
A Probabilistic Methodology for Determining Collision Risk of Marine Animals with Tidal Energy Turbines

 ,
,  ,
, {kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
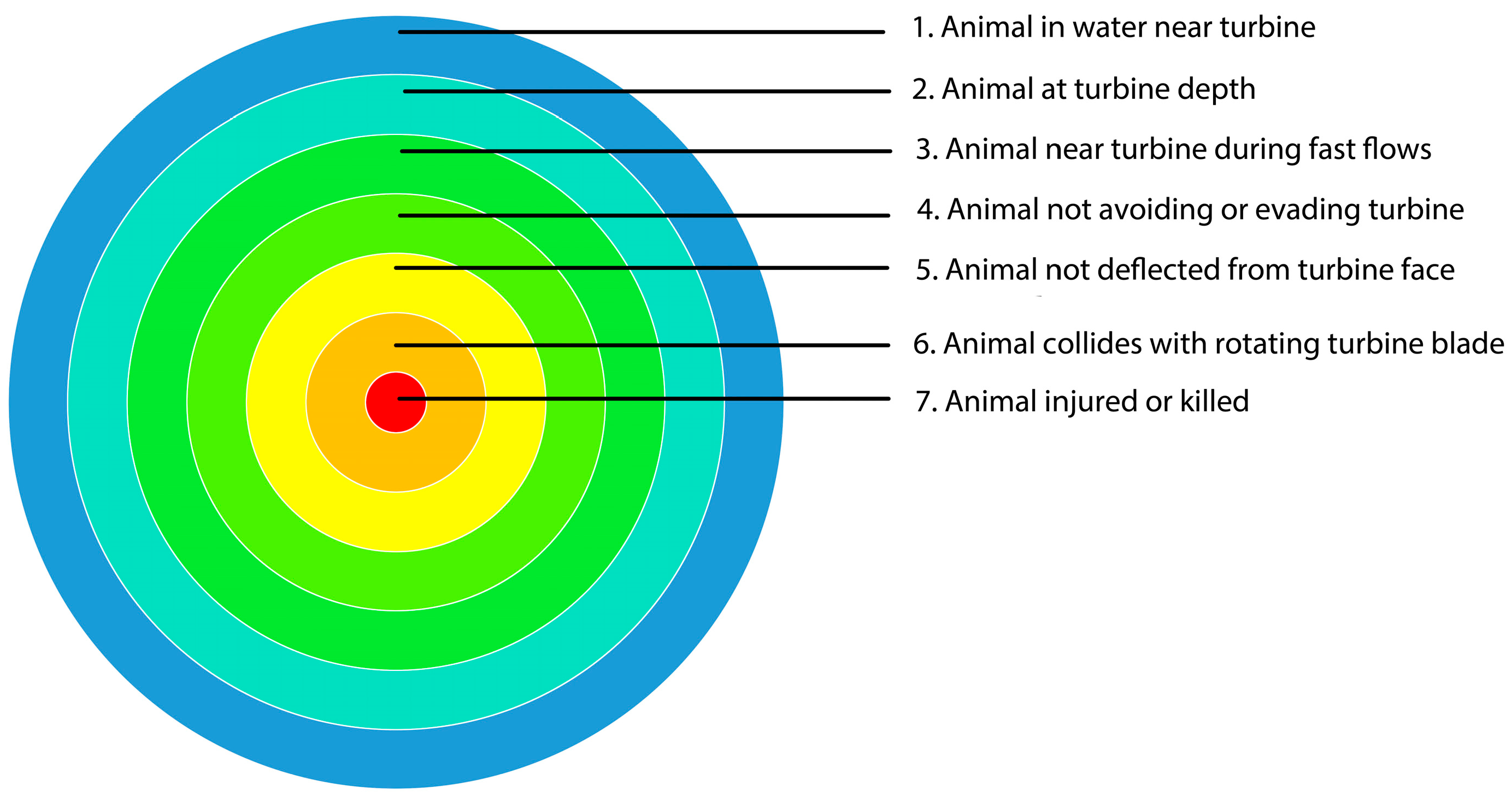
2.1. Conceptual Probabilistic Framework
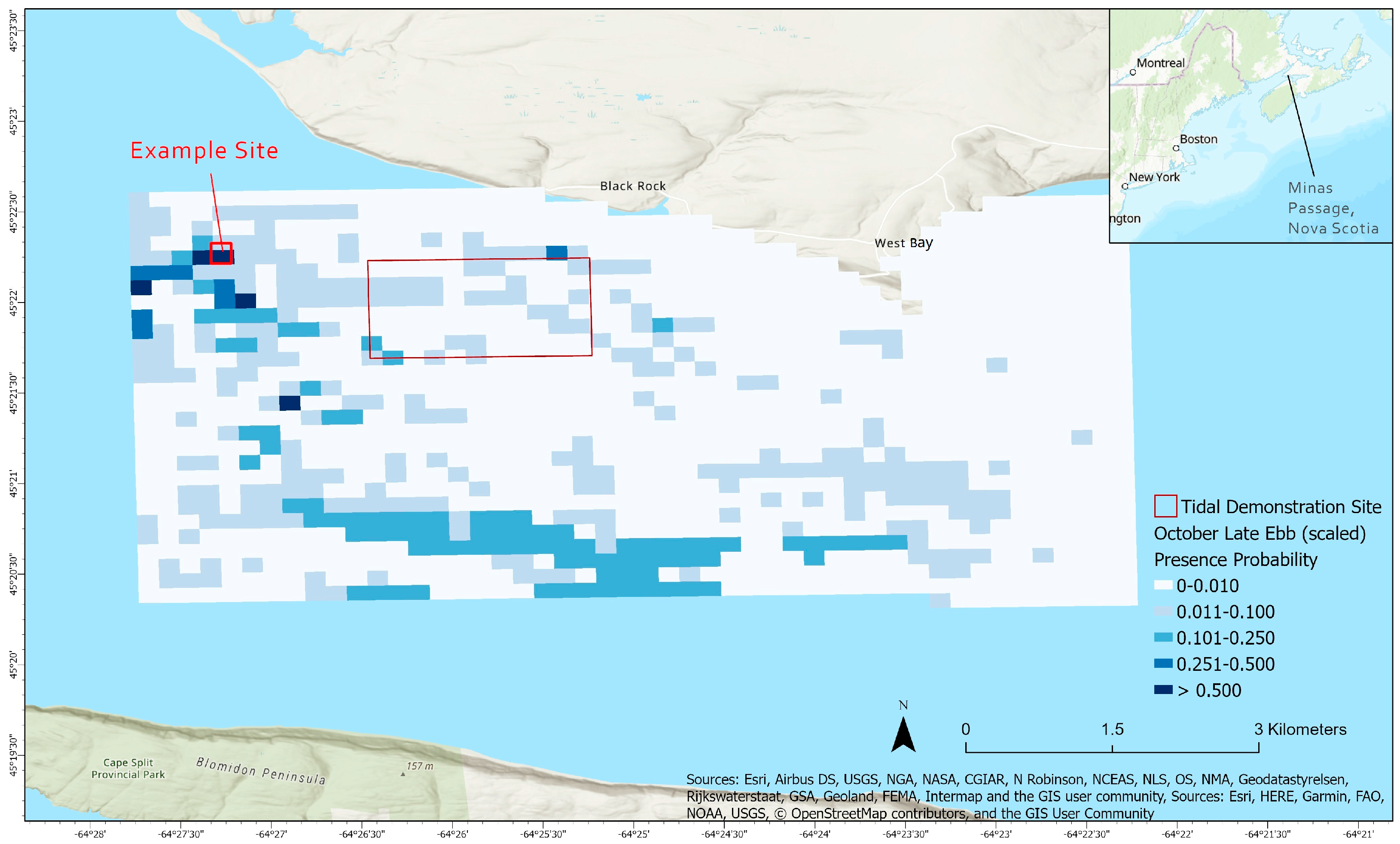
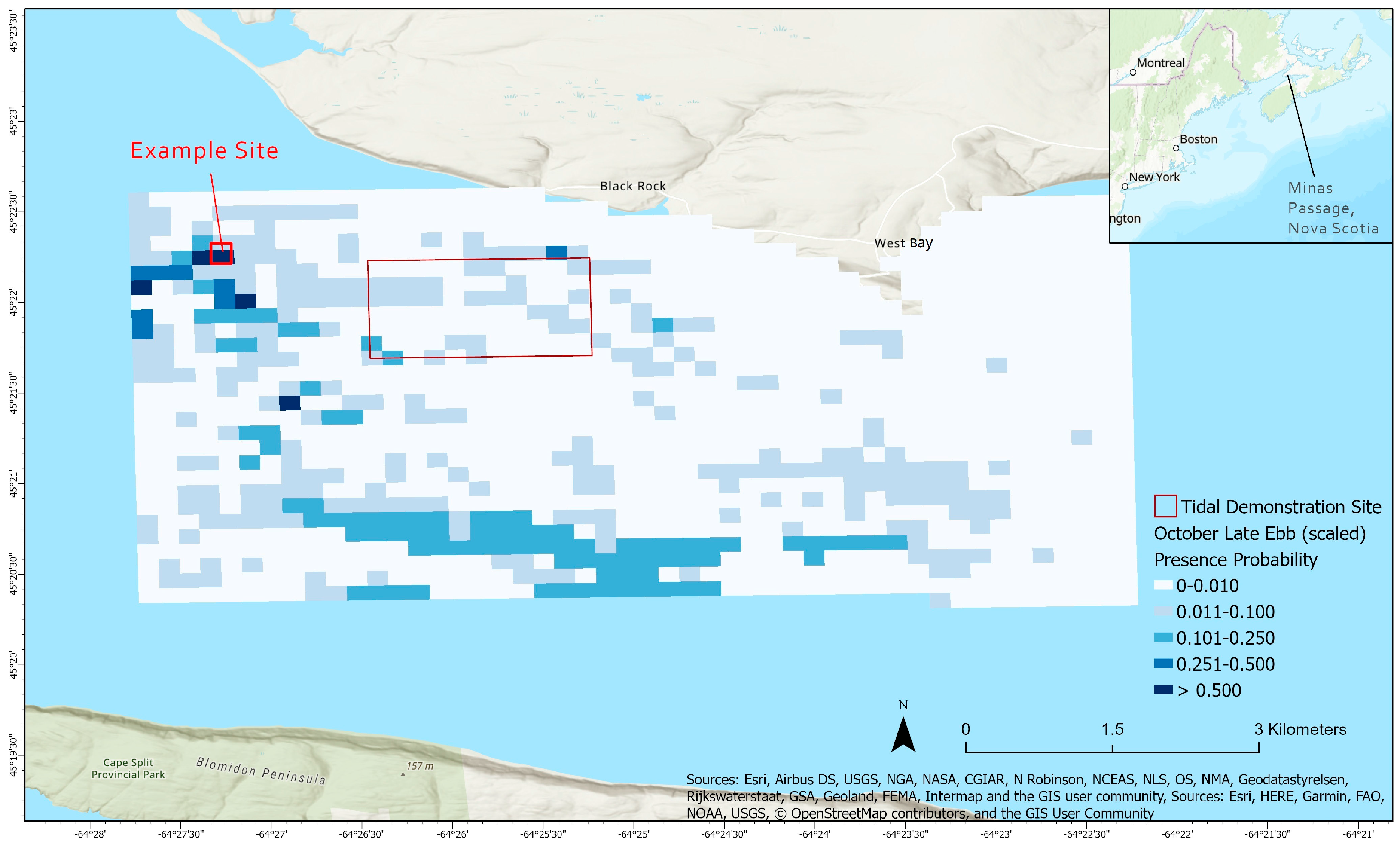
2.2. Case Study
3. Results
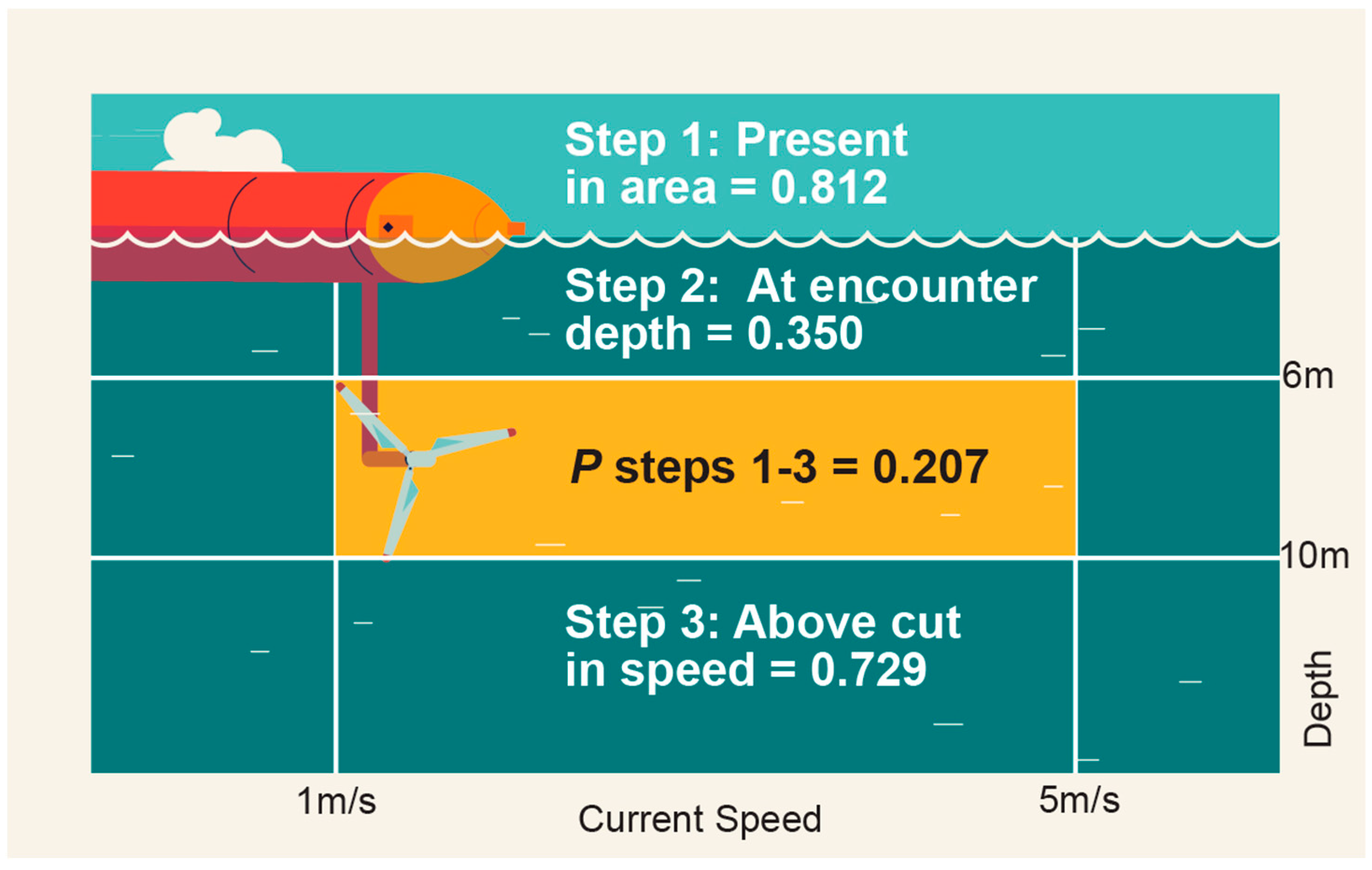
3.1. Probability of Being Present in the Water Column and in Vicinity of the Turbine
3.2. Probability of Being Present at the Depth of the Turbine Rotor
3.3. Probability of Being Present at Flow Rates Greater Than the ‘Cut in’ Speed of the Turbine
3.4. Probability of Not Exhibiting Avoidance or Evasion Behavior
3.5. Probability of Not Being Deflected by the Pressure Generated by the Turbine
3.6. Probability of a Physical Strike with a Turbine Blade
3.7. Probability That Collision Results in Harm (i.e., Critical Injury or Mortality)
3.8. Case Study Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Intergovernmental Panel on Climate Change (IPCC). The Ocean and Cryosphere in a Changing Climate: Special Report of the Intergovernmental Panel on Climate Change, 1st ed.; Cambridge University Press: Cambridge, UK, 2022; ISBN 978-1-00-915796-4. [Google Scholar]
- Intergovernmental Panel on Climate Change (IPCC) (Ed.) Climate Change 2022—Mitigation of Climate Change: Working Group III Contribution to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change, 1st ed.; Cambridge University Press: Cambridge, UK, 2023; ISBN 978-1-00-915792-6. [Google Scholar]
