
Ship Dynamic Positioning Control Based on Active Disturbance Rejection Control

 ,
,  , , ,
, , ,  and
and 
Abstract
:1. Introduction
- Fuzzy Control
- 2.
- Intelligent Algorithm
- 3.
- Robust Control
- 4.
- MPC
- 5.
- Improved PID
- 6.
- SMC
- 7.
- Adaptive Control
2. Ship Model
2.1. Assumptions
- (1)
- The motion of the ship in roll, pitch and heave is neglected.
- (2)
- The motion of the ship is regarded as a plane motion.
- (3)
- The water area of the ship is wide enough, and the hull draft is unchanged during the movement.
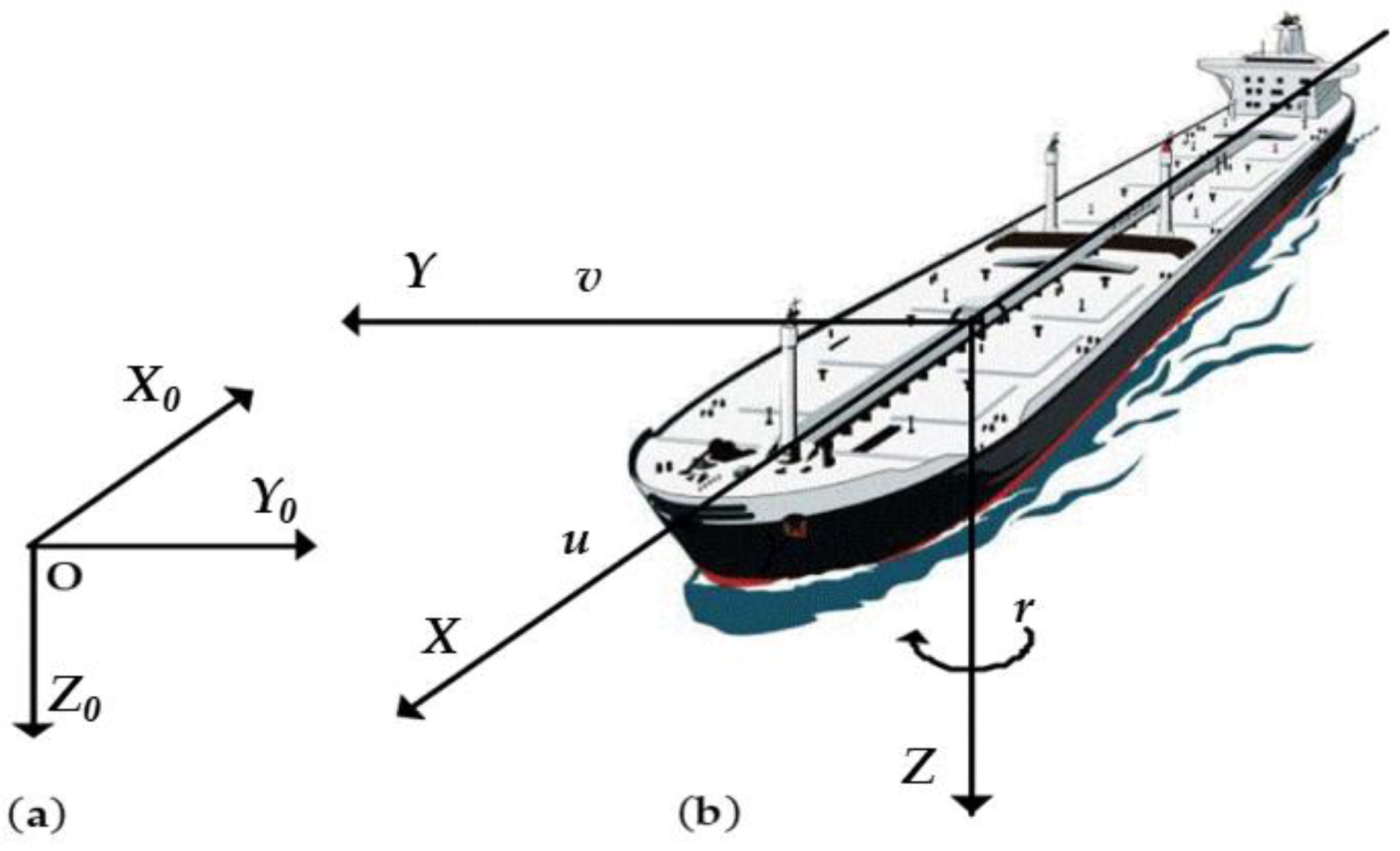
2.2. Coordinate System
2.3. Mathematical Model of the Ship
