

Applications, Evolutions, and Challenges of Drones in Maritime Transport



Abstract
:1. Introduction
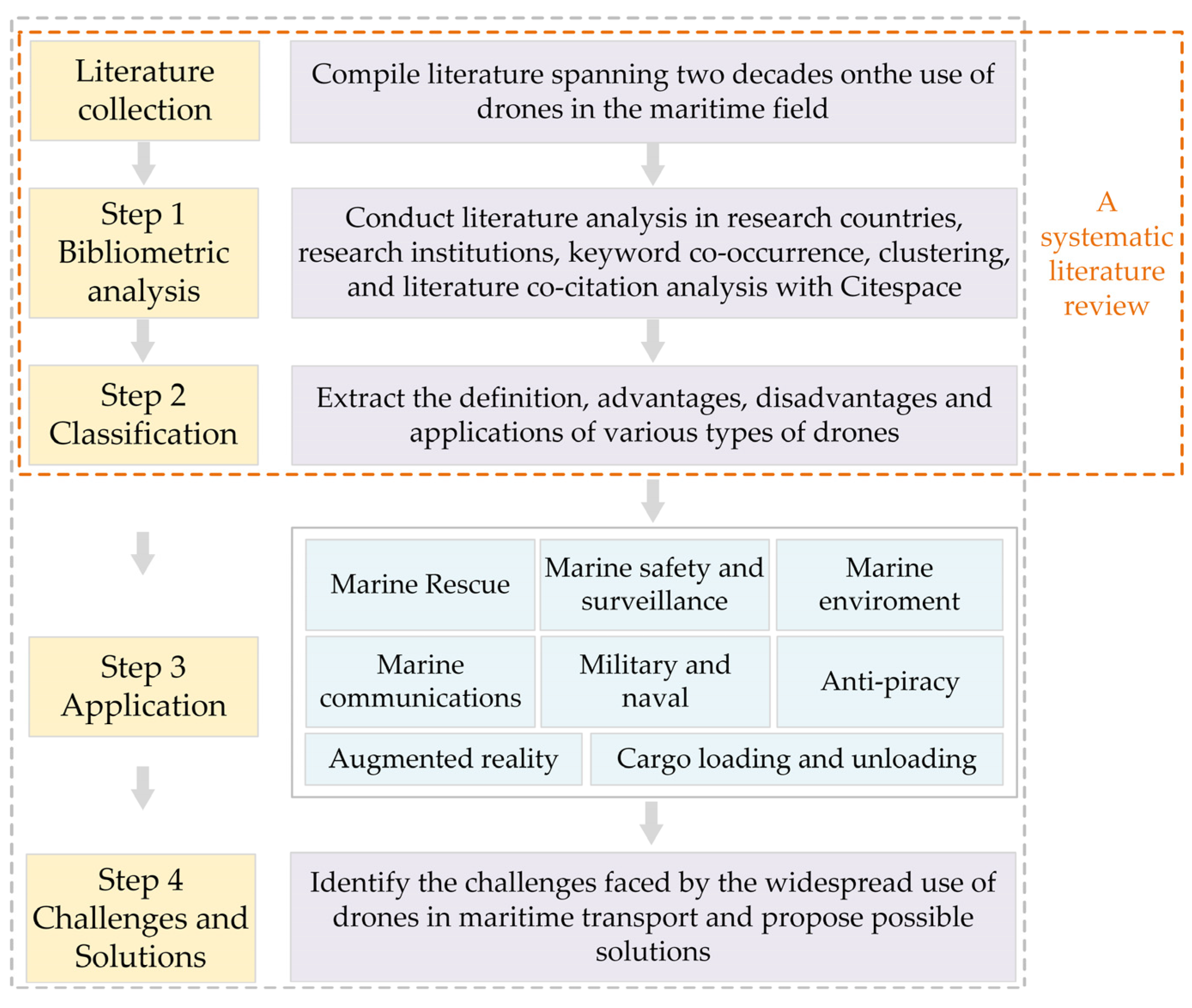
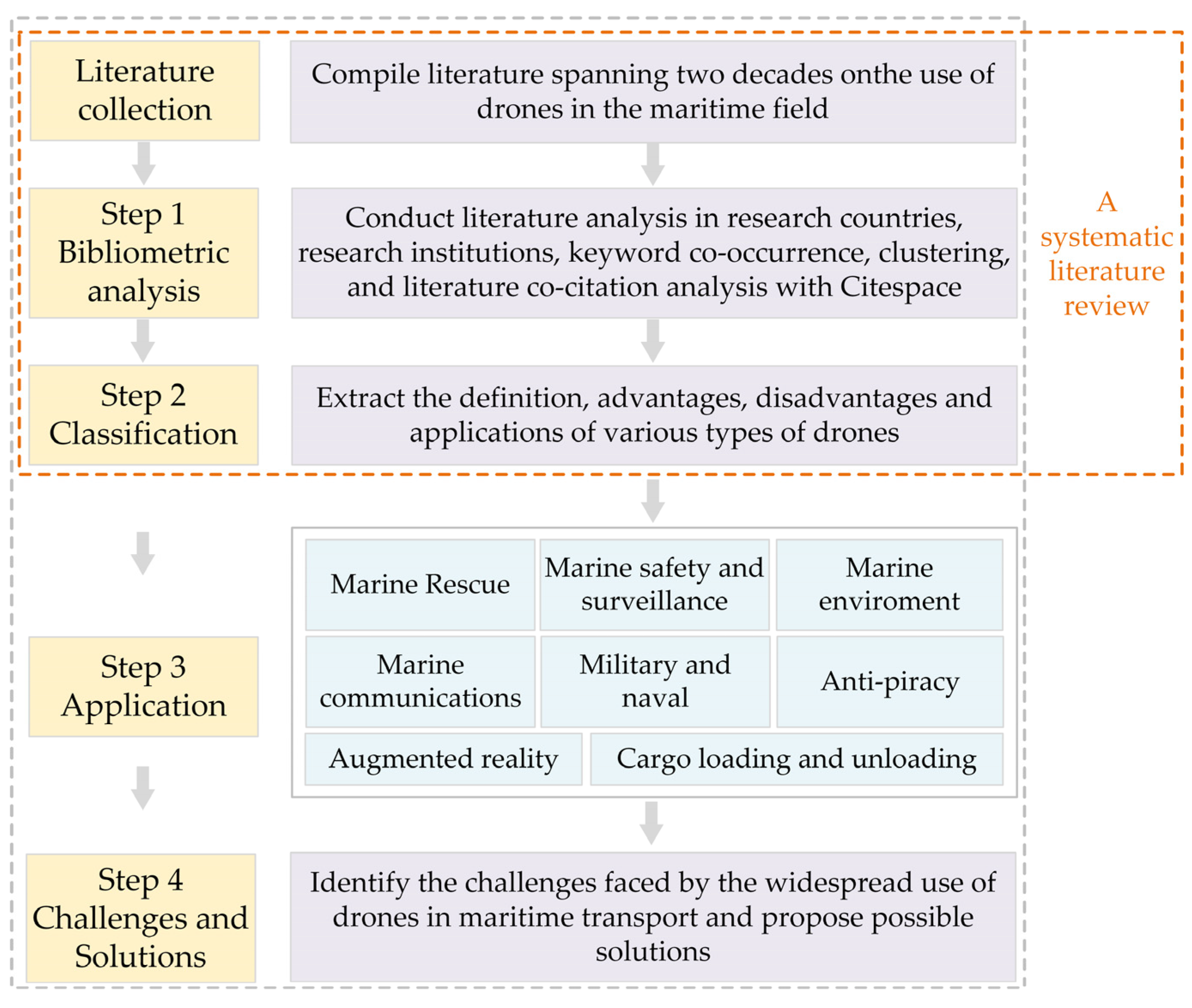
2. A Systematic Literature Review
2.1. Definition and Categories of Drones
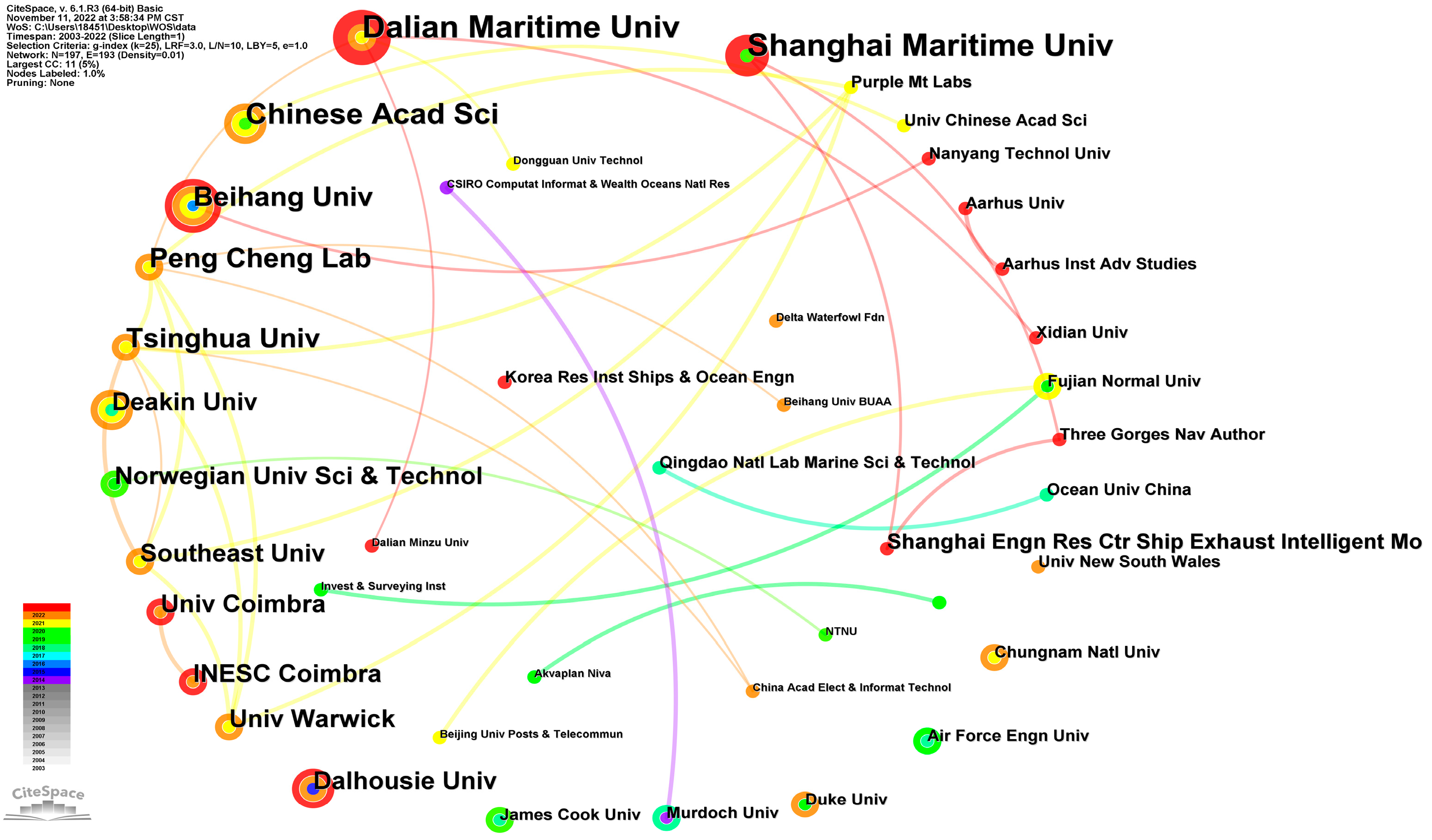
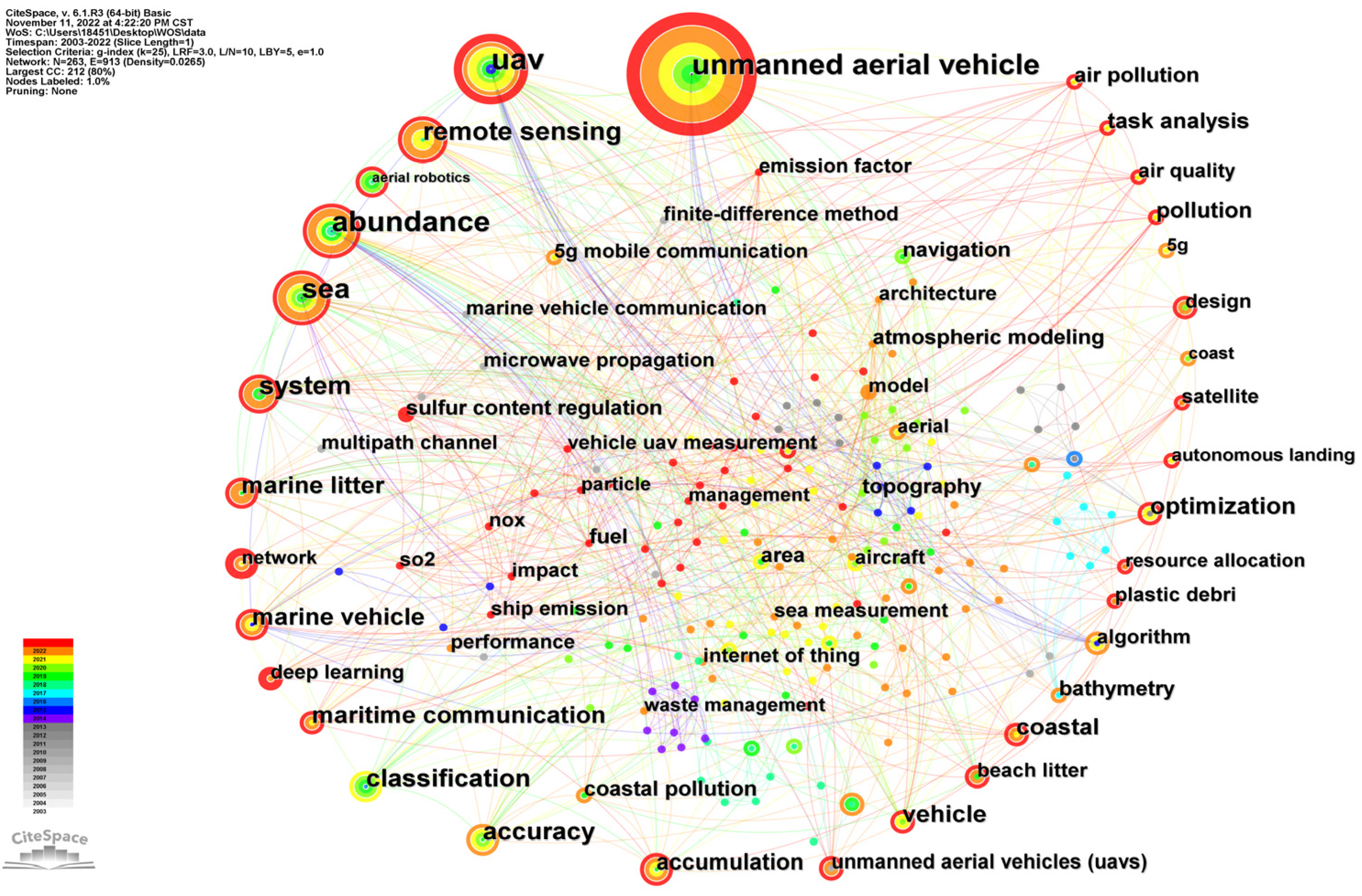
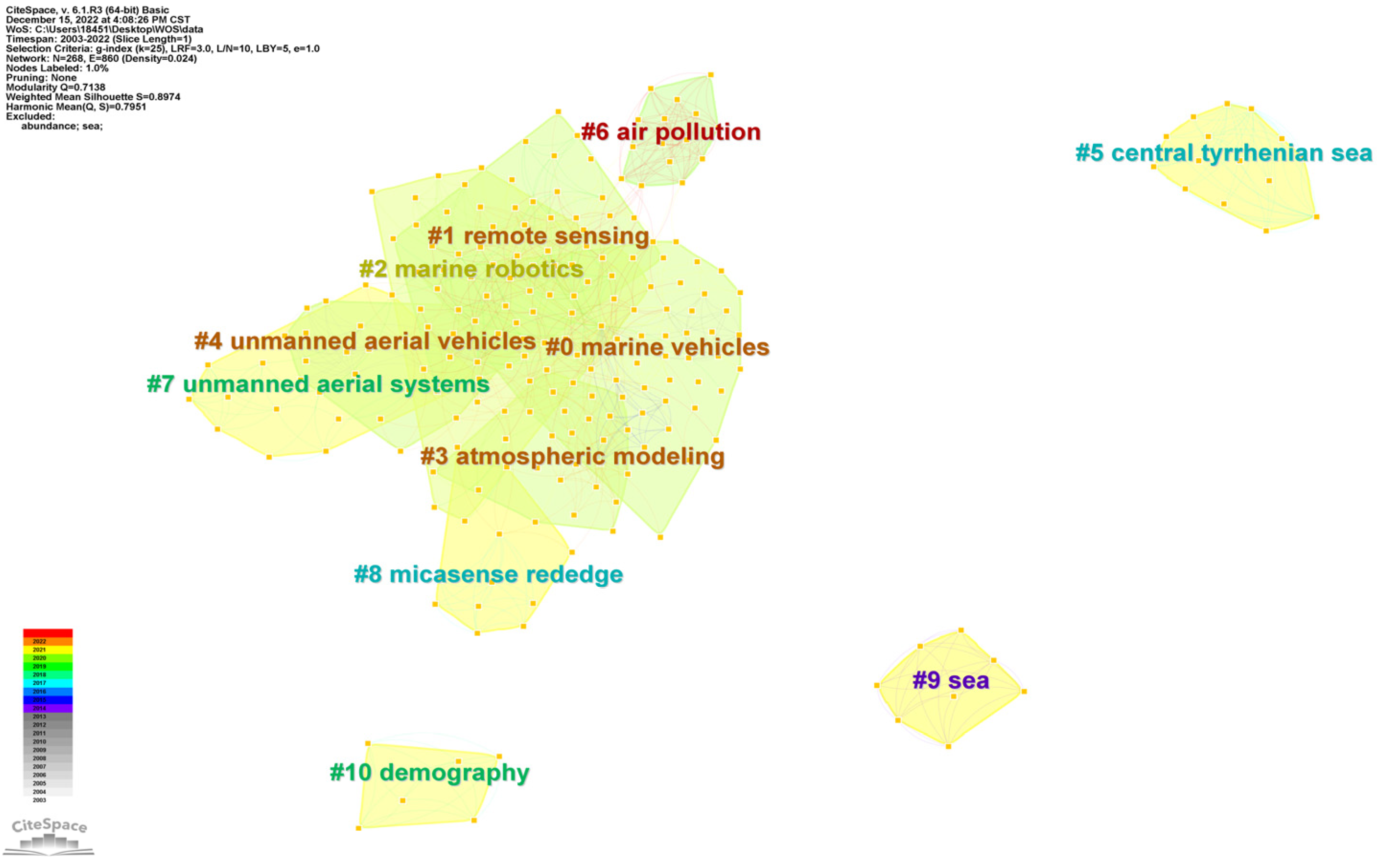
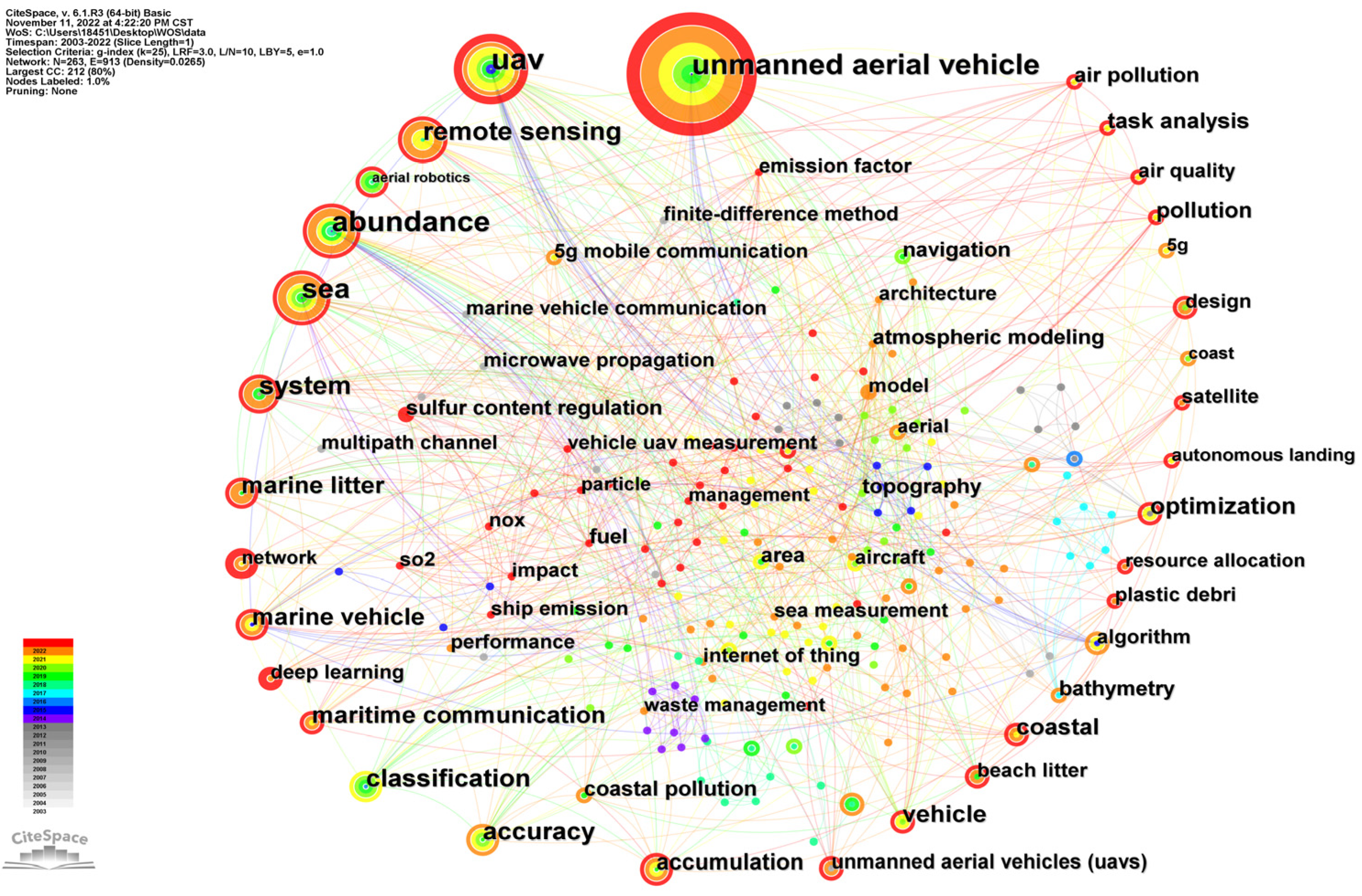
2.2. Documentary Scientometric Analysis and Knowledge Visualisation
2.3. Research Gaps and Solutions
3. Development and Different Applications of Drones in Maritime Transport
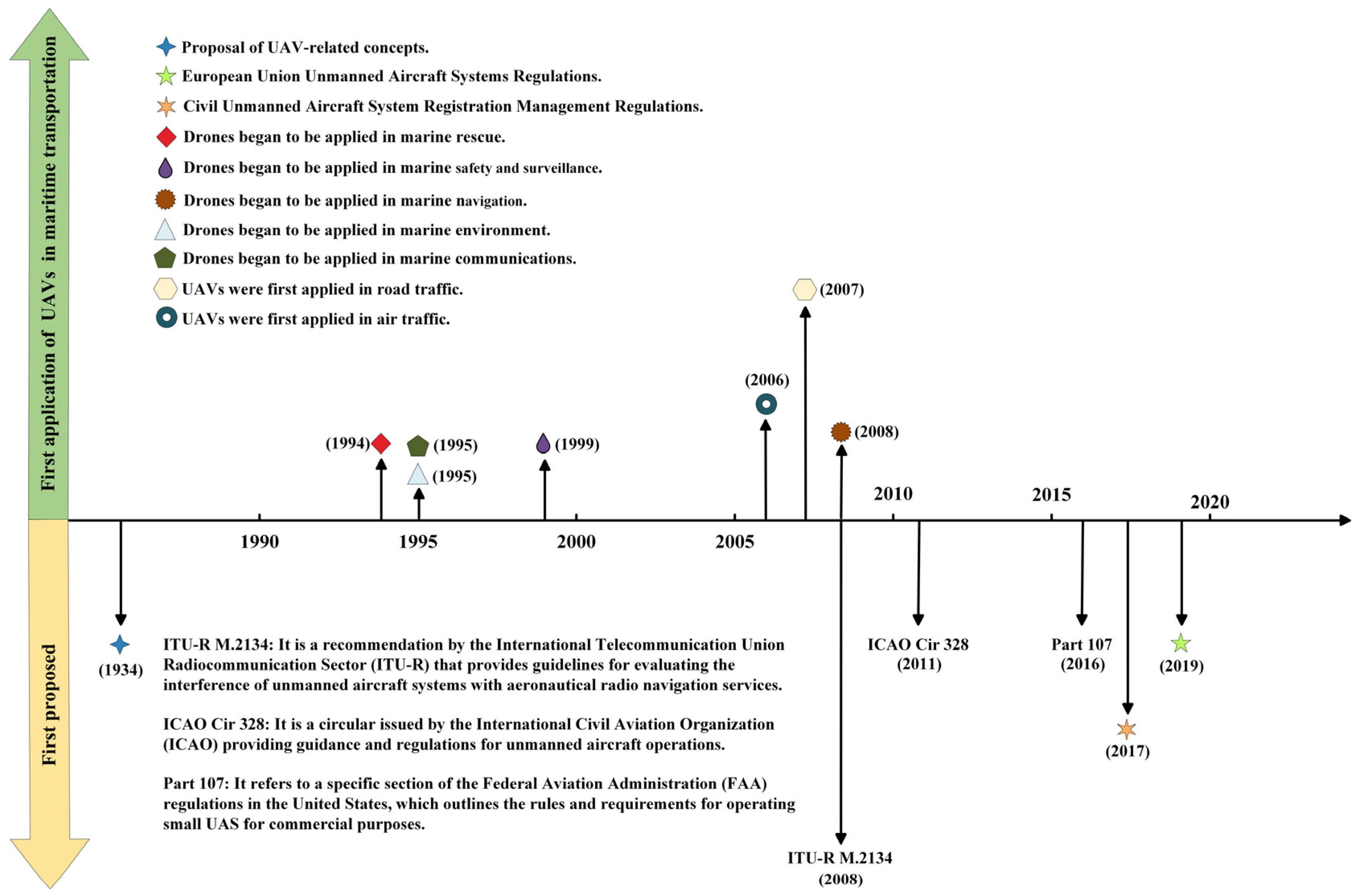
3.1. The Development Trends of Drones over Time
3.2. Marine Rescue
3.2.1. Delivery of Relief Supplies
3.2.2. Locating Rescue Targets
3.2.3. Search Path Planning
3.3. Marine Safety and Surveillance
3.3.1. Port Supervision and Facilities Maintenance
3.3.2. Marine Patrol
3.3.3. Vessel Inspections
3.4. Marine Environment
3.4.1. Ship Port Exhaust Monitoring Forensics
3.4.2. Coastal Zone Ecological Monitoring
3.5. Marine Communications
3.6. Military and Naval Applications
3.7. Anti-Piracy Applications
3.8. Augmented Reality Applications
3.9. Cargo Loading and Unloading
4. Challenges and Solutions of Using Drones in Maritime Transport
4.1. Technical Challenges of Using Drones and the Associated Solutions in Maritime Transport
4.1.1. Flight Control System
4.1.2. Navigation System
4.1.3. Power System
4.1.4. Communication System
4.1.5. Vision System
4.2. Challenges and Solutions Associated with the Use of Drones in Future Maritime Transport
4.2.1. Marine Rescue
4.2.2. Marine Safety and Surveillance
4.2.3. Marine Navigation
4.2.4. Marine Environment
4.2.5. Marine Communications
4.3. Implications from the Challenges and Solutions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, T.; Jiang, Z.; Dong, J.; Feng, H.; Yang, C. Multi agents to search and rescue based on group intelligent algorithm and edge computing. In Proceedings of the IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Halifax, NS, Canada, 30 July–3 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 389–394. [Google Scholar]
- Qian, L.P.; Zhang, H.; Wang, Q.; Wu, Y.; Lin, B. Joint Multi-Domain Resource Allocation and Trajectory Optimization in UAV-Assisted Maritime IoT Networks. IEEE Internet Things J. 2023, 10, 539–552. [Google Scholar] [CrossRef]
- Mittal, H.; Joshi, A. Automatic Ship Detection Using CFAR Algorithm for Quad-Pol UAV-SAR Imagery. In Proceedings of the Proceedings of Uasg 2021: Wings 4 Sustainability; Jain, K., Mishra, V., Pradhan, B., Eds.; Springer International Publishing Ag: Cham, Switzerland, 2023; Volume 304, pp. 199–210. [Google Scholar]
- Li, J.; Zhang, G.; Jiang, C.; Zhang, W. A Survey of Maritime Unmanned Search System: Theory, Applications and Future Directions. Ocean Eng. 2023, 285, 115359. [Google Scholar] [CrossRef]
- Chan, K.W.; Nirmal, U.; Cheaw, W.G. Progress on Drone Technology and Their Applications: A Comprehensive Review. In AIP Conference Proceedings; AIP Publishing: Ho Chi Minh, Vietnam, 2018; p. 020308. [Google Scholar]
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Thakkar, P.; Balaji, A.; Narwane, V.S. Intelligent Unmanned Aerial Vehicles. In Proceedings of International Conference on Intelligent Manufacturing and Automation; Vasudevan, H., Kottur, V.K.N., Raina, A.A., Eds.; Lecture Notes in Mechanical Engineering; Springer: Singapore, 2019; pp. 485–494. ISBN 9789811324895. [Google Scholar]
- Van’t Hof, A.; Nieh, J. AnDrone: Virtual Drone Computing in the Cloud. In Proceedings of the Fourteenth EuroSys Conference 2019, New York, NY, USA, 25–28 March 2019; ACM: Dresden, Germany, 2019; pp. 1–16. [Google Scholar]
- Sharma, J.; Mehra, P.S. Secure Communication in IOT-Based UAV Networks: A Systematic Survey. Internet Things 2023, 23, 100883. [Google Scholar] [CrossRef]
- Lyu, M.; Zhao, Y.; Huang, C.; Huang, H. Unmanned Aerial Vehicles for Search and Rescue: A Survey. Remote Sens. 2023, 15, 3266. [Google Scholar] [CrossRef]
- Colefax, A.P.; Butcher, P.A.; Pagendam, D.E.; Kelaher, B.P. Reliability of Marine Faunal Detections in Drone-Based Monitoring. Ocean Coast. Manag. 2019, 174, 108–115. [Google Scholar] [CrossRef]
- Jayson-Quashigah, P.-N.; Appeaning Addo, K.; Amisigo, B.; Wiafe, G. Assessment of Short-Term Beach Sediment Change in the Volta Delta Coast in Ghana Using Data from Unmanned Aerial Vehicles (Drone). Ocean Coast. Manag. 2019, 182, 104952. [Google Scholar] [CrossRef]
- Simões, R.S.; Calliari, L.J.; de Figueiredo, S.A.; de Oliveira, U.R.; de Almeida, L.P.M. Coastline Dynamics in the Extreme South of Brazil and Their Socio-Environmental Impacts. Ocean Coast. Manag. 2022, 230, 106373. [Google Scholar] [CrossRef]
- Tucker, J.P.; Colefax, A.P.; Santos, I.R.; Kelaher, B.P.; Pagendam, D.E.; Butcher, P.A. White Shark Behaviour Altered by Stranded Whale Carcasses: Insights from Drones and Implications for Beach Management. Ocean Coast. Manag. 2021, 200, 105477. [Google Scholar] [CrossRef]
- Roman, A.; Prasyad, H.; Oiry, S.; Davies, B.F.R.; Brunier, G.; Barille, L. Mapping Intertidal Oyster Farms Using Unmanned Aerial Vehicles (UAV) High-Resolution Multispectral Data. Estuar. Coast. SHELF Sci. 2023, 291, 108432. [Google Scholar] [CrossRef]
- Giusti, E.; Capria, A.; Saverino, A.L.; Gelli, S.; Munoz-Castaner, J.; Dosil, R.; Naya, J.; Menendez, J. A Drone-Based Multisensory Payload for Maritime Pollutants Detections. IEEE Aerosp. Electron. Syst. Mag. 2023, 38, 4–18. [Google Scholar] [CrossRef]
- Yuan, H.; Xiao, C.; Zhan, W.; Wang, Y.; Shi, C.; Ye, H.; Jiang, K.; Ye, Z.; Zhou, C.; Wen, Y.; et al. Target Detection, Positioning and Tracking Using New UAV Gas Sensor Systems: Simulation and Analysis. J. Intell. Robot. Syst. 2019, 94, 871–882. [Google Scholar] [CrossRef]
- Deng, M.; Peng, S.; Xie, X.; Jiang, Z.; Hu, J.; Qi, Z. A Diffused Mini-Sniffing Sensor for Monitoring SO2 Emissions Compliance of Navigating Ships. Sensors 2022, 22, 5198. [Google Scholar] [CrossRef] [PubMed]
