
Quantized Sliding Mode Fault-Tolerant Control for Unmanned Marine Vehicles with Thruster Saturation



Abstract
:1. Introduction
- (1)
- Based on the sliding mode technique, a new fault-tolerant controller is designed, which can ensure the asymptotic stability of UMVs system and compensate the effects of quantization, thruster failure and saturation.
- (2)
- The relationship among UMVs quantization parameter, fault information and desired target is revealed. A more comprehensive range of quantitative parameter adjustment is given. This range can be reduce to the result with neglecting desired target in [28], and further reduce to the existing result with neglecting thruster failure in [29].
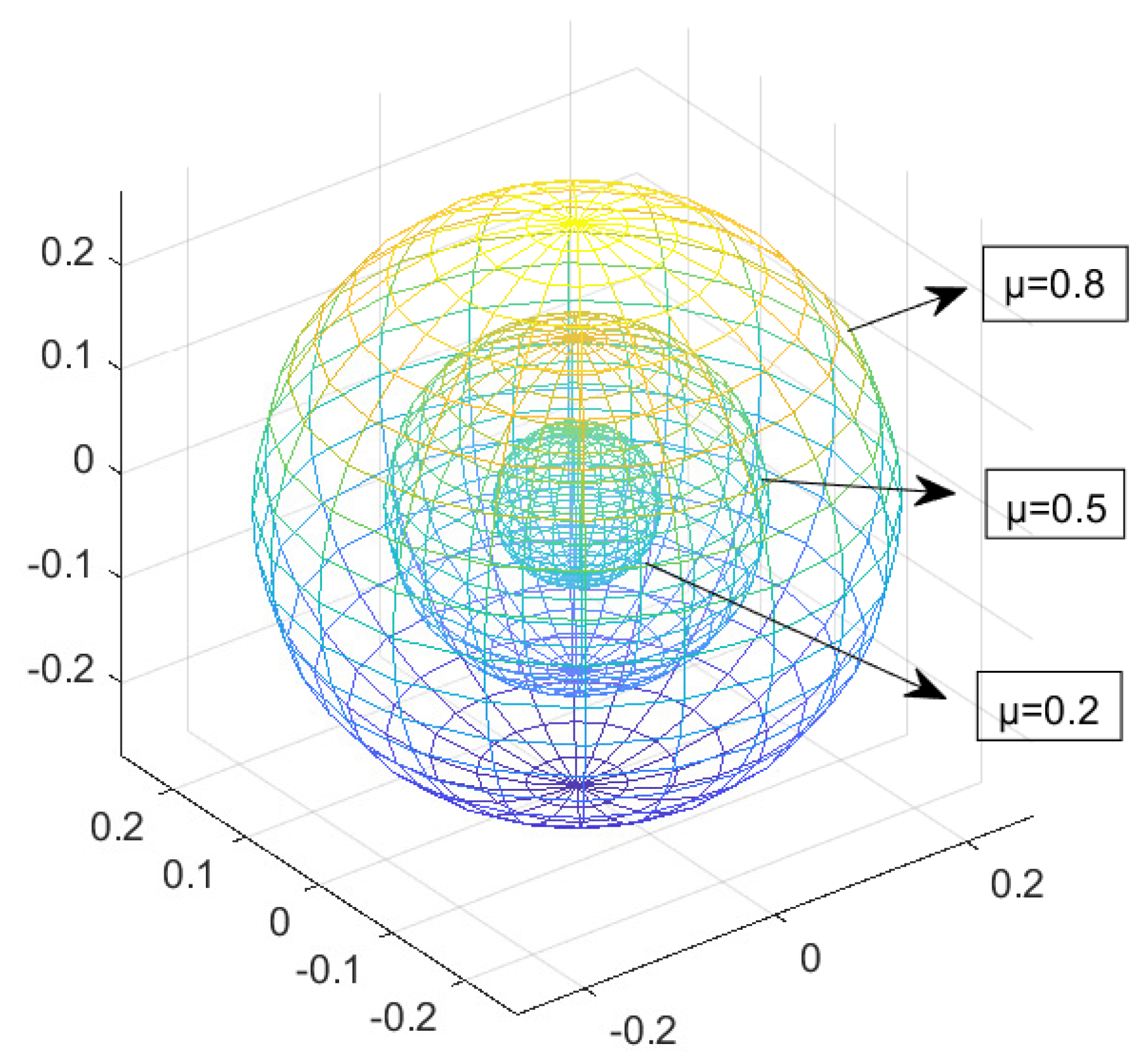
- (3)
- The region of attraction (sphere ) affected by thruster failure is described, and through the optimization parameter k solved by linear matrix inequalities (LMIs), the optimized region of attraction can be obtained.
