
Wavelet Neural Network-Based Half-Period Predictive Roll-Reduction Control Using a Fin Stabilizer at Zero Speed

Abstract
:1. Introduction and Background
1.1. Rolling and Its Harm
1.2. Anti-Rolling Device
1.3. Roll-Reduction Control at Zero Speed
1.4. Research Content and Arrangement
2. Modeling of Ship Rolling Motion
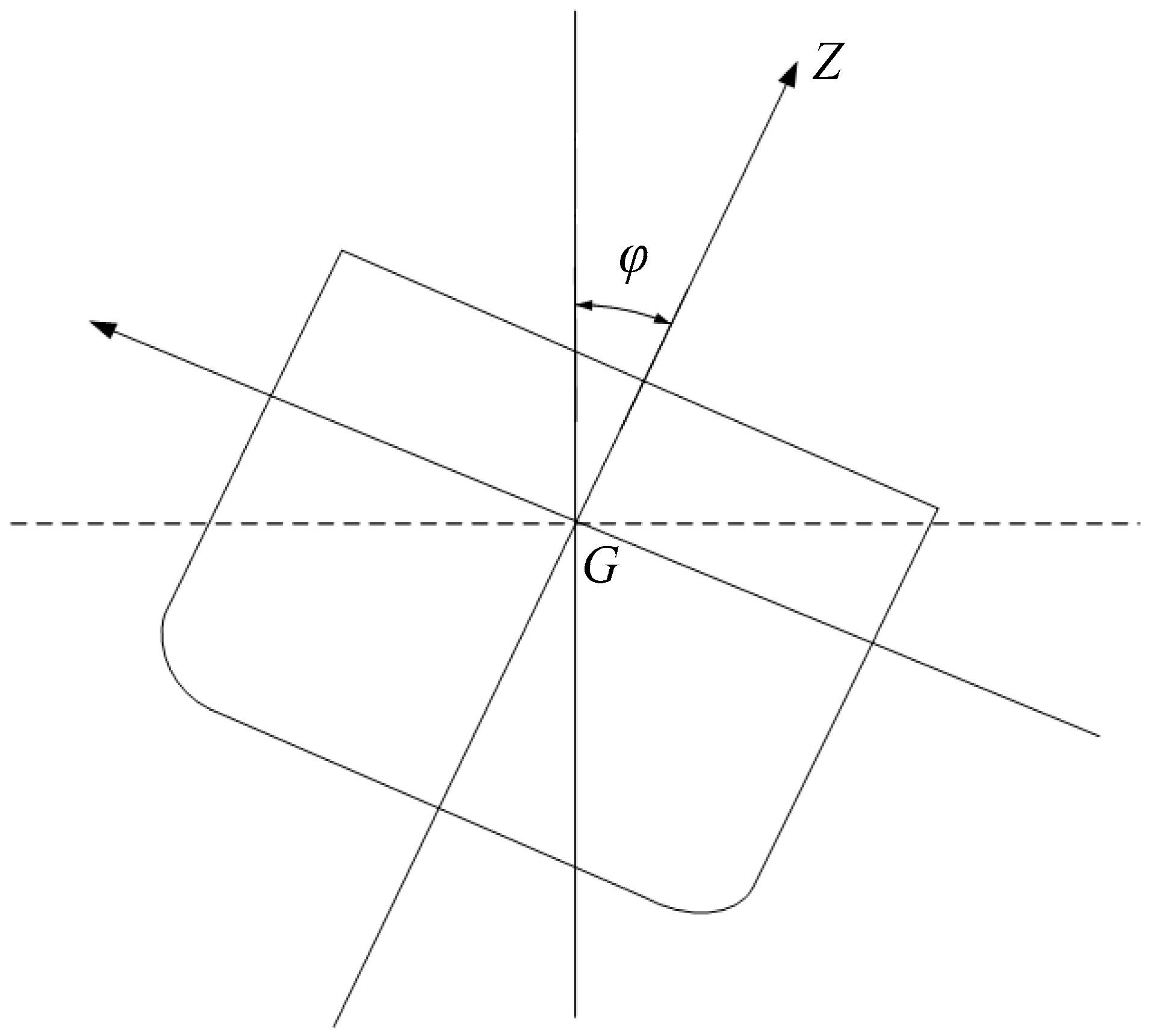
2.1. Mathematical Model of Ship Roll Motion
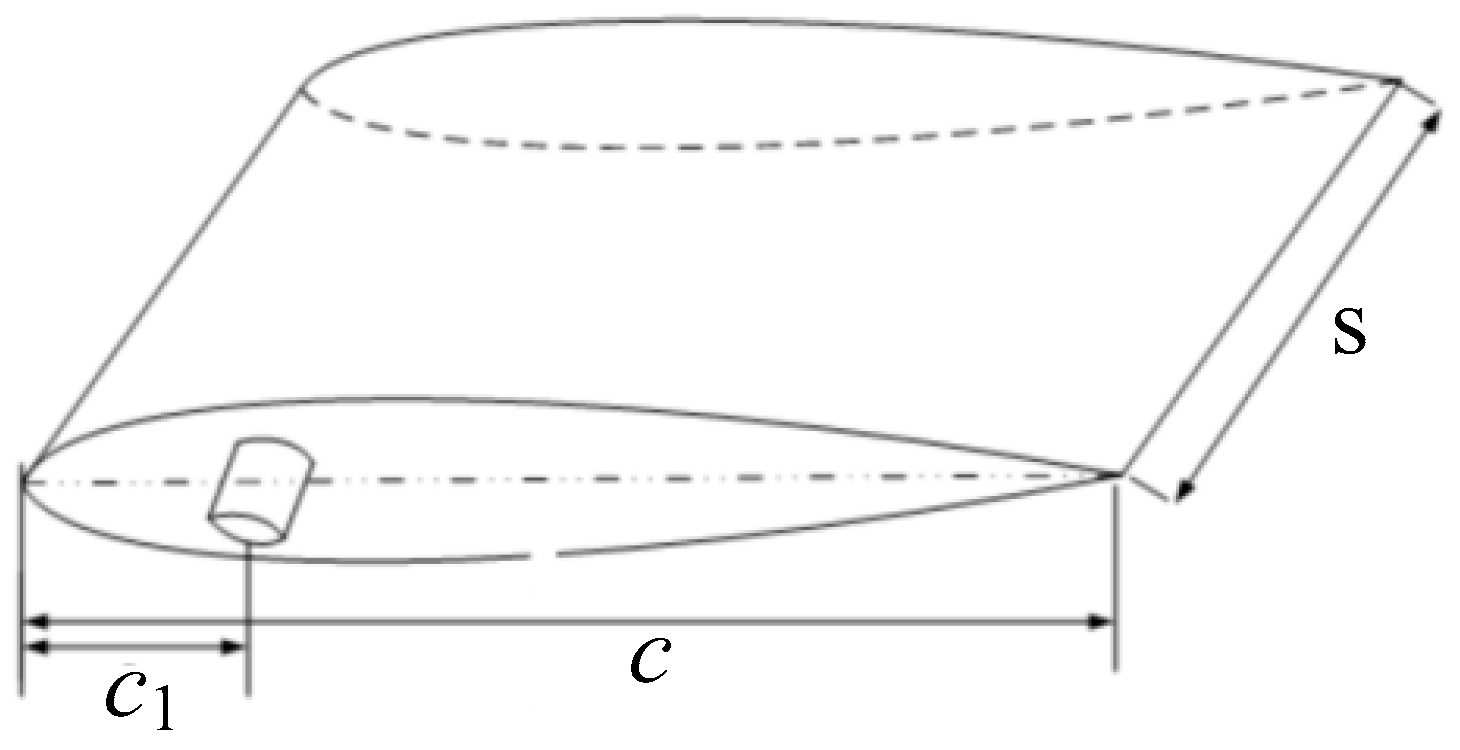
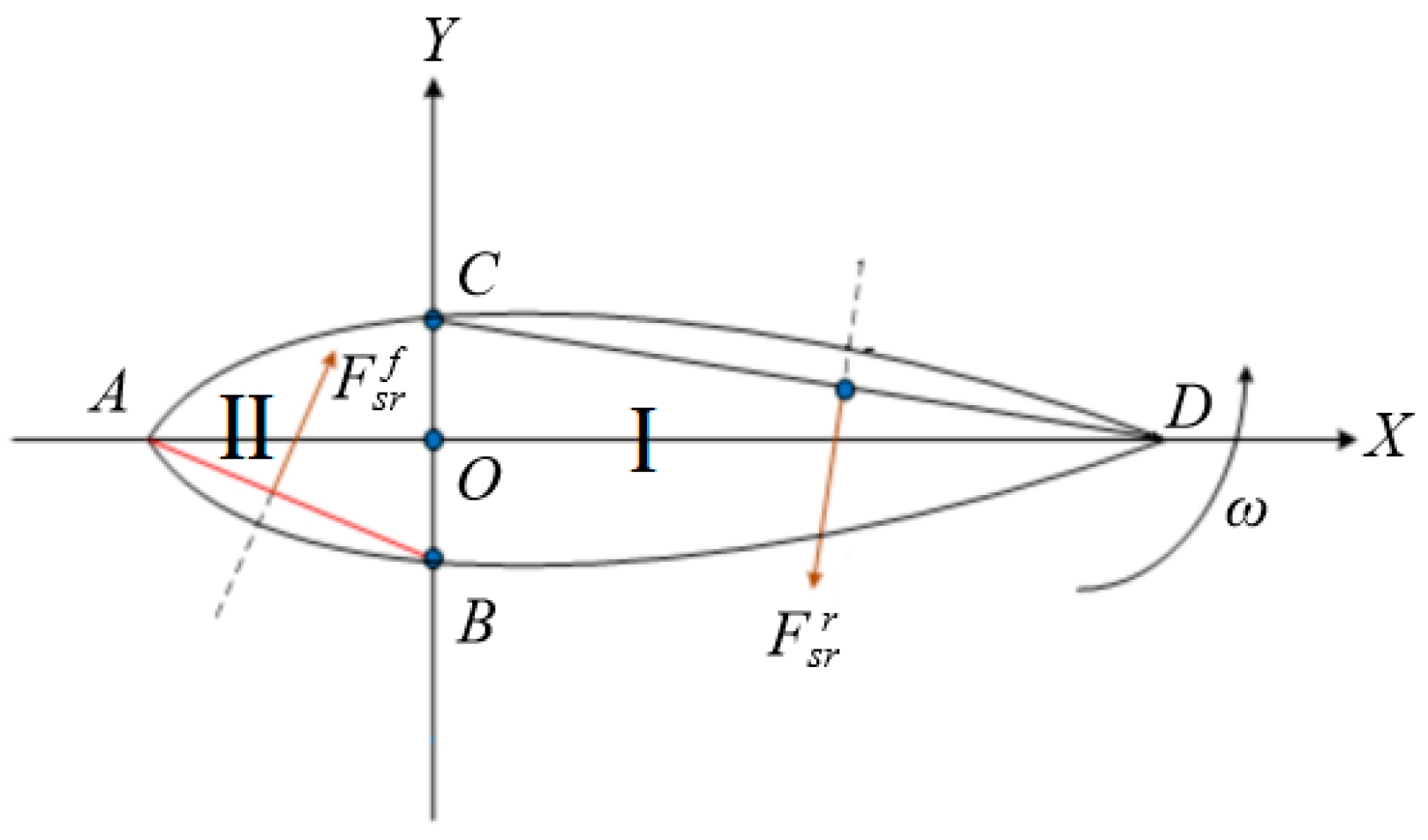
2.2. Mathematical Model of Fin Force
2.2.1. Shape Resistance
2.2.2. Vortex Resistance
2.2.3. Added Mass Resistance
2.2.4. Hydrodynamic Force
3. Zero-Speed Roll-Reduction Control Using Fin Stabilizer
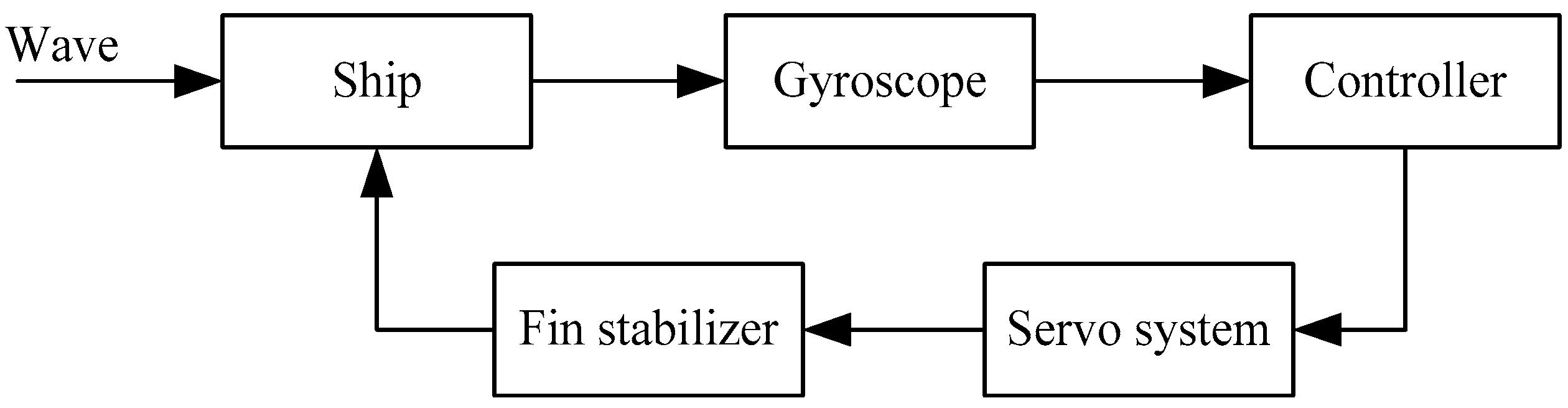
3.1. Mathematical Model of Roll-Reduction Control System
3.1.1. Ship Rolling Motion Equation
3.1.2. Angular Velocity Gyroscope
3.1.3. Servo System
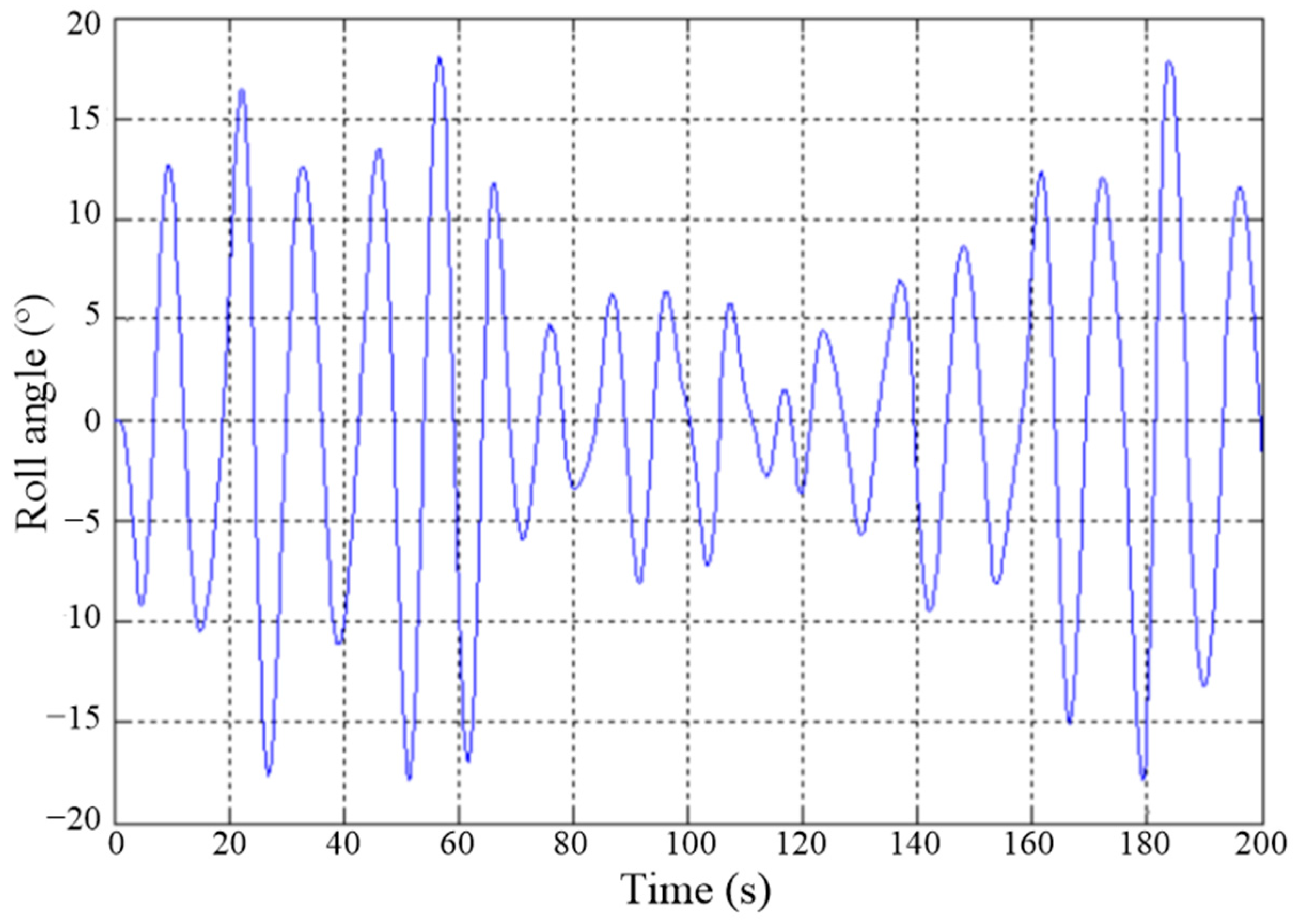
3.1.4. Wave Disturbance
3.2. Controller Design
3.2.1. PID Controller
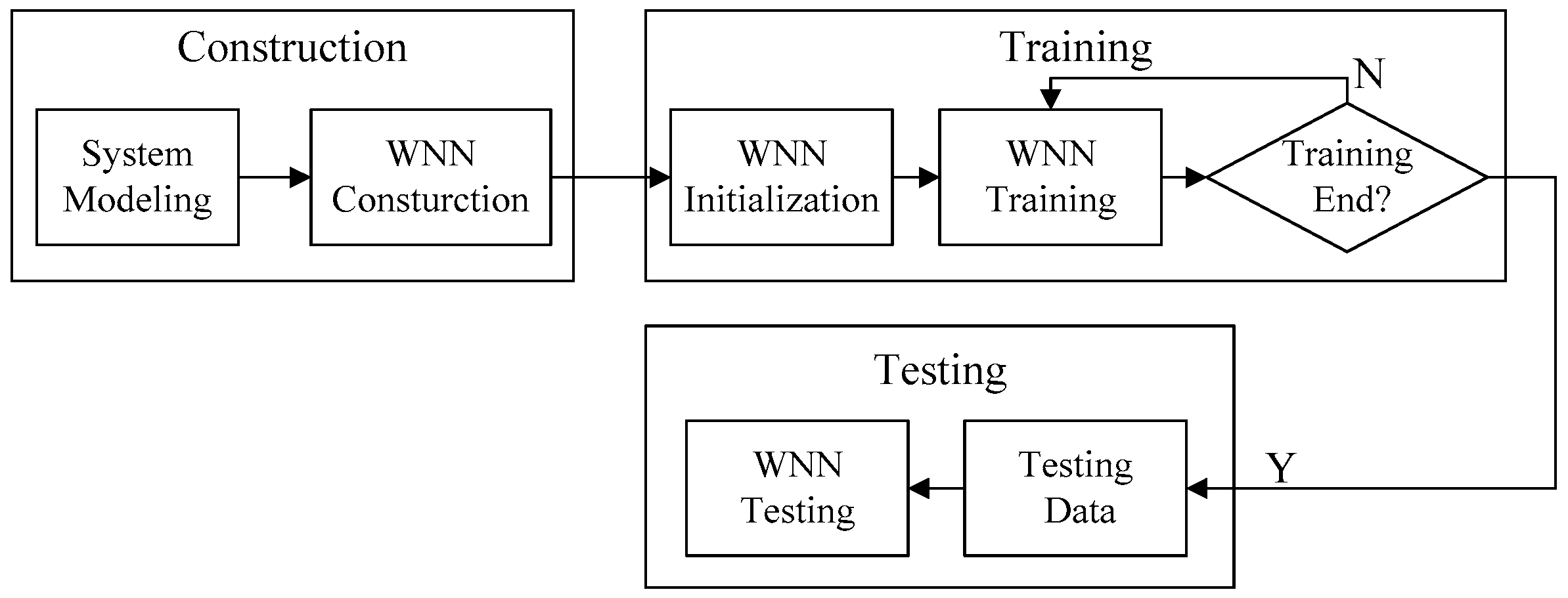
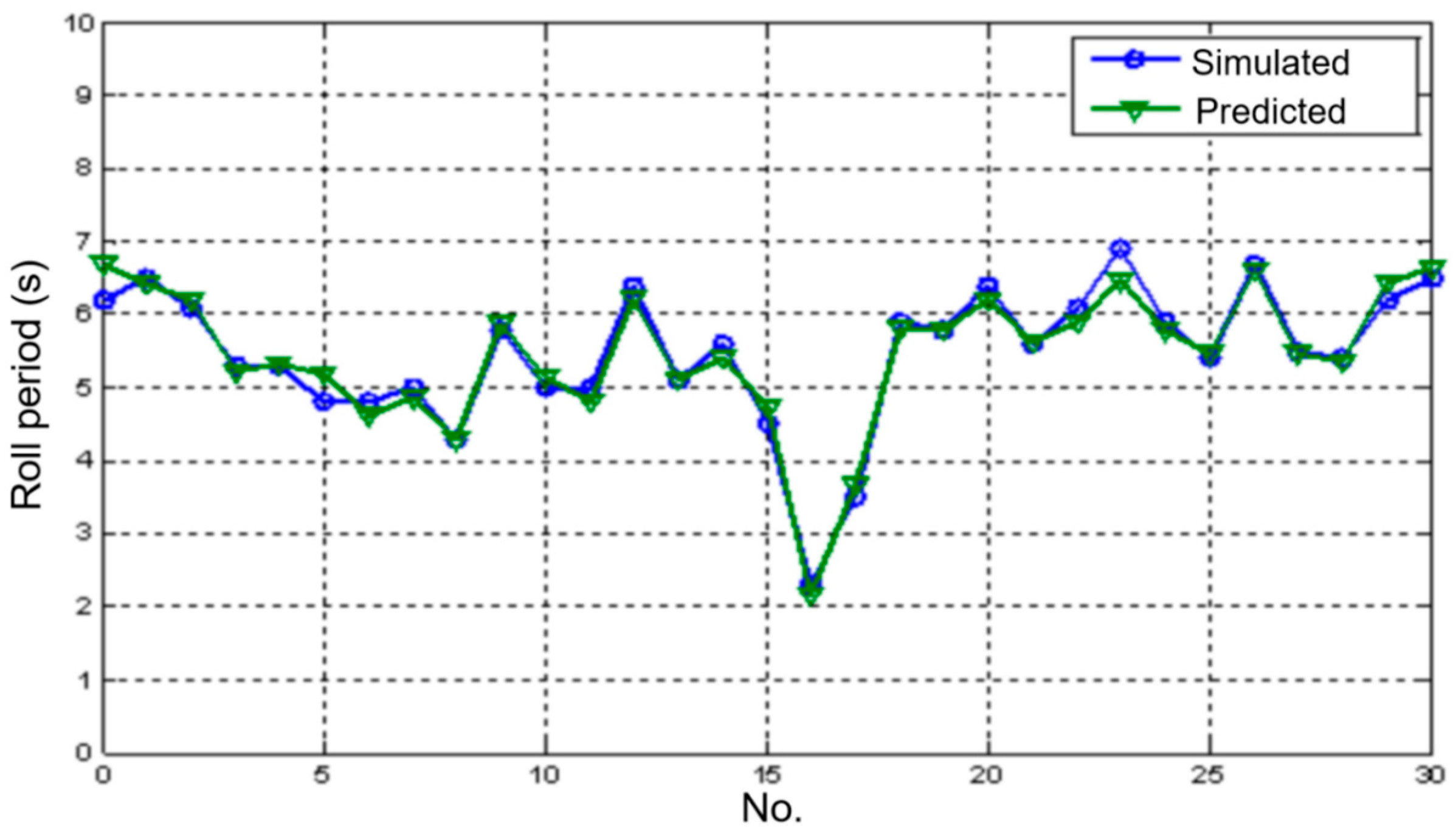
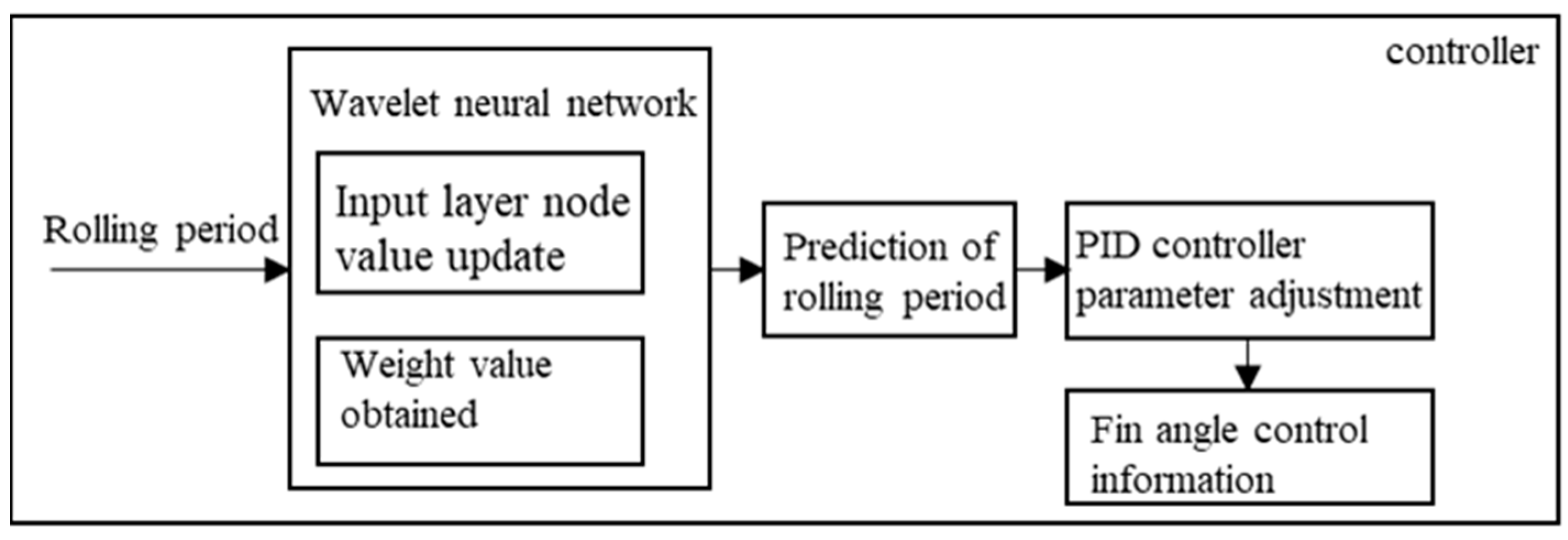
3.2.2. Half-Period Prediction Based on Wavelet Neural Network
3.2.3. Zero-Speed Fin Stabilizer Controller
4. Simulation and Experiments
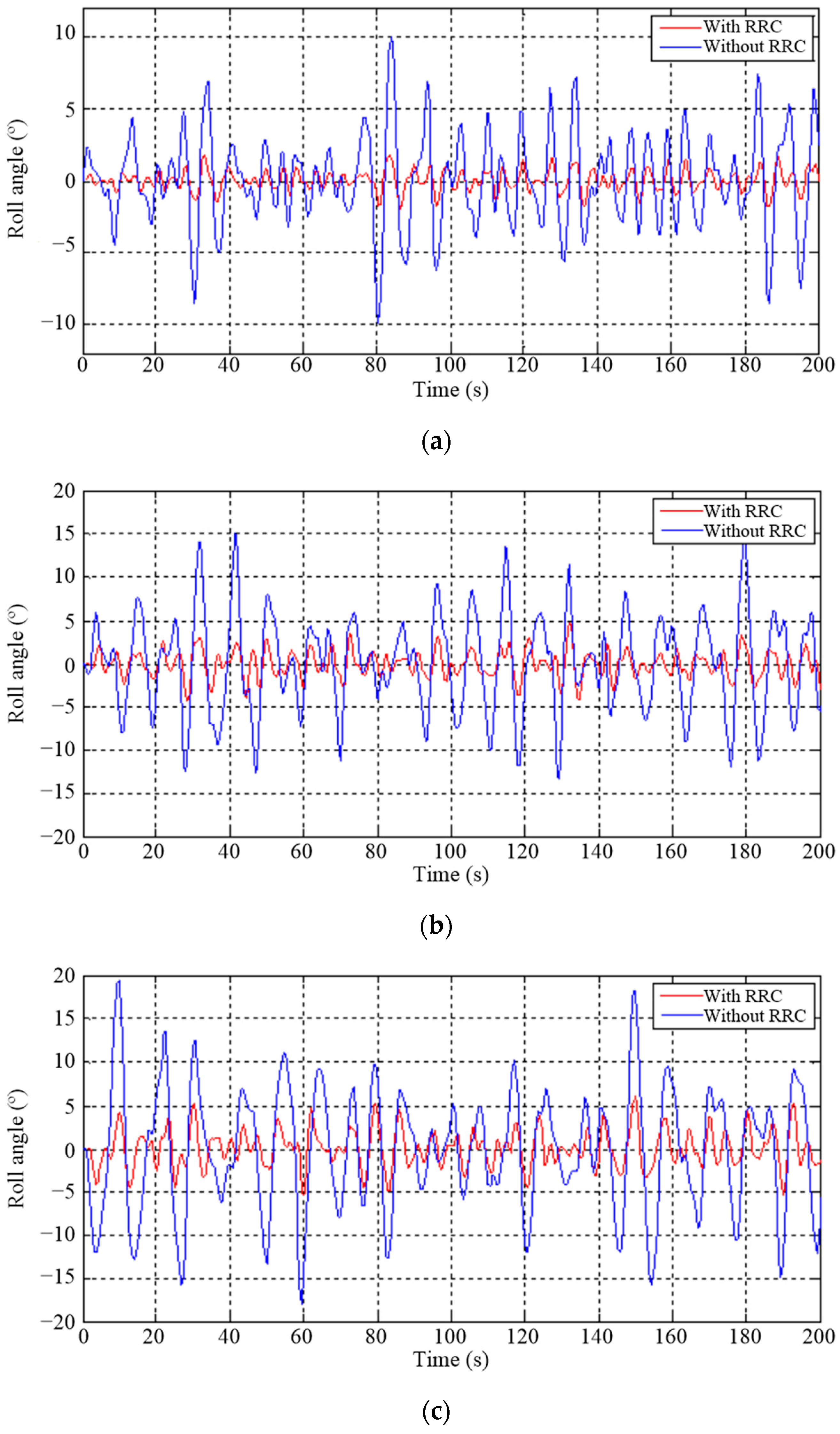
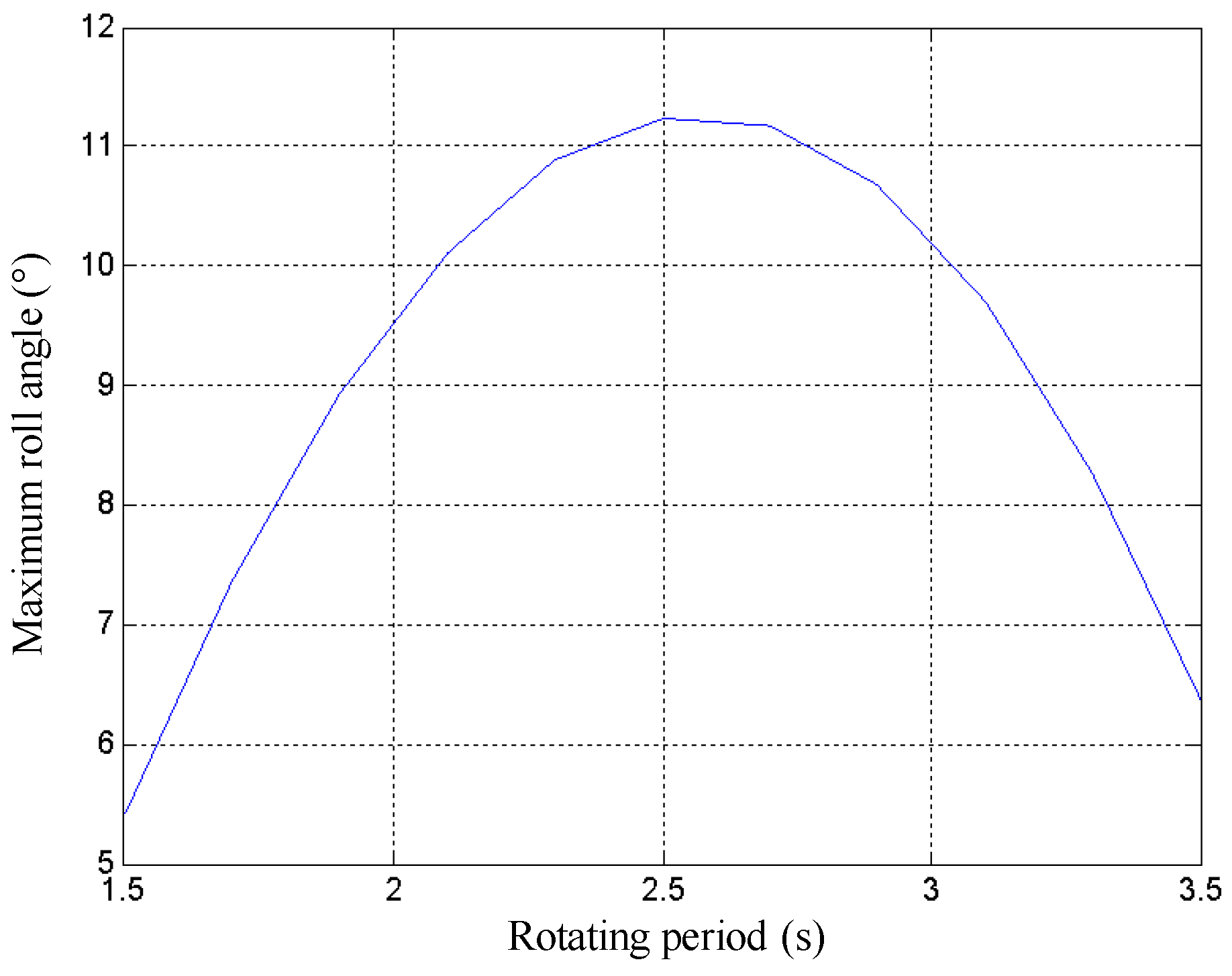
4.1. Simulation and Discussion
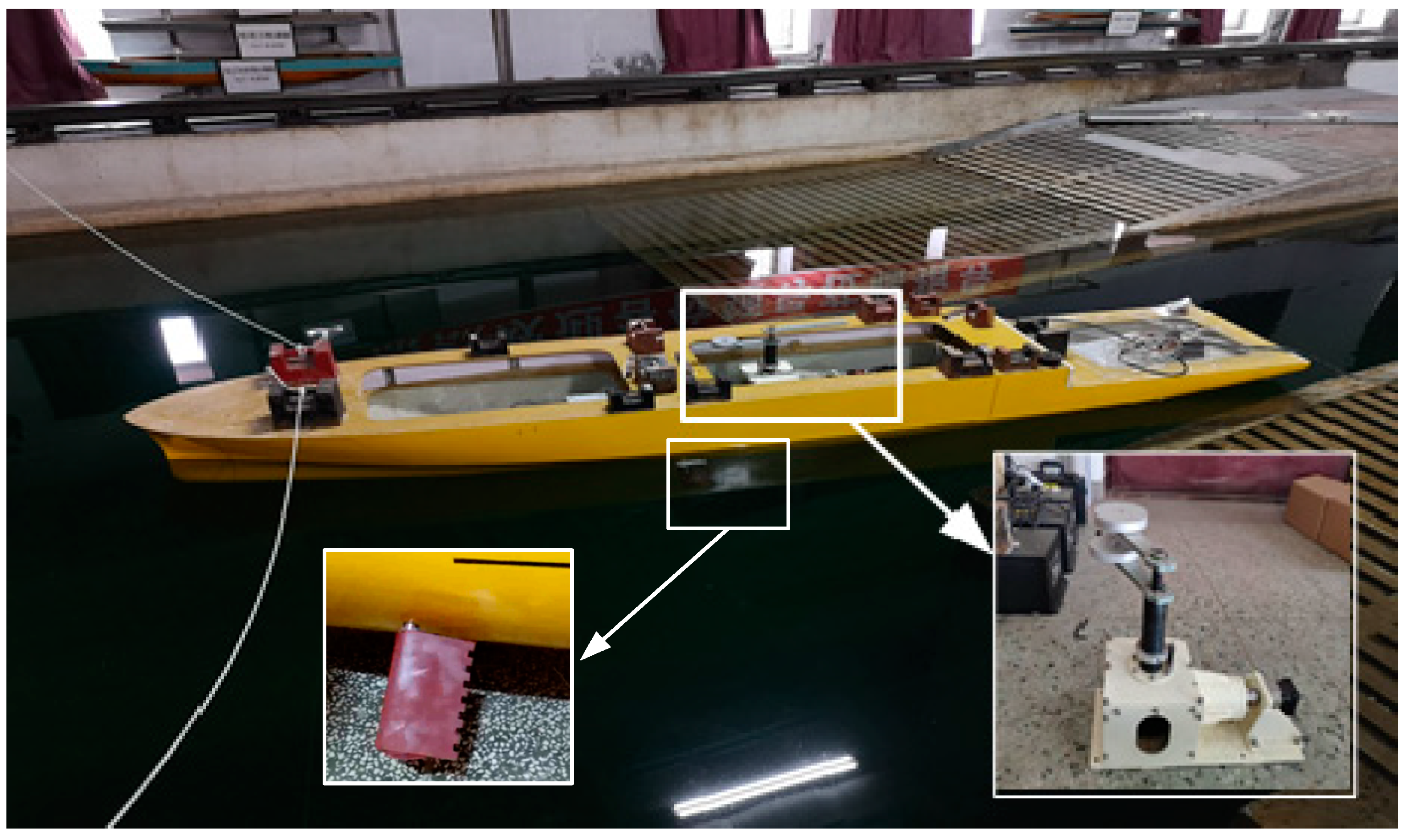