- Peti, M.; Milas, A.; Krasevac, N.; Krizmancic, M.; Loncar, I.; Miskovic, N.; Bogdan, S. A Search Strategy and Vessel Detection in Maritime Environment Using Fixed-Wing UAVs. In Proceedings of the 2023 IEEE Underwater Technology, UT, Tokyo, Japan, 6–9 March 2023; IEEE: New York, NY, USA, 2023. [Google Scholar]
- Marques, M.M.; Lobo, V.; Aguiar, A.P.; Silva, J.E.; de Sousa, J.B.; Nunes, M.d.F.; Ribeiro, R.A.; Bernardino, A.; Cruz, G.; Marques, J.S. An Unmanned Aircraft System for Maritime Operations: The Automatic Detection Subsystem. Mar. Technol. Soc. J. 2021, 55, 38–49. [Google Scholar] [CrossRef]
- Jin, G.; Wei, J.-G.; Zhai, J.-S. Denoising of Maritime Unmanned Aerial Vehicles Photography Based on Guidance Correlation Pixel Sampling and Aggregation. IEEE Access 2022, 10, 40109–40118. [Google Scholar] [CrossRef]
- Leira, F.S.; Helgesen, H.H.; Johansen, T.A.; Fossen, T.I. Object Detection, Recognition, and Tracking from UAVs Using a Thermal Camera. J. Field Robot. 2021, 38, 242–267. [Google Scholar] [CrossRef]
- Hunt, K.; Agarwal, P.; Zhuang, J. On the Adoption of New Technology to Enhance Counterterrorism Measures: An Attacker-Defender Game with Risk Preferences. Reliab. Eng. Syst. Saf. 2022, 218, 108151. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, H.; Zhao, Y. YOLOv7-Sea: Object Detection of Maritime UAV Images Based on Improved YOLOv7. In Proceedings of the 2023 IEEE/CVF Winter Conference on Applications of Computer Vision Workshops (WACVW), Waikoloa, HI, USA, 3–7 January 2023; IEEE Computer Soc: Los Alamitos, CA, USA, 2023; pp. 233–238. [Google Scholar]
- Shen, L.; Wang, Y.; Liu, K.; Yang, Z.; Shi, X.; Yang, X.; Jing, K. Synergistic Path Planning of Multi-UAVs for Air Pollution Detection of Ships in Ports. Transp. Res. Part E Logist. Transp. Rev. 2020, 144, 102128. [Google Scholar] [CrossRef]
- Zhou, F.; Zhu, L.; Zou, J.; Bai, X. Tracking and Measuring Plumes from Sailing Ships Using an Unmanned Aerial Vehicle. IET Intell. Transp. Syst. 2023, 17, 285–294. [Google Scholar] [CrossRef]
- Yang, T.; Jiang, Z.; Sun, R.; Cheng, N.; Feng, H. Maritime Search and Rescue Based on Group Mobile Computing for Unmanned Aerial Vehicles and Unmanned Surface Vehicles. IEEE Trans. Ind. Inform. 2020, 16, 7700–7708. [Google Scholar] [CrossRef]
- Rahmes, M.; Chester, D.; Hunt, J.; Chiasson, B. Optimizing Cooperative Cognitive Search and Rescue UAVs; Dudzik, M., Ricklin, J., Eds.; SPIE: Orlando, FL, USA, 2018; Volume 10643. [Google Scholar]
- Ma, Y.; Li, B.; Huang, W.; Fan, Q. An Improved NSGA-II Based on Multi-Task Optimization for Multi-UAV Maritime Search and Rescue under Severe Weather. J. Mar. Sci. Eng. 2023, 11, 781. [Google Scholar] [CrossRef]
- Marques, M.M.; Carapau, R.S.; Rodrigues, A.V.; Lobo, V.; Gouveia-Carvalho, J.; Antunes, W.; Goncalves, T.; Duarte, F.; Verissimo, B. GammaEx Project: A Solution for CBRN Remote Sensing Using Unmanned Aerial Vehicles in Maritime Environments. In Proceeding of the OCEANS 2017—Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–6. [Google Scholar]
- Chamoso, P.; Perez, A.; Rodriguez, S.; Corchado, J.M.; Sempere, M.; Rizo, R.; Aznar, F.; Pujol, M. Modeling Oil-Spill Detection with Multirotor Systems Based on Multi-Agent Systems. In Proceeding of the 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 7–10 July 2014; pp. 1–8. [Google Scholar]
- Marques, M.M.; Lobo, V.; de Nunes, M.F.; Batista, R.; Almeida, J.; Ribeiro, R.; Bernardino, A. Oil Spills Detection: Challenges Addressed in the Scope of the SEAGULL Project. In Proceeding of OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar]
- Cruz, G.; Bernardino, A. Image Saliency Applied to Infrared Images for Unmanned Maritime Monitoring. In Proceedings of the Computer Vision Systems (ICVS 2015); Nalpantidis, L., Kruger, V., Eklundh, J.O., Gasteratos, A., Eds.; Springer: Berlin, Germany, 2015; Volume 9163, pp. 511–522. [Google Scholar]
- Pereira, E.; Beneatel, R.; Correia, J.; Felix, L.; Goncalves, G.; Morgado, J.; Sousa, J. Unmanned Air Vehicles for Coastal and Environmental Research. J. Coast. Res. 2009, 2, 1557–1561. [Google Scholar]
- Zhang, Y.; Lyu, J.; Fu, L. Energy-Efficient Cyclical Trajectory Design for UAV-Aided Maritime Data Collection in Wind. IEEE Trans. Wirel. Commun. 2022, 21, 10871–10886. [Google Scholar] [CrossRef]
- Andrade, F.A.A.; Storvold, R.; Johansen, T.A. Autonomous UAV Surveillance of a Ship’s Path with MPC for Maritime Situational Awareness. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; IEEE: New York, NY, USA, 2017; pp. 633–639. [Google Scholar]
- Gu, X.; Liu, T.; Yang, D.; Huang, K.; Tian, Y. Research on Application of Maritime Calibration Based on Fixed-Wing UAV. In Proceedings of the 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, 15–17 March 2019; Xu, B., Ed.; IEEE: New York, NY, USA, 2019; pp. 2585–2589. [Google Scholar]
- Helgesen, H.H.; Leira, F.S.; Bryne, T.H.; Albrektsen, S.M.; Johansen, T.A. Real-Time Georeferencing of Thermal Images Using Small Fixed-Wing UAVs in Maritime Environments. ISPRS J. Photogramm. Remote Sens. 2019, 154, 84–97. [Google Scholar] [CrossRef]
- Ghazali, S.N.A.M.; Anuar, H.A.; Zakaria, S.N.A.S.; Yusoff, Z. IEEE Determining Position of Target Subjects in Maritime Search and Rescue (MSAR) Operations Using Rotary Wing Unmanned Aerial Vehicles (UAVs). In Proceedings of the 2016 International Conference on Information and Communication Technology (ICICTM), Kuala Lumpur, MA, USA, 16–17 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–4. [Google Scholar]
- Raap, M.; Zsifkovits, M.; Pickl, S. Trajectory Optimization under Kinematical Constraints for Moving Target Search. Comput. Oper. Res. 2017, 88, 324–331. [Google Scholar] [CrossRef]
- Hohzaki, R.; Morimoto, T.; Omi, S. Flight Scheduling for the SH-60J Military Helicopter. Mil. Oper. Res. 2011, 16, 5–17. [Google Scholar] [CrossRef]
- Michele, T.; Antonio, D.; Madonia, M. Energy and Mission Optimization of an Airship by Constructal Design for Efficiency Method. In Proceedings of the Asme International Mechanical Engineering Congress and Exposition, Columbus, OH, USA, 15–21 November 2013; American Society Mechanical Engineers: New York, NY, USA, 2014; Volume 1, p. V001T01A021. [Google Scholar]