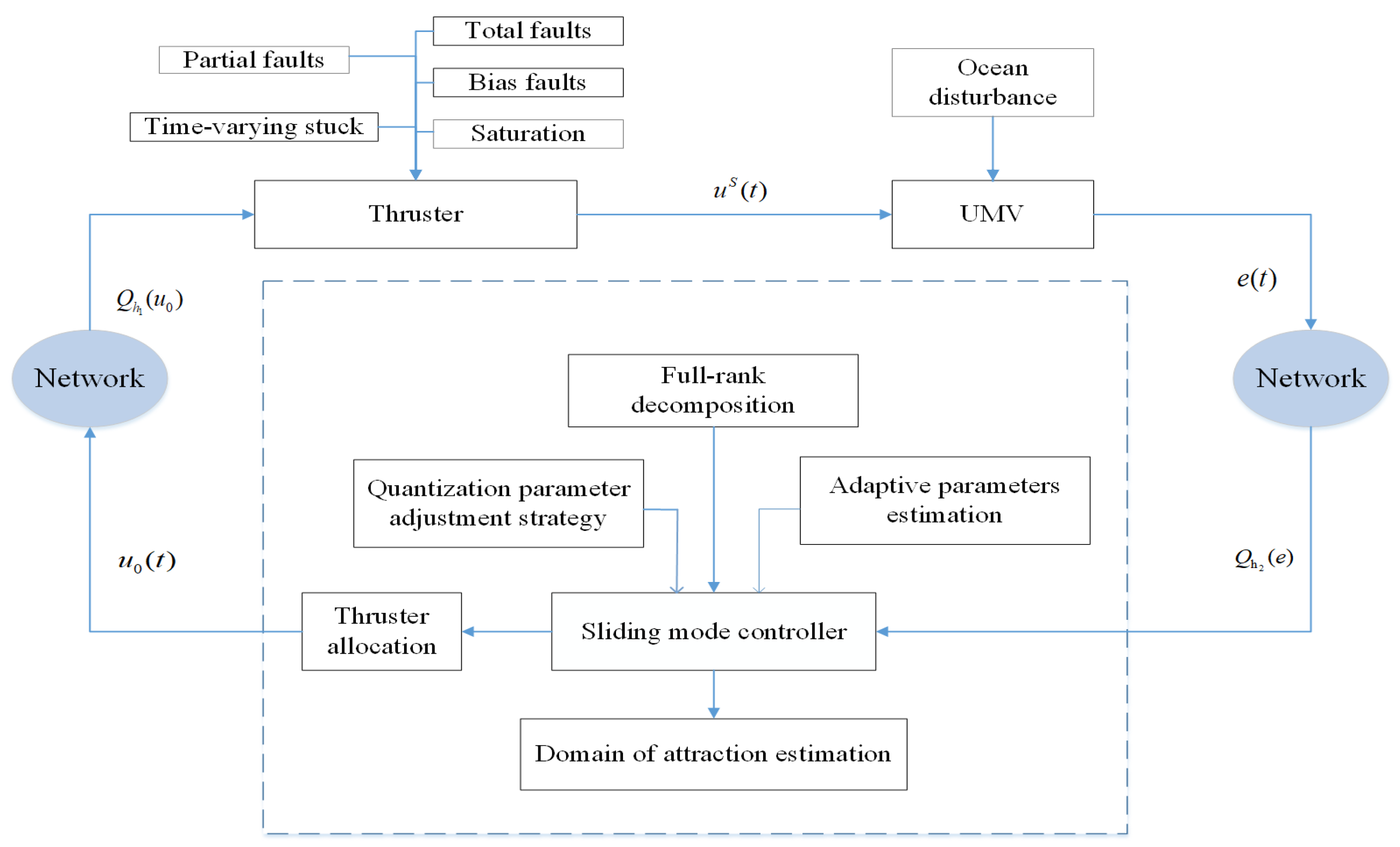
2. Problem Statement
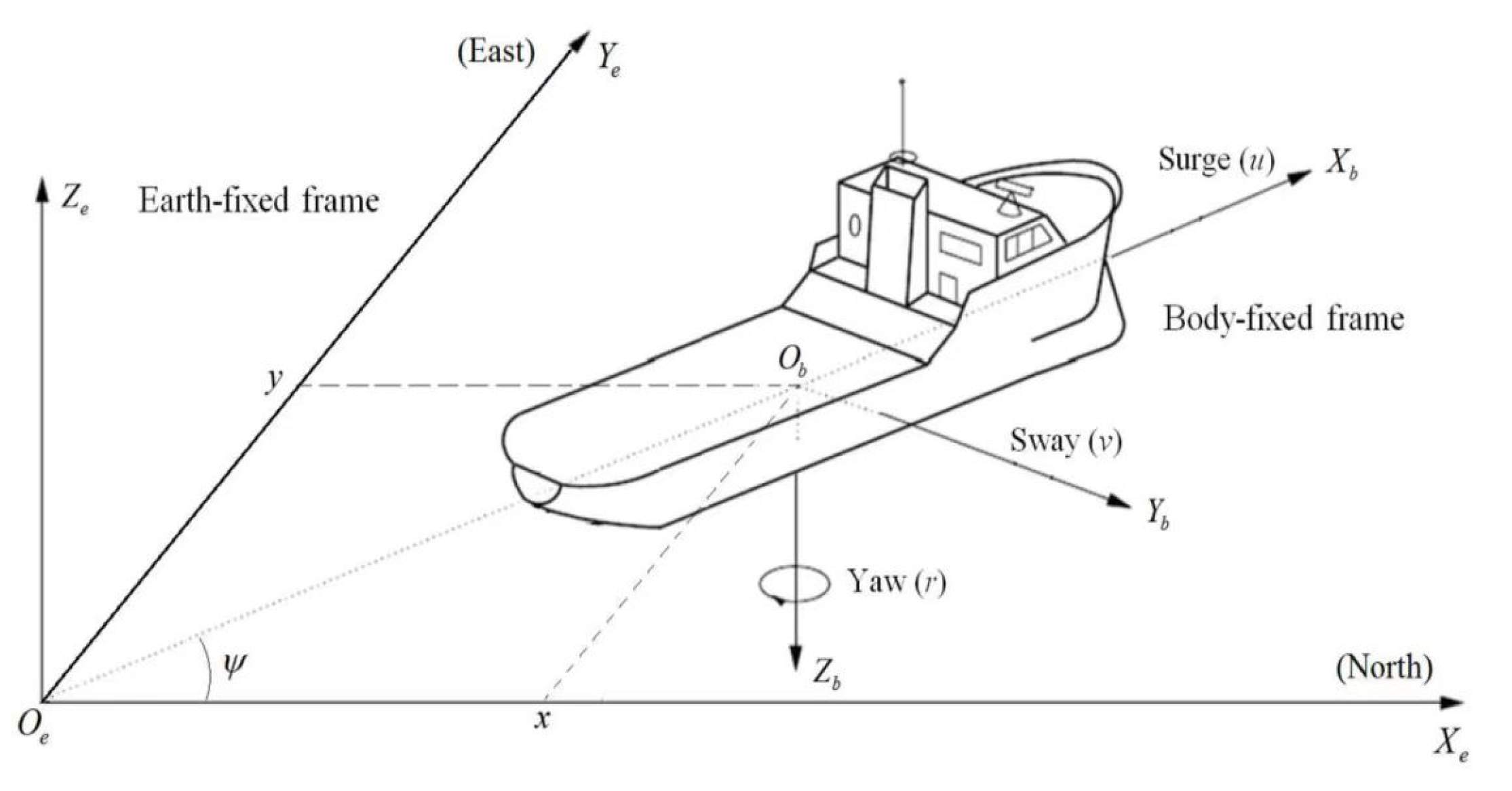
2.1. UMV Model
2.2. Quantizer Model
2.3. Design Objectives
3. Main Results
3.1. Stability Analysis
3.2. Sliding-Mode Control Law Design
| Algorithm 1: Quantized FTC Algorithm |
Input: Choosing initial conditions , , and an adjustable parameter Output: . 1: if , then 2: Find matrices , N satisfying (9). 3: Find the optimal solution according to (11). 4: Construct sliding surface S according to (10). 5: The parameter matrices and are dynamically updated through (24). 6: Construct sliding mode control law (19) and implement to the UMV system (7). 8: else exit 9: end if |
Remark 3.
