
Model Predictive Control Based on State Space and Risk Augmentation for Unmanned Surface Vessel Trajectory Tracking

Abstract
:1. Introduction
- (1)
- It establishes a state space control model with risk augmentation for underactuated USV path tracking, where the state space control model, including track error deviation, heading angle deviation, heading angle velocity, and risk force augmentation term, plays an important role.
- (2)
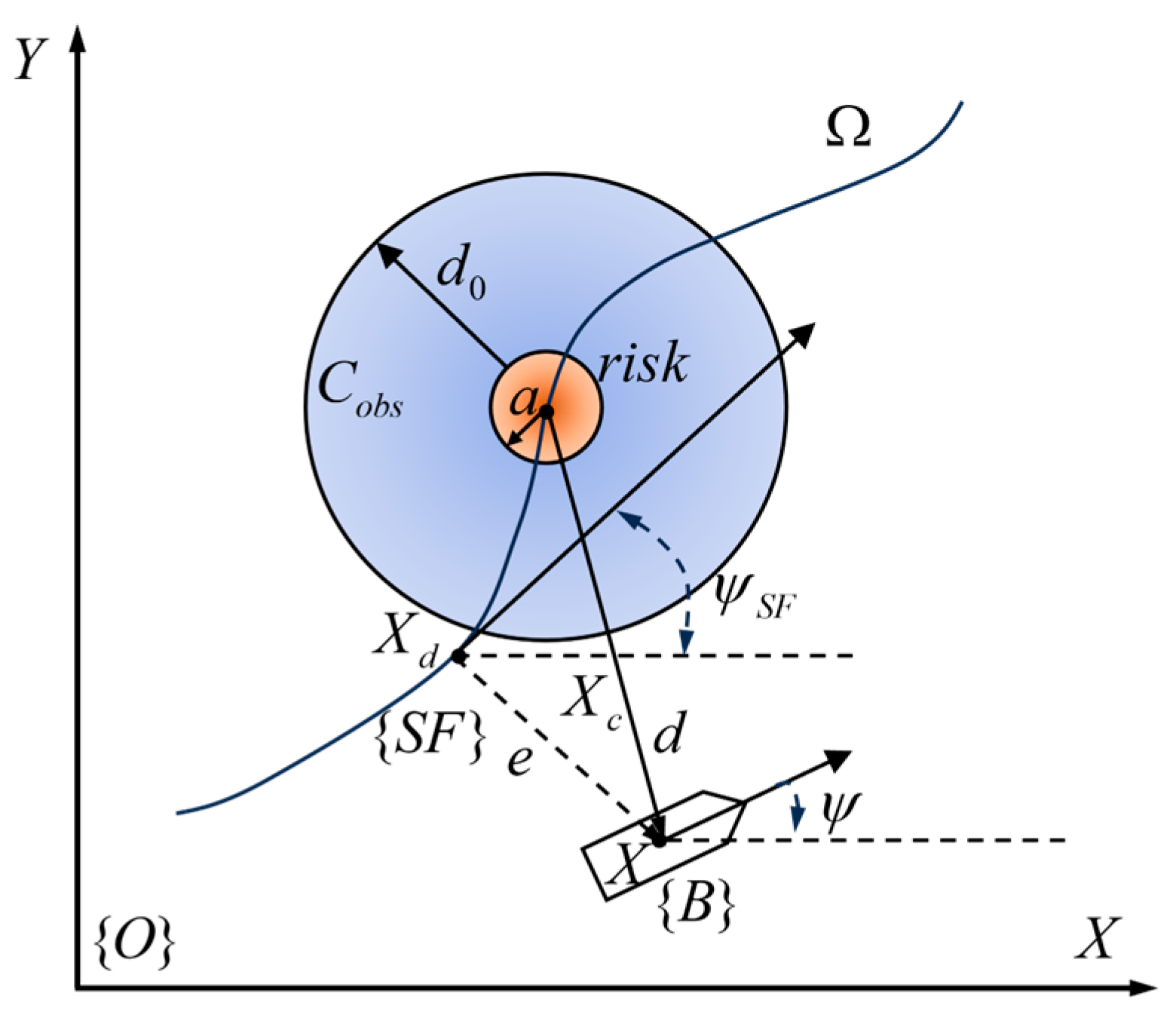
- This paper presents a MPC method combined with an artificial potential field that accounts for multiple environmental obstacles, in which the risk model depicting the correlation between the USV and obstacles has been established based on the Serret–Frenet coordinate system, distinguishing itself from existing techniques.
