
A Frequency-Dependent Assimilation Algorithm: Ensemble Optimal Smoothing


Abstract
1. Introduction
2. Assimilation Theory
2.1. Overview of Sequential Ensemble-Based Assimilation
2.2. Ensemble Optimal Smoother (EnOS)
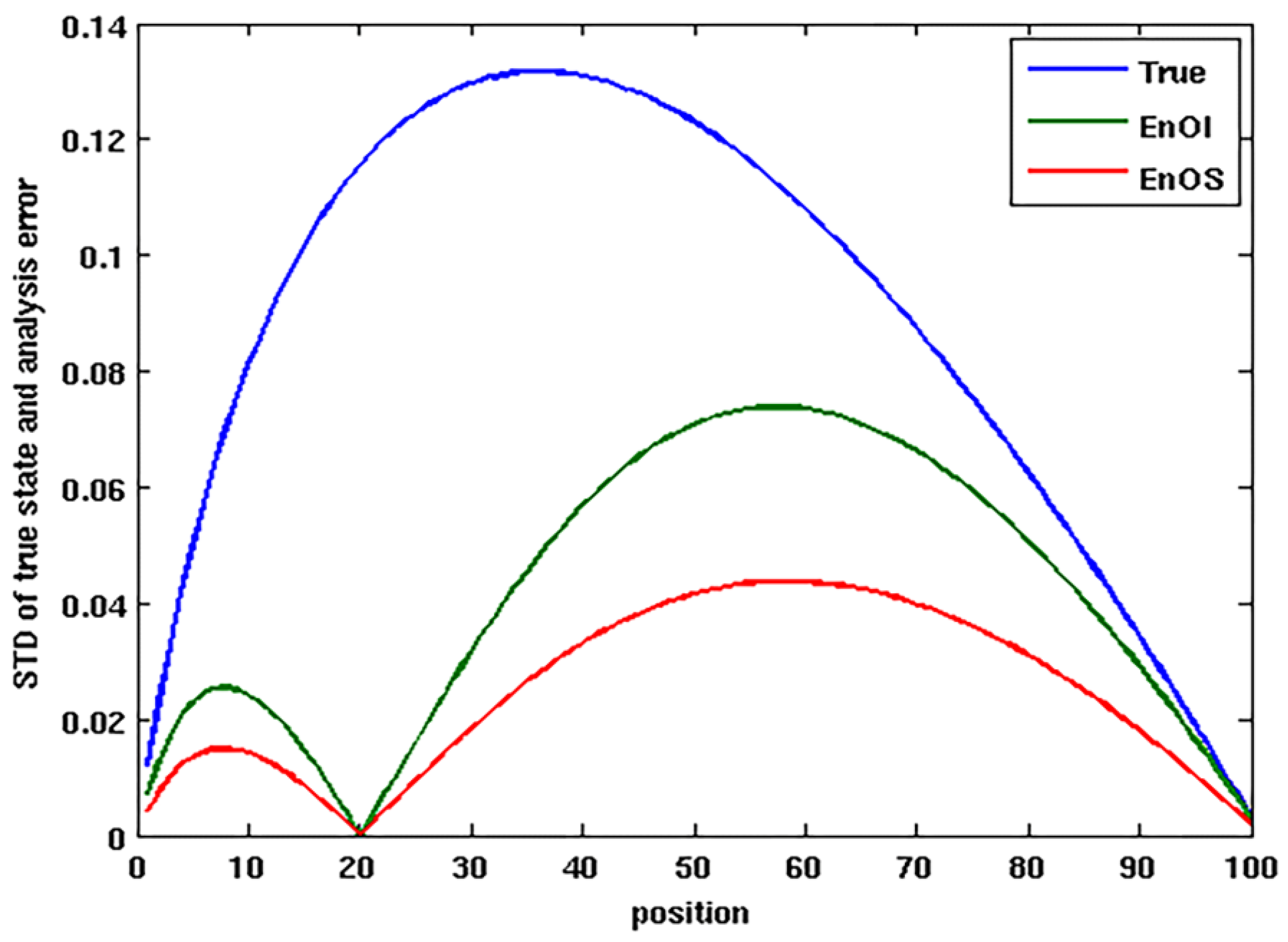
3. Idealized Linear Ocean Model
4. Sensitivity Analysis of Time-Dependent Term
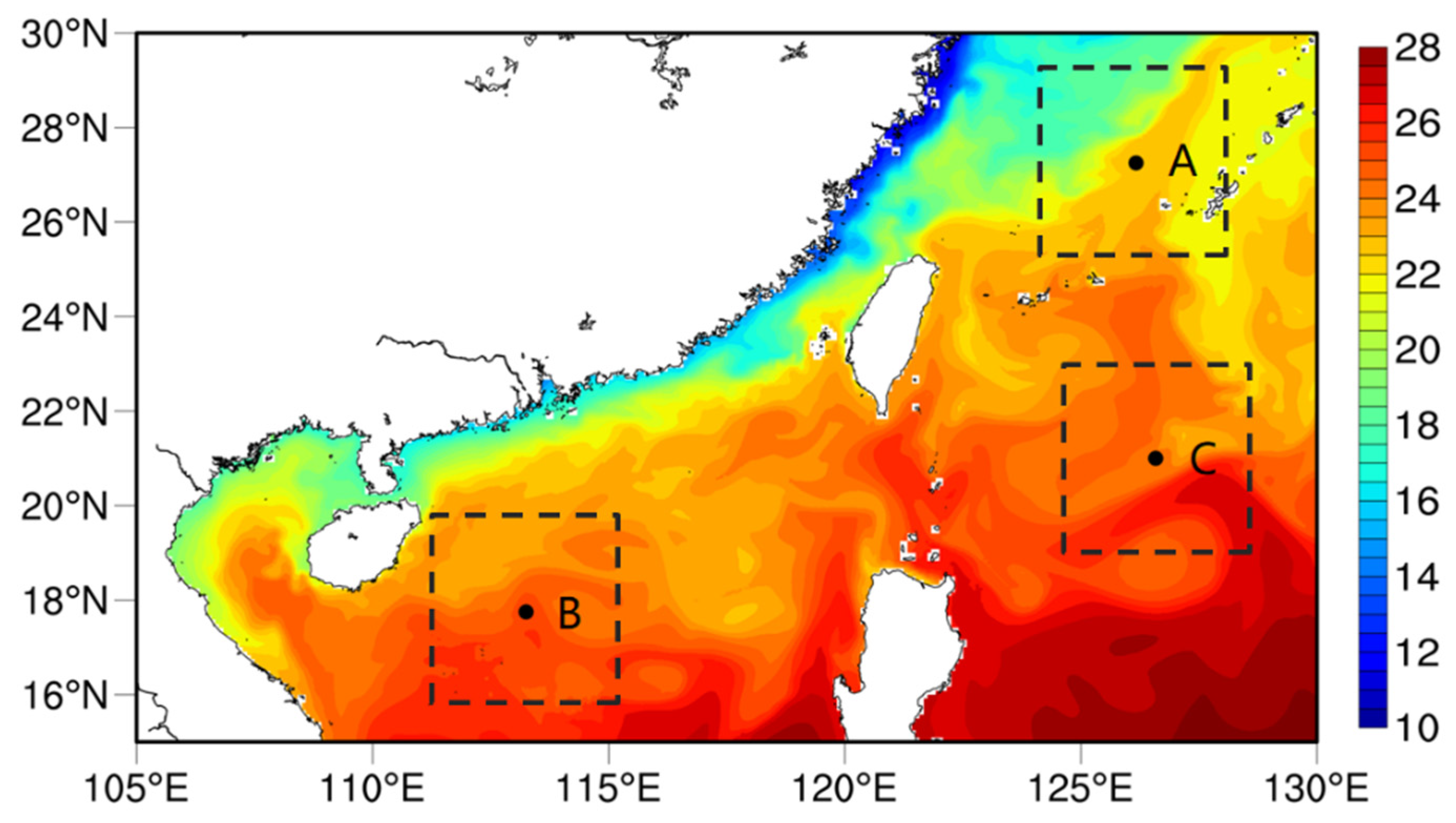
4.1. Data
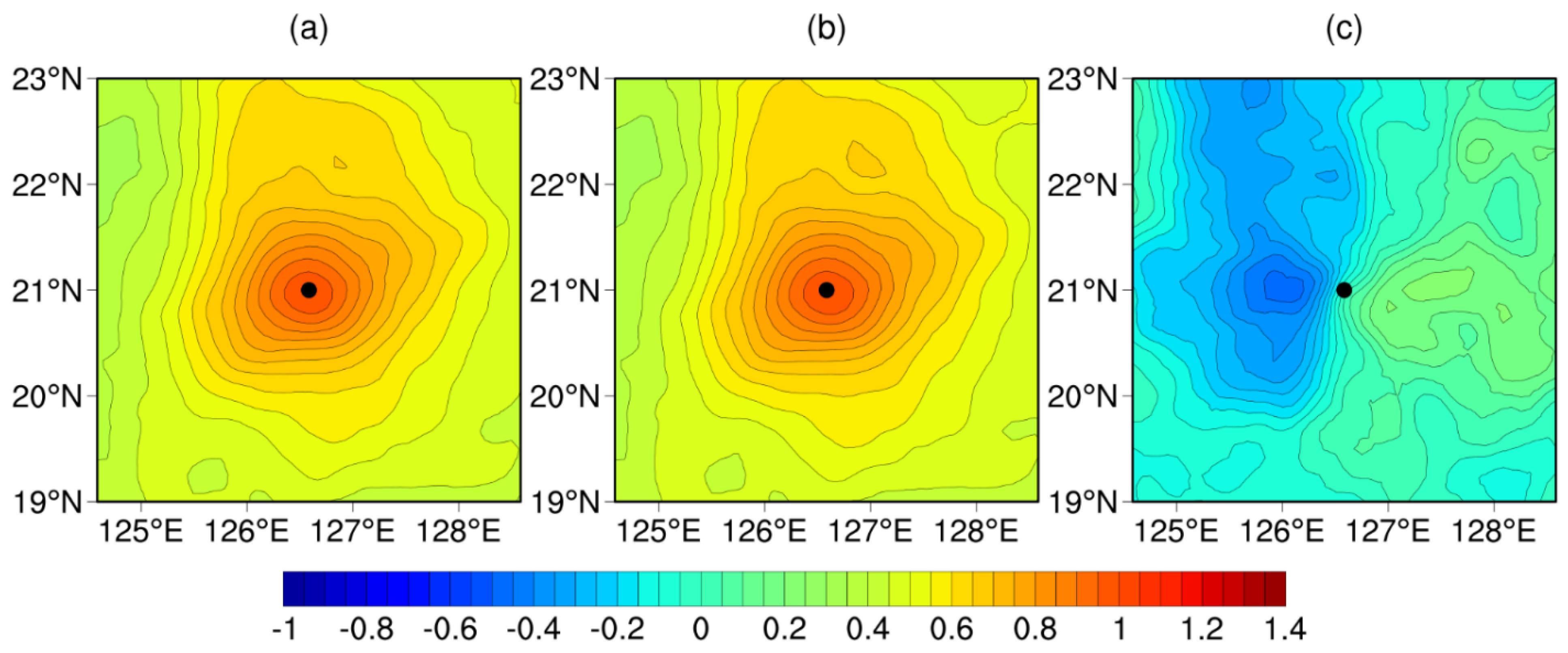
4.2. Single-Point Observation Experiments
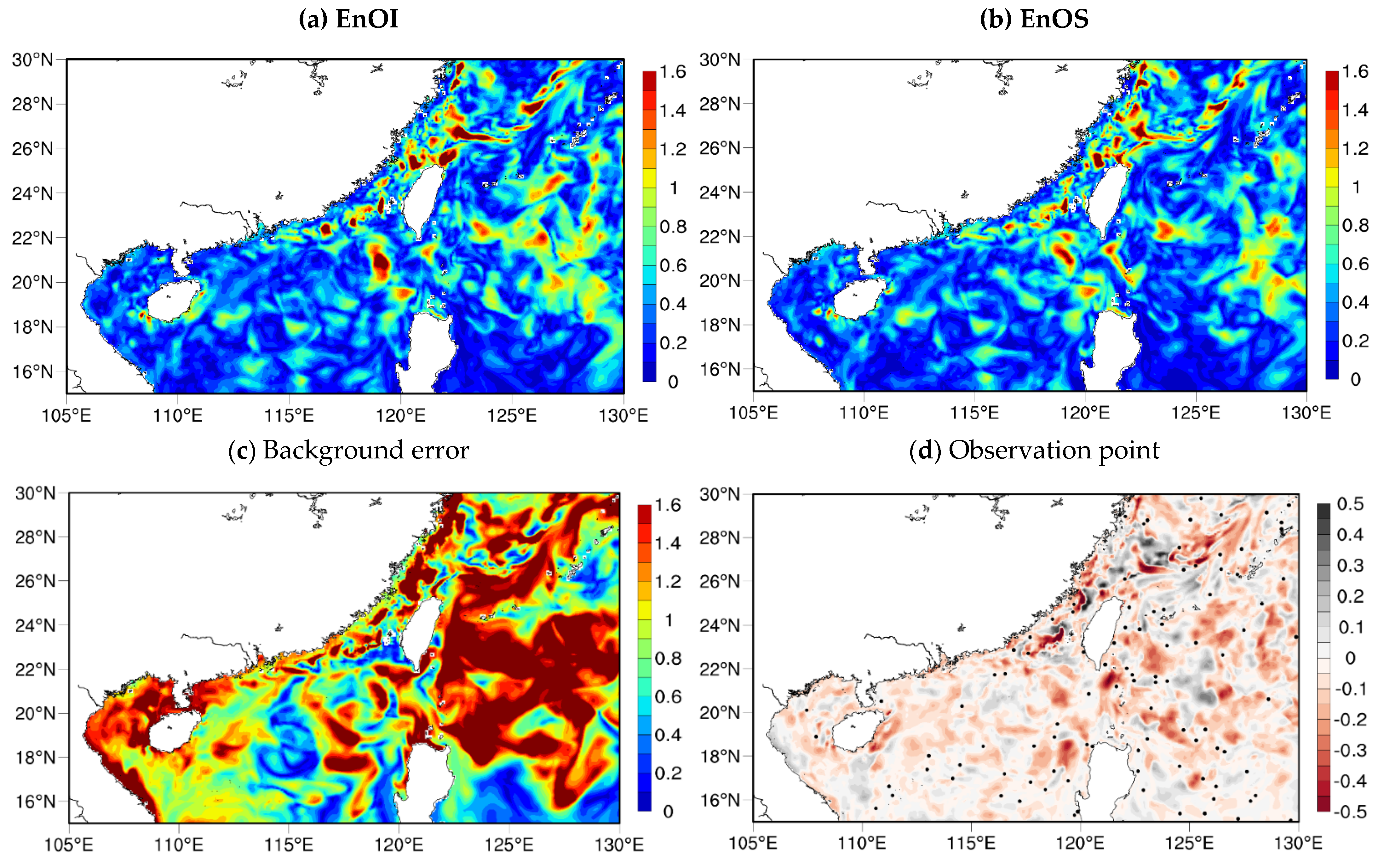
5. Validation Using the Reanalysis Data
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Burgers, G.; Leeuwen, P.J.; Evensen, G. Analysis scheme in the Ensemble Kalman Filter. Mon. Weather Rev. 1998, 126, 1719–1724. [Google Scholar] [CrossRef]
- Evensen, G.; Van Leeuwen, P.J. Assimilation of gestat altimeter data for the Agulhas current using the ensemble Kalman filter. Mon. Weather Rev. 1996, 124, 85–96. [Google Scholar] [CrossRef]
- Oke, P.R.; Chamberlain, M.A.; Fiedler, R.A.S.; de Oliveira, H.B.; Beggs, H.M.; Brassington, G.B. Combining Argo and Satellite Data Using Model-Derived Covariances: Blue Maps. Front. Earth Sci. 2021, 9, 696985. [Google Scholar] [CrossRef]
- Wikle, C.K.; Berliner, L.M. A Bayesian tutorial for data assimilation. Phys. D Nonlinear Phenom. 2007, 230, 1–16. [Google Scholar] [CrossRef]