| Algorithm 2 Adjustment Strategy of Quantization Parameter . |
| Input: Select as the initial value of , ℧ is chosen as |
| , the parameter ℑ meets . |
| Output: . |
| i=0; |
| error=1; |
| 1:while error do |
| 2: if then |
| 3: |
| 4: error=0 |
| 5: else |
| 6: ; |
| ; |
| 7: end if |
| 8: end while |
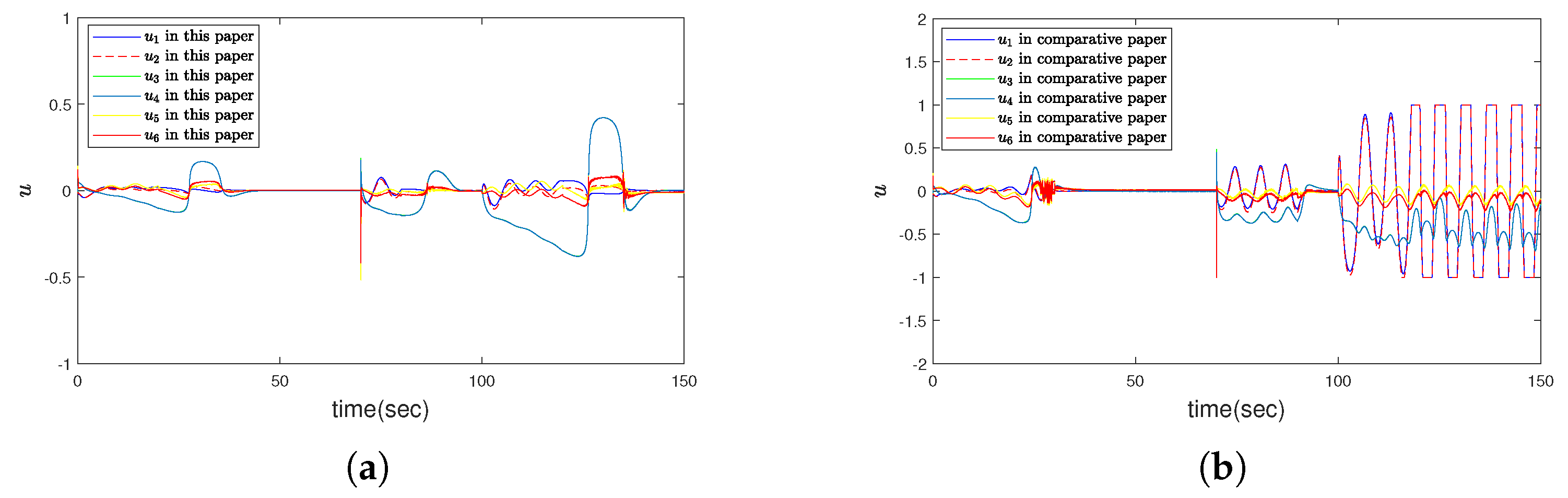
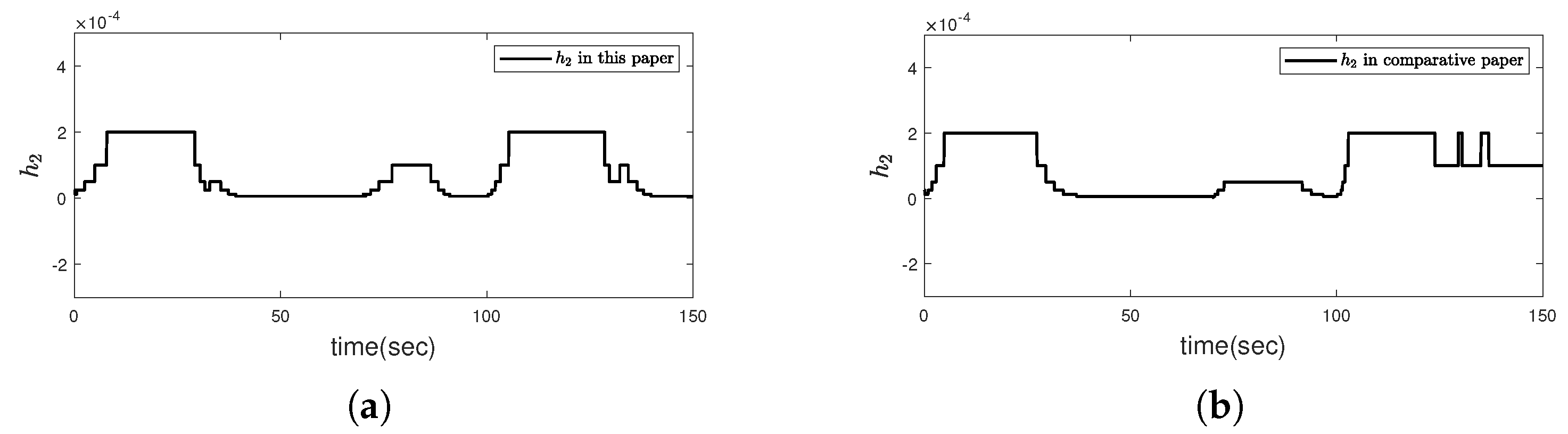
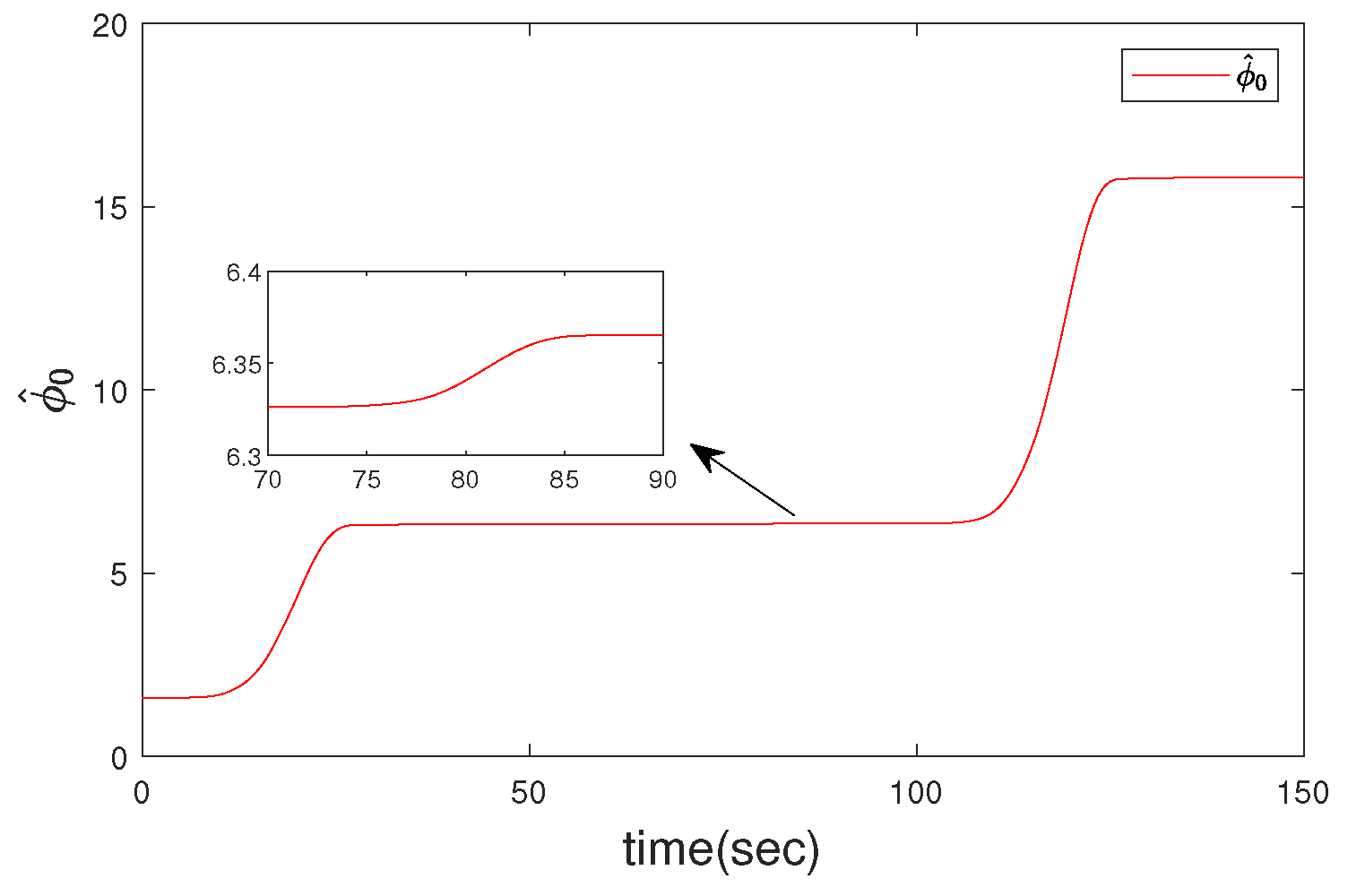
4. Simulation
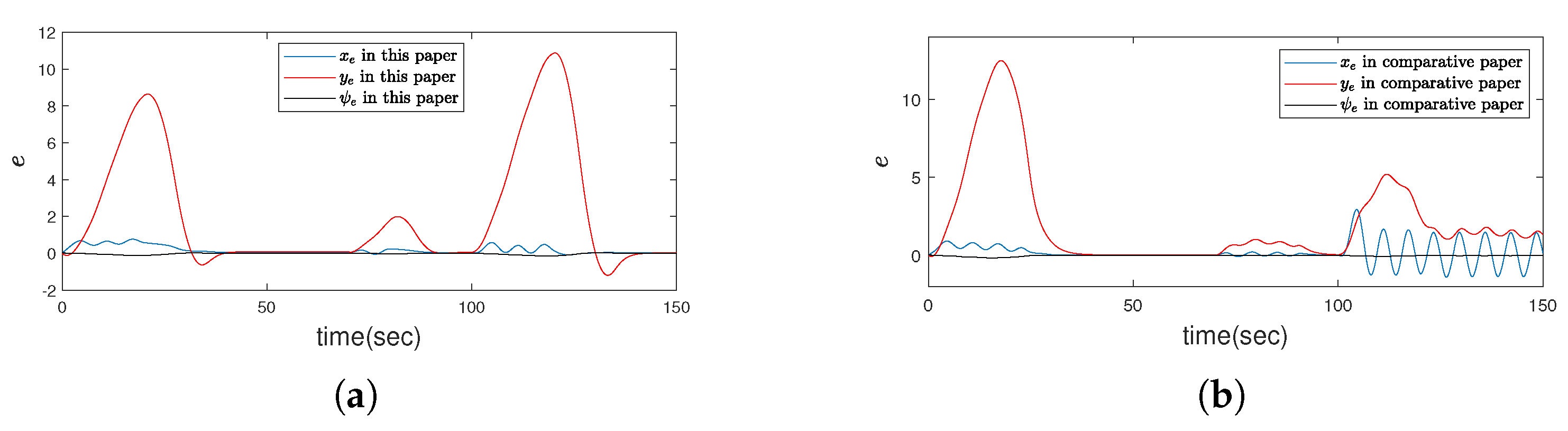
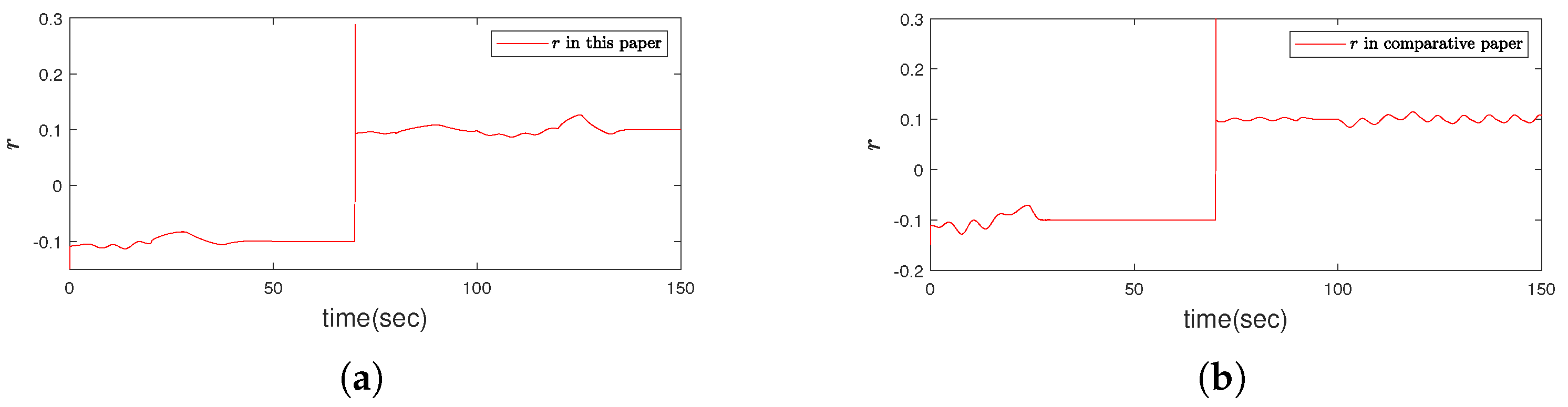
4.1. Simulation Results
4.2. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fossen, T.I. Guidance and control of ocean vehicles. Automatica 1996, 32, 1235. [Google Scholar]
- Guze, S.; Wawrzynski, W.; Wilczynski, P. Determination of parameters describing the risk areas of ships chaotic rolling on the example of LNG carrier and OSV vessel. J. Mar. Sci. Eng. 2020, 8, 91. [Google Scholar] [CrossRef]
- Li, Y.X.; Yang, G.H. Adaptive asymptotic tracking control of uncertain nonlinear systems with input quantization and actuator faults. Automatica 2016, 72, 177–185. [Google Scholar] [CrossRef]
- Guo, X.G.; Wang, J.L.; Liao, F. Adaptive quantised observer-based output feedback control for non-linear systems with input and output quantisation. IET Control. Theory Appl. 2017, 11, 263–272. [Google Scholar] [CrossRef]
- Hao, L.Y.; Yu, Y.; Li, T.S.; Li, H. Quantized output-feedback control for unmanned marine vehicles with thruster faults via sliding-mode technique. IEEE Trans. Cybern. 2022, 52, 9363–9376. [Google Scholar] [CrossRef]
- Ye, Z.; Zhang, D.; Cheng, J.; Wu, Z.G. Event-triggering and quantized sliding mode control of UMV systems under dos attack. IEEE Trans. Veh. Technol. 2022, 71, 8199–8211. [Google Scholar] [CrossRef]
- Zhou, B.; Su, Y.M.; Huang, B.; Wang, W.; Zhang, E. Trajectory tracking control for autonomous underwater vehicles under quantized state feedback and ocean disturbances. Ocean. Eng. 2022, 256, 111500. [Google Scholar] [CrossRef]
- Yan, Y.; Yu, S.H. Sliding mode tracking control of autonomous underwater vehicles with the effect of quantization. Ocean. Eng. 2018, 151, 322–328. [Google Scholar] [CrossRef]
