
On the Functionality of Radar and Laser Ocean Wave Sensors



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Instruments
2.1. Rosemount WaveRadar
2.2. OptechTM Laser
3. Methods
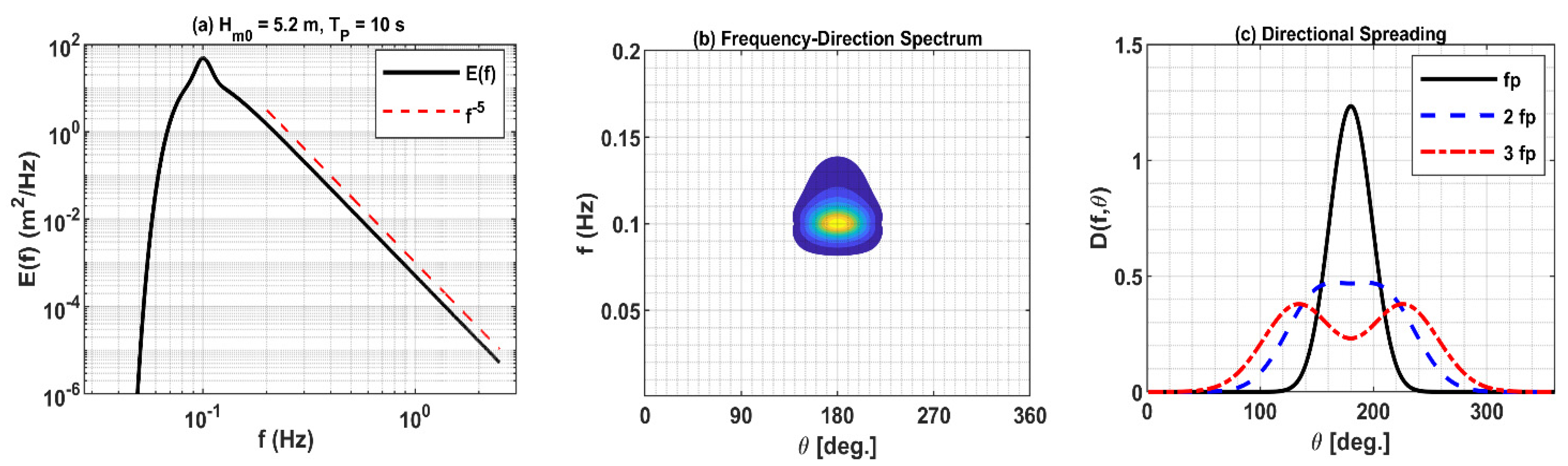
3.1. Surface Wave Simulations
3.2. Radar and Laser Simulations
- At each time step, simulated water surface regions (footprints) of the Radar () and the Laser () (Figure 1) with a spatial resolution of 0.01 m having a total of 251,001 and 256 grid points, respectively, are converted into a coordinate matrix.
- The location of the Radar and the Laser is fixed in space at the coordinate origin (0,0,0), located horizontally at the center of the water surface (footprint), and 30 m above mean water level for these simulations.
- The distance, of each grid point from the position of the instrument is calculated from the geometry.
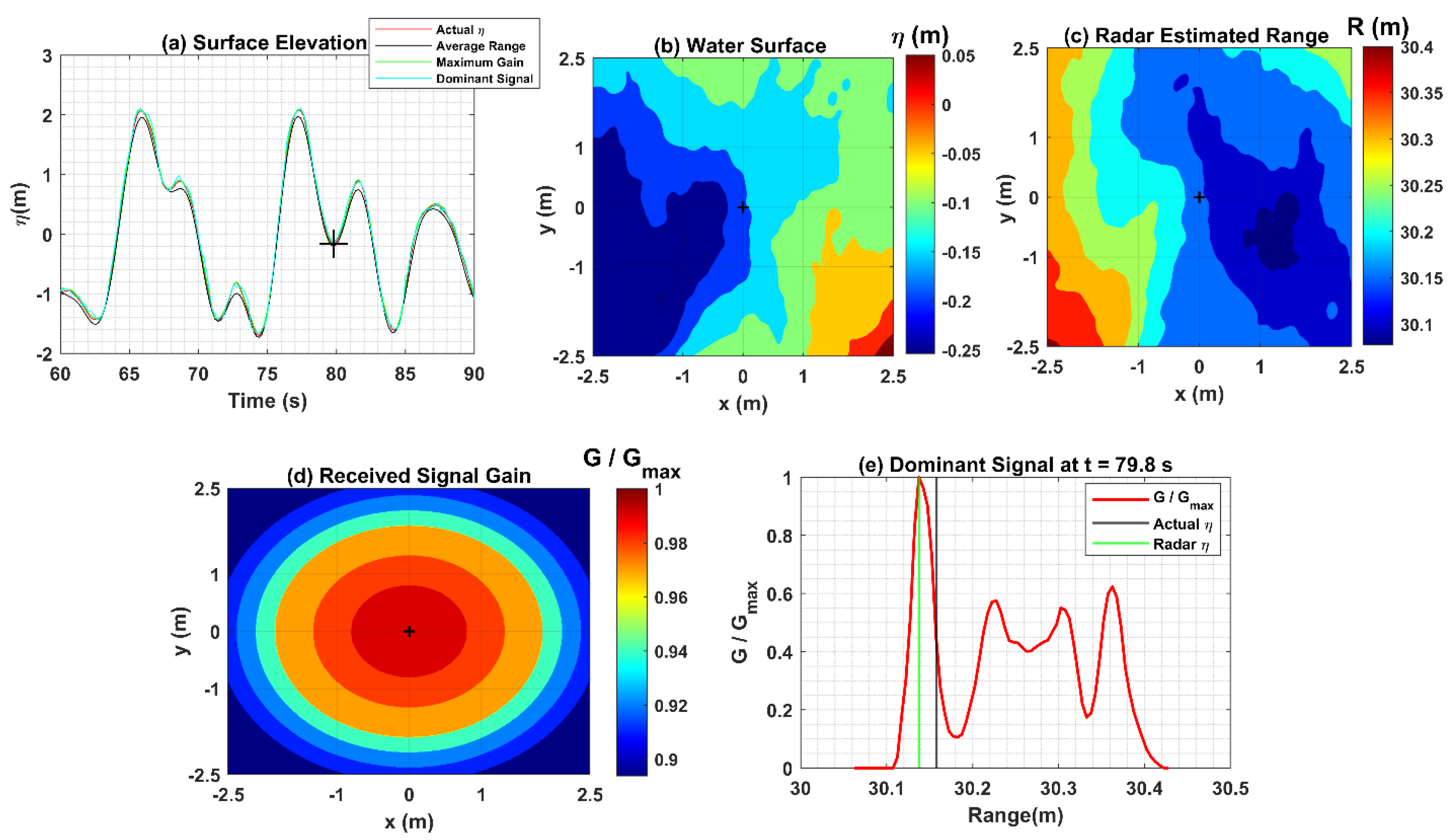
- At each time step, the signal strength in terms of gain (intensity), which is a function of range and beam divergence angle is given as: , where is the signal strength at the angle subtended by the point to downward vertical at the antenna location (0,0,0), where . is the gain attenuation associated with the path loss over the range (. is the diffuse reflection coefficient.