2.3.1. Kinematic Model
2.3.2. Dynamic Model
3. Environmental Disturbances including Wind and Wave
3.1. Wind Disturbance
3.2. Wave Disturbance
4. ADRC Ship DP Controller
4.1. Basic Principle of ADRC
4.2. Stability Analysis of Control System
- (1)
- Set , and . The three variables are the estimations of tracking signal, differential signal and total disturbances, respectively.
- (2)
- Let the input be 0, then the output of TD is also 0.
- (3)
- Change the Nonlinear State Error Feedback (NLSEF) into Linear State Error Feedback (LSEF):
- (4)
- Select nonlinear function which satisfies that if , then . Define to satisfy the following conditions: ①; ② and then , namely .
- (5)
- Let the control object be a linear time-invariant object:
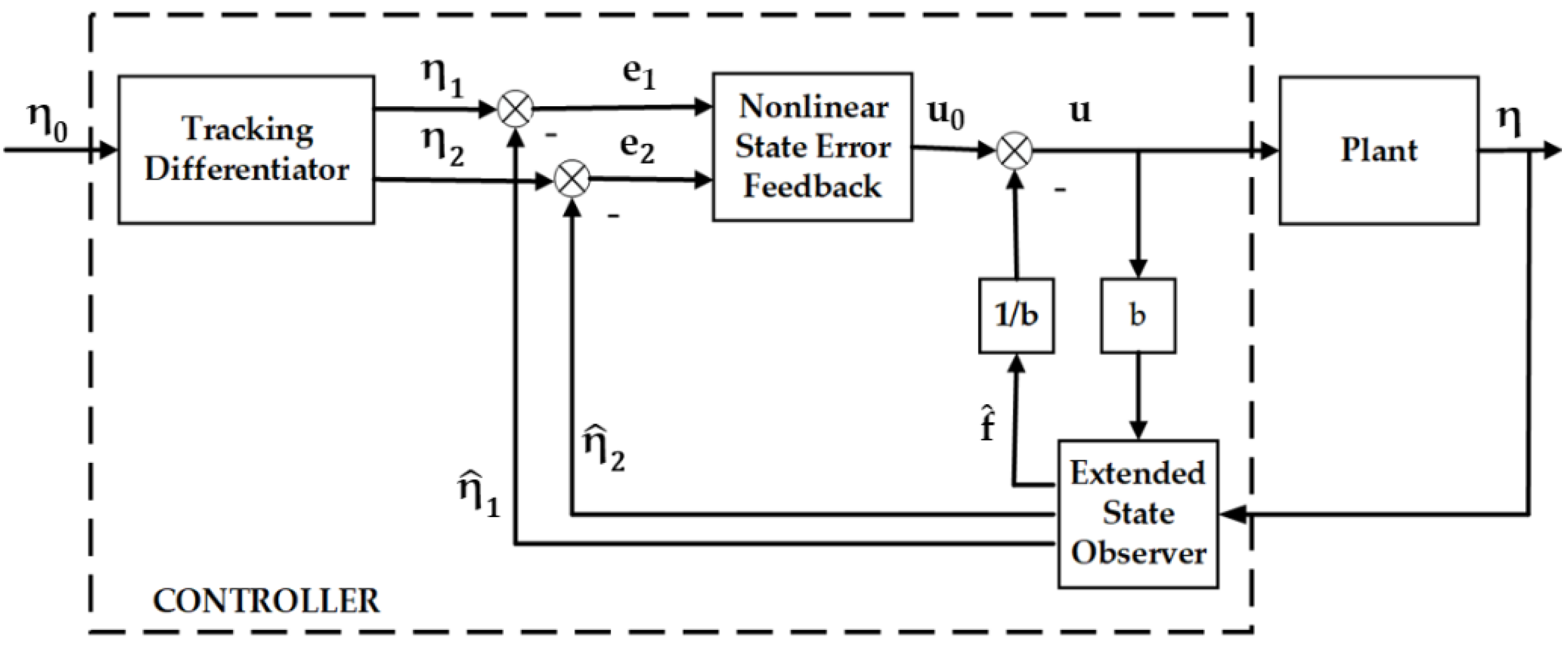
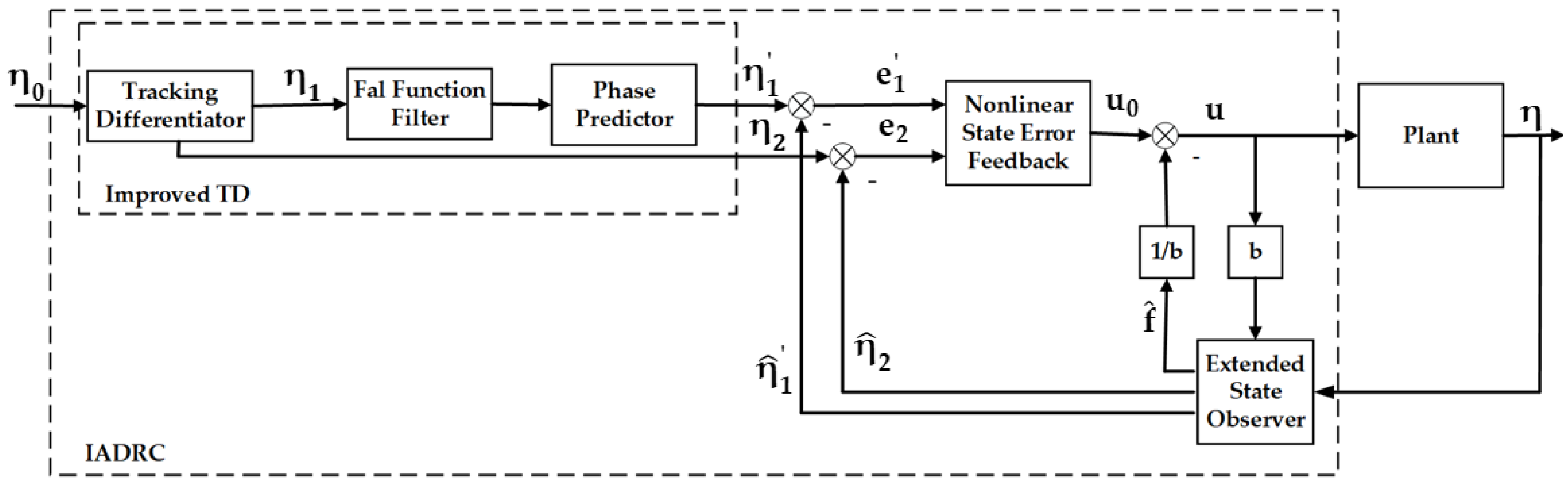
4.3. Structure of ADRC
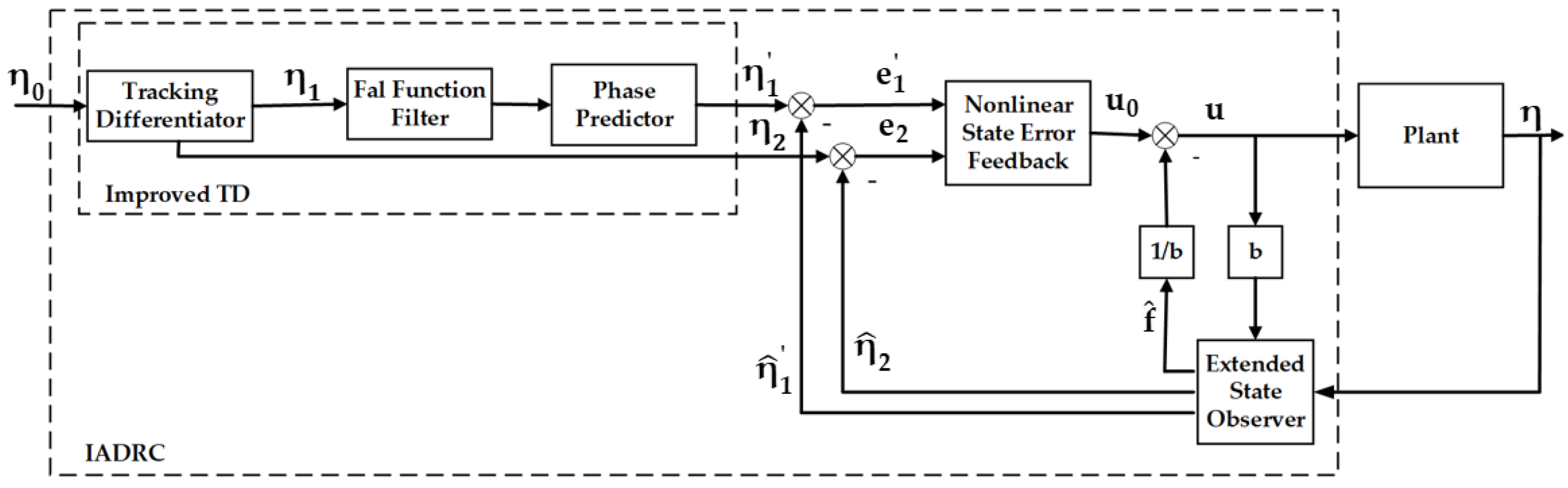
5. Improvement of ADRC Controller