- Gordon, N.; Salmond, D.; Smith, A. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proc. F (Radar Signal Process.) 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Evensen, G. Sequential data assimilation with a nonlinear quasi-geostrophic model using Monte Carlo methods to forecast error statistics. J. Geophys. Res. Oceans 1994, 99, 10143–10162. [Google Scholar] [CrossRef]
- Houtekamer, P.L. The Construction of Optimal Perturbations. Mon. Weather Rev. 1995, 123, 2888–2898. [Google Scholar] [CrossRef]
- Keppenne, C.L. Data assimilation into a primitive-equation model with a parallel ensemble Kalman filter. Mon. Weather Rev. 2000, 128, 1971–1981. [Google Scholar] [CrossRef]
- Mitchell, H.L.; Houtekamer, P.L.; Pellerin, G. Ensemble Size and Model-Error Representation in an Ensemble Kalman Filter. Mon. Weather Rev. 2002, 130, 2791–2808. [Google Scholar] [CrossRef]
- Mignac, D.; Tanajura, C.A.S.; Santana, A.N.; Lima, L.N.; Xie, J. Argo data assimilation into HYCOM with an EnOI method in the Atlantic Ocean. Ocean Sci. 2015, 11, 195–213. [Google Scholar] [CrossRef]
- Evensen, G. The Ensemble Kalman Filter: Theoretical formulation and practical implementation. Ocean Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Oke, P.R.; Allen, J.S.; Miller, R.N.; Egbert, G.D.; Kosro, P.M. Assimilation of surface velocity data into a primitive equation coastal ocean model. J. Geophys. Res. Oceans 2002, 107, 5-1–5-25. [Google Scholar] [CrossRef]