- Ribeiro, C.G.; Constantin Raptopoulos, L.S.; Dutra, M.S. An Autonomous Airship Swarm for Maritime Patrol. In Proceedings of the Developments and Advances in Defense and Security; Rocha, A., Pereira, R.P., Eds.; Springer: Berlin, Germany, 2020; Volume 152, pp. 307–320. [Google Scholar]
- Qi, S.; Wu, J.; Zhou, Q.; Kang, M. Low-Resolution Ship Detection from High-Altitude Aerial Images. In Proceedings of the Mippr 2017: Automatic Target Recognition and Navigation; Liu, J., Udupa, J.K., Hong, H., Eds.; SPIE, The International Society Optical Engineering: Bellingham, Australian, 2018; Volume 10608, p. 1060805. [Google Scholar]
- Cairns, W.R. AIS and Long Range Identification & Tracking. J. Navig. 2005, 58, 181–189. [Google Scholar] [CrossRef]
- Huba, T.; Huba, M. Autonomous Paracopter Control Design. In Proceedings of the Computer Aided Systems Theory—Eurocast 2015; MorenoDiaz, R., Pichler, F., QuesadaArencibia, A., Eds.; Springer International Publishing Ag: Cham, Germany, 2015; Volume 9520, pp. 95–102. [Google Scholar]
- Sivera, R.; Stasek, P.; Vorlicek, J.; Calta, L.; Kropik, P.; Karban, P. Advanced Paraglider Simulator Control System. In Proceedings of the 2021 22nd International Conference on Computational Problems of Electrical Engineering (CPEE), Hrádek u Sušice, Czech Republic, 15–17 September 2021; IEEE: New York, NY, USA, 2021. [Google Scholar]
- Huba, T.; Pestun, I.; Huba, M.; Huba, M. Learning by Pleasure—Powered Paraglider Control and Other UAVs Control. In Proceedings of the 2011 14th International Conference on Interactive Collaborative Learning, Piestany, Slovakia, 21–23 September 2011; IEEE: New York, NY, USA, 2011; pp. 548–552. [Google Scholar]
- Xin, H.; Qin, S.; Kai, L. Weihongliang Unmanned Aerial Vehicle (UVA) Bionic Wing Design and Performance Analysis. In Proceedings of the 2015 International Conference on Automation, Mechanical Control and Computational Engineering, Changsha, China, 24–25 October 2015; Cheng, A., DeSouza, A., Eds.; Atlantis Press: Paris, France, 2015; Volume 124, pp. 2031–2034. [Google Scholar]
- Hua, X.; Sun, G.; Zhang, C.; Shao, W.; Wang, P. Numerical Simulation Based on the Seagull Wing Unmanned Aircraft Airfoil. In Proceedings of the 2012 2nd International Conference on Applied Robotics for the Power Industry (CARPI), Zurich, Switzerland, 11–13 September 2012; IEEE: New York, NY, USA, 2012; pp. 363–366. [Google Scholar]
- Zhang, J.; Chen, B.S.; Hua, X. Based on the Orthogonal Experiment Optimization of UAV Wing Bionic Airfoil Design. In Proceedings of the Advances in Engineering Materials and Applied Mechanics; Zhang, G., Gao, Q., Xu, Q., Eds.; Crc Press-Taylor & Francis Group: Boca Raton, FL, USA, 2016; pp. 91–97. [Google Scholar]
- Ramadiansyah, M.L.; Utama, A.B.; Suseno, P.a.P.; Ramadhan, R.A.; Hidayat, K.; Septiyana, A.; Rizaldi, A.; Atmasari, N.; Jayanti, E.B. High Lift Analysis for Unmanned Aircraft LAPAN Surveillance UAV (LSU)-05 NG. In Proceedings of the 7th International Seminar on Aerospace Science and Technology—ISAST 2019; Putro, I.E., Kurniawati, F., Adi, A.P., Bahri, S., Eds.; American Institutes Physics: Melville, NY, USA, 2020; Volume 2226, p. 030013. [Google Scholar]
- Nithiyapathi, C.; Sreelakshmy, P.S.; Suman, M. Aerodynamic Characterization of an Albatross Wing for Bio-Inspired Unmanned Aerial Vehicle. Mater. Today Proc. 2021, 37, 1659–1664. [Google Scholar] [CrossRef]
- Merlino, S.; Paterni, M.; Berton, A.; Massetti, L. Unmanned Aerial Vehicles for Debris Survey in Coastal Areas: Long-Term Monitoring Programme to Study Spatial and Temporal Accumulation of the Dynamics of Beached Marine Litter. Remote Sens. 2020, 12, 1260. [Google Scholar] [CrossRef]
- Topouzelis, K.; Papakonstantinou, A.; Garaba, S.P. Detection of Floating Plastics from Satellite and Unmanned Aerial Systems (Plastic Litter Project 2018). Int. J. Appl. Earth Obs. Geoinf. 2019, 79, 175–183. [Google Scholar] [CrossRef]
- Fallati, L.; Polidori, A.; Salvatore, C.; Saponari, L.; Savini, A.; Galli, P. Anthropogenic Marine Debris Assessment with Unmanned Aerial Vehicle Imagery and Deep Learning: A Case Study along the Beaches of the Republic of Maldives. Sci. Total Environ. 2019, 693, 133581. [Google Scholar] [CrossRef]
- Gonçalves, G.; Andriolo, U.; Pinto, L.; Bessa, F. Mapping Marine Litter Using UAS on a Beach-Dune System: A Multidisciplinary Approach. Sci. Total Environ. 2020, 706, 135742. [Google Scholar] [CrossRef] [PubMed]
- Martin, C.; Parkes, S.; Zhang, Q.; Zhang, X.; McCabe, M.F.; Duarte, C.M. Use of Unmanned Aerial Vehicles for Efficient Beach Litter Monitoring. Mar. Pollut. Bull. 2018, 131, 662–673. [Google Scholar] [CrossRef] [PubMed]
- Colefax, A.P.; Butcher, P.A.; Kelaher, B.P. The Potential for Unmanned Aerial Vehicles (UAVs) to Conduct Marine Fauna Surveys in Place of Manned Aircraft. ICES J. Mar. Sci. 2018, 75, 1–8. [Google Scholar] [CrossRef]
- Joyce, K.E.; Duce, S.; Leahy, S.M.; Leon, J.; Maier, S.W.; Joyce, K.E.; Duce, S.; Leahy, S.M.; Leon, J.; Maier, S.W. Principles and Practice of Acquiring Drone-Based Image Data in Marine Environments. Mar. Freshw. Res. 2018, 70, 952–963. [Google Scholar] [CrossRef]
- Preliminary Annual Overview Of Marine Casualties And Incidents 2014–2020. Available online: https://www.emsa.europa.eu/publications/download/6557/4378/23.html (accessed on 2 October 2023).
- Annual Overview of Marine Casualties and Incidents 2021. Available online: https://www.emsa.europa.eu/publications/download/6955/4266/23.html (accessed on 2 October 2023).
- Annual Overview of Marine Casualties and Incidents 2022. Available online: https://www.emsa.europa.eu/publications/download/7362/4867/23.html (accessed on 2 October 2023).
- Estrada, M.A.R.; Ndoma, A. The Uses of Unmanned Aerial Vehicles -UAV’s- (or Drones) in Social Logistic: Natural Disasters Response and Humanitarian Relief Aid. In Proceedings of the ICTE in Transportation and Logistics 2018 (ICTE 2018); Ginters, E., Paulauskas, V., Estrada, M.A.R., Eds.; Elsevier Science Bv: Amsterdam, The Netherlands, 2019; Volume 149, pp. 375–383. [Google Scholar]