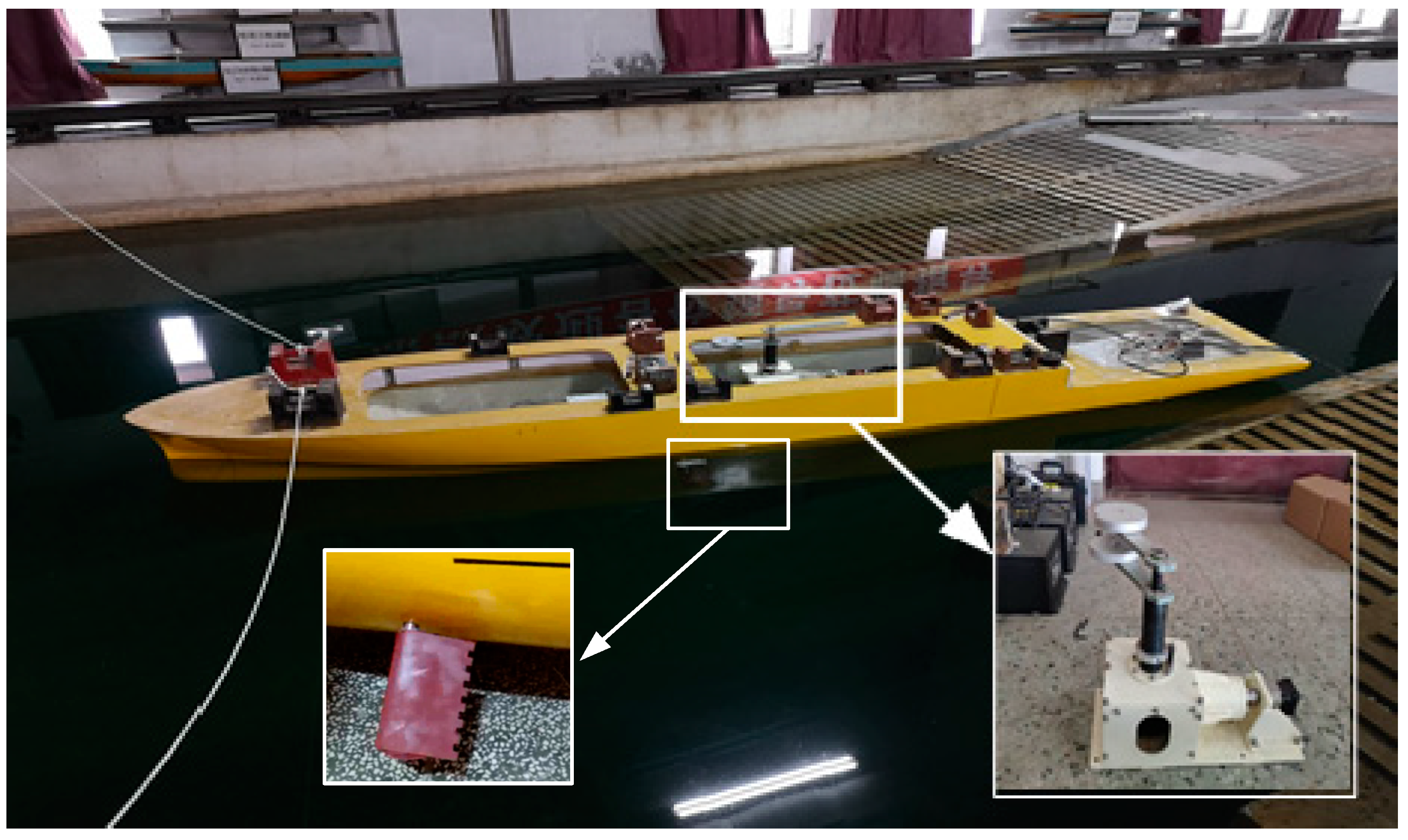
4.2. Model Ship Tank Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Perez, T. Ship Motion Control: Course Keeping and Roll Stabilisation Using Rudder and Fins; Springer: London, UK, 2005. [Google Scholar]
- Jin, H.; Yao, X. Ship Control Principle, 2nd ed.; Harbin Engineering University Press: Harbin, China, 2013. [Google Scholar]
- Talha, M.; Asghar, F.; Kim, S. Design of fuzzy tuned PID controller for anti rolling gyro (ARG) stabilizer in ships. Int. J. Fuzzy Log. Intell. Syst. 2017, 17, 210–220. [Google Scholar] [CrossRef]
- Liang, L.; Zhao, P.; Zhang, S.; Yuan, J.; Wen, Y. Simulation and analysis of Magnus rotating roll stabilizer at low speed. Ocean Eng. 2017, 142, 491–500. [Google Scholar] [CrossRef]
- Ozturk, D. Performance of a Magnus effect-based cylindrical roll stabilizer on a full-scale Motor-yacht. Ocean Eng. 2020, 218, 108247. [Google Scholar] [CrossRef]
- Gerrge, A.; Cho, I. Anti-sloshing effects of a vertical porous baffle in a rolling rectangular tank. Ocean Eng. 2020, 214, 107871. [Google Scholar] [CrossRef]
- Lewis, E. Principles of Naval Architecture, 2nd ed.; SNAME: Jersey City, NJ, USA, 1989; Volume 3. [Google Scholar]
- Perez, T.; Blanke, M. Ship roll damping control. Annu. Rev. Control. 2012, 36, 129–147. [Google Scholar] [CrossRef]
