

Remote Operation of Marine Robotic Systems and Next-Generation Multi-Purpose Control Rooms



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methodology
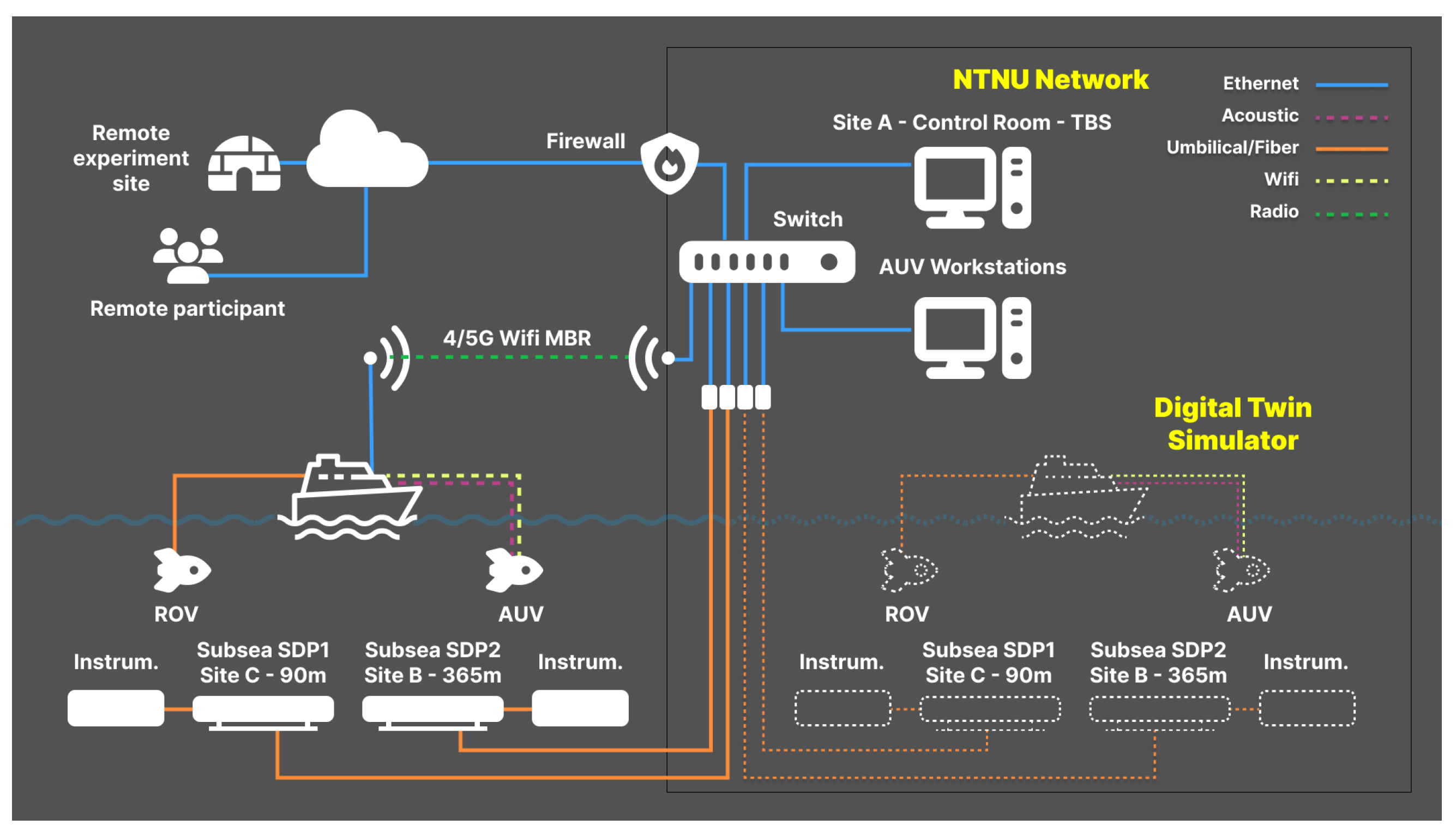
2.1. Multi-Purpose Control Room
2.2. Autonomous Support of AUVs Using an ASV
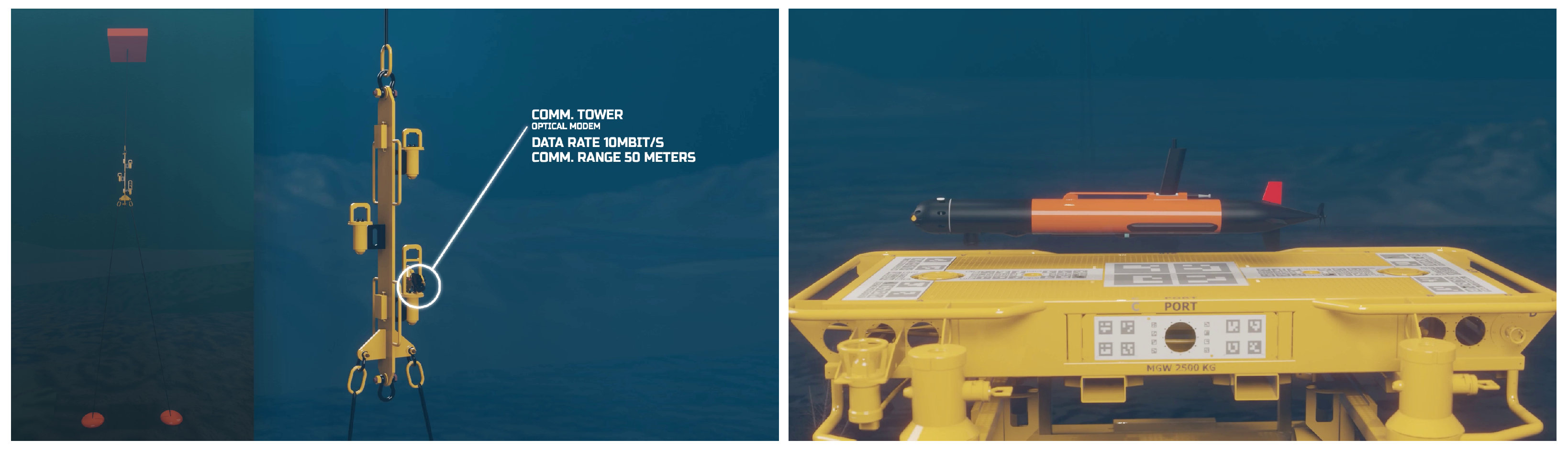
2.3. Subsea Residency: Interaction between an AUV and Benthic Infrastructure
2.4. Experiments with Active Remote Participants
2.5. Experimentation at the Remote Site
2.6. Virtual Experimentation
3. Experiments, Results, and Discussion
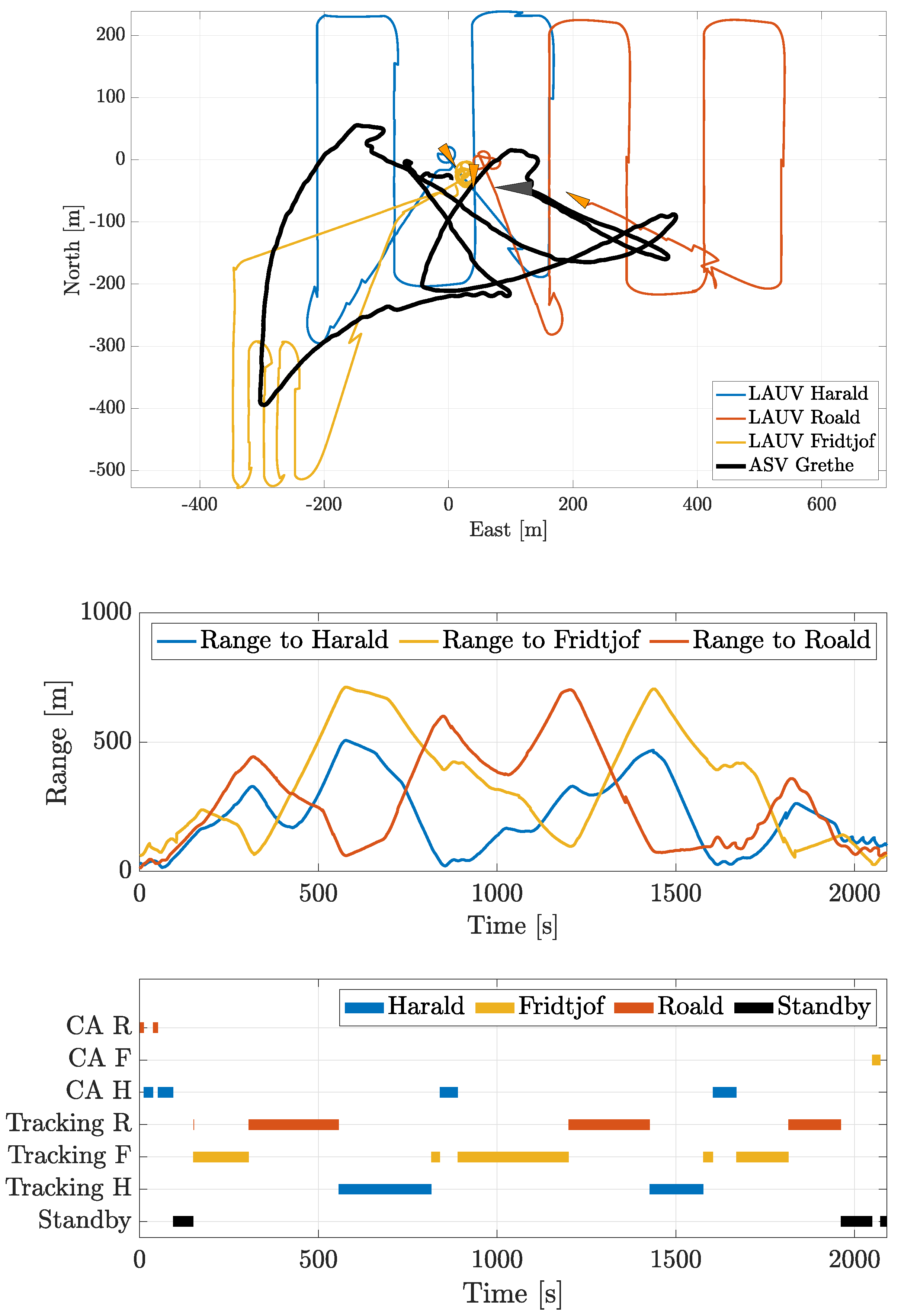
3.1. Multi-AUV Tracking with ASV
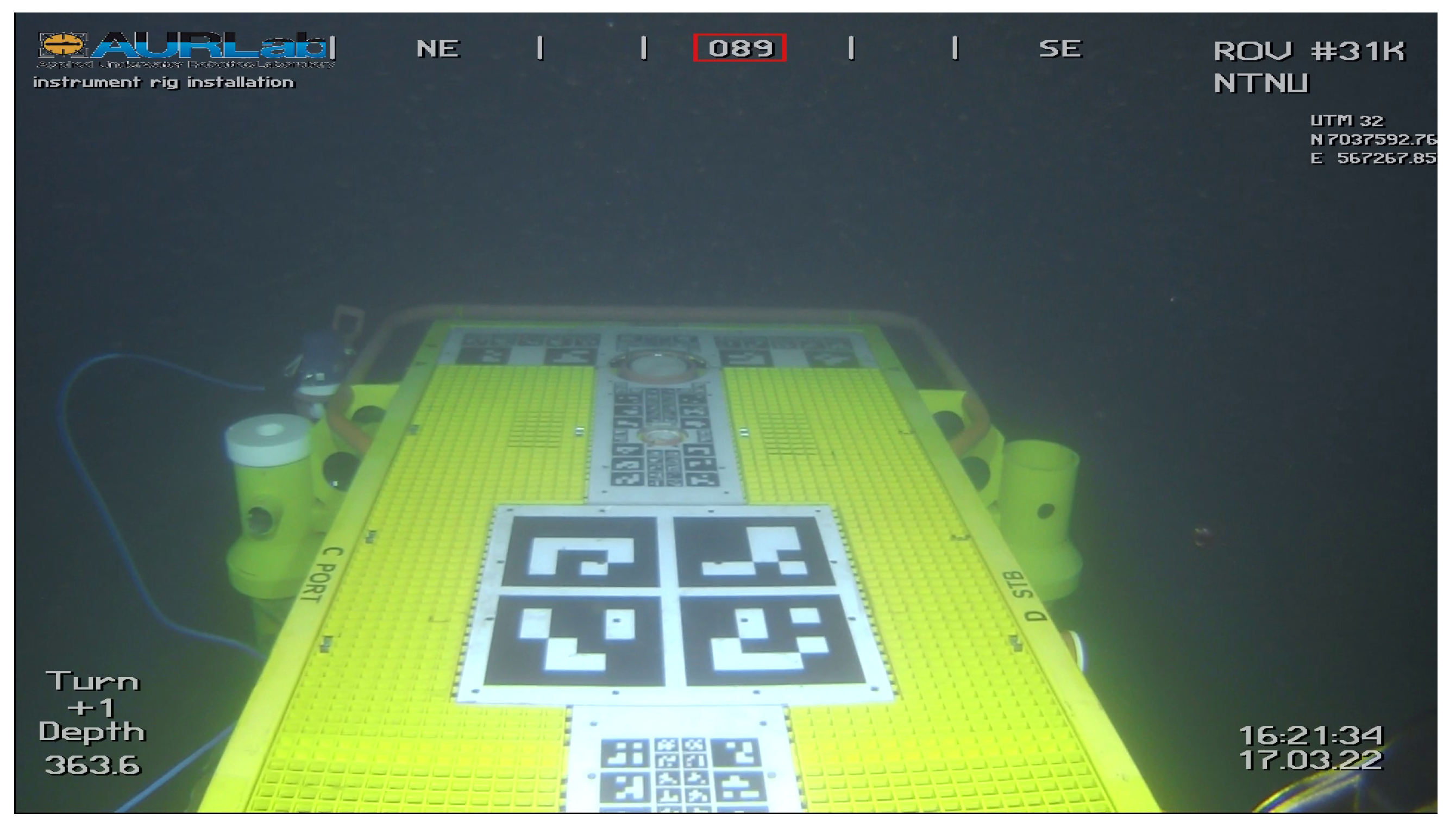
3.2. Subsea Residency—Docking and Navigation of AUVs around Man-Made Installations
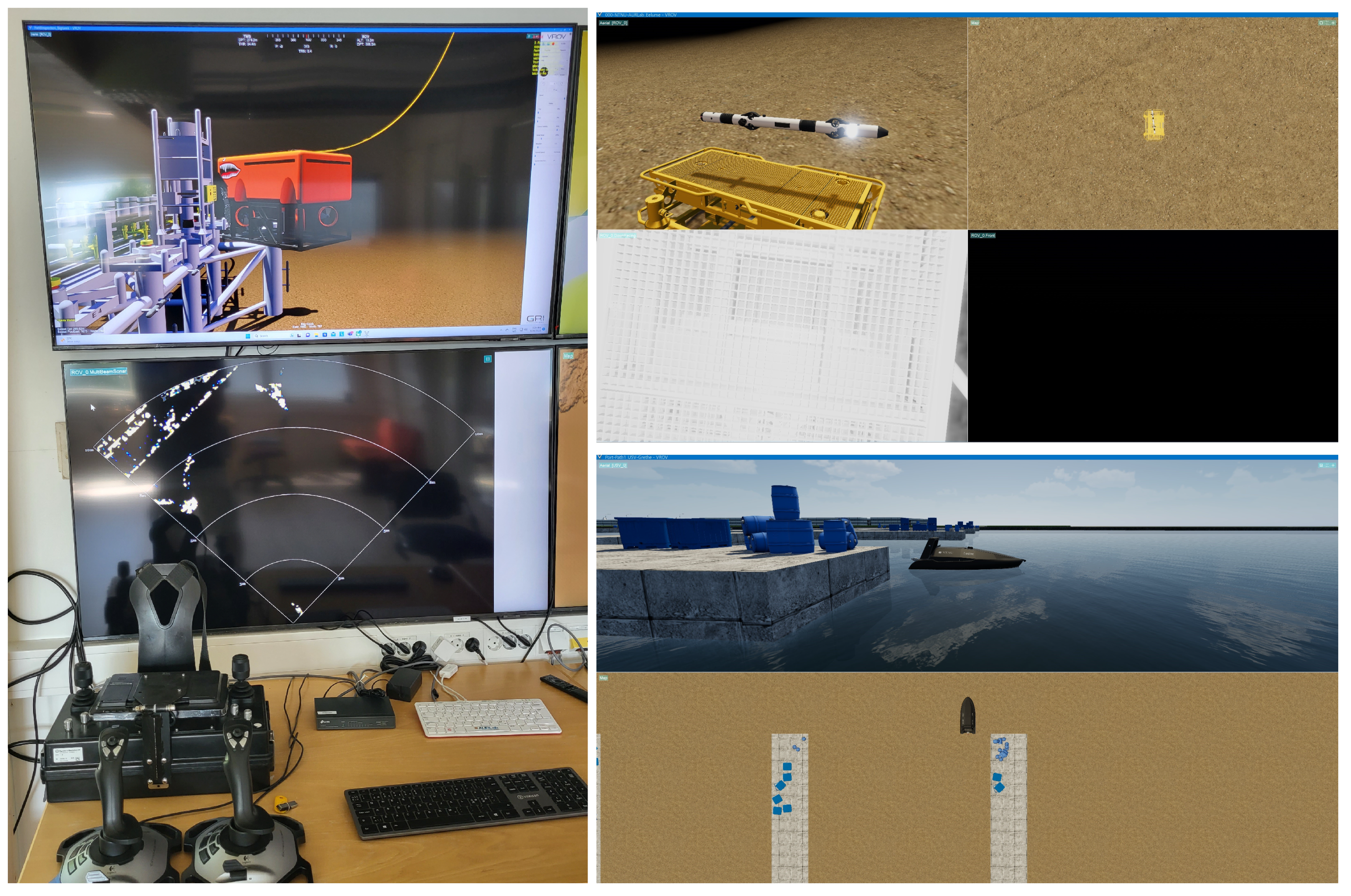
3.3. Operation of the Lab Vehicles from a Geographically Remote Place
3.4. Virtual Experimentation
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vasilijevic, A.; Barstein, K.; Bremnes, J.E. Infrastructure for remote experimentation in the Trondheim fjord. In Proceedings of the OCEANS 2023—, Limerick, Ireland, 5–8 June 2023; pp. 1–8. [Google Scholar]
- Newell, T.; Hema, G. An Autonomous Underwater Vehicle with Remote Piloting Using 4G Technology. In Proceedings of the Offshore Technology Conference Asia, Kuala Lumpur, Malaysia, 2–6 November 2020. [Google Scholar] [CrossRef]
