
Forward-Looking Sonar-Based Stream Function Algorithm for Obstacle Avoidance in Autonomous Underwater Vehicles


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Obstacle Avoidance Path Based on Stream Function
3.1. Design of Stream Function for Path Planning
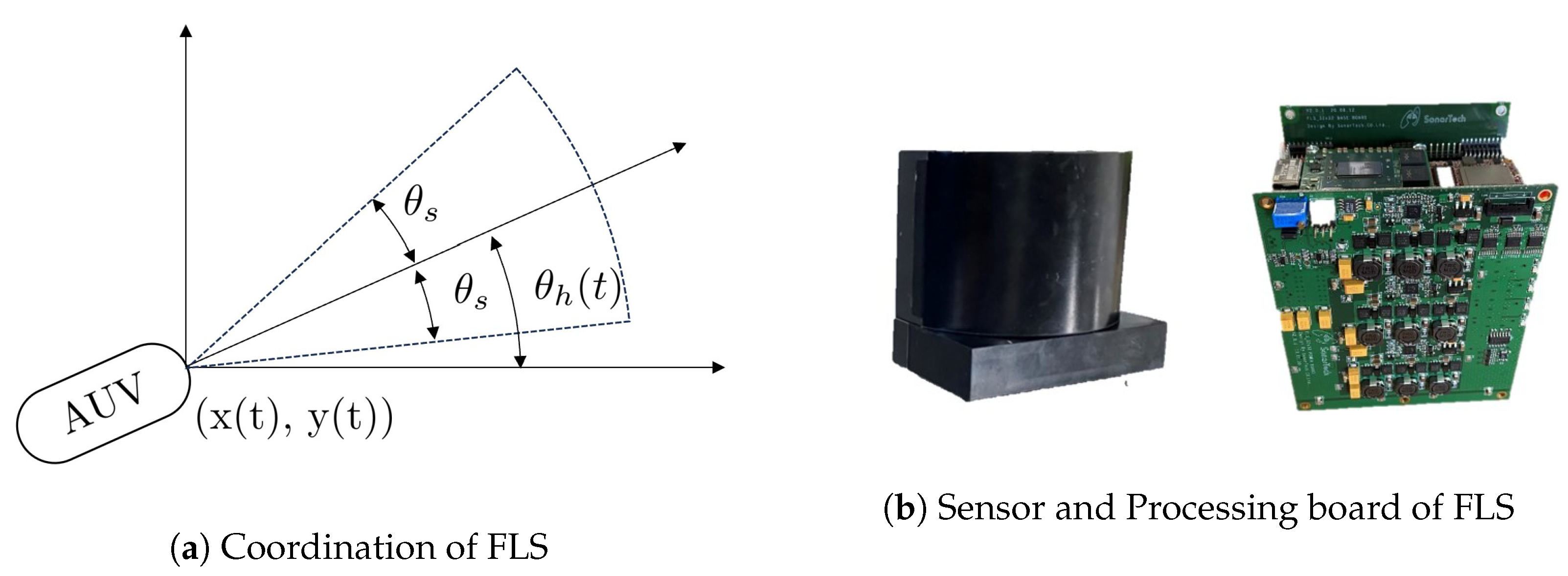