- (3)
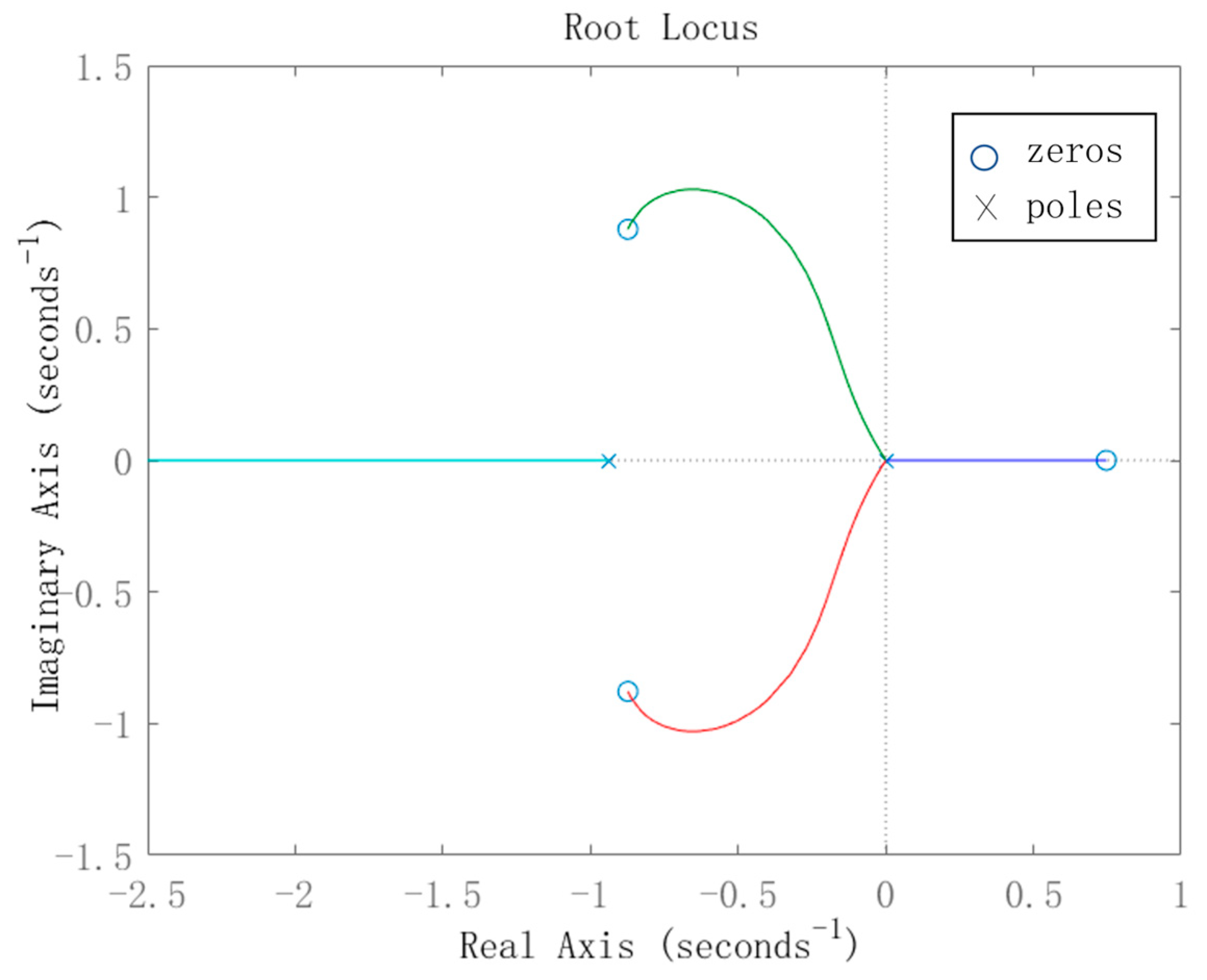
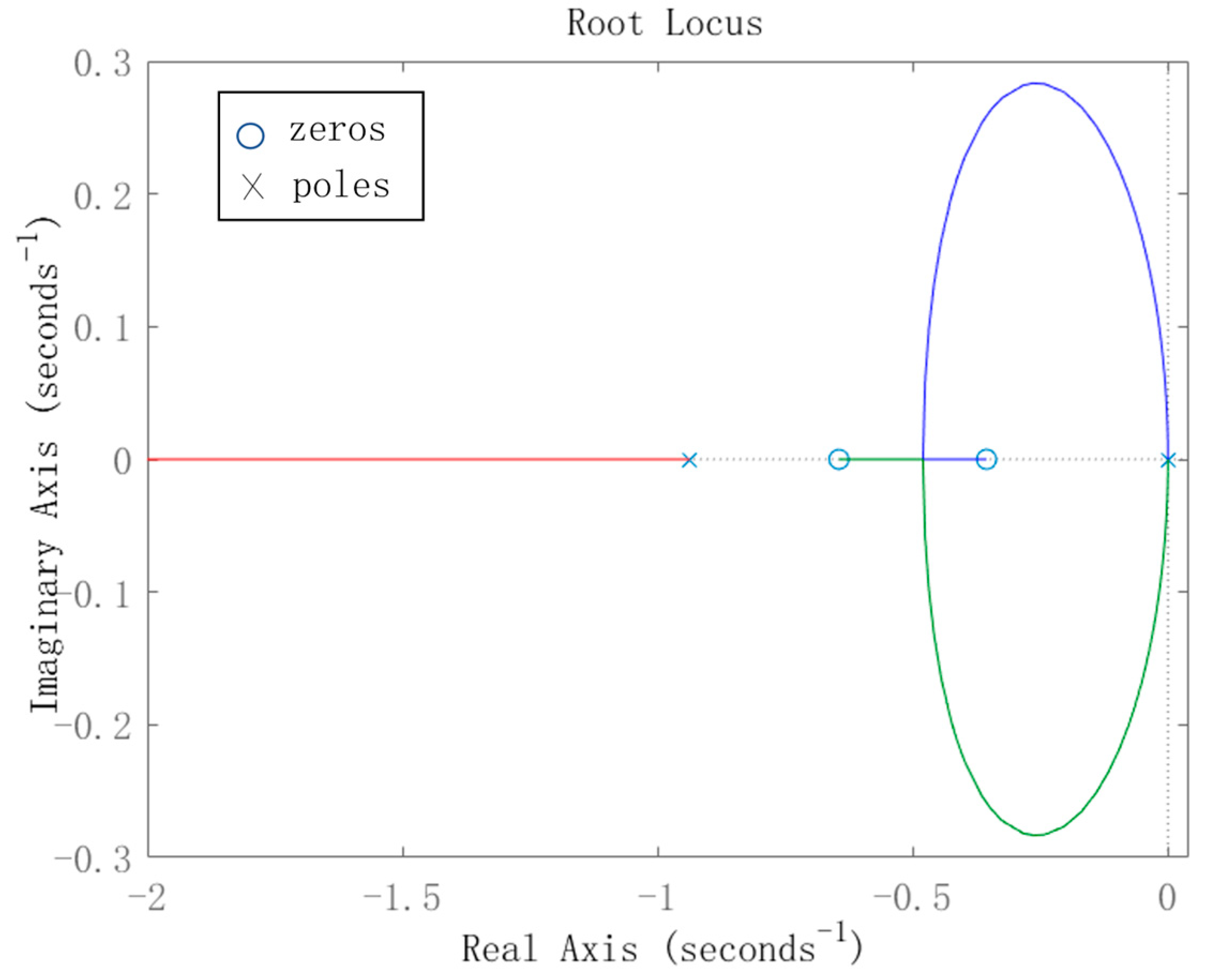
- It demonstrates that a reasonable design of the weighted gain matrix and risk avoidance parameters ensure convergence of the proposed algorithm. The method developed in this work, based on Lyapunov stability and zero-pole analysis, holds significant value in obtaining optimal control action in an explicit manner.
2. System Modeling
2.1. Trajectory Tracking Description of USV
2.2. State Space Model for Trajectory Tracking
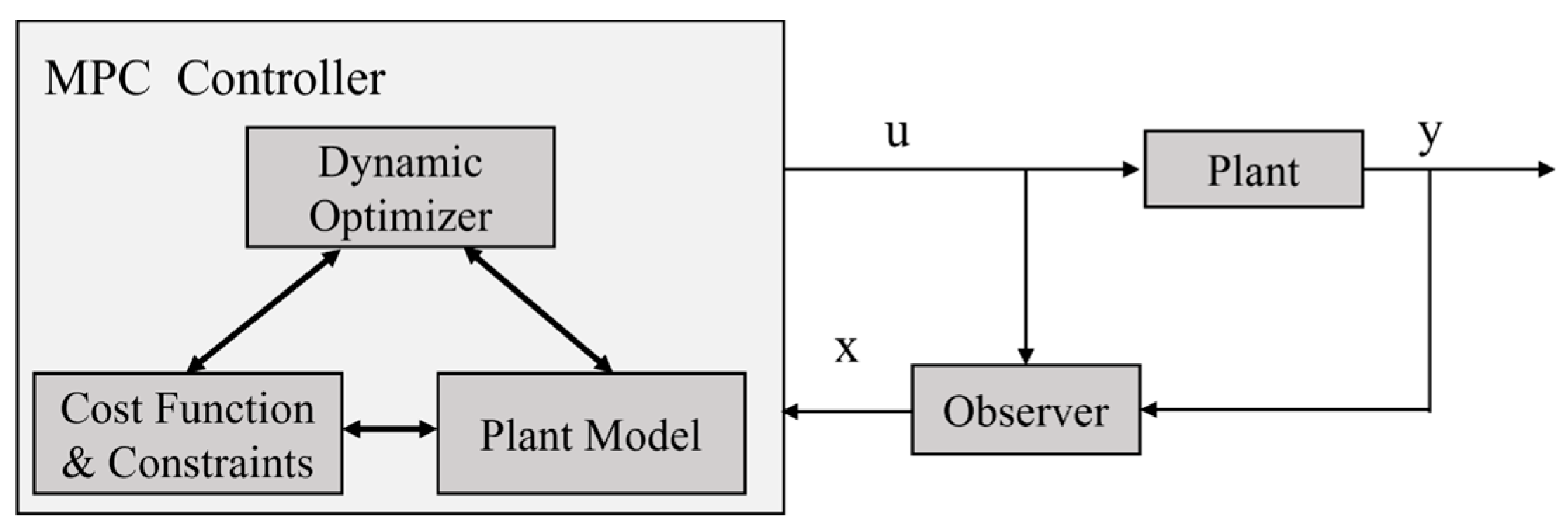
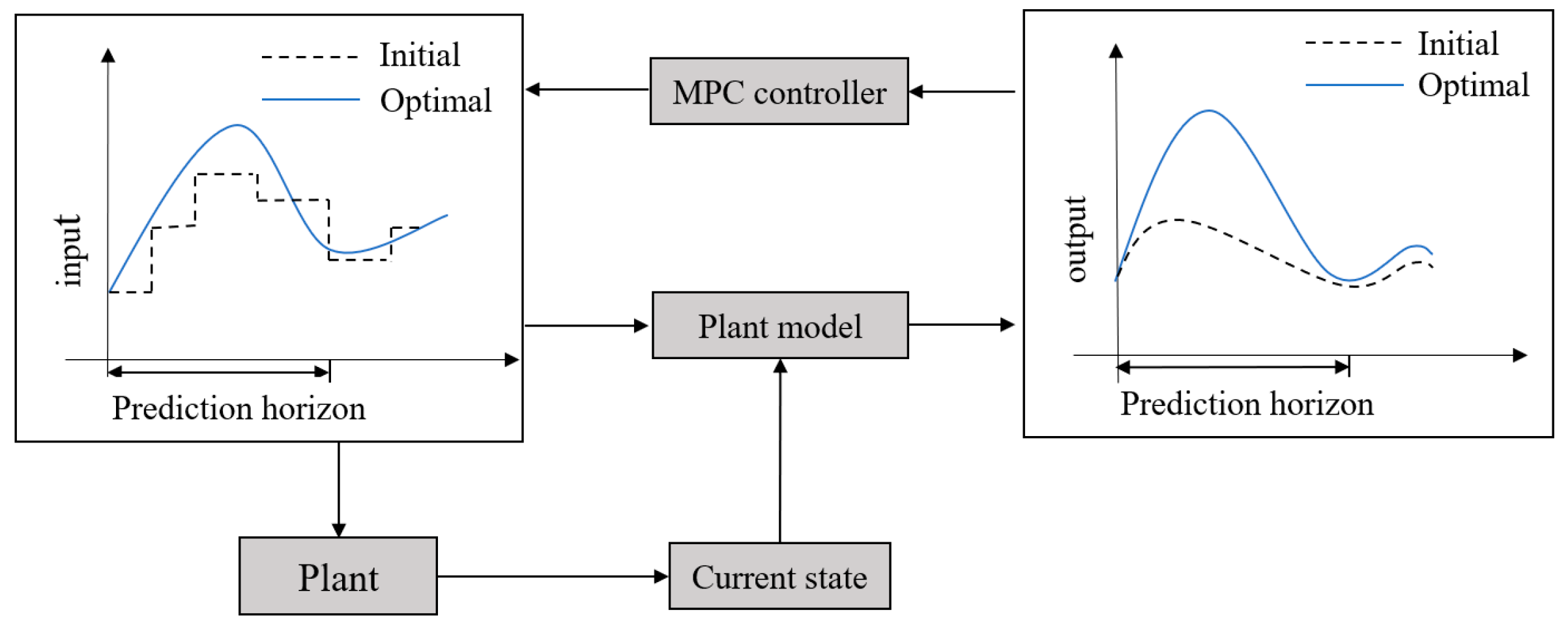
2.3. MPC Algorithm Framework
3. Model Predictive Controller
3.1. Obstacle Description under the SFC for USV Trajectory Tracking
3.2. Controller Design with Risk Augmentation
3.3. Convergence Analysis
4. Simulations
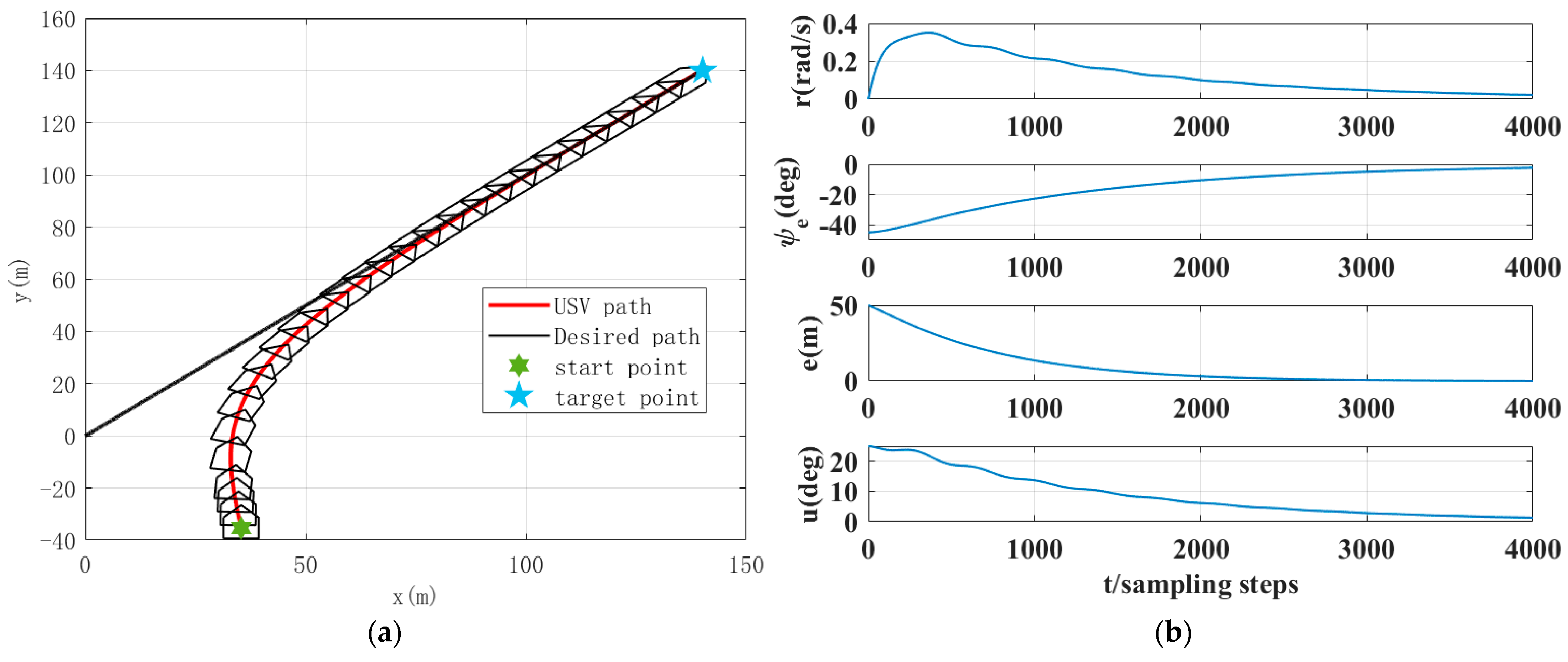
4.1. Scenario 1: Target Point Following
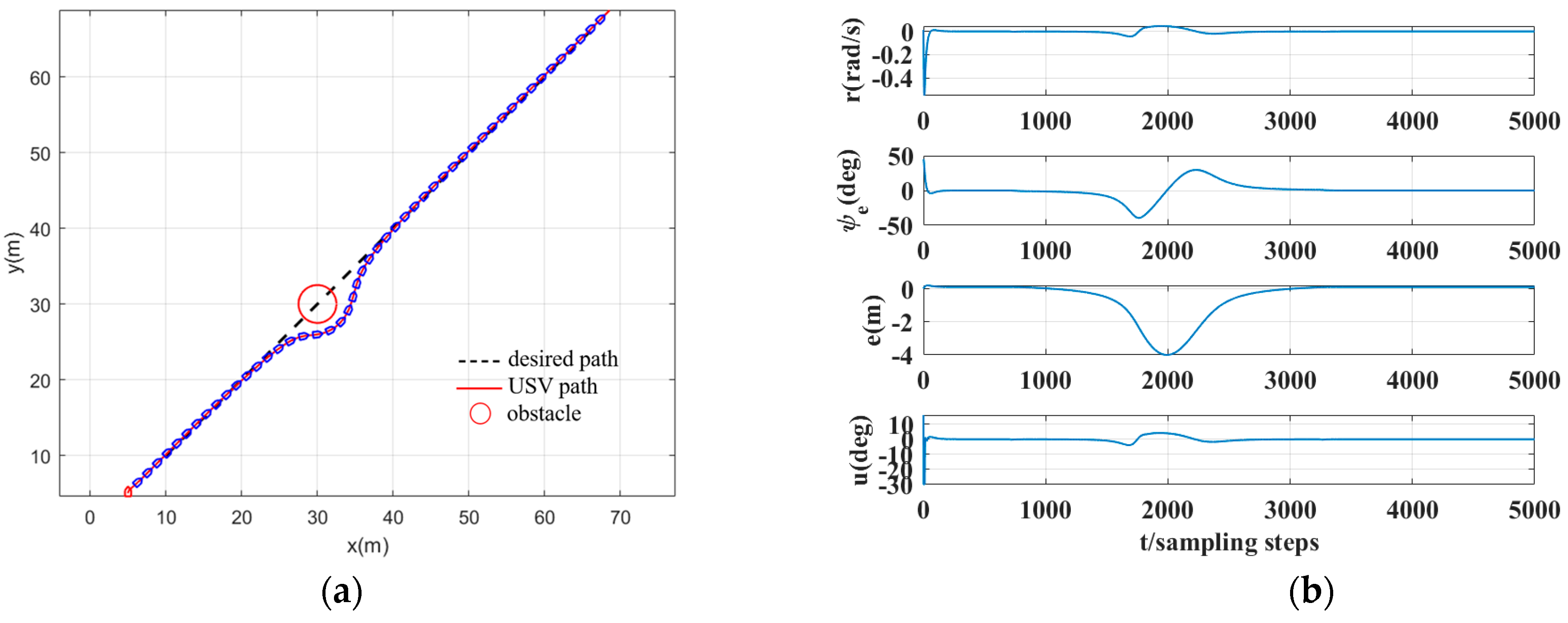
4.2. Scenario 2: Trajectory Tracking with a Single Obstacle
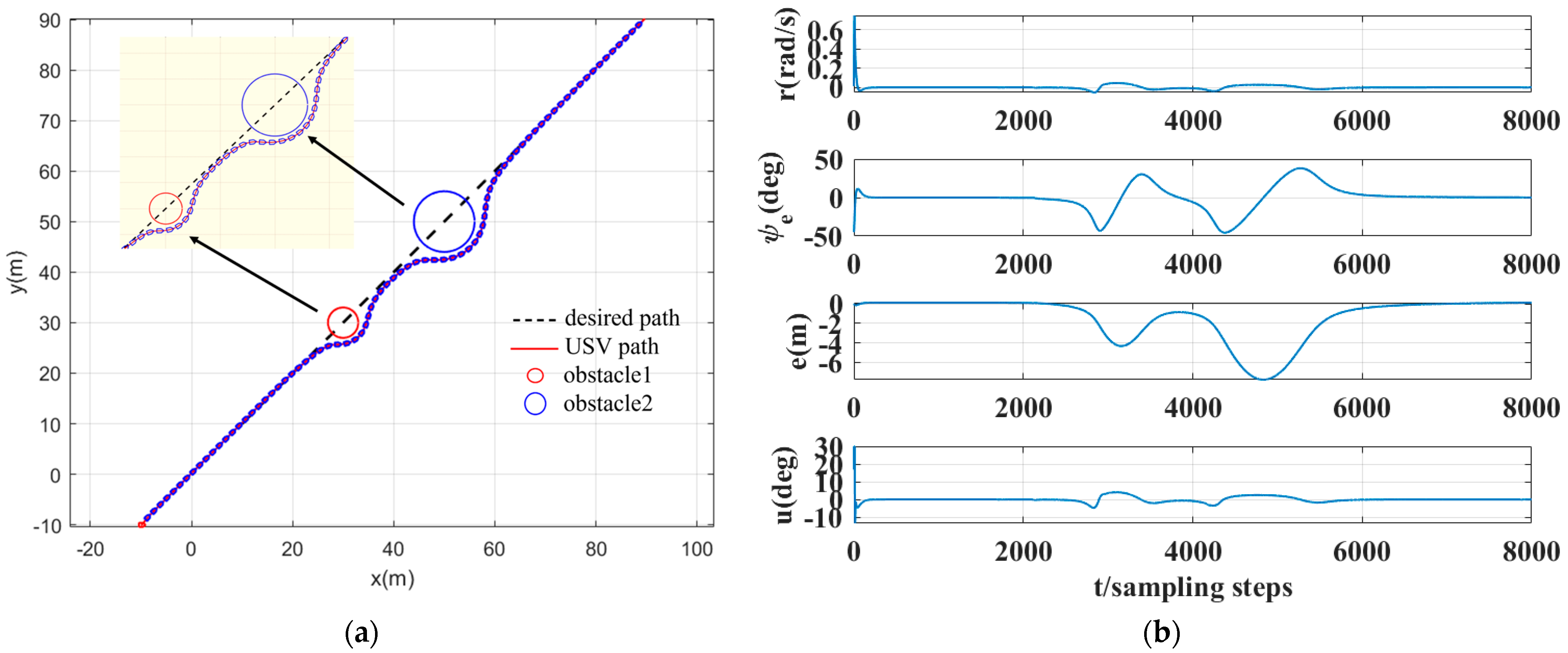
4.3. Scenario 3: Trajectory Tracking with Multiple Obstacles
5. Conclusions
6. Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Luo, M.; Sung, S.H. Half-century research developments in maritime accidents: Future directions. Accid. Anal. Prev. 2019, 123, 448–460. [Google Scholar] [CrossRef]
- Emami, S.A.; Banazadeh, A. Simultaneous trajectory tracking and aerial manipulation using a multi-stage model predictive control. Aerosp. Sci. Technol. 2021, 112, 106573. [Google Scholar] [CrossRef]
