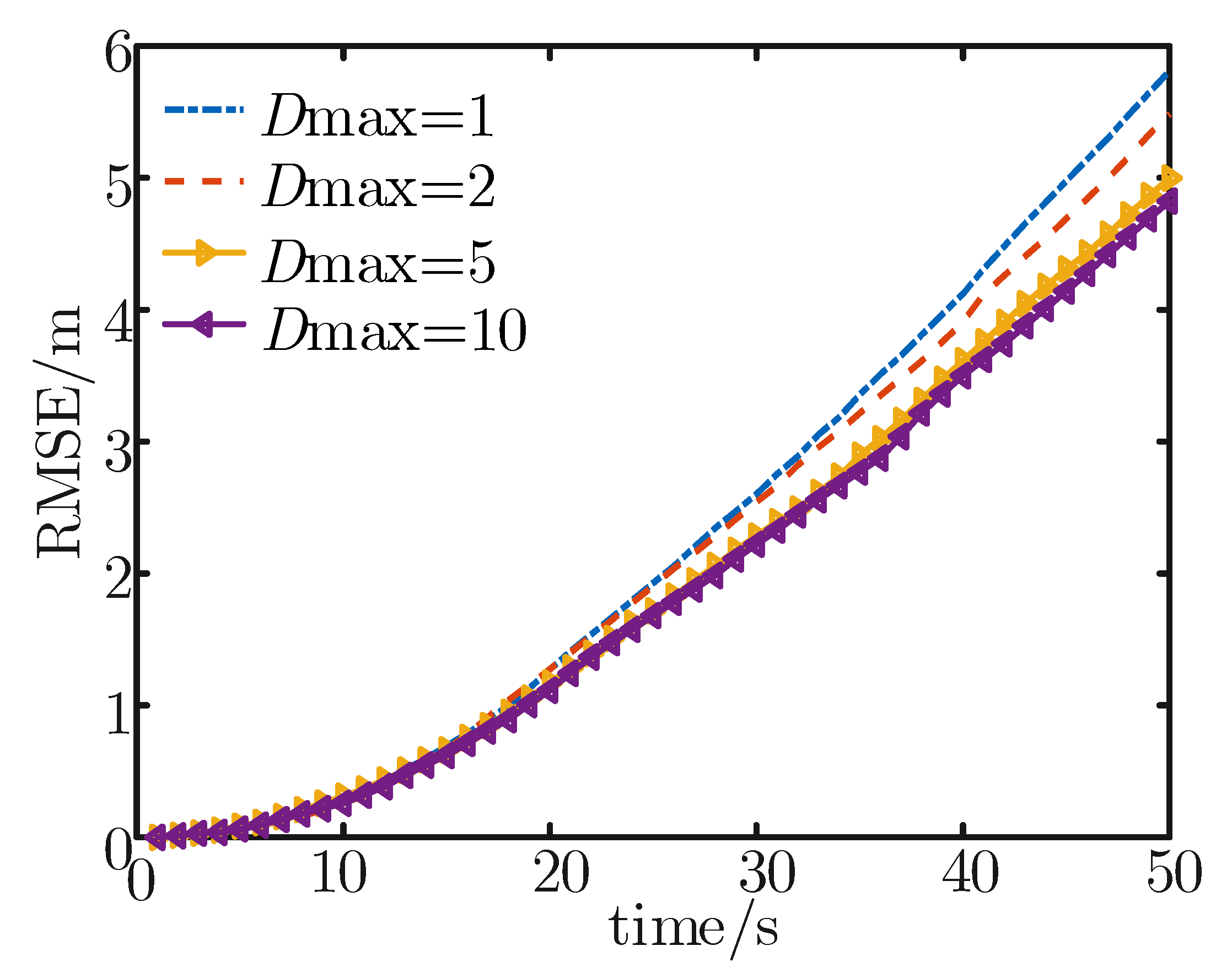
| Dmax/m | Average RMSE/m | Average Moving Distance/m |
|---|---|---|
| 0 | 2.2101 | 0 |
| 1 | 2.1061 | 41.09 |
| 2 | 2.0211 | 53.29 |
| 5 | 1.8759 | 137.49 |
| 10 | 1.8632 | 232.11 |
| Dmax/m | Average RMSE/m | Average Moving Distance/m |
|---|---|---|
| 1 | 2.2741 | 0.31 |
| 2 | 2.1781 | 2.38 |
| 5 | 1.9976 | 5.15 |
| 10 | 1.9224 | 13.35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Tian, S.; Yang, Y. Node Depth Adjustment Based Target Tracking in Sparse Underwater Sensor Networks. J. Mar. Sci. Eng. 2023, 11, 372. https://doi.org/10.3390/jmse11020372
Zhang Z, Tian S, Yang Y. Node Depth Adjustment Based Target Tracking in Sparse Underwater Sensor Networks. Journal of Marine Science and Engineering. 2023; 11(2):372. https://doi.org/10.3390/jmse11020372
Chicago/Turabian StyleZhang, Zhenkai, Shengkai Tian, and Yi Yang. 2023. "Node Depth Adjustment Based Target Tracking in Sparse Underwater Sensor Networks" Journal of Marine Science and Engineering 11, no. 2: 372. https://doi.org/10.3390/jmse11020372
APA StyleZhang, Z., Tian, S., & Yang, Y. (2023). Node Depth Adjustment Based Target Tracking in Sparse Underwater Sensor Networks. Journal of Marine Science and Engineering, 11(2), 372. https://doi.org/10.3390/jmse11020372