- IRENA. Innovation Outlook: Ocean Energy Technologies; IRENA: Abu Dhabi, United Arab Emirates, 2020; p. 112.
- Malki, R.; Masters, I.; Williams, A.J.; Nick Croft, T. Planning Tidal Stream Turbine Array Layouts Using a Coupled Blade Element Momentum—Computational Fluid Dynamics Model. Renew. Energy 2014, 63, 46–54. [Google Scholar] [CrossRef]
- Vennell, R. The Energetics of Large Tidal Turbine Arrays. Renew. Energy 2012, 48, 210–219. [Google Scholar] [CrossRef]
- European Commission. REPowerEU: Joint European Action for More Affordable, Secure and Sustainable Energy; European Commission: Brussels, Belgium, 2022.
- Coles, D.; Angeloudis, A.; Greaves, D.; Hastie, G.; Lewis, M.; Mackie, L.; McNaughton, J.; Miles, J.; Neill, S.; Piggott, M.; et al. A Review of the UK and British Channel Islands Practical Tidal Stream Energy Resource. Proc. R. Soc. A 2021, 477, 20210469. [Google Scholar] [CrossRef]
- Copping, A.E.; Sather, N.; Hanna, L.; Whiting, J.M.; Zydlewski, G.; Staines, G.; Gill, A.; Hutchison, I.; O’Hagan, A.M.; Simas, T.; et al. Annex IV 2016 State of the Science Report: Environmental Effects of Marine Renewable Energy Development Around the World; Annex IV, Ocean Energy Systems: Seattle, WA, USA, 2016; p. 224. [Google Scholar]
