
A New Methodology-Based Sensorial System with Which to Determine the Volume of Liquid Contained in a Cylindrical Tank Subjected to Full Variations in Its Orientation




Abstract
:1. Introduction
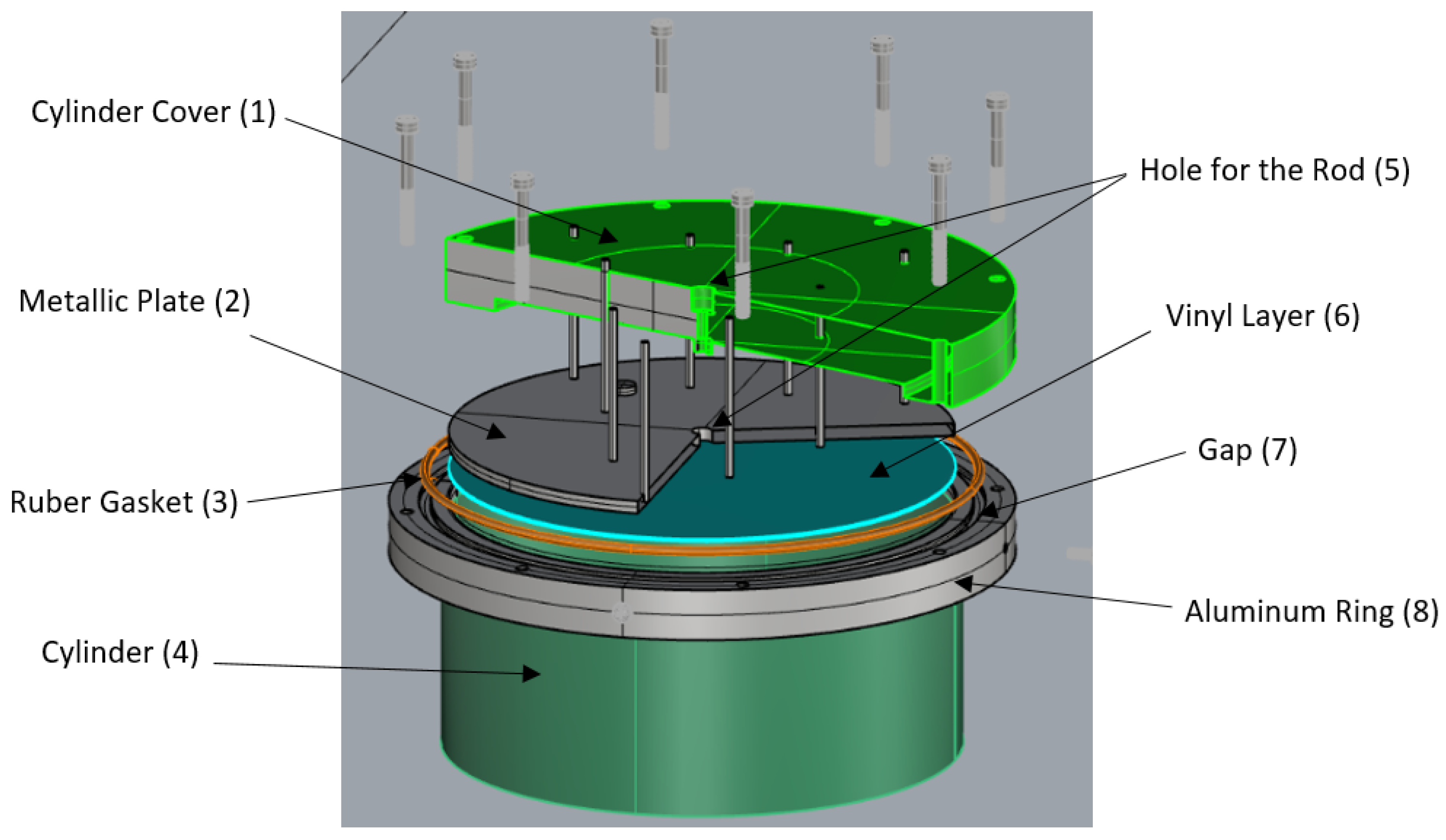
2. Description of the Proposed Capacitive Sensors
Measurement of the Wet Surface
3. Proposed Methodology
- -
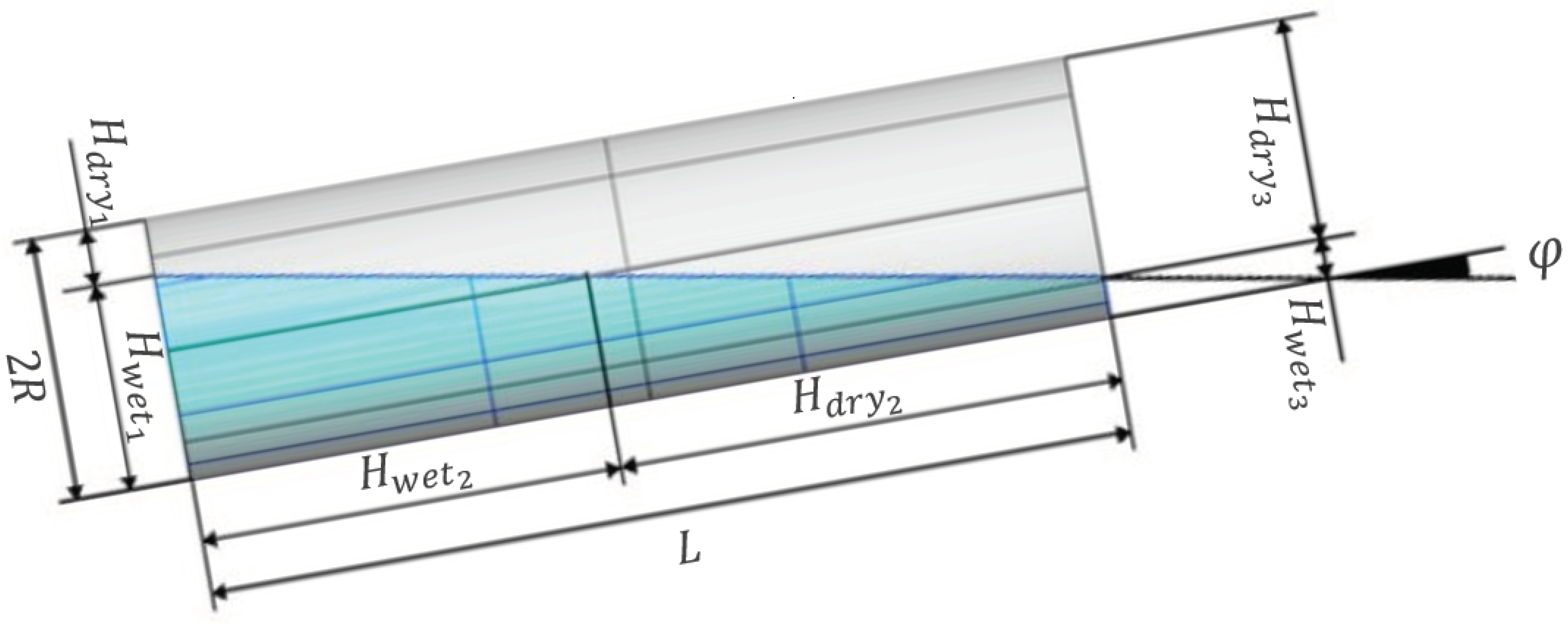
- (rad): Inclination of the longitudinal axis of the cylinder with regard to the horizontal plane.
- -
- (m): Vertical distance between the water level and the first flat side of the cylinder (denoted by the subscript 1 to represent the first sensor).
- -
- (m): Measurement of the length of the axial sensor under wet conditions (denoted by the subscript 2 to represent the second sensor).
