
Research on Multi-Ship Target Detection and Tracking Method Based on Camera in Complex Scenes


Abstract
:1. Introduction
2. Target Detection
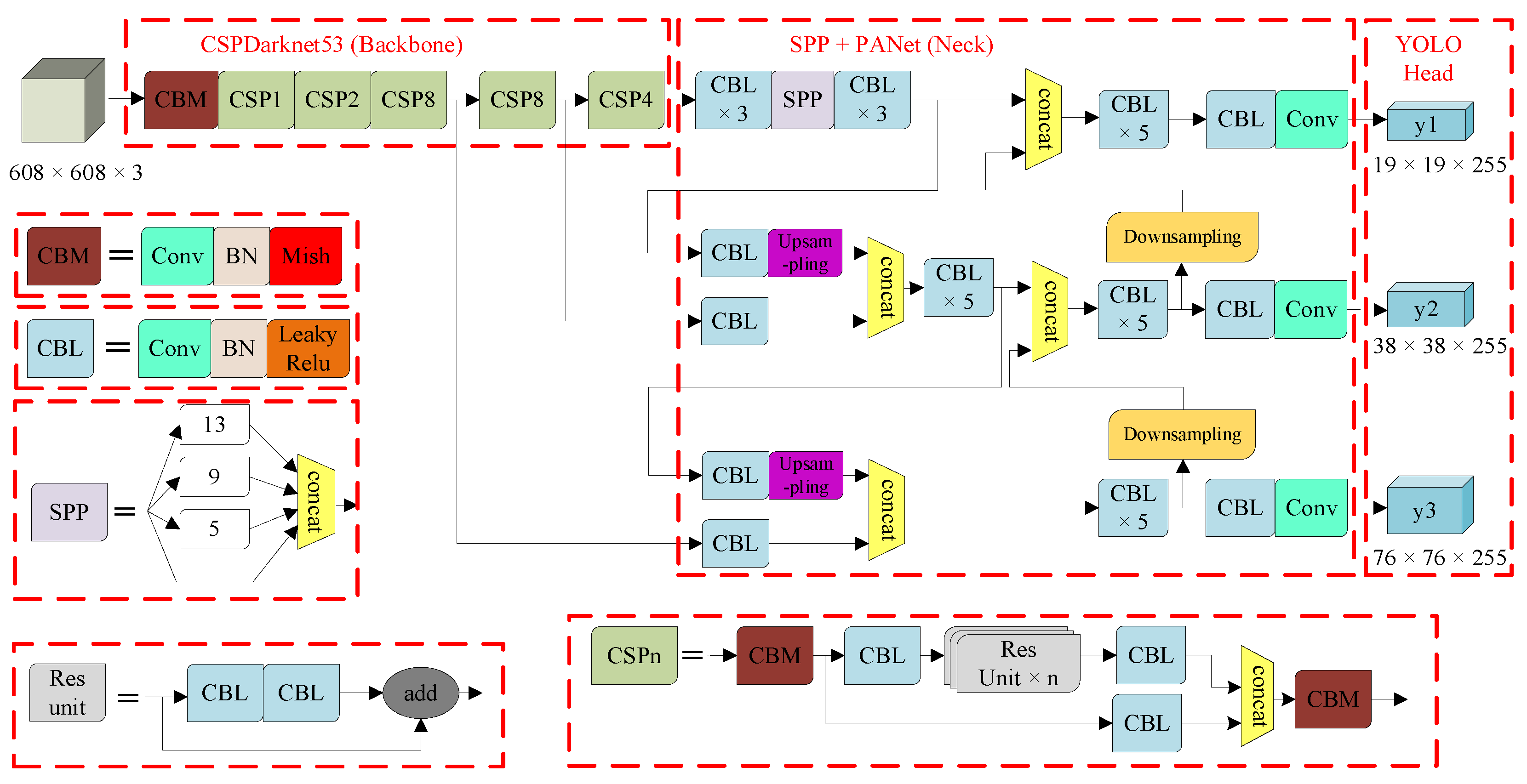
2.1. Target Detection Based on YOLOv4 Algorithm
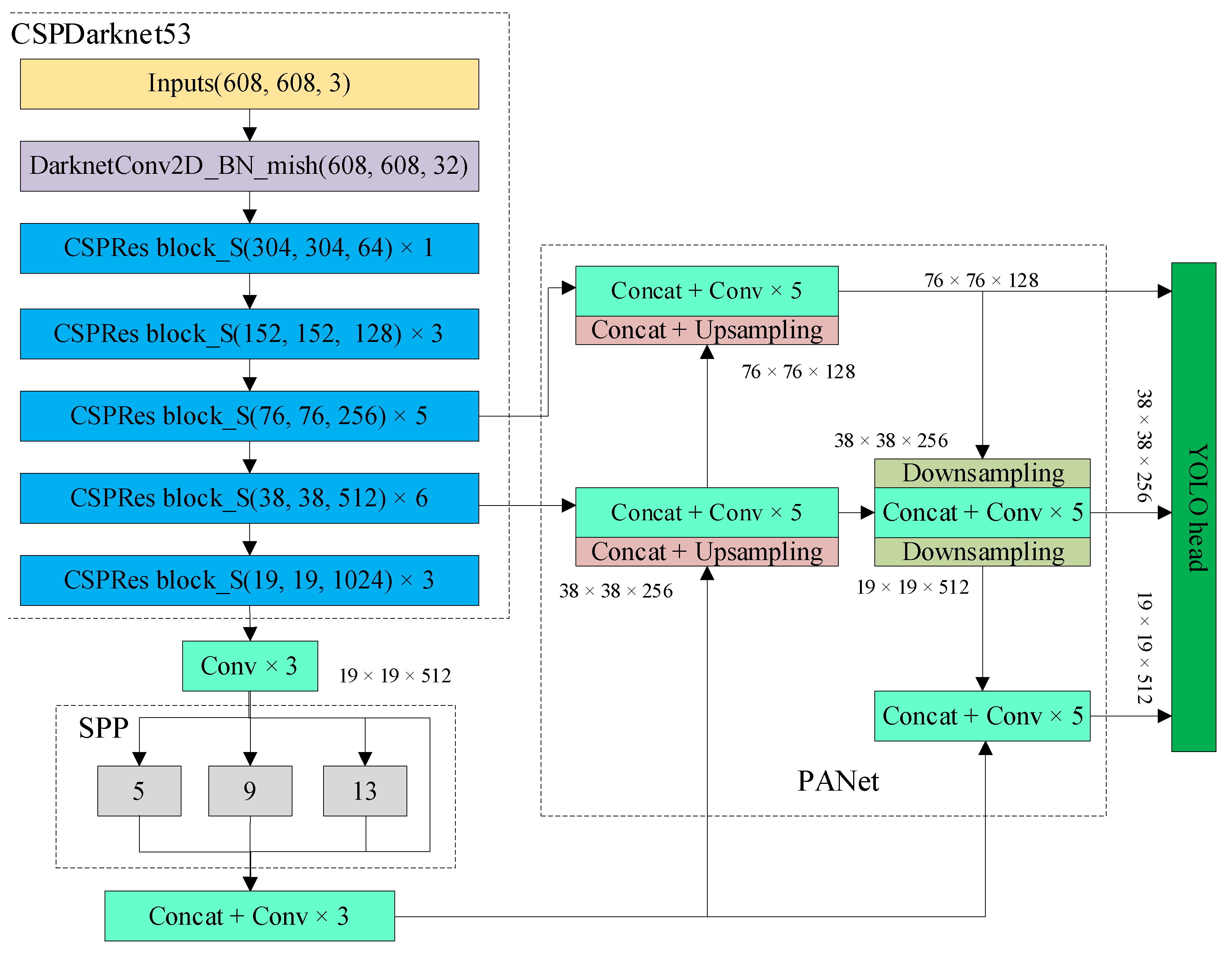
2.2. YOLOv4 Algorithm Improvement
3. Target Tracking
3.1. Target Tracking Method
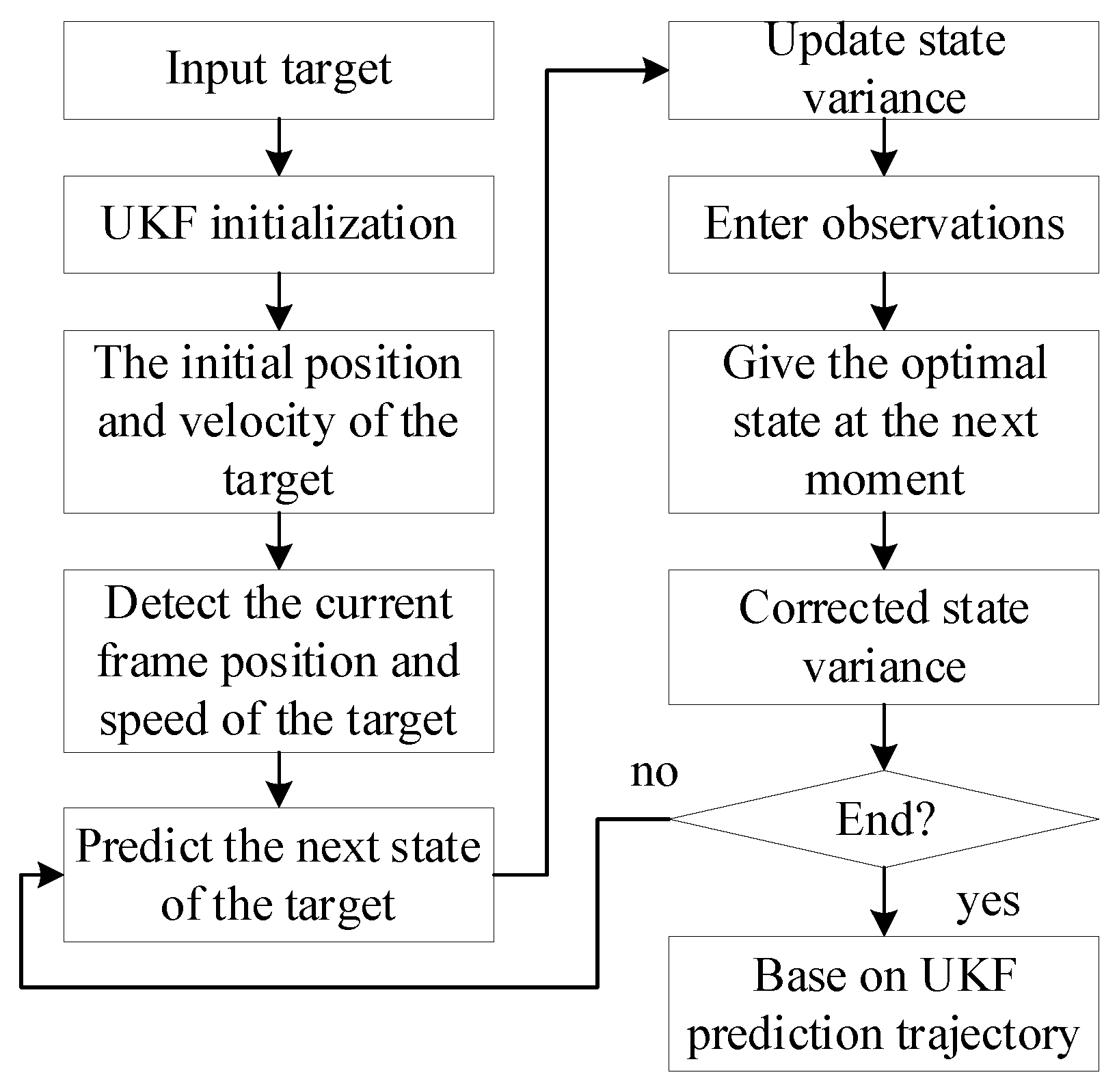
3.2. Target Tracking Based on UKF Algorithm
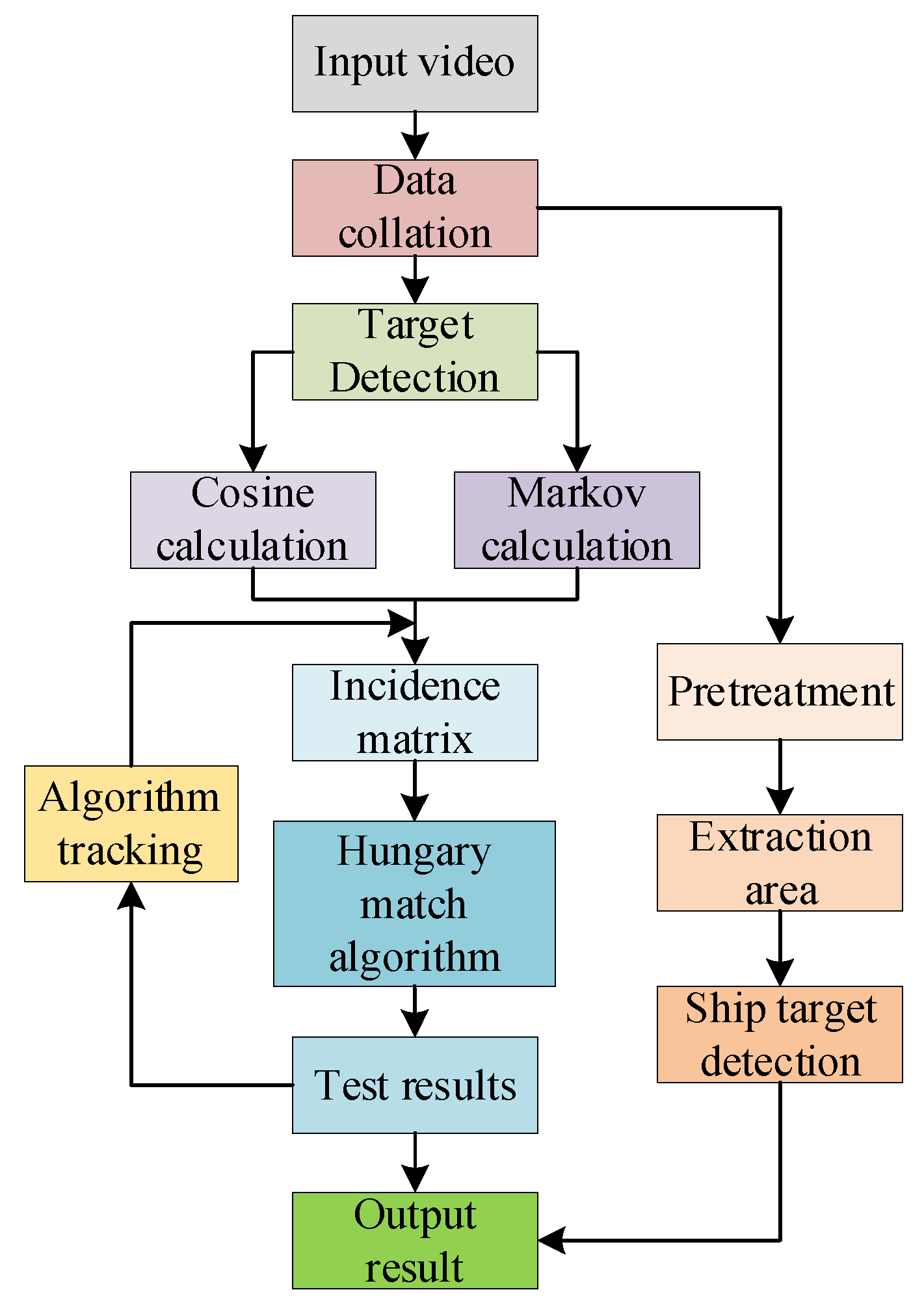
3.3. Fusion Method of Improved YOLOv4 and UKF Algorithm
4. Experiment and Analysis
4.1. Dataset and Parameter Settings
4.2. Experimental Environment
4.3. Target Detection Results
4.3.1. Target Detection with Large Difference in Ship Size
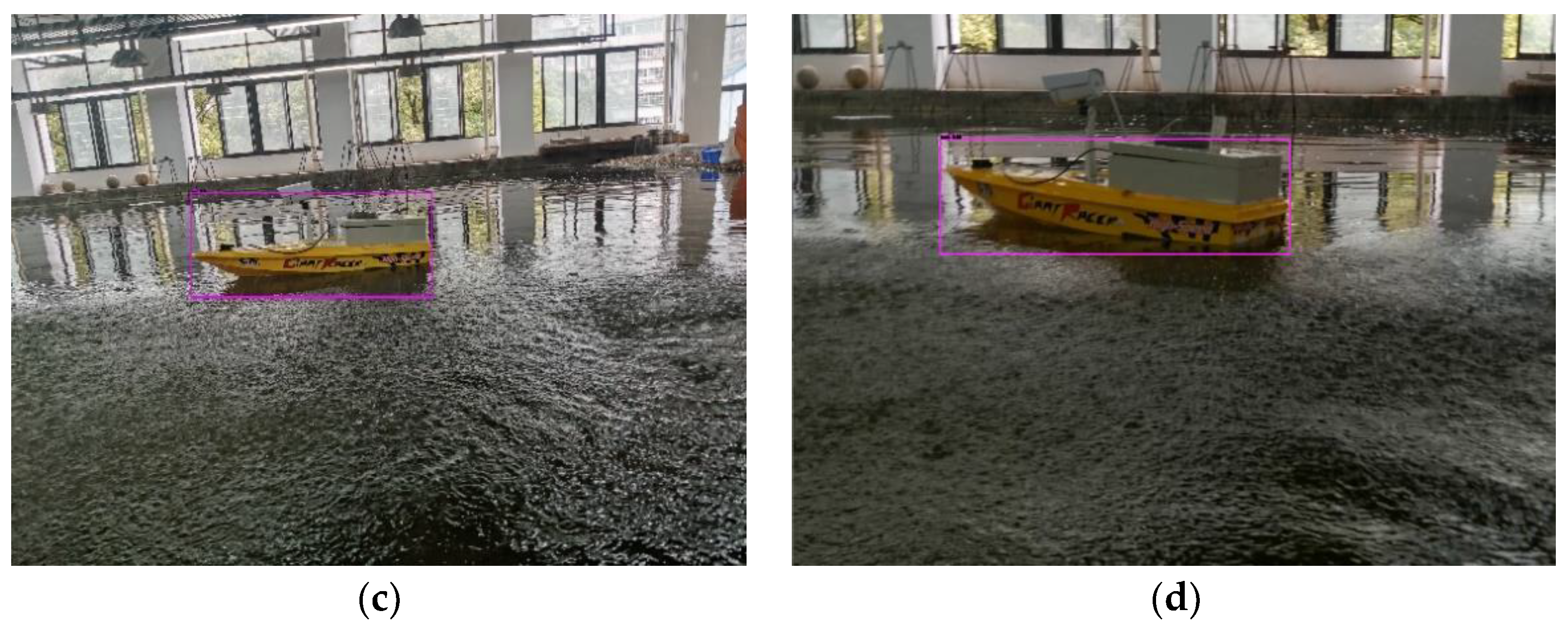
4.3.2. Target Detection with Background Interference
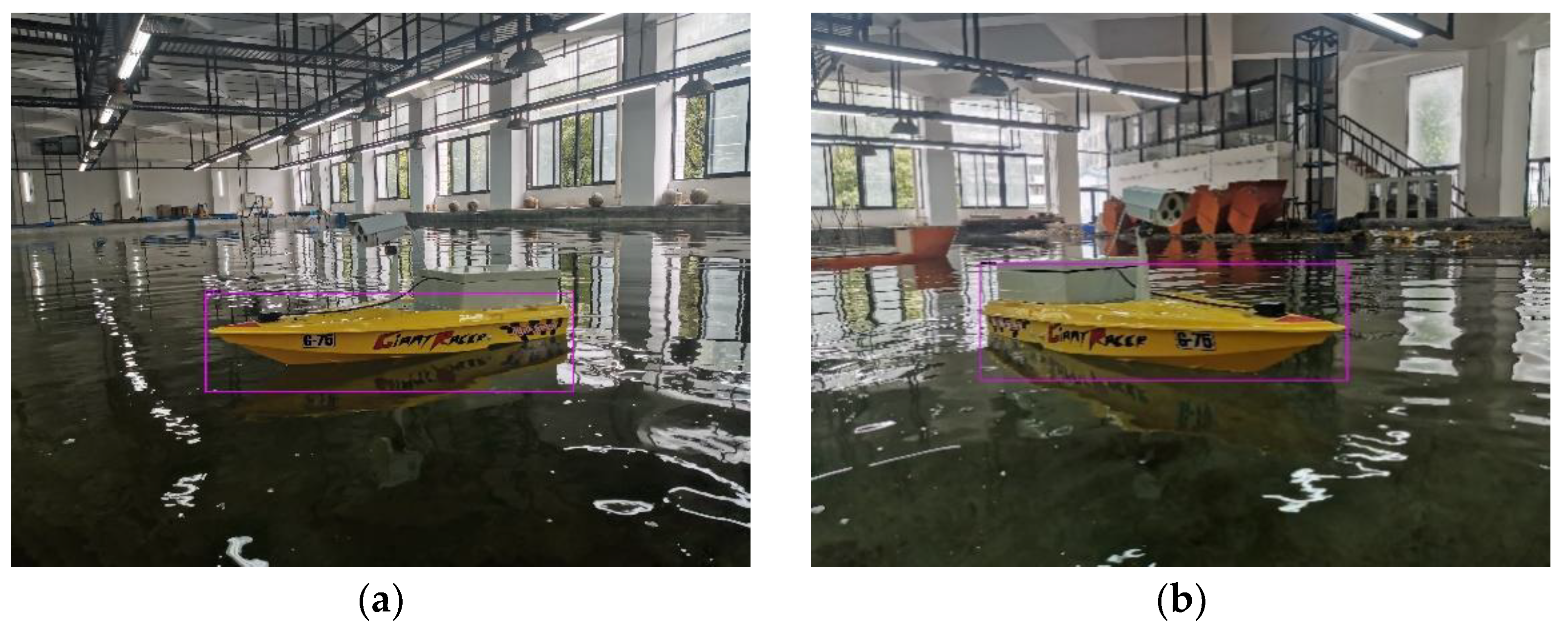
4.3.3. Target Detection of Tilted Images
4.3.4. Evaluation of Results
4.4. Target Tracking Results
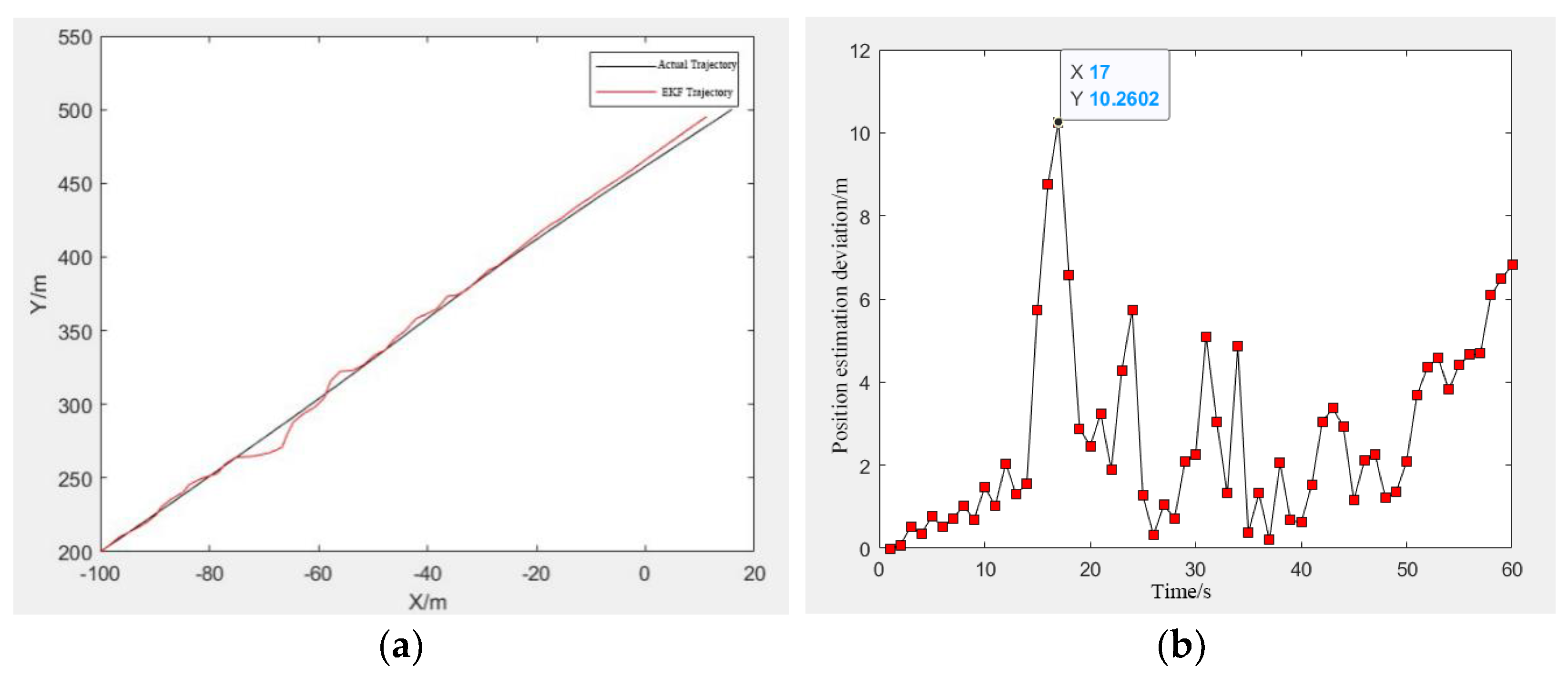
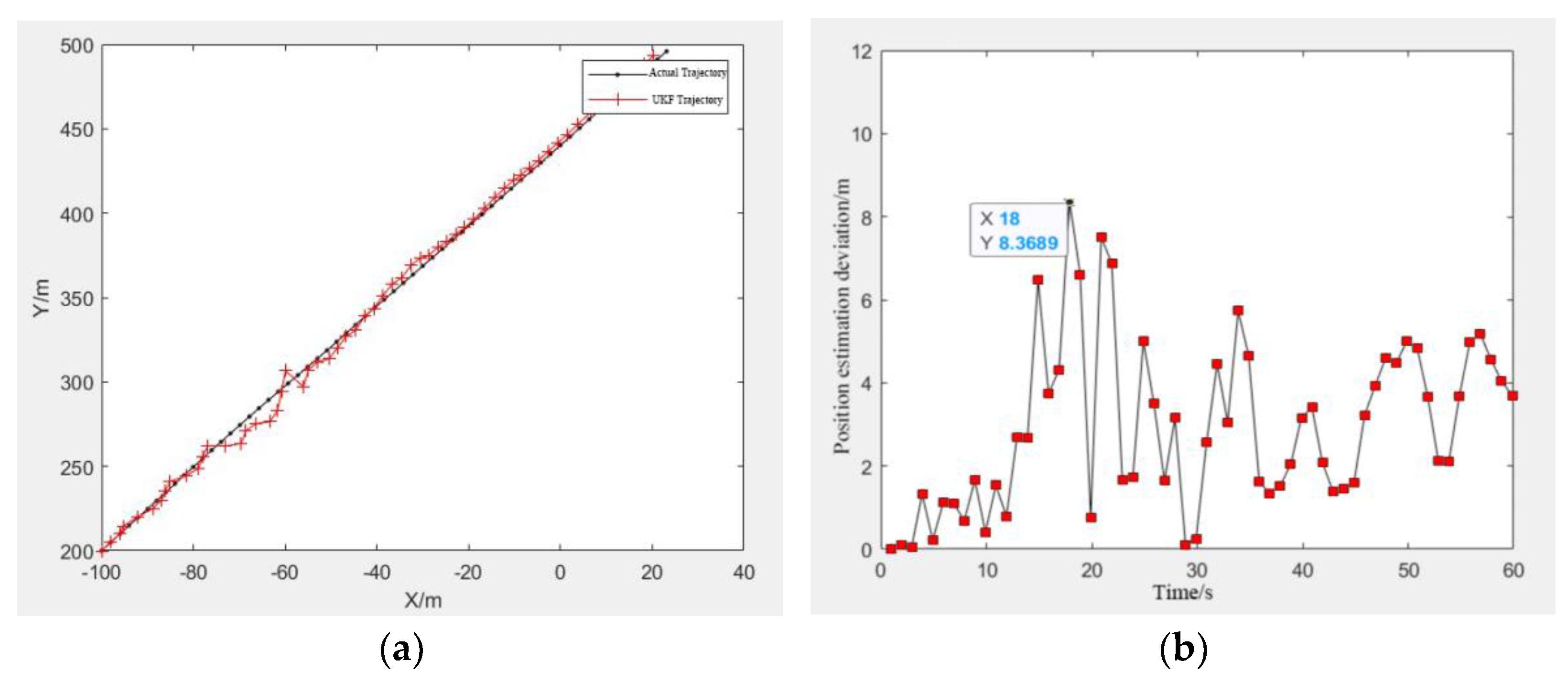
4.4.1. Target Tracking Comparison of EKF and UKF Algorithm
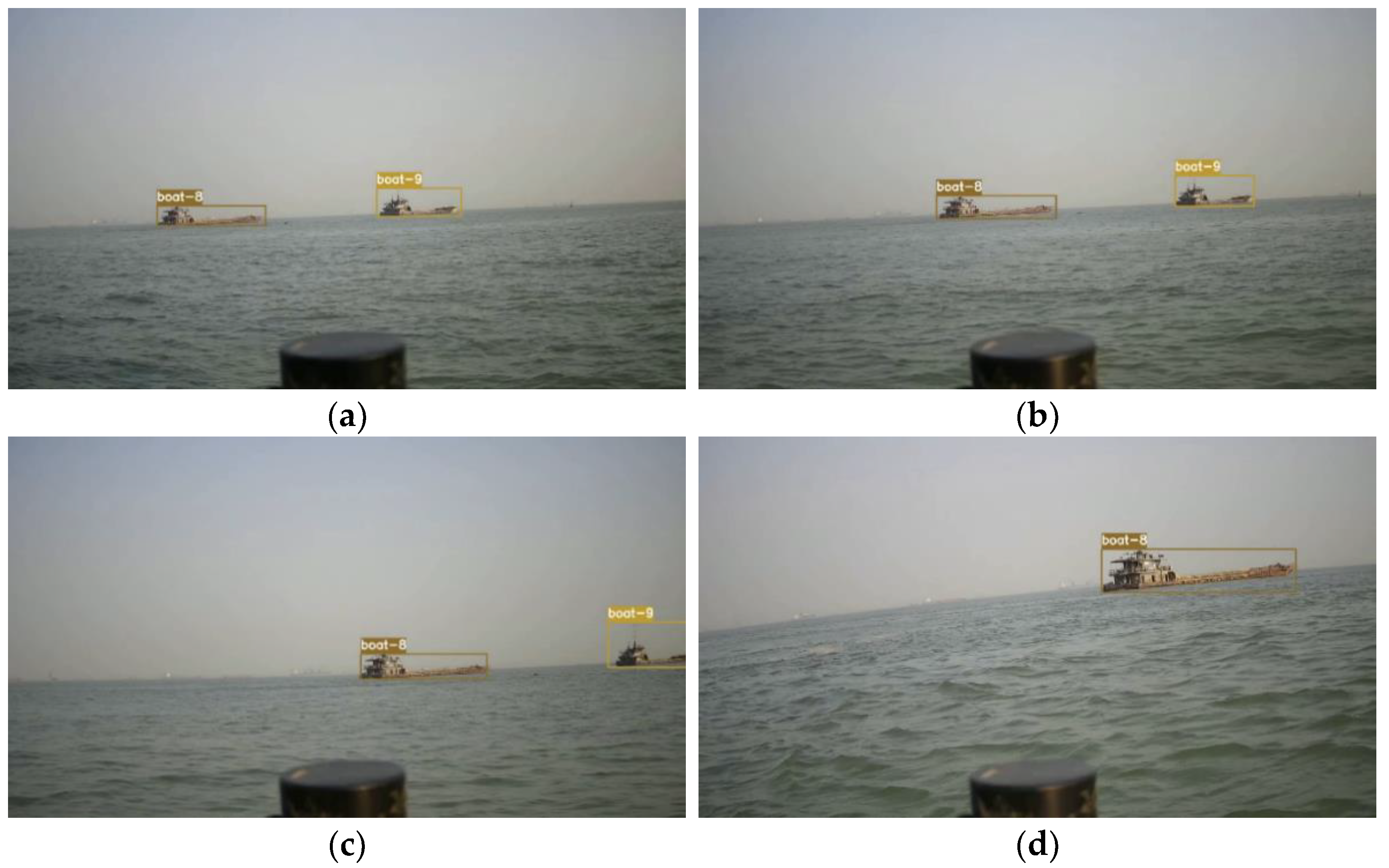