- Zailani, M.A.H.; Sabudin, R.Z.A.R.; Rahman, R.A.; Saiboon, I.M.; Ismail, A.; Mahdy, Z.A. Drone for Medical Products Transportation in Maternal Healthcare A Systematic Review and Framework for Future Research. Medicine 2020, 99, e21967. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Yang, L.T.; Meng, D.; Dong, M.; Ota, K.; Wang, H. Multi-UAV Cooperative Localization for Marine Targets Based on Weighted Subspace Fitting in SAGIN Environment. IEEE Internet Things J. 2022, 9, 5708–5718. [Google Scholar] [CrossRef]
- Zheng, R.; Yang, R.; Lu, K.; Zhang, S. A Search and Rescue System for Maritime Personnel in Disaster Carried on Unmanned Aerial Vehicle. In Proceedings of the 2019 18th International Symposium on Distributed Computing and Applications for Business Engineering and Science (Dcabes 2019), Wuhan, China, 8–10 November 2019; Yucheng, G., Ed.; IEEE: New York, NY, USA, 2019; pp. 43–47. [Google Scholar]
- Cho, S.-W.; Park, J.-H.; Park, H.-J.; Kim, S. Multi-UAV Coverage Path Planning Based on Hexagonal Grid Decomposition in Maritime Search and Rescue. Mathematics 2022, 10, 83. [Google Scholar] [CrossRef]
- Ai, B.; Jia, M.; Xu, H.; Xu, J.; Wen, Z.; Li, B.; Zhang, D. Coverage Path Planning for Maritime Search and Rescue Using Reinforcement Learning. Ocean Eng. 2021, 241, 110098. [Google Scholar] [CrossRef]
- Gallegos, A.-J.; Pertusa, A.; Gil, P.; Fisher, R.B. Detection of Bodies in Maritime Rescue Operations Using Unmanned Aerial Vehicles with Multispectral Cameras. J. Field Robot. 2019, 36, 782–796. [Google Scholar] [CrossRef]
- Lee, S.; Morrison, J.R. IEEE Decision Support Scheduling for Maritime Search and Rescue Planning with a System of UAVs and Fuel Service Stations. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1168–1177. [Google Scholar]
- Jofre-Briceno, C.; Munoz-La Rivera, F.; Atencio, E.; Herrera, R.F. Implementation of Facility Management for Port Infrastructure through the Use of UAVs, Photogrammetry and BIM. Sensors 2021, 21, 6686. [Google Scholar] [CrossRef] [PubMed]
- Cho, J.; Lim, G.; Biobaku, T.; Kim, S.; Parsaei, H. Safety and Security Management with Unmanned Aerial Vehicle (UAV) in Oil and Gas Industry. Procedia Manuf. 2015, 3, 1343–1349. [Google Scholar] [CrossRef]
- Lu, Y.; Guo, J.; Guo, S.; Fu, Q.; Xu, J. Study on Marine Fishery Law Enforcement Inspection System Based on Improved YOLO V5 with UAV. In Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation (ICMA), Guangxi, China, 7–10 August 2022; pp. 253–258. [Google Scholar]
- Paszotta, Z.; Szumilo, M.; Szulwic, J. Internet Photogrammetry for Inspection of Seaports. Pol. Marit. Res. 2017, 24, 174–181. [Google Scholar] [CrossRef]
- Stein, M. Conducting Safety Inspections of Container Gantry Cranes Using Unmanned Aerial Vehicles. In Proceedings of the Dynamics in Logistics; Freitag, M., Kotzab, H., Pannek, J., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 154–161. [Google Scholar]
- Tang, G.; Liu, P.; Hou, Z.; Claramunt, C.; Zhou, P. Motion Planning of UAV for Port Inspection Based on Extended RRT* Algorithm. J. Mar. Sci. Eng. 2023, 11, 702. [Google Scholar] [CrossRef]
- Kim, J.; Oh, H.; Yu, B.; Kim, S. Optimal Task Assignment for UAV Swarm Operations in Hostile Environments. Int. J. Aeronaut. Space Sci. 2021, 22, 456–467. [Google Scholar] [CrossRef]
- Panico, A.; Fragonara, L.Z.; Al-Rubaye, S. Adaptive Detection Tracking System for Autonomous UAV Maritime Patrolling. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 539–544. [Google Scholar]
- Jain, U.; Rogers, M.; Matson, E.T. Drone Forensic Framework: Sensor and Data Identification and Verification. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017; pp. 1–6. [Google Scholar]
- Li, X.; Han, Y.; Yu, F.-J.; Chen, G. Multi-Sensor Data Real-Time Monitoring and Management System Based on Onboard UAV for Ocean Observation. In Proceedings of the 2016 4th International Conference on Machinery, Materials and Information Technology Applications, Xi’an, China, 10–11 December 2016; Fang, Y., Xin, Y., Eds.; Atlantis Press: Paris, France, 2016; Volume 71, pp. 174–181. [Google Scholar]
- Yang, Z.; Yu, X.; Dedman, S.; Rosso, M.; Zhu, J.; Yang, J.; Xia, Y.; Tian, Y.; Zhang, G.; Wang, J. UAV Remote Sensing Applications in Marine Monitoring: Knowledge Visualization and Review. Sci. Total Environ. 2022, 838, 155939. [Google Scholar] [CrossRef] [PubMed]
- Parameswaran, S.; Lane, C.; Bagnall, B.; Buck, H. Marine Object Detection in UAV Full-Motion Video. In Airborne Intelligence, Surveillance, Reconnaissance (ISR) Systems and Applications XI; Henry, D., Lange, D., VonBerg, D., Rajan, S., Walls, T., Young, D., Eds.; SPIE: Bellingham, WA, USA, 2014; Volume 9076. [Google Scholar]
- Primeau, N.; Abielmona, R.; Falcon, R.; Petriu, E. Maritime Smuggling Detection and Mitigation Using Risk-Aware Hybrid Robotic Sensor Networks. In Proceeding of the IEEE Conference on Cognitive and Computational Aspects of Situation Management (CogSIMA), Savannah, GA, USA, 27–31 March 2017; pp. 1–7. [Google Scholar]
- Amaral, G.; Silva, H.; Lopes, F.; Ribeiro, J.P.; Freitas, S.; Almeida, C.; Martins, A.; Almeida, J.; Silva, E. UAV Cooperative Perception for Target Detection and Tracking in Maritime Environment. In Proceeding of the OCEANS 2017-Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–6. [Google Scholar]
- Ortiz, A.; Bonnin-Pascual, F.; Garcia-Fidalgo, E.; Company-Corcoles, J.P. Vision-Based Corrosion Detection Assisted by a Micro-Aerial Vehicle in a Vessel Inspection Application. Sensors 2016, 16, 2118. [Google Scholar] [CrossRef] [PubMed]
- Andersen, R.E.; Nalpantidis, L.; Boukas, E. Vessel Classification Using A Regression Neural Network Approach. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4480–4486. [Google Scholar]
- Grippa, P.; Renzaglia, A.; Rochebois, A.; Schranz, M.; Simonin, O. Inspection of Ship Hulls with Multiple UAVs: Exploiting Prior Information for Online Path Planning. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; pp. 13777–13784. [Google Scholar]