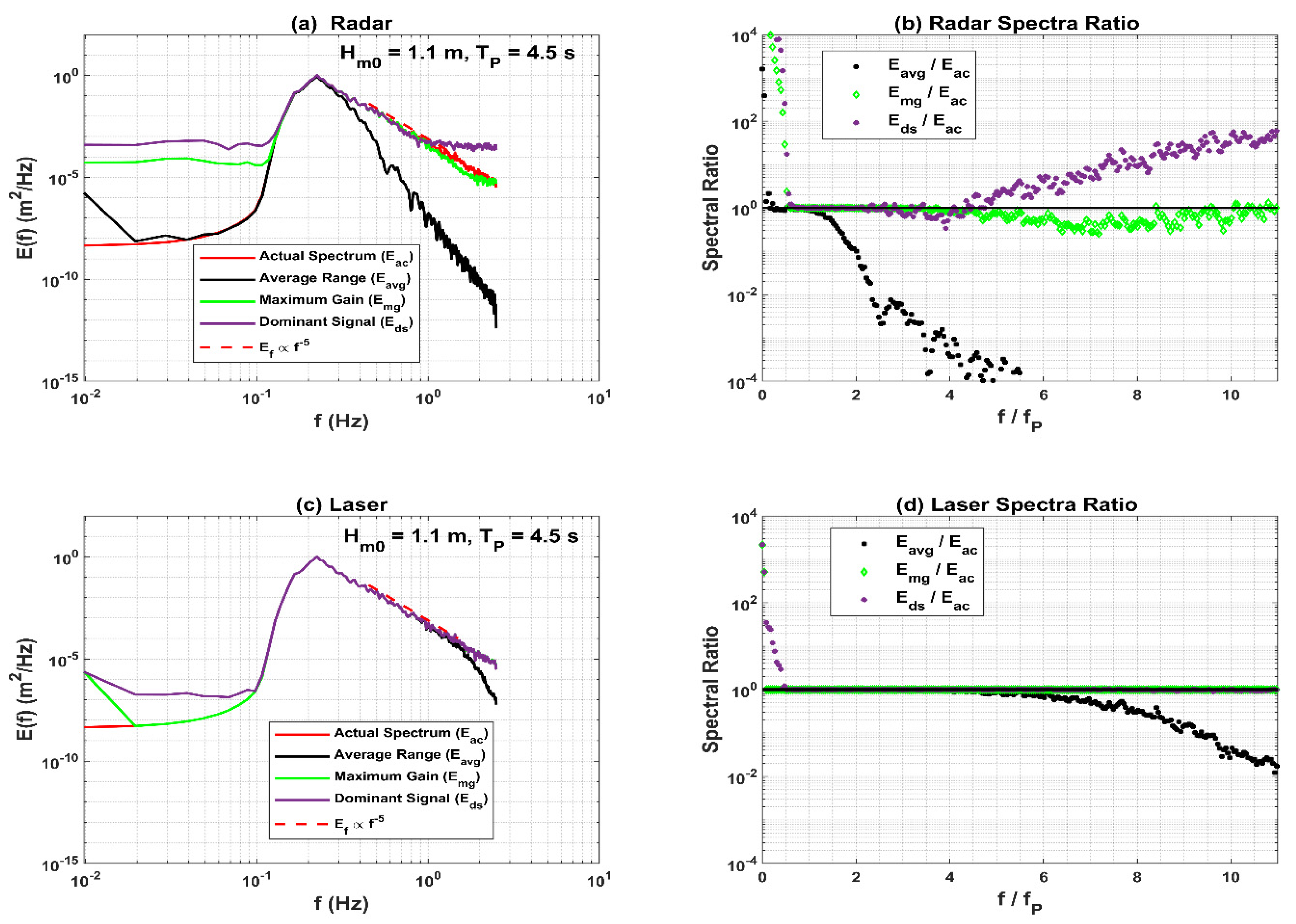
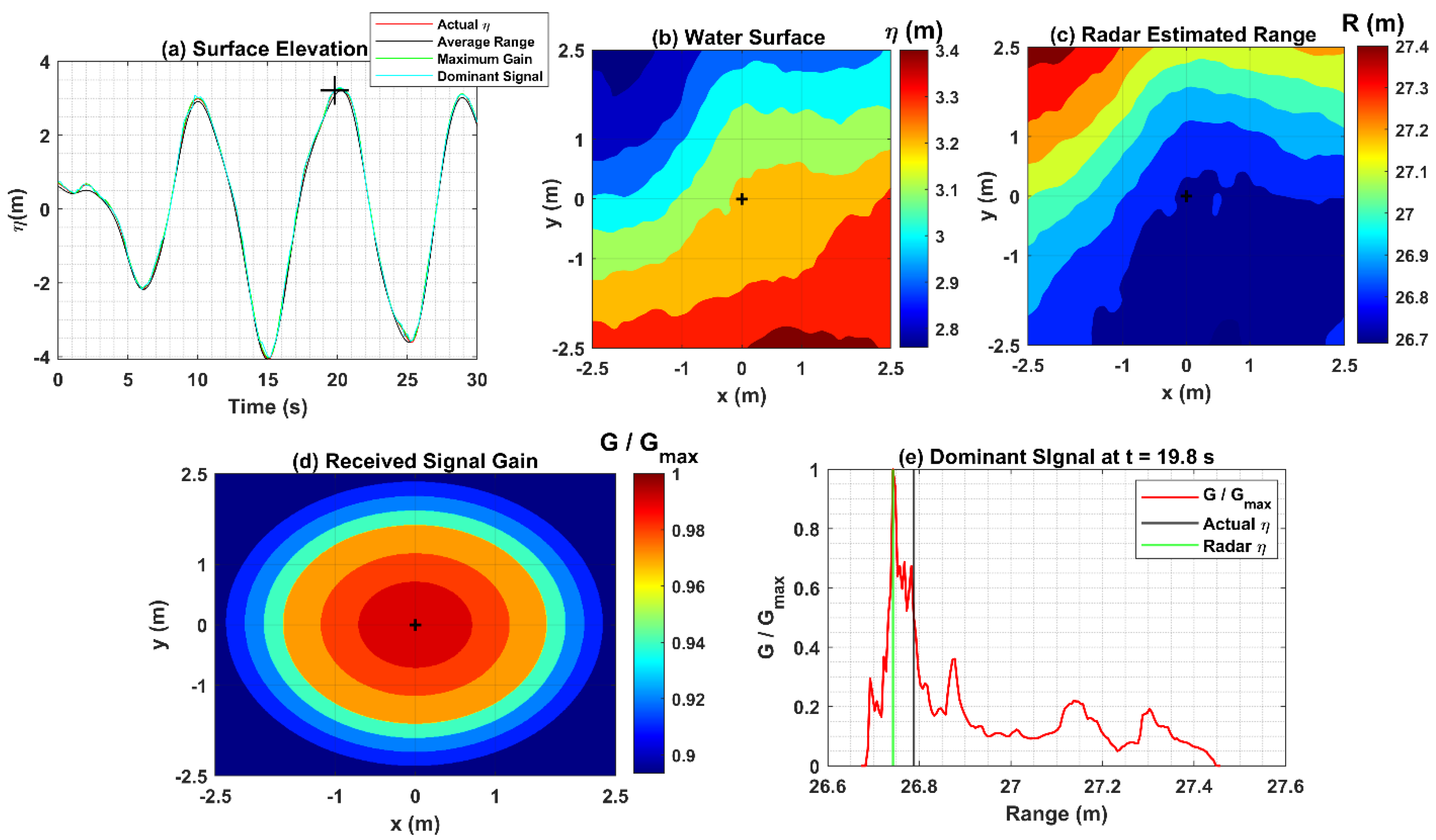
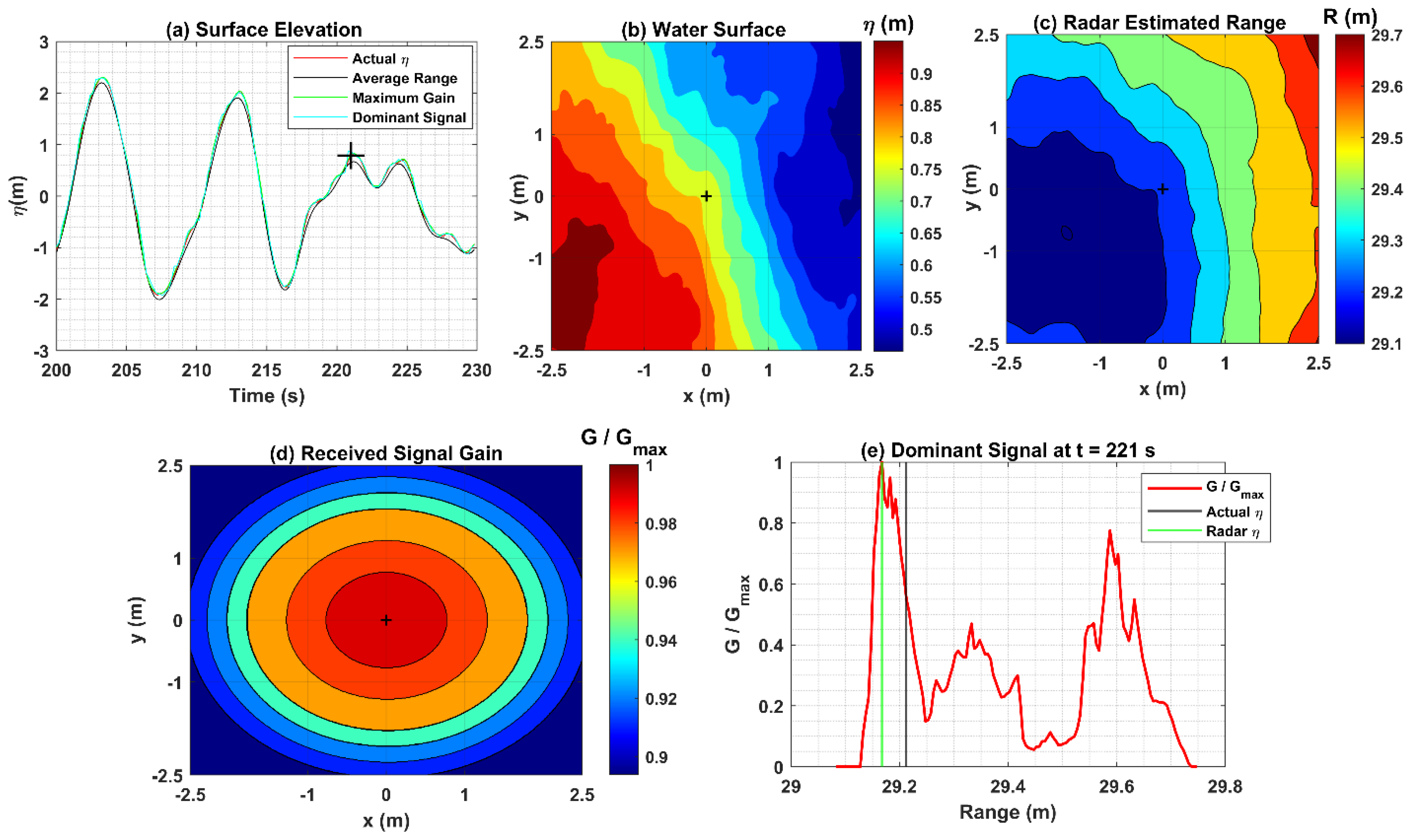
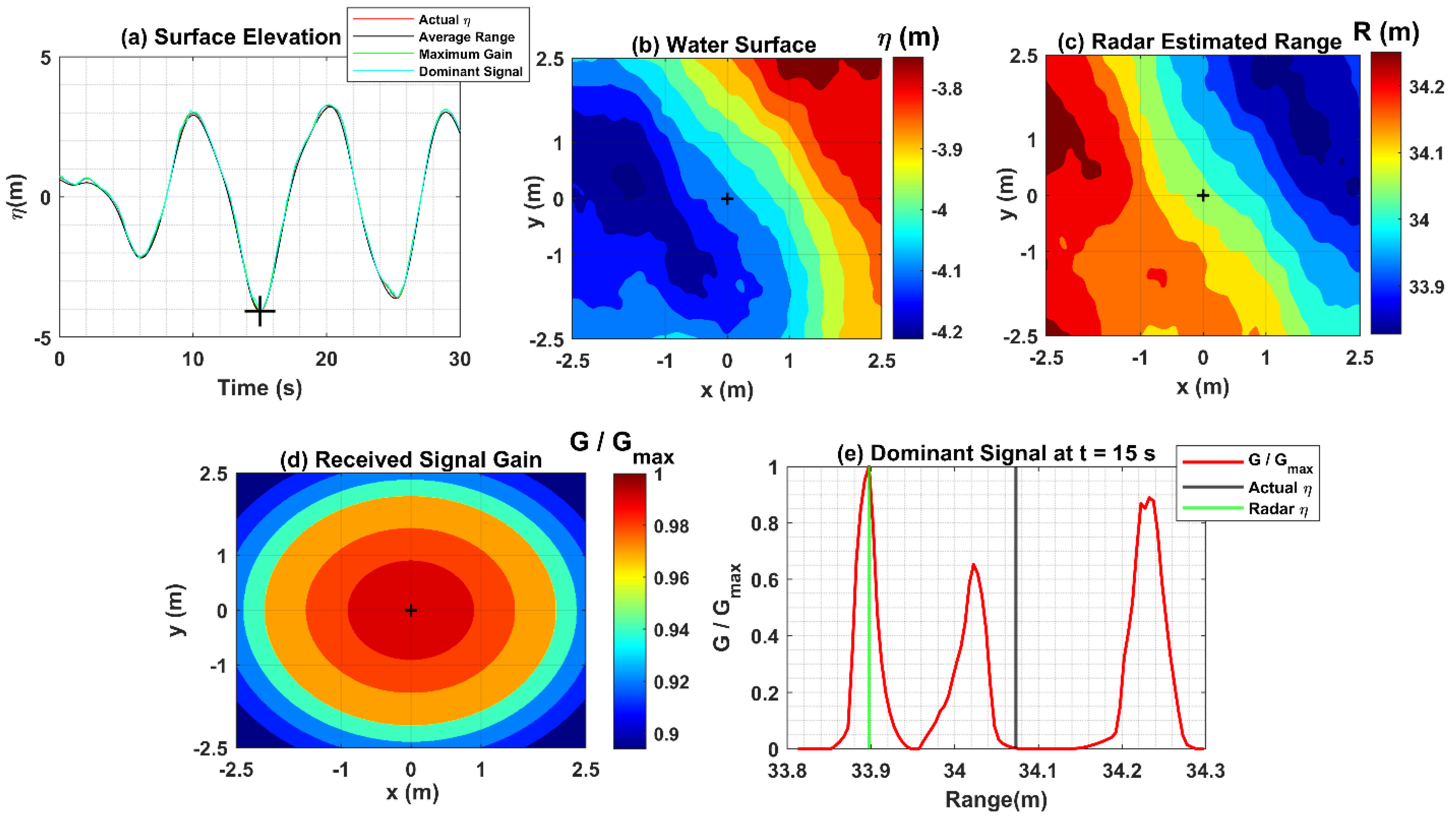
- The reflected signals at each time step are ordered in terms of range, and a cumulative sum of the gains is calculated. The cumulative sum is smoothed, and the density function is derived. The estimated surface elevation is associated with the maximum of the density function. We call this signal the dominant signal (dominant range).
- Additionally, we record the averaged signal, which is the mean of the ranges estimated at each time step.
- As discussed, we have gain values for each range at each time step. We record the signal associated with the maximum gain, which is called the maximum gain signal (not maximum of the density function).
