


Power Prediction of a 15,000 TEU Containership: Deep-Learning Algorithm Compared to a Physical Model

 ,
,  ,
,  ,
,  ,
,
Abstract
:1. Introduction
1.1. The Importance of Power Determination
1.2. Methods to Determine a Ship’s Required Power
2. Materials and Methods
- Boiler consumed (MT);
- DG consumed (MT);
- ME consumed (MT);
- DG electric power (kW);
- Shaft power (kW);
- Shaft rpm (rpm);
- Draft foreword (m);
- Draft aft (m);
- Relative/apparent wind speed (m/s);
- Relative wind direction (deg);
- COG heading (deg);
- GPS speed (knots);
- Log speed (knots);
- Shaft generator power (kW);
- Under-keel clearance (m);
- Shaft generator power (kW);
- DG1 power (kW);
- DG2 power (kW);
- DG3 power (kW);
- DG4 power (kW);
- Shaft torque (kNm);
- WHR—turbo-generated electric power (kW);
- ME power (KW).
2.1. The White-Box Model
2.1.1. Resistance in Calm Water and in Waves
- -
- Frictional resistance;
- -
- Appendage resistance;
- -
- Wave resistance;
- -
- Resistance due to bulbous bow near the water surface;
- -
- Pressure resistance due to immersed transom;
- -
- Model–ship correlation resistance;
- -
- Air resistance.
- B is the breadth of the ship;
- ρ is the water density;
- is the wave amplitude;
- is the ship’s length between perpendiculars;
- is the Froude number;
- is the wave length;
