
A Numerical Study of the Hydrodynamic Noise of Podded Propulsors Based on Proper Orthogonal Decomposition

Abstract
:1. Introduction
2. Numerical Computational Methods
2.1. Numerical Theory
2.1.1. Turbulence Computational Governing Equations
2.1.2. Acoustic Computational Governing Equations
2.1.3. Proper Orthogonal Decomposition Theory
2.2. Mesh Generation
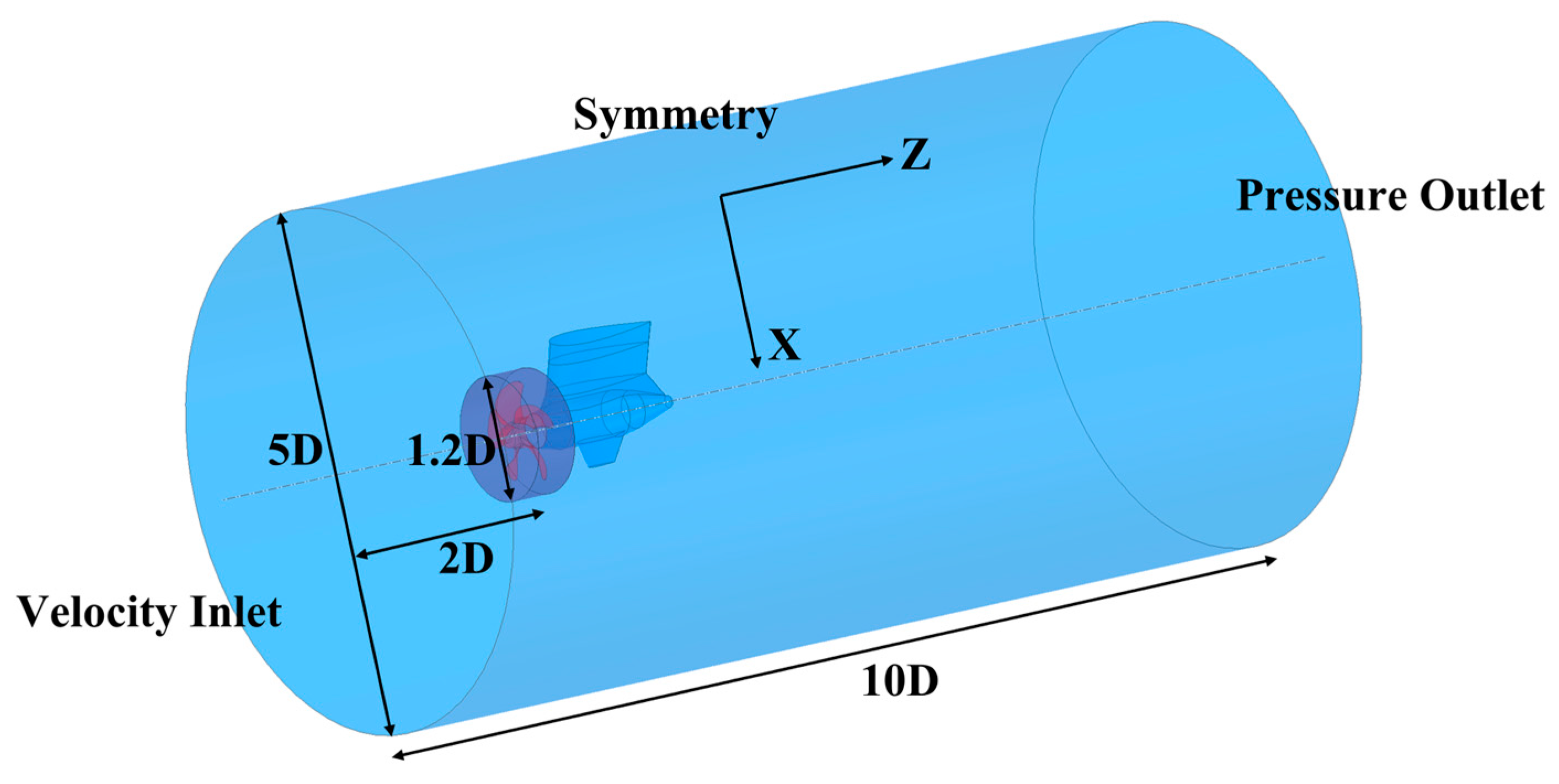
2.2.1. Computational Model
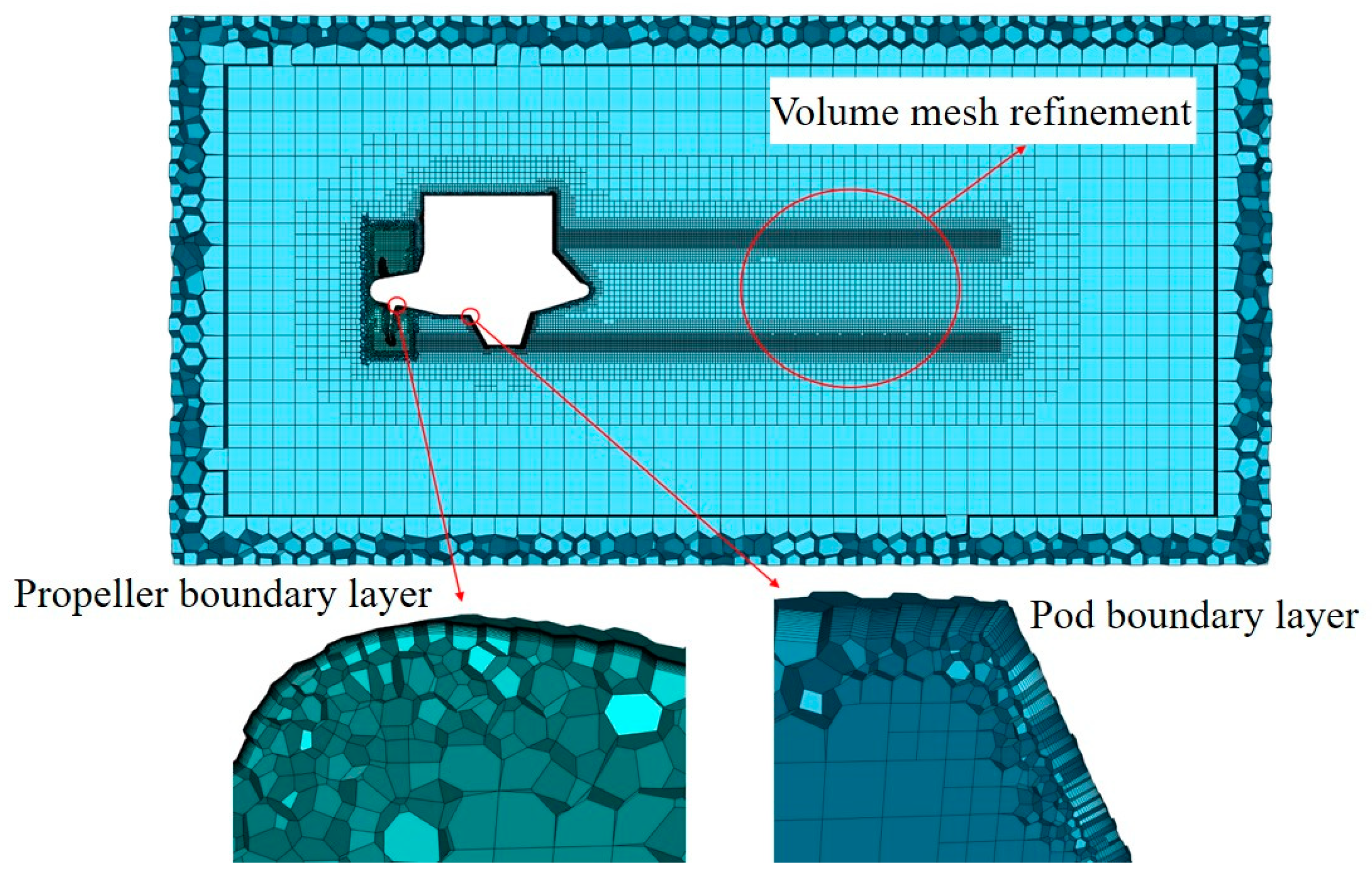
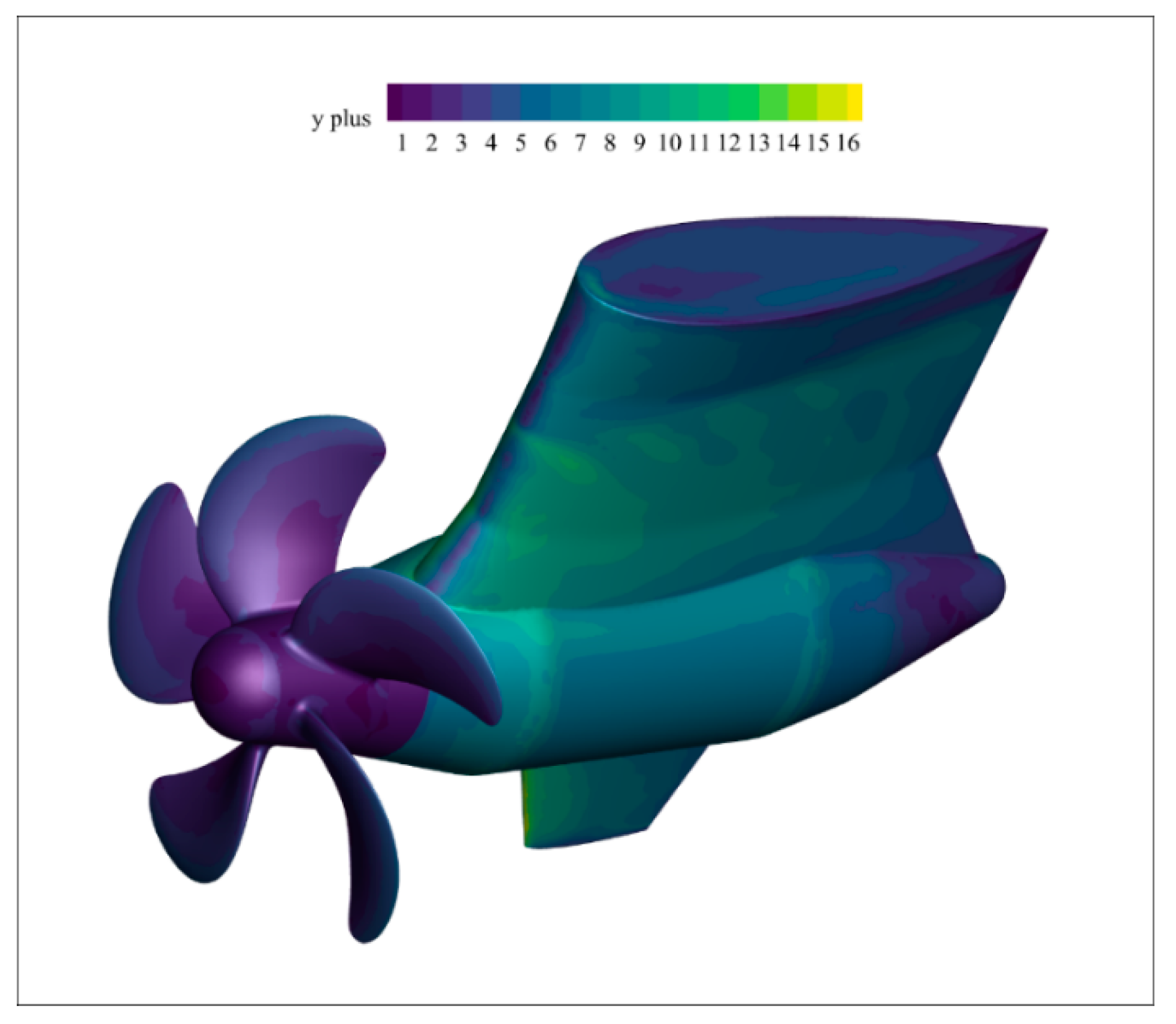
2.2.2. Mesh Grids
2.3. Numerical Methods
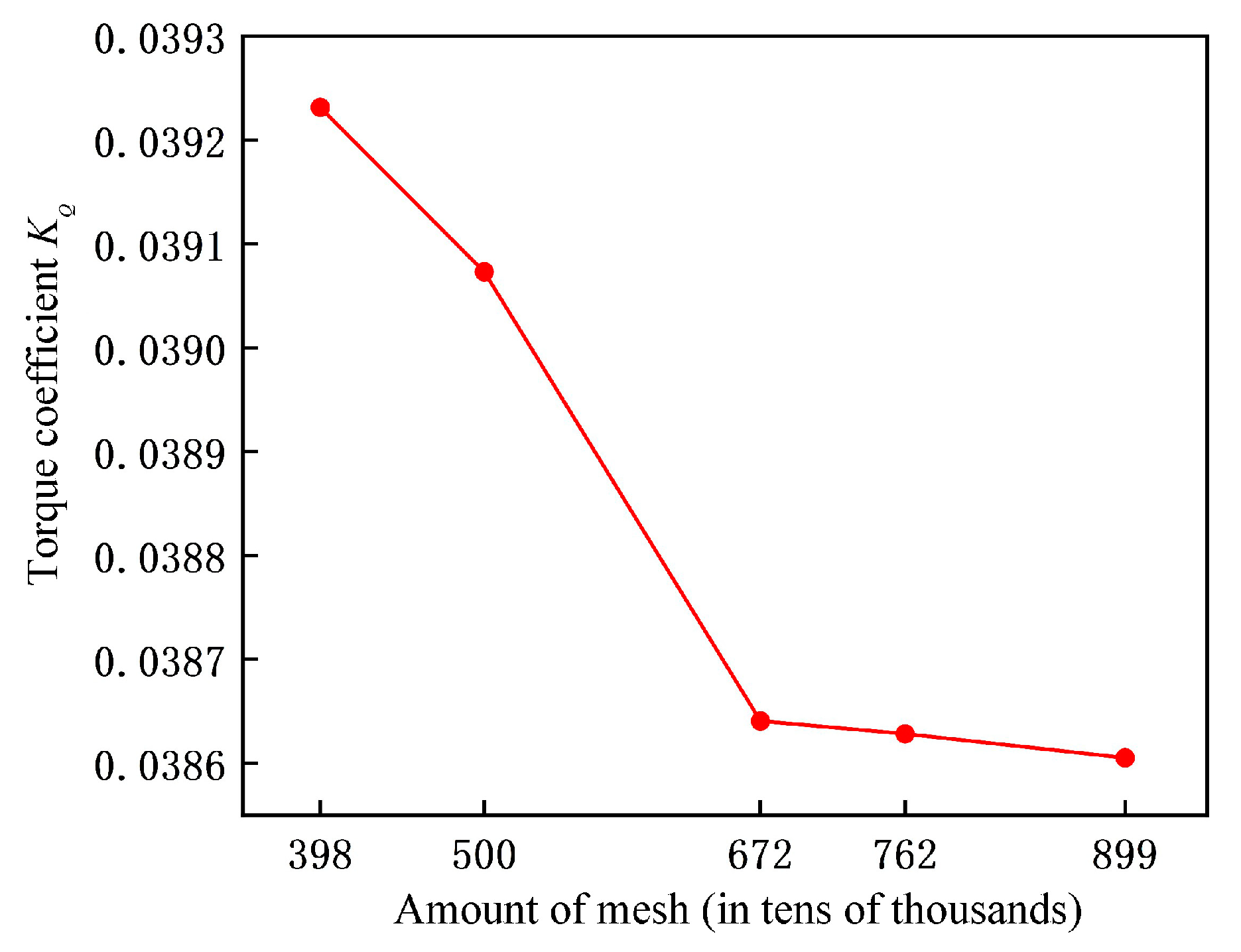
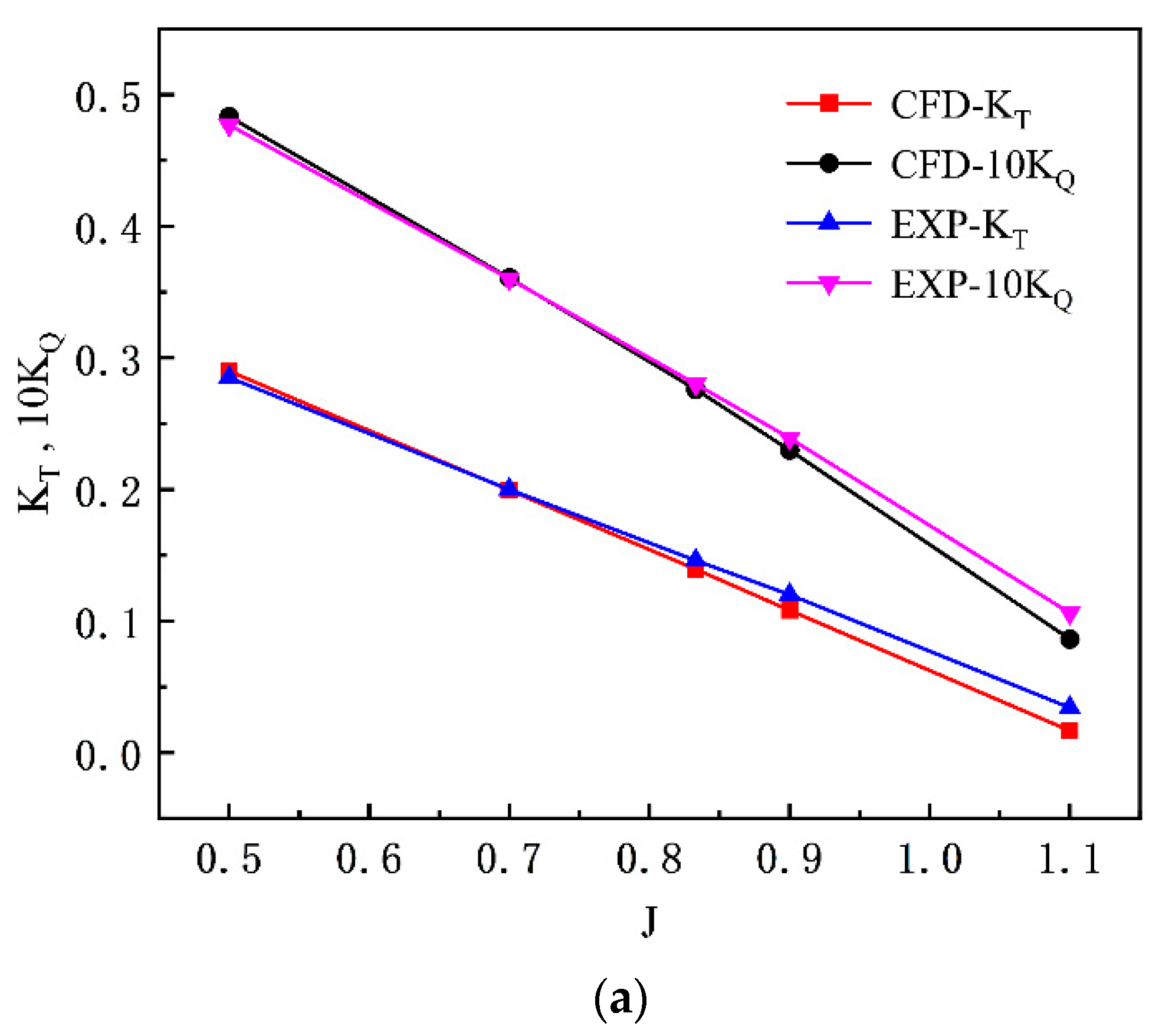
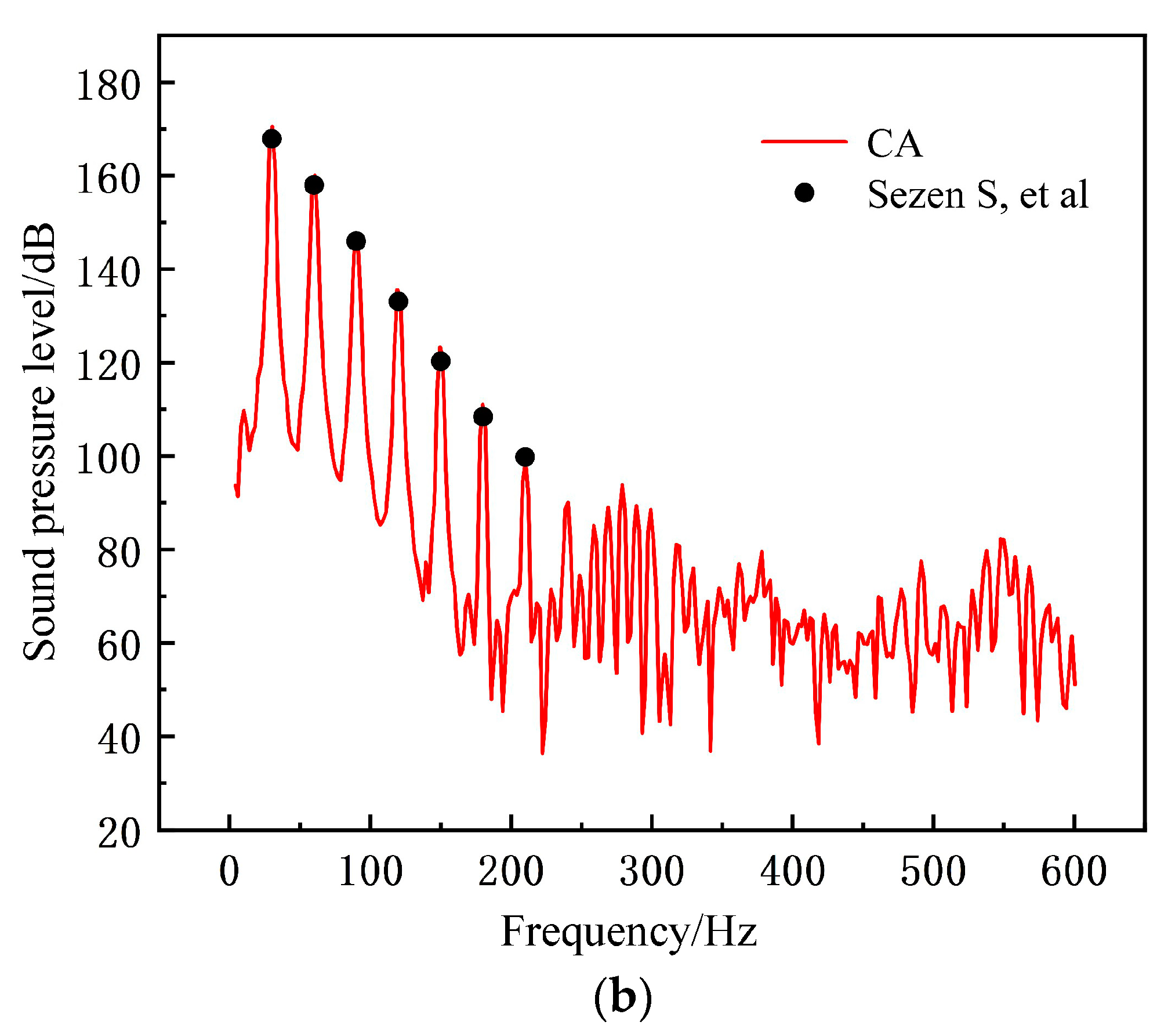