- Yuan, X.; Tong, C.; He, G.; Wang, H. Unmanned Vessel Collision Avoidance Algorithm by Dynamic Window Approach Based on COLREGs Considering the Effects of the Wind and Wave. J. Mar. Sci. Eng. 2023, 11, 1831. [Google Scholar] [CrossRef]
- Sonnenburg, C.R.; Woolsey, C.A. Modeling, Identification, and Control of an Unmanned Surface Vehicle. J. Field Robot 2013, 30, 371–398. [Google Scholar] [CrossRef]
- Alcala, E.; Puig, V.; Quevedo, J.; Escobet, T.; Comasolivas, R. Autonomous vehicle control using a kinematic Lyapunov-based technique with LQR-LMI tuning. Control Eng. Pract. 2018, 73, 1–12. [Google Scholar] [CrossRef]
- Maalouf, D.; Chemori, A.; Creuze, V. L1 adaptive depth and pitch control of an underwater vehicle with real-time experiments. Ocean Eng. 2015, 98, 66–77. [Google Scholar] [CrossRef]
- Kim, D.; Choi, H.S.; Kim, J.Y.; Park, J.H.; Tran, N.H. Trajectory generation and sliding-mode controller design of an underwater vehicle manipulator system with redundancy. Int. J. Precis. Eng. Man. 2015, 16, 1561–1570. [Google Scholar] [CrossRef]
- Xiang, X.B.; Yu, C.Y.; Lapierre, L.; Zhang, J.L.; Zhang, Q. Survey on Fuzzy-Logic-Based Guidance and Control of Marine Surface Vehicles and Underwater Vehicles. Int. J. Fuzzy Syst. 2018, 20, 572–586. [Google Scholar] [CrossRef]
- Liu, Y.; Bucknall, R.; Zhang, X. The fast-marching method based intelligent navigation of an unmanned surface vehicle. Ocean Eng. 2017, 142, 363–376. [Google Scholar] [CrossRef]
