
Numerical Investigation on the Hydrodynamic Response of Pentamaran—Resistance Analysis of Different Outrigger Inclination Angles



Abstract
1. Introduction
2. Numerical Modelling
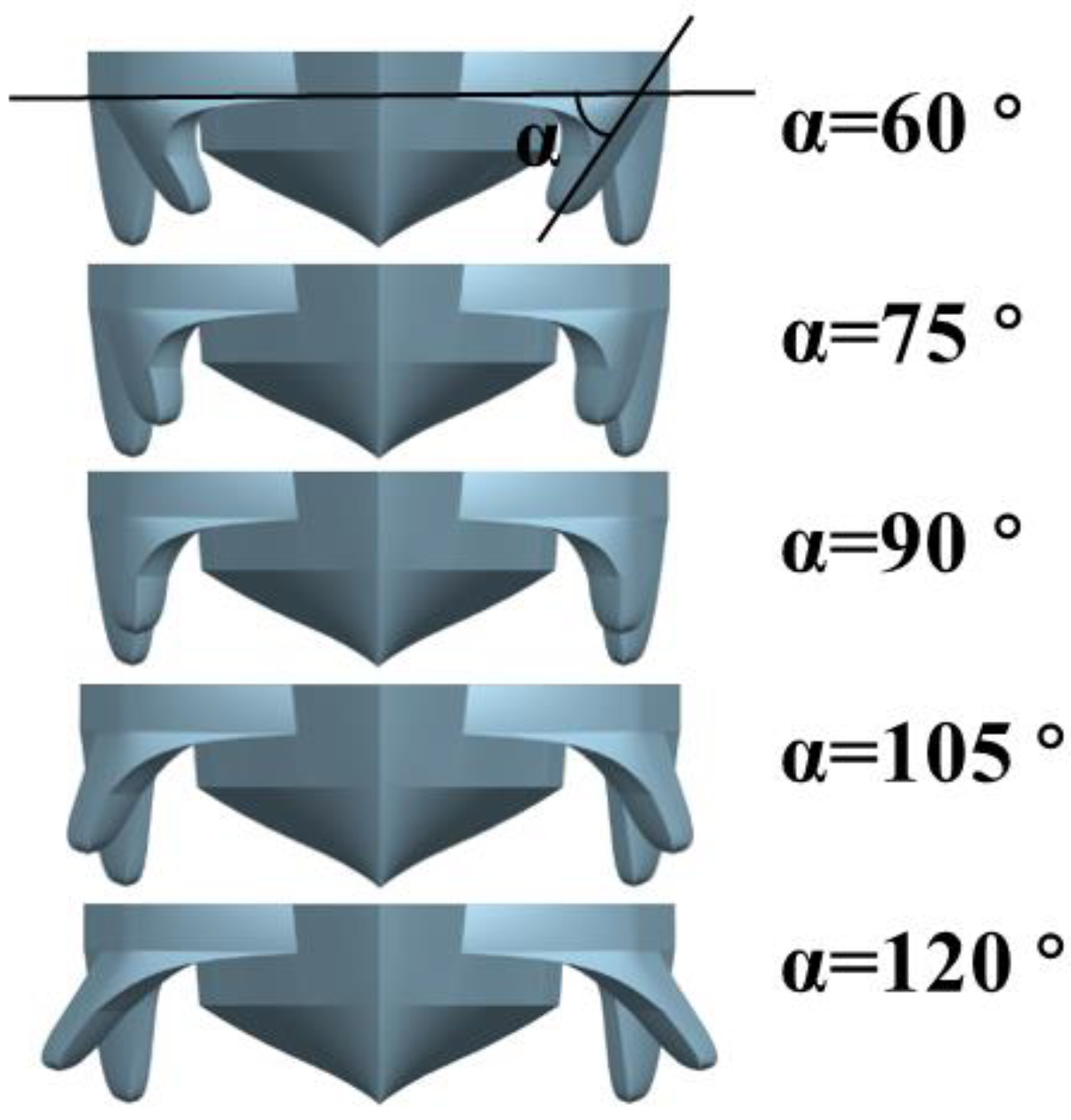
2.1. Pentamaran
2.2. Model Configuration
2.2.1. Simulation Approaching
2.2.2. Computational Domain and Mesh Generation
2.2.3. Sensitive Study of Mesh Numbers and Time Step
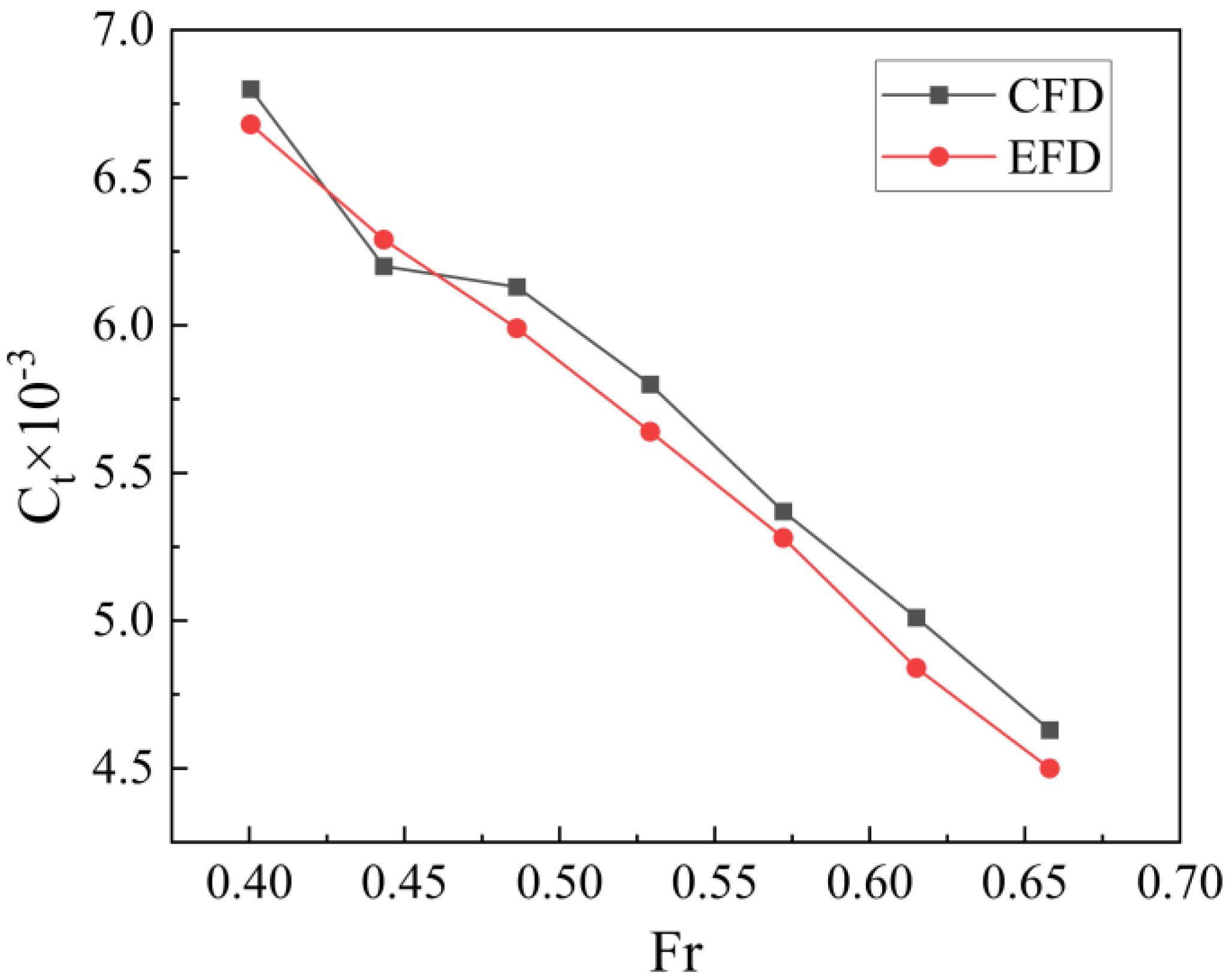
2.3. Model Validation
3. Numerical Results and Discussion
3.1. Hydrostatic Results
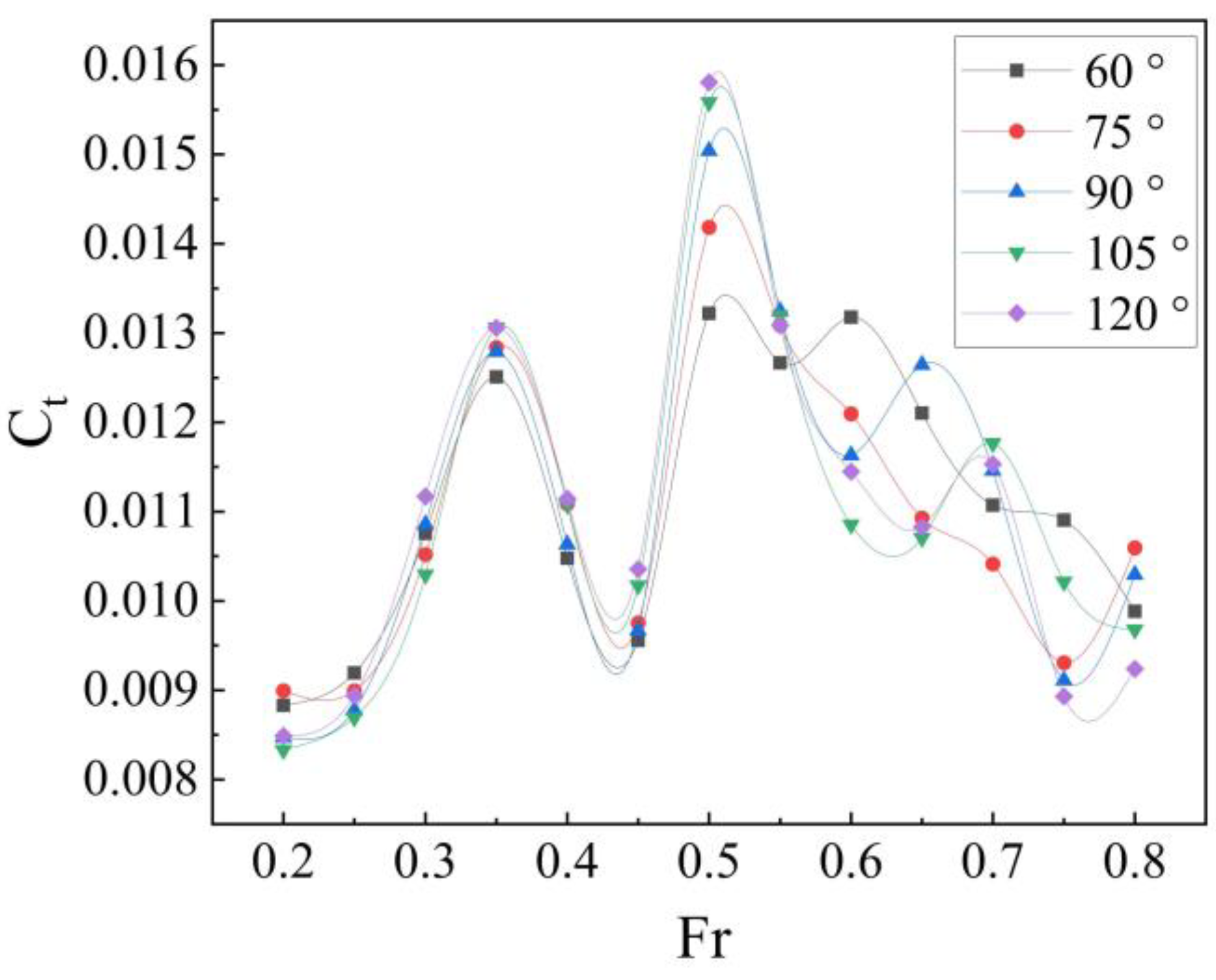
3.1.1. Total drag Coefficient under Static Water
3.1.2. Free Surface Wave Generation and Hull Pressure Analysis
3.2. Resistance of a Pentamaran in Waves
3.3. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zaghi, S.; Broglia, R.; Di Mascio, A. Analysis of the interference effects for high-speed catamarans by model tests and numerical simulations. Ocean Eng. 2011, 38, 2110–2122. [Google Scholar] [CrossRef]
- Sulistyawati, W.; Pamitran, A.S. Michell’s thin ship theory in optimization of warp-chine on pentamaran configuration. J. Appl. Fluid Mech. 2019, 13, 909–921. [Google Scholar]
- Tarafder, M.S.; Ali, M.T.; Nizam, M.S. Numerical prediction of wave-making resistance of pentamaran in unbounded water using a surface panel method. J. Procedia Eng. 2013, 56, 287–296. [Google Scholar] [CrossRef]
- Sulistyawati, W. CFD investigation of pentamaran ship model with chine hull form on the resistance characteristics. IOP Conf. Ser. Mater. Sci. Eng. 2018, 316, 012059. [Google Scholar]
- Sulistyawati, W.; Pamitran, A.S. Warp-chine on pentamaran hydrodynamics considering to reduction in ship power energy. Energy Procedia 2019, 156, 463–468. [Google Scholar] [CrossRef]