2.4. Numerical Method Verification and Validation
3. Results and Discussions
3.1. Acoustic Field Distribution Characteristics on the Propeller Plane
3.2. Acoustic Field Distribution Characteristics in the Spatial Domain
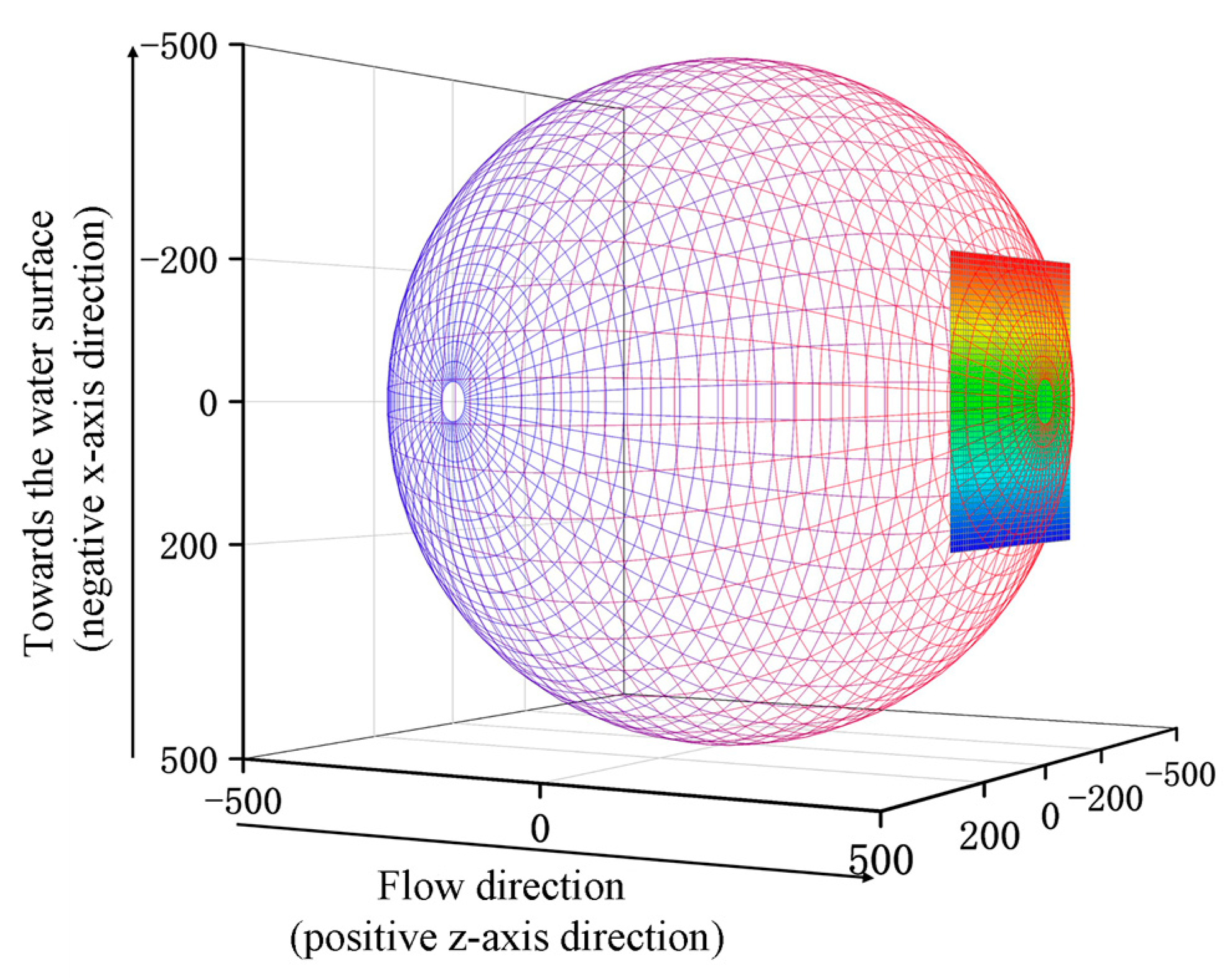
3.2.1. Spherical Sound Pressure Distribution
3.2.2. Planar Sound Pressure Distribution
4. Conclusions
- (1)
- On the propeller disc, the energy of sound pressure fluctuations was primarily concentrated at the shaft frequency, blade passing frequency, and their harmonics. However, the circumferential distribution of sound pressure levels was uniform, displaying no distinct directivity.