- An, S.; Wang, L.; He, Y. Adaptive backstepping sliding mode tracking control for autonomous underwater vehicles with input quantization. Adv. Theory Simulations 2022, 5, 2100445. [Google Scholar] [CrossRef]
- Yan, Y.; Yu, S.; Yu, S. Quantized super-twisting algorithm based sliding mode control. Automatica 2019, 105, 43–48. [Google Scholar] [CrossRef]
- Cheng, Y.; Liu, T.; Weng, R. Sliding mode control of continuous-time switched systems with signal quantization and actuator nonlinearit. Sci. Prog. 2020, 103, 1–21. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Zhang, L.X.; Shi, P.; Zhao, Y. Sliding mode control of continuous-time markovian jump systems with digital data transmission. Automatica 2017, 80, 200–209. [Google Scholar] [CrossRef]
- Wang, Y.; Jiang, B.; Wu, Z.G.; Xie, S.; Peng, Y. Adaptive sliding mode fault-tolerant fuzzy tracking control with application to unmanned marine vehicles. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6691–6700. [Google Scholar] [CrossRef]
- Ma, H.; Zhou, Q.; Bai, L.; Liang, H. Observer-based adaptive fuzzy fault-tolerant control for stochastic nonstrict-feedback nonlinear systems with input quantization. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 287–298. [Google Scholar] [CrossRef]
- Hao, L.Y.; Zhang, H.; Li, H.; Li, T.S. Sliding mode fault-tolerant control for unmanned marine vehicles with signal quantization and time-delay. Ocean. Eng. 2020, 215, 107882. [Google Scholar] [CrossRef]
- Cavanini, L.; Ippoliti, G. Fault tolerant model predictive control for an over-actuated vessel. Ocean. Eng. 2018, 160, 1–9. [Google Scholar] [CrossRef]
- Najafi, A.; Vu, M.T.; Mobayen, S.; Asad, J.H.; Fekih, A. Adaptive barrier fast terminal sliding mode actuator fault tolerant control approach for quadrotor UAVs. Mathematics 2022, 10, 3009. [Google Scholar] [CrossRef]
- Ao, W.; Song, Y.D.; Wen, C.Y. Adaptive robust fault tolerant control design for a class of nonlinear uncertain MIMO systems with quantization. ISA Trans. 2017, 68, 63–72. [Google Scholar] [CrossRef]