4.4.2. Target Detection and Tracking of Improved YOLOv4 and UKF Algorithm
4.4.3. Evaluation of Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Puisa, R.; Lin, L.; Bolbot, V.; Vassalos, D. Unravelling causal factors of maritime incidents and accidents. Saf. Sci. 2018, 110, 124–141. [Google Scholar] [CrossRef] [Green Version]
- Goerlandt, F.; Kujala, P. Traffic simulation based ship collision probability modeling. Reliab. Eng. Syst. Saf. 2011, 96, 91–107. [Google Scholar] [CrossRef]
- Antão, P.; Guedes Soares, C. Fault-tree models of accident scenarios of RoPax vessels. Int. J. Autom. Comput. 2006, 3, 107–116. [Google Scholar] [CrossRef]
- Ernestos, T. Human element and accidents in Greek shipping. J. Navig. 2010, 63, 119–127. [Google Scholar]
- Weng, J.; Liao, S.; Wu, B.; Yang, D. Exploring effects of ship traffic characteristics and environmental conditions on ship collision frequency. Marit. Policy Manag. 2020, 47, 523–543. [Google Scholar] [CrossRef]
- Kim, D.J.; Kwak, S.Y. Evaluation of human factors in ship accidents in the domestic sea. J. Ergon. Soc. Korea 2011, 30, 87–98. [Google Scholar] [CrossRef] [Green Version]