- (2)
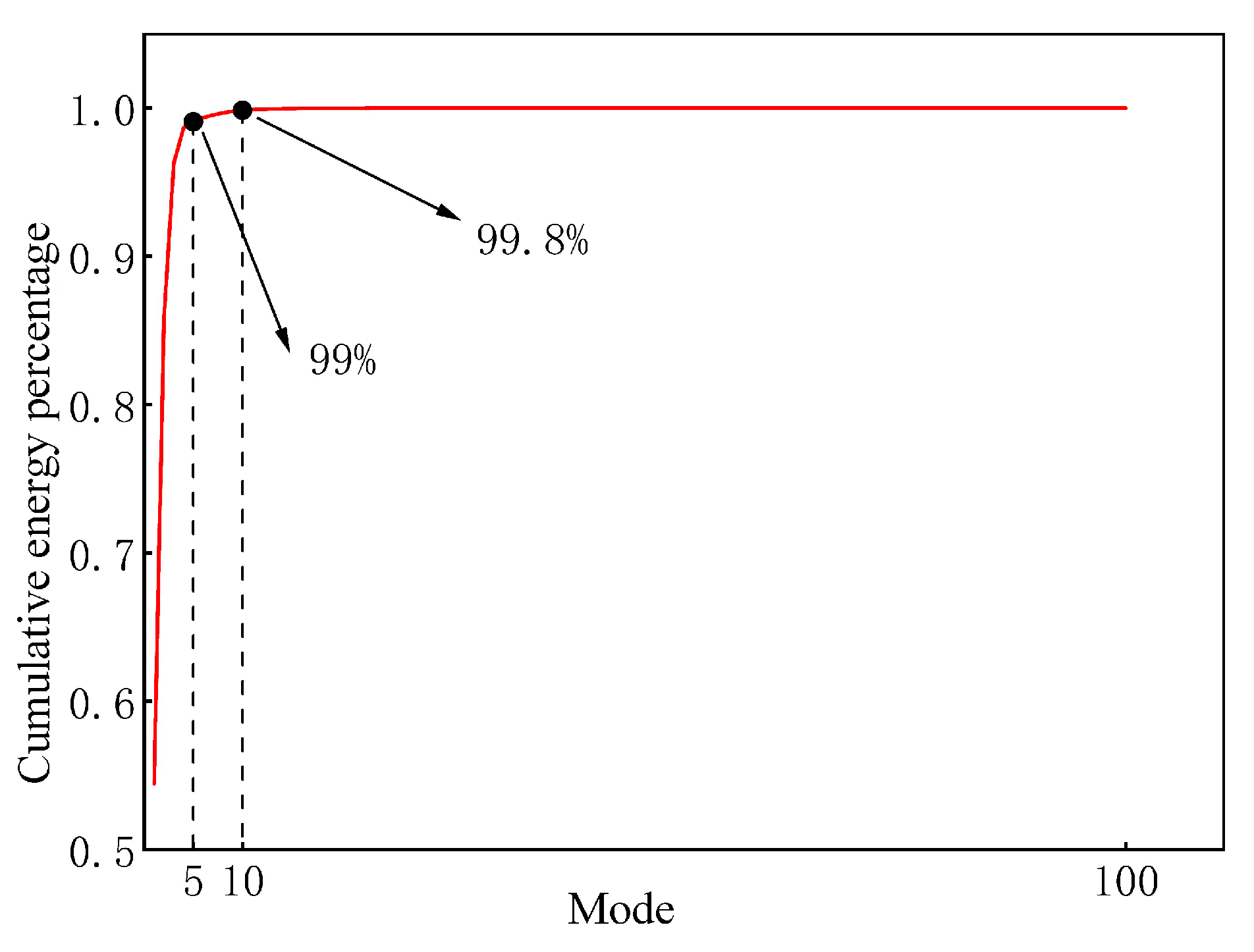
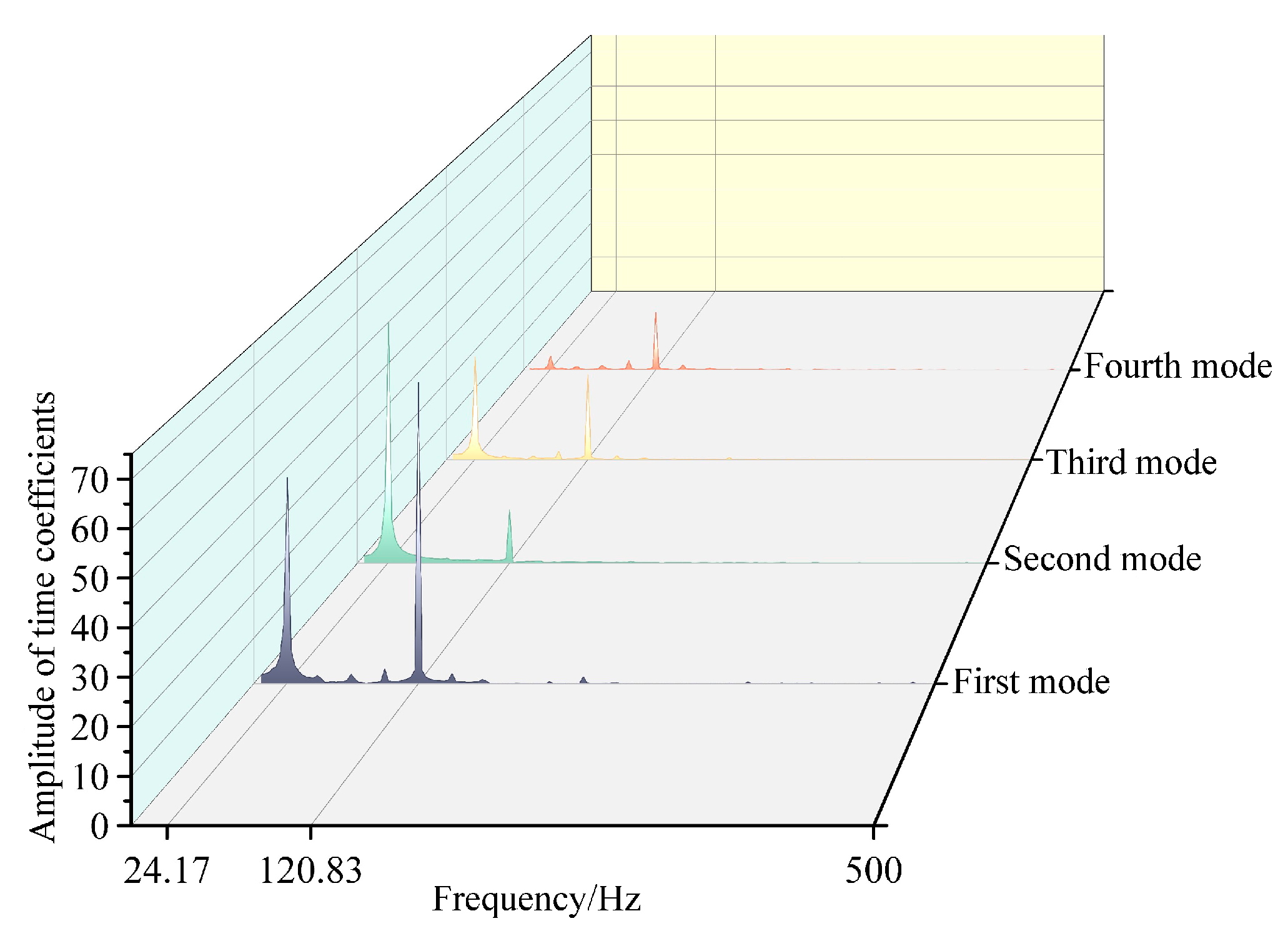
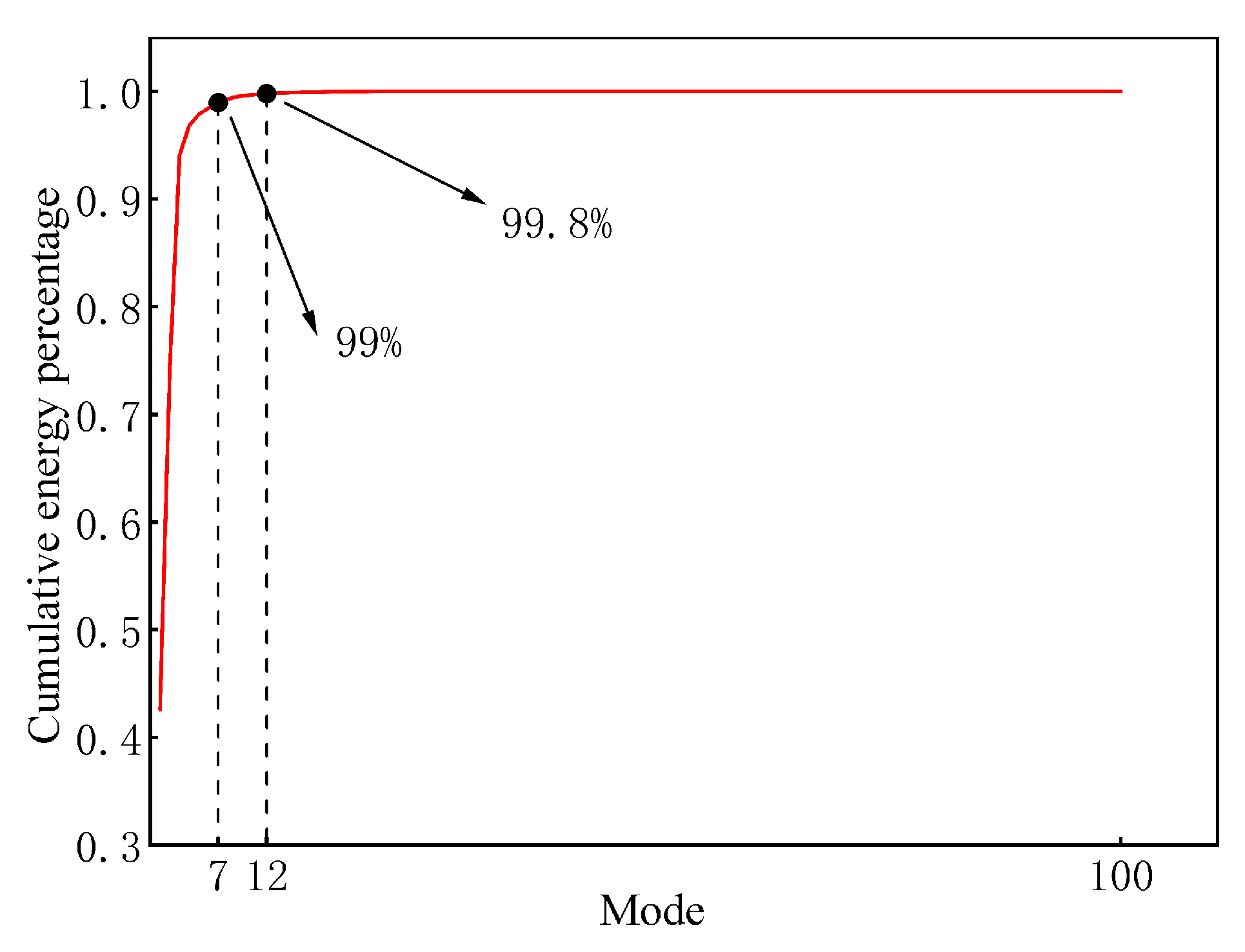
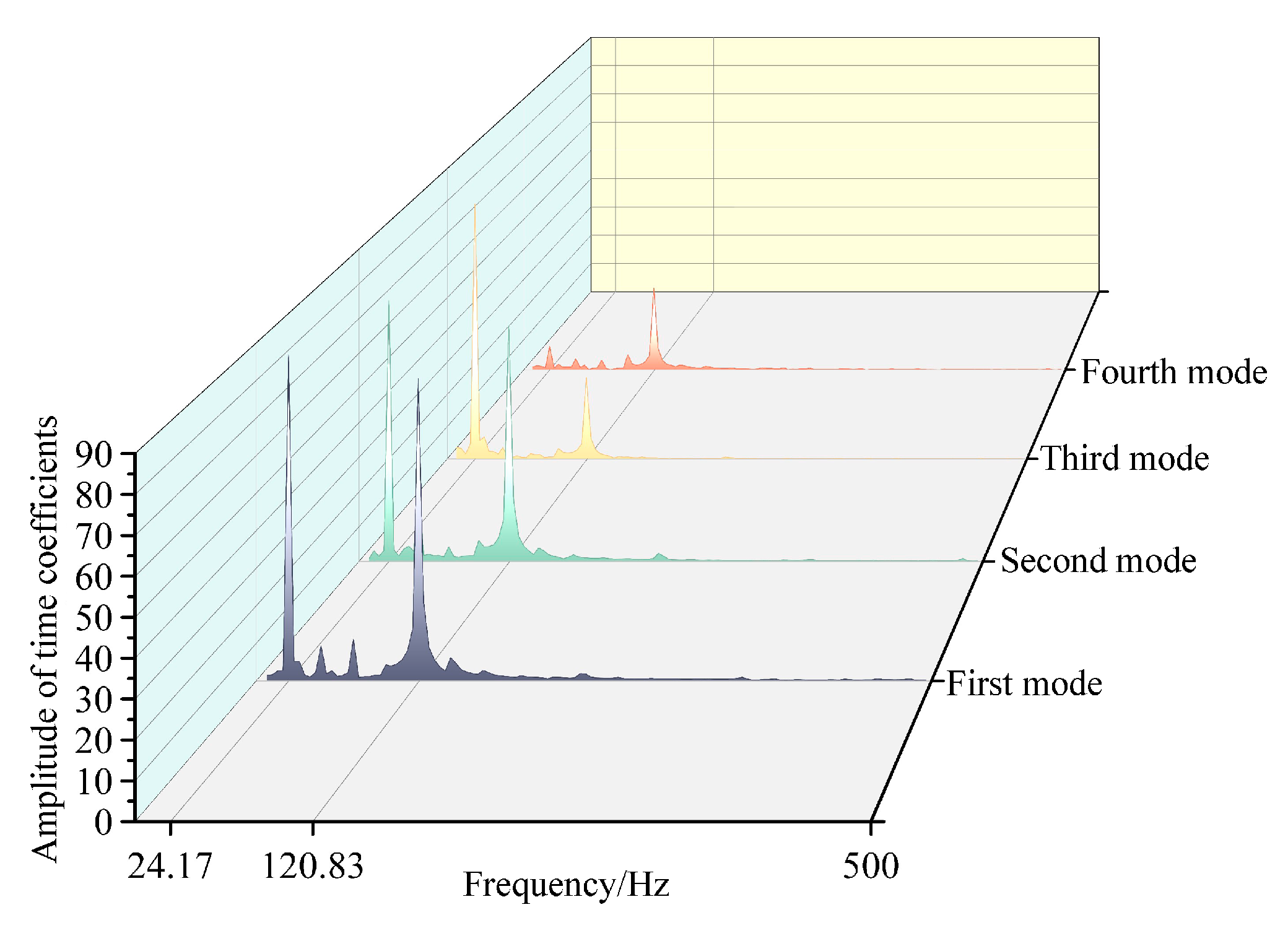
- In the spatial spherical and planar surface, the first 10 and 12 POD modes, respectively, captured 99.8% of the energy. The first four modes exhibited sound pressure spatial distribution features closely tied to the pod, with their temporal features showing discrete frequencies primarily centered around the shaft and blade passing frequencies.