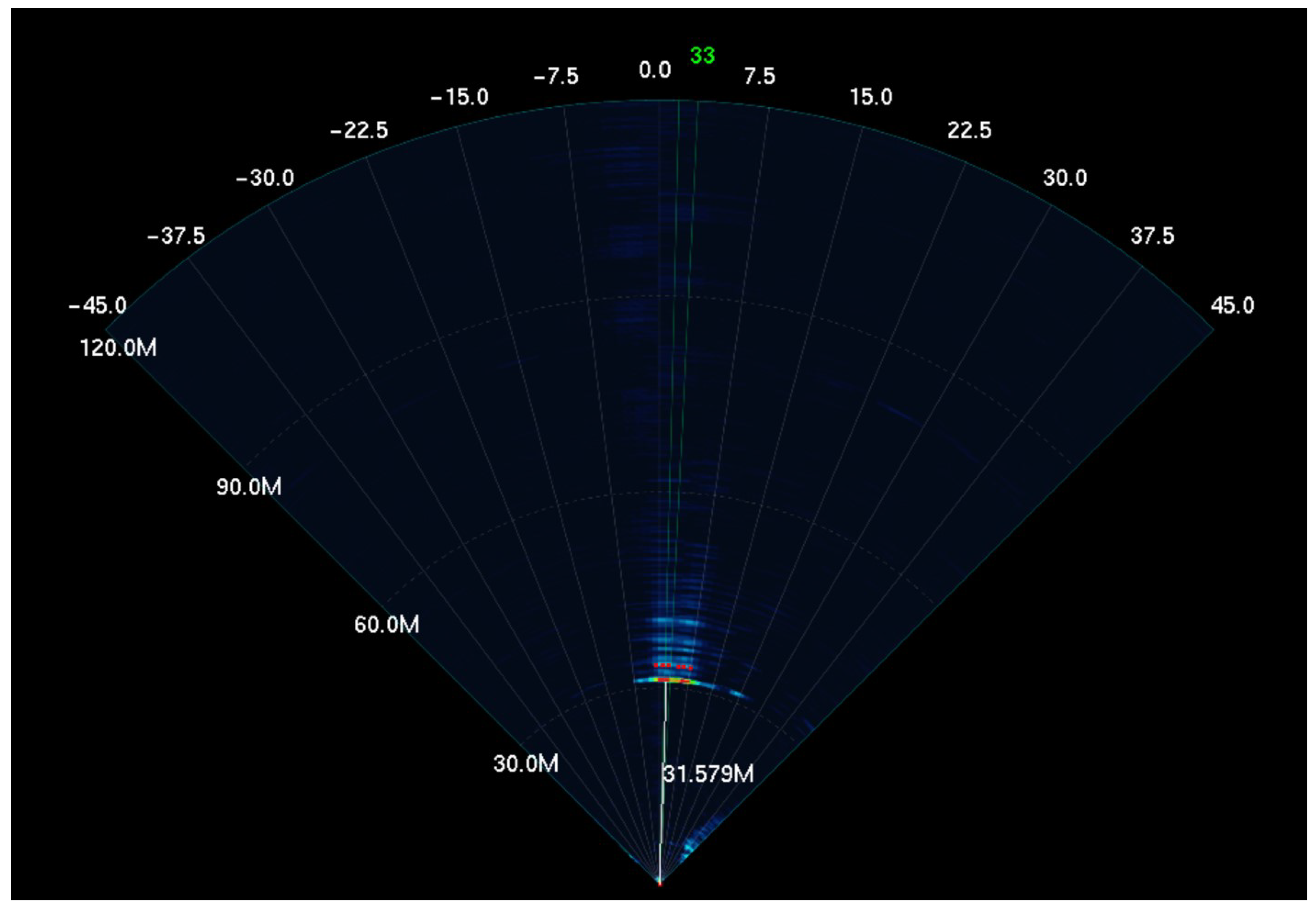
3.2. Characteristic of Forward Looking Sonar
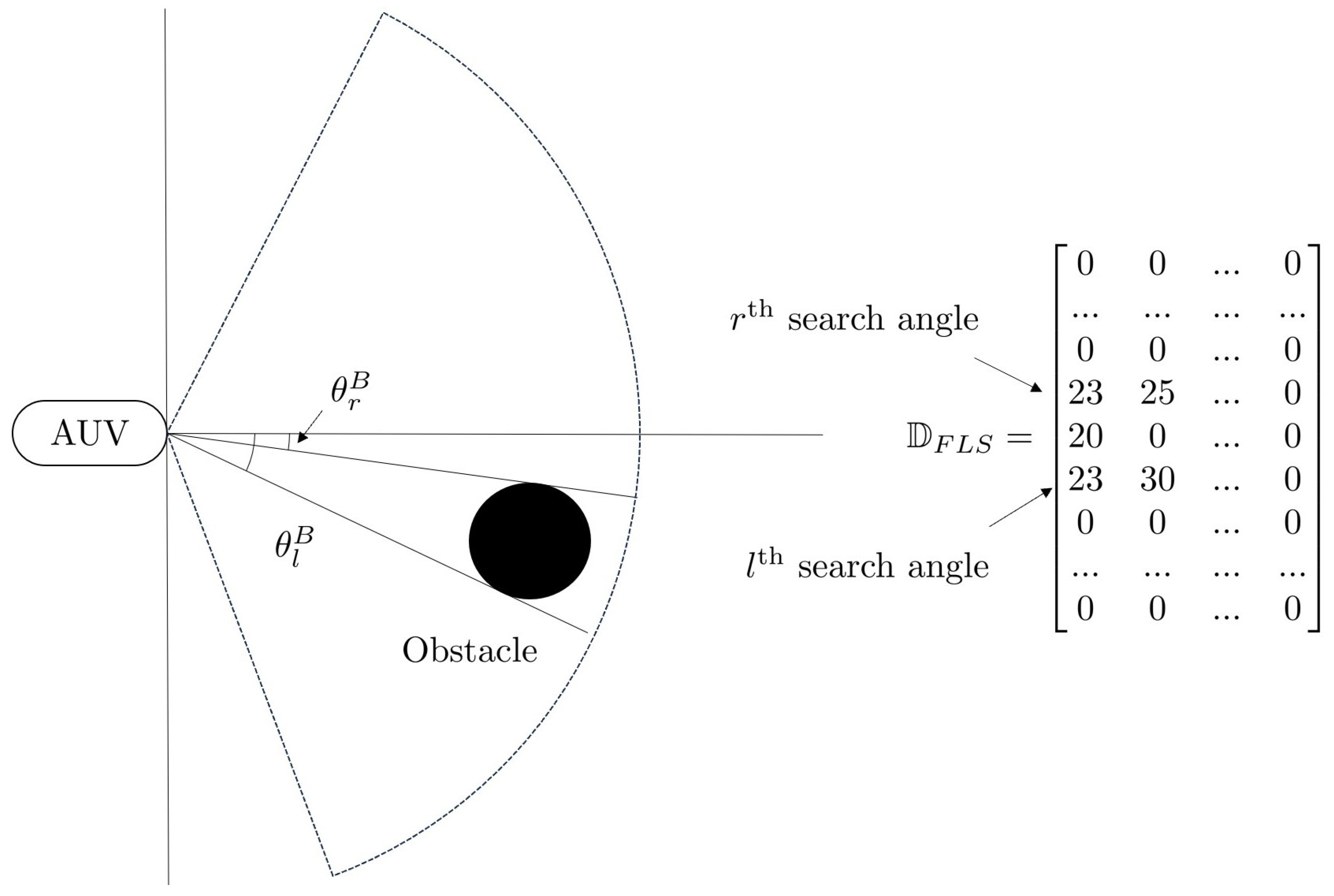
- Every obstacle within the search area is identified post-preprocessing.
- The discerned data include only the position and distance of the obstacles.
- Pre-processing procedures are sufficiently rapid to facilitate real-time operations.
3.3. Design of Avoidance Path Planning for Single Obstacle
3.4. Path Generation Considering the Motion of AUV
4. Simulation Results and Analysis
- Feasible operating range: 30 m.
- Horizontal beam width: .