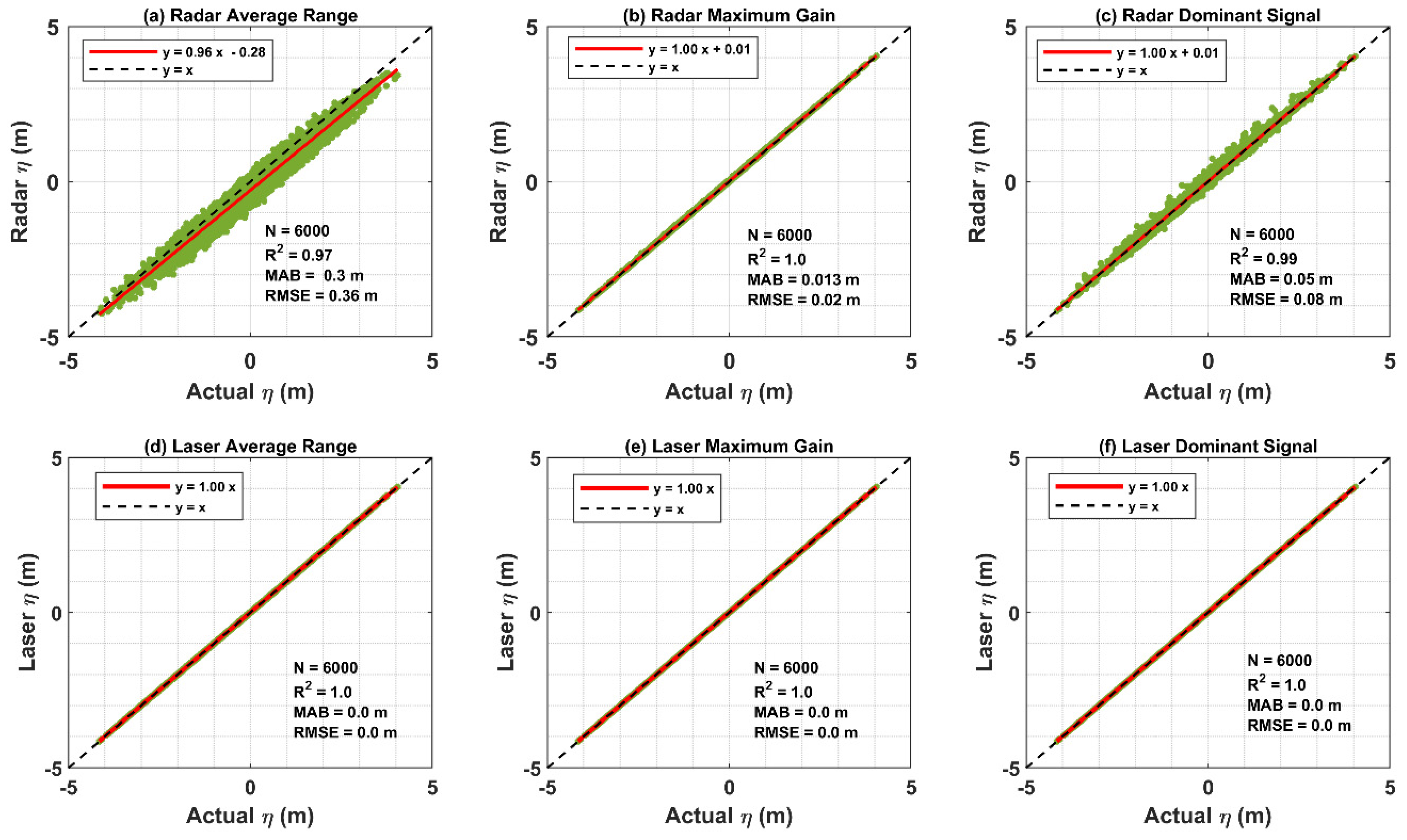
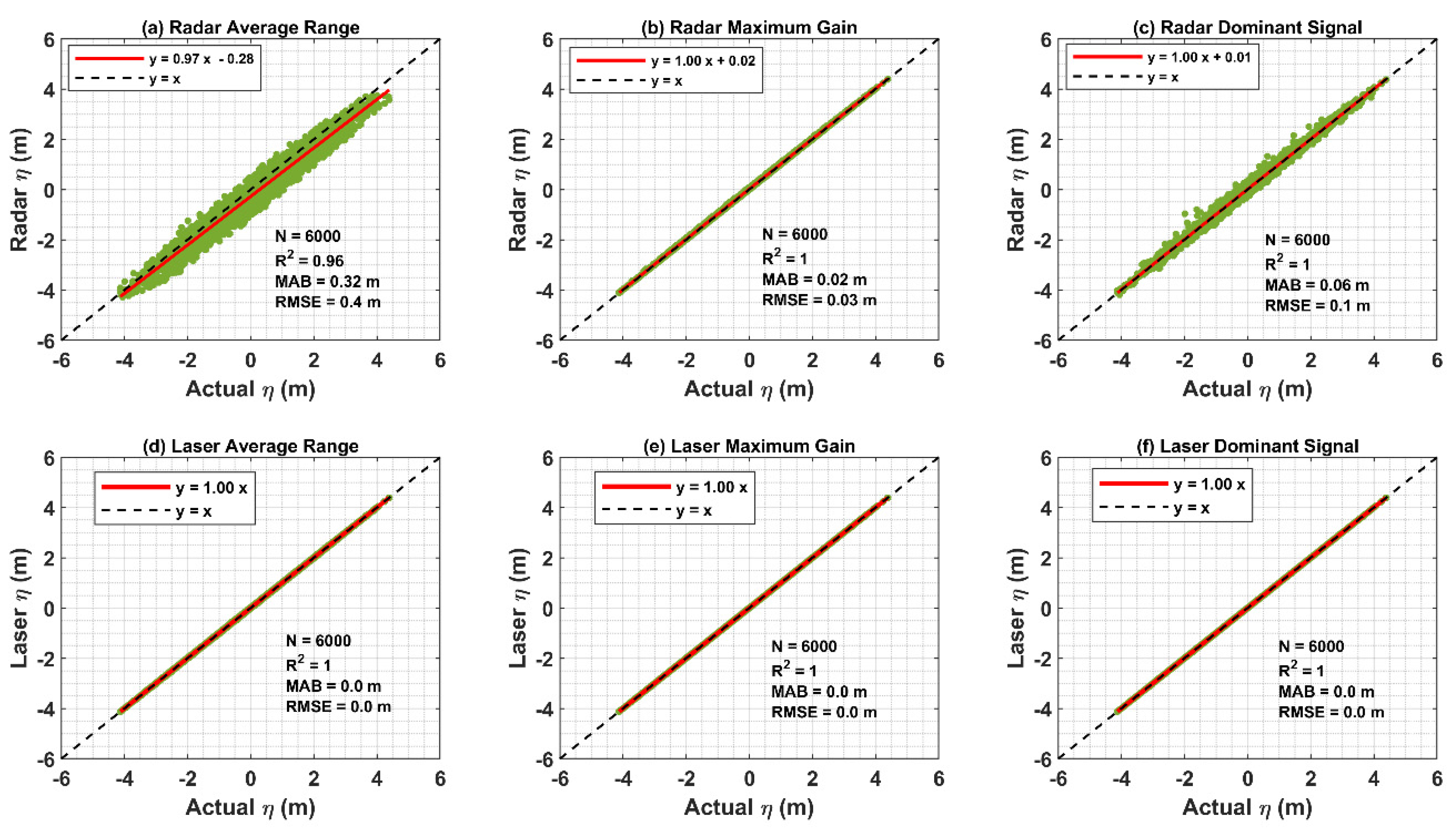
- We compare these simulated signal elevations with the actual surface elevations at the Radar and Laser locations of the water surface (0,0). The actual surface elevations are the time series of surface elevations produced from linear simulations at the positions of the instruments (0,0).
4. Results and Discussion
4.1. Actual Surface Elevation vs. Radar and Laser Simulation