- Chen, L.; Fu, S.; Zhao, Y. Fault-tolerant control for unmanned surface vehicles with digital communication channel. In Advances in Guidance, Navigation and Control; Springer: Singapore, 2022; pp. 1589–1597. [Google Scholar]
- Li, M.; Shi, P.; Liu, M. Event-triggered-based adaptive sliding mode control for T–S fuzzy systems with actuator failures and signal quantization. IEEE Trans. Fuzzy Syst. 2021, 29, 1363–1374. [Google Scholar] [CrossRef]
- Shi, P.; Liu, M.; Zhang, L. Fault-tolerant sliding-mode-observer synthesis of markovian jump systems using quantized measurements. IEEE Trans. Ind. Electron. 2015, 62, 5910–5918. [Google Scholar] [CrossRef]
- Chen, L.; Liu, M.; Huang, X.; Fu, S.; Qiu, J. Adaptive fuzzy sliding mode control for network-based nonlinear systems with actuator failures. IEEE Trans. Fuzzy Syst. 2018, 26, 1311–1323. [Google Scholar] [CrossRef]
- Vu, M.T.; Le, T.H.; Thanh, H.N. Robust position control of an over-actuated underwater vehicle under model uncertainties and ocean current effects using dynamic sliding mode surface and optimal allocation control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef]
- Wang, N.; Deng, Z. Finite-time fault estimator based fault-tolerance control for a surface vehicle with input saturations. IEEE Trans. Ind. Inform. 2020, 16, 1172–1181. [Google Scholar] [CrossRef]
- Su, Y.; Zheng, C.; Mercorelli, P. Nonlinear pd fault tolerant control for dynamic positioning of ships with actuator constraints. IEEE/ASME Trans. Mech. 2017, 22, 1132–1142. [Google Scholar] [CrossRef]
- Ghaffari, V.; Mobayen, S.; ud Din, S.; Rojsiraphisal, T.; Vu, M.T. Robust tracking composite nonlinear feedback controller design for time-delay uncertain systems in the presence of input saturatio. ISA Trans. 2022, 129, 88–99. [Google Scholar] [CrossRef]
- Hu, J.; Ghaffari, V.; Mobayen, S.; Asad, J.H.; Vu, M.T. Robust composite nonlinear feedback control based on integral sliding-mode control of uncertain time-delay systems under input saturation. J. Vib. Control. 2022. [Google Scholar] [CrossRef]