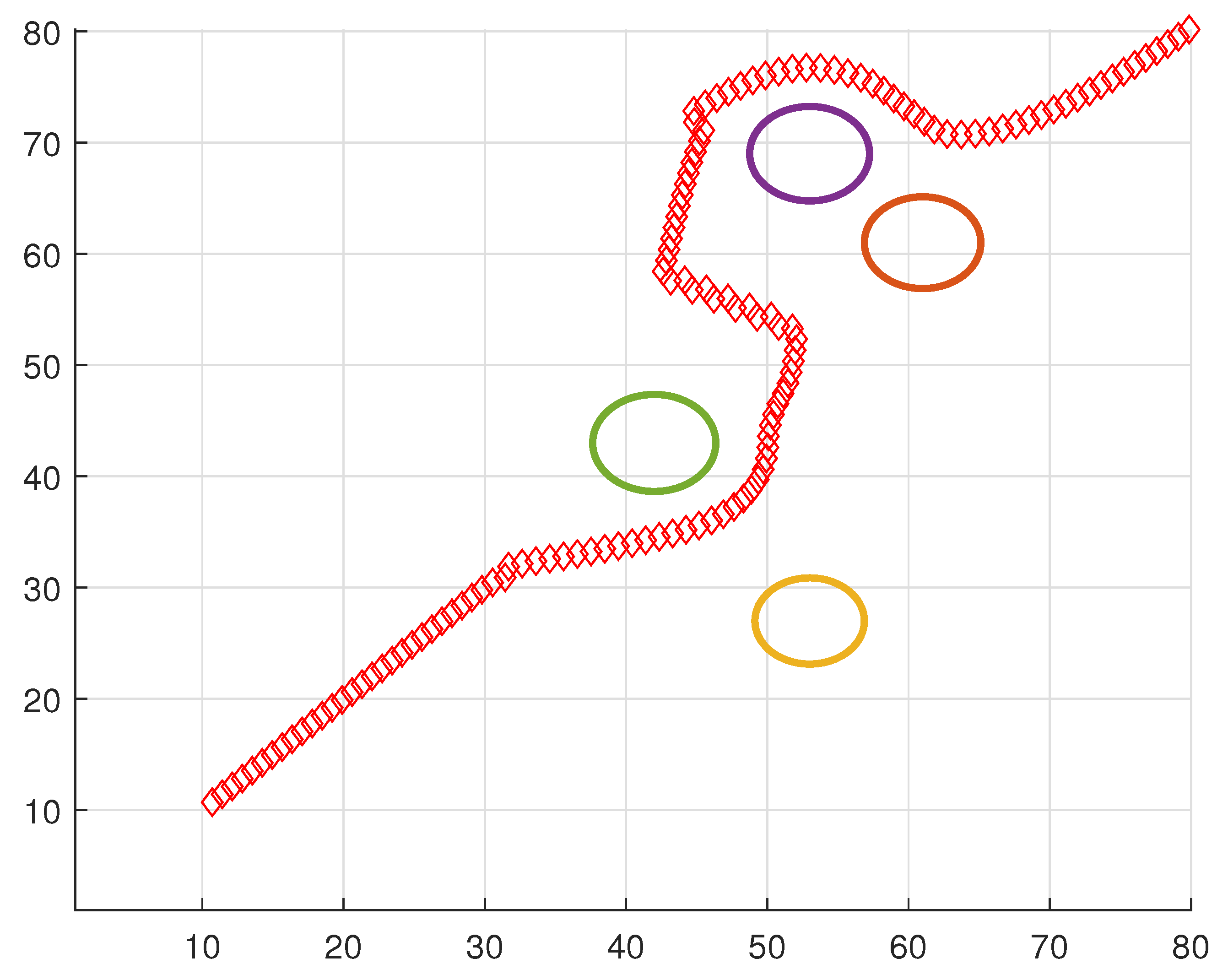
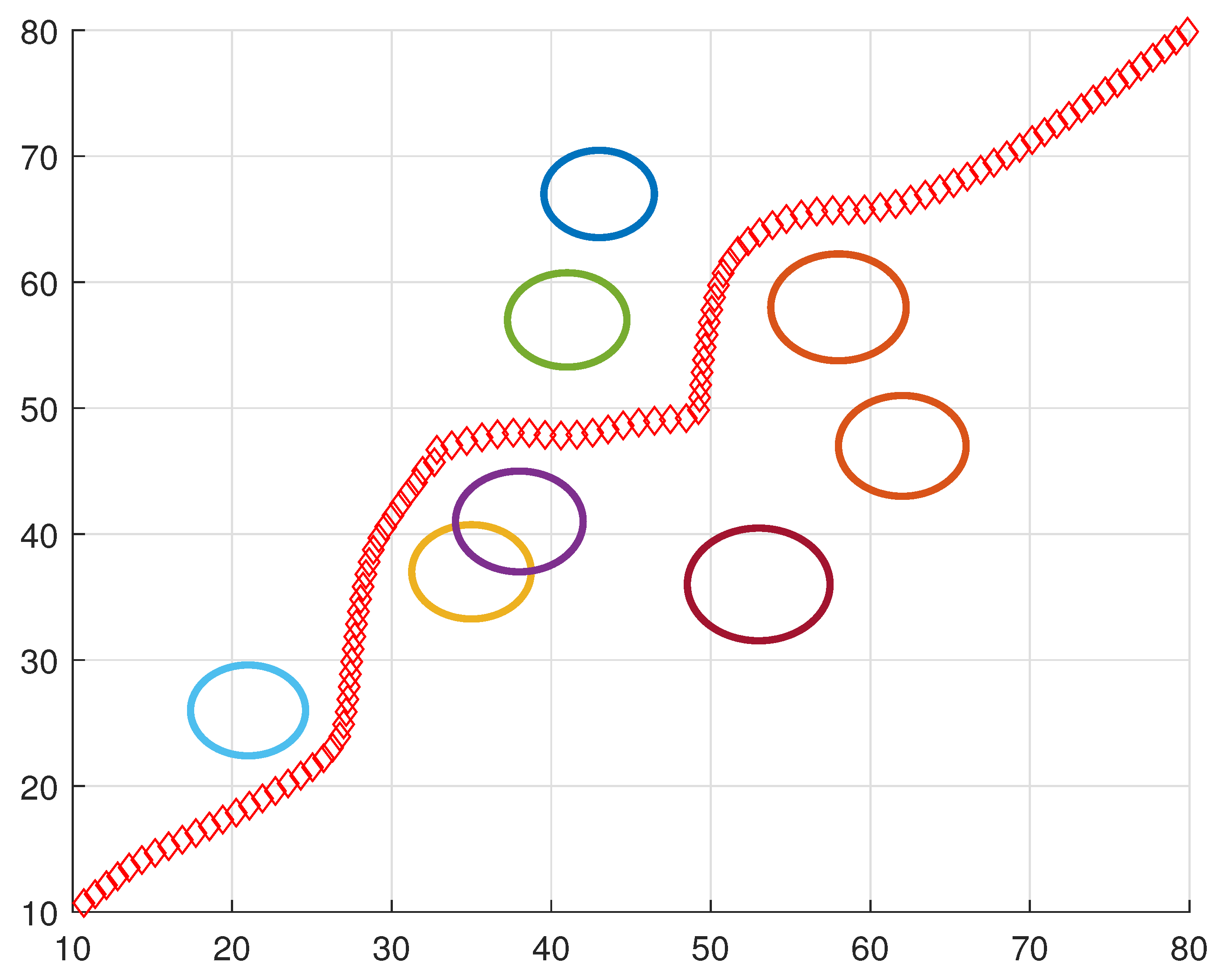
4.1. Obstacle Avoidance Standalone Simulation
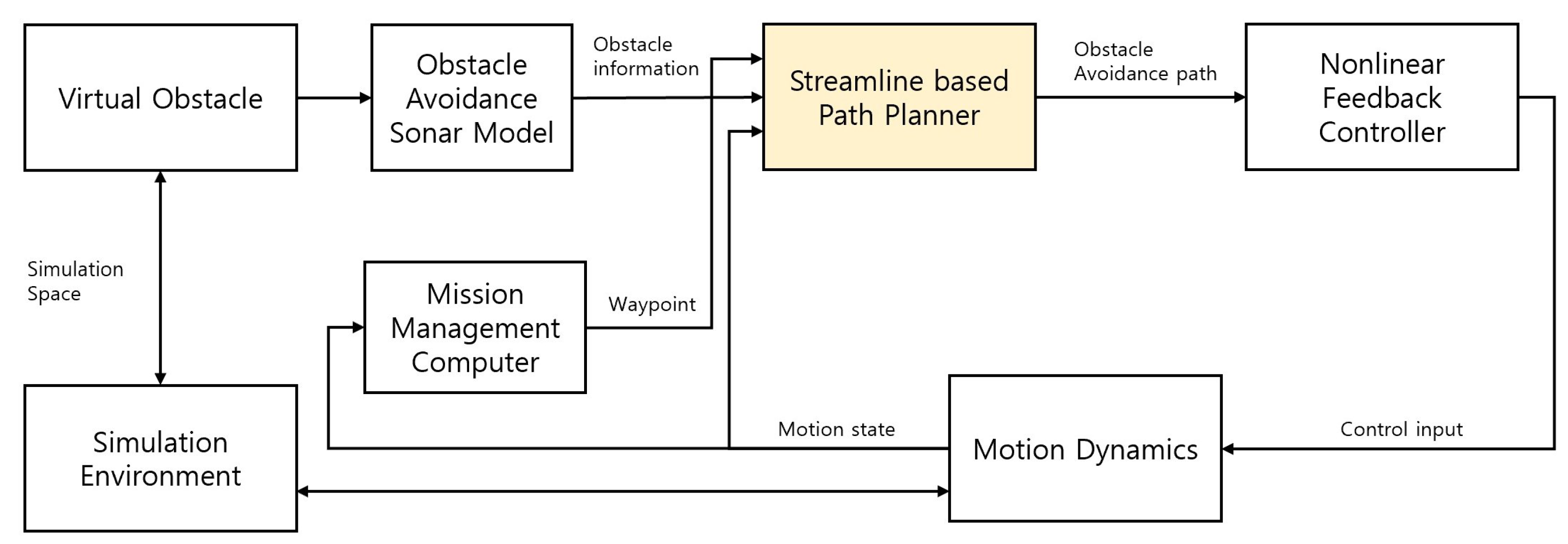
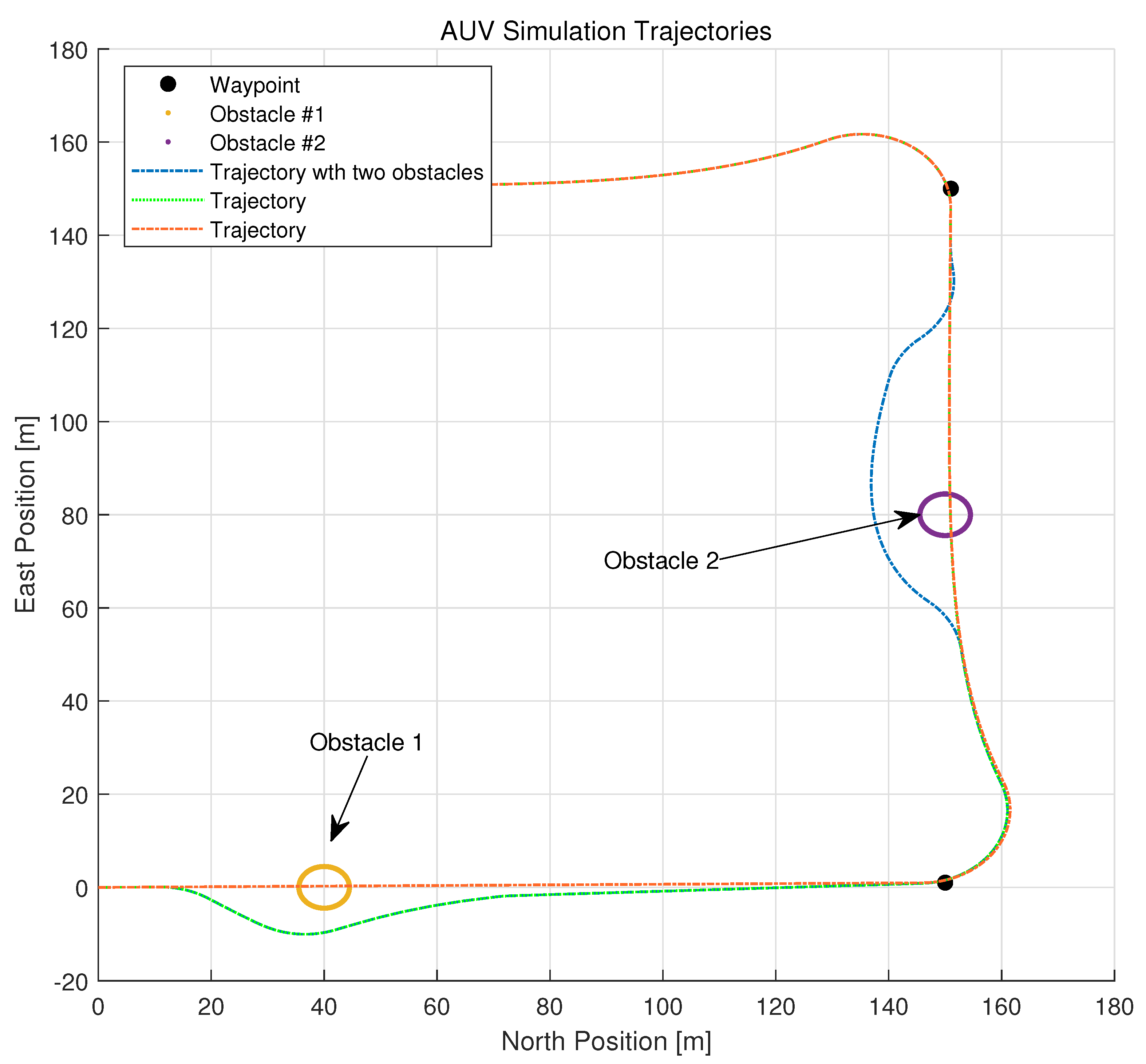
4.2. Integrated Obstacle Avoidance Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Derivation of the Stream Function
References
- Antonelli, G.; Chiaverini, S.; Finotello, R.; Schiavon, R. Real-time path planning and obstacle avoidance for RAIS: An autonomous underwater vehicle. IEEE J. Ocean. Eng. 2001, 26, 216–227. [Google Scholar] [CrossRef]
- Alvarez, A.; Caiti, A.; Onken, R. Evolutionary path planning for autonomous underwater vehicles in a variable ocean. IEEE J. Ocean. Eng. 2004, 29, 418–429. [Google Scholar] [CrossRef]
- Zhang, Q. A Hierarchical Global Path Planning Approach for AUV Based on Genetic Algorithm. In Proceedings of the 2006 International Conference on Mechatronics and Automation, Luoyang, China, 25–28 June 2006; pp. 1745–1750. [Google Scholar] [CrossRef]