- -
- (m): The vertical position of the water level in relation to the second flat surface of the cylinder (denoted by the subscript 3 to signify the third sensor).
- -
- : The vertical distance between the dry area and the first flat side of the cylinder, where R corresponds to the radius of the cylinder.
- -
- : The dry length of the axial sensor, where L corresponds to the length of the cylinder.
- -
- : The vertical distance between the dry area and the second flat surface of the cylinder.
- -
- : A mathematical term that represents the smallest expected positive angle for the inclination of the longitudinal axis.
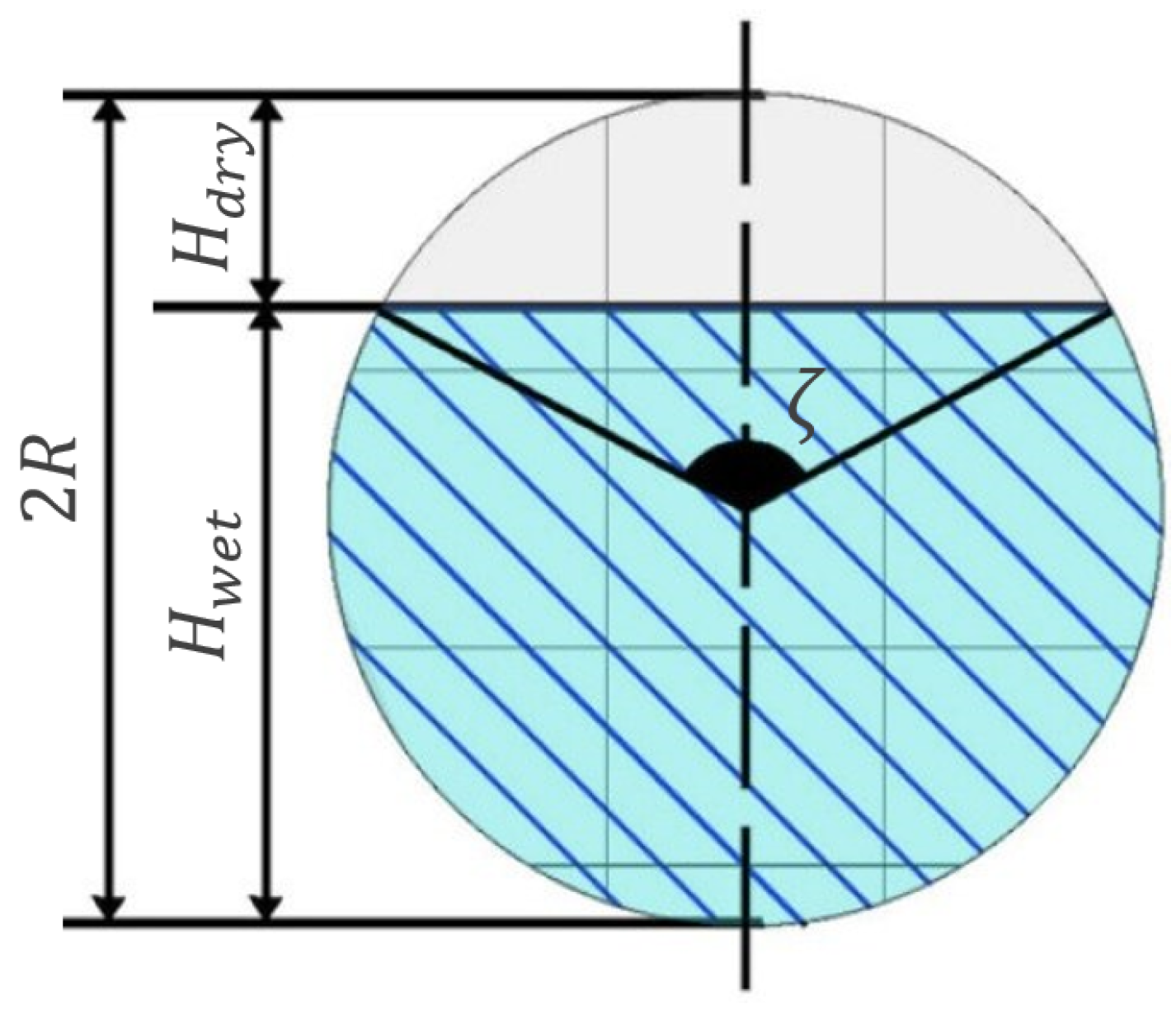
3.1. Volume of Liquid Contained in a Cylindrical Tank of Infinite Length
- -
- equals the point where the axial sensor detects the water level. , although the axial sensor does not detect the water level.
- -
- equals the maximum range of water over the circular contour of the cylinder.
- -
- The water-free surface, which is the horizontal surface that limits the upper part of the water contained and is located between 0 and .
- -
- The cylindrical surface has an infinite length. This surface limits the bottom of the water contained and is located between and .
- -
- The only flat side of the cylinder is partially wet and is located between and R.
3.2. Partially Wet Flat Faces
3.3. A Partially Wet Flat Face
3.4. Horizontal Singularity
3.5. One Totally Wet Face, While the Other Face Is Partially Wet
3.6. One Totally Wet Face, While the Other Face Is Dry
3.7. Redundant Measurements
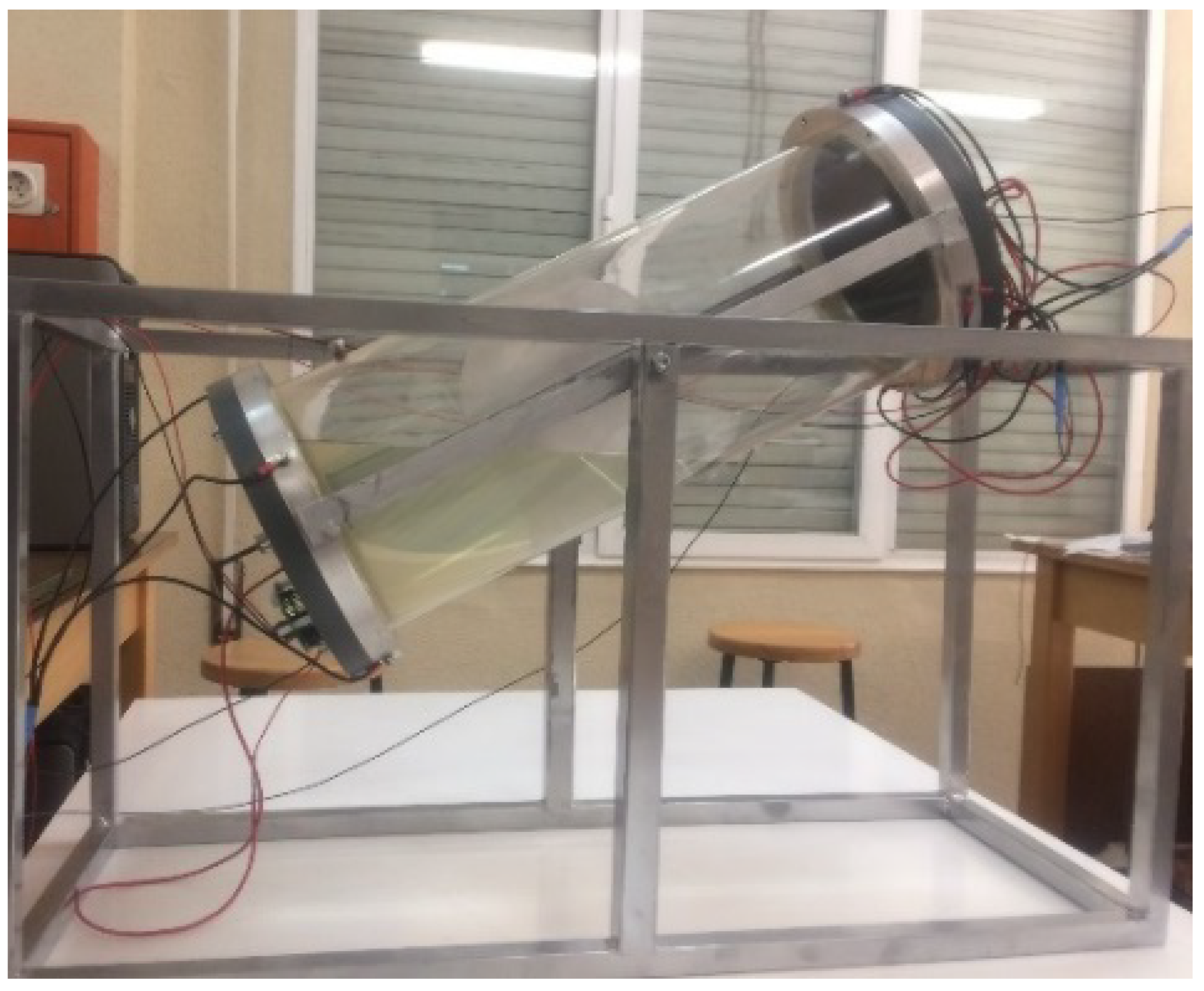
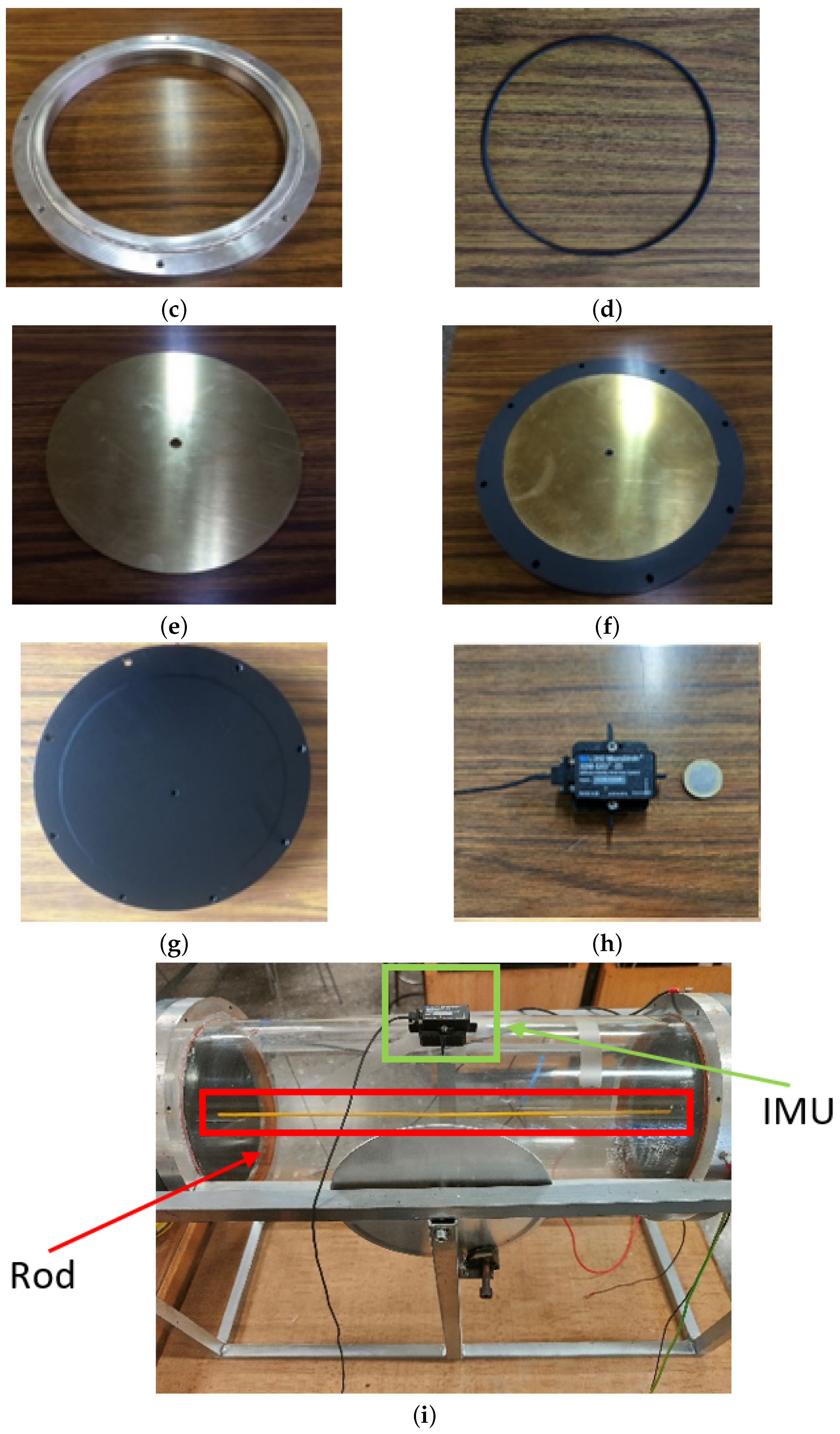
4. Description of the Experimental Setup
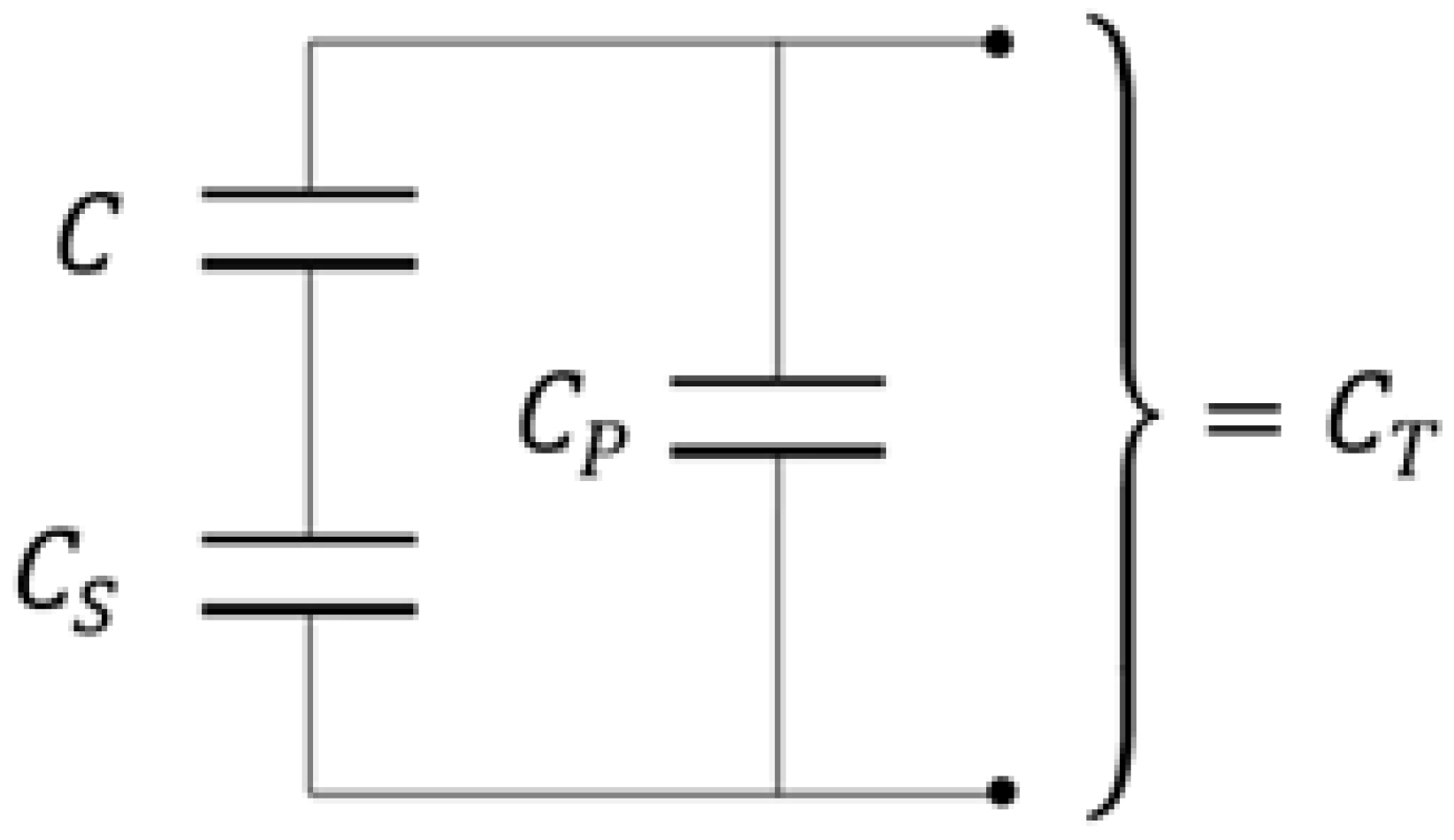
4.1. Capacitive Measurement
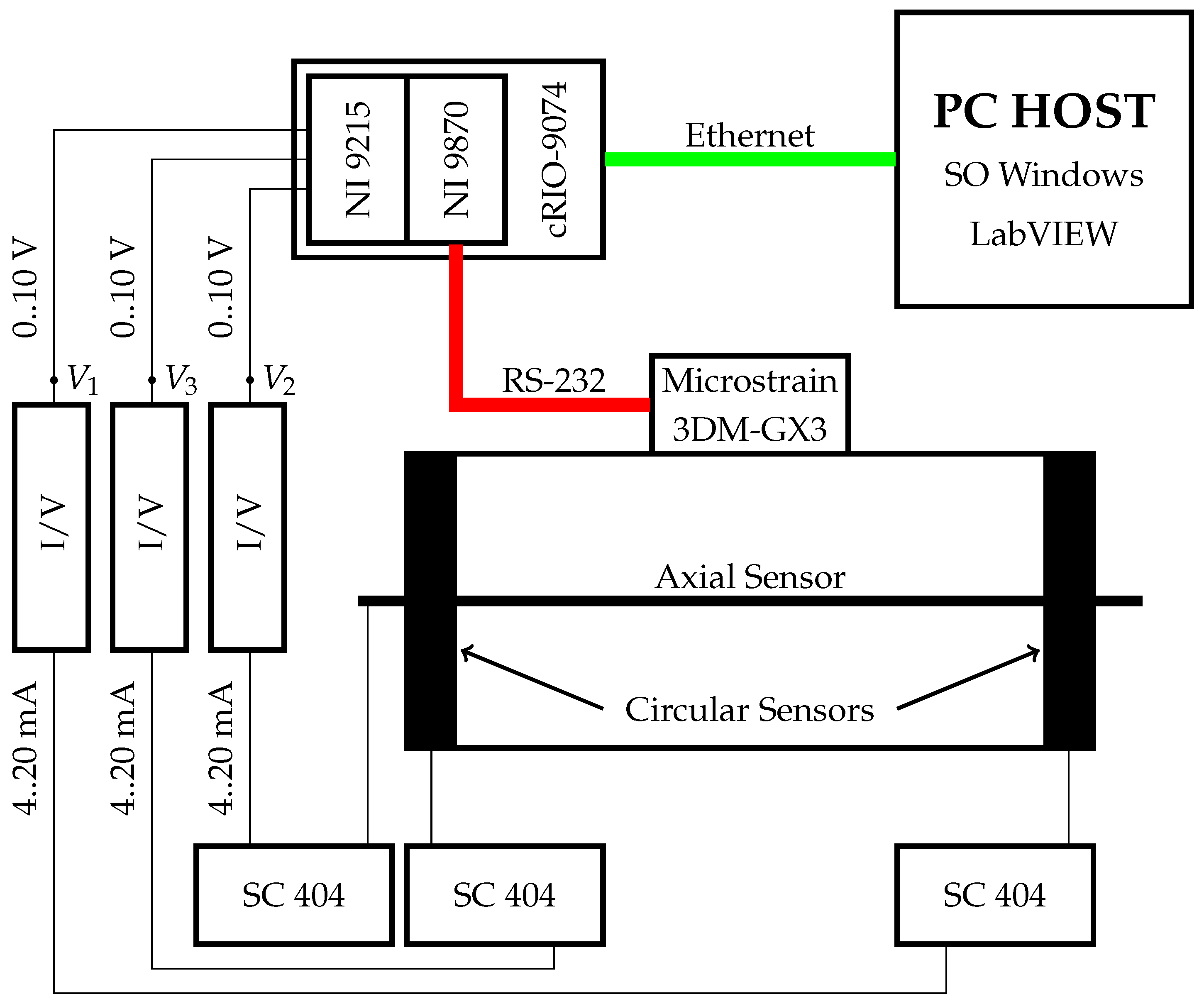
4.2. Architecture of Instrumentation
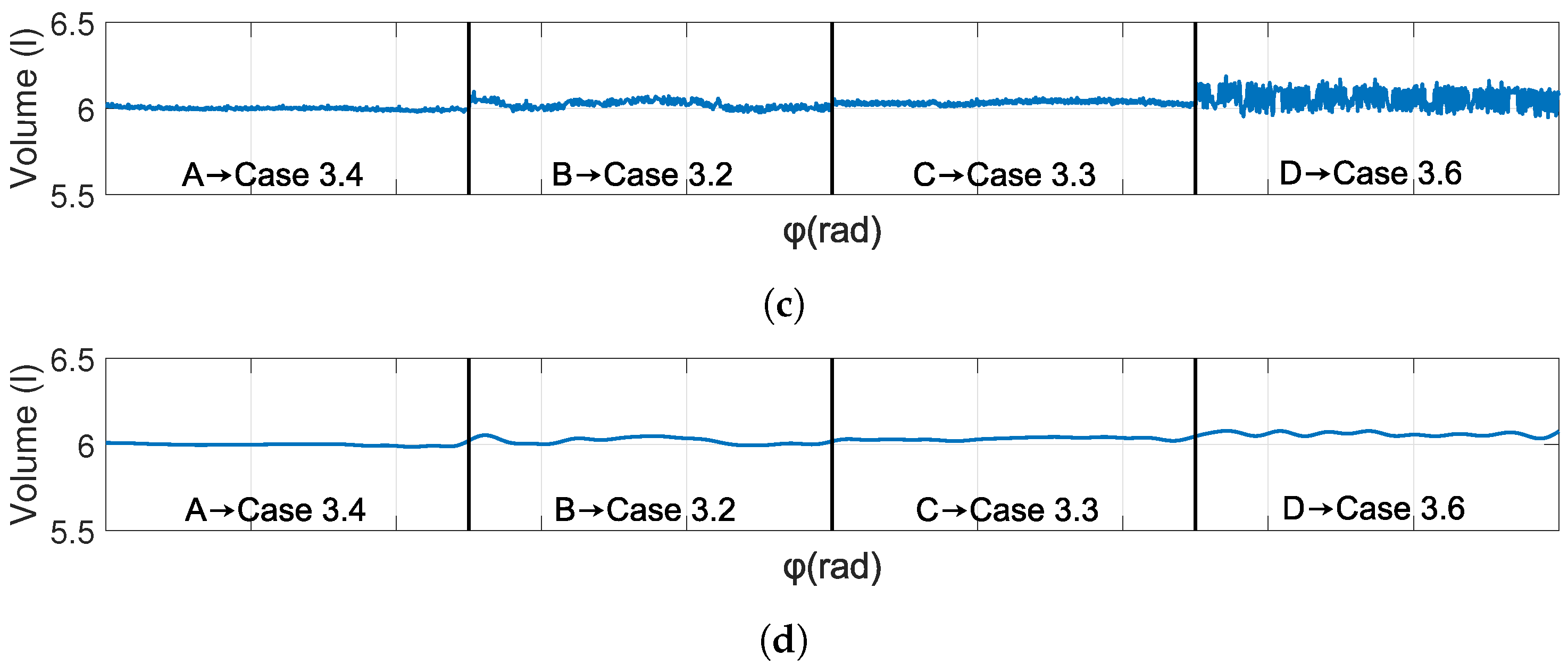
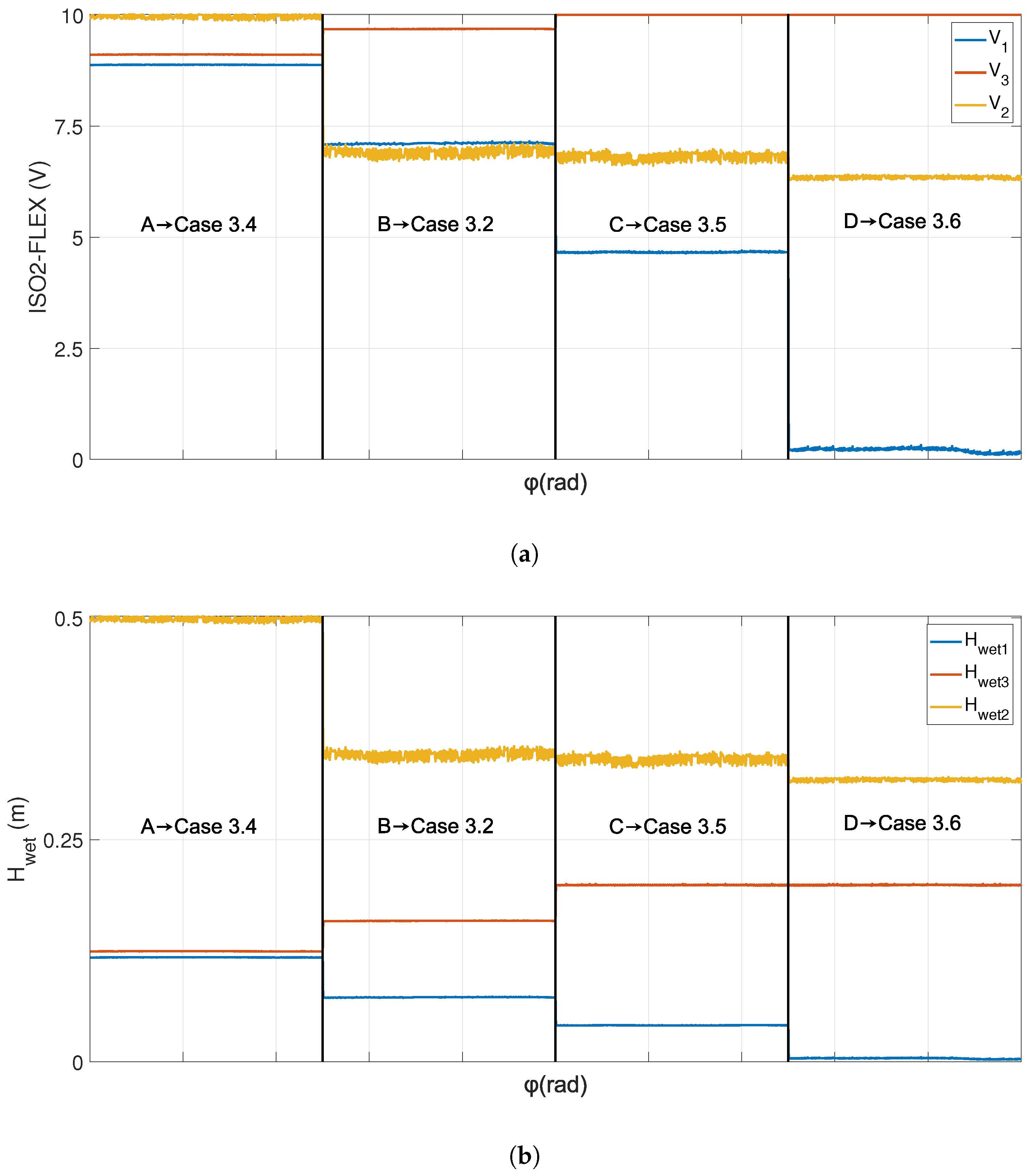
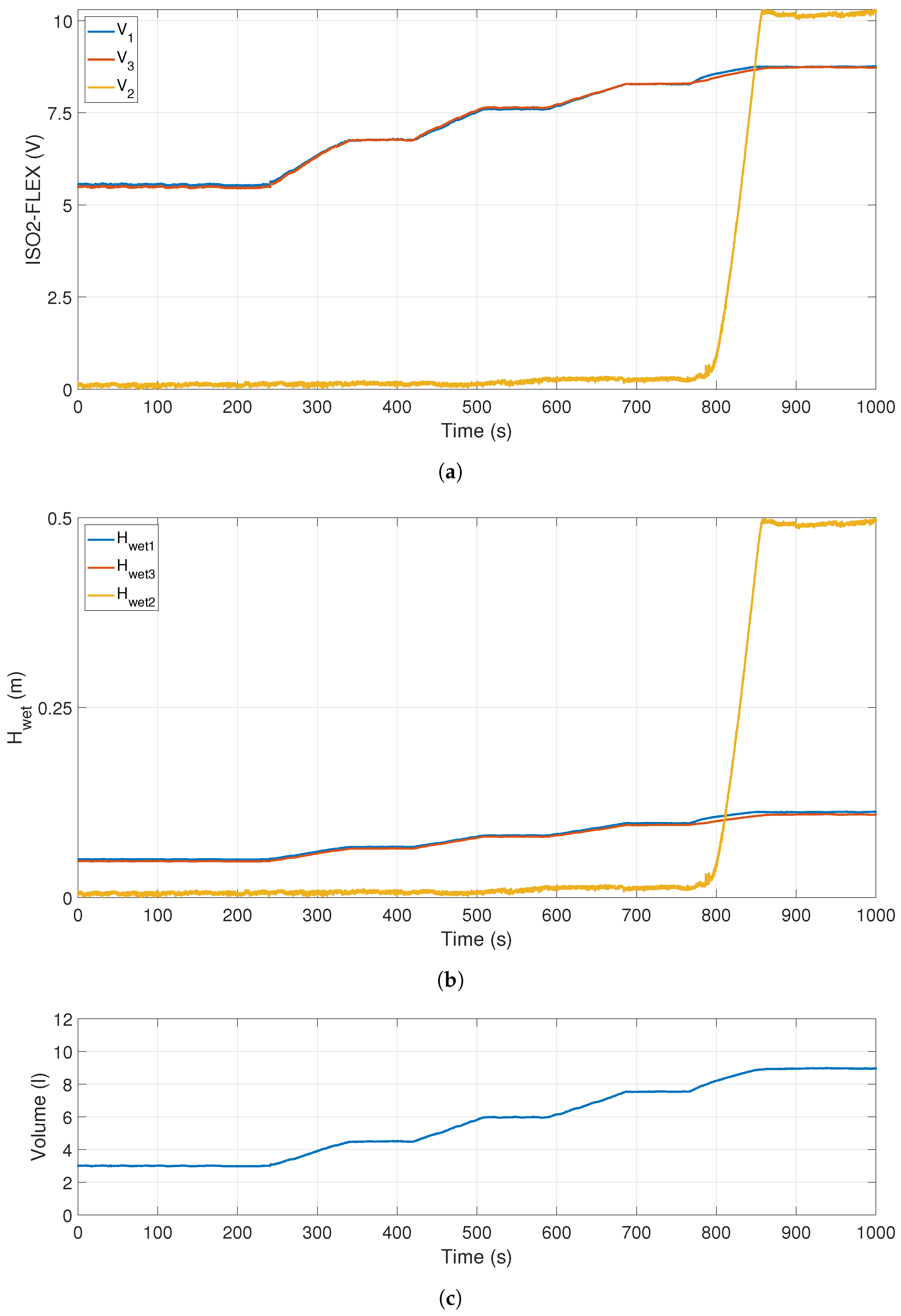
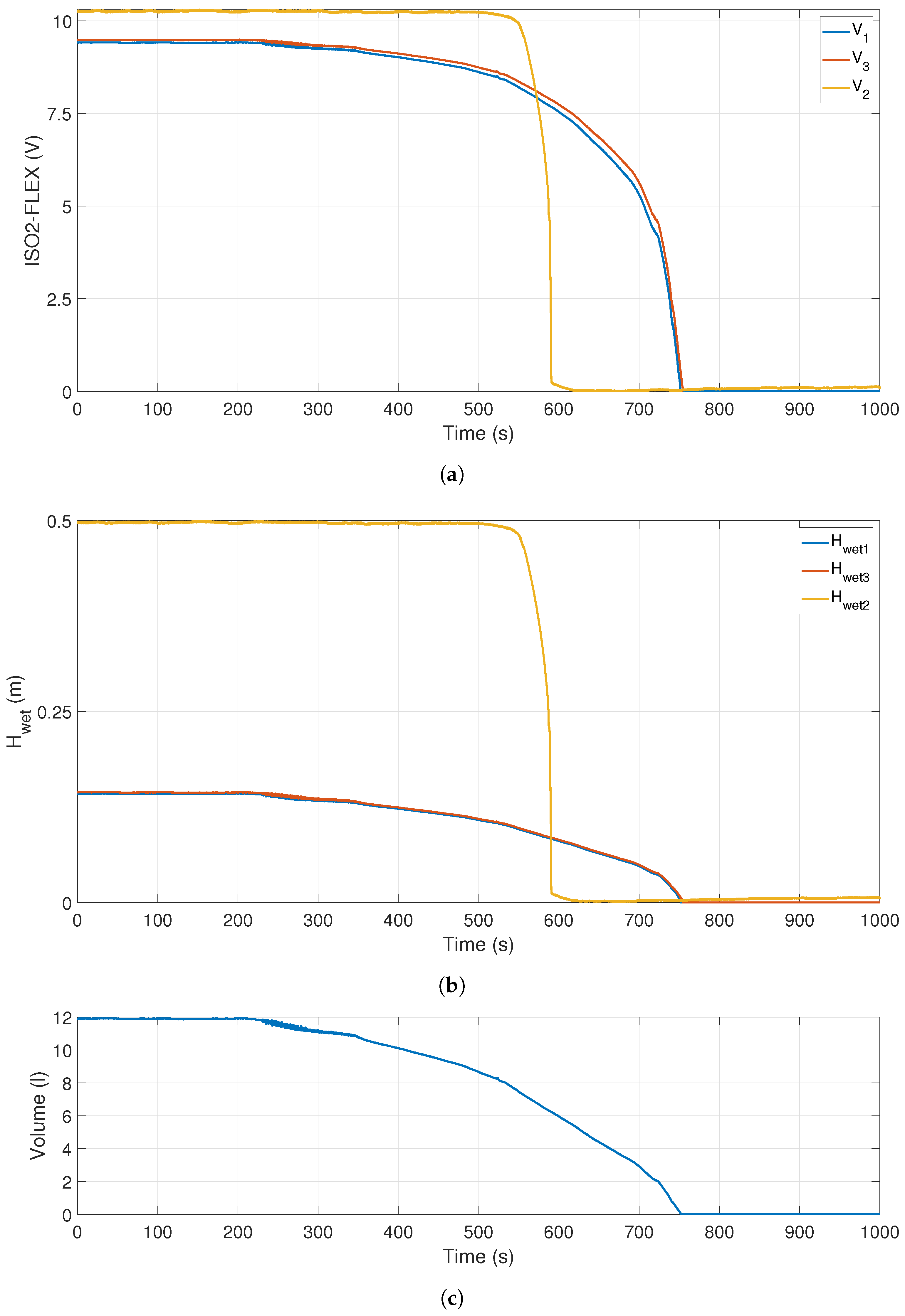
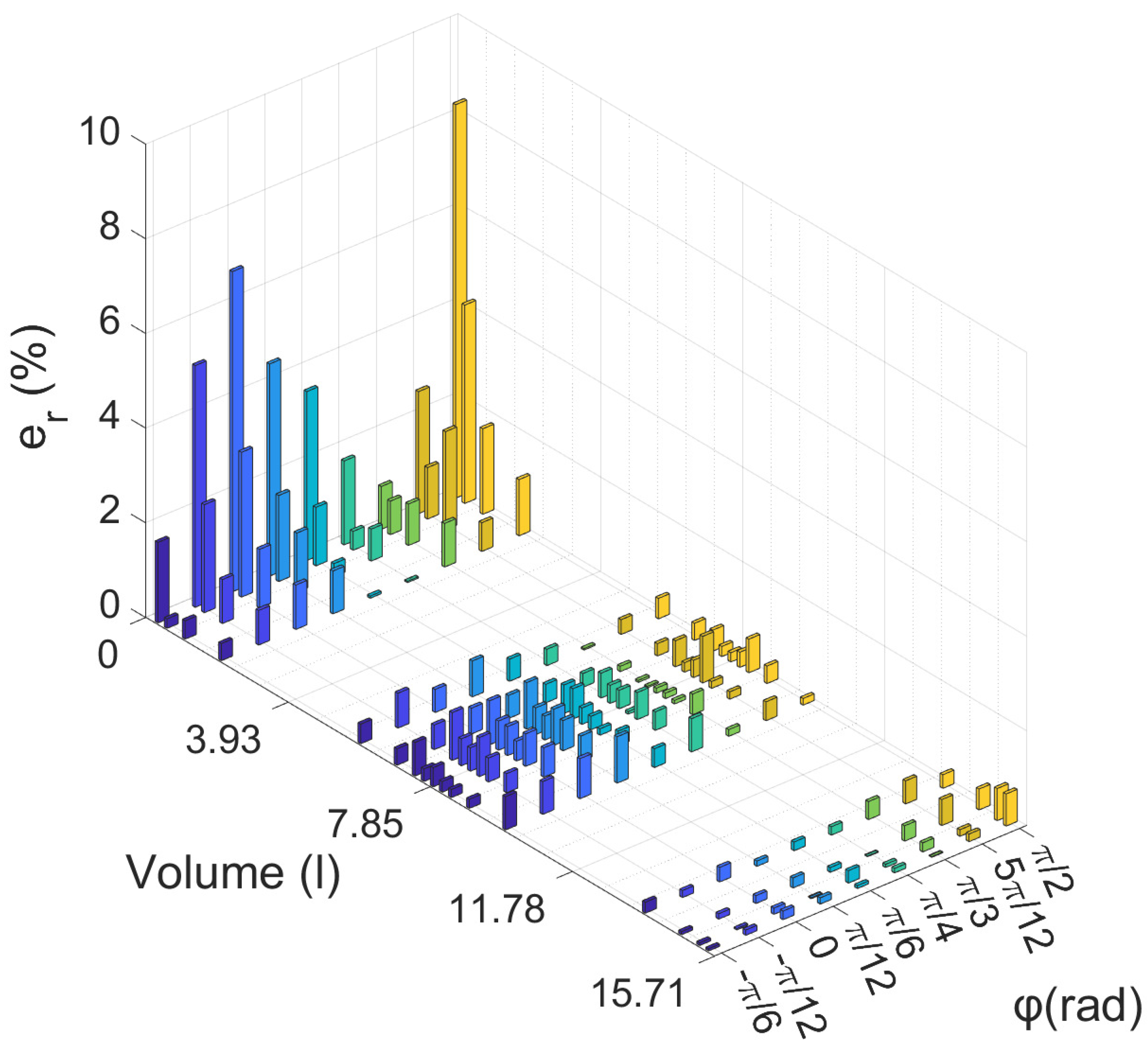
5. Experimental Results
Relative Errors
