1. Introduction
More and more ships are equipped with twin azimuth thrusters due to the requirement for better maneuverability. These ships are suitable for work in confined waters, such as rescue ships, off-shore vessels, supply ships, and cruisers. However, because ships are steered by azimuth thrusters, the maneuverability is obviously different from the conventional rudder and propeller-driven ship. At the same time, due to the obvious interaction between the two azimuth thrusters, the complex hydrodynamic effect, and the remarkable influence on ship maneuverability, the maneuvering capability and experimental method of the ships with azimuth thrusters are worthy of further study.
The methods of ship maneuverability research mainly include model-scale ship tests in a towing tank, full-scale ship tests, numerical simulation using computational fluid dynamics (CFD), and parameter identification based on application tests or full-scale ship data. At present, many methods based on theoretical calculation tests with experimental corrections are also widely used.
Alessandrini et al. [
1] calculated the flow field and hydrodynamic force of a series 60 ship under oblique and rotary motions when considering the influence of free-plane waves. Tahara et al. [
2] compared and analyzed the numerical results and the test value of the inclined shipping movement of the series 60 ship when the free-plane wave was considered and found that the two were in good agreement. Sakamoto et al. [
3] numerically simulated the viscous flow field of DTM5415 with a complex hull surface in pure roll and pure yaw motion. While ignoring the influence of free surface, Yang Yong [
4] carried out a numerical simulation on the pure transverse motion of the KVLCC1 ship test in deep and shallow water. Li Dongli [
5] used the Ansys Fluent and dynamic grid technique to numerically simulate the hydrodynamic performance of a ship in pure roll and yaw motion and, proved the linear relationship between hydrodynamic force and motion frequency, and indirectly proved the feasibility of numerical simulation. The calculated results were consistent with those of the potential flow method. Zhou [
6] carried out a numerical simulation of the viscous flow field around the ship in shallow water using the CFD method and obtained the variation law of the hydrodynamic coefficient under the influence of drift angle.
In recent years, more and more scholars have paid attention to the study of ships with azimuth thrusters. Islam et al. [
7]. introduced a numerical prediction and experimental evaluation scheme for combined propellers. Delefortrie et al. [
8] established a maneuvering motion test for an estuary container vessel with two interacting Z-drives by captive experiments in the towing tank. Based on the MMG test, Reichel et al. [
9] obtained the hull hydrodynamic derivatives and pod propeller hydrodynamic coefficients of a medium-sized oil tanker through the captive test and open water test in the towing tank and verified them in the ship-handling simulator. Reichel et al. [
10] researched the equivalent standard maneuvers for pod-driven ships by using the comparative test of two sister ships of the same scale brass tests, i.e., twin-pod and twin-propeller twin-rudder configurations. Mu et al. [
11] established an MMG test for a small vector-propelled unmanned ship, “Lanxin”, by combining empirical formulas with system identification. Wu et al. [
12] analyzed the forces acting on the twin azimuth propellers and established the MMG test to carry out the numerical simulation and prediction of the maneuverability and ascertain the hydrodynamic derivatives. The maneuverability of a self-propelled test ship with twin full-revolving rudder propellers was analyzed in a self-propelled test in still water and waves [
13]. Luo [
14] analyzed the influence of the pod structure on the hydrodynamic performance and the pod structure and hydrodynamic characteristics of the propellers through CFD. Ji [
15] carried out the numerical simulation and prediction of the maneuverability of the ship with azimuth thrusters using the RANS method. Zhao et al. [
16] predicted the self-propulsion performance of a ship with double-L-type podded propulsors and established a conversion method for the performance of a full-scale ship. Zhou et al. [
17] verified and calculated the maneuverability prediction for a 27000 DWT multipurpose cargo ship. The results showed that the theoretical values are in good agreement with experimental results. Ruiz M T et al. [
18] expounded a former test of an estuary vessel with two contra-rotating Z-drives and gave an extensive discussion of the effect of the Z-drives on the maneuvering behavior of the estuary vessel. Okuda et al. [
