
A Virtual System and Method for Autonomous Navigation Performance Testing of Unmanned Surface Vehicles



Abstract
:1. Introduction
2. The Framework for a Virtual Testing System of the Autonomous Navigation Performance
2.1. Key Requirements Analysis for the Virtual Testing of Autonomous Navigation Performance
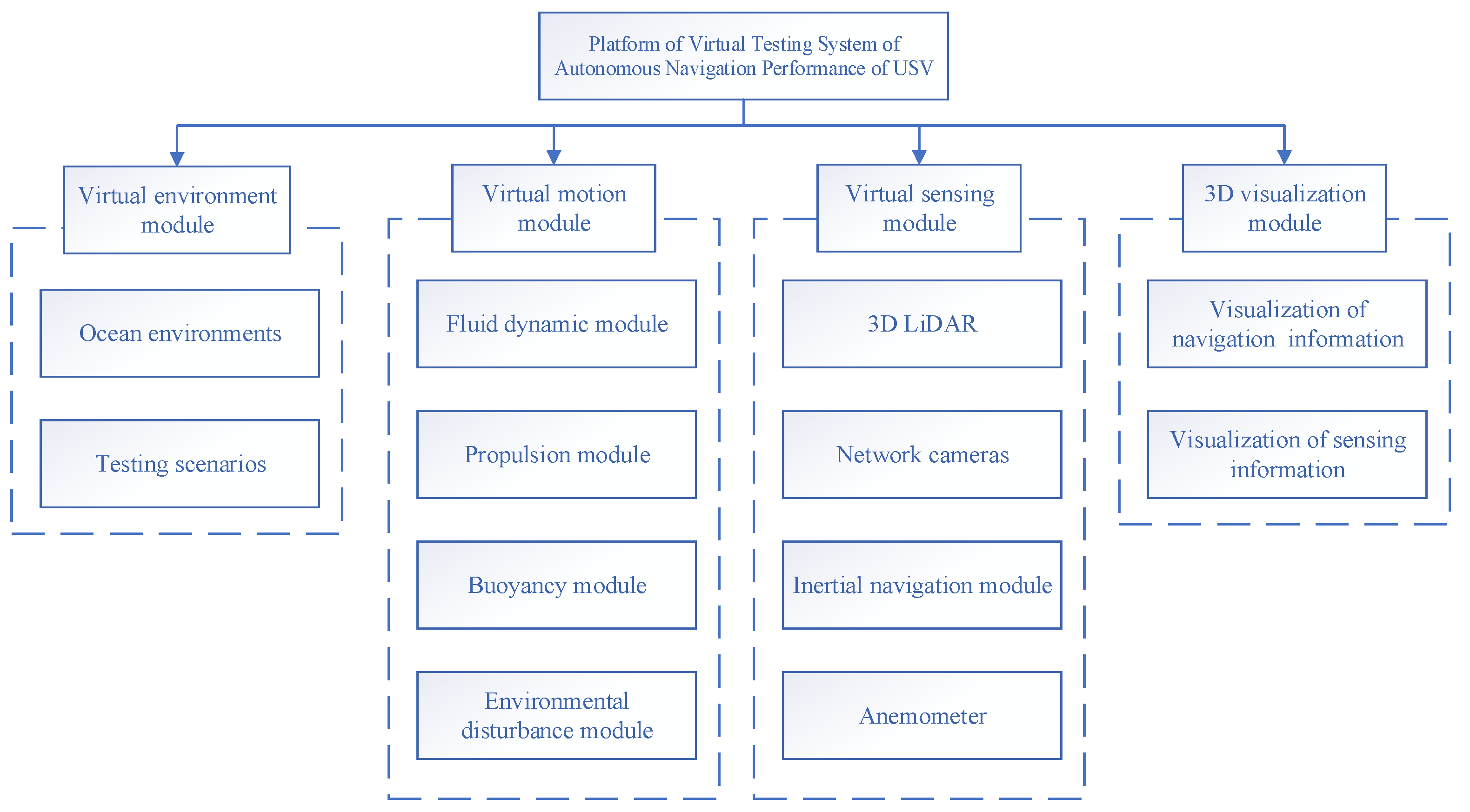
2.2. Design of the Framework for the Virtual Testing System
3. Establishment of the Virtual Testing System