4.1.1. High Sea State: = 5.2 m, = 0.10 Hz,
4.1.2. Low Sea State: = 1.1 m, = 0.22 Hz,
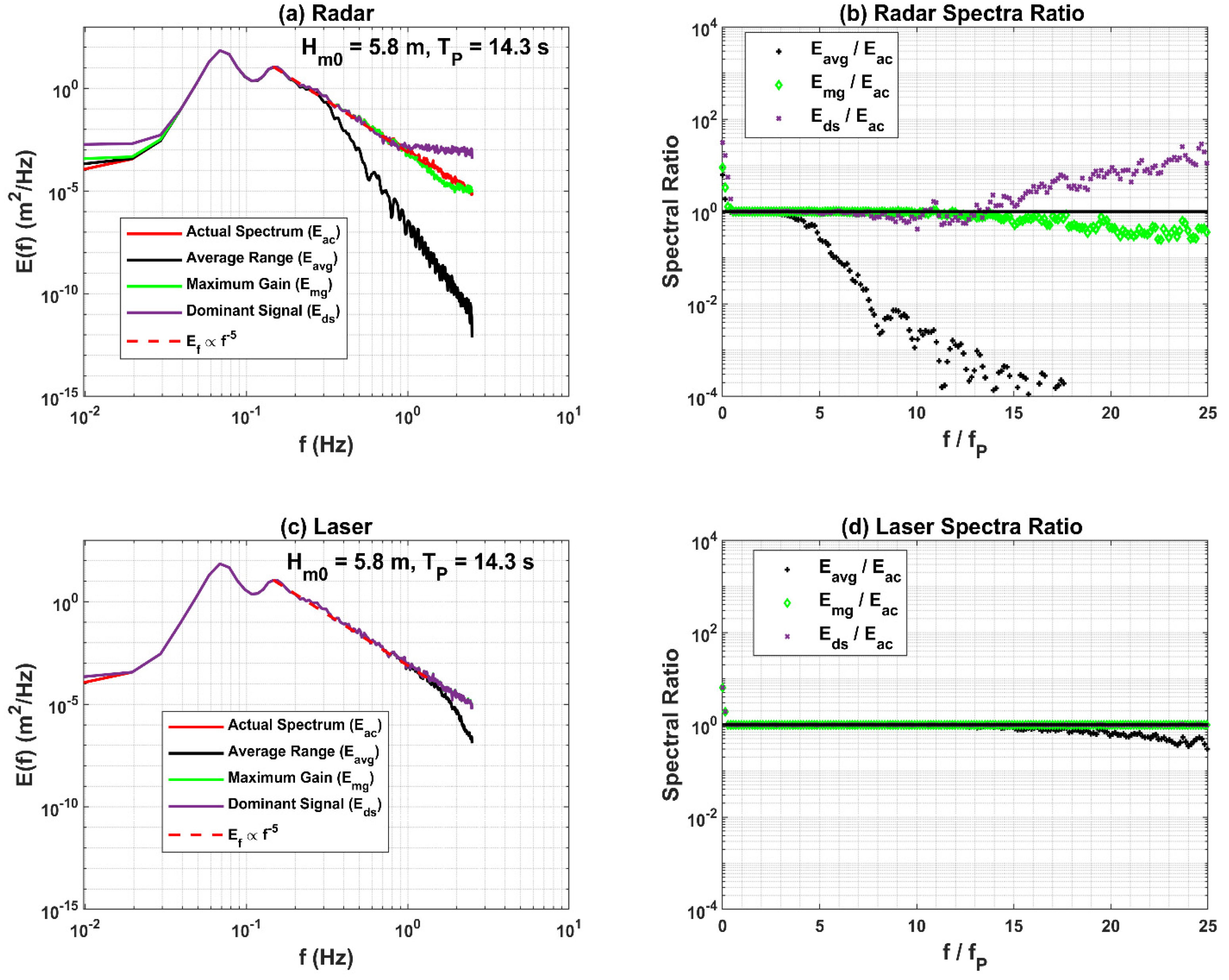
4.1.3. Swell: = 5.8 m, = 0.07 Hz,
4.2. Radar Dominant Signal at Specific Time Steps
4.2.1. Crest Elevations
4.2.2. Trough Depths
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Measuring Ocean Waves: Proceedings of a Symposium and Workshop on Wave Measurement Technology; The National Academies Press: Washington, DC, USA, 1982.