- Kempener, R.; Neumann, F. Tidal Energy Technology Brief; IRENA: Abu Dhabi, United Arab Emirates, 2014.
- Kempener, R.; Neumann, F. Wave Energy Technology Brief; IRENA: Abu Dhabi, United Arab Emirates, 2014.
- Neill, S.P.; Jordan, J.R.; Couch, S.J. Impact of Tidal Energy Converter (TEC) Arrays on the Dynamics of Headland Sand Banks. Renew. Energy 2012, 37, 387–397. [Google Scholar] [CrossRef]
- Copping, A.; Hemery, L. OES-Environmental 2020 State of the Science Report: Environmental Effects of Marine Renewable Energy Development around the World. Report for Ocean Energy Systems (OES); U.S. Department of Energy Office of Scientific and Technical Information: Seattle, WA, USA, 2020.
- Boehlert, G.; McMurray, G.; Tortorici, C.; Klure, J.; Meyer, J. Ecological Effects of Wave Energy Development in the Pacific Northwest; National Oceanic and Atmospheric Administration: Corvallis, OR, USA, 2008; p. 174.
- Boehlert, G.; Gill, A. Environmental and Ecological Effects of Ocean Renewable Energy Development—A Current Synthesis. Oceanography 2010, 23, 68–81. [Google Scholar] [CrossRef]
- Scottish Natural Heritage. Assessing Collision Risk between Underwater Turbines and Marine Wildlife; Scottish Natural Heritage: Edinburgh, UK, 2016; p. 96. [Google Scholar]
- Sparling, C.; Seitz, A.; Masden, E.; Smith, K. 2020 State of the Science Report, Chapter 3: Collision Risk for Animals around Turbines; Pacific Northwest National Laboratory (PNNL): Seattle, WA, USA, 2020.