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| TEC | Tidal Energy Converter |
| AUV | Autonomous Underwater Vehicles |
References
- Bovio, E.; Cecchi, D.; Baralli, F. Autonomous underwater vehicles for scientific and naval operations. Annu. Rev. Control. 2006, 30, 117–130. [Google Scholar] [CrossRef]
- Grob, H.W. Sea trials on the new US Navy submarine rescue system. In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007. [Google Scholar] [CrossRef]
- Balasuriya, A.; Ura, T. Vision-based underwater cable detection and following using AUVs. In Proceedings of the OCEANS ’02 MTS/IEEE, Biloxi, MI, USA, 29–31 October 2002. [Google Scholar] [CrossRef]
- Toro, N.; Robles, P.; Jeldres, R.I. Seabed mineral resources, an alternative for the future of renewable energy: A critical review. Ore Geol. Rev. 2020, 126, 103699. [Google Scholar] [CrossRef]
- del Horno, L.; Somolinos, J.A.; Segura, E.; Morales, R. A New Proposal for the Closed-Loop Orientation Control of a Windfloat Turbine System. J. Mar. Sci. Eng. 2020, 9, 26. [Google Scholar] [CrossRef]
- Antonutti, R.; Peyrard, C.; Johanning, L.; Incecik, A.; Ingram, D. The effects of wind-induced inclination on the dynamics of semi-submersible floating wind turbines in the time domain. Renew. Energy 2016, 88, 83–94. [Google Scholar] [CrossRef]
- Tangirala, S.; Dzielski, J. A variable buoyancy control system for a large AUV. IEEE J. Ocean. Eng. 2007, 32, 762–771. [Google Scholar] [CrossRef]
- Woods, S.A.; Bauer, R.J.; Seto, M.L. Automated ballast tank control system for autonomous underwater vehicles. IEEE J. Ocean. Eng. 2012, 37, 727–739. [Google Scholar] [CrossRef]
- Morales, R.; Fernández, L.; Segura, E.; Somolinos, J.A. Maintenance maneuver automation for an adapted cyclindrical shape TEC. Energies 2016, 9, 746. [Google Scholar] [CrossRef]
- Somolinos, J.A.; López, A.; Núñez, L.R.; Morales, R. Dynamic model and experimental validation for the control of emersion manoeuvers of devices for marine currents harnessing. Renew. Energy 2017, 103, 333–345. [Google Scholar] [CrossRef]