19] used an equivalent single rudder (ESR) test to simulate the maneuvering of the ship with a twin-propeller and twin-rudder ship in shallow water, and the results showed that the theoretical values are in good agreement with the experimental results. Guillaume et al. [
20] implemented a new mathematical model in the ship maneuvering simulator and compared it against free-running model tests, which, after slight tuning, seemed capable of capturing the maneuvering motion of the ship in 6DOF. Ghani et al. [
21] compared the outcomes from experimental works on hulls with and without pods to describe the effect of pod propulsor attachment to the existing naval vessel hull form, which was designed for conventional propulsors in aspects of resistance and motion characteristics. Witold et al. [
22] analyzed two different propulsion systems from the point of view of future control applications, one with a pushing single screw propeller and a blade rudder, the other with pods, and presented equations describing forces and moments generated in both systems, then showing exemplary results of a simulation in comparison to the real-time experiments for two ships. Chenliang Zhang et al. [
23] yielded
,
, and
of the ONRT hull at four advancing speeds via linear regression of the hydrodynamic forces and moments predicted by CFD calculations and concluded the relationship between hydrodynamic derivatives and advancing speed while giving the expressions of hydrodynamic derivatives that can be used in an MMG model.
Many of the above studies primarily focused on assessing the maneuverability of ships equipped with azimuth thrusters through towing tank tests. However, it is well known that towing tank tests are expensive, and most researchers lack the experimental conditions.
This study presents a method of maneuverability study for the ship with two azimuth thrusters using CFD numerical calculation. As a specific example, the captive test is conducted by numerical simulation on the STAR-CCM+ platform. In the present work, all calculations are based on the unsteady Reynolds-averaged Navier–Stokes (URANS) method and the shear stress transport (SST) k-w turbulence model. Maneuvering simulations of turning are conducted using the hydrodynamic coefficients obtained from numerical calculations. The test is validated by comparing the simulation results with the results of full-scale ship tests.
2. Methodology
2.1. Governing Equations
In this study, the RANS method was used to solve the flow field around the hull. Ship captive tests are conducted by planar motion mechanism (PPM). The PPM tests mainly consist of the simulation of oblique motion, pure sway motion, pure yaw motion, combined motions, and so on. The PMM tests are performed based on the simulation of the unmanned ships using the STAR-CCM+ platform, considering the influence of fluid viscosity and free surface wave profiles to calculate the hydrodynamic coefficients of the ship.
The governing equations include the continuity equation and momentum equation. The continuity equation is shown in the Equation (5) [
12] as
The momentum equation is shown in the Equation (5) as
where
is the density of the fluid,
is the mean velocity of the fluid micro cluster in the
i direction,
is the velocity of the grid cell in the
i direction,
is the pressure,
is the mass force, and
is the Reynolds stress,
.
The relationship between the Reynolds stress and the average velocity for incompressible fluid is established based on the Boussinesq assumption.
where
is the turbulent dynamic viscosity coefficient,
is the turbulent kinetic energy,
is the second-order tensor of Kronecker isotropy, and the expression is as follows.
With the introduction of the relationship between Reynolds stress and mean velocity, the ten unknowns in the continuity equation and momentum equation are reduced to six, but the number of unknowns is still greater than the number of equations. Therefore, it is necessary to introduce a turbulence test to constitute a closed set of RANS equations.
2.2. Turbulence Model and VOF Method
The calculation accuracy of SST is the highest according to the commonly used turbulence tests and the previous calculation experience, mainly because the test has a good simulation effect on the low Reynolds number flow near the wall. The calculation results of are also good. The turbulence test takes the rotation effect into account and has good calculation results for low Reynolds number flow after treating the near-wall surface. Although the calculation accuracy of SST is higher than that of , it takes more time, and it is difficult to achieve convergence because there is some rotating fluid in the large opening, and is very suitable for simulating complex fluid rotation problems. Therefore, the test is adopted. The turbulence model was used for the turbulence test, and the volume of fluid (VOF) method was used for the free surface capture solution.