- Wang, C.-N.; Yang, F.-C.; Nguyen, V.T.T.; Vo, N.T.M. CFD Analysis and Optimum Design for a Centrifugal Pump Using an Effectively Artificial Intelligent Algorithm. Micromachines 2022, 13, 1208. [Google Scholar] [CrossRef]
- Waskito, K.T.; Karim, S.; Ichsan, M. Interference resistance of pentamaran ship model with asymmetric outrigger configura-tions. J. Mar. Sci. Appl. 2017, 16, 42–47. [Google Scholar]
- Wiwin, S. Pentamaran configuration design with modeling hull form for resistance minimization. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2018; Volume 105, p. 012043. [Google Scholar]
- Nguyen, T.V.T.; Huynh, N.-T.; Vu, N.-C.; Kieu, V.N.D.; Huang, S.-C. Optimizing compliant gripper mechanism design by employing an effective bi-algorithm: Fuzzy logic and ANFIS. Microsyst. Technol. 2021, 27, 3389–3412. [Google Scholar] [CrossRef]
- Vernengo, G.; Brizzolara, S. Numerical investigation on the hydrodynamic performance of fast SWATHs with optimum canted struts arrangements. Appl. Ocean Res. 2017, 63, 76–89. [Google Scholar] [CrossRef]
- Deng, R.; Luo, F.; Wu, T.; Chen, S.; Li, Y. Time-domain numerical research of the hydrodynamic characteristics of a trimaran in calm water and regular waves. Ocean Eng. 2019, 194, 106669. [Google Scholar] [CrossRef]
- Le Chau, N.; Dao, T.-P.; Nguyen, V.T.T. An Efficient Hybrid Approach of Finite Element Method, Artificial Neural Network-Based Multiobjective Genetic Algorithm for Computational Optimization of a Linear Compliant Mechanism of Nanoindentation Tester. Math. Probl. Eng. 2018, 2018, 7070868. [Google Scholar]
- Ni, C.-B.; Zhu, R.-C.; Miao, G.-P.; Fan, J. Hull Gesture and Resistance Prediction of High-Speed Vessels. J. Hydrodyn. 2011, 23, 234–240. [Google Scholar] [CrossRef]
- Deng, R.; Li, C.; Huang, D.; Zhou, G. The Effect of Trimming and Sinkage on the Trimaran Resistance Calculation. Procedia Eng. 2015, 126, 327–331. [Google Scholar] [CrossRef]