- Wilson, B.; Batty, R.S.; Daunt, F.; Carter, C. Collision Risks between Marine Renewable Energy Devices and Mammals, Fish and Diving Birds; Report to the Scottish Executive by the Scottish Association for Marine Science: Oban, Scotland, 2006; p. 105. [Google Scholar]
- Hammar, L.; Eggertsen, L.; Andersson, S.; Ehnberg, J.; Arvidsson, R.; Gullström, M.; Molander, S. A Probabilistic Model for Hydrokinetic Turbine Collision Risks: Exploring Impacts on Fish. PLoS ONE 2015, 10, e0117756. [Google Scholar] [CrossRef] [PubMed]
- Horne, N.; Culloch, R.M.; Schmitt, P.; Lieber, L.; Wilson, B.; Dale, A.C.; Houghton, J.D.R.; Kregting, L.T. Collision Risk Modelling for Tidal Energy Devices: A Flexible Simulation-Based Approach. J. Environ. Manag. 2021, 278, 111484. [Google Scholar] [CrossRef]
- Brown, E.; Sulaeman, S.; Quispe-Abad, R.; Müller, N.; Moran, E. Safe Passage for Fish: The Case for in-Stream Turbines. Renew. Sustain. Energy Rev. 2023, 173, 113034. [Google Scholar] [CrossRef]
- Castro-Santos, T.; Haro, A. Survival and Behavioral Effects of Exposure to a Hydrokinetic Turbine on Juvenile Atlantic Salmon and Adult American Shad. Estuaries Coasts 2015, 38, 203–214. [Google Scholar] [CrossRef]
- Amaral, S.V.; Bevelhimer, M.S.; Čada, G.F.; Giza, D.J.; Jacobson, P.T.; McMahon, B.J.; Pracheil, B.M. Evaluation of Behavior and Survival of Fish Exposed to an Axial-Flow Hydrokinetic Turbine. N. Am. J. Fish. Manag. 2015, 35, 97–113. [Google Scholar] [CrossRef]
- Müller, S.; Muhawenimana, V.; Sonnino-Sorisio, G.; Wilson, C.A.M.E.; Cable, J.; Ouro, P. Fish Response to the Presence of Hydrokinetic Turbines as a Sustainable Energy Solution. Sci. Rep. 2023, 13, 7459. [Google Scholar] [CrossRef]
- Bevelhimer, M.; Scherelis, C.; Colby, J.; Adonizio, M.A. Hydroacoustic Assessment of Behavioral Responses by Fish Passing Near an Operating Tidal Turbine in the East River, New York. Trans. Am. Fish. Soc. 2017, 146, 1028–1042. [Google Scholar] [CrossRef]
- Courtney, M.B.; Flanigan, A.J.; Hostetter, M.; Seitz, A.C. Characterizing Sockeye Salmon Smolt Interactions with a Hydrokinetic Turbine in the Kvichak River, Alaska. North Am. J. Fish. Manag. 2022, 42, 1054–1065. [Google Scholar] [CrossRef]
- Bender, A.; Langhamer, O.; Francisco, F.; Forslund, J.; Hammar, L.; Sundberg, J.; Molander, S. Imaging-Sonar Observations of Salmonid Interactions with a Vertical Axis Instream Turbine. River Res. Appl. 2023, 39, 1578–1589. [Google Scholar] [CrossRef]
- Pearson, J.; Roberts, C.; Scott, C.; Hull, S. Collision Risk of Fish with Wave and Tidal Devices; ABP Marine Environmental Research Ltd.: Southampton, UK, 2010; p. 106. [Google Scholar]
- Fraser, S.; Williamson, B.J.; Nikora, V.; Scott, B.E. Fish Distributions in a Tidal Channel Indicate the Behavioural Impact of a Marine Renewable Energy Installation. Energy Rep. 2018, 4, 65–69. [Google Scholar] [CrossRef]
- Gillespie, D.; Palmer, L.; Macaulay, J.; Sparling, C.; Hastie, G. Harbour Porpoises Exhibit Localized Evasion of a Tidal Turbine. Aquat. Conserv. 2021, 31, 2459–2468. [Google Scholar] [CrossRef]
- Joy, R.; Wood, J.D.; Sparling, C.E.; Tollit, D.J.; Copping, A.E.; McConnell, B.J. Empirical Measures of Harbor Seal Behavior and Avoidance of an Operational Tidal Turbine. Mar. Pollut. Bull. 2018, 136, 92–106. [Google Scholar] [CrossRef]
- Onoufriou, J.; Russell, D.J.F.; Thompson, D.; Moss, S.E.; Hastie, G.D. Quantifying the Effects of Tidal Turbine Array Operations on the Distribution of Marine Mammals: Implications for Collision Risk. Renew. Energy 2021, 180, 157–165. [Google Scholar] [CrossRef]
- Viehman, H.A.; Zydlewski, G.B. Fish Interactions with a Commercial-Scale Tidal Energy Device in the Natural Environment. Estuaries Coasts 2015, 38, 241–252. [Google Scholar] [CrossRef]
- Williamson, B.; Fraser, S.; Williamson, L.; Nikora, V.; Scott, B. Predictable Changes in Fish School Characteristics Due to a Tidal Turbine Support Structure. Renew. Energy 2019, 141, 1092–1102. [Google Scholar] [CrossRef]
- Marine Scotland. Survey, Deploy and Monitor Licensing Policy Guidance; Marine Scotland and Scottish Government: Edinburgh, UK, 2012; p. 12.
- Simas, T.; O’Hagan, A.M.; O’Callaghan, J.; Hamawi, S.; Magagna, D.; Bailey, I.; Greaves, D.; Saulnier, J.-B.; Marina, D.; Bald, J.; et al. Review of Consenting Processes for Ocean Energy in Selected European Union Member States. Int. J. Mar. Energy 2015, 9, 41–59. [Google Scholar] [CrossRef]
- Apolonia, M.; Fofack-Garcia, R.; Noble, D.R.; Hodges, J.; Correia da Fonseca, F.X. Legal and Political Barriers and Enablers to the Deployment of Marine Renewable Energy. Energies 2021, 14, 4896. [Google Scholar] [CrossRef]
- Salvador, S.; Ribeiro, M.C. Socio-economic, Legal, and Political Context of Offshore Renewable Energies. WIREs Energy Environ. 2023, 12, e462. [Google Scholar] [CrossRef]
- Stelzenmüller, V.; Coll, M.; Mazaris, A.D.; Giakoumi, S.; Katsanevakis, S.; Portman, M.E.; Degen, R.; Mackelworth, P.; Gimpel, A.; Albano, P.G.; et al. A Risk-Based Approach to Cumulative Effect Assessments for Marine Management. Sci. Total Environ. 2018, 612, 1132–1140. [Google Scholar] [CrossRef]
- Copping, A.; Grear, M.; Jepsen, R.; Chartrand, C.; Gorton, A. Understanding the Potential Risk to Marine Mammals from Collision with Tidal Turbines. Int. J. Mar. Energy 2017, 19, 110–123. [Google Scholar] [CrossRef]
- Whiting, J.; Copping, A.; Freeman, M.; Woodbury, A. Tethys Knowledge Management System: Working to Advance the Marine Renewable Energy Industry. Int. J. Mar. Energy 2019, 2, 29–38. [Google Scholar] [CrossRef]