- (3)
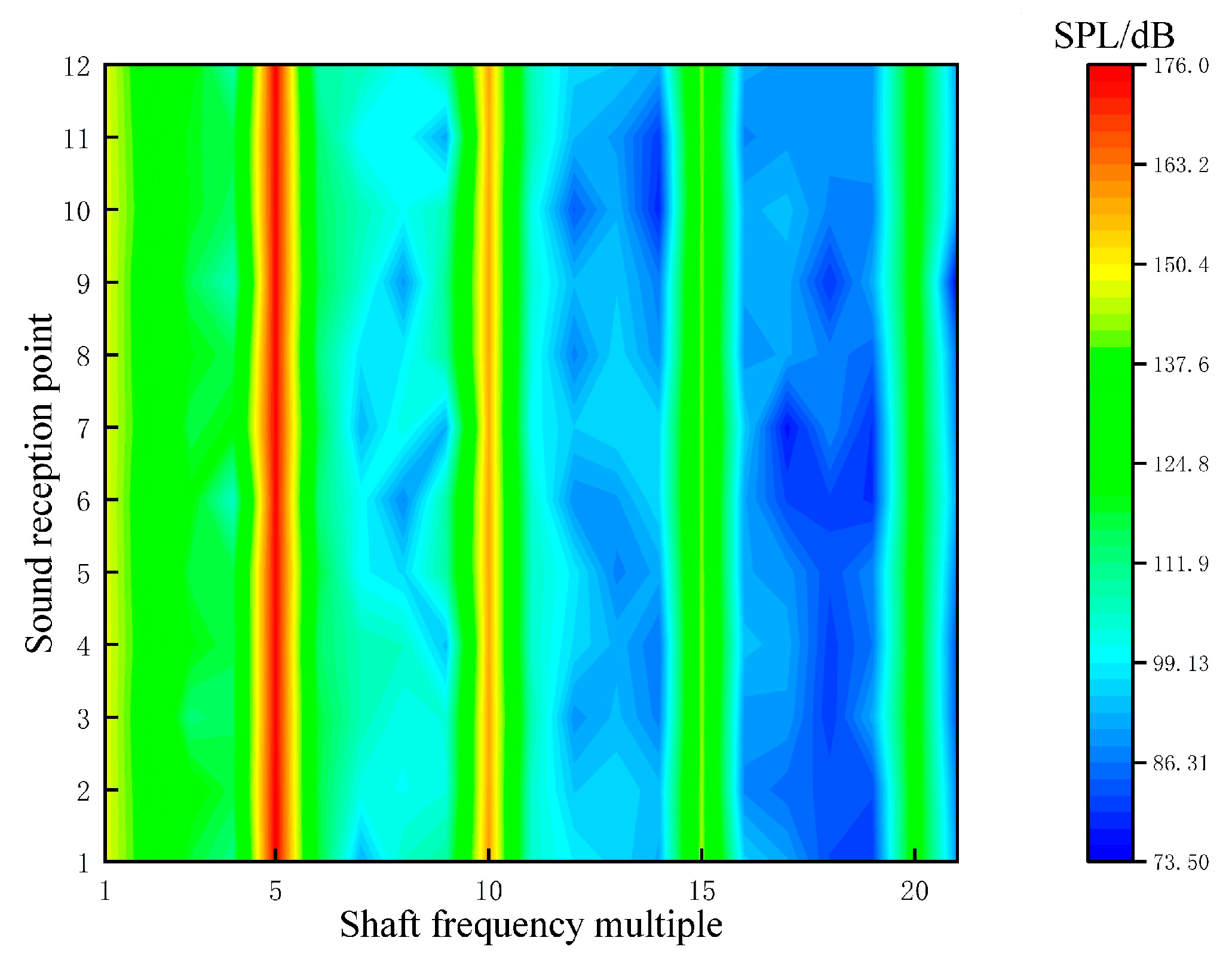
- The FFT analysis of sound pressure revealed the single-frequency distribution characteristics on the spatial surfaces. The shaft and blade passing frequencies emerged as dominant frequency components, with distinct regions of high and low values. These regions correlated with the presence of the pod. Based on the results and discussions, it is evident that the POD method can identify the inherent distribution structure of hydrodynamic noise of podded propulsor. The POD method should have potential uses in podded propulsor design and its noise control strategies.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Samoilescu, G.; Iorgulescu, D.; Mitrea, R.; Cizer, L.D. Propulsion Systems in Marine Navigation. In Proceedings of the International Conference Knowledge-Based Organization, Sibiu, Romania, 14–16 June 2018; Volume 24, pp. 78–82. [Google Scholar]
- Nuchturee, C.; Li, T.; Xia, H. Energy efficiency of integrated electric propulsion for ships—A review. Renew. Sustain. Energy Rev. 2020, 134, 110145. [Google Scholar] [CrossRef]
- Felli, M.; Falchi, M.; Dubbioso, G. Experimental approaches for the diagnostics of hydroacoustic problems in naval propulsion. Ocean. Eng. 2015, 106, 1–19. [Google Scholar] [CrossRef]
- Atlar, M.; Woodwardm, D.; Besnier, F. FASTPOD Project: An Overall Summary Conclusions. In Proceedings of the 2nd International Conference on Technical Advances in Podded Propulsion (T-POD), Nantes, France, 2–3 October 2006; Newcastle University: Newcastle, UK, 2006. [Google Scholar]
- Reza, S.; Hassan, G. Hydrodynamic analysis of puller and pusher of azimuthing podded drive at various yaw angles. J. Eng. Marit. Environ. 2014, 228, 55–69. [Google Scholar]
- Antonio, S.; Timo, R.; Karl, R.; Tuomas, S. Numerical Investigation of Multi-Component Podded Propulsor Performance in Straight Flow. In Proceedings of the Fifth International Symposium on Marine Propulsors smp’17, Espoo, Finland, 12–15 June 2017. [Google Scholar]
- Islam, M.F. Modeling techniques of puller podded propulsor in extreme conditions. J. Ship Res. 2017, 61, 230–255. [Google Scholar] [CrossRef]
- Amini, H.; Sileo, L.; Steen, S. Numerical calculations of propeller shaft loads on azimuth propulsors in oblique inflow. J. Mar. Sci. Technol. 2012, 17, 403–421. [Google Scholar] [CrossRef]
- Islam, M.; Jahra, F.; Ryan, R.; Hedd, L. Hydrodynamics of Podded Propulsors with Highly Loaded Propellers and in Extreme Azimuthing Conditions. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, St John’s, NL, Canada, 31 May 2015; p. V011T12A027. [Google Scholar]
- Mohsen, G.; Hassanm, G.; Jalalm, M. Calculation of sound pressure level of marine propeller in low frequency. J. Low Freq. Noise Vib. Act. Control. 2018, 31, 60–73. [Google Scholar]
- Guo, C.; Xu, P.; Wang, L.; Luo, W. Hydrodynamic performance analysis of podded propulsor under ice blockage condition. J. Huazhong Univ. Sci. Technol. 2018, 46, 41–46. [Google Scholar]
- Nie, Y.; Ouyang, W.; Li, G.; Zhang, C.; Zhou, X. Simulation study on hydrodynamic performance of podded propulsor for curise ship. Chin. J. Ship Res. 2022, 17, 170–177+195. [Google Scholar]
- Ville, M.; Viitanen, A.H.; Tuomas, S.; Siikonen, T. DDES of Wetted and Cavitating Marine Propeller for CHA Underwater Noise Assessment. J. Mar. Sci. Eng. 2018, 6, 56. [Google Scholar]
- Pan, Y.; Zhang, H. Numerical Hydro-Acoustic Prediction of Marine Propeller Noise. Shanghai Jiaotong Univ. 2010, 15, 707–712. [Google Scholar] [CrossRef]
- Mei, Z.; Gao, B.; Zhang, N.; Lai, Y.; Li, G. Numerical Study on the Unsteady Flow Field Characteristics of a Podded Propulsor Based on DDES Method. Energies 2022, 15, 9117. [Google Scholar] [CrossRef]