- Hao, L.Y.; Yang, G.H. Fault-tolerant control via sliding-mode output feedback for uncertain linear systems with quantisation. IET Control. Theory Appl. 2013, 7, 1992–2006. [Google Scholar] [CrossRef]
- Zheng, B.C.; Yang, G.H. Quantised feedback stabilisation of planar systems via switching-based sliding-mode control. IET Control. Theory Appl. 2012, 6, 149–156. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002; ISBN 8292356002. [Google Scholar]
- Zhu, Z.; Xia, Y.Q.; Fu, M.Y. Adaptive sliding mode control for attitude stabilization with actuator saturation. IEEE Trans. Ind. Electron. 2011, 58, 4898–4907. [Google Scholar] [CrossRef]
- Xue, Y.; Zheng, B.C.; Yu, X. Robust sliding mode control for TS fuzzy systems via quantized state feedback. IEEE Trans. Fuzzy Syst. 2017, 26, 2261–2272. [Google Scholar] [CrossRef]
- Hao, L.Y.; Zhang, H.; Li, T.S.; Lin, B.; Chen, C.L.P. Fault Tolerant Control for Dynamic Positioning of Unmanned Marine Vehicles based on T-S Fuzzy Model with Unknown Membership Functions. IEEE Trans. Veh. Technol. 2021, 70, 146–157. [Google Scholar] [CrossRef]
- Hao, L.Y.; Zhang, H.; Guo, G.; Li, H. Quantized Sliding Mode Control of Unmanned Marine Vehicles: Various Thruster Faults Tolerated With a Unified Model. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2012–2026. [Google Scholar] [CrossRef]
- Alattas, K.A.; Vu, M.T.; Mofid, O.; El-Sousy, F.F.; Alanazi, A.K.; Awrejcewicz, J.; Mobayen, S. Adaptive nonsingular terminal sliding mode control for performance improvement of perturbed nonlinear systems. Mathematics 2022, 10, 1064. [Google Scholar] [CrossRef]
- Han, H.C. An analysis and design method for uncertain variable. IEEE Trans. Autom. Control. 2004, 49, 602–607. [Google Scholar]
- Hao, L.Y.; Yang, G.H. Fault tolerant control for a class of uncertain chaotic systems with actuator saturation. Nonlinear Dyn. 2013, 73, 2133–2147. [Google Scholar] [CrossRef]
- Matallana, L.G.; Blanco, A.M.; Bandoni, J.A. Nonlinear dynamic systems design based on the optimization of the domain of attraction. Math. Comput. Model. 2011, 53, 731–745. [Google Scholar] [CrossRef]