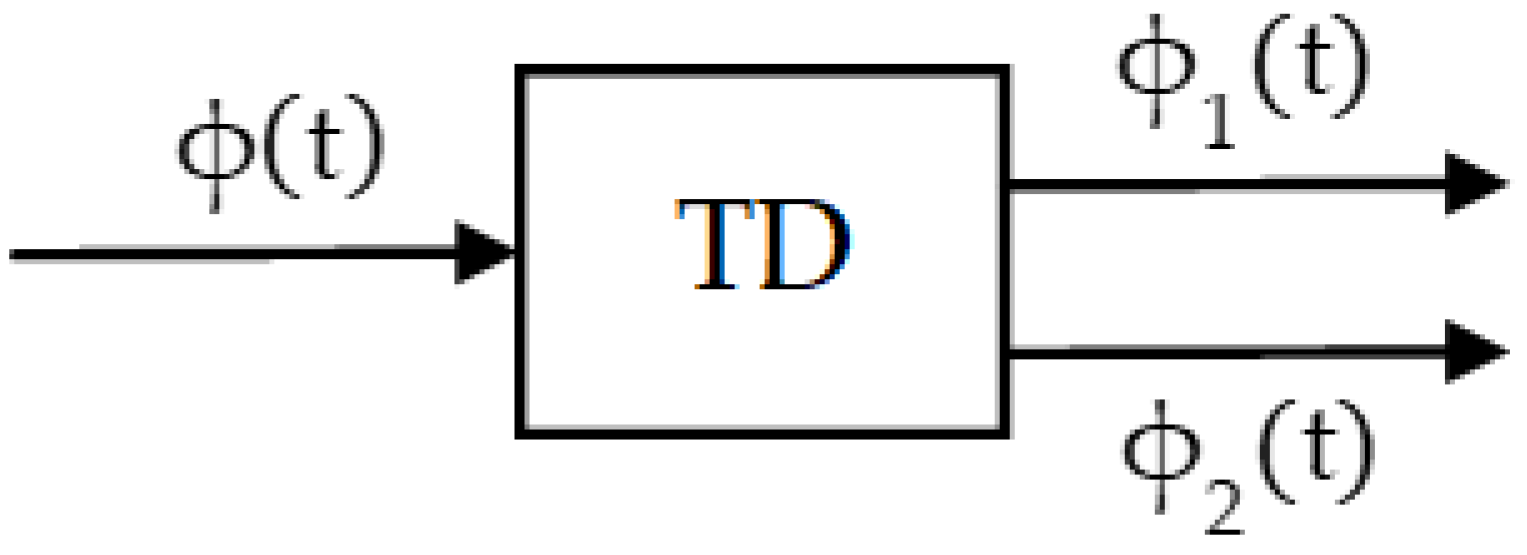
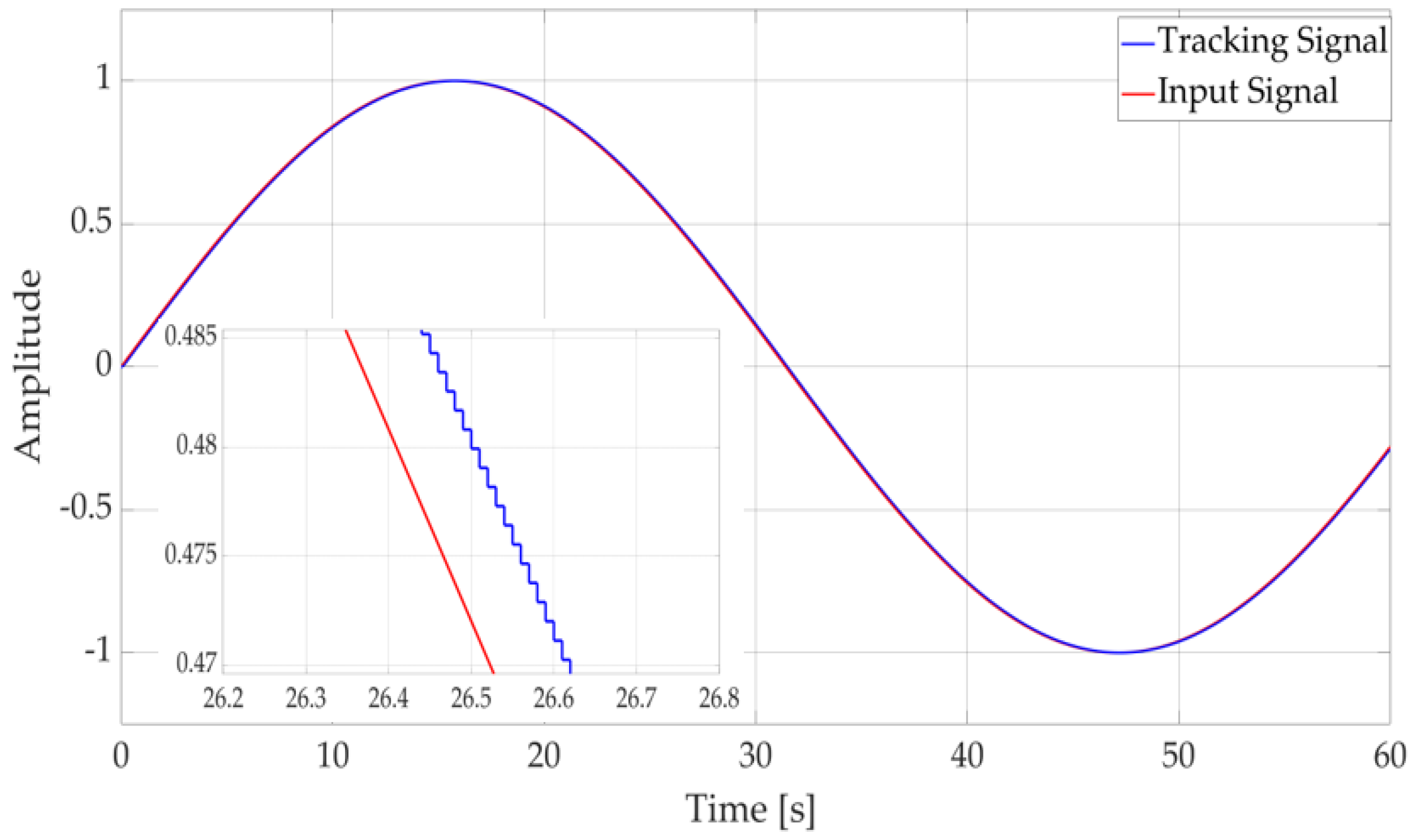
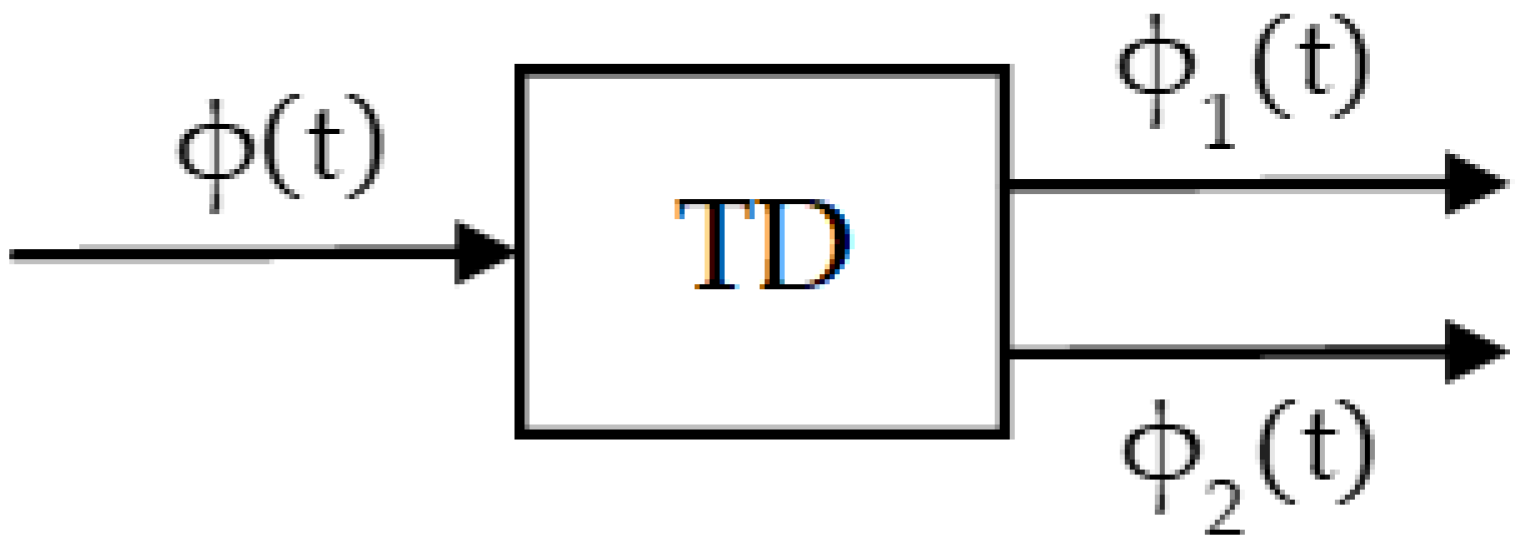
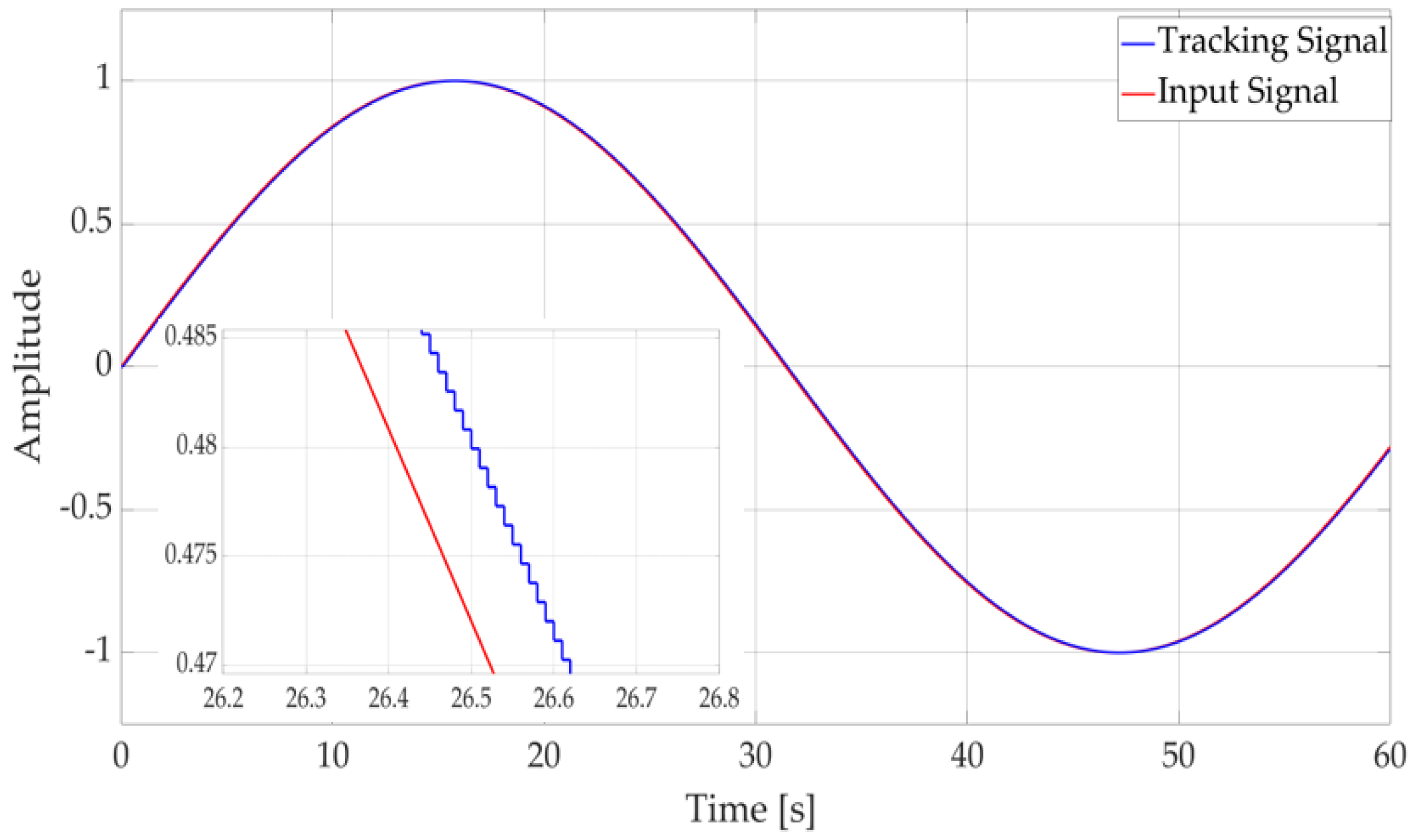
5.1. Analysis of TD Behavior and Limitations
5.2. Improvement Methods
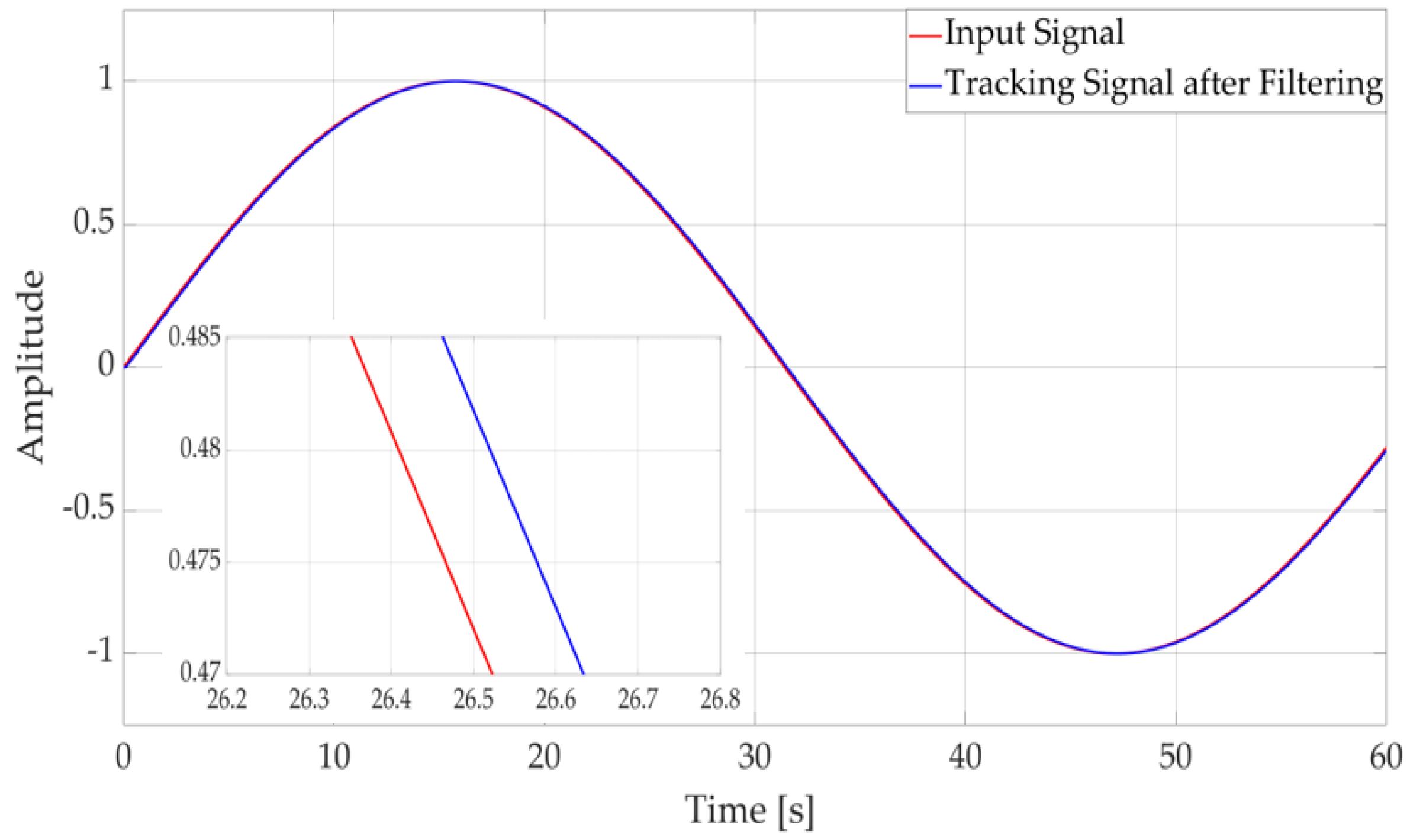
5.2.1. Fal Function Filter
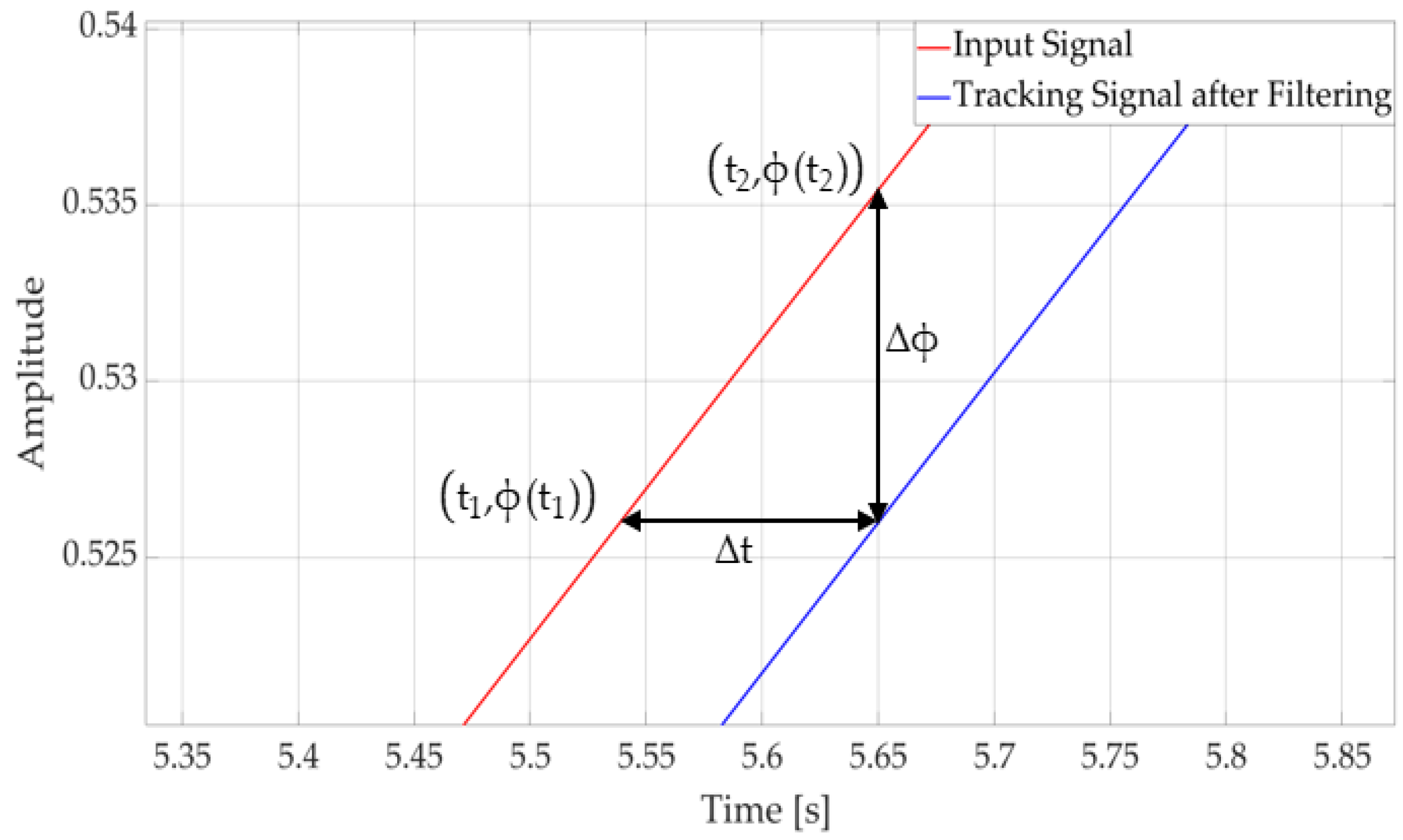