- Huang, Y.; Ding, H.; Zhang, Y.; Wang, H.; Cao, D.; Xu, N.; Hu, C. A motion planning and tracking framework for autonomous vehicles based on artificial potential field elaborated resistance network approach. IEEE Trans. Ind. Electron. 2019, 67, 1376–1386. [Google Scholar] [CrossRef]
- Liao, Y.; Jia, Z.; Zhang, W.; Jia, Q.; Li, Y. Layered berthing method and experiment of unmanned surface vehicle based on multiple constraints analysis. Appl. Ocean Res. 2019, 86, 47–60. [Google Scholar] [CrossRef]
- Wei, L.; Fang, W.; Jie, B.; Han, Z. Model Predictive Control with Disturbance Observer for Unmanned Surface Vessels Path Tracking. In Proceedings of the 8th IEEE International Conference on Advanced Robotics and Mechatronics, Sanya, China, 8–10 July 2023. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, J.; Zhong, M. A sliding mode predictive anti-pitching control for a high-speed multihull. Ocean Eng. 2023, 285, 115466. [Google Scholar] [CrossRef]
- Xu, W.; Zhang, J.; Wen, H. Robust anti-pitching control for high-speed multihull without velocity measurements. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2023, 237, 120–131. [Google Scholar] [CrossRef]
- Woo, J.; Kim, N. Collision avoidance for an unmanned surface vehicle using deep reinforcement learning. Ocean Eng. 2020, 199, 107001. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, X.; Liang, X.; Li, B. A COLREGs-based obstacle avoidance approach for unmanned surface vehicles. Ocean Eng. 2018, 169, 110–124. [Google Scholar] [CrossRef]