- Shahid, M.; Huang, D. Resistance calculations of trimaran hull form using computational fluid dynamics. In Proceedings of the 2011 Fourth International Joint Conference on Computational Sciences and Optimization, Kunming and Lijiang, China, 15–19 April 2011; pp. 81–85. [Google Scholar]
- De Luca, F.; Mancini, S.; Miranda, S.; Pensa, C. An extended verification and validation study of CFD simulations for planing hulls. J. Ship Res. 2016, 60, 101–118. [Google Scholar] [CrossRef]
- Bulian, G.; Francescutto, A. Experimental results and numerical simulations on strongly non-linear rolling of multihull ships ship in moderate beam seas. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2009, 223, 189–210. [Google Scholar]
- Broglia, R.; Jacob, B.; Zaghi, S.; Stern, F.; Olivieri, A. Experimental investigation of interference effects for high-speed catamarans. Ocean Eng. 2014, 76, 75–85. [Google Scholar] [CrossRef]
- Wang, S.; Duan, W.; Xu, Q.; Duan, F.; Deng, G.; Li, Y. Study on fast interference wave resistance optimization method for trimaran outrigger layout. Ocean Eng. 2021, 232, 109104. [Google Scholar] [CrossRef]
- Duan, W.Y.; Wang, S.M.; Ma, S. Verification of application of the 2.5 D method in high-speed trimaran vertical motion and added resistance prediction. J. Ocean. Eng. 2019, 187, 106177. [Google Scholar] [CrossRef]
- Nowruzi, L.; Enshaei, H.; Lavroff, J.; Kianejad, S.S.; Davis, M.R. CFD Simulation of Motion Response of a Trimaran in Regular Head Waves. Int. J. Marit. Eng. 2020, 162, 91. [Google Scholar] [CrossRef]
- Gong, J.; Yan, S.; Ma, Q.; Li, Y. Added resistance and seakeeping performance of trimarans in oblique waves. Ocean Eng. 2020, 216, 107721. [Google Scholar] [CrossRef]