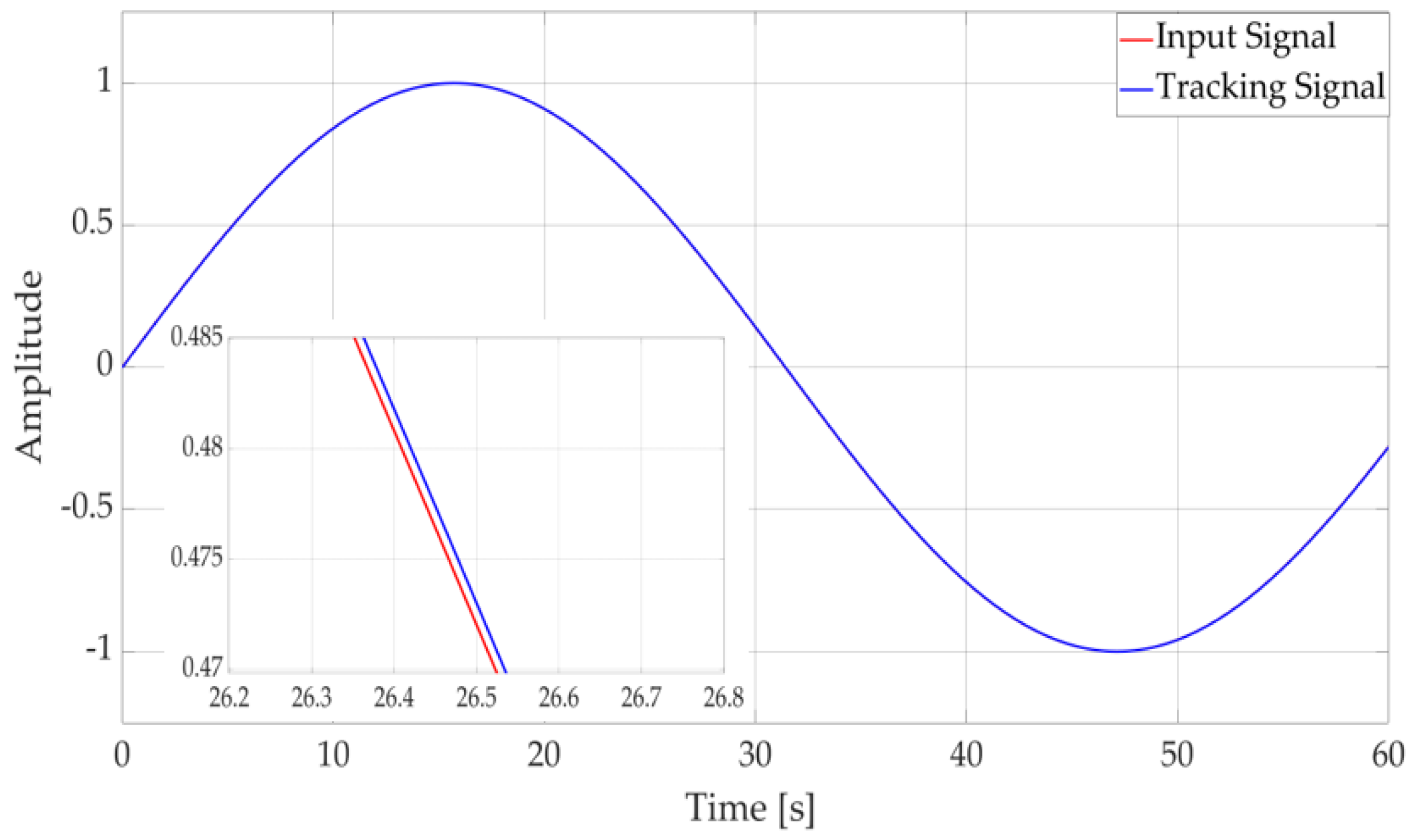
5.2.2. Phase Prediction
6. Simulation and Analysis
6.1. Fixed-Point Control and Yaw Control Based on Classical ADRC
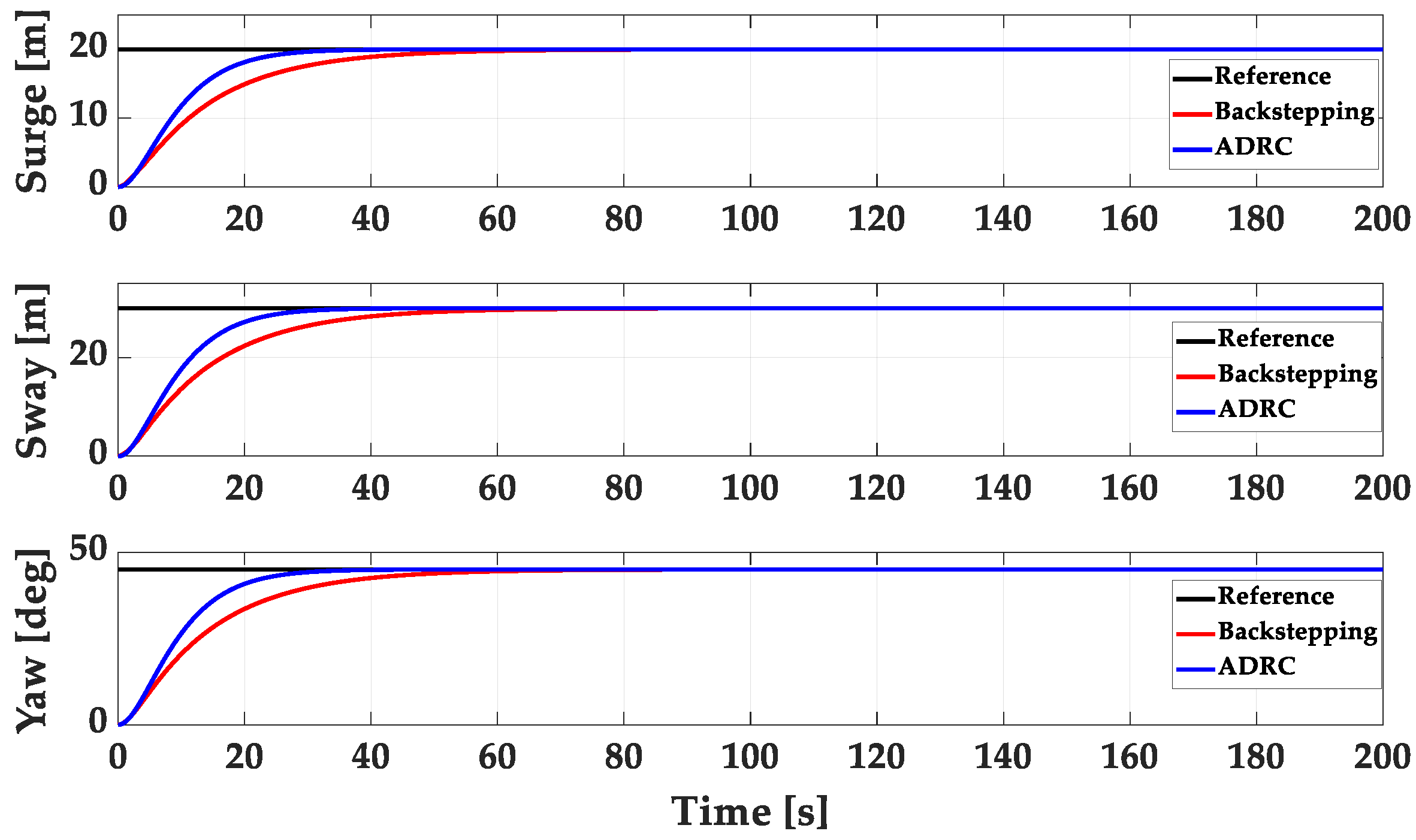
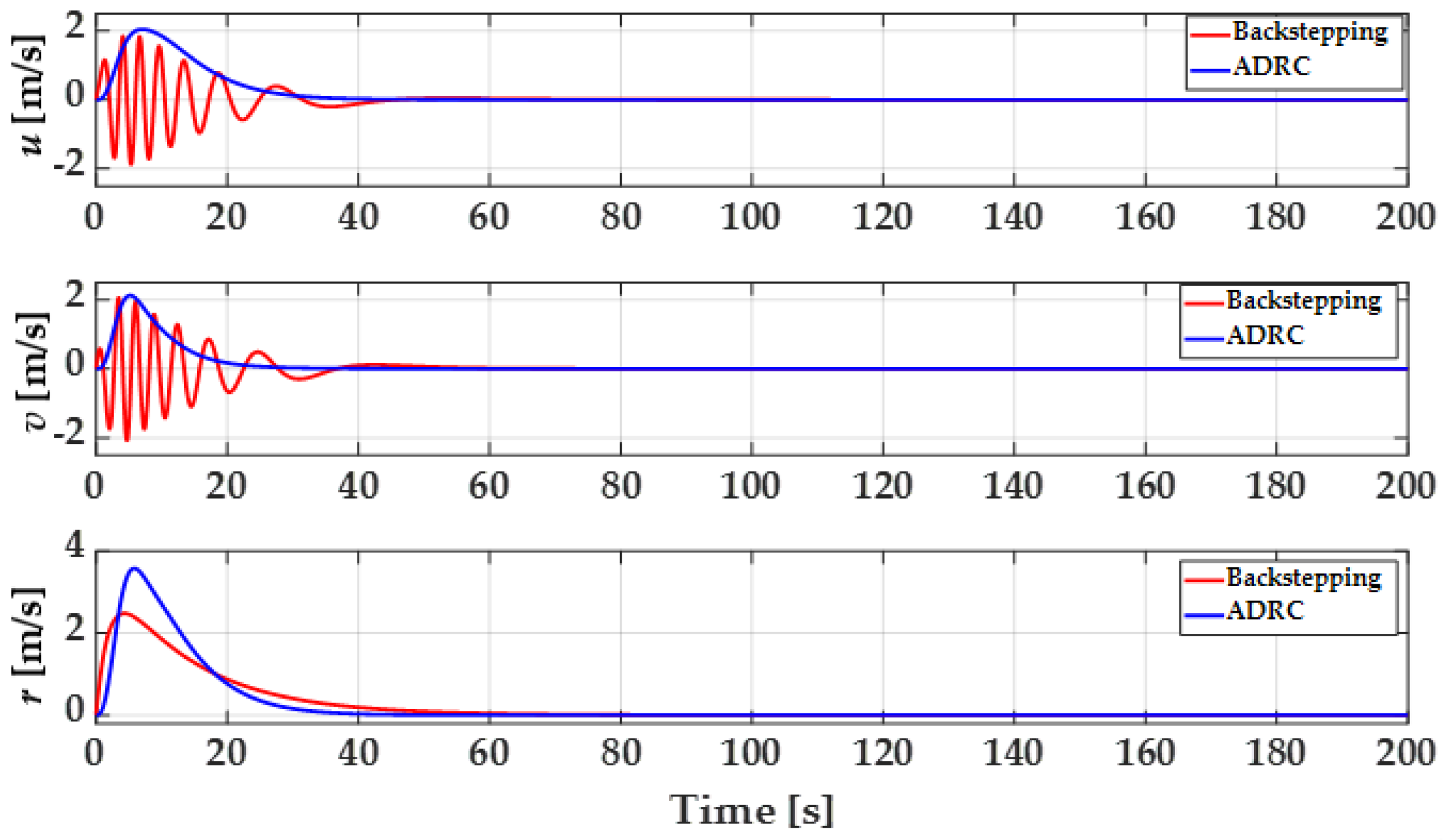
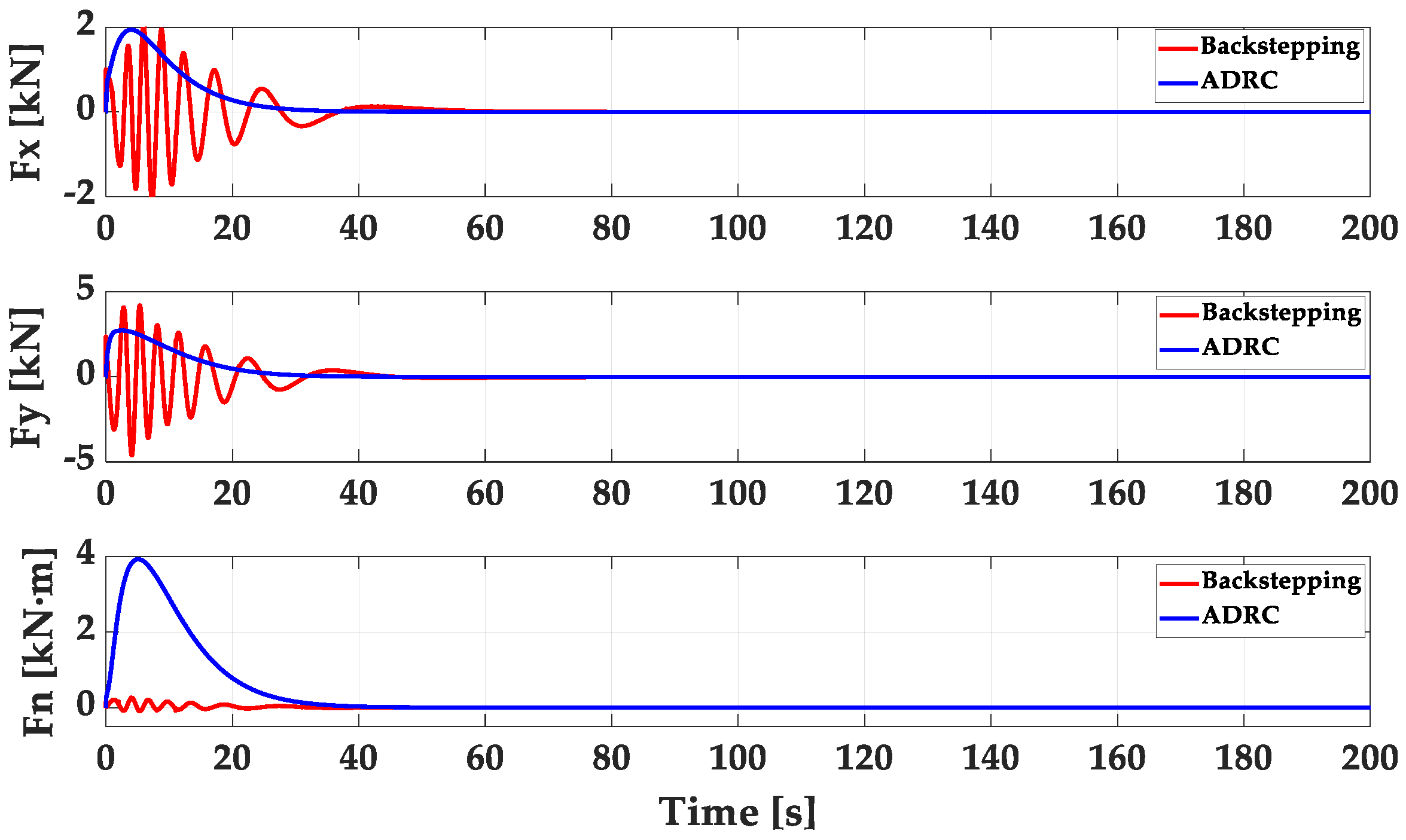
6.1.1. Simulation under Ideal Sea Condition