- del Horno, L.; Somolinos, J.A.; Segura, E.; Morales, R. Exhaustive closed loop behavior of an one degree of freedom first-generation device for harnessing energy from marine currents. Appl. Energy 2020, 276, 115457. [Google Scholar] [CrossRef]
- Segura, E.; Morales, R.; Somolinos, J.A. Cost Assessment Methodology and Economic Viability of Tidal Energy Projects. Energies 2017, 10, 1806. [Google Scholar] [CrossRef]
- Segura, E.; Morales, R.; Somolinos, J.A.; López, A. Techno-economic challenges of tidal energy conversion systems: Current status and trends. Renew. Sustain. Energy Rev. 2017, 77, 536–550. [Google Scholar] [CrossRef]
- Segura, E.; Morales, R.; Somolinos, J.A. Influence of Automated Maneuvers on the Economic Feasibility of Tidal Energy Farms. Sustainability 2019, 11, 5965. [Google Scholar] [CrossRef]
- Segura, E.; Morales, R.; Somolinos, J.A. Economic-financial modeling for marine current harnessing projects. Energy 2018, 158, 859–880. [Google Scholar] [CrossRef]
- Segura, E.; Morales, R.; Somolinos, J.A. Increasing the Competitiveness of Tidal Systems by Means of the Improvement of Installation and Maintenance Maneuvers in First Generation Tidal Energy Converters—An Economic Argumentation. Energies 2019, 12, 2464. [Google Scholar] [CrossRef]
- Portilla, M.P.; López, A.; Somolinos, J.A.; Morales, R. Modelado dinámico y control de un dispositivo sumergido provisto de actuadores hidrostáticos. Rev. Iberoam. Automática Informática Ind. 2018, 15, 12–23. [Google Scholar] [CrossRef]
- Nursabillilah, M.A.; Tee, L.Y.; Jian, K.H.; Wai, P.T.; Fang, L.S.; Hasan, Z.; Ab Rashid, M.Z.; Razali, S. The limitations of present sensor technologies in the automotive industry: A review. J. Telecommun. Electron. Comput. Eng. 2018, 10, 129–134. [Google Scholar]
- Cunjun, L.; Huadong, H.; Haolei, S.; Xianlei, C.; Zenan, W.; Junxue, C.; Tao, L. Research on measurement method of ship’s liquid cargo tank capacity based on real-scene replication technology. In Proceedings of the 14th IEEE International Conference on Electronic Measurement and Instruments (ICEMI), Changsha, China, 1–3 November 2019. [Google Scholar] [CrossRef]