- Crossland, J. The effect of roll stabilization controllers on warship operational performance. Contr. Eng. Pract. 2003, 11, 423–431. [Google Scholar] [CrossRef]
- Zhang, S.; You, P.; Zhao, P.; Liang, L.; Li, R. Experimental study on the control form of fin stabilizer at zero speed. PLoS ONE 2018, 13, e0204446. [Google Scholar] [CrossRef]
- Moaleji, R.; Greig, A. On the development of ship anti-roll tanks. Ocean Eng. 2007, 34, 103–121. [Google Scholar] [CrossRef]
- Liang, L.; Jiang, Y.; Zhang, Q.; Le, Z. Aspect ratio effects on hydrodynamic characteristics of Magnus stabilizers. Ocean Eng. 2020, 216, 107699. [Google Scholar] [CrossRef]
- Dallinga, R. Roll Stabilization at Anchor: Hydrodynamic Aspects of the Comparison of Anti-Roll Tanks and Fins; Maritime Research Institute Netherlands: Amsterdam, The Netherlands, 2002. [Google Scholar]
- Ooms, J. The use of roll stabilisers fins at zero speed. In Quantum Controls BV, Nuth, Holland, Project; TU Delft Library: Delft, The Netherlands, 2002. [Google Scholar]
- Song, J.; Zhao, P.; Liang, L.; Ji, M. Force modeling of zero/low-velocity fin stabilizer and hydrofoil profile optimization. Ocean Eng. 2020, 213, 107635. [Google Scholar] [CrossRef]
- Jin, H.; Qi, Z.; Song, J. Ship Anti-Rolling Control Device and System at Zero Speed; National Defense Industry Press: Beijing, China, 2015. [Google Scholar]