- Allender, J.; Audunson, T.; Barstow, S.F.; Bjerken, S.; Krogstad, H.E.; Steinbakke, P.; Vartdal, L.; Borgman, L.E.; Graham, C. The WADIC Project: A Comprehensive Field Evaluation of Directional Wave Instrumentation. Ocean. Eng. 1989, 16, 505–536. [Google Scholar] [CrossRef]
- Dysthe, K.; Krogstad, H.E.; Müller, P. Oceanic Rogue Waves. Annu. Rev. Fluid Mech. 2008, 40, 287–310. [Google Scholar] [CrossRef]
- Young, I.R. Directional Spectra of Hurricane Wind Waves. J. Geophys. Res. Oceans 2006, 111. [Google Scholar] [CrossRef]
- Young, I.R. On the Measurement of Directional Wave Spectra. Appl. Ocean Res. 1994, 16, 283–294. [Google Scholar] [CrossRef]
- Banner, M.L.; Young, I.R. Modeling Spectral Dissipation in the Evolution of Wind Waves. Part I: Assessment of Existing Model Performance. J. Phys. Oceanogr. 1994, 24, 1550–1571. [Google Scholar] [CrossRef]
- Young, I.R.; van Vledder, G.P. A Review of the Central Role of Nonlinear Interactions in Wind—Wave Evolution. Philos. Trans. R. Soc. London. Ser. A Phys. Eng. Sci. 1993, 342, 505–524. [Google Scholar]
- Young, I.R.; Verhagen, L.A.; Banner, M.L. A Note on the Bimodal Directional Spreading of Fetch-limited Wind Waves. J. Geophys. Res. Ocean 1995, 100, 773–778. [Google Scholar] [CrossRef]
- Young, I.R.; Zieger, S.; Babanin, A.V. Global Trends in Wind Speed and Wave Height. Science 2011, 332, 451–455. [Google Scholar] [CrossRef]
- Young, I.R.; Vinoth, J.; Zieger, S.; Babanin, A.V. Investigation of Trends in Extreme Value Wave Height and Wind Speed. J. Geophys. Res. Oceans 2012, 117. [Google Scholar] [CrossRef]
- Janssen, P.A.E.M.; Hansen, B.; Bidlot, J.-R. Verification of the ECMWF Wave Forecasting System against Buoy and Altimeter Data. Weather 1997, 12, 763–784. [Google Scholar] [CrossRef]
- Bidlot, J.-R.; Holmes, D.J.; Wittmann, P.A.; Lalbeharry, R.; Chen, H.S. Intercomparison of the Performance of Operational Ocean Wave Forecasting Systems with Buoy Data. Weather 2002, 17, 287–310. [Google Scholar] [CrossRef]
- Ewans, K.; Feld, G.; Jonathan, P. On Wave Radar Measurement. Ocean Dyn. 2014, 64, 1281–1303. [Google Scholar] [CrossRef]
- Christou, M.; Ewans, K. Examining a Comprehensive Dataset Containing Thousands of Freak Wave Events: Part 1—Description of the Data and Quality Control Procedure. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; Volume 44342, pp. 815–826. [Google Scholar]
- Barstow, S.F.; Krogstad, H.E. Procedures and Problems Associated with the Calibration of Wave Sensors. J. Eval. Comp. Calibration Oceanogr. Instrum. Proc. Int. Conf. (Ocean Data) 1985, 4, 55–82. [Google Scholar]
- Magnusson, A.K.; Jensen, R.; Swail, V. Spectral Shapes and Parameters from Three Different Wave Sensors. Ocean Dyn. 2021, 71, 893–909. [Google Scholar] [CrossRef]
- Hasselmann, D.E.; Dunckel, M.; Ewing, J.A. Directional Wave Spectra Observed during JONSWAP 1973. J. Phys. Oceanogr. 1980, 10, 1264–1280. [Google Scholar] [CrossRef]
- Pontes, M.T. Assessing the European Wave Energy Resource. ASME. J. Offshore Mech. Arct. Eng. 1998, 120, 226–231. [Google Scholar] [CrossRef]
- Fedele, F.; Arena, F. Long-Term Statistics and Extreme Waves of Sea Storms. J. Phys. Oceanogr. 2010, 40, 1106–1117. [Google Scholar] [CrossRef]
- Lenee-Bluhm, P.; Paasch, R.; Özkan-Haller, H.T. Characterizing the Wave Energy Resource of the US Pacific Northwest. Renew. Energy 2011, 36, 2106–2119. [Google Scholar] [CrossRef]
- Tucker, M.J.; Pitt, E.G. Waves in Ocean Engineering; The National Academies of Sciences, Engineering, and Medicine: Washington, DC, USA, 2001; ISBN 0080435661. [Google Scholar]
- Gronlie, O. Wave Radars-a Comparison of Concepts and Techniques. Hydro Int. 2004, 8, 24–27. [Google Scholar]
- Jangir, P.K.; Ewans, K.; Young, I.R. Comparative Performance of Radar, Laser, and Waverider Buoy measurements of ocean waves—Part 1: Frequency domain Analysis. J. Atmos. Ocean. Technol. 2022; submitted. [Google Scholar]
- Jangir, P.K.; Ewans, K.; Young, I.R. Comparative Performance of Radar, Laser, and Waverider Buoy measurements of ocean waves—Part 2: Time domain Analysis. J. Atmos. Ocean. Technol. 2022; submitted. [Google Scholar]
- Noreika, S.; Beardsley, M.; Lodder, L.; Brown, S.; Duncalf, D. Comparison of Contemporaneous Wave Measurements with a Rosemount Waveradar REX and a Datawell Directional Waverider Buoy. In Proceedings of the 12th International Workshop on Wave Hindcasting and Forecasting & 3rd Coastal Hazard Symposium, Kohala Coast, HI, USA, 30 October–4 November 2011. [Google Scholar]