- is the block coefficient;
- is the circular wave frequency;
- is the resonance frequency dependent on the Froude number;
- and are the factors defined in [18];
- is the peak-added-resistance factor;
- is the forward-speed factor.
2.1.2. Added Resistance Due to Winds
- is the air density;
- is the apparent wind velocity;
- is the ship’s projected lateral area;
- is the cross-force parameter;
- is the non-dimensional longitudinal drag coefficient;
- is the non-dimensional transverse drag coefficient;
- is the apparent wind angle.
2.1.3. Efficiency Factors
- The relative rotational efficiency () was determined according to the formulation of Holtrop and Mennen for a single-screw ship:
- The open-water propeller efficiency () was calculated as follows:
- The hull efficiency () was determined as follows:
2.2. The Black-Box-Model DNN
- and are the exponential decay rates;
- is the exponential moving average of the gradient;
- is the exponential moving average of the squared gradient;
- is the network parameter to be updated;
- is the gradient;
- is the correction bias for ;
- is the correction bias for ;
- is the learning rate;
- is a smoothing term that avoids division by zero.
3. Results and Discussion
4. Sensitivity Analysis
5. Conclusions
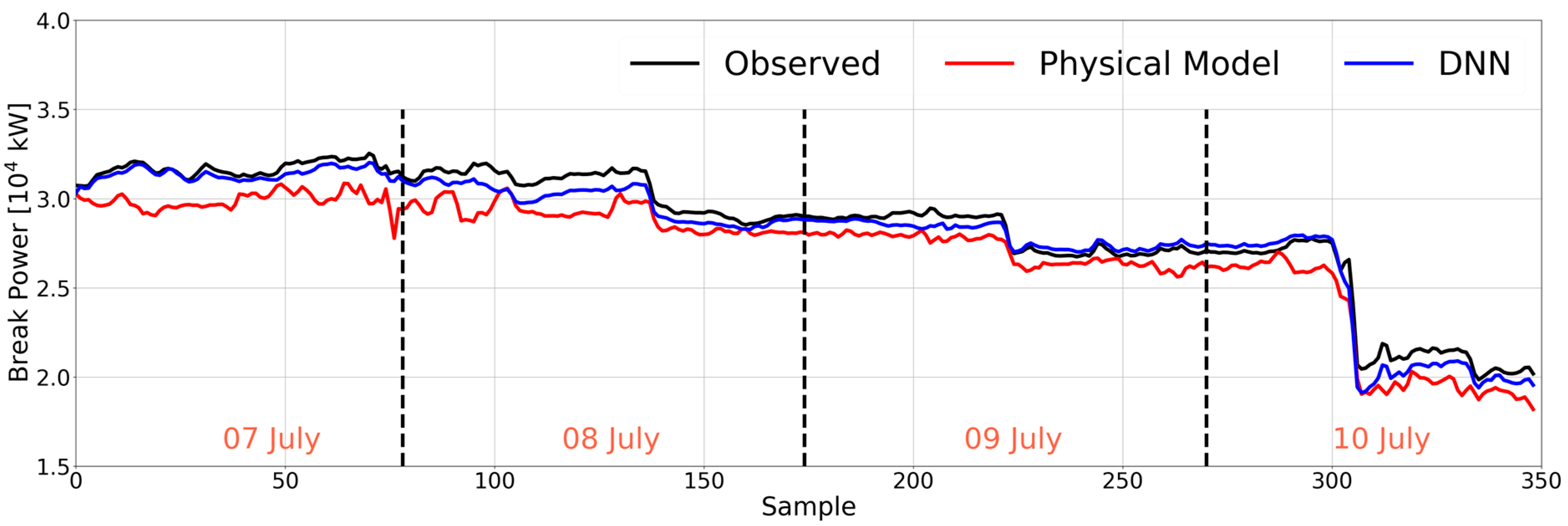
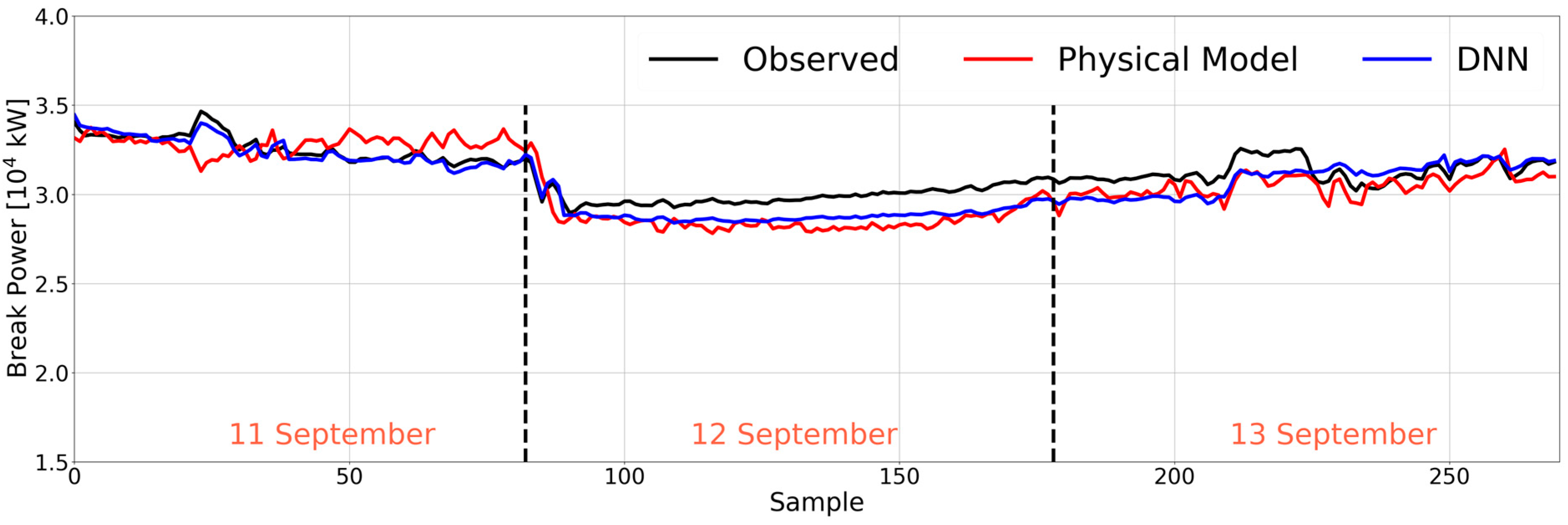