- Li, L.; Wu, D.; Huang, Y.; Yuan, Z.-M. A path planning strategy unified with a COLREGS collision avoidance function based on deep reinforcement learning and artificial potential field. Appl. Ocean Res. 2021, 113, 102759. [Google Scholar] [CrossRef]
- Niu, H.; Ji, Z.; Savvaris, A.; Tsourdos, A. Energy efficient path planning for unmanned surface vehicle in spatially-temporally variant environment. Ocean Eng. 2020, 196, 106766. [Google Scholar] [CrossRef]
- Song, A.L.; Su, B.Y.; Dong, C.Z.; Shen, D.W.; Xiang, E.Z.; Mao, F.P. A two-level dynamic obstacle avoidance algorithm for unmanned surface vehicles. Ocean Eng. 2018, 170, 351–360. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; van Gelder, P.H.A.J.M. Ship collision avoidance methods: State-of-the-art. Safety Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Xie, S.; Wu, P.; Liu, H.; Yan, P.; Li, X.; Luo, J.; Li, Q. A novel method of unmanned surface vehicle autonomous cruise. Ind. Robot 2016, 43, 121–130. [Google Scholar] [CrossRef]
- Wu, P.; Xie, S.; Liu, H.; Li, M.; Li, H.; Peng, Y.; Li, X.; Luo, J. Autonomous obstacle avoidance of an unmanned surface vehicle based on cooperative maneuvering. Ind. Robot 2017, 44, 64–74. [Google Scholar] [CrossRef]
- Candeloro, M.; Lekkas, A.M.; Sørensen, A.J. A Voronoi-diagram-based dynamic path-planning system for underactuated marine vessels. Control Eng. Pract. 2017, 61, 41–54. [Google Scholar] [CrossRef]