3.1. Design of the Framework for the Virtual Testing System
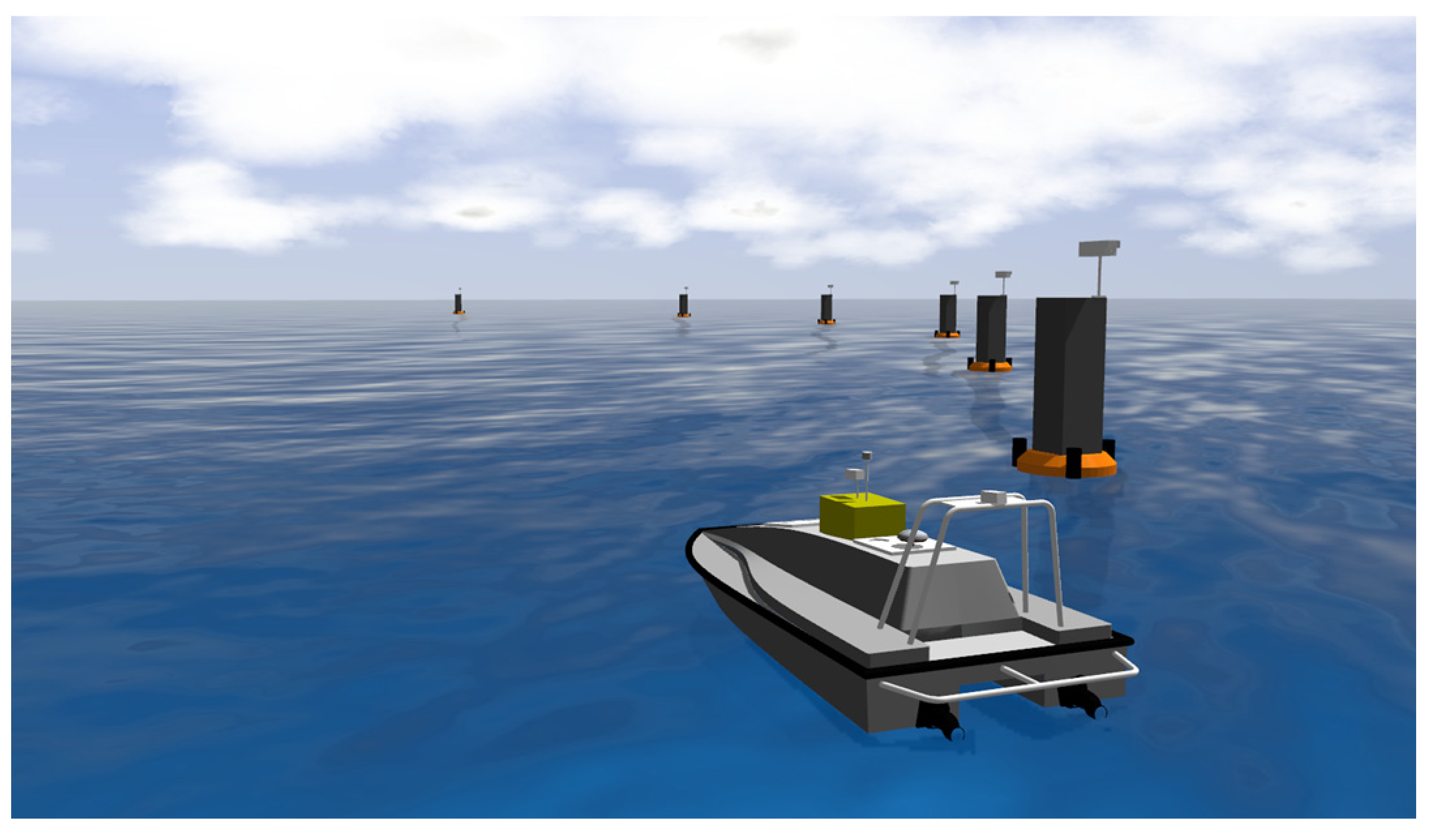
3.2. Generation of the Navigation World of USVs
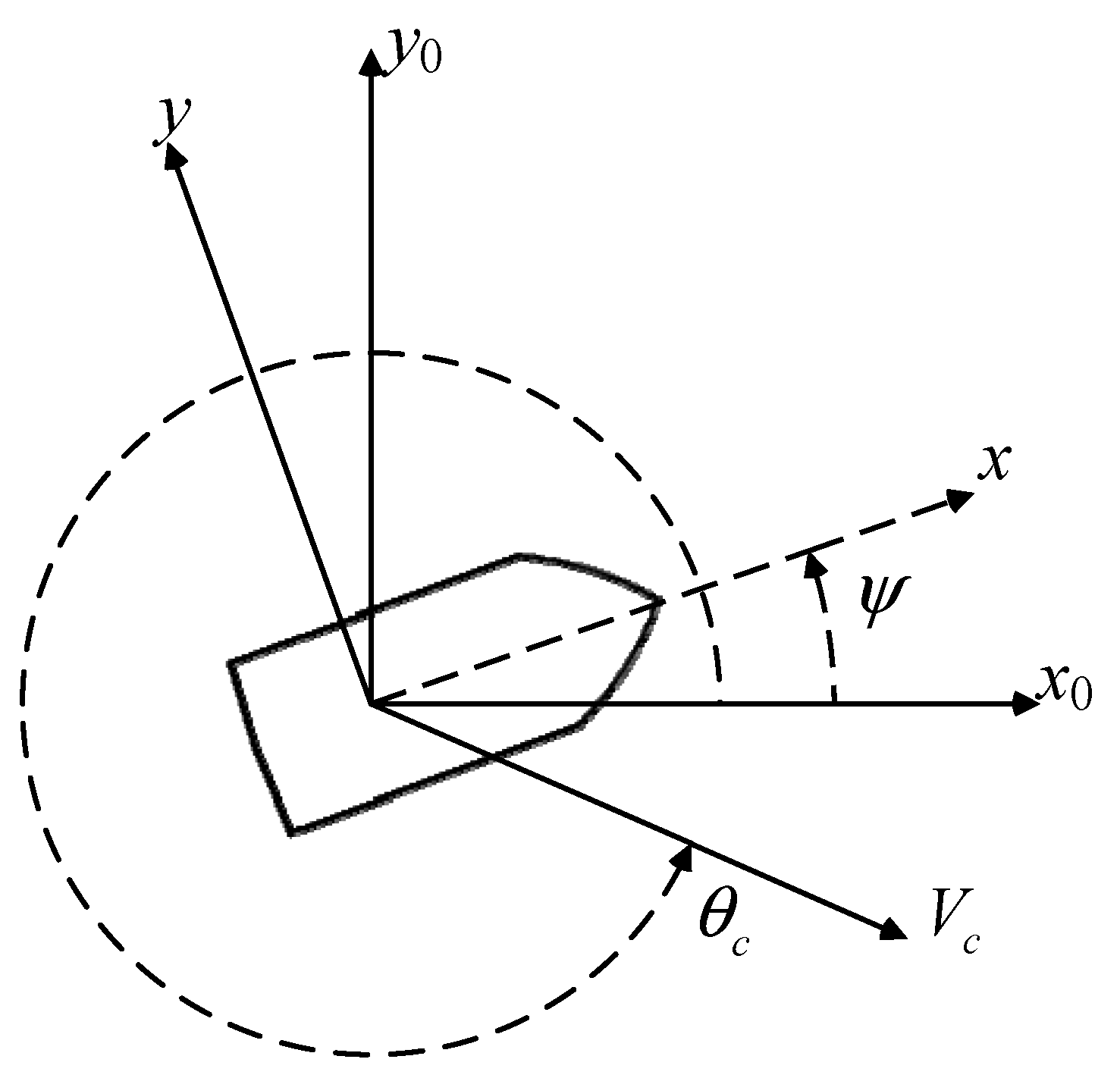
3.3. The Virtual Motion Module of USVs
3.3.1. Fluid Dynamic Module
3.3.2. Buoyancy Module
3.3.3. Environmental Disturbance Module
3.4. Virtual Sensor Module
3.4.1. Motion Sensors Module
3.4.2. Surrounding Sensors Module
3.5. Three-Dimensional Visualization Module
3.6. Validation of the Effectiveness of the Virtual Testing System