- Brooks, R.A.; Lozano-Pérez, T. A subdivision algorithm in configuration space for findpath with rotation. IEEE Trans. Syst. Man Cybern. 1985, SMC-15, 224–233. [Google Scholar] [CrossRef]
- Noborio, H.; Naniwa, T.; Arimoto, S. A quadtree-based path-planning algorithm for a mobile robot. J. Robot. Syst. 1990, 7, 555–574. [Google Scholar] [CrossRef]
- Kitamura, Y.; Tanaka, T.; Kishino, F.; Yachida, M. 3-D path planning in a dynamic environment using an octree and an artificial potential field. In Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995; Volume 2, pp. 474–481. [Google Scholar] [CrossRef]
- Connolly, C.I.; Grupen, R.A. The applications of harmonic functions to robotics. J. Robot. Syst. 1993, 10, 931–946. [Google Scholar] [CrossRef]
- Kim, J.O.; Khosla, P. Real-time obstacle avoidance using harmonic potential functions. IEEE Trans. Robot. Autom. 1992, 8, 338–349. [Google Scholar] [CrossRef]
- Petres, C.; Pailhas, Y.; Patron, P.; Petillot, Y.; Evans, J.; Lane, D. Path Planning for Autonomous Underwater Vehicles. IEEE Trans. Robot. 2007, 23, 331–341. [Google Scholar] [CrossRef]