- Bangley, C.W.; Hasselman, D.J.; Flemming, J.M.; Whoriskey, F.G.; Culina, J.; Enders, L.; Bradford, R.G. Modeling the Probability of Overlap between Marine Fish Distributions and Marine Renewable Energy Infrastructure Using Acoustic Telemetry Data. Front. Mar. Sci. 2022, 9, 851757. [Google Scholar] [CrossRef]
- Sanderson, B.G.; Bangley, C.W.; McGarry, L.P.; Hasselman, D.J. Measuring Detection Efficiency of High-Residency Acoustic Signals for Estimating Probability of Fish–Turbine Encounter in a Fast-Flowing Tidal Passage. J. Mar. Sci. Eng. 2023, 11, 1172. [Google Scholar] [CrossRef]
- MacKenzie, D.I.; Nichols, J.D.; Lachman, G.B.; Droege, S.; Andrew Royle, J.; Langtimm, C.A. Estimating Site Occupancy Rates When Detection Probabilities Are Less than One. Ecology 2002, 83, 2248–2255. [Google Scholar] [CrossRef]
- Long, M.; Jordaan, A.; Castro-Santos, T. Environmental Factors Influencing Detection Efficiency of an Acoustic Telemetry Array and Consequences for Data Interpretation. Anim. Biotelemetry 2023, 11, 18. [Google Scholar] [CrossRef]
- Bevelhimer, M.S.; Pracheil, B.M.; Fortner, A.M.; Saylor, R.; Deck, K.L. Mortality and Injury Assessment for Three Species of Fish Exposed to Simulated Turbine Blade Strike. Can. J. Fish. Aquat. Sci. 2019, 76, 2350–2363. [Google Scholar] [CrossRef]
- Blumara Corporation. Finite Element Analysis to Assess Fish Mortality from Interactions with Tidal Turbine Blades; Offshore Energy Research Association of Nova Scotia: Halifax, NS, Canada, 2018; p. 29. [Google Scholar]
- Elith, J.; Leathwick, J.R. Species Distribution Models: Ecological Explanation and Prediction Across Space and Time. Annu. Rev. Ecol. Evol. Syst. 2009, 40, 677–697. [Google Scholar] [CrossRef]
- Benjamins, S.; Van Geel, N.; Hastie, G.; Elliott, J.; Wilson, B. Harbour Porpoise Distribution Can Vary at Small Spatiotemporal Scales in Energetic Habitats. Deep Sea Res. Part II Top. Stud. Oceanogr. 2017, 141, 191–202. [Google Scholar] [CrossRef]
- Lieber, L.; Nimmo-Smith, W.A.M.; Waggitt, J.J.; Kregting, L. Fine-Scale Hydrodynamic Metrics Underlying Predator Occupancy Patterns in Tidal Stream Environments. Ecol. Indic. 2018, 94, 397–408. [Google Scholar] [CrossRef]
- Waggitt, J.J.; Robbins, A.M.C.; Wade, H.M.; Masden, E.A.; Furness, R.W.; Jackson, A.C.; Scott, B.E. Comparative Studies Reveal Variability in the Use of Tidal Stream Environments by Seabirds. Mar. Policy 2017, 81, 143–152. [Google Scholar] [CrossRef]
- McLean, M.; Sanderson, B.; Lilly, J.; Tsitrin, E.; Stokesbury, M. Quantifying Fish-Turbine Interactions Using VEMCO’s New High Residency Acoustic Electronic Tagging Technology; Offshore Energy Research Association of Nova Scotia: Halifax, NS, Canada, 2019; p. 126. [Google Scholar]
- Stokesbury, M.; McLean, M. Survival, Distribution and Environmental Preferences of Atlantic Salmon Smolts. Final Report—Annex C; Offshore Energy Research Association of Nova Scotia: Halifax, NS, Canada, 2020; p. 42. [Google Scholar]
- Sanderson, B.G.; Karsten, R.H.; Hasselman, D.J. Towards Estimating Probability of Fish–Turbine Encounter: Using Drifters Equipped with Acoustic Tags to Verify the Efficacy of an Array of Acoustic Receivers. JMSE 2023, 11, 1592. [Google Scholar] [CrossRef]
- Gillespie, D.; Palmer, L.; Macaulay, J.; Sparling, C.; Hastie, G. Passive Acoustic Methods for Tracking the 3D Movements of Small Cetaceans around Marine Structures. PLoS ONE 2020, 15, e0229058. [Google Scholar] [CrossRef]
- Porskamp, P.; Redden, A.M.; Broome, J.E.; Sanderson, B.; Wood, J. Assessing Marine Mammal Presence in and near the FORCE Lease Area during Winter and Early Spring—Addressing Baseline Data Gaps and Sensor Performance; Offshore Energy Research Association and the Fundy Ocean Research Center for Energy: Halifax, NS, Canada, 2015; p. 35. [Google Scholar]
- Hastie, G.D.; Wu, G.-M.; Moss, S.; Jepp, P.; MacAulay, J.; Lee, A.; Sparling, C.E.; Evers, C.; Gillespie, D. Automated Detection and Tracking of Marine Mammals: A Novel Sonar Tool for Monitoring Effects of Marine Industry. Aquat. Conserv. Mar. Freshw. Ecosyst. 2019, 29, 119–130. [Google Scholar] [CrossRef]
- Parsons, M.J.G.; Fenny, E.; Lucke, K.; Osterrieder, S.; Jenkins, G.; Saunders, B.J.; Jepp, P.; Parnum, I.M. Imaging Marine Fauna with a Tritech Gemini 720i Sonar. Acoust. Aust. 2017, 45, 41–49. [Google Scholar] [CrossRef]
- Sparling, C.; Lonergan, M.; McConnell, B. Harbour Seals (Phoca vitulina) around an Operational Tidal Turbine in Strangford Narrows: No Barrier Effect but Small Changes in Transit Behaviour. Aquat. Conserv. Mar. Freshw. Ecosyst. 2018, 28, 194–204. [Google Scholar] [CrossRef]
- Hutchison, I.; Tait, C.; Sheehy, J.; Morgan, P. Review of Underwater Video Data Collected around Operating Tidal Stream Turbines; NatureScot: Perth, Scotland, UK, 2020. [Google Scholar]
- Smith, K. Shetland Tidal Array Subsea Video Monitoring Report: Subsea Video Monitoring; NOVA Innovation: Edinburgh, UK, 2021; p. 76. [Google Scholar]
- Hodgson, J.C.; Mott, R.; Baylis, S.M.; Pham, T.T.; Wotherspoon, S.; Kilpatrick, A.D.; Raja Segaran, R.; Reid, I.; Terauds, A.; Koh, L.P. Drones Count Wildlife More Accurately and Precisely than Humans. Methods Ecol. Evol. 2018, 9, 1160–1167. [Google Scholar] [CrossRef]
- Shen, H.; Zydlewski, G.B.; Viehman, H.A.; Staines, G. Estimating the Probability of Fish Encountering a Marine Hydrokinetic Device. Renew. Energy 2016, 97, 746–756. [Google Scholar] [CrossRef]