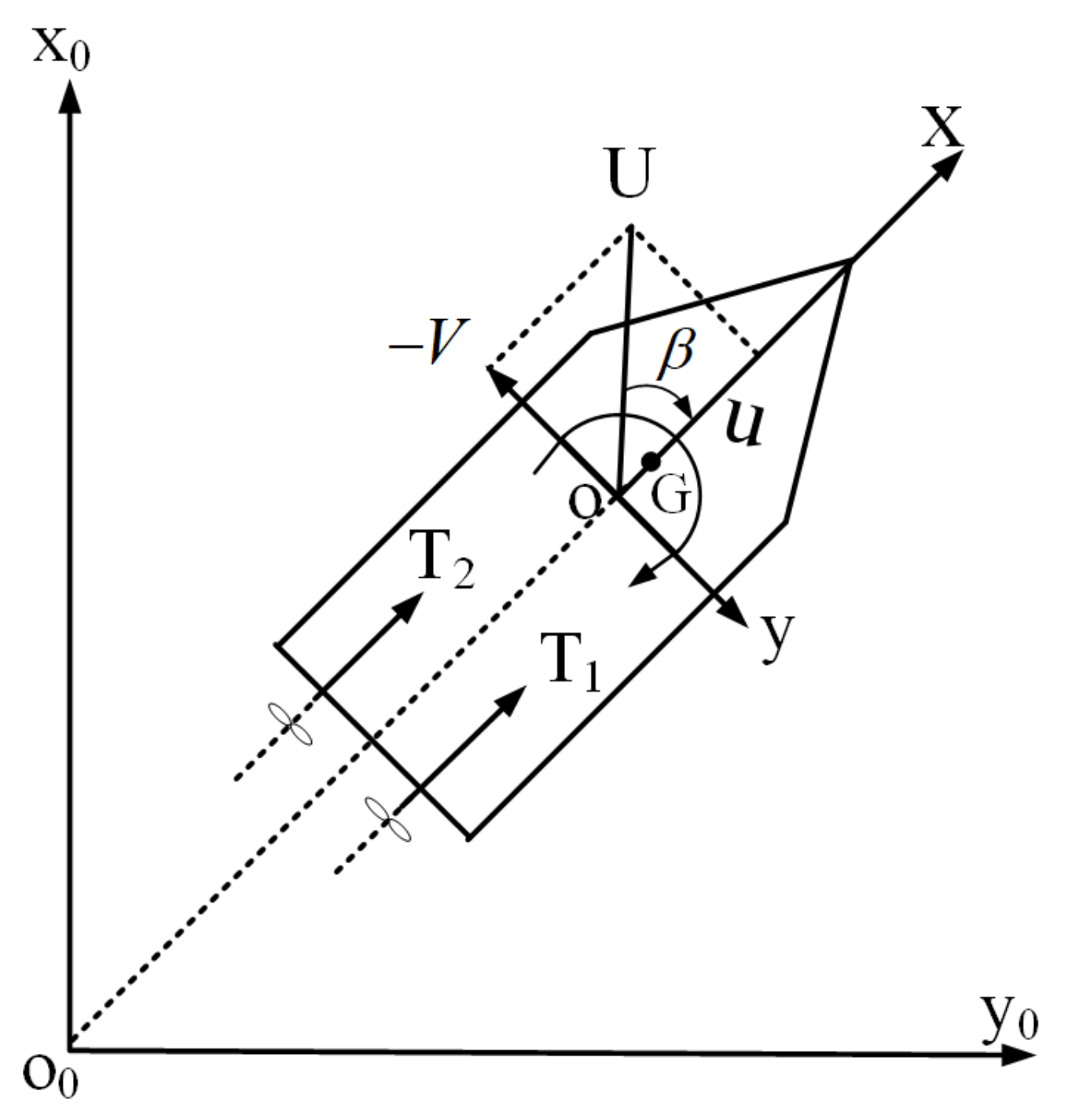
2.3. Coordinate System and MMG Test
Figure 1 shows two right-hand cartesian coordinate systems used to establish MMG ship maneuvering motion models. One is the earth-fixed coordinate system, where the
O0-
x0-
y0 plane coincides with the still water surface, and the other is the horizontal ship-fixed coordinate system
O-
x-
y, where
O is the coordinate origin, which coincides with the gravity center of a ship.