- Oke, P.R.; Schiller, A.; Griffin, D.A.; Brassington, G.B. Ensemble data assimilation for an eddy-resolving ocean model of the Australian region. Q. J. R. Meteorol. Soc. 2005, 131, 3301–3311. [Google Scholar] [CrossRef]
- Belyaev, K.; Kuleshov, A.; Smirnov, I.; Tanajura, C.A.S. Generalized Kalman Filter and Ensemble Optimal Interpolation, Their Comparison and Application to the Hybrid Coordinate Ocean Model. Mathematics 2021, 9, 2371. [Google Scholar] [CrossRef]
- Oke, P.R.; Sakov, P.; Corney, S.P. Impacts of localisation in the EnKF and EnOI: Experiments with a small model. Ocean Dyn. 2006, 57, 32–45. [Google Scholar] [CrossRef]
- Wang, X.; Hamill, T.M.; Whitaker, J.S.; Bishop, C.H. A Comparison of Hybrid Ensemble Transform Kalman Filter–Optimum Interpolation and Ensemble Square Root Filter Analysis Schemes. Mon. Weather Rev. 2007, 135, 1055–1076. [Google Scholar] [CrossRef]
- Wan, L.; Bertino, L.; Zhu, J. Assimilating Altimetry Data into a HYCOM Model of the Pacific: Ensemble Optimal Interpolation versus Ensemble Kalman Filter. J. Atmos. Ocean. Technol. 2010, 27, 753–765. [Google Scholar] [CrossRef]
- Zhang, S.; Anderson, J.L. Impact of spatially and temporally varying estimates of error covariance on assimilation in a simple atmospheric model. Tellus A Dyn. Meteorol. Oceanogr. 2016, 55, 126–147. [Google Scholar] [CrossRef]