- Staines, G.; Zydlewski, G.B.; Viehman, H.A.; Kocik, R. Applying Two Active Acoustic Technologies to Document Presence of Large Marine Animal Targets at a Marine Renewable Energy Site. J. Mar. Sci. Eng. 2020, 8, 704. [Google Scholar] [CrossRef]
- Melvin, G.D.; Cochrane, N.A. Multibeam Acoustic Detection of Fish and Water Column Targets at High-Flow Sites. Estuaries Coasts 2015, 38, 227–240. [Google Scholar] [CrossRef]
- Staines, G.J.; Mueller, R.P.; Seitz, A.C.; Evans, M.D.; O’Byrne, P.W.; Wosnik, M. Capabilities of an Acoustic Camera to Inform Fish Collision Risk with Current Energy Converter Turbines. JMSE 2022, 10, 483. [Google Scholar] [CrossRef]
- Cotter, E.; Staines, G. Observing Fish Interactions with Marine Energy Turbines Using Acoustic Cameras. Fish. Fish. 2023, 24, 1020–1033. [Google Scholar] [CrossRef]
- Francisco, F.; Sundberg, J. Detection of Visual Signatures of Marine Mammals and Fish within Marine Renewable Energy Farms Using Multibeam Imaging Sonar. JMSE 2019, 7, 22. [Google Scholar] [CrossRef]
- Tsitrin, E.; Sanderson, B.G.; McLean, M.F.; Gibson, A.J.F.; Hardie, D.C.; Stokesbury, M.J.W. Migration and Apparent Survival of Post-Spawning Alewife (Alosa pseudoharengus) in Minas Basin, Bay of Fundy. Anim. Biotelemetry 2022, 10, 11. [Google Scholar] [CrossRef]
- Hemery, L.G.; Mackereth, K.F.; Gunn, C.M.; Pablo, E.B. Use of a 360-Degree Underwater Camera to Characterize Artificial Reef and Fish Aggregating Effects around Marine Energy Devices. JMSE 2022, 10, 555. [Google Scholar] [CrossRef]
- Polagye, B.; Joslin, J.; Murphy, P.; Cotter, E.; Scott, M.; Gibbs, P.; Bassett, C.; Stewart, A. Adaptable Monitoring Package Development and Deployment: Lessons Learned for Integrated Instrumentation at Marine Energy Sites. JMSE 2020, 8, 553. [Google Scholar] [CrossRef]
- Au, D.; Weihs, D. At High Speeds Dolphins Save Energy by Leaping. Nature 1980, 284, 548–550. [Google Scholar] [CrossRef]
- McCann, D.L.; Bell, P.S. Observations and Tracking of Killer Whales (Orcinus orca) with Shore-Based X-Band Marine Radar at a Marine Energy Test Site. Mar. Mam. Sci. 2017, 33, 904–912. [Google Scholar] [CrossRef]
- Linnenschmidt, M.; Teilmann, J.; Akamatsu, T.; Dietz, R.; Miller, L.A. Biosonar, Dive, and Foraging Activity of Satellite Tracked Harbor Porpoises (Phocoena phocoena). Mar. Mam. Sci. 2013, 29, E77–E97. [Google Scholar] [CrossRef]
- Westgate, A.J.; Head, A.J.; Berggren, P.; Koopman, H.N.; Gaskin, D.E. Diving Behaviour of Harbour Porpoises, Phocoena phocoena. Can. J. Fish. Aquat. Sci. 1995, 52, 1064–1073. [Google Scholar] [CrossRef]
- MacAulay, J.D.J.; Gordon, J.C.D.; Gillespie, D.M.; Malinka, C.E.; Johnson, M.; Northridge, S.P. Tracking Harbor Porpoises in Tidal Rapids: A Low Cost Autonomous Platform to Track the Movement of Harbor Porpoises in Tidal Rapids. NERC. 2015. Available online: http://www.smru.st-and.ac.uk/documents/nerc/NERC_MRE_KEP_Tracking_Harbour_Porpoises_in_Tidal_Rapids.pdf (accessed on 20 September 2023).
- Keyser, F.M.; Broome, J.E.; Bradford, R.G.; Sanderson, B.; Redden, A.M. Winter Presence and Temperature-Related Diel Vertical Migration of Striped Bass (Morone saxatilis) in an Extreme High-Flow Passage in the Inner Bay of Fundy. Can. J. Fish. Aquat. Sci. 2016, 73, 1777–1786. [Google Scholar] [CrossRef]
- Scherelis, C.; Penesis, I.; Hemer, M.A.; Cossu, R.; Wright, J.T.; Guihen, D. Investigating Biophysical Linkages at Tidal Energy Candidate Sites: A Case Study for Combining Environmental Assessment and Resource Characterisation. Renew. Energy 2020, 159, 399–413. [Google Scholar] [CrossRef]
- Whitton, T.A.; Jackson, S.E.; Hiddink, J.G.; Scoulding, B.; Bowers, D.; Powell, B.; D’Urban Jackson, T.; Gimenez, L.; Davies, A.G. Vertical Migrations of Fish Schools Determine Overlap with a Mobile Tidal Stream Marine Renewable Energy Device. J. Appl. Ecol. 2020, 57, 729–741. [Google Scholar] [CrossRef]
- Viehman, H.; Boucher, T.; Redden, A. Winter and Summer Differences in Probability of Fish Encounter (Spatial Overlap) with MHK Devices. Int. Mar. Energy J. 2018, 1, 9–18. [Google Scholar] [CrossRef]
- Isaksson, N.; Cleasby, I.R.; Owen, E.; Williamson, B.J.; Houghton, J.D.R.; Wilson, J.; Masden, E.A. The Use of Animal-Borne Biologging and Telemetry Data to Quantify Spatial Overlap of Wildlife with Marine Renewables. J. Mar. Sci. Eng. 2021, 9, 263. [Google Scholar] [CrossRef]
- Laplanche, C.; Marques, T.A.; Thomas, L. Tracking Marine Mammals in 3D Using Electronic Tag Data. Methods Ecol. Evol. 2015, 6, 987–996. [Google Scholar] [CrossRef]
- Papastavrou, V.; Ryan, C. Ethical Standards for Research on Marine Mammals. Res. Ethics 2023, 19, 390–408. [Google Scholar] [CrossRef]
- Langård, L.; Skaret, G.; Jensen, K.; Johannessen, A.; Slotte, A.; Nøttestad, L.; Fernö, A. Tracking Individual Herring within a Semi-Enclosed Coastal Marine Ecosystem: 3-Dimensional Dynamics from Pre- to Post-Spawning. Mar. Ecol. Prog. Ser. 2015, 518, 267–279. [Google Scholar] [CrossRef]
- Deng, Z.D.; Weiland, M.A.; Fu, T.; Seim, T.A.; LaMarche, B.L.; Choi, E.Y.; Carlson, T.J.; Eppard, M.B. A Cabled Acoustic Telemetry System for Detecting and Tracking Juvenile Salmon: Part 2. Three-Dimensional Tracking and Passage Outcomes. Sensors 2011, 11, 5661–5676. [Google Scholar] [CrossRef] [PubMed]