It is assumed that the ship test is sailing in unrestricted deep and wide water. The ship is regarded as a rigid body, and the free surface is regarded as a still water surface. The present study only considers the motion of the ship in the horizontal plane and ignores the influence of the ship’s roll motion. Therefore, the mathematical test can be described by Equation (5) in the ship-fixed coordinate system.
where
is the mass of the ship;
and
are the added masses for surge and sway;
and
are the moment of inertia and added moment of inertia for yaw, respectively;
and
are the surge and sway velocities, respectively;
is yaw rate;
and
, respectively, represent the forces acting in the longitudinal directions on the hull and propeller;
and
, respectively, represent the forces acting in the lateral directions on the hull and propeller;
and
are the moments of the hull and propeller, respectively, with respect to the z-axis.
2.4. Forces and Moment Acting on the Hull
The principal aim of this study’s numerical simulations concerning a ship’s hull forces is to validate the applicability of the proposed methodology to vessels featuring dual azimuth thrusters. In situations where the numerical vessel model operates under conditions of slight motion and in a state of regular flow, the effect of higher-order terms in the equations is overshadowed by the prevailing impact of lower-order terms. Consequently, the omission of higher-order terms becomes justified. Furthermore, in scenarios characterized by regular flow conditions, such as calm water surfaces and constant flow velocities, the influence of higher-order terms in the equations on computational outcomes is relatively negligible, thus underscoring the feasibility of their simplification. Equation (6) [
24] is used for the forces and moment acting on the hull.
where
,
,
,
,
,
are the related hydrodynamic coefficients.
2.5. Forces and Moment Acting on Propulsors and Hull Interactions
The hydrodynamic characteristics of twin azimuth thrusters are highly intricate. Due to the independent maneuvering capability of these thrusters, they can be controlled either synchronously or asynchronously, resulting in a diverse range of deflection angle combinations. Consequently, considering the thrust distribution of dual azimuth thrusters, it is imperative to simultaneously account for both longitudinal and transverse forces. This paper primarily focuses on validating the feasibility of the numerical model’s performance and intends to conduct comprehensive investigations into the multidirectional hydrodynamic characteristics of dual thrusters in future studies. In this context, the present work offers a theoretical exposition of various factors influencing the azimuth thrusters, including the reciprocal influences between the vessel’s hull and the thrusters. The formulas are as follows:
where
,
are longitudinal and lateral force of propulsors for actual hydrodynamic conditions (behind hull propulsor),
is the thrust coefficient,
is the hull-propulsors interaction coefficient,
is the location of additional lateral force induced on the hull by propulsors,
,
are the coordinates of propulsors,
is the thrust,
is the side force on propulsors,
is the thrust coefficient,
is the side force coefficient,
is the actual water inflow to propulsors.
The relationship between the forces and moments exerted on the azimuth thrusters and the forces generated on the aft hull by the propeller is defined by Equation (7). The forces generated on the aft hull by the propeller are related to the propeller thrust, transverse force, and azimuth angle through Equation (8). However, it should be noted that the propeller thrust and transverse force are influenced by factors such as the actual inflow angle and advance coefficient of the propeller, as expressed in Equations (9) and (10). Equations (7)–(10) above are quotes from Maciej Reichel’s paper (2017) [
9]. Consequently, the relationship between the actual inflow angle of the propeller and the propeller’s azimuth angle and drift angle can be experimentally determined to obtain the corresponding hydrodynamic coefficients using Equations (11) and (12).