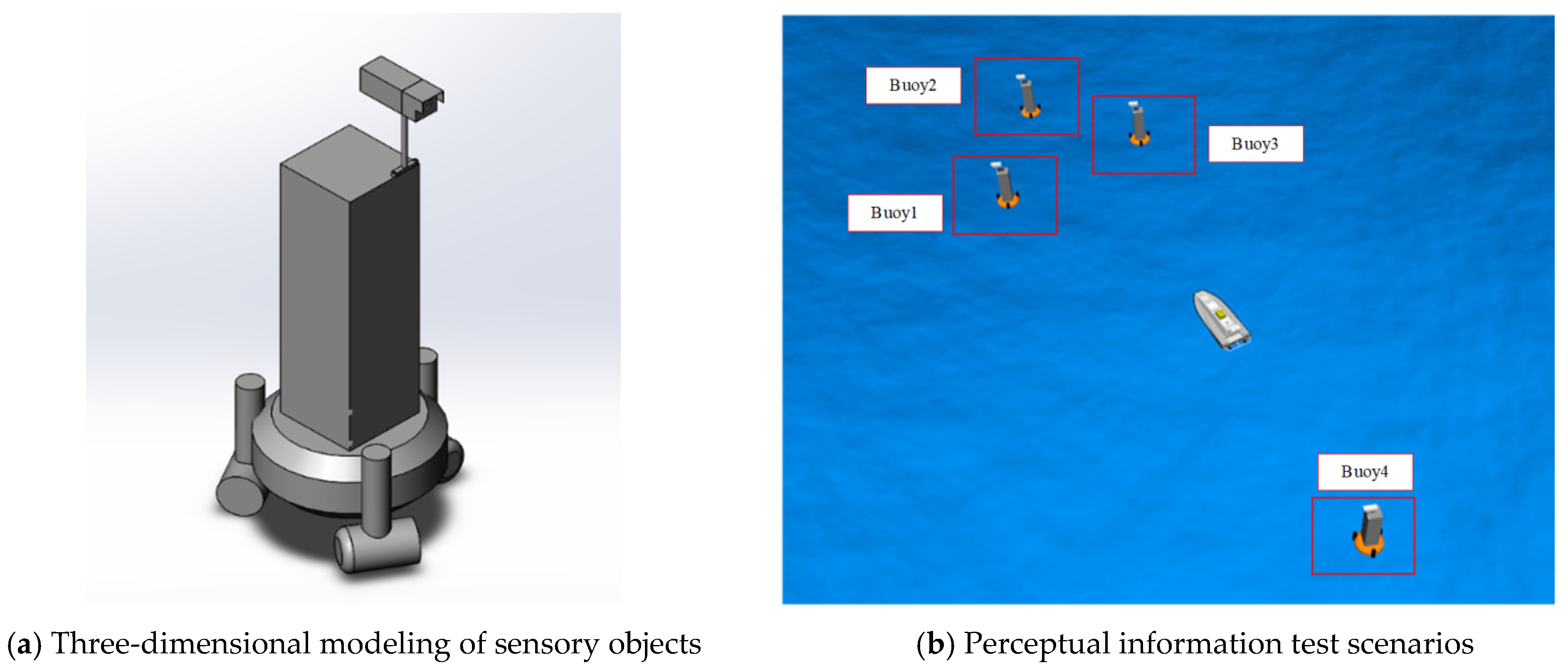
3.6.1. Validation of Perceptual Information Validity
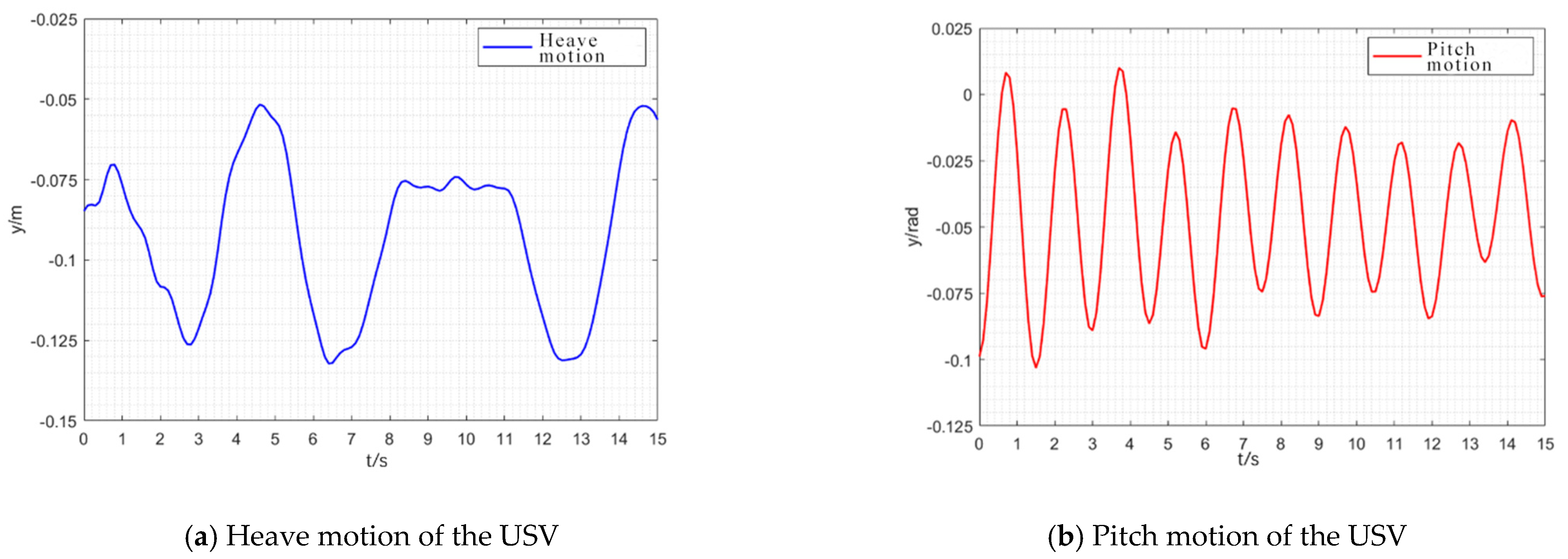
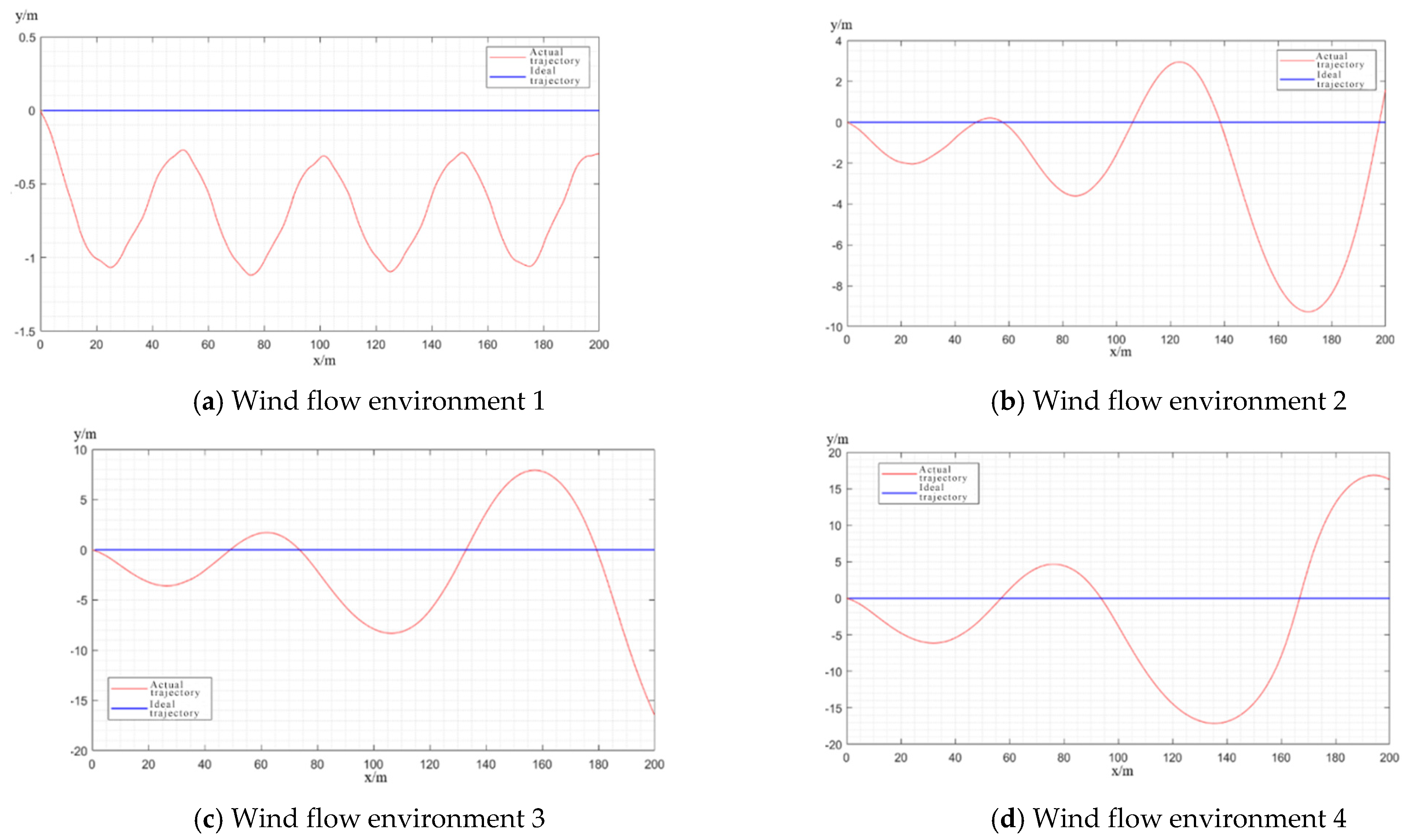
3.6.2. Validation of Environmental Interference Effectiveness
4. Virtual Testing and Evaluation of the Autonomous Navigation Performance of USVs
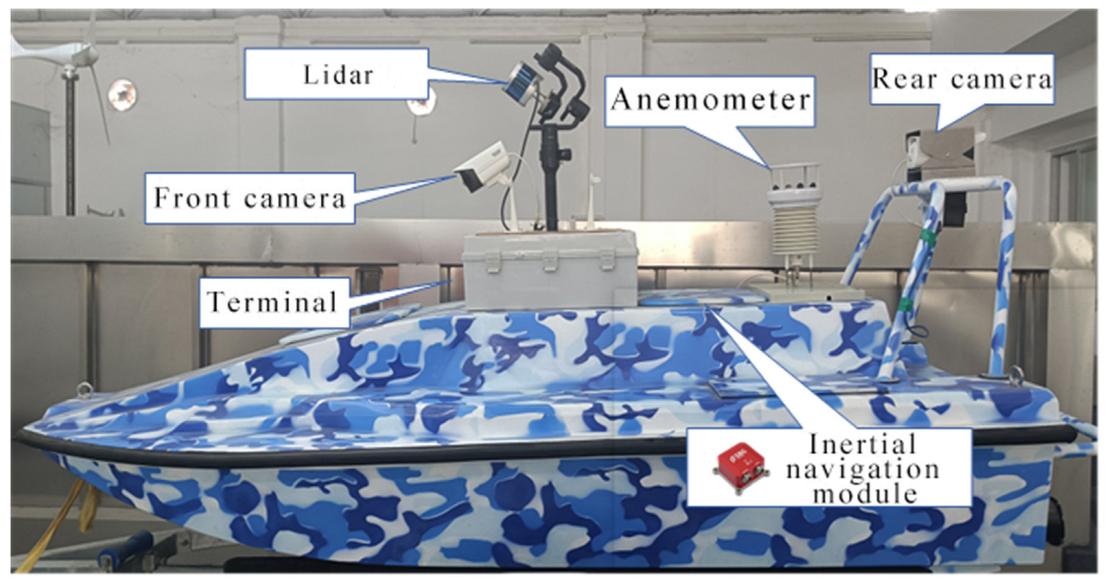
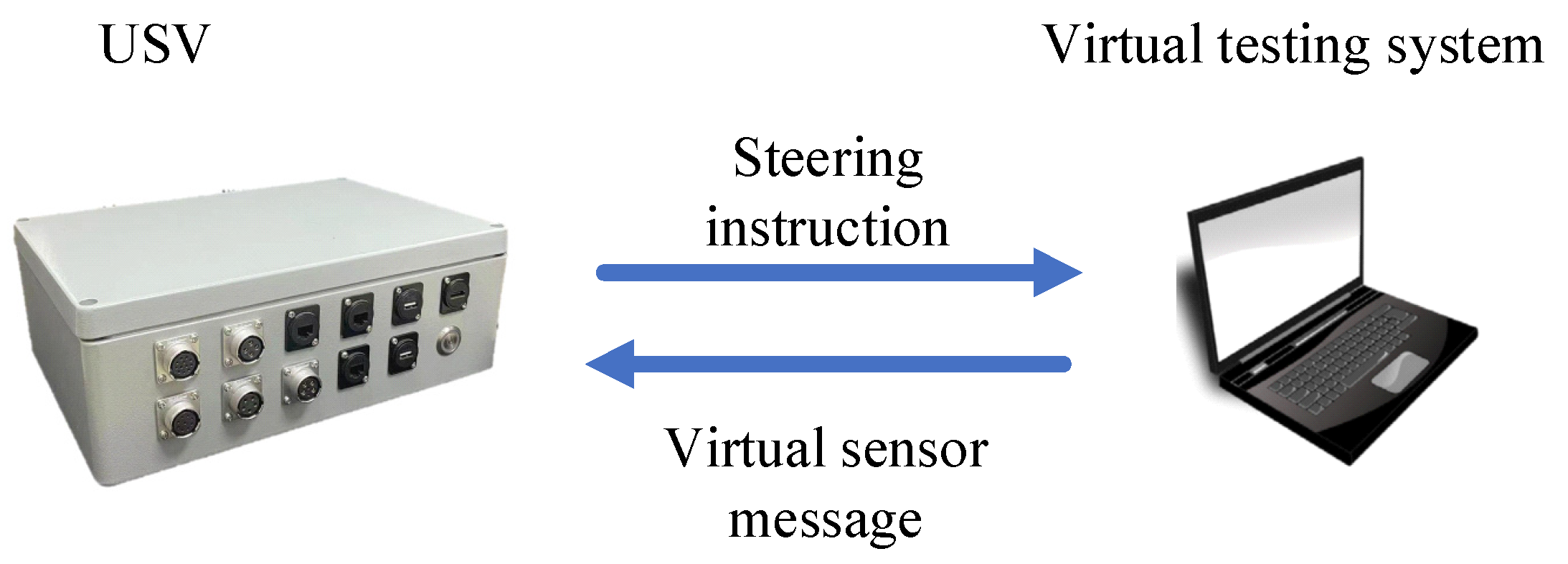
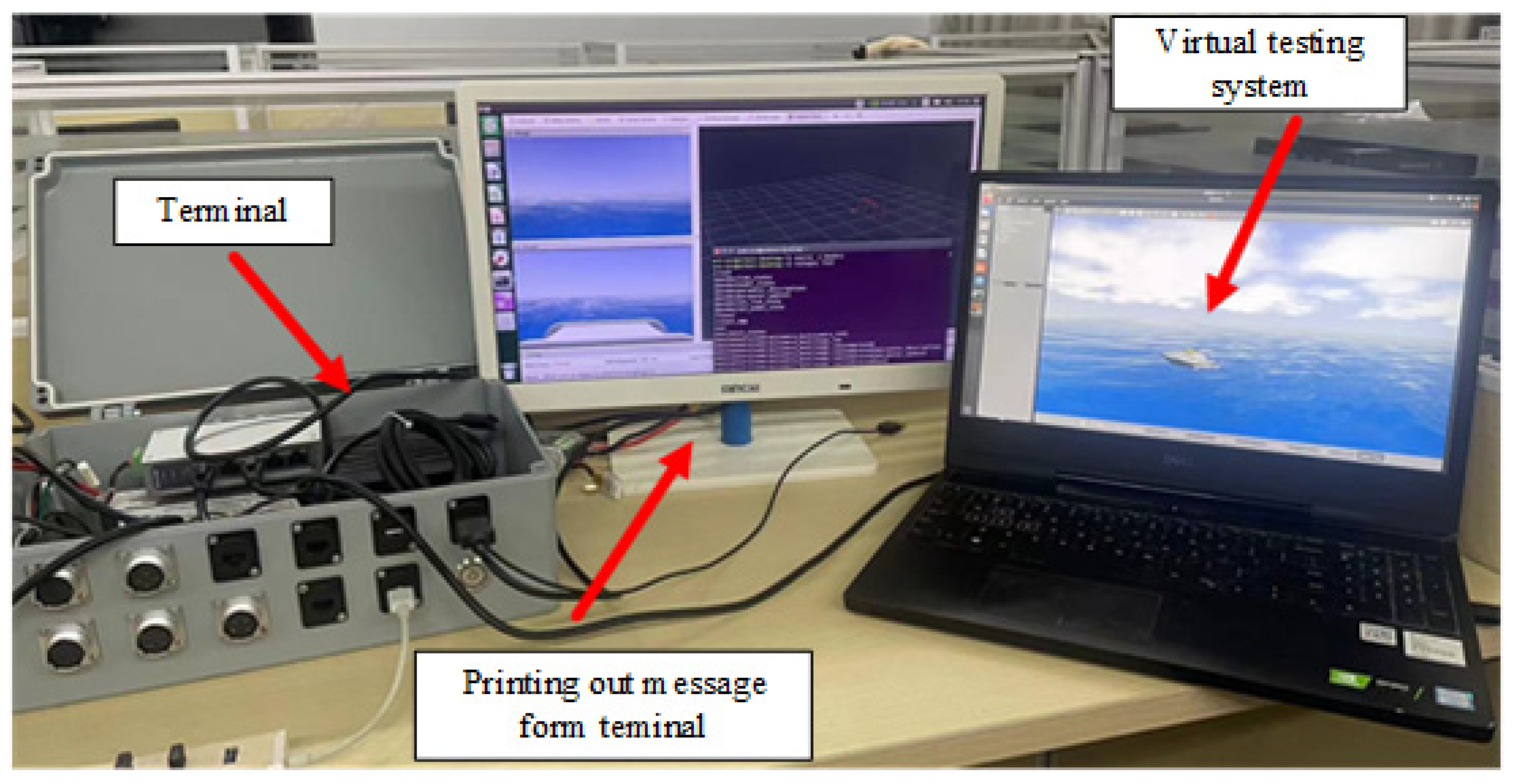
4.1. Virtual Testing Experimental Platform
4.2. Virtual Testing of Autonomous Navigation Performance of USVs
5. Conclusions
- (1)
- Under the ROS environment, a three-dimensional model of a USV is constructed, and a virtual system for testing the autonomous navigation performance of the USV is presented, which includes modules of environment, motion, sensors and visualization. The effectiveness of this virtual testing platform was validated in terms of the effectiveness of the sensory information and environmental interference. In the effectiveness test of sensory information, the virtual obstacles in the virtual testing environment can be perceived by the virtual sensors and relevant information can be obtained by the measurement and control terminal of the USV in the form of an RGB image and a 3D point cloud. In the effectiveness test of environmental interference, the average amplitude deviation of the heave motion of USV under the sea state 3 reaches 0.74 m, and the average amplitude deviation of the pitch motion reaches 0.25 rad, while the trajectory offset of the USV with the water current speed of 1 m/s and a wind speed of 10 m/s reaches 10.16 m. The average variance of the track deviation of the USV reaches 10.16 m. The mean square deviation of the USV under a current speed of 1 m/s and a wind speed of 10 m/s reaches 10.1617. The above results validate the effectiveness of the virtual testing platform in terms of perception ability and environmental interference.