- Zheng, H. New level sensor system for ship stability analysis and monitor. IEEE Trans. Instrum. Meas. 1999, 48, 1014–1017. [Google Scholar] [CrossRef]
- Pardo, M.; Manotas, V.; Campanella, H.; Páez, J. Método de medición de combustible en una embarcación fluvial. Ing. Cienc. 2006, 2, 5–27. [Google Scholar]
- Loizou, K.; Koutroulis, E. Water level sensing: State of the art review and performance evaluation of a low-cost measurement system. Meas. J. Int. Meas. Confed. 2016, 89, 204–214. [Google Scholar] [CrossRef]
- Praveen, K.; Rajniganth, M.P.; Arun, A.D.; Sahoo, P.; Murali, N. Continuous-type liquid Level Measurement System using pulsating sensor. In Proceedings of the 2015 International Conference on Industrial Instrumentation and Control (ICIC), Pune, India, 28–30 May 2015. [Google Scholar] [CrossRef]
- Hanni, J.R.; Venkata, S.K. Does the existing liquid level measurement system cater the requirement of future generation? Measurement 2020, 156, 107594. [Google Scholar] [CrossRef]
- Sydenham, P.H.; Boyes, W.H. Measurement of Level and Volume. In Instrumentation Reference Book, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Mohindru, P. Development of liquid level measurement technology: A review. Flow Meas. Instrum. 2023, 89, 102295. [Google Scholar] [CrossRef]
- Liptak, G. Process Measurement and Analysis. In Instrument Engineers’ Handbook; CRC Press: Boca Raton, FL, USA, 2003; Volume 1. [Google Scholar]
- Atalay, O.; Belli, B.; Sezgin, O. Improving level measurement techniques and measurement accuracy in vehicle fuel tanks. Int. J. Automot. Eng. Technol. 2022, 11, 110–116. [Google Scholar] [CrossRef]
- Arias, J.A.; Marulanda, A. Control y Medida de Nivel de Líquido por Medio de un Sensor de Presión Diferencial. Ph.D. Thesis, Facultad de Tecnologia, Universidad Tecnologica de Pereira, Pereira, Colombia, 2010. [Google Scholar]
- Joshi, P.C.; Chopadey, N.B.; Chhibber, B. Liquid Level Sensing and Control Using Inductive Pressure Sensor. In Proceedings of the International Conference on Computing, Communication, Control and Automation, ICCUBEA, Pune, India, 17–18 August 2017. [Google Scholar] [CrossRef]