- Ghadimi, P.; Nazemian, A.; Karam, S. Numerical simulation of the seakeeping of a military trimaran hull by a novel overset mesh method in regular and irregular waves. J. Marit. Univ. Szczec. 2021, 65, 38–50. [Google Scholar]
- Andrun, M.; Blagojević, B.; Bašić, J. The influence of numerical parameters in the finite-volume method on the Wigley hull resistance. Proceedings of the Institution of Mechanical Engineers, Part M. J. Eng. Marit. Environ. 2019, 233, 1123–1132. [Google Scholar]
- Mousaviraad, S.M.; Sadat-Hosseini, S.H.; Carrica, P.M.; Stern, F. Ship–Ship interactions in calm water and waves. Part 2: URANS validation in replenishment and overtaking conditions. J. Ocean. Eng. 2016, 111, 627–638. [Google Scholar] [CrossRef]
- Tezdogan, T.; Demirel, Y.K.; Kellett, P.; Khorasanchi, M.; Incecik, A.; Turan, O. Full-scale unsteady RANS CFD simulations of ship behaviour and performance in head seas due to slow steaming. Ocean Eng. 2015, 97, 186–206. [Google Scholar] [CrossRef]
- Ravenna, R.; Song, S.; Shi, W.; Sant, T.; Muscat-Fenech, C.D.M.; Tezdogan, T.; Demirel, Y.K. CFD analysis of the effect of heterogeneous hull roughness on ship resistance. Ocean Eng. 2022, 258, 111733. [Google Scholar] [CrossRef]
- Ji, S.C.; Ouahsine, A.; Smaoui, H.; Sergent, P. 3-D Numerical Simulation of Convoy-Generated Waves in a Restricted Waterway. J. Hydrodyn. 2012, 24, 420–429. [Google Scholar] [CrossRef]
- Nazemian, A.; Ghadimi, P. Multi-objective optimization of trimaran sidehull arrangement via surrogate-based approach for reducing resistance and improving the seakeeping performance. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2021, 235, 944–956. [Google Scholar] [CrossRef]
- Farkas, A.; Degiuli, N.; Martić, I. Numerical simulation of viscous flow around a tanker model. Brodogr. Teor. I Praksa Brodogr. I Pomor. Teh. 2017, 68, 109–125. [Google Scholar]