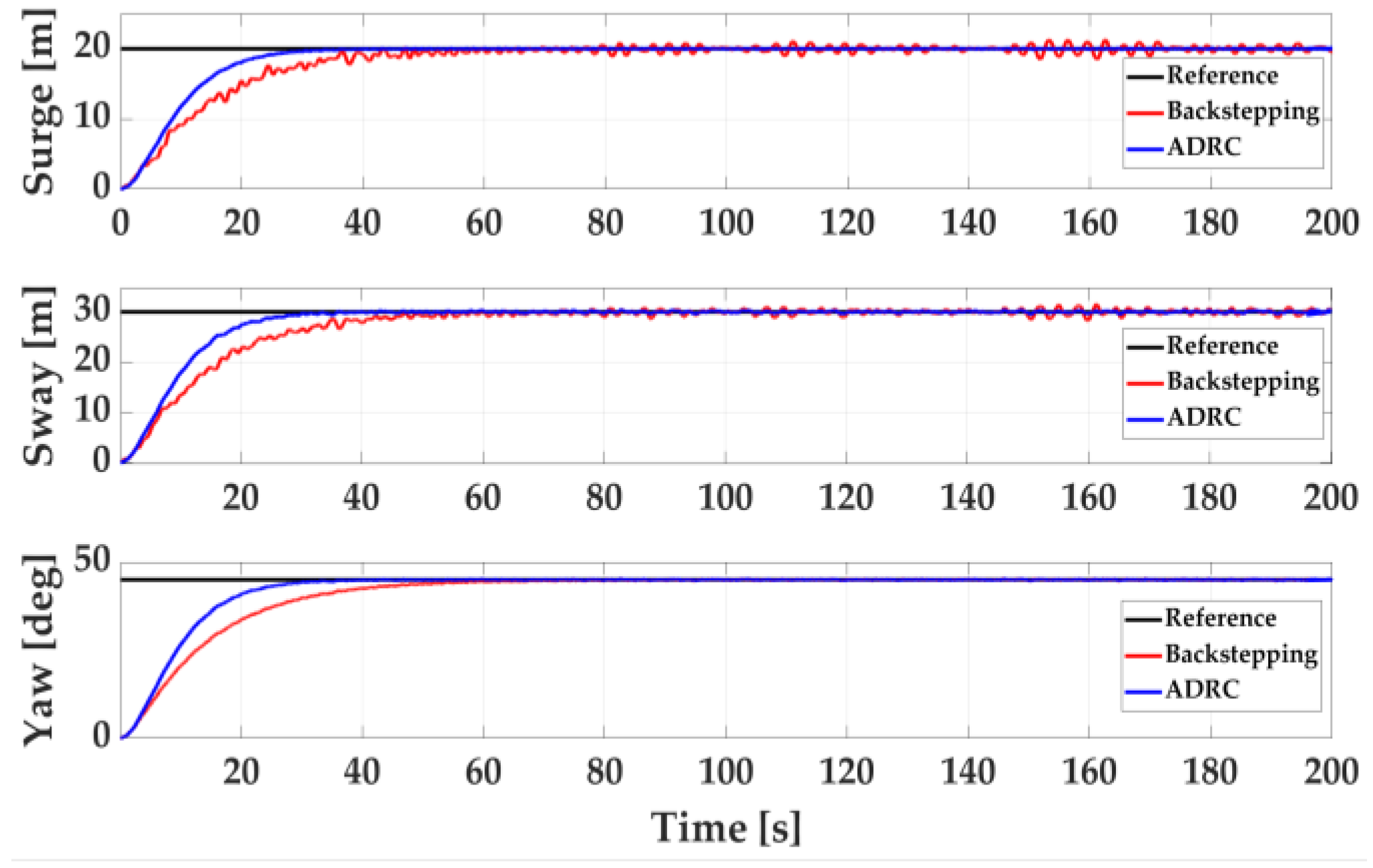
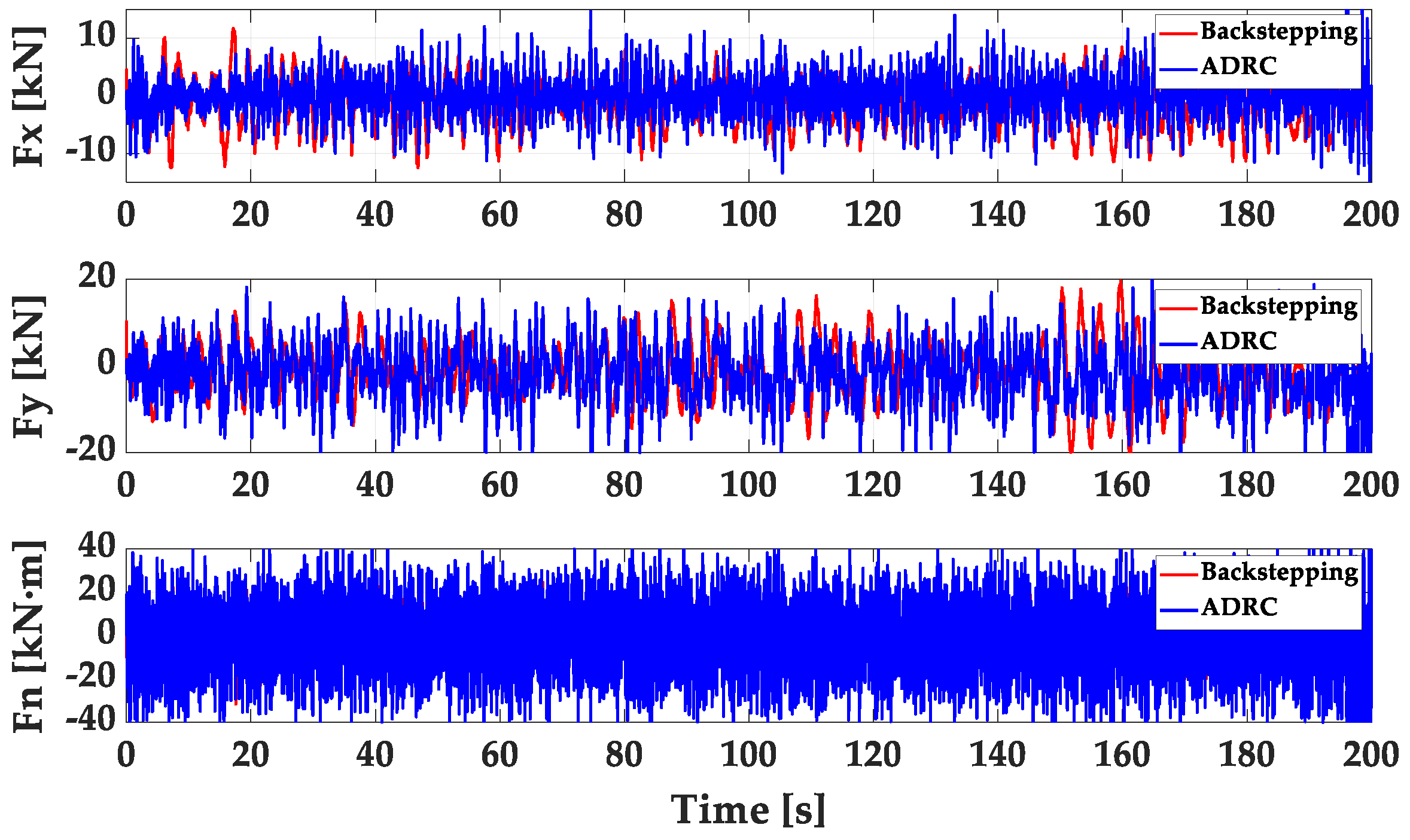
6.1.2. Simulation under Environmental Disturbances
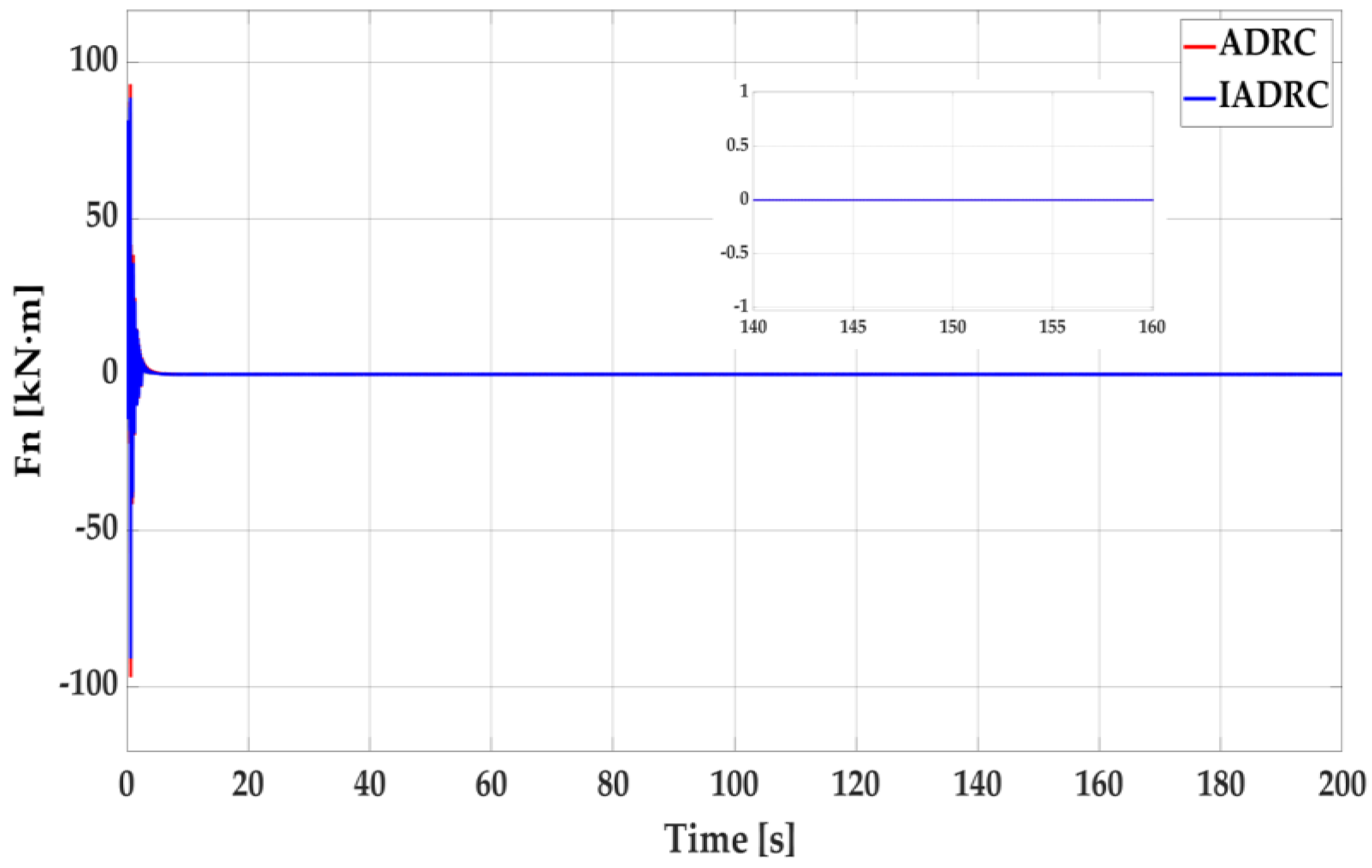
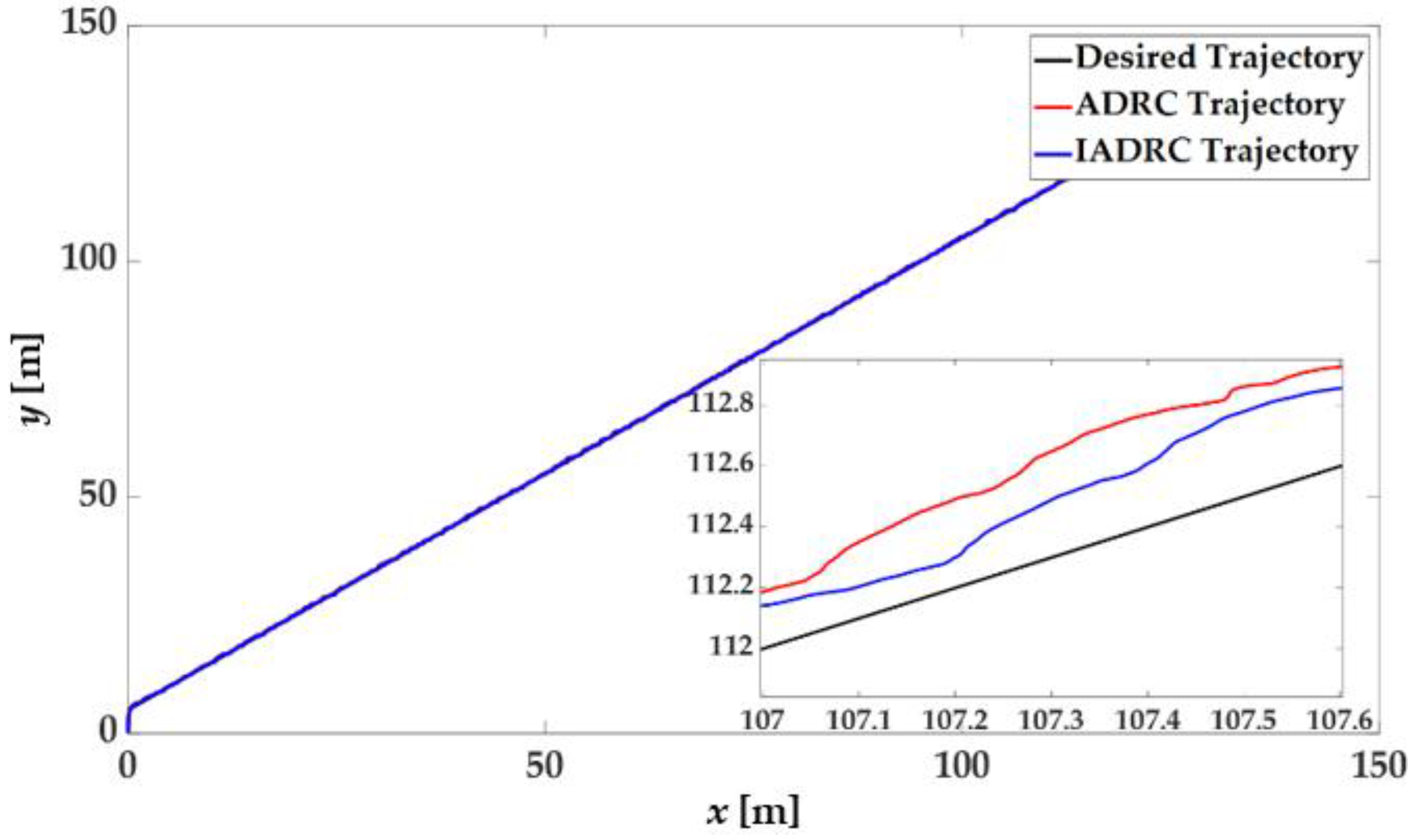
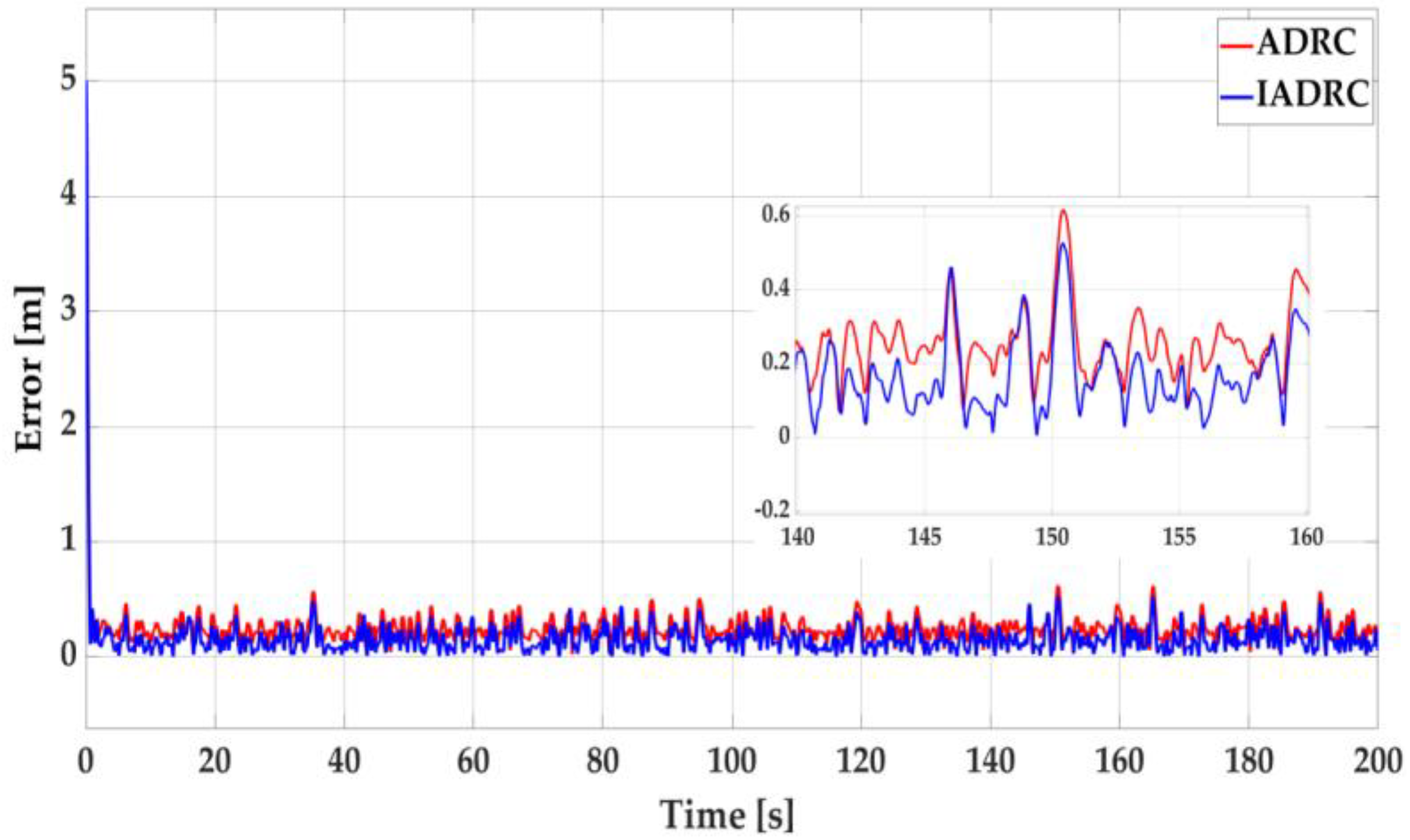
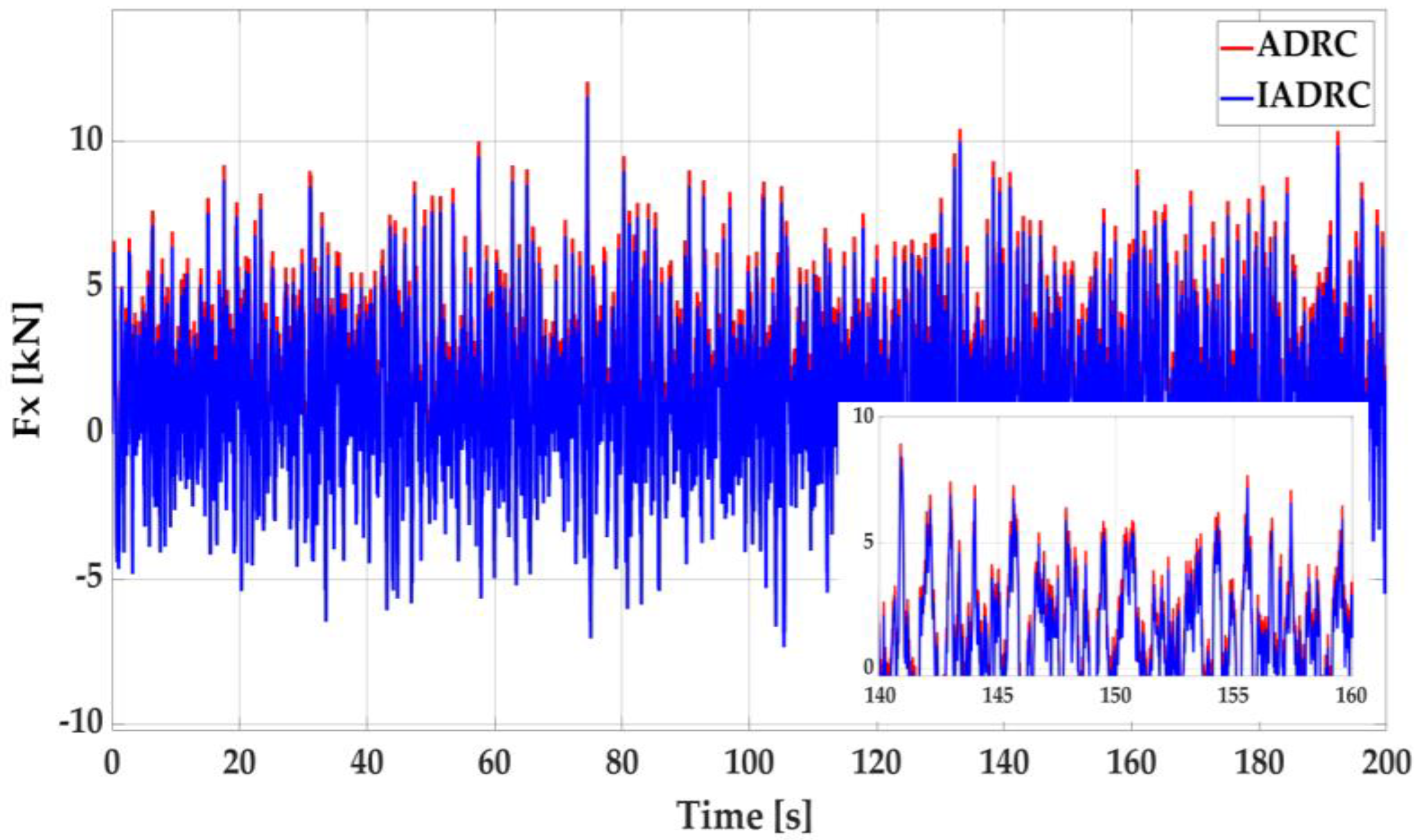