- Zou, D.; Yang, M.; Zhan, X.; He, R.; Li, X. Assessment of air entrainment in stirred tanks using capacitive sensors. Sens. Actuators A Phys. 2014, 216, 92–101. [Google Scholar] [CrossRef]
- Tural, K. Development of Ultrasonic Measuring Device (Sensors) that Determine the Level of Liquid in Tanks. Master’s Thesis, Khazar University, Baku, Azerbaijan, 2022. [Google Scholar]
- Wu, Z.; Huang, Y.; Huang, K.; Yan, K.; Chen, H. A Review of Non-Contact Water Level Measurement Based on Computer Vision and Radar Technology. Water 2023, 15, 3233. [Google Scholar] [CrossRef]
- Bera, S.C.; Ray, J.K.; Chattopadhyay, S. A low-cost noncontact capacitance-type level transducer for a conducting liquid. IEEE Trans. Instrum. Meas. 2006, 55, 778–786. [Google Scholar] [CrossRef]
- Nikhil, B.S.; Roopa, J.; Harigovind, A.; Bharadwaj, A. A Review on Capacitive Liquid Level Sensing Techniques. J. Univ. Shanghai Sci. Technol. 2021, 23, 654–662. [Google Scholar] [CrossRef]
- Bardiya, S.; Vasuki, B. Performance analysis of capacitance-type liquid level measurement at inclined positions. In Proceedings of the International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kannur, India, 6–7 July 2017. [Google Scholar] [CrossRef]
- Lu, G.; Chen, S. A capacitive liquid level sensor with four electrodes. In Proceedings of the 2010 3rd IEEE International Conference on Computer Science and Information Technology (ICCSIT), Chengdu, China, 9–11 July 2010. [Google Scholar] [CrossRef]
- Lu, G.; He, Q.; Zhu, Z.; Chen, J. A new proposal of multi-functional liquid level meter. In Proceedings of the 2011, International Conference on Informatics, Cybernetics, and Computer Engineering (ICCE2011), Melbourne, Australia, 19–20 November 2011; Information Systems and Computer Engineering. Volume 2, pp. 31–39. [Google Scholar] [CrossRef]
- del Horno, L.; Somolinos, J.A.; Segura, E.; Morales, R. Estudio comparativo de algoritmos de control para maniobras de DAECs de primera generación y dos grados de libertad. Rev. Iberoam. Automática Informática Ind. 2021, 18, 407–418. [Google Scholar] [CrossRef]