- Krogstad, H.E.; Wolf, J.; Thompson, S.P.; Wyatt, L.R. Methods for Intercomparison of Wave Measurements. Coast. Eng. 1999, 37, 235–257. [Google Scholar] [CrossRef]
- Forristall, G.Z.; Barstow, S.F.; Krogstad, H.E.; Prevosto, M.; Taylor, P.H.; Tromans, P.S. Wave Crest Sensor Intercomparison Study: An Overview of WACSIS. J. Offshore Mech. Arct. Eng. 2004, 126, 26–34. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S. On the Skewness of Sea-Surface Slopes. J. Phys. Oceanogr. 1982, 12, 1283–1291. [Google Scholar] [CrossRef]
- James, I.D. A Note on the Theoretical Comparison of Wave Staffs and Wave Rider Buoys in Steep Gravity Waves. Ocean Eng. 1986, 13, 209–214. [Google Scholar] [CrossRef]
- Srokosz, M.A.; Longuet-Higgins, M.S. On the Skewness of Sea-Surface Elevation. J. Fluid Mech. 1986, 164, 487–497. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.S. Eulerian and Lagrangian Aspects of Surface Waves. J. Fluid Mech. 1986, 173, 683–707. [Google Scholar] [CrossRef]
- Forristall, G.Z. Wave Crest Distributions: Observations and Second-Order Theory. J. Phys. Oceanogr. 2000, 30, 1931–1943. [Google Scholar] [CrossRef]
- Marthinsen, T.; Winterstein, S.R. On the Skewness of Random Surface Waves. In Proceedings of the Second International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 14–19 June 1992. [Google Scholar]
- Prevosto, M.; Krogstad, H.E.; Robin, A. Probability Distributions for Maximum Wave and Crest Heights. Coast. Eng. 2000, 40, 329–360. [Google Scholar] [CrossRef]
- McAllister, M.L.; van den Bremer, T.S. Lagrangian Measurement of Steep Directionally Spread Ocean Waves: Second-Order Motion of a Wave-Following Measurement Buoy. J. Phys. Oceanogr. 2019, 49, 3087–3108. [Google Scholar] [CrossRef]
- Herbers, T.H.C.; Janssen, T.T. Lagrangian Surface Wave Motion and Stokes Drift Fluctuations. J. Phys. Oceanogr. 2016, 46, 1009–1021. [Google Scholar] [CrossRef]
- Herbers, T.H.C.; Elgar, S.; Guza, R.T. Infragravity-Frequency (0.005–0.05 Hz) Motions on the Shelf. Part I: Forced Waves. J. Phys. Oceanogr. 1994, 24, 917–927. [Google Scholar] [CrossRef]
- Herbers, T.H.C.; Jessen, P.F.; Janssen, T.T.; Colbert, D.B.; MacMahan, J.H. Observing Ocean Surface Waves with GPS-Tracked Buoys. J. Atmos. Ocean. Technol. 2012, 29, 944–959. [Google Scholar] [CrossRef]
- Aqua-Ltd. WaveRadar REX Operating and Installation Manual—Issue K1; Rosemount WaveRadar Manual, RS Aqua Ltd.: Scotland, UK, 2014. [Google Scholar]
- Optech. Sentinal 3100 User Manual DV and CP Models. Available online: https://vdocuments.net/sentinel-3100-user-manual-dv-and-cp-manualsoptech-sentinel-3100-user-manual.html?page=1 (accessed on 17 July 2022).
- Ewans, K.C. Observations of the Directional Spectrum of Fetch-Limited Waves. J. Phys. Oceanogr. 1998, 28, 495–512. [Google Scholar] [CrossRef]
- Ewans, K.C.; Bitner-Gregersen, E.M.; Soares, C.G. Estimation of Wind-Sea and Swell Components in a Bimodal Sea State. J. Offshore Mech. Arct. Eng. 2006, 128, 265–270. [Google Scholar] [CrossRef]
- Sanjeev, J.K. Lambertian Reflectance. In Computer Vision: A Reference Guide; Ikeuchi, K., Ed.; Springer: Boston, MA, USA, 2014; pp. 441–443. [Google Scholar]
- Welch, P. The Use of Fast Fourier Transform for the Estimation of Power Spectra: A Method Based on Time Averaging over Short, Modified Periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef] [Green Version]
- Donelan, M.A.; Hamilton, J.; Hui Mathematical, W.S.A.; Sciences, P. Directional Spectra of Wind-Generated Ocean Waves. Ser. A Math. Phys. Sci. 1985, 315, 509–562. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jangir, P.K.; Ewans, K.C.; Young, I.R. On the Functionality of Radar and Laser Ocean Wave Sensors. J. Mar. Sci. Eng. 2022, 10, 1260. https://doi.org/10.3390/jmse10091260
Jangir PK, Ewans KC, Young IR. On the Functionality of Radar and Laser Ocean Wave Sensors. Journal of Marine Science and Engineering. 2022; 10(9):1260. https://doi.org/10.3390/jmse10091260
Chicago/Turabian StyleJangir, Pramod Kumar, Kevin C. Ewans, and Ian R. Young. 2022. "On the Functionality of Radar and Laser Ocean Wave Sensors" Journal of Marine Science and Engineering 10, no. 9: 1260. https://doi.org/10.3390/jmse10091260
APA StyleJangir, P. K., Ewans, K. C., & Young, I. R. (2022). On the Functionality of Radar and Laser Ocean Wave Sensors. Journal of Marine Science and Engineering, 10(9), 1260. https://doi.org/10.3390/jmse10091260