- Lidtke, A.K.; Humphrey, V.F.; Turnock, S.R. Feasibility study into a computational approach for marine propeller noise and cavitation modeling. Ocean. Eng. 2016, 120, 152–159. [Google Scholar] [CrossRef]
- Felli, M.; Falchi, M.; Dubbioso, G. Tomographic-PIV survey of the near-field hydrodynamic and hydroacoustic characteristics of a marine propeller. J. Ship Res. 2015, 59, 201–208. [Google Scholar] [CrossRef]
- Lumley, J.L. The structure of inhomogeneous turbulent flows. In Atmospheric Turbulence and Radio Wave Propagation; Scientific Research: Moscow, Russia, 1967; pp. 166–178. [Google Scholar]
- Taira, K.; Brunton, S.L.; Dawson, S.T.M.; Rowley, C.W.; Colonius, T.; McKeon, B.J.; Schmidt, O.T.; Gordeyev, S.; Theofilis, V.; Ukeiley, L.S. Modal analysis of fluid flows: An overview. AIAA J. 2017, 55, 4013–4041. [Google Scholar] [CrossRef]
- Magionesi, F.; Dubbioso, G.; Muscari, R.; Di Mascio, A. Modal analysis of the wake past a marine propeller. J. Fluid Mech. 2018, 855, 469–502. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten years of industrial experience with the SST turbulence model. Turbul. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Lighthill, M.J. On sound generated aerodynamically I. General theory. In Proceedings of the Royal Society of London. Series A. Mathematical and Physical Sciences; Royal Society: London, UK, 1952; Volume 211, pp. 564–587. [Google Scholar]
- Williams, J.F.; Hawkings, D.L. Sound generation by turbulence and surfaces in arbitrary motion. In Philosophical Transactions of the Royal Society of London. Series A, Mathematical and Physical Sciences; Royal Society: London, UK, 1969; Volume 264, pp. 321–342. [Google Scholar]
- Brentner, K.S.; Farassat, F. Modeling aerodynamically generated sound of helicopter rotors. Prog. Aerosp. Sci. 2003, 39, 83–120. [Google Scholar] [CrossRef]
- Sezen, S.; Kinaci, O.K. Incompressible flow assumption in hydroacoustic predictions of marine propellers. Ocean. Eng. 2019, 186, 106138. [Google Scholar] [CrossRef]
- Li, D.; Zhang, N.; Jiang, J.; Gao, B.; Alubokin, A.A.; Zhou, W.; Shi, J. Numerical investigation on the unsteady vortical structure and pressure pulsations of a centrifugal pump with the vaned diffuser. Int. J. Heat Fluid Flow 2022, 98, 109050. [Google Scholar] [CrossRef]
- Zhang, N.; Gao, B.; Ni, D.; Liu, X. Coherence analysis to detect unsteady rotating stall phenomenon based on pressure pulsation signals of a centrifugal pump. Mech. Syst. Signal Process. 2021, 148, 107161. [Google Scholar] [CrossRef]
- Jessups, D. An Experimental Investigation of Viscous Aspects of Propeller Blade Flow; The Catholic University of America: Washington, DC, USA, 1989. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Propeller Rotational Speed n (r/min) | 1450 |
| Propeller Diameter D (mm) | 250 |
| Number of Propeller Blades Z | 5 |
| Pod Heigh H (mm) | 341.5 |
| Pod Length L (mm) | 503.2 |
| Design Advance Coefficient J | 0.8217 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Li, G.; Ma, Z.; Mei, Z.; Gao, B.; Zhang, N. A Numerical Study of the Hydrodynamic Noise of Podded Propulsors Based on Proper Orthogonal Decomposition. J. Mar. Sci. Eng. 2023, 11, 2054. https://doi.org/10.3390/jmse11112054
Chen C, Li G, Ma Z, Mei Z, Gao B, Zhang N. A Numerical Study of the Hydrodynamic Noise of Podded Propulsors Based on Proper Orthogonal Decomposition. Journal of Marine Science and Engineering. 2023; 11(11):2054. https://doi.org/10.3390/jmse11112054
Chicago/Turabian StyleChen, Changsheng, Guoping Li, Zhenlai Ma, Ziyi Mei, Bo Gao, and Ning Zhang. 2023. "A Numerical Study of the Hydrodynamic Noise of Podded Propulsors Based on Proper Orthogonal Decomposition" Journal of Marine Science and Engineering 11, no. 11: 2054. https://doi.org/10.3390/jmse11112054