- Portilla, M.P.; Somolinos, J.A.; López, A.; Morales, R.; Segura, E. Automatización de maniobras para un TEC de 2GdL. In Proceedings of the XXXVIII Jornadas de Automatica, Gijon, Spain, 6–8 September 2020. [Google Scholar] [CrossRef]
- Somolinos, J.A.; López, A.; Portilla, M.P.; Morales, R. Dynamic Model and Control of a New Underwater Three-Degree-of-Freedom Tidal Energy Converter. Math. Probl. Eng. 2015, 2015, 948048. [Google Scholar] [CrossRef]
- Shape the World We Live in|CATIA—Dassault Systèmes. Available online: https://www.3ds.com/es/productos-y-servicios/catia (accessed on 21 October 2023).
- Castro, E.J.; Nataniel, E.; Araya, F.J.; Alvarenga, J.A.; Hernández, M.A.; Castillo, M.; Molina, H.; Granados, C.A. Figuras De Lissajous; UCA-CEF-Laboratorio de Física II: USA, 2013; 4p. [Google Scholar]
- User’s Guide: Installation, Operation, Maintenance Instructions. Sitron SC-404. Available online: https://www.controlcomponents.com.au/Open-File/371/SC404%20-%20manual%20%282014%29.pdf (accessed on 23 September 2023).
- User Manual and Especifications. Aislador Universal V-I ISO2-FLEX. Available online: https://dpfsensors.es/wp-content/uploads/2020/04/ISO2-Plus.pdf (accessed on 23 September 2023).
- NI-9215. Getting Started. Available online: https://www.ni.com/docs/en-US/bundle/ni-9215-getting-started/page/overview.html (accessed on 26 September 2023).
- MicroStrain Quick Start Guide 3DM-GX3. Available online: https://files.microstrain.com/3DM-GX3%20Soft%20&%20Hard%20Iron%20Calibration%20Quick%20Start%20Guide.pdf (accessed on 26 September 2023).
- RS-232 Serial Module NI 9871. Getting Started. Available online: https://www.ni.com/docs/en-US/bundle/ni-9871-getting-started/page/overview.html (accessed on 23 September 2023).
- Traco Power TEN 5-2412. Available online: https://www.tracopower.com/int/es/series/ten-5 (accessed on 26 September 2023).
- User manual and especifications NI cRIO-9074XT Reconfigurable. Available online: https://www.ni.com/docs/en-US/bundle/crio-9072-9073-9074-seri/resource/374639f.pdf (accessed on 23 September 2023).