- Shi, J.; Liu, Z. Track Pairs Collision Detection with Applications to Ship Collision Risk Assessment. J. Mar. Sci. Eng. 2022, 10, 216. [Google Scholar] [CrossRef]
- Perera, L.P.; Ferrari, V.; Santos, F.P.; Hinostroza, M.A.; Guedes Soares, C. Experimental evaluations on ship autonomous navigation and collision avoidance by intelligent guidance. IEEE J. Ocean. Eng. 2015, 40, 374–387. [Google Scholar] [CrossRef]
- Statheros, T.; Howells, G.; Maier, K.M. Autonomous ship collision avoidance navigation concepts, technologies and techniques. J. Navig. 2008, 61, 129–142. [Google Scholar] [CrossRef] [Green Version]
- Felski, A.; Zwolak, K. The ocean-going autonomous ship-Challenges and threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef] [Green Version]
- Levander, O. Autonomous ships on the high seas. IEEE Spectr. 2017, 54, 26–31. [Google Scholar] [CrossRef]
- Chen, Y.; Hong, X.; Chen, W.; Wang, H.; Fan, T. Experimental Research on Overwater and Underwater Visual Image Stitching and Fusion Technology of Offshore Operation and Maintenance of Unmanned Ship. J. Mar. Sci. Eng. 2022, 10, 747. [Google Scholar] [CrossRef]