- Kaplan, P. A study of prediction techniques for aircraft carrier motions at sea. J. Hydronautics 1969, 3, 121–131. [Google Scholar] [CrossRef]
- Yumori, I. Real time prediction of ship response to ocean waves using time series analysis. In Proceedings of the OCEANS 81, Boston, MA, USA, 16–18 September 1981; pp. 1082–1089. [Google Scholar]
- Triantafyllou, M.; Bodson, M.; Athans, M. Real time estimation of ship motions using Kalman filtering techniques. IEEE J. Ocean. Eng. 1983, 8, 9–20. [Google Scholar] [CrossRef]
- Masi, G.; Gaggiotti, F.; Bruschi, R.; Venturi, M. Ship motion prediction by radial basis neural networks. In Proceedings of the IEEE Workshop on Hybrid Intelligent Medels and Applications, Paris, France, 11–15 April 2011; pp. 28–32. [Google Scholar]
- Huang, B.; Zou, Z. Shipt-term prediction of ship pitching motion based on artificial neural networks. In Proceedings of the The 35th International Conference on Ocean, Offshore and Arctic Engineering, Busan, Republic of Korea, 19–24 June 2016. [Google Scholar]
- Xu, F.; Zou, Z.; Yin, J.; Cao, J. Identification modeling of underwater vehicles’ nonlinear dynamics based on support vector machines. Ocean Eng. 2013, 67, 68–76. [Google Scholar] [CrossRef]
- Hou, X.; Zou, Z. SUR-based identification of nonlinear roll motion equation for FPSOs in regular waves. Ocean Eng. 2015, 109, 531–538. [Google Scholar] [CrossRef]