- Barth, A.; Weisberg, R.H.; Alvera-Azcárate, A. Assimilation of high-frequency radar currents in a nested model of the West Florida Shelf. J. Geophys. Res. Oceans 2008, 113. [Google Scholar] [CrossRef]
- Xu, J.; Huang, J.; Gao, S.; Cao, Y. Assimilation of high frequency radar data into a shelf see circulation model. J. Ocean Univ. China 2014, 13, 572–578. [Google Scholar] [CrossRef]
- Castruccio, F.S.; Karspeck, A.R.; Danabasoglu, G.; Hendricks, J.; Hoar, T.; Collins, N.; Anderson, J.L. An EnOI-Based Data Assimilation System With DART for a High-Resolution Version of the CESM2 Ocean Component. J. Adv. Model. Earth Syst. 2020, 12, e2020MS002176. [Google Scholar] [CrossRef]
- Scott, K.A.; Chen, C.; Myers, P.G. Assimilation of Argo Temperature and Salinity Profiles Using a Bias-Aware EnOI Scheme for the Labrador Sea. J. Atmos. Ocean. Technol. 2018, 35, 1819–1834. [Google Scholar] [CrossRef]
- He, Z.; Thompson, K.R.; Ritchie, H.; Lu, Y.; Dupont, F. Reducing Drift and Bias of a Global Ocean Model by Frequency-Dependent Nudging. Atmosphere-Ocean 2014, 52, 242–255. [Google Scholar] [CrossRef]
- Katavouta, A.; Thompson, K.R. Downscaling ocean conditions: Experiments with a quasi-geostrophic model. Ocean Model. 2013, 72, 231–241. [Google Scholar] [CrossRef]
- McCalpin, J.D.; Haidvogel, D.B. Phenomenology of the low-frequency variability in a reduced-gravity, quasi-geostrophic double-gyre model. J. Phys. Oceanogr. 1996, 26, 739–752. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, S.; Li, S.; Liu, Z. Impact of the time scale of model sensitivity response on coupled model parameter estimation. Adv. Atmos. Sci. 2017, 34, 1346–1357. [Google Scholar] [CrossRef]