- Bhanu, B. Automatic target recognition: State of the art survey. IEEE Trans. Aerosp. Electron. Syst. 1986, 22, 364–379. [Google Scholar] [CrossRef]
- Johansen, T.A.; Perez, T.; Cristofaro, A. Ship collision avoidance and COLREGS compliance using simulation-based control behavior selection with predictive hazard assessment. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3407–3422. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Li, B.; Tian, L.F.; Chao, D. Automatic detection and tracking of ship based on mean shift in corrected video sequences. In Proceedings of the ICIVC 2017: 2nd International Conference on Image, Vision and Computing, Chengdu, China, 2–4 June 2017. [Google Scholar]
- Bao, X.; Javanbakhti, S.; Zinger, S.; Wijnhoven, R.; De With, P.H.N. Context modeling combined with motion analysis for moving ship detection in port surveillance. J. Electron. Imaging 2013, 22, 041114. [Google Scholar] [CrossRef] [Green Version]
- Bloisi, D.D.; Pennisi, A.; Iocchi, L. Background modeling in the maritime domain. Mach. Vision Appl. 2014, 25, 1257–1269. [Google Scholar] [CrossRef]
- Saghafi, M.; Javadein, S.; Noorhossein, S.; Khalili, H. Robust ship detection and tracking using modified ViBe and backwash cancellation algorithm. In Proceedings of the CIIT 2012: 2nd International Conference on Computational Intelligence and Information Technology, Chennai, India, 3–4 December 2012. [Google Scholar]
- Nie, S.; Jiang, Z.; Zhang, H.; Cai, B.; Yao, Y. Inshore ship detection based on mask R-CNN. In Proceedings of the IGARSS 2018: International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018. [Google Scholar]
- Wang, X.; Liu, J.; Liu, X.; Liu, Z.; Khalaf, O.I.; Ji, J.; Ouyang, Q. Ship feature recognition methods for deep learning in complex marine environments. Complex Intell. Syst. 2022, 8, 1–17. [Google Scholar] [CrossRef]
- Feng, H.; Guo, J.; Xu, H.; Ge, S.S. SharpGAN: Dynamic Scene Deblurring Method for Smart Ship Based on Receptive Field Block and Generative Adversarial Networks. Sensors 2021, 21, 3641. [Google Scholar] [CrossRef]
- Chen, P.; Li, Y.; Zhou, H.; Liu, B.; Liu, P. Detection of Small Ship Objects Using Anchor Boxes Cluster and Feature Pyramid Network Model for SAR Imagery. J. Mar. Sci. Eng. 2020, 8, 112. [Google Scholar] [CrossRef] [Green Version]