- Campbell, S.; Abu-Tair, M.; Naeem, W. An automatic COLREGs-compliant obstacle avoidance system for an unmanned surface vehicle. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2014, 228, 108–121. [Google Scholar] [CrossRef]
- Kuwata, Y.; Wolf, M.T.; Zarzhitsky, D.; Huntsberger, T.L. Safe Maritime Autonomous Navigation With COLREGS, Using Velocity Obstacles. IEEE J. Ocean Eng. 2014, 39, 110–119. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Tang, P.; Zhang, R.; Liu, D.; Huang, L.; Liu, G.; Deng, T. Local reactive obstacle avoidance approach for high-speed unmanned surface vehicle. Ocean Eng. 2015, 106, 128–140. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, T.; Liu, Z. Robust model predictive control for path-following of underactuated surface vessels with roll constraints. Ocean Eng. 2017, 143, 125–132. [Google Scholar] [CrossRef]
- Zhang, X.; Liniger, A.; Borrelli, F. Optimization-based collision avoidance. IEEE Trans. Control Syst. Technol. 2020, 29, 972–983. [Google Scholar] [CrossRef]
- Fukushima, H.; Kon, K.; Matsuno, F. Model Predictive Formation Control Using Branch-and-Bound Compatible with Collision Avoidance Problems. IEEE Trans. Robot. 2013, 29, 1308–1317. [Google Scholar] [CrossRef]
- Ji, J.; Khajepour, A.; Melek, W.W.; Huang, Y. Path Planning and Tracking for Vehicle Collision Avoidance Based on Model Predictive Control with Multicentricity. IEEE Trans. Veh. Technol. 2017, 66, 952–964. [Google Scholar] [CrossRef]
- Mayne, D.Q.; Raković, S. Model predictive control of constrained piecewise affine discrete-time systems. Int. J. Robust Nonlinear Control 2003, 13, 261–279. [Google Scholar] [CrossRef]