- McMichael, G.A.; Eppard, M.B.; Carlson, T.J.; Carter, J.A.; Ebberts, B.D.; Brown, R.S.; Weiland, M.; Ploskey, G.R.; Harnish, R.A.; Deng, Z.D. The Juvenile Salmon Acoustic Telemetry System: A New Tool. Fisheries 2010, 35, 9–22. [Google Scholar] [CrossRef]
- Kubečka, J.; Godø, O.R.; Hickley, P.; Prchalová, M.; Říha, M.; Rudstam, L.; Welcomme, R. Fish Sampling with Active Methods. Fish. Res. 2012, 123–124, 1–3. [Google Scholar] [CrossRef]
- CEF Consultants Ltd. Report on a Workshop on Fish Behaviour in Response to Seismic Sound Held in Halifax, Nova Scotia, Canada March 28–31, 2011; Environmental Studies Research Funds: Ottawa, ON, Canada, 2011; p. 109. [Google Scholar]
- Brylinski, M. Results of a Study to Evaluate the Feasibility of Using a Drifted Gill Net to Survey Fish Species Present in the Minas Passage, Bay of Fundy; Acadia Centre for Estuarine Research: Wolfville, NS, Canada, 2010; p. 4. [Google Scholar]
- Urmy, S.S.; Horne, J.K. Multi-Scale Responses of Scattering Layers to Environmental Variability in Monterey Bay, California. Deep Sea Res. Part I Oceanogr. Res. Pap. 2016, 113, 22–32. [Google Scholar] [CrossRef]
- Viehman, H.A.; Hasselman, D.J.; Douglas, J.; Boucher, T. The Ups and Downs of Using Active Acoustic Technologies to Study Fish at Tidal Energy Sites. Front. Mar. Sci. 2022, 9, 851400. [Google Scholar] [CrossRef]
- Staines, G.; Zydlewski, G.; Viehman, H. Changes in Relative Fish Density around a Deployed Tidal Turbine during On-Water Activities. Sustainability 2019, 11, 6262. [Google Scholar] [CrossRef]
- Gillespie, D.; Oswald, M.; Hastie, G.; Sparling, C. Marine Mammal HiCUP: A High Current Underwater Platform for the Long-Term Monitoring of Fine-Scale Marine Mammal Behavior Around Tidal Turbines. Front. Mar. Sci. 2022, 9, 850446. [Google Scholar] [CrossRef]
- Ouro, P.; Dené, P.; Garcia-Novo, P.; Stallard, T.; Kyozuda, Y.; Stansby, P. Power Density Capacity of Tidal Stream Turbine Arrays with Horizontal and Vertical Axis Turbines. J. Ocean Eng. Mar. Energy 2023, 9, 203–218. [Google Scholar] [CrossRef]
- Lewis, M.; O’Hara Murray, R.; Fredriksson, S.; Maskell, J.; De Fockert, A.; Neill, S.P.; Robins, P.E. A Standardised Tidal-Stream Power Curve, Optimised for the Global Resource. Renew. Energy 2021, 170, 1308–1323. [Google Scholar] [CrossRef]
- Xu, W.; Matzner, S. Underwater Fish Detection Using Deep Learning for Water Power Applications. In Proceedings of the 2018 International Conference on Computational Science and Computational Intelligence (CSCI), Las Vegas, NV, USA, 12–14 December 2018. [Google Scholar]
- Williamson, B.J.; Blondel, P.; Armstrong, E.; Bell, P.S.; Hall, C.; Waggitt, J.J. Scott A Self-Contained Subsea Platform for Acoustic Monitoring of the Environment Around Marine Renewable Energy Devices–Field Deployments at Wave and Tidal Energy Sites in Orkney, Scotland. IEEE J. Ocean. Eng. 2016, 41, 67–81. [Google Scholar] [CrossRef]
- Broadhurst, M.; Barr, S.; Orme, C.D.L. In-Situ Ecological Interactions with a Deployed Tidal Energy Device; an Observational Pilot Study. Ocean Coast. Manag. 2014, 99, 31–38. [Google Scholar] [CrossRef]
- Coombs, S.; Bak-Coleman, J.; Montgomery, J. Rheotaxis Revisited: A Multi-Behavioral and Multisensory Perspective on How Fish Orient to Flow. J. Exp. Biol. 2020, 223, jeb223008. [Google Scholar] [CrossRef] [PubMed]
- Webb, P.W. Entrainment by River Chub Nocomis Micropogon and Smallmouth Bass Micropterus Dolomieu on Cylinders. J. Exp. Biol. 1998, 201 Pt 16, 2403–2412. [Google Scholar] [CrossRef]
- Parker, S.J.; McCleave, J.D. Selective Tidal Stream Transport by American Eels during Homing Movements and Estuarine Migration. J. Mar. Biol. Assoc. UK 1997, 77, 871–889. [Google Scholar] [CrossRef]
- Gibson, R.N. Go with the Flow: Tidal Migration in Marine Animals. Hydrobiologia 2003, 503, 153–161. [Google Scholar] [CrossRef]
- Benjamins, S.; Dale, A.; Hastie, G.; Waggitt, J.; Lea, M.-A.; Scott, B.; Wilson, B. Confusion Reigns? A Review of Marine Megafauna Interactions with Tidal-Stream Environments. In Oceanography and Marine Biology; Hughes, R., Hughes, D., Smith, I., Dale, A., Eds.; Oceanography and Marine Biology—An Annual Review; University of Aberdeen: Aberdeen, UK, 2015; pp. 1–54. ISBN 978-1-4987-0545-5. [Google Scholar]
- Palmer, L.; Gillespie, D.; MacAulay, J.D.J.; Sparling, C.E.; Russell, D.J.F.; Hastie, G.D. Harbour Porpoise (Phocoena phocoena) Presence Is Reduced during Tidal Turbine Operation. Aquat. Conserv. Mar. Freshw. Ecosyst. 2021, 31, 3543–3553. [Google Scholar] [CrossRef]
- Davies, K.T.A.; Brillant, S.W. Mass Human-Caused Mortality Spurs Federal Action to Protect Endangered North Atlantic Right Whales in Canada. Mar. Policy 2019, 104, 157–162. [Google Scholar] [CrossRef]
- Hastie, G.D.; Russell, D.J.F.; Lepper, P.; Elliott, J.; Wilson, B.; Benjamins, S.; Thompson, D. Harbour Seals Avoid Tidal Turbine Noise: Implications for Collision Risk. J. Appl. Ecol. 2018, 55, 684–693. [Google Scholar] [CrossRef]
- Fraser, S.; Waggitt, J.J. Practical Approaches for Providing Empirical Data on Seabird Behavior and Prey Assemblages in Tidal Channels. Front. Mar. Sci. 2022, 9, 851476. [Google Scholar] [CrossRef]
- Yoshida, T.; Zhou, J.; Park, S.; Muto, H.; Kitazawa, D. Use of a Model Turbine to Investigate the High Striking Risk of Fish with Tidal and Oceanic Current Turbine Blades under Slow Rotational Speed. Sustain. Energy Technol. Assess. 2020, 37, 100634. [Google Scholar] [CrossRef]