- Fu, H.; Song, G.; Wang, Y. Improved YOLOv4 Marine Target Detection Combined with CBAM. Symmetry 2021, 13, 623. [Google Scholar] [CrossRef]
- Bouma, H.; De Lange, D.J.J.; Van Den Broek, S.P.; Kemp, R.A.W.; Schwering, P.B.W. Automatic detection of small surface targets with electro-optical sensors in a harbor environment. In Proceedings of the SPIE 2008: The International Society for Optical Engineering, Cardiff, Wales, UK, 15–16 September 2008. [Google Scholar]
- Williams, D.P. Fast target detection in synthetic aperture sonar imagery: A new algorithm and large-scale performance analysis. IEEE J. Ocean. Eng. 2015, 40, 71–92. [Google Scholar] [CrossRef]
- Berus, L.; Skakun, P.; Rajnovic, D.; Janjatovic, P.; Sidjanin, L.; Ficko, M. Determination of the Grain Size in Single-Phase Materials by Edge Detection and Concatenation. Metals 2020, 10, 1381. [Google Scholar] [CrossRef]
- Wu, M.; Sun, J. Extended Kalman Filter Based Moving Object Tracking by Mobile Robot in Unknown Environment. Robot 2010, 32, 334–343. [Google Scholar] [CrossRef]