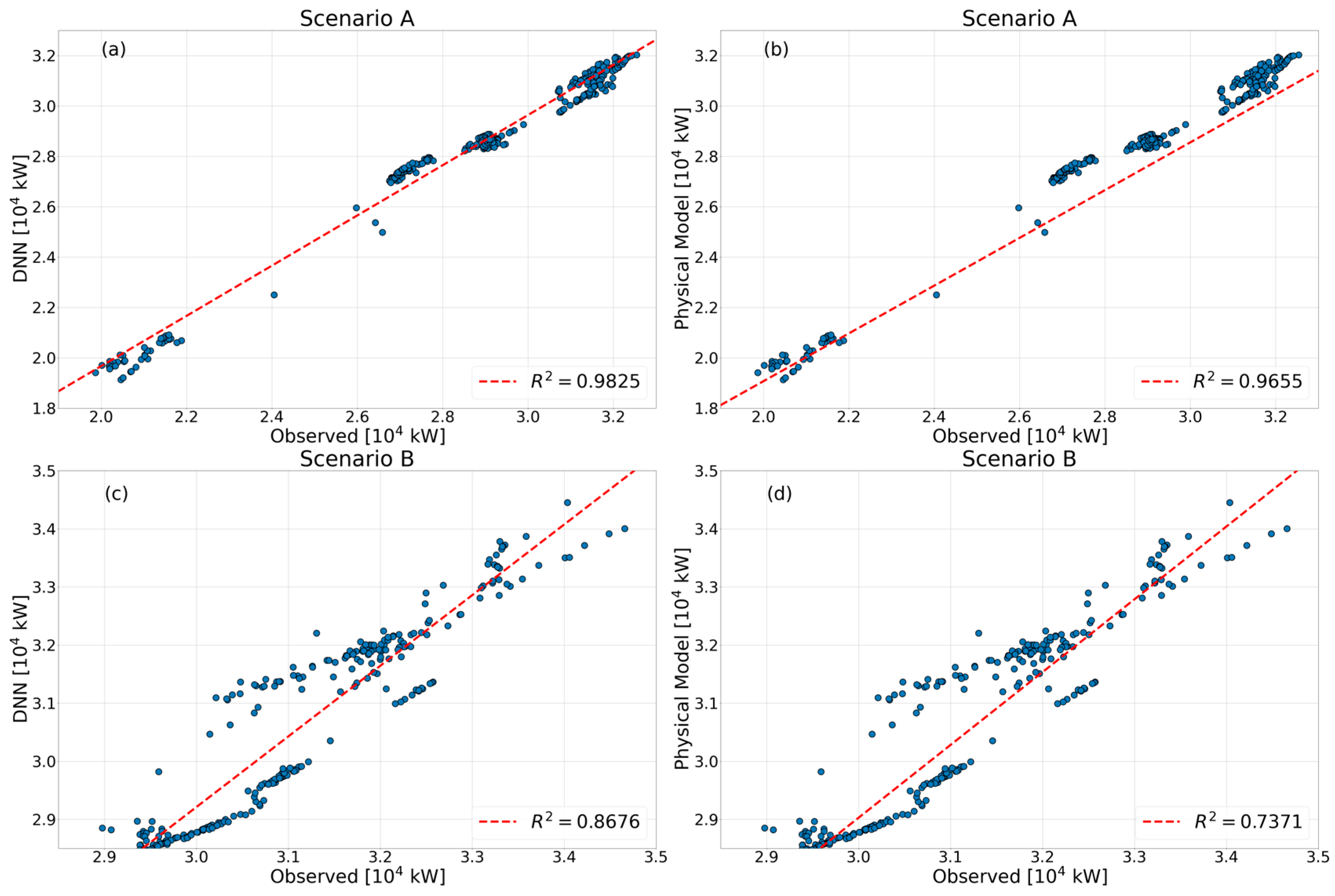
- Generally, our brake power predictions from the DNN compared more favorably to the observed (measured) predictions than those obtained from the enhanced SNAM. The RMSE, the MAE, as well as the R-square approaches obtained more accurate predictions than the physical model;
- More frequent fluctuations characterized the enhanced SNAM predictions, despite the more accurate formulations of, for example, the added resistance in waves and wind resistance. The RMSE and MAE approaches yielded lower values for the two scenarios presented. By and large, several parameters were defined in advance for the physical method proposed in our white-box model. This meant that the values inside the physical approach could not be adjusted during the scenarios, which led to underpredictions in some cases;
- Our results demonstrated the practical feasibility of this machine-learning DNN approach, considering the increased number of input features compared to the previous data-driven approach of ours, lowering the RMSE values as well.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Placek, M.; «Ocean Shipping Worldwide—Statistics & Facts» Statista. 20 June 2022. Available online: https://www.statista.com/topics/1728/ocean-shipping/#topicOverview (accessed on 25 May 2023).