- Cohn, S.E.; Sivakumaran, N.S.; Todling, R. A Fixed-Lag Kalman Smoother for Retrospective Data Assimilation. Mon. Weather Rev. 1994, 122, 2838–2867. [Google Scholar] [CrossRef]
- Li, H.; Kalnay, E.; Miyoshi, T. Simultaneous estimation of covariance inflation and observation errors within an ensemble Kalman filter. Q. J. R. Meteorol. Soc. 2009, 135, 523–533. [Google Scholar] [CrossRef]
- Miyoshi, T.; Kalnay, E.; Li, H. Estimating and including observation-error correlations in data assimilation. Inverse Probl. Sci. Eng. 2012, 21, 387–398. [Google Scholar] [CrossRef]
- Anderson, J.L.; Anderson, S.L. A monte Carlo implementation of the nonlinear filtering problem to produce ensemble assimilations and forecasts. Mon. Weather Rev. 1999, 127, 2741–2758. [Google Scholar] [CrossRef]
- Gill, A.E. Atmosphere-Ocean Dynamics; Academic Press: San Diego, CA, USA, 1982; pp. 507–513. [Google Scholar]
- Jean-Michel, L.; Eric, G.; Romain, B.-B.; Gilles, G.; Angélique, M.; Marie, D.; Clément, B.; Mathieu, H.; Olivier, L.G.; Charly, R.; et al. The Copernicus Global 1/12° Oceanic and Sea Ice GLORYS12 Reanalysis. Front. Earth Sci. 2021, 9, 698876. [Google Scholar] [CrossRef]