- Grachev, A.N.; Kurbatsky, S.A.; Khomyakov, A.V. Algorithm of Low-Flying Target Tracking in Monopulse Radar Stations Based on an Unscented Kalman Filter. J. Commun. Technol. Electron. 2021, 66, 149–154. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, L.; Han, X.; Pan, M. Lightweight Ship Detection Methods Based on YOLOv3 and DenseNet. Math. Probl. Eng. 2020, 2020, 4813183. [Google Scholar] [CrossRef]
- Li, A.; Yu, L.; Tian, S. Underwater Biological Detection Based on YOLOv4 Combined with Channel Attention. J. Mar. Sci. Eng. 2022, 10, 469. [Google Scholar] [CrossRef]
- Qiao, D.; Liu, G.; Zhang, J.; Zhang, Q.; Wu, G.; Dong, F. M3C: Multimodel-and-Multicue-Based Tracking by Detection of Surrounding Vessels in Maritime Environment for USV. Electronics 2019, 8, 723. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | AP | FPS |
|---|---|---|
| YOLOv3 | 0.940 | 13.5 |
| YOLOv3-tiny | 0.881 | 27.5 |
| LSDM-tiny | 0.935 | 27.1 |
| YOLOv4 (combined with channel attention) | 0.976 | 15 |
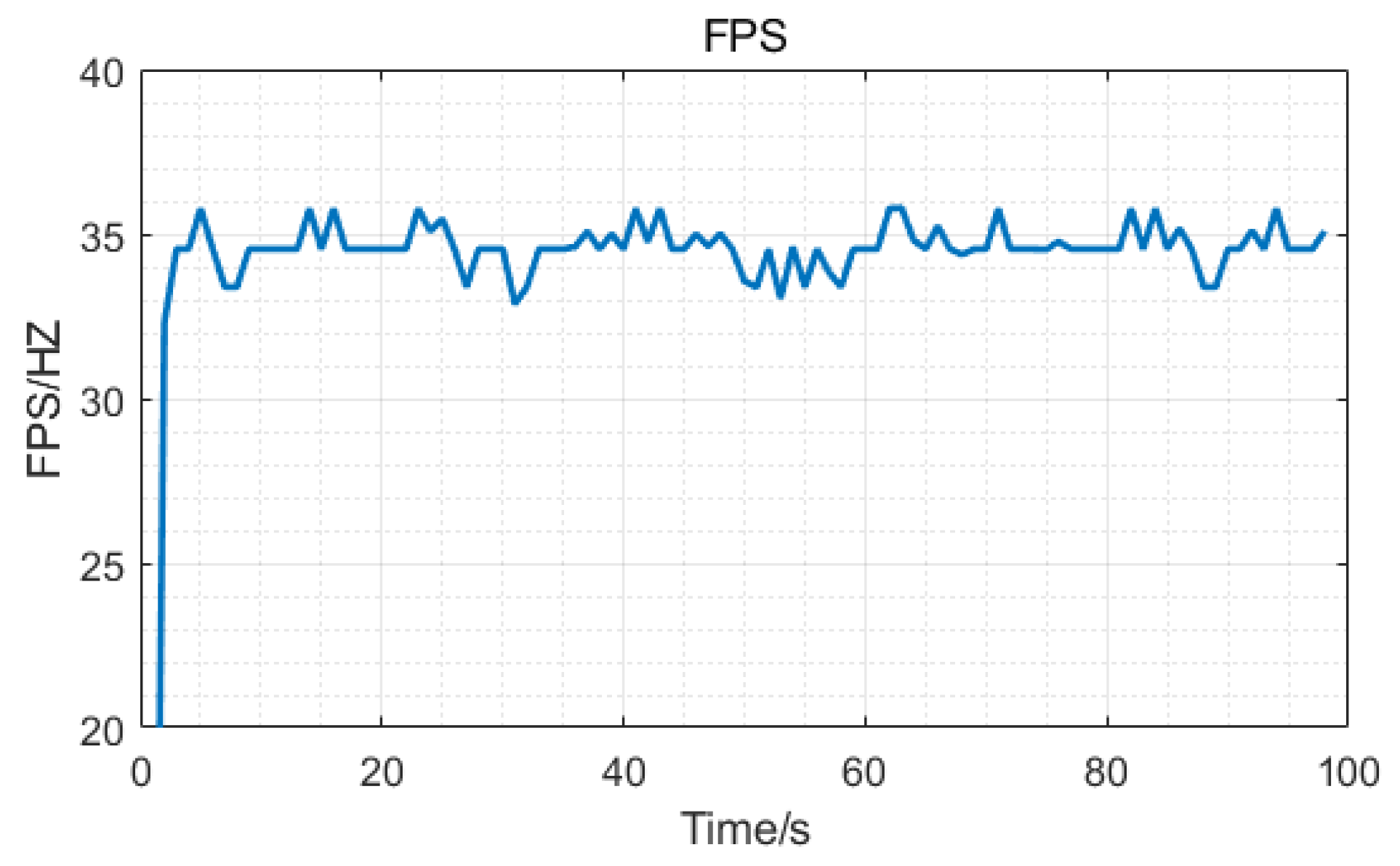
| Ours | 0.945 | 34.5 |
| Algorithms | MOTA (%) | MOTP (%) |