- Michael, H.; Matveev, A.S.; Savkin, A.V. Algorithms for collision-free navigation of mobile robots in complex cluttered environments: A survey. Robotica 2015, 33, 463–497. [Google Scholar]
- Scokaert, P.O.M.; Mayne, D.Q. Min-max feedback model predictive control for constrained linear systems. IEEE Trans. Autom. Control 1998, 43, 1136–1142. [Google Scholar] [CrossRef]
- Ntousakis, I.A.; Nikolos, L.K.; Papageorgiou, M. Optimal vehicle trajectory planning in the context of cooperative merging on highways. Transp. Res. Part C Emerg. Technol. 2016, 71, 464–488. [Google Scholar] [CrossRef]
- Skjetne, R.; Fossen, T. Nonlinear maneuvering and control of surface vessels. In Proceedings of the MTS/IEEE OCEANS, Honolulu, HI, USA, 5–8 November 2001. [Google Scholar]
- Lapierre, L.; Soetanto, L.; Pascoal, A. Nonlinear path following with applications to the control of autonomous underwater vehicles. In Proceeding of the 42nd IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003. [Google Scholar]
- Ren, R.Y.; Zou, Z.J.; Wang, Y.D. Adaptive Nomoto model used in the path following problem of ships. J. Mar. Sci. Technol. 2018, 23, 888–898. [Google Scholar]
- Richards, A.; How, J.P. Robust distributed model predictive control. Int. J. Control 2007, 80, 1517–1531. [Google Scholar] [CrossRef]
- Qing, C.; Chun, L.; Jie, S. A new Lagrange multiplier approach for gradient flows. Computer Methods. Appl. Mech. Eng. 2020, 367, 113070. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Parameter |