- IMO. 4th Greenhouse Gas (GHG) Report. 2020. Available online: https://www.imo.org/en/ourwork/Environment/Pages/Fourth-IMO-Greenhouse-Gas-Study-2020.aspx (accessed on 20 July 2023).
- IMO. Marine Environment Protection Committee (MEPC 80), 3–7 July 2023. Available online: https://www.imo.org/en/MediaCentre/MeetingSummaries/Pages/MEPC-80.aspx#:~:text=7%20July%202023-,Marine%20Environ-ment%20Protection%20Committee%20(MEPC,)%2C%203%2D7%20July%202023&text=The%20MEPC%2080%20session%20adopted,targets%20to%20tackle%20harmful%20emissions (accessed on 23 July 2023).
- IMO. RESOLUTION MEPC.353(78). 2022. Available online: https://wwwcdn.imo.org/localresources/en/OurWork/Environment/Documents/Air%20pollution/MEPC.353(78).pdf (accessed on 28 March 2023).
- Gupta, P.; Taskar, B.; Steen, S.; Rasheed, A. Statistical modeling of Ship’s hydrodynamic performance indicator. Appl. Ocean. Res. 2021, 111, 102623. [Google Scholar] [CrossRef]
- Holtrop, J.; Mennen, G. An approximate power prediction method. Int. Shipbuild. Prog. 1982, 29, 166–170. [Google Scholar] [CrossRef]
- Guldhammer, H.E.; Harvald, S.A. Ship Resistance—Effect of Form and Principal Dimensions; Danish Technial Press: Copenhagen, Denmark, 1974. [Google Scholar]
- Hollenbach, K. Estimating resistance and propulsion for single-screw and twin-screw ships. Ship Technol. Res. 1998, 45, 72–76. [Google Scholar]
- Molland, A.; Turnock, S.R.; Hudson, D.A. Ship Resistance and Propulsion: Practical Estimation of Ship Propulsion Power, 2nd ed.; University of Southampton: Southampton, UK; Cambridge University Press: Cambridge, UK, 2017. [Google Scholar]
- Fan, A.; Yang, J.; Yang, L.; Wu, D.; Vladimir, N. A review of ship fuel consumption models. Ocean. Eng. 2022, 264, 112405. [Google Scholar] [CrossRef]
- Lee, J.-B.; Roh, M.-I.; Kim, K.-S. Prediction of ship power based on variation in deep feed-forward neural network. Int. J. Nav. Archit. Ocean. Eng. 2021, 13, 641–649. [Google Scholar] [CrossRef]
- IACS Guidelines on Numerical Calculations for the Purpose of Deriving the Vref in the Framework of the EEXI Regulation. No.173, 10 November 2022. Available online: https://iacs.org.uk/ (accessed on 16 June 2023).