|---|---|---|
| KCF | 70.3 | 80.2 |
| SORT | 59.8 | 79.6 |
| M3C | 72.8 | 80.4 |
| Ours | 76.4 | 80.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, X.; Cui, B.; Chen, W.; Rao, Y.; Chen, Y. Research on Multi-Ship Target Detection and Tracking Method Based on Camera in Complex Scenes. J. Mar. Sci. Eng. 2022, 10, 978. https://doi.org/10.3390/jmse10070978
Hong X, Cui B, Chen W, Rao Y, Chen Y. Research on Multi-Ship Target Detection and Tracking Method Based on Camera in Complex Scenes. Journal of Marine Science and Engineering. 2022; 10(7):978. https://doi.org/10.3390/jmse10070978
Chicago/Turabian StyleHong, Xiaobin, Bin Cui, Weiguo Chen, Yinhui Rao, and Yuanming Chen. 2022. "Research on Multi-Ship Target Detection and Tracking Method Based on Camera in Complex Scenes" Journal of Marine Science and Engineering 10, no. 7: 978. https://doi.org/10.3390/jmse10070978
APA StyleHong, X., Cui, B., Chen, W., Rao, Y., & Chen, Y. (2022). Research on Multi-Ship Target Detection and Tracking Method Based on Camera in Complex Scenes. Journal of Marine Science and Engineering, 10(7), 978. https://doi.org/10.3390/jmse10070978