- Drévillion, M.; Régnie, C.; Lellouche, J.; Garris, G.; Bricaud, C.; Hernandez, O. Quality Information Document for Global Ocean Reanalysis Products GLOBAL-REANALYSIS-PHY-001-030; Copernicus, Marine Environment Monitoring Service: Ramonville-Saint-Agne, France, 2021; pp. 1–48. [Google Scholar]
- Wu, B.; Zhou, T.; Zheng, F. EnOI-IAU Initialization Scheme Designed for Decadal Climate Prediction System IAP-DecPreS. J. Adv. Model. Earth Syst. 2018, 10, 342–356. [Google Scholar] [CrossRef]
- He, B.; Mitchell, H.L.; Charette, C.; Houtekamer, P.L.; Buehner, M. Intercomparison of Variational Data Assimilation and the Ensemble Kalman Filter for Global Deterministic NWP. Part I: Description and Single-Observation Experiments. Mon. Weather Rev. 2010, 138, 1550–1566. [Google Scholar] [CrossRef]
- Ichikawa, H.; Beardsley, R.C. Temporal and spatial variability of volume transport of the Kuroshio in the East China Sea. Deep Sea Res. Part I Oceanogr. Res. Pap. 1993, 40, 583–605. [Google Scholar] [CrossRef]
- He, Q.; Zhan, H.; Cai, S.; He, Y.; Huang, G.; Zhan, W. A New Assessment of Mesoscale Eddies in the South China Sea: Surface Features, Three-Dimensional Structures, and Thermohaline Transports. J. Geophys. Res. Oceans 2018, 123, 4906–4929. [Google Scholar] [CrossRef]
- He, Y.; Xie, J.; Cai, S. Interannual variability of winter eddy patterns in the eastern South China Sea. Geophys. Res. Lett. 2016, 43, 5185–5193. [Google Scholar] [CrossRef]