- Saute, B.; Gagnon, J.-P.; Lariviere-Bastien, M.; Hogan-Lamarre, P.; Chamberland, M. Quantitative Gas Imaging of Cargo Ship Emissions Using Thermal Infrared Hyperspectral Imaging. In Proceedings of the Infrared Technology and Applications XLVIII; Andresen, B.F., Fulop, G.F., Zheng, L., Eds.; Spie-Int Soc Optical Engineering: Bellingham, WA, USA, 2022; Volume 12107, p. 121071G. [Google Scholar]
- Zhou, F.; Pan, S.; Chen, W.; Ni, X.; An, B. Monitoring of Compliance with Fuel Sulfur Content Regulations through Unmanned Aerial Vehicle (UAV) Measurements of Ship Emissions. Atmos. Meas. Tech. 2019, 12, 6113–6124. [Google Scholar] [CrossRef]
- Shen, L.; Hou, Y.; Yang, Q.; Lv, M.; Dong, J.-X.; Yang, Z.; Li, D. Synergistic Path Planning for Ship-Deployed Multiple UAVs to Monitor Vessel Pollution in Ports. Transp. Res. Part Transp. Environ. 2022, 110, 103415. [Google Scholar] [CrossRef]
- Zhou, F.; Hou, L.; Zhong, R.; Chen, W.; Ni, X.; Pan, S.; Zhao, M.; An, B. Monitoring the Compliance of Sailing Ships with Fuel Sulfur Content Regulations Using Unmanned Aerial Vehicle (UAV) Measurements of Ship Emissions in Open Water. Atmos. Meas. Tech. 2020, 13, 4899–4909. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, J.; Zhang, J. Analysis of Unmanned Aerial Vehicle (UAV) Hyperspectral Remote Sensing Monitoring Key Technology in Coastal Wetland. In Proceedings of the Selected Papers of the Photoelectronic Technology Committee Conferences Held November 2015; Lv, Y., Bao, W., Eds.; SPIE, The International Society Optical Engineering: Bellingham, WA, USA, 2016; Volume 9796, p. 97962S. [Google Scholar]
- Trasvina-Moreno, C.A.; Blasco, R.; Marco, A.; Casas, R.; Trasvina-Castro, A. Unmanned Aerial Vehicle Based Wireless Sensor Network for Marine-Coastal Environment Monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef] [PubMed]
- Octavian, A.; Jatmiko, W. Designing Intelligent Coastal Surveillance Based on Big Maritime Data. In Proceedings of the 2020 International Workshop on Big Data and Information Security (IWBIS), Depok, Indonesia, 17–18 October 2020; IEEE: New York, NY, USA, 2020; pp. 1–7. [Google Scholar]
- Faria, M.; Pinto, J.; Py, F.; Fortuna, J.; Dias, H.; Martins, R.; Leira, F.; Johansen, T.A.; Sousa, J.; Rajan, K. Coordinating UAVs and AUVs for Oceanographic Field Experiments: Challenges and Lessons Learned. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: New York, NY, USA, 2014; pp. 6606–6611. [Google Scholar]
- Stokes, H.J.; Mortimer, J.A.; Laloe, J.-O.; Hays, G.C.; Esteban, N. Synergistic Use of UAV Surveys, Satellite Tracking Data, and Mark-Recapture to Estimate Abundance of Elusive Species. Ecosphere 2023, 14, e4444. [Google Scholar] [CrossRef]
- Gao, Z.; Liu, B.; Cheng, Z.; Chen, C.; Huang, L. Marine Mobile Wireless Channel Modeling Based on Improved Spatial Partitioning Ray Tracing. China Commun. 2020, 17, 1–11. [Google Scholar] [CrossRef]
- Xu, Z. Application Research of Tethered UAV Platform in Marine Emergency Communication Network. J. Web Eng. 2021, 20, 491–511. [Google Scholar] [CrossRef]
- Tang, R.; Feng, W.; Chen, Y.; Ge, N. NOMA-Based UAV Communications for Maritime Coverage Enhancement. China Commun. 2021, 18, 230–243. [Google Scholar] [CrossRef]
- Ham, A.; Similien, D.; Baek, S.; York, G. Unmanned Aerial Vehicles (UAVs): Persistent Surveillance for a Military Scenario. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 1411–1417. [Google Scholar]
- De Freitas, E.; Heimfarth, T.; Vinel, A.; Wagner, F.; Pereira, C.; Larsson, T. Cooperation among Wirelessly Connected Static and Mobile Sensor Nodes for Surveillance Applications. Sensors 2013, 13, 12903–12928. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Xu, J.; Zhong, L. Limited Intervention Collaborative Decision Making of MAV-UAV Team Based on VFCM. In Proceedings of the 2016 IEEE International Conference on Services Computing (SCC), San Francisco, CA, USA, 27 June–2 July 2016; IEEE: San Francisco, CA, USA, 2016; pp. 876–879. [Google Scholar]
- Saffre, F.; Hildmann, H.; Karvonen, H.; Lind, T. Self-Swarming for Multi-Robot Systems Deployed for Situational Awareness. In Proceedings of the New Developments and Environmental Applications of Drones; Lipping, T., Linna, P., Narra, N., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 51–72. [Google Scholar]
- Zhang, S.; Duan, H. Multiple UCAVs Target Assignment via Bloch Quantum-Behaved Pigeon-Inspired Optimization. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 6936–6941. [Google Scholar]
- Kaymal, T. Unmanned Aircraft Systems for Maritime Operations Chossing “a” Good Design for Achieving Operational Effectiveness. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (icuas), Arlington, TX, USA, 7–10 June 2016; IEEE: New York, NY, USA, 2016; pp. 763–768. [Google Scholar]
- Shih, N.-J.; Qiu, Y.-H. Resolving the Urban Dilemma of Two Adjacent Rivers through a Dialogue between GIS and Augmented Reality (AR) of Fabrics. Remote Sens. 2022, 14, 4330. [Google Scholar] [CrossRef]
- Boisvert, J.; Drouin, M.-A.; Godin, G.; Picard, M. Augmented Reality, 3D Measurement, and Thermal Imagery for Computer-Assisted Manufacturing. In Proceedings of the Emerging Digital Micromirror Device Based Systems and Applications XII; Lee, B.L., Ehmke, J., Eds.; SPIE: San Francisco, CA, USA, 2020; pp. 108–115. [Google Scholar]
- Brandao, A.S.; Smrcka, D.; Pairet, E.; Nascimento, T.; Saska, M. Side-Pull Maneuver: A Novel Control Strategy for Dragging a Cable-Tethered Load of Unknown Weight Using a UAV. IEEE Robot. Autom. Lett. 2022, 7, 9159–9166. [Google Scholar] [CrossRef]
- Segvic, M.; Krajcek, K.; Ivanjko, E. Technologies for Distributed Flight Control Systems: A Review. In Proceedings of the 2015 38th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO); Biljanovic, P., Butkovic, Z., Skala, K., Mikac, B., Cicin-Sain, M., Sruk, V., Ribaric, S., Gros, S., Vrdoljak, B., Mauher, M., et al., Eds.; IEEE: New York, NY, USA, 2015; pp. 1060–1065. [Google Scholar]