- Ridao, P.; Carreras, M.; Hernandez, E.; Palomeras, N. Underwater Telerobotics for Collaborative Research. In Advances in Telerobotics; Ferre, M., Buss, M., Aracil, R., Melchiorri, C., Balaguer, C., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 347–359. [Google Scholar] [CrossRef]
- Silva, S.; Terrell, B.; Philip, M.; Rouge, N.; Angelidis, D.; Sosa, J.; Collins, R.; Rauf, Z. First Use of ROV Remote Operations from Shore in the Gulf of Mexico. In Proceedings of the OTC Offshore Technology Conference, Houston, TX, USA, 18 August 2021; p. D031S031R004. [Google Scholar] [CrossRef]
- Johnsen, G.; Solbjør, K.; Iversen, A.; Rouge, N.; Alsvik, H.F.; Anderson, G.; Craig, S. Isolation of North Sea Pipeline Successfully Carried Out By Resident ROV and Remote Operations from Shore. In Proceedings of the OTC Offshore Technology Conference, Houston, TX, USA, 1–4 May 2023; p. D021S019R007. [Google Scholar] [CrossRef]
- IKM-Subsea. Onshore Control Center. Available online: https://www.ikm.com/ikm-subsea/products/services/onshore-control-center (accessed on 1 September 2023).
- DeepOcean. Remote Operation Center (ROC). Available online: https://www.deepoceangroup.com/what-we-do/technology (accessed on 1 September 2023).