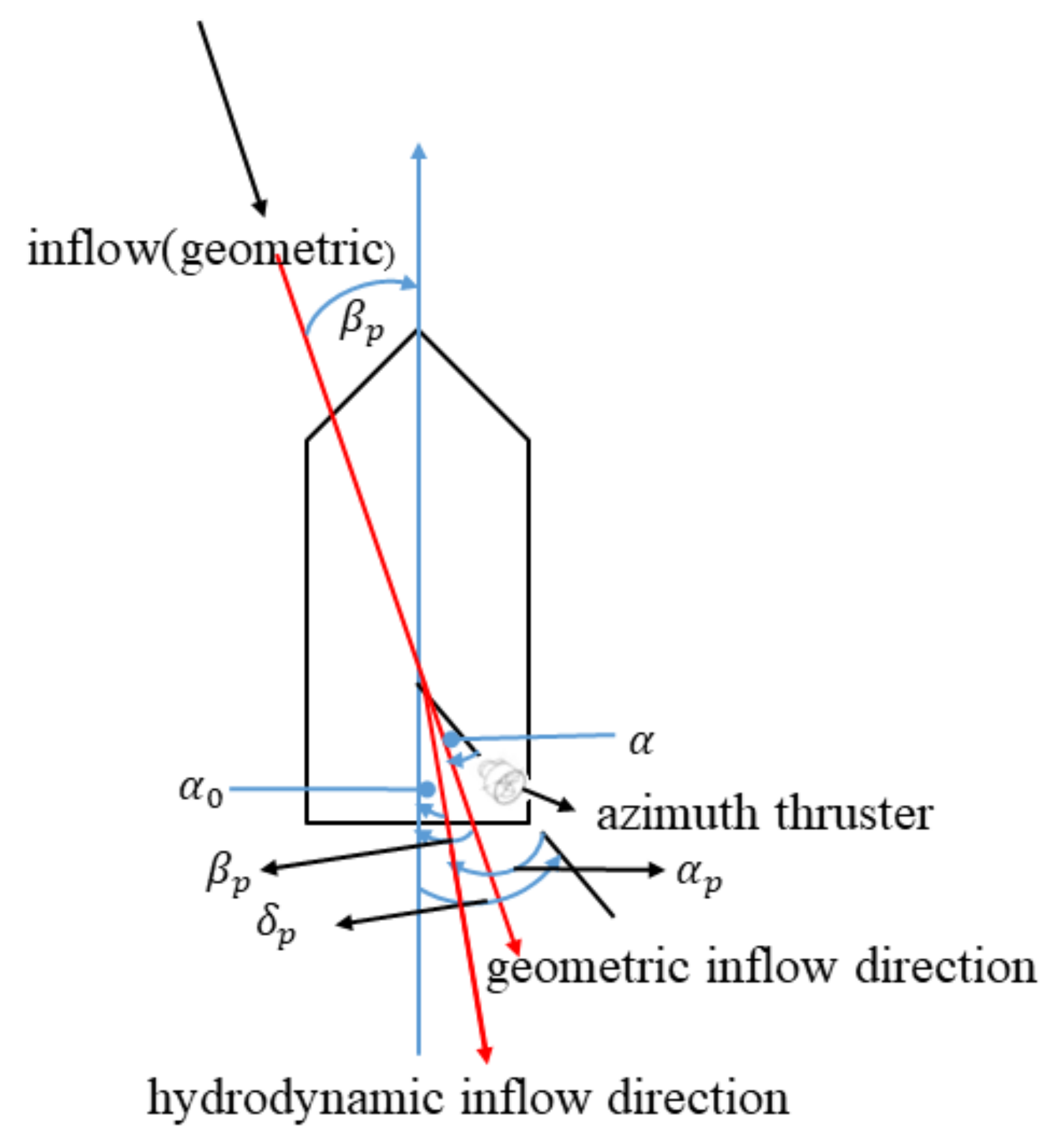
Figure 2 illustrates the relationship between the actual inflow angle of the propeller and the propeller’s azimuth angle and drift angle.
The relationships depicted in
Figure 2 can be expressed as follows:
Geometric Azimuth Thruster Angle [
24],
Actual Water Inflow Angle,
where
is the azimuth thruster angle relative to the longitudinal axis of the ship,
is the geometric drift angle at the azimuth thruster,
will be the same as the ship’s drift angle
for oblique model tests,
is the hydrodynamic neutral angle of propulsors,
is the flow straightening coefficient.