- Quérard, A.; Temarel, P.; Turnock, S.R. Influence of viscous effects on the hydrodynamics of ship-like sections undergoing symmetric and anti-symmetric motions, using RANS. In Proceedings of the ASME 2008 27th International Conference on Offshore Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008; Volume 48227, pp. 683–692. [Google Scholar]
- Li, Y.; Gong, J.; Ma, Q.; Yan, S. Effects of the terms associated with ϕzz in free surface condition on the attitudes and resistance of different ships. Eng. Anal. Bound. Elem. 2018, 95, 266–285. [Google Scholar] [CrossRef]
- Siemens, P.L.M. STAR-CCM+ User Guide Version 13.04.J.; Siemens PLM Software Inc.: Munich, Germany, 2019. [Google Scholar]
- Sun, H.B.; Yang, S.Q.; Xu, Y.F.; Xiao, J.F. Prediction of the Pitch and Heave Motions in Regular Waves of the DTMB 5415 Ship Using CFD and MMG. J. Mar. Sci. Eng. 2022, 10, 1358. [Google Scholar] [CrossRef]
- Zhang, X.; Lin, Z.; Mancini, S.; Li, P.; Liu, D.; Liu, F.; Pang, Z. Numerical Investigation into the Effect of Damage Openings on Ship Hydrodynamics by the Overset Mesh Technique. J. Mar. Sci. Eng. 2019, 8, 11. [Google Scholar] [CrossRef]
- Begovic, E.; Day, A.H.; Incecik, A.; Mancini, S.; Pizzirusso, D. Roll damping assessment of intact and damaged ship by CFD and EFD methods. In Proceedings of the 12th International Conference on the Stability of Ships and Ocean Vehicles, Glasgow, UK, 14–19 June 2015; pp. 19–24. [Google Scholar]
- Dogrul, A.; Song, S.; Demirel, Y.K. Scale effect on ship resistance components and form factor. Ocean Eng. 2020, 209, 107428. [Google Scholar] [CrossRef]
- Kim, W.J.; Van, S.H.; Kim, D.H. Measurement of flows around modern commercial ship models. Exp. Fluids 2001, 31, 567–578. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Features | Symbol | Value |