- Hurtado, A.; Offshore. Executive Insights: Remote Operations Are Evolving with ROV/AUV Advancements. Available online: https://www.offshore-mag.com/subsea/article/14293585/executive-insights-remote-operations-are-evolving-with-rovauv-advancements (accessed on 1 September 2023).
- L3Harris. ASView. Available online: https://www.l3harris.com/all-capabilities/asview-control-system (accessed on 1 September 2023).
- Nothwang, W.D.; McCourt, M.J.; Robinson, R.M.; Burden, S.A.; Curtis, J.W. The human should be part of the control loop? In Proceedings of the 2016 Resilience Week (RWS), Chicago, IL, USA, 16–18 August 2016; pp. 214–220. [Google Scholar]
- Ghosh, S.; Bequette, B.W. Process systems engineering and the human-in-the-loop: The smart control room. Ind. Eng. Chem. Res. 2019, 59, 2422–2429. [Google Scholar] [CrossRef]
- Ludvigsen, M.; Sørensen, A.J. Towards integrated autonomous underwater operations for ocean mapping and monitoring. Annu. Rev. Control 2016, 42, 145–157. [Google Scholar] [CrossRef]
- Agnisarman, S.; Lopes, S.; Madathil, K.C.; Piratla, K.; Gramopadhye, A. A survey of automation-enabled human-in-the-loop systems for infrastructure visual inspection. Autom. Constr. 2019, 97, 52–76. [Google Scholar] [CrossRef]
- Felski, A.; Zwolak, K. The ocean-going autonomous ship—Challenges and threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef]