- LabVIEW. Available online: https://www.ni.com/es-es/shop/labview.html (accessed on 13 October 2023).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Redundant Measurement | |||
|---|---|---|---|---|
| Section 3.2 | 0 | |||
| Section 3.2 | ||||
| Section 3.2 | L | |||
| Section 3.3 | 0 | |||
| Section 3.5 | ||||
| Case | Redundant Measurement | |||
|---|---|---|---|---|
| Section 3.4 | 0 | |||
| Section 3.4 | L |
| Circular Sensor Capacitance 1 | Completely Dry | nF |
| Completely Wet | nF | |
| Circular Sensor Capacitance 2 | Completely Dry | nF |
| Completely Wet | nF | |
| Circular Sensor Capacitance 3 | Completely Dry | nF |
| Completely Wet | nF |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
del Horno, L.; Segura, E.; Somolinos, J.A.; Morales, R. A New Methodology-Based Sensorial System with Which to Determine the Volume of Liquid Contained in a Cylindrical Tank Subjected to Full Variations in Its Orientation. J. Mar. Sci. Eng. 2023, 11, 2316. https://doi.org/10.3390/jmse11122316
del Horno L, Segura E, Somolinos JA, Morales R. A New Methodology-Based Sensorial System with Which to Determine the Volume of Liquid Contained in a Cylindrical Tank Subjected to Full Variations in Its Orientation. Journal of Marine Science and Engineering. 2023; 11(12):2316. https://doi.org/10.3390/jmse11122316
Chicago/Turabian Styledel Horno, Leticia, Eva Segura, José A. Somolinos, and Rafael Morales. 2023. "A New Methodology-Based Sensorial System with Which to Determine the Volume of Liquid Contained in a Cylindrical Tank Subjected to Full Variations in Its Orientation" Journal of Marine Science and Engineering 11, no. 12: 2316. https://doi.org/10.3390/jmse11122316
APA Styledel Horno, L., Segura, E., Somolinos, J. A., & Morales, R. (2023). A New Methodology-Based Sensorial System with Which to Determine the Volume of Liquid Contained in a Cylindrical Tank Subjected to Full Variations in Its Orientation. Journal of Marine Science and Engineering, 11(12), 2316. https://doi.org/10.3390/jmse11122316