- Han, G.; Li, W.; Zhang, X.; Li, D.; He, Z.; Wang, X.; Wu, X.; Yu, T.; Ma, J. A regional ocean reanalysis system for coastal waters of China and adjacent seas. Adv. Atmos. Sci. 2011, 28, 682–690. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Evaluation Criteria | Method | Winter | Spring | Summer | Autumn |
|---|---|---|---|---|---|
| Root-Mean-Square error (RMSE) | EnOI | 0.54 | 0.58 | 0.41 | 0.40 |
| EnOS | 0.48 | 0.54 | 0.39 | 0.38 | |
| Performance gain | 11.02% | 7.15% | 3.03% | 2.35% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Z.; Zhao, Y.; Fu, X.; Sheng, X.; Xu, S. A Frequency-Dependent Assimilation Algorithm: Ensemble Optimal Smoothing. J. Mar. Sci. Eng. 2022, 10, 1324. https://doi.org/10.3390/jmse10091324
He Z, Zhao Y, Fu X, Sheng X, Xu S. A Frequency-Dependent Assimilation Algorithm: Ensemble Optimal Smoothing. Journal of Marine Science and Engineering. 2022; 10(9):1324. https://doi.org/10.3390/jmse10091324
Chicago/Turabian StyleHe, Zhongjie, Yueqi Zhao, Xiachuan Fu, Xin Sheng, and Siwen Xu. 2022. "A Frequency-Dependent Assimilation Algorithm: Ensemble Optimal Smoothing" Journal of Marine Science and Engineering 10, no. 9: 1324. https://doi.org/10.3390/jmse10091324
APA StyleHe, Z., Zhao, Y., Fu, X., Sheng, X., & Xu, S. (2022). A Frequency-Dependent Assimilation Algorithm: Ensemble Optimal Smoothing. Journal of Marine Science and Engineering, 10(9), 1324. https://doi.org/10.3390/jmse10091324