- Vasilijević, A.; Nađ, Đ.; Mandić, F.; Mišković, N.; Vukić, Z. Coordinated navigation of surface and underwater marine robotic vehicles for ocean sampling and environmental monitoring. IEEE/ASME Trans. Mechatron. 2017, 22, 1174–1184. [Google Scholar] [CrossRef]
- Mai, C.; Pedersen, S.; Hansen, L.; Jepsen, K.L.; Yang, Z. Subsea infrastructure inspection: A review study. In Proceedings of the 2016 IEEE International Conference on Underwater System Technology: Theory and Applications (USYS), Penang, Malaysia, 13–14 December 2016; pp. 71–76. [Google Scholar]
- Manalang, D.; Delaney, J.; Marburg, A.; Nawaz, A. Resident auv workshop 2018: Applications and a path forward. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018; pp. 1–6. [Google Scholar]
- Transeth, A.A.; Schjølberg, I.; Lekkas, A.M.; Risholm, P.; Mohammed, A.; Skaldebø, M.; Haugaløkken, B.O.; Bjerkeng, M.; Tsiourva, M.; Py, F. Autonomous subsea intervention (SEAVENTION). In Proceedings of the 14th IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles CAMS 2022, Lyngby, Denmark, 14–16 September 2022; Volume 55, pp. 387–394. [Google Scholar] [CrossRef]
- Song, Z.; Marburg, A.; Manalang, D. Resident subsea robotic systems: A review. Mar. Technol. Soc. J. 2020, 54, 21–31. [Google Scholar] [CrossRef]