- Tan, J.; Fan, Y.; Yan, P.; Wang, C.; Feng, H. Sliding Mode Fault Tolerant Control for Unmanned Aerial Vehicle with Sensor and Actuator Faults. Sensors 2019, 19, 643. [Google Scholar] [CrossRef]
- Li, Y.; Li, S.; Zhang, Y.; Zhang, W.; Lu, H. Dynamic Route Planning for a USV-UAV Multi-Robot System in the Rendezvous Task with Obstacles. J. Intell. Robot. Syst. 2023, 107, 52. [Google Scholar] [CrossRef]
- Ross, J.; Seto, M.; Johnston, C. Autonomous Landing of Rotary Wing Unmanned Aerial Vehicles on Underway Ships in a Sea State. J. Intell. Robot. Syst. 2022, 104, 1–9. [Google Scholar] [CrossRef]
- Pritzl, V.; Vrba, M.; Stepan, P.; Saska, M. Cooperative Navigation and Guidance of a Micro-Scale Aerial Vehicle by an Accompanying UAV Using 3D LiDAR Relative Localization. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; IEEE: New York, NY, USA, 2022; pp. 526–535. [Google Scholar]
- Krasuski, K.; Wierzbicki, D.; Bakula, M. Improvement of UAV Positioning Performance Based on EGNOS plus SDCM Solution. Remote Sens. 2021, 13, 2597. [Google Scholar] [CrossRef]
- Li, K.; Wang, X.; Liu, Z. Recovery and Guidance Technology of Collision Network Based on Multi-Source Information Fusion. In Proceedings of the 2020 2nd International Conference on Computer Science Communication and Network Security (CSCNS2020), Sanya, China, 22–23 December 2020; Barukcic, I., Ed.; E D P Sciences: Les Ulis, France, 2021; Volume 336, p. 04003. [Google Scholar]
- Wang, Y.; Shi, Y.; Cai, M.; Xu, W.; Pan, T.; Yu, Q. Study of Fuel-Controlled Aircraft Engine for Fuel-Powered Unmanned Aerial Vehicle: Energy Conversion Analysis and Optimization. IEEE Access 2019, 7, 109246–109258. [Google Scholar] [CrossRef]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A Critical Review on Unmanned Aerial Vehicles Power Supply and Energy Management: Solutions, Strategies, and Prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Zhu, T.; Zhao, L.; Yin, J. Research on Longitudinal Control Based on UAV Flight Load Test Technology. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; IEEE: New York, NY, USA, 2020; pp. 885–890. [Google Scholar]
- Ismail, M.A.A.; Wiedemann, S.; Bosch, C.; Stuckmann, C. Design and Evaluation of Fault-Tolerant Electro-Mechanical Actuators for Flight Controls of Unmanned Aerial Vehicles. Actuators 2021, 10, 175. [Google Scholar] [CrossRef]
- Rohacs, J.; Kale, U.; Rohacs, D. Radically New Solutions for Reducing the Energy Use by Future Aircraft and Their Operations. Energy 2022, 239, 122420. [Google Scholar] [CrossRef]
- Angjo, J.; Shayea, I.; Ergen, M.; Mohamad, H.; Alhammadi, A.; Daradkeh, Y.I. Handover Management of Drones in Future Mobile Networks: 6G Networks. IEEE Access 2021, 9, 12803–12823. [Google Scholar] [CrossRef]
- Sharma, V.; Sabatini, R.; Ramasamy, S. UAVs Assisted Delay Optimization in Heterogeneous Wireless Networks. IEEE Commun. Lett. 2016, 20, 2526–2529. [Google Scholar] [CrossRef]
- Jung, H.; Lee, I.-H.; Joung, J. Security Energy Efficiency Analysis of Analog Collaborative Beamforming With Stochastic Virtual Antenna Array of UAV Swarm. IEEE Trans. Veh. Technol. 2022, 71, 8381–8397. [Google Scholar] [CrossRef]
- Li, C.; Xu, Y.; Xia, J.; Zhao, J. Protecting Secure Communication Under UAV Smart Attack With Imperfect Channel Estimation. IEEE Access 2018, 6, 76395–76401. [Google Scholar] [CrossRef]
- Psilias, D.; Milidonis, A.; Voyiatzis, I. Secure Video Transmission System for UAV Applications. In Proceedings of the PCI ’21: Proceedings of the 25th Pan-Hellenic Conference on Informatics, Athens, Greece, 25–27 November 2022; Vassilakopoulos, M.G., Karanikolas, N.N., Eds.; Association Computing Machinery: New York, NY, USA, 2021; pp. 318–322. [Google Scholar]
- Bai, J.; Dai, J.; Wang, Z.; Yang, S. A Detection Method of the Rescue Targets in the Marine Casualty Based on Improved YOLOv5s. Front. Neurorobot. 2022, 16, 1053124. [Google Scholar] [CrossRef] [PubMed]
- Chen, N.; Li, Y.; Yang, Z.; Lu, Z.; Wang, S.; Wang, J. LODNU: Lightweight Object Detection Network in UAV Vision. J. Supercomput. 2023, 79, 10117–10138. [Google Scholar] [CrossRef]
- Ferrão, I.G.; Espes, D.; Dezan, C.; Branco, K.R.L.J.C. Security and Safety Concerns in Air Taxis: A Systematic Literature Review. Sensors 2022, 22, 6875. [Google Scholar] [CrossRef] [PubMed]
- Herschel, R.; Wallrath, P.; Hofstaetter, M.; Taupe, P.; Krueger, E.; Philippi, M.; Kunze, J.; Rotter, J.M.; Heusinger, V.; Ari, M.; et al. UAV-Borne Remote Sensing for AI-Assisted Support of Search and Rescue Missions. In Proceedings of the Electro-Optical Remote Sensing XVI; Kamerman, G.W., Steinvall, O., Eds.; Spie-The International Society Optical Engineering: Bellingham, WA, USA, 2022; Volume 12272, p. 1227203. [Google Scholar]
- Carrillo, D.; Mikhaylov, K.; Nardelli, P.J.; Andreev, S.; da Costa, D.B. Understanding UAV-Based WPCN-Aided Capabilities for Offshore Monitoring Applications. IEEE Wirel. Commun. 2021, 28, 114–120. [Google Scholar] [CrossRef]
- Liu, C.; Feng, W.; Chen, Y.; Wang, C.-X.; Li, X.; Ge, N. IEEE Process-Oriented Optimization for Beyond 5G Cognitive Satellite-UAV Networks. In Proceedings of the 2020 29th Wireless and Optical Communications Conference (WOCC), Newark, NJ, USA, 1–2 May 2020; pp. 145–150. [Google Scholar]
- Jurado, J.M.; Lopez, A.; Padua, L.; Sousa, J.J. Remote Sensing Image Fusion on 3D Scenarios: A Review of Applications for Agriculture and Forestry. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102856. [Google Scholar] [CrossRef]
- Zhao, J.; Chen, Y.; Zhou, Z.; Zhao, J.; Wang, S.; Chen, X. Multiship Speed Measurement Method Based on Machine Vision and Drone Images. IEEE Trans. Instrum. Meas. 2023, 72, 2513112. [Google Scholar] [CrossRef]
- Zhao, J.; Chen, Y.; Zhou, Z.; Zhao, J.; Wang, S.; Chen, X. Extracting Vessel Speed Based on Machine Learning and Drone Images during Ship Traffic Flow Prediction. J. Adv. Transp. 2022, 2022, 3048611. [Google Scholar] [CrossRef]
- Santos, N.P.; Lobo, V.; Bernardino, A. Autoland Project: Fixed-Wing UAV Landing on a Fast Patrol Boat Using Computer Vision. In OCEANS 2019 MTS/IEEE SEATTLE; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Zhou, F.; Pan, S.; Jiang, J. Verification of AIS Data by Using Video Images Taken by a UAV. J. Navig. 2019, 72, 1345–1358. [Google Scholar] [CrossRef]