- Huang, B. Online Modeling and Predicting of Ship Motions in Waves Based on Wavelet Neural Network; Shanghai Jiao Tong University: Shanghai, China, 2019. [Google Scholar]
- Zhang, Q.; Benveniste, A. Wavelet network. IEEE Trans. Neural Netw. 1992, 3, 889–898. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Wang, Z.; Wang, P. Pitch angle prediction of container ship based on improved wavelet neural network. J. Guangdong Ocean. Univ. 2022, 42, 117–121. [Google Scholar]
- Zhang, W.; Liu, Z. Online ship motion prediction based on wavelet neural network. J. Dalian Marit. Univ. 2013, 39, 25–28. [Google Scholar]
- Yin, J.; Perakis, A.; Wang, N. A real-time ship roll motion prediction using wavelet transform and variable RBF network. Ocean Eng. 2018, 160, 10–19. [Google Scholar] [CrossRef]
- Inoussa, G.; Peng, H.; Wu, J. Nonlinear times series modeling and predction using functional weights wavelet neural network-based state-dependent AR model. Neurocomputing 2012, 86, 59–74. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, Z. Real-time ship motion prediction based on time delay wavelet neural network. J. Appl. Math. 2014, 2014, 176297. [Google Scholar] [CrossRef]
- Huang, B.; Zou, Z.; Ding, W. Online prediction of ship roll motion based on a coarse and fine tuning fixed grid wavelet network. Ocean Eng. 2018, 160, 425–437. [Google Scholar] [CrossRef]