- Krauß, J.; Ackermann, T.; Kies, A.D.; Roth, D.; Mitterfellner, M. Virtual Experiments for a Sustainable Battery Cell Production. In Proceedings of the Manufacturing Driving Circular Economy; Kohl, H., Seliger, G., Dietrich, F., Eds.; Springer International Publishing: Cham, Switzerland, 2023; pp. 585–594. [Google Scholar]
- Alsaleh, S.; Tepljakov, A.; Köse, A.; Belikov, J.; Petlenkov, E. ReImagine Lab: Bridging the Gap between Hands-On, Virtual and Remote Control Engineering Laboratories Using Digital Twins and Extended Reality. IEEE Access 2022, 10, 89924–89943. [Google Scholar] [CrossRef]
- Scholz, G.; Fortmeier, I.; Marschall, M.; Stavridis, M.; Schulz, M.; Elster, C. Experimental Design for Virtual Experiments in Tilted-Wave Interferometry. Metrology 2022, 2, 84–97. [Google Scholar] [CrossRef]
- Grieves, M.; Vickers, J. Digital Twin: Mitigating Unpredictable, Undesirable Emergent Behavior in Complex Systems. In Transdisciplinary Perspectives on Complex Systems: New Findings and Approaches; Kahlen, F.J., Flumerfelt, S., Alves, A., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 85–113. [Google Scholar] [CrossRef]
- Singh, M.; Fuenmayor, E.; Hinchy, E.P.; Qiao, Y.; Murray, N.; Devine, D. Digital Twin: Origin to Future. Appl. Syst. Innov. 2021, 4, 36. [Google Scholar] [CrossRef]