- Lindsay, J.; Ross, J.; Seto, M.L.; Gregson, E.; Moore, A.; Patel, J.; Bauer, R. Collaboration of Heterogeneous Marine Robots Toward Multidomain Sensing and Situational Awareness on Partially Submerged Targets. IEEE J. Ocean. Eng. 2022, 47, 880–894. [Google Scholar] [CrossRef]
- Siewert, S.; Angoth, V.; Krishnamurthy, R.; Mani, K.; Mock, K.; Singh, S.B.; Srivistava, S.; Wagner, C.; Claus, R.; Vis, M.D. Software Defined Multi-Spectral Imaging for Arctic Sensor Networks. In Proceedings of the Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XXII; Velez Reyes, M., Messinger, D.W., Eds.; Spie-The International Society Optical Engineering: Bellingham, WA, USA, 2016; Volume 9840, p. 98401V. [Google Scholar]
- Guo, J.; Gao, H.; Liu, Z.; Huang, F.; Zhang, J.; Li, X.; Ma, J. ICRA: An Intelligent Clustering Routing Approach for UAV Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2447–2460. [Google Scholar] [CrossRef]
- Dai, M.; Wu, Y.; Qian, L.; Su, Z.; Lin, B.; Chen, N. UAV-Assisted Multi-Access Computation Offloading via Hybrid NOMA and FDMA in Marine Networks. IEEE Trans. Netw. Sci. Eng. 2023, 10, 113–127. [Google Scholar] [CrossRef]
- Gomez, L.; Ibrahim, A.S.S. Design, Analysis and Simulation of Microstrip Antenna Arrays with Flexible Substrate in Different Frequency, for Use in UAV-Assisted Marine Communications. J. Mar. Sci. Eng. 2023, 11, 730. [Google Scholar] [CrossRef]
- Guo, F.; Wei, M.; Ye, M.; Li, J.; Mechali, O.; Cao, Y. An Unmanned Aerial Vehicles Collaborative Searching and Tracking Scheme in Three-Dimension Space. In Proceedings of the 2019 IEEE 9th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Suzhou, China, 29 July–2 August 2019; IEEE: New York, NY, USA, 2019; pp. 1262–1266. [Google Scholar]
- Liu, J.; Shi, T.; Li, P.; Ren, X.; Ma, H. Trajectories Planning for Multiple UAVs by the Cooperative and Competitive PSO Algorithm. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; IEEE: New York, NY, USA, 2015; pp. 107–114. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Categories | References | Characteristics | Advantages | Disadvantages | Applications |
|---|---|---|---|---|---|
| Fixed-wing drones | [33,34,35,36,37,38] | Fixed-wing positions, swept-back angles, and simplified maintenance. | 1. Higher flight speeds; 2. Longer flight times; 3. Ability to accommodate larger sensors and cameras; 4. Expanded range of applications. | 1. Require larger take-off and landing sites; 2. Lack of hovering capabilities, limiting continuous image capture. | 1. Marine patrols; 2. Marine violation identification; 3. Real-time reporting to ground control stations; 4. Ship escorting. |
| Rotary-wing drones | [18,39,40,41] | 1. Feature rotor shafts for lift generation; 2. Obtain lift from continuously rotating blades; 3. Similar to helicopters in their lift-off principle. | 1. Vertical take-off and landing capabilities; 2. Ability to hover for precise image capture and data collection in specific areas | 1. More complex maintenance compared to fixed-wing drones; 2. Limited endurance, resulting in slower flight speed and reduced range. | 1. Marine monitoring; 2. Marine rescue operations; 3. Pollution forensics. |
| Unmanned airships | [42,43,44,45] | 1. Utilise internal gas lighter than air; 2. Consist of a hull, tail surface, pod, and propulsion unit; 3. Use the same lift-off principle as balloons but capable of powered flight and manoeuvring. | 1. Long endurance due to reliance on lift principles, not limited by fuel; 2. Convenient departure and docking without requiring take-off or landing. | 1. Vulnerable to high winds due to lighter-than-air nature; 2. Crosswinds can deplete their fuel; 3. Slower flight speeds due to larger size and greater air resistance. | 1. Extended missions such as port and maritime patrols; 2. Functioning as command centres for port and rescue operations; 3. Overseeing ships arriving in port from the air; 4. Scanning entire accident sites during significant maritime disasters. |
| Para-wing drones | [46,47,48] | 1. Employ a flexible air-foil made of a stamped wing parachute; 2. Use a propeller engine for propulsion; 3. Reduced weight for longer flight times. | 1. Longer flight times due to reduced weight; 2. Ability to glide effortlessly in complex air currents at low altitudes; 3. Versatile launch methods; 4. Capability to take off and land on challenging runways. | 1. Limited flight altitude due to lower lift provided by the stamped wing parachute. | 1. Transportation of marine rescue supplies. |
| Fluttering drones | [49,50,51,52,53] | 1. Mimic flight patterns of birds or insects; 2. Can be classified into insect-like or bird-like designs. | 1. High mobility and integration with corresponding sensors; 2. Potential to be communication relays and monitor the marine environment. | 1. Bird-like drones require consideration of range and lift. | 1. Maritime military field, especially for long-range observation and night surveillance; 2. Protection of the marine environment; 3. Ensuring maritime security. |
| Number of the Papers | Country | Centrality |
|---|---|---|
| 68 | China | 0.25 |
| 20 | USA | 0.26 |
| 17 | England | 0.23 |
| 16 | Australia | 0.09 |
| 15 | South Korea | 0.01 |
| 14 | Spain | 0.25 |
| 14 | Canada | 0.02 |
| 12 | Italy | 0.11 |
| 9 | Portugal | 0.11 |
| 8 | Germany | 0.08 |
| Year | Frequent | Centrality | Keyword |
|---|---|---|---|
| 2009 | 12 | 0.23 | System |
| 2012 | 73 | 0.61 | Unmanned aerial vehicle |
| 2012 | 6 | 0.04 | Optimization |
| 2014 | 8 | 0.04 | Marine vehicle |
| 2015 | 7 | 0.10 | Classification |
| 2017 | 19 | 0.14 | Remote sensing |
| 2018 | 10 | 0.09 | Marine litter |
| 2019 | 6 | 0.05 | Vehicle |
| 2019 | 6 | 0.02 | Design |
| 2020 | 9 | 0.02 | Network |
| 2020 | 7 | 0.04 | Maritime communication |
| 2020 | 6 | 0.04 | Coastal |
| 2021 | 8 | 0.03 | Deep learning |
| 2021 | 6 | 0.03 | Model |