- (2)
- A series of autonomous navigation experiments are carried out for the USV, testing obstacle-avoidance ability under static and dynamic situations with different sea states. The virtual testing experiments and evaluation results show that the virtual testing experimental platform is capable of evaluating the USV performance under different parameters of environmental conditions, revealing a tendency for navigation route deviation with the sea state become increasingly rough. The calculated results overall reflects the difference in stability of the autonomous navigation performance of USVs under different sea states.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jin, J.; Zhou, Z.; Bo, Z.; Chen, Y.; Wei, X. Research on key technology of USV navigation simulation. J. Syst. Simul. 2021, 33, 2846–2853. [Google Scholar]
- Phanthong, T.; Maki, T.; Ura, T.; Sakamaki, T.; Aiyarak, P. Application of A* algorithm for real-time path re-planning of an unmanned surface vehicle avoiding underwater obstacles. J. Mar. Sci. Appl. 2014, 13, 105–116. [Google Scholar] [CrossRef]
- Villa, J.; Aaltonen, J.; Koskinen, K.T. Path-following with lidar-based obstacle avoidance of an unmanned surface vehicle in harbour conditions. IEEE/ASME Trans. Mechatron. 2020, 25, 1812–1820. [Google Scholar] [CrossRef]
- Wei, X.Y. Research on Key Technology of Autonomous Local Obstacle Avoidance System for Surface Unmanned Craft; South China University of Technology: Guangzhou, China, 2019. [Google Scholar]
- Mu, D. Research on Modelling and Motion Control Strategy of Unmanned Surface Vessel Propelled by Single Stern Machine; Dalian Maritime University: Dalian, China, 2020. [Google Scholar]
- Xiao, G.; Tong, C.; Wang, Y. CFD Simulation of the Safety of Unmanned Ship Berthing under the Influence of Various Factors. Appl. Sci. 2021, 11, 7102–7114. [Google Scholar] [CrossRef]
- Wu, G.; Zhao, M.; Cong, Y.; Hu, Z.; Li, G. Algorithm of Berthing and Maneuvering for Catamaran Unmanned Surface Vehicle Based on Ship Maneuverability. J. Mar. Sci. Eng. 2021, 9, 289–310. [Google Scholar] [CrossRef]
- Maki, A.; Sakamoto, N.; Akimoto, Y.; Nishikawa, H.; Umeda, N. Application of optimal control theory based on the evolution strategy (CMA ES) to automatic berthing. J. Mar. Sci. Technol. 2020, 25, 221–233. [Google Scholar] [CrossRef]
- Hu, X.; Zhang, X.; Zhong, Y.; Peng, Y.; Yang, Y.; Yao, J. Design and implementation of unmanned surface boat simulation system. J. Shanghai Univ. (Nat. Sci. Ed.) 2017, 23, 56–67. [Google Scholar]
- Heins, P.H.; Jones, B.L.; Taunton, D.J. Design and validation of an unmanned surface vehicle simulation model. Appl. Math. Model. 2017, 48, 749–774. [Google Scholar] [CrossRef]
- Craighead, J.; Murphy, R.; Burke, J.; Goldiez, B. A survey of commercial & open source unmanned vehicle simulators. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 852–857. [Google Scholar]
- Wu, H.P. Real-Time Simulation of Ship Rocking Motion Based on Unity3D; Dalian Maritime University: Dalian, China, 2019. [Google Scholar]
- Jiang, H. Research on the Development of USV View System Based on Unity3D; Wuhan University of Technology: Wuhan, China, 2016. [Google Scholar]
- Lu, D.; Qiu, Y.; Xin, J. Simulation of ship manoeuvring motion based on Unity. Ship Eng. 2019, 41, 19–22. [Google Scholar]
- Wang, Y. Research on Virtual Ship Simulation Based on Unity 3d; Zhejiang Ocean University: Zhoushan, China, 2019. [Google Scholar]
- Wang, W.; Li, Y.; Luo, X.; Xie, S. Ocean image data augmentation in the USV virtual training scene. Big Earth Data 2020, 4, 451–463. [Google Scholar] [CrossRef]
- Zhou, Z.; He, X.; Xu, L.; Qu, C. Simulation platform for usv path planning based on unity3d and a* algorithm. In Proceedings of the 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 11–13 December 2019; pp. 1–6. [Google Scholar]
- Ødegaard, E. Prototype of HIL Test Platform for Autonomous USV-Simulation of Vessel Dynamics; NTNU: Trondheim, Norway, 2017. [Google Scholar]
- Børs-Lind, K.S. Prototype of HIL Test Platform for Autonomous USV-Simulation and Visualization of Vessel Surroundings; NTNU: Trondheim, Norway, 2017. [Google Scholar]
- Bingham, B.; Agüero, C.; McCarrin, M.; Klamo, J.; Malia, J.; Allen, K.; Lum, T.; Rawson, M.; Waqar, R. Toward maritime robotic simulation in gazebo. In Proceedings of the IEEE OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; pp. 1–10. [Google Scholar]
- Meng, J.; Humne, A.; Bucknall, R. A Fully-Autonomous Framework of Unmanned Surface Vehicles in Maritime Environments Using Gaussian Process Motion Planning. IEEE J. Ocean. Eng. 2022, 48, 59–79. [Google Scholar] [CrossRef]
- Paravisi, M.H.; Santos, D.; Jorge, V.; Heck, G.; Gonçalves, L.M.; Amory, A. Unmanned surface vehicle simulator with realistic environmental disturbances. Sensors 2019, 19, 1068. [Google Scholar] [CrossRef] [PubMed]
- Touzout, W.; Benmoussa, Y.; Benazzouz, D.; Moreac, E.; Diguet, J.P. Unmanned surface vehicle energy consumption modelling under various realistic disturbances integrated into simulation environment. Ocean Eng. 2021, 222, 108560. [Google Scholar] [CrossRef]