- Qi, Q.; Tao, F.; Hu, T.; Anwer, N.; Liu, A.; Wei, Y.; Wang, L.; Nee, A. Enabling technologies and tools for digital twin. J. Manuf. Syst. 2021, 58, 3–21. [Google Scholar] [CrossRef]
- Rosendahl, T.; Vidar, H. Preface. In Integrated Operations in the Oil and Gas Industry: Sustainability and Capability Development; Rosendahl, T., Vidar, H., Eds.; IGI Global: Hershey, PA, USA, 2013. [Google Scholar] [CrossRef]
- Fossum, K.; Mohammad, A.B. Approaching Human-Robot Interaction with Resilience. In Proceedings of the Space Safety is No Accident; Sgobba, T., Rongier, I., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 295–302. [Google Scholar]
- ISO 11064; Ergonomic Design of Control Centres. International Organization for Standardization: Geneve, Switzerland, 2013.
- Dias, P.; Fraga, S.; Gomes, R.; Goncalves, G.; Pereira, F.; Pinto, J.; Sousa, J. Neptus—A framework to support multiple vehicle operation. In Proceedings of the Europe Oceans 2005, Brest, France, 20–23 June 2005; Volume 2, pp. 963–968. [Google Scholar] [CrossRef]
- EIVA. NaviSuite. Available online: https://www.eiva.com/about/eiva-log/ai-autonomy-automation-all-in-navisuite (accessed on 29 August 2023).
- Kongsberg. Maritime Broadband Radio-MBR. Available online: https://www.kongsberg.com/maritime/products/bridge-systems-and-control-centres/broadband-radios/maritime-broadband-radio/ (accessed on 29 August 2023).