|---|---|---|
| Length overall | LOA | 21.464 m |
| Length between perpendiculars | LPP | 21.464 m |
| Beam overall | B | 3.431 m |
| Volume displaced | ▽ | 33.457 m3 |
| Draft Amidships | d | 1 m |
| Wetted Area | S | 109.895 m2 |
| Pitch radius of gyration | kyy | 5.366 m |
| Block coefficient | CB | 0.454 |
| Distance between front and rear outriggers | S1 | 1.65 m |
| Distance between outrigger and stern | S2 | 4.90 m |
| Distance between rear outrigger and centerline | H1 | 2.58 m |
| Distance between front outrigger and centerline | H2 | 2.58 m |
| No. | Number of Grids (M) | Number of Grid Nodes (M) | (N) |
|---|---|---|---|
| A | 2.12 | 2.36 | 11,493.8 |
| B | 2.41 | 2.66 | 11,551.4 |
| C | 3.13 | 3.39 | 11,291.7 |
| D | 4.43 | 4.69 | 11,288.3 |
| E | 5.00 | 5.27 | 11,290.2 |
| F | 5.35 | 5.62 | 11,290.8 |
| No. | Time-Step (s) | (N) |
|---|---|---|
| 1 | 0.05 | 11,335.2 |
| 2 | 0.04 | 11,291.7 |
| 3 | 0.03 | 11,307.2 |
| 4 | 0.02 | 11,289.9 |
| 5 | 0.01 | 11,290.3 |
| Item | Ship | Model |
|---|---|---|
| Lpp (m) | 230.0 | 7.2786 |
| Lwl (m) | 232.5 | 7.3570 |
| Bwl (m) | 32.2 | 1.0190 |
| D (m) | 19.0 | 0.6013 |
| T (m) | 10.8 | 0.3418 |
| Displacement (t) | 52,030 | 1.6490 |
| (Present CFD) | (EFD, (Kim)) | (CFD (Dogrul)) | Discrepancy (EFD) | Discrepancy (CFD) |
|---|---|---|---|---|
| 3.528 × 10−3 | 3.556 × 10−3 | 3.544 × 10−3 | −0.78% | −0.45% |
| Fr | (m·s−1) | Fr | (m·s−1) |
|---|---|---|---|
| 0.2 | 2.901 | 0.55 | 7.977 |
| 0.25 | 3.626 | 0.6 | 8.700 |
| 0.3 | 4.351 | 0.65 | 9.427 |
| 0.35 | 5.076 | 0.7 | 10.152 |
| 0.4 | 5.801 | 0.75 | 10.878 |
| 0.45 | 6.527 | 0.8 | 11.603 |
| 0.5 | 7.252 |
| No. | Fr | (m·s−1) | Wave Length/ Captain λ/L | (N) | (N) | (N) | (N) | (N) |
|---|---|---|---|---|---|---|---|---|