|---|---|
| Size | 1.05 m (Length) 0.55 m (Width) |
| Weight | 15 kg |
| Load Capacity | 10 kg |
| Maximum Speed | 5 m/s |
| Communication Distance | Remote control: 1 km Base station: 2 km |
| Turning Radius | 227 mm |
| Mode of advancement | Jet Pump |
| Wave Resistance | Force 3 winds Waves 0.5 m |
| Maneuverability Index (K) | 0.6463 |
| Followability Index (T) | 1.0674 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Zhang, J.; Wang, F.; Zhou, H. Model Predictive Control Based on State Space and Risk Augmentation for Unmanned Surface Vessel Trajectory Tracking. J. Mar. Sci. Eng. 2023, 11, 2283. https://doi.org/10.3390/jmse11122283
Li W, Zhang J, Wang F, Zhou H. Model Predictive Control Based on State Space and Risk Augmentation for Unmanned Surface Vessel Trajectory Tracking. Journal of Marine Science and Engineering. 2023; 11(12):2283. https://doi.org/10.3390/jmse11122283
Chicago/Turabian StyleLi, Wei, Jun Zhang, Fang Wang, and Hanyun Zhou. 2023. "Model Predictive Control Based on State Space and Risk Augmentation for Unmanned Surface Vessel Trajectory Tracking" Journal of Marine Science and Engineering 11, no. 12: 2283. https://doi.org/10.3390/jmse11122283
APA StyleLi, W., Zhang, J., Wang, F., & Zhou, H. (2023). Model Predictive Control Based on State Space and Risk Augmentation for Unmanned Surface Vessel Trajectory Tracking. Journal of Marine Science and Engineering, 11(12), 2283. https://doi.org/10.3390/jmse11122283