- Bremnes, J.E.; Fyrvik, T.R.; Krogstad, T.R.; Sørensen, A.J. Design of a Switching Controller for Tracking AUVs with an ASV. IEEE Trans. Control Syst. Technol. 2023, 1–16, Submitted. [Google Scholar]
- Kalaitzakis, M.; Cain, B.; Carroll, S.; Ambrosi, A.; Whitehead, C.; Vitzilaios, N. Fiducial markers for pose estimation: Overview, applications and experimental comparison of the artag, apriltag, aruco and stag markers. J. Intell. Robot. Syst. 2021, 101, 71. [Google Scholar] [CrossRef]
- Lambertini, A.; Menghini, M.; Cimini, J.; Odetti, A.; Bruzzone, G.; Bibuli, M.; Mandanici, E.; Vittuari, L.; Castaldi, P.; Caccia, M.; et al. Underwater Drone Architecture for Marine Digital Twin: Lessons Learned from SUSHI DROP Project. Sensors 2022, 22, 744. [Google Scholar] [CrossRef] [PubMed]
- Pinto, J.; Calado, P.; Braga, J.; Dias, P.; Martins, R.; Marques, E.; Sousa, J. Implementation of a Control Architecture for Networked Vehicle Systems. IFAC Proc. Vol. 2012, 45, 100–105. [Google Scholar] [CrossRef]
- Martins, R.; Dias, P.S.; Marques, E.R.B.; Pinto, J.; Sousa, J.B.; Pereira, F.L. IMC: A communication protocol for networked vehicles and sensors. In Proceedings of the IEEE/MTS OCEANS, Bremen, Germany, 11–14 May 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Harris, C.A.; Phillips, A.B.; Dopico-Gonzalez, C.; Brito, M.P. Risk and reliability modelling for multi-vehicle marine domains. In Proceedings of the 2016 IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, Japan, 6–9 November 2016; pp. 286–293. [Google Scholar] [CrossRef]
- Yang, R.; Bremnes, J.E.; Utne, I. A system-theoretic approach to hazard identification of operation with multiple autonomous marine systems (AMS). In Proceedings of the 32nd European Safety and Reliability Conference (ESREL 2022), Dublin, Ireland, 28 August–1 September 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Rannestad, T.L. Visual Close-range Navigation and Docking of Underwater Vehicles Using ArUco Markers. Master’s Thesis, Norwegian University of Science and Technology, Trondheim, Norway, 2022. [Google Scholar]
- Abicht, D.; Torvestad, J.C.; Solheimsnes, P.A.; Stenevik, K.A. Underwater intervention drone subsea control system. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 4–7 May 2020; p. D011S011R006. [Google Scholar]
- Bogue, R. Robots in the offshore oil and gas industries: A review of recent developments. Ind. Robot. Int. J. Robot. Res. Appl. 2020, 47, 1–6. [Google Scholar] [CrossRef]
- Norce. MarTERA Undina. Available online: https://www.norceresearch.no/en/projects/martera-undina-underwater-robotics-with-multi-modal-communication-and-network-aided-positioning-system (accessed on 4 September 2023).
- Lilja Bye, B.; Sylaios, G.; Berre, A.J.; Van Dam, S.; Kiousi, V. Digital Twin of the Ocean—An Introduction to the ILIAD project. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 23–27 May 2022; p. EGU22–12617. [Google Scholar] [CrossRef]
- Davies, E.; Brandvik, P.; Leirvik, F.; Nepstad, R. The use of wide-band transmittance imaging to size and classify suspended particulate matter in seawater. Mar. Pollut. Bull. 2017, 115, 105–114. [Google Scholar] [CrossRef] [PubMed]
- SINTEF. SilCam. Available online: https://www.sintef.no/sintef-ocean/satsinger/silcam/ (accessed on 29 August 2023).