| 1 | 0.3 | 4.351 | 1 | 10,089 | 10,360 | 10,402 | 10,296 | 10,304 |
| 2 | 0.5 | 7.252 | 1 | 21,832 | 21,880 | 21,924 | 21,477 | 23,469 |
| 3 | 0.7 | 10.152 | 1 | 33,441 | 29,180 | 28,829 | 27,727 | 30,716 |
| 4 | 0.3 | 4.351 | 1.25 | 10,828 | 10,999 | 11,099 | 11,023 | 11,419 |
| 5 | 0.5 | 7.252 | 1.25 | 22,865 | 22,269 | 22,236 | 21,917 | 23,180 |
| 6 | 0.7 | 10.152 | 1.25 | 35,087 | 29,699 | 29,204 | 28,489 | 30,851 |
| 7 | 0.3 | 4.351 | 1.5 | 10,263 | 10,474 | 11,059 | 10,621 | 11,751 |
| 8 | 0.5 | 7.252 | 1.5 | 23,740 | 22,546 | 22,356 | 22,047 | 23,329 |
| 9 | 0.7 | 10.152 | 1.5 | 36,501 | 30,189 | 29,663 | 28,879 | 32,002 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, P.; Cui, Y.; Zhao, C.; Li, Y.; Li, B. Numerical Investigation on the Hydrodynamic Response of Pentamaran—Resistance Analysis of Different Outrigger Inclination Angles. J. Mar. Sci. Eng. 2023, 11, 186. https://doi.org/10.3390/jmse11010186
Hu P, Cui Y, Zhao C, Li Y, Li B. Numerical Investigation on the Hydrodynamic Response of Pentamaran—Resistance Analysis of Different Outrigger Inclination Angles. Journal of Marine Science and Engineering. 2023; 11(1):186. https://doi.org/10.3390/jmse11010186
Chicago/Turabian StyleHu, Pengwei, Ying Cui, Chenyu Zhao, Yanan Li, and Boyang Li. 2023. "Numerical Investigation on the Hydrodynamic Response of Pentamaran—Resistance Analysis of Different Outrigger Inclination Angles" Journal of Marine Science and Engineering 11, no. 1: 186. https://doi.org/10.3390/jmse11010186
APA StyleHu, P., Cui, Y., Zhao, C., Li, Y., & Li, B. (2023). Numerical Investigation on the Hydrodynamic Response of Pentamaran—Resistance Analysis of Different Outrigger Inclination Angles. Journal of Marine Science and Engineering, 11(1), 186. https://doi.org/10.3390/jmse11010186