Consequently, utilizing the aforementioned series of equations, we can deduce the interrelationship between the propeller and the hull, as well as the correlation between the actual inflow angle of the propeller and the propeller’s azimuth angle. In our forthcoming investigations, we aim to ascertain the corresponding hydrodynamic coefficients by means of numerical simulations and experimental validation.
4. Results and Discussion
Through numerical simulations of oblique motion tests, pure sway tests, and pure yaw tests, we have obtained partial ship hydrodynamic coefficients. Furthermore, the added mass, moment of inertia, and proximity coefficient of the ship can be calculated, serving as valuable references for ship maneuvering experiments.
4.1. Added Masses Used for Maneuvering Test
The regression Equations (26)–(29) are used to calculate
,
,
and
of the ship.
where
refers to the block coefficient. The calculation results for the test ship are presented in
Table 8.
4.2. The Comparison of Numerical Simulation and Model-Scale Ship Test Results
The ship maneuvering motion test is determined as Equation (30) based on the parameters and coefficients obtained from the PMM tests and regression equations.
The motion control equations of the vessel are also influenced by the advance speed J and the effective inflow angle α, the relevant aspects of which will be investigated in subsequent experiments.
Employing the maneuvering test, since there are multiple variables in Equation (30), the specific relationship between variables is given in the later study, and
is taken here for the simulation test. Equation (30) is reduced to:
Numerical simulations are conducted in Matlab (R2021a), and the numerical results are compared with test results to validate the ship’s maneuvering tests. It has to be noted that additional external forces, including current, have not been taken into consideration during simulations.
Model-scale ship tests were carried out on Moon Lake at Zhanjiang’s Haibin Park, shown in
Figure 14. The turning tracks of the ship were derived from Google Maps, as shown in
Figure 15. The wind velocity was around 2 m/s, and the wind direction was west during the tests.
Model-scale ship tests were all conducted in unrestricted waters, without the interaction influence of shallow water or banks. It is worth noting that the twin propellers were kept at the same azimuth angles and revolutions.
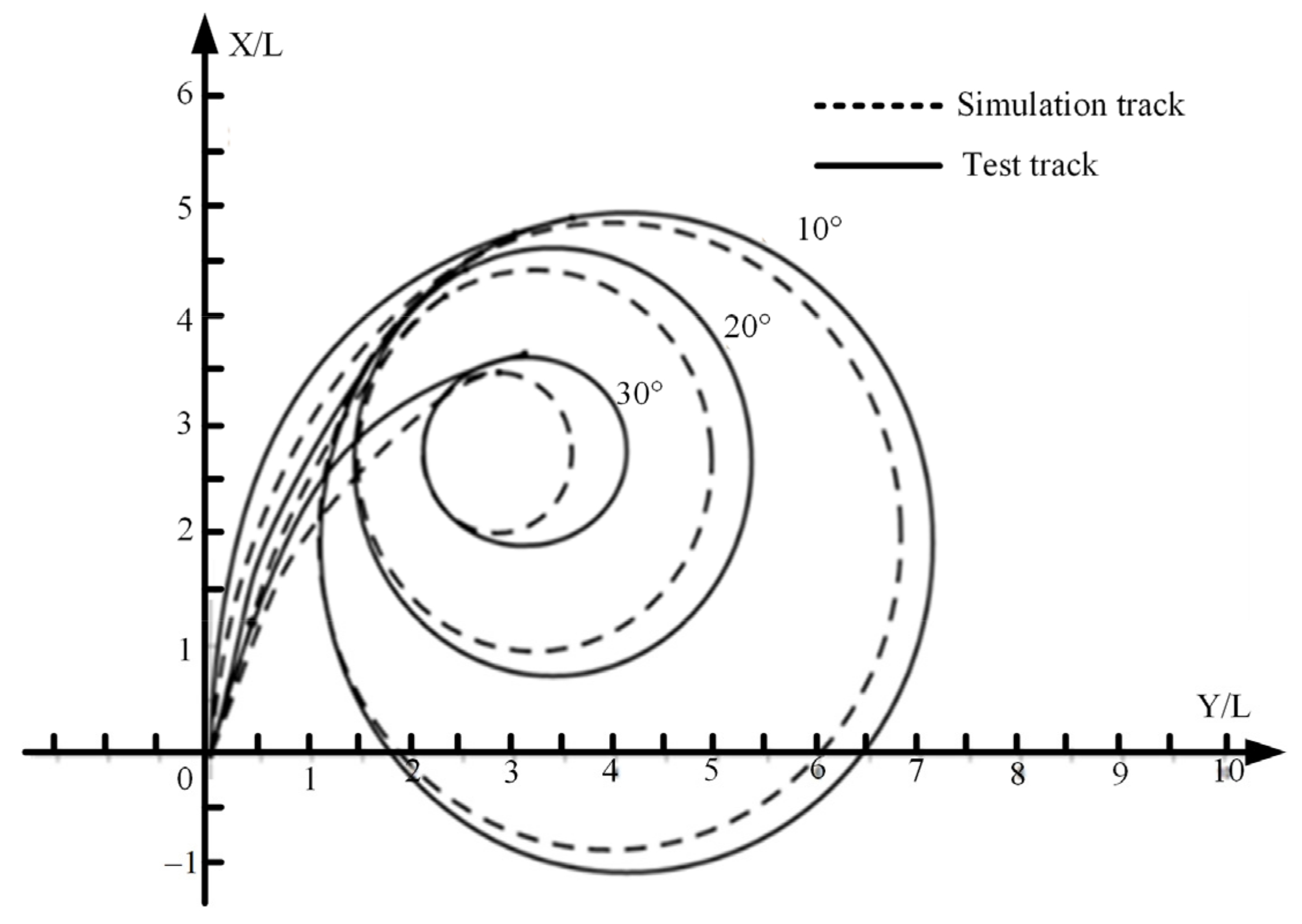