- Yan, X.; Jiang, D.; Miao, R.; Li, Y. Formation control and obstacle avoidance algorithm of a multi-USV system based on virtual structure and artificial potential field. J. Mar. Sci. Eng. 2021, 9, 161–165. [Google Scholar] [CrossRef]
- Smith, P.; Dunbabin, M. High-fidelity autonomous surface vehicle simulator for the maritime RobotX challenge. IEEE J. Ocean. Eng. 2018, 44, 310–319. [Google Scholar] [CrossRef]
- Quan, Y.; Lau, L. Development of a trajectory constrained rotating arm rig for testing GNSS kinematic positioning. Measurement 2019, 140, 479–485. [Google Scholar] [CrossRef]
- Larsson, L.; Stern, F.; Visonneau, M. Numerical Ship Hydrodynamics: An Assessment of the Gothenburg 2010 Workshop; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Wenhua, L.; Jialu, D.; Yuqing, S.; Haiquan, C.; Yindong, Z.; Jian, S. Modeling and simulation of marine environmental disturbances for dynamic positioned ship. In Proceedings of the IEEE 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 1938–1943. [Google Scholar]
- Sørensen A, J. Propulsion and motion control of ships and ocean structures. Mar. Technol. Cent. Dep. Mar. Technology. Lect. Notes 2011. [Google Scholar]
- Hong, X. A Quantitative Evaluation Method for Obstacle Avoidance Performance of Unmanned Ship. J. Mar. Sci. Eng. 2021, 9, 1127–1141. [Google Scholar]
- Xiao, G.; Zheng, G.; Ren, B.; Wang, Y.; Hong, X.; Zhang, Z. A Test Method for Obstacle-Avoidance Performance of Unmanned Surface Vehicles Based on Mobile-Buoy–Shore Multisource-Sensing-Data Fusion. J. Mar. Sci. Eng. 2022, 10, 819. [Google Scholar] [CrossRef]
- Kim, H.; Yun, S.; Choi, Y. Collision Avoidance Algorithm Based on COLREGs for Unmanned Surface Vehicle. J. Mar. Sci. Eng. 2021, 9, 863–872. [Google Scholar] [CrossRef]
- Huang, Y. Research on Measurement and Control Technology for Automatic Berthing of Azimuth Thruster Unmanned Surface Vehicles; South China University of Technology: Guangzhou, China, 2021. [Google Scholar]
- Wei, J.; Dolan, J.M.; Litkouhi, B. A prediction-and cost function-based algorithm for robust autonomous freeway driving. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, La Jolla, CA, USA, 21–24 June 2010; pp. 512–517. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Mesh Grids (Million) | Predicted Value of Drag Coefficient | Standard Value of Drag Coefficient Presented by the Gothenburg Symposium [27] | Deviation | |
|---|---|---|---|---|
| Scheme 1 | 1.5464 | 0.003895 | 0.003711 | 4.96% |
| Scheme 2 | 3.6533 | 0.003821 | 0.003711 | 2.96% |
| Scheme 3 | 7.9518 | 0.003772 | 0.003711 | 1.64% |
| Sea State | Reaction Distance (m) | Regression Distance (m) | Obstacle Avoidance Time (s) |
|---|---|---|---|
| 0 | 19.12 | 18.13 | 21.31 |
| 1 | 18.76 | 20.32 | 22.05 |
| 2 | 19.02 | 20.91 | 22.93 |
| 3 | 18.87 | 24.18 | 24.32 |
| Sea State | Reaction Distance (m) | Minimum Distance for Obstacle Avoidance (m) | Obstacle Avoidance Time (s) |
|---|---|---|---|
| 0 | 19.09 | 6.46 | 12.43 |
| 1 | 19.39 | 5.89 | 13.05 |
| 2 | 19.01 | 5.67 | 12.89 |
| 3 | 19.79 | 4.98 | 15.21 |
| Sea State | Reaction Distance (m) | Minimum Distance for Obstacle Avoidance (m) | Obstacle Avoidance Time (s) |
|---|---|---|---|
| 0 | 19.29 | 5.61 | 15.65 |
| 1 | 19.47 | 5.32 | 16.12 |
| 2 | 19.05 | 5.57 | 16.73 |
| 3 | 19.26 | 4.54 | 18.21 |
| Sea State | Reaction Distance (m) | Minimum Distance for Obstacle Avoidance (m) | Obstacle Avoidance Time (s) |
|---|---|---|---|
| 0 | 19.31 | 7.23 | 24.32 |
| 1 | 19.62 | 6.96 | 25.97 |
| 2 | 19.19 | 7.05 | 24.95 |
| 3 | 19.41 | 6.82 | 27.82 |
| Sea State | Static Obstacle Avoidance | Encounter Obstacle Avoidance | Intersection Obstacle Avoidance | Overtaking Obstacle Avoidance |
|---|---|---|---|---|
| 1 | 9.41% | 6.19% | 6.7% | 5.11% |
| 2 | 10.87% | 19.71% | 12.05% | 8.98% |
| 3 | 22.6% | 27.81% | 29.7% | 18.43% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, G.; Zheng, G.; Tong, C.; Hong, X. A Virtual System and Method for Autonomous Navigation Performance Testing of Unmanned Surface Vehicles. J. Mar. Sci. Eng. 2023, 11, 2058. https://doi.org/10.3390/jmse11112058
Xiao G, Zheng G, Tong C, Hong X. A Virtual System and Method for Autonomous Navigation Performance Testing of Unmanned Surface Vehicles. Journal of Marine Science and Engineering. 2023; 11(11):2058. https://doi.org/10.3390/jmse11112058
Chicago/Turabian StyleXiao, Guoquan, Guihong Zheng, Chao Tong, and Xiaobin Hong. 2023. "A Virtual System and Method for Autonomous Navigation Performance Testing of Unmanned Surface Vehicles" Journal of Marine Science and Engineering 11, no. 11: 2058. https://doi.org/10.3390/jmse11112058
APA StyleXiao, G., Zheng, G., Tong, C., & Hong, X. (2023). A Virtual System and Method for Autonomous Navigation Performance Testing of Unmanned Surface Vehicles. Journal of Marine Science and Engineering, 11(11), 2058. https://doi.org/10.3390/jmse11112058