- Yongqiang, B.; Wenzhi, X.; Hao, F.; Jixiang, L.; Jing, C. Obstacle avoidance for multi-agent systems based on stream function and hierarchical associations. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 6363–6367. [Google Scholar]
- Wang, J.; Li, X.; Yan, J.; Luo, X. Formation Coverage Control for Mobile Directional Sensor Networks with Obstacle Avoidance via Stream Function. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 6410–6415. [Google Scholar] [CrossRef]
- To, K.Y.C.; Lee, K.M.B.; Yoo, C.; Anstee, S.; Fitch, R. Streamlines for Motion Planning in Underwater Currents. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 4619–4625. [Google Scholar] [CrossRef]
- Cai, W.; Xie, Q.; Zhang, M.; Lv, S.; Yang, J. Stream-Function Based 3D Obstacle Avoidance Mechanism for Mobile AUVs in the Internet of Underwater Things. IEEE Access 2021, 9, 142997–143012. [Google Scholar] [CrossRef]
- Yao, P.; Zhao, S. Three-Dimensional Path Planning for AUV Based on Interfered Fluid Dynamical System Under Ocean Current (June 2018). IEEE Access 2018, 6, 42904–42916. [Google Scholar] [CrossRef]
- Kazimierski, W.; Zaniewicz, G. Determination of Process Noise for Underwater Target Tracking with Forward Looking Sonar. Remote Sens. 2021, 13, 1014. [Google Scholar] [CrossRef]
- Milne-Thomson, L.M. Theoretical Hydrodynamics. In Dover Books on Physics; Dover Publications: Mineola, NY, USA, 2013. [Google Scholar]
- Waydo, S. Vehicle Motion Planning Using Stream Functions. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), Taipei, Taiwan, 14–19 September 2003. [Google Scholar]
- Axler, S.; Bourdon, P.; Ramey, W. Harmonic Function Theory; Springer: New York, NY, USA, 2001. [Google Scholar]
- Prestero, T. Verification of a Six-Degree of Freedom Simulation Model for the REMUS Autonomous Underwater Vehicle. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2001. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.H.; Yoo, T.; Park, S.J.; Oh, K. Forward-Looking Sonar-Based Stream Function Algorithm for Obstacle Avoidance in Autonomous Underwater Vehicles. J. Mar. Sci. Eng. 2023, 11, 1998. https://doi.org/10.3390/jmse11101998
Kim MH, Yoo T, Park SJ, Oh K. Forward-Looking Sonar-Based Stream Function Algorithm for Obstacle Avoidance in Autonomous Underwater Vehicles. Journal of Marine Science and Engineering. 2023; 11(10):1998. https://doi.org/10.3390/jmse11101998
Chicago/Turabian StyleKim, Moon Hwan, Teasuk Yoo, Seok Joon Park, and Kyungwon Oh. 2023. "Forward-Looking Sonar-Based Stream Function Algorithm for Obstacle Avoidance in Autonomous Underwater Vehicles" Journal of Marine Science and Engineering 11, no. 10: 1998. https://doi.org/10.3390/jmse11101998
APA StyleKim, M. H., Yoo, T., Park, S. J., & Oh, K. (2023). Forward-Looking Sonar-Based Stream Function Algorithm for Obstacle Avoidance in Autonomous Underwater Vehicles. Journal of Marine Science and Engineering, 11(10), 1998. https://doi.org/10.3390/jmse11101998