- Gao, N.; Hu, A.; Hou, L.; Chang, X. Real-time ship motion prediction based on adaptive wavelet transform and dynamic neural network. Ocean Eng. 2023, 280, 114466. [Google Scholar] [CrossRef]
- Dimitrios, K.; Iraklis, V.; George, G.; Takis, J.; Constantine, D. Enabling digital twins in the maritime sector through the lens of AI and industry 4.0. Int. J. Inf. Manag. Data Insights 2023, 3, 100178. [Google Scholar]
- Ferrandis, J.; Triantafyllou, M.; Chryssostomidis, C.; Karniadakis, G. Learning functionals via LSTM neural networks for predicting vessel dynamics in extreme sea states. Proc. R. Soc. A 2019, 477, 20190897. [Google Scholar] [CrossRef]
- Dallinga, R. Roll Stabilization of Motor Yachts: Use of Fin Stabilizers in Anchored Conditions. MARIN: Wageningen, The Netherlands, 1998. Available online: http://http://resolver.tudelft.nl/uuid:3aa9c3a8-1653-4029-b347-82f4f35d45c4 (accessed on 19 October 2023).
- Wang, F.; Jin, H.; Qi, Z. Modeling for active fin stabilizers at zero speed. Ocean Eng. 2009, 36, 1425–1437. [Google Scholar]
- Song, J.; Jin, H.; Meng, L. Optimum design of aerofoil for fin stabilizer at whole speed range. Ship Build. China 2013, 54, 1–10. [Google Scholar]
- Jin, H.; Wang, K.; Ji, M. Application of Intelligent Technique to Fin Stabilizers; National Defense Industry Press: Beijing, China, 2003. [Google Scholar]
- Liang, L. Hydraulic Transmission and Electro-Hydraulic Servo System; Harbin Engineering University Press: Harbin, China, 2005. [Google Scholar]