- Lang, X.; Wu, D.; Mao, W. Comparison of supervised machine learning methods to predict ship propulsion power at sea. Ocean. Eng. 2022, 245, 110387. [Google Scholar] [CrossRef]
- Zhou, L.; Sun, Q.; Ding, S.; Han, S.; Wang, A. A Machine-Learning-Based Method for Ship Propulsion Power Prediction in Ice. J. Mar. Sci. Eng. 2023, 11, 1381. [Google Scholar] [CrossRef]
- La Ferlita, A.; Qi, Y.; Di Nardo, E.; el Moctar, O.; Schellin, T.E.; Ciaramella, A. A Comparative Study to Estimate Fuel Consumption: A Simplified Physical Approach against a Data-Driven Model. J. Mar. Sci. Eng. 2023, 11, 850. [Google Scholar] [CrossRef]
- Elkafas, A.G.; Elgohary, M.M.; Zeid, A.E. Numerical study on the hydrodynamic drag force of a container ship model. Alex. Eng. J. 2019, 58, 849–859. [Google Scholar] [CrossRef]
- Deshpande, S.; Sundsbø, P.; Das, S. Ship resistance analysis using CFD simulations in Flow-3D. Int. J. Multiphysics 2020, 14, 227–236. [Google Scholar]
- Liu, S.; Shang, B.; Papanikolaou, A.; Bolbot, V. Improved formula for estimating added resistance of ships in engineering applications. J. Mar. Sci. Appl. 2016, 15, 442–451. [Google Scholar] [CrossRef]
- Sigmund, S.; el Moctar, O. Numerical and experimental investigation of propulsion in waves. Ocean. Eng. 2017, 144, 35–49. [Google Scholar] [CrossRef]
- Blendermann, W. Schiffsform und Windlast: Korrelations- und Regressionsanalyse Von Windkanalmessungen Am Modell; Schriftenreihe Schiffbau, Technische Universität Hamburg Harburg: Hamburg, Germany, 1993. [Google Scholar]
- Andersen, I.M.V. Wind loads on post-panamax container ship. Ocean. Eng. 2013, 58, 115–134. [Google Scholar] [CrossRef]
- Blendermann, W. Parameter identification of wind loads on ships. J. Wind. Eng. Ind. Aerodyn. 1996, 51, 339–351. [Google Scholar] [CrossRef]
- Tupper, C.E. Introduction to Naval Architecture; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Bernitsas, M.; Ray, D.; Kinley, P. Kt, Kq and Efficiency Curves for the Wageningen B-Series Propeller; Department of Naval Architecture and Marine Engineering, College of Engineering, The University of Michigan: Ann Arbor, MI, USA, 1981. [Google Scholar]
- Reyad, M.; Sarhan, A.M.; Arafa, M. A modified adam algorithm for deep neural network optimization. Neural Comput. Appl. 2023, 35, 17095–17112. [Google Scholar] [CrossRef]
- Jiao, Z.; Ji, C.; Sun, Y.; Hong, Y.; Wang, Q. Deep learning based quantitative property consequence relationship (QPCR) models for toxic dispersion prediction. Process Saf. Environ. Prot. 2021, 152, 352–360. [Google Scholar] [CrossRef]
- Ji, C.; Yuan, S.; Jiao, Z.; Huffmana, M.; El-Halwagi, M.M.; Wang, Q. Predicting flammability-leading properties for liquid aerosol safety. Process Saf. Environ. Prot. 2021, 148, 1357–1366. [Google Scholar] [CrossRef]
- Bisong, E. Building Machine Learning and Deep Learning Models on Google Cloud Platform; Apress: New York, NY, USA, 2019. [Google Scholar]
- La Ferlita, A.; Di Nardo, E.; Macera, M.; Lindemann, T.; Ciaramella, A.; Koulianos, N. A Deep Neural Network to Predict the Residual Hull Girder Strength; SNAME Maritime Conventio: Houston, TX, USA, 2022. [Google Scholar]
- Verleysen, M.; Damien, F. The curse of dimensionality in data mining and time series prediction. In International Work-Conference on Artificial Neural Networks; Springer: Berlin, Germany, 2005. [Google Scholar]