| Cluster | Size | Silhouette Coefficient | Year | Top Terms (LLR) |
|---|---|---|---|---|
| #0 | 51 | 0.909 | 2018 | Marine vehicles |
| #1 | 42 | 0.813 | 2019 | Remote sensing |
| #2 | 23 | 0.867 | 2019 | Marine robotics |
| #3 | 21 | 0.943 | 2020 | Atmospheric modelling |
| #4 | 19 | 0.921 | 2013 | UAVs |
| Citation Count | Reference | Title |
|---|---|---|
| 15 | Gonçalves et al. (2020) [57] | Mapping marine litter using Unmanned Aircraft System (UAS) on a beach-dune system: A multidisciplinary approach |
| 15 | Fallati et al. (2019) [56] | Anthropogenic Marine Debris assessment with Unmanned Aerial Vehicle imagery and deep learning: A case study along the beaches of the Republic of Maldives |
| 15 | Topouzelis et al. (2019) [55] | Detection of floating plastics from satellite and unmanned aerial systems (Plastic Litter Project 2018) |
| 12 | Colefax et al. (2018) [59] | The potential for UAVs to conduct marine fauna surveys in place of manned aircraft |
| 12 | Martin et al. (2018) [58] | Use of UAVs for efficient beach litter monitoring |
| System | Challenges | Solutions |
|---|---|---|
| Flight control system | 1. Limitations of fault-tolerant control laws with restricted control inputs 2. Inadequate infrastructure at sea for UAV recovery | 1. Develop control algorithms that can effectively deal with the physical properties of the actuator motor. 2. Investigating drone autonomous ship landing technology. |
| Navigation system | 1. The accuracy, size, and power consumption of inertial guidance systems are not suitable for drones. 2. The unreliability of single guidance technology. | 1. Research on miniaturised and low-power inertial guidance technology for drones. 2. Investigate the performance of combining multiple navigation technologies. |
| Power system | 1. Fuel Engines: Retrofitting and automatic onboard starting of conventional engines in UAV applications | 1-1 Install an electric starter motor. 1-2 Installing an engine monitoring system. |
| 2. Hybrid Power: Coupling and integrated control technology of gasoline-electric power generation | 2-1 Integrate software and hardware. 2-2 Optimised Design Powertrain. | |
| 3. Propellers: Focus on the pitch and locking technology | 3-1 Develop locking mechanisms 3-2 Integrate with flight control systems | |
| 4. Electric Motors: Fault-tolerant motor control | 4-1 Use redundant components to improve fault tolerance. | |
| Communication system | 1. Achieving high-speed and low-latency data interaction between drones and other networks 2. Security concerns for UAV communications | 1. Research on technical solutions to improve data interaction. 2. Research on secure communication transmission and overcoming active jamming attacks. |
| Vision system | 1. Security concerns with vision sensors 2. Limitations of computing power for lightweight vision algorithms | 1. Study encryption techniques for drone communications. 2. Development of lightweight vision algorithms without sacrificing quality or speed. |
| Application | Challenges | Solutions |
|---|---|---|
| Marine rescue | 1. Difficulties in transferring injured individuals at sea during rescue operations. 2. Cloud and rain interfere with target recognition. | 1. Research on medical drones for transportation purposes. 2. Develop radar-forming equipment that can penetrate clouds and rain. |
| Marine safety and surveillance | 1. Data transfer capability for maritime surveillance during drone surveillance is limited by distance. 2. Developing data processing and data fusion techniques for maritime drone surveillance. 3. Practical cooperation between drones and existing maritime supervision equipment. | 1. Further research to improve the security and reliability of UAV data transmission. 2. Integrate vessel behaviour monitored by drones with vessel information obtained using the AIS. 3. Establish a 3D maritime supervision system with VTS as the centre of supervision. |
| Marine navigation | 1. Inefficient process for measuring hull structures. 2. Errors in using drones to inspect hull structural flaws. 3. A high probability of errors in the manual control of drones to inspect the cabin. | 1. Develop automated technologies for measuring hull structure thickness using drones. 2. Integrate multiple vision technologies such as automatic image recognition and measurement. 3. Utilise computer vision techniques to facilitate smooth and practical autonomous tracking flight of drones inside the cabin. |
| Marine environment | 1. Remote sensing data acquisition of a single UAV is no longer sufficient to meet the actual needs of coastal environmental monitoring. 2. The limited coverage area of a single drone. | 1. Combine multiple loads to acquire remote sensing data. 2. The self-organising network technology can be used to enable multiple drones to work together. |
| Marine communications | 1. Effectively deploying drones in the presence of interference. 2. All drones fly at the same fixed altitude when planning their trajectory. | 1. Find ways to eliminate interference between drones. 2. Investigate how drones can explore arbitrary routes in three dimensions. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Zhou, K.; Xing, W.; Li, H.; Yang, Z. Applications, Evolutions, and Challenges of Drones in Maritime Transport. J. Mar. Sci. Eng. 2023, 11, 2056. https://doi.org/10.3390/jmse11112056
Wang J, Zhou K, Xing W, Li H, Yang Z. Applications, Evolutions, and Challenges of Drones in Maritime Transport. Journal of Marine Science and Engineering. 2023; 11(11):2056. https://doi.org/10.3390/jmse11112056
Chicago/Turabian StyleWang, Jingbo, Kaiwen Zhou, Wenbin Xing, Huanhuan Li, and Zaili Yang. 2023. "Applications, Evolutions, and Challenges of Drones in Maritime Transport" Journal of Marine Science and Engineering 11, no. 11: 2056. https://doi.org/10.3390/jmse11112056
APA StyleWang, J., Zhou, K., Xing, W., Li, H., & Yang, Z. (2023). Applications, Evolutions, and Challenges of Drones in Maritime Transport. Journal of Marine Science and Engineering, 11(11), 2056. https://doi.org/10.3390/jmse11112056