Figure 16 shows the comparison between the numerical results and the experimental values of the 10°, 20°, and 30° starboard turning maneuvers. The simulation of the COG path shows smaller values of tactical diameter. The rate of turn from tests and simulations are similar and correspond well to each other. It can be seen that it is not possible to change the turning rate in a realistic time like simulations during test trials due to wind force. Nevertheless, the proposed mathematical test method can predict the ship's motion trend with acceptable accuracy.
5. Conclusions
In this study, a mathematical model was developed to predict the maneuvering abilities of a ship with twin azimuth thrusters. An approach to using the MMG test to describe forces and interactions on the hull and drives was introduced. To obtain hydrodynamic coefficients, including the hull hydrodynamic derivatives and azimuth propellers hydrodynamic coefficients, a set of captive tests of PMM and open-water tests were simulated using STAR-CCM+. The numerical results have been validated against test results. Based on the research conducted, the following conclusions can be drawn:
(1) The MMG approach can be successfully used in the case of ships with two azimuth thrusters, which can guarantee the description of the force of the ship with twin azimuth thrusters;
(2) STAR-CCM+ is a good tool for CFD numerical calculation to obtain hull hydrodynamic derivatives and the propeller’s hydrodynamic coefficients by simulating captive and open water tests, and the work can lower the cost compared with towing tank experiments;
(3) Although the developed and presented method for describing hydrodynamic characteristics of an azimuth thruster is simple, it has shown satisfactory precision and can be easily used in maneuvering prediction for this ship type;
(4) From the perspective of quantitative and maneuvering characteristics, the proposed mathematical test method can predict the trend of ship motion with acceptable accuracy.
However, it should be noted that the presented method has certain limitations. The ship’s model is currently designed based on the synchronous mode of two drives. In the near future, further research will be conducted to explore the ship’s model considering the asynchronous mode of two drives, which will take into account the interaction effects between the two drives.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}