- Zhao, Y.; Yang, Q.; Su, D.; Zou, L.; Wang, A. Rogue wave prediction based on wavelet neural network. J. Harbin Inst. Technol. 2021, 53, 112–117. [Google Scholar]
- Wang, X.; Shi, F.; Yu, L.; Li, Y. Matlab Neural Network Analysis of 43 Cases; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 2013; pp. 279–287. [Google Scholar]
- Kong, L. Matlab Wavelet Analysis, Super Learning Manual; Posts & Telecom Press: Beijing, China, 2023. [Google Scholar]
- Liang, L.; Zhao, P.; Zhang, S.; Ji, M.; Song, J.; Yuan, J. Simulation and experimental study on control strategy of zero-speed fin stabilizer based on disturbance and compensation. PLoS ONE 2018, 14, e0204446. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value | Description | Symbol | Value |
|---|---|---|---|---|---|
| Length of ship | Lpp | 109 m | Displacement | D | 6500 t |
| Natural roll period | T | 12.5 s | Width of ship | B | 19 m |
| Transverse metacentric height | h | 1.5 m | Draft | d | 6 m |
| Midship section coefficient | Cm | 0.98 | Square coefficient | Cb | 0.56 |
| Bilge keel length | lBk | 21.8 m | Bilge keel width | bBk | 0.49 m |
| OG/d | — | 1.38 | B/d | — | 3.25 |
| lBk/Lpp | — | 0.2 | bBk/B | — | 0.025 |
| No. | Rolling Half-Period (s) | No. | Rolling Half-Period (s) | No. | Rolling Half-Period (s) |
|---|---|---|---|---|---|
| 1 | 5.6 | 11 | 5.9 | 21 | 4.8 |