- Yoshida, T.; Furuichi, D.; Williamson, B.J.; Zhou, J.; Dong, S.; Li, Q.; Kitazawa, D. Experimental Study of Fish Behavior near a Tidal Turbine Model under Dark Conditions. J. Mar. Sci. Technol. 2022, 27, 541–548. [Google Scholar] [CrossRef]
- Hammar, L.; Andersson, S.; Eggertsen, L.; Haglund, J.; Gullström, M.; Ehnberg, J.; Molander, S. Hydrokinetic Turbine Effects on Fish Swimming Behaviour. PLoS ONE 2013, 8, e84141. [Google Scholar] [CrossRef] [PubMed]
- Viehman, H.A.; Zydlewski, G.B.; McCleave, J.D.; Staines, G.J. Using Hydroacoustics to Understand Fish Presence and Vertical Distribution in a Tidally Dynamic Region Targeted for Energy Extraction. Estuaries Coasts 2015, 38, 215–226. [Google Scholar] [CrossRef]
- Jacobson, P.; Amaral, S.V.; Castro-Santos, T.; Giza, D.J.; Haro, A.; Perkins, N.; Pioppi, N. Environmental Effects of Hydrokinetic Turbines on Fish: Desktop and Laboratory Flume Studies; Electric Power Research Institute (EPRI): Palo Alto, CA, USA, 2012. [Google Scholar]
- Schweizer, P.; Cada, G.; Bevelhimer, M. Laboratory Experiments on the Effects of Blade Strike from Hydrokinetic Energy Technologies on Larval and Juvenile Freshwater Fishes; Oak Ridge National Laboratory (ORNL): Oak Ridge, TN, USA, 2012. [Google Scholar]
- Bevelhimer, M.; Colby, J.; Adonizio, M.; Tomichek, C.; Scherelis, C. Informing a Tidal Turbine Strike Probability Model through Characterization of Fish Behavioral Response Using Multibeam Sonar Output; Oak Ridge National Laboratory (ORNL): Oak Ridge, TN, USA, 2016. [Google Scholar]
- Betz, A. Introduction to the Theory of Flow Machines, 1st ed.; Pergamon Press: London, UK, 1966; ISBN 978-1-4831-8090-8. [Google Scholar]
- Garrett, C.; Cummins, P. The Efficiency of a Turbine in a Tidal Channel. J. Fluid. Mech. 2007, 588, 243–251. [Google Scholar] [CrossRef]
- Nishino, T.; Willden, R.H.J. Two-Scale Dynamics of Flow Past a Partial Cross-Stream Array of Tidal Turbines. J. Fluid. Mech. 2013, 730, 220–244. [Google Scholar] [CrossRef]
- Draper, S.; Nishino, T. Centred and Staggered Arrangements of Tidal Turbines. J. Fluid. Mech. 2014, 739, 72–93. [Google Scholar] [CrossRef]
- Du Feu, R.J.; Funke, S.W.; Kramer, S.C.; Hill, J.; Piggott, M.D. The Trade-off between Tidal-Turbine Array Yield and Environmental Impact: A Habitat Suitability Modelling Approach. Renew. Energy 2019, 143, 390–403. [Google Scholar] [CrossRef]
- Copping, A.E.; Grear, M.E. Applying a Simple Model for Estimating the Likelihood of Collision of Marine Mammals with Tidal Turbines. Int. Mar. Energy J. 2018, 1, 27–33. [Google Scholar] [CrossRef]
- Manwell, J.F.; McGowan, J.G.; Rogers, A.L. Wind Energy Explained: Theory, Design and Application, 2nd ed.; Wiley: Chichester, UK, 2009; ISBN 978-0-470-01500-1. [Google Scholar]
- Remen, M.; Solstorm, F.; Bui, S.; Klebert, P.; Vågseth, T.; Solstorm, D.; Hvas, M.; Oppedal, F. Critical Swimming Speed in Groups of Atlantic Salmon Salmo Salar. Aquacult. Environ. Interact. 2016, 8, 659–664. [Google Scholar] [CrossRef]
- Johansson, D.; Laursen, F.; Fernö, A.; Fosseidengen, J.E.; Klebert, P.; Stien, L.H.; Vågseth, T.; Oppedal, F. The Interaction between Water Currents and Salmon Swimming Behaviour in Sea Cages. PLoS ONE 2014, 9, e97635. [Google Scholar] [CrossRef] [PubMed]
- Viehman, H.A.; Zydlewski, G.B. Multi-Scale Temporal Patterns in Fish Presence in a High-Velocity Tidal Channel. PLoS ONE 2017, 12, e0176405. [Google Scholar] [CrossRef]
- Liao, J.C. A Review of Fish Swimming Mechanics and Behaviour in Altered Flows. Phil. Trans. R. Soc. B 2007, 362, 1973–1993. [Google Scholar] [CrossRef]
- Hecker, G.E.; Amaral, S.V. Turbine Blade Shape Favorable for Fish Survival; Electric Power Research Institute: Palo Alto, CA, USA, 2008; p. 94. [Google Scholar]
- Lane, D. A Framework for Risk Analysis in Fisheries Decision-Making. ICES J. Mar. Sci. 1998, 55, 1–13. [Google Scholar] [CrossRef]
- Peraza, J.; Horne, J. A Conditional Probabilistic Encounter-Impact Model for Fish-Turbine Interactions. In Proceedings of the European Wave and Tidal Energy Conference, Bilbao, Spain, 3–7 September 2023; Volume 15. [Google Scholar] [CrossRef]
- Copping, A.E.; Hemery, L.G.; Overhus, D.M.; Garavelli, L.; Freeman, M.C.; Whiting, J.M.; Gorton, A.M.; Farr, H.K.; Rose, D.J.; Tugade, L.G. Potential Environmental Effects of Marine Renewable Energy Development—The State of the Science. J. Mar. Sci. Eng. 2020, 8, 879. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Copping, A.E.; Hasselman, D.J.; Bangley, C.W.; Culina, J.; Carcas, M. A Probabilistic Methodology for Determining Collision Risk of Marine Animals with Tidal Energy Turbines. J. Mar. Sci. Eng. 2023, 11, 2151. https://doi.org/10.3390/jmse11112151
Copping AE, Hasselman DJ, Bangley CW, Culina J, Carcas M. A Probabilistic Methodology for Determining Collision Risk of Marine Animals with Tidal Energy Turbines. Journal of Marine Science and Engineering. 2023; 11(11):2151. https://doi.org/10.3390/jmse11112151
Chicago/Turabian StyleCopping, Andrea E., Daniel J. Hasselman, Charles W. Bangley, Joel Culina, and Max Carcas. 2023. "A Probabilistic Methodology for Determining Collision Risk of Marine Animals with Tidal Energy Turbines" Journal of Marine Science and Engineering 11, no. 11: 2151. https://doi.org/10.3390/jmse11112151
APA StyleCopping, A. E., Hasselman, D. J., Bangley, C. W., Culina, J., & Carcas, M. (2023). A Probabilistic Methodology for Determining Collision Risk of Marine Animals with Tidal Energy Turbines. Journal of Marine Science and Engineering, 11(11), 2151. https://doi.org/10.3390/jmse11112151