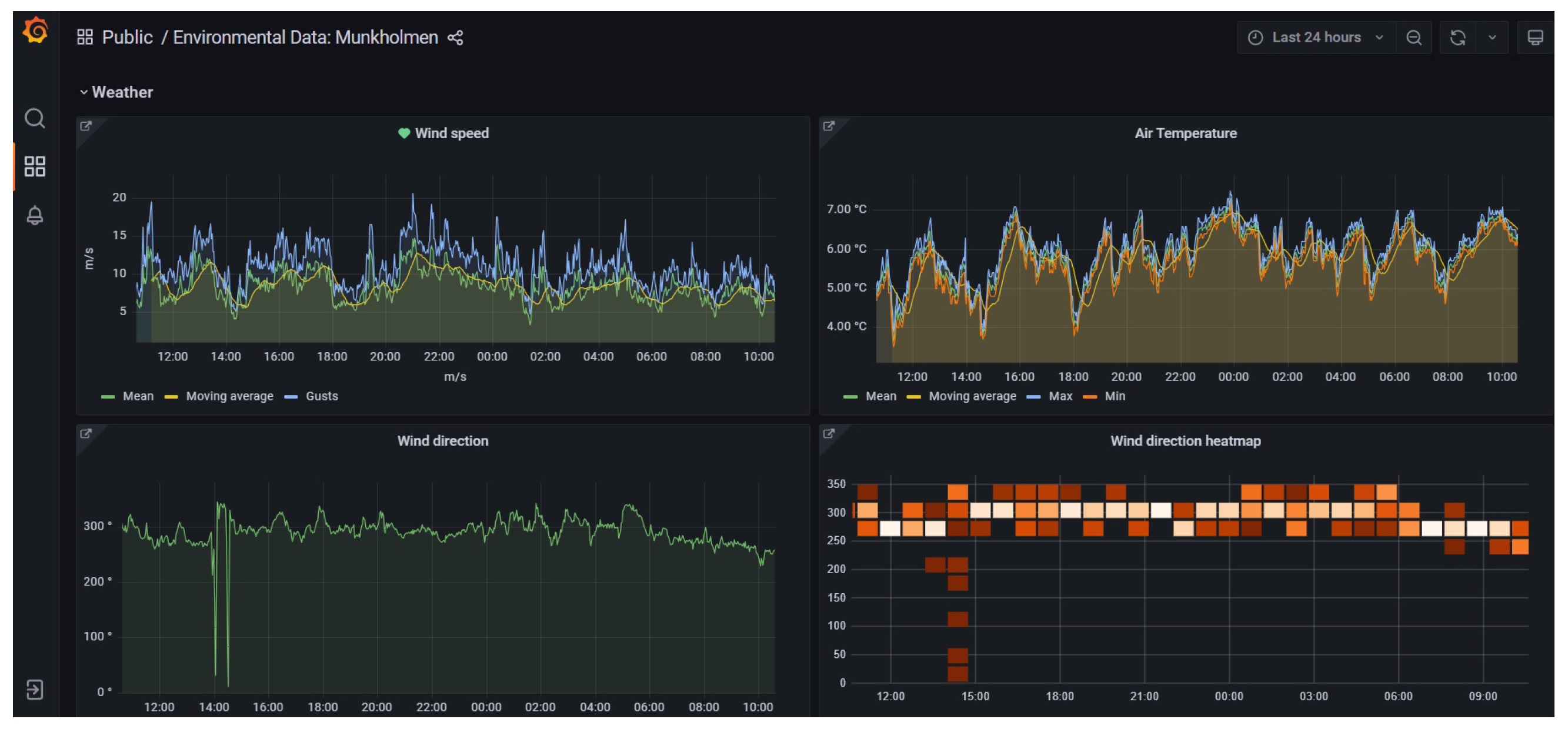
- SINTEF&NTNU. OceanLab Observatory. Available online: https://www.oceanlabobservatory.no/ (accessed on 29 August 2023).
- GRi simulations. Available online: https://grisim.com/new-features/ (accessed on 29 August 2023).
- Veitch, E.; Alsos, O.A.; Cheng, T.; Senderud, K.; Utne, I.B. Human Factor Influences on Supervisory Control of Remotely Operated and Autonomous Vessels. In SSRN Social Science Research Network; Elsevier: Rochester, NY, USA, 2023; p. 4437731. [Google Scholar] [CrossRef]
- Veitch, E.A.; Kaland, T.; Alsos, O.A. Design for Resilient Human-System Interaction in Autonomy: The Case of a Shore Control Centre for Unmanned Ships. Proc. Des. Soc. 2021, 1, 1023–1032. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vasilijevic, A.; Bremnes, J.E.; Ludvigsen, M. Remote Operation of Marine Robotic Systems and Next-Generation Multi-Purpose Control Rooms. J. Mar. Sci. Eng. 2023, 11, 1942. https://doi.org/10.3390/jmse11101942
Vasilijevic A, Bremnes JE, Ludvigsen M. Remote Operation of Marine Robotic Systems and Next-Generation Multi-Purpose Control Rooms. Journal of Marine Science and Engineering. 2023; 11(10):1942. https://doi.org/10.3390/jmse11101942
Chicago/Turabian StyleVasilijevic, Antonio, Jens Einar Bremnes, and Martin Ludvigsen. 2023. "Remote Operation of Marine Robotic Systems and Next-Generation Multi-Purpose Control Rooms" Journal of Marine Science and Engineering 11, no. 10: 1942. https://doi.org/10.3390/jmse11101942
APA StyleVasilijevic, A., Bremnes, J. E., & Ludvigsen, M. (2023). Remote Operation of Marine Robotic Systems and Next-Generation Multi-Purpose Control Rooms. Journal of Marine Science and Engineering, 11(10), 1942. https://doi.org/10.3390/jmse11101942