| 2 | 4.5 | 12 | 5.4 | 22 | 4.8 |
| 3 | 2.3 | 13 | 6.7 | 23 | 5.0 |
| 4 | 3.5 | 14 | 5.5 | 24 | 4.3 |
| 5 | 5.9 | 15 | 5.4 | 25 | 5.7 |
| 6 | 5.8 | 16 | 6.2 | 26 | 5.1 |
| 7 | 6.4 | 17 | 6.5 | 27 | 4.9 |
| 8 | 5.6 | 18 | 6.1 | 28 | 6.5 |
| 9 | 6.1 | 19 | 5.3 | 29 | 5.1 |
| 10 | 6.9 | 20 | 5.3 | 30 | 5.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Zhao, P.; Gui, M.; Liang, L. Wavelet Neural Network-Based Half-Period Predictive Roll-Reduction Control Using a Fin Stabilizer at Zero Speed. J. Mar. Sci. Eng. 2023, 11, 2205. https://doi.org/10.3390/jmse11112205
Zhang S, Zhao P, Gui M, Liang L. Wavelet Neural Network-Based Half-Period Predictive Roll-Reduction Control Using a Fin Stabilizer at Zero Speed. Journal of Marine Science and Engineering. 2023; 11(11):2205. https://doi.org/10.3390/jmse11112205
Chicago/Turabian StyleZhang, Songtao, Peng Zhao, Manhai Gui, and Lihua Liang. 2023. "Wavelet Neural Network-Based Half-Period Predictive Roll-Reduction Control Using a Fin Stabilizer at Zero Speed" Journal of Marine Science and Engineering 11, no. 11: 2205. https://doi.org/10.3390/jmse11112205
APA StyleZhang, S., Zhao, P., Gui, M., & Liang, L. (2023). Wavelet Neural Network-Based Half-Period Predictive Roll-Reduction Control Using a Fin Stabilizer at Zero Speed. Journal of Marine Science and Engineering, 11(11), 2205. https://doi.org/10.3390/jmse11112205