- Kahveci, N.E.; Ioannou, P.A. Adaptive steering control for uncertain ship dynamics and stability analysis. Automatica 2013, 49, 685–697. [Google Scholar] [CrossRef]
- Wang, Y.L.; Han, Q.L. Network-based modelling and dynamic output feedback control for unmanned marine vehicles in network environments. Automatica 2018, 91, 43–53. [Google Scholar] [CrossRef]
- Fossen, T.I.; Sagatun, S.I.; Sørensen, A.J. Identification of dynamically positioned ships. Control. Eng. Pract. 1996, 4, 369–376. [Google Scholar] [CrossRef]
- Huang, H.; Wan, L.; Chang, W.; Pang, Y.; Jiang, S. A fault-tolerable control scheme for an open-frame underwater vehicle. Int. J. Adv. Robot. Syst. 2014, 11, 77. [Google Scholar] [CrossRef]
- Yang, G.H.; Ye, D. Reliable H∞ control of linear systems with adaptive mechanism. IEEE Trans. Autom. Control. 2010, 55, 242–247. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | |||||
|---|---|---|---|---|---|
| Method in this paper | 1.7 | 11.8 | 0.41 | ||
| Method in [15] | 1.3 | 2 | 1.7 | 12.3 | 1 |
| Periods with Disturbance | ||||
|---|---|---|---|---|
| 0–20 s | 1.25 | 8.8 | 39 | 40 |
| 100–120 s | 1.7 | 11.8 | 47 | 42 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, L.-Y.; Zhao, Z.-H. Quantized Sliding Mode Fault-Tolerant Control for Unmanned Marine Vehicles with Thruster Saturation. J. Mar. Sci. Eng. 2023, 11, 309. https://doi.org/10.3390/jmse11020309
Hao L-Y, Zhao Z-H. Quantized Sliding Mode Fault-Tolerant Control for Unmanned Marine Vehicles with Thruster Saturation. Journal of Marine Science and Engineering. 2023; 11(2):309. https://doi.org/10.3390/jmse11020309
Chicago/Turabian StyleHao, Li-Ying, and Zhi-Hao Zhao. 2023. "Quantized Sliding Mode Fault-Tolerant Control for Unmanned Marine Vehicles with Thruster Saturation" Journal of Marine Science and Engineering 11, no. 2: 309. https://doi.org/10.3390/jmse11020309
APA StyleHao, L.-Y., & Zhao, Z.-H. (2023). Quantized Sliding Mode Fault-Tolerant Control for Unmanned Marine Vehicles with Thruster Saturation. Journal of Marine Science and Engineering, 11(2), 309. https://doi.org/10.3390/jmse11020309