- Ramachandran, P.; Zoph, B.; Le Quoc, V.; Le, V. Searching for activation functions. arXiv 2017, arXiv:1710.05941. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Advantages | Disadvantages | Literature |
|---|---|---|---|
| Admiralty coefficient | Simple, first estimate during the design process. | Rough method, no (operational) parameters included. | Gupta et al., 2021 [5] |
| Standard Series Data Holtrop–Mennen Guldhammer–Harvald Taylor–Gertler, Series 60 Hollenbach | Power requirements for a given hull form. | Background and scope of application must be known. | Holtrop and Mennen, 1982 [6] Guldhammer and Harvald, 1974 [7]. Hollenbach, 1998 [8] |
| Computational fluid dynamics (CFD) Reynolds-averaged Navier–Stokes (RANS) solver | Accounts for viscous and free-surface flows, predicts calm-water resistance in a few hours. | Time-consuming, advanced method, requires experience and knowledge. | Molland et al., 2017 [9] |
| Machine-learning methods (e.g., artificial neural networks (ANNs) and deep feed-forward networks (DFNs)) | Effective method to predict data patterns and solve complex problems if sufficient training data are available. Learn and train collected fuel consumption data repeatedly. Simulate relationship between fuel consumption and input data [5]. | Internal parameters affect output data. Difficult to identify problematic areas [10]. | Fan et al., 2022 [10] Lee et al., 2021 [11] |
| Ship Particulars and Engine Characteristics | Value |
|---|---|
| LOA (m) | 367.0 |
| LPP (m) | 350.0 |
| Breadth (m) | 51.0 |
| Depth (m) | 30.4 |
| Design draft (m) | 14.5 |
| Displacement at design draft (tons) | 194,878 |
| Scantling draft (m) | 15.5 |
| M/E cylinders | 9 |
| DMCR (kW) | 46,900 |
| Propeller diameter (m) | 10.0 |
| Propeller pitch (m) | 9.3 |
| Scenario | Normalized RMSE (Physical Model) | Normalized RMSE (DNN Method) | Normalized MAE (Physical Model) | Normalized MAE (DNN Method) |
|---|---|---|---|---|
| A | 0.0465 | 0.0177 | 0.0422 | 0.0151 |
| B | 0.0344 | 0.0242 | 0.0300 | 0.0202 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
La Ferlita, A.; Qi, Y.; Di Nardo, E.; Moenster, K.; Schellin, T.E.; EL Moctar, O.; Rasewsky, C.; Ciaramella, A. Power Prediction of a 15,000 TEU Containership: Deep-Learning Algorithm Compared to a Physical Model. J. Mar. Sci. Eng. 2023, 11, 1854. https://doi.org/10.3390/jmse11101854
La Ferlita A, Qi Y, Di Nardo E, Moenster K, Schellin TE, EL Moctar O, Rasewsky C, Ciaramella A. Power Prediction of a 15,000 TEU Containership: Deep-Learning Algorithm Compared to a Physical Model. Journal of Marine Science and Engineering. 2023; 11(10):1854. https://doi.org/10.3390/jmse11101854
Chicago/Turabian StyleLa Ferlita, Alessandro, Yan Qi, Emanuel Di Nardo, Karoline Moenster, Thomas E. Schellin, Ould EL Moctar, Christoph Rasewsky, and Angelo Ciaramella. 2023. "Power Prediction of a 15,000 TEU Containership: Deep-Learning Algorithm Compared to a Physical Model" Journal of Marine Science and Engineering 11, no. 10: 1854. https://doi.org/10.3390/jmse11101854
APA StyleLa Ferlita, A., Qi, Y., Di Nardo, E., Moenster, K., Schellin, T. E., EL Moctar, O., Rasewsky, C., & Ciaramella, A. (2023). Power Prediction of a 15,000 TEU Containership: Deep-Learning Algorithm Compared to a Physical Model. Journal of Marine Science and Engineering, 11(10), 1854. https://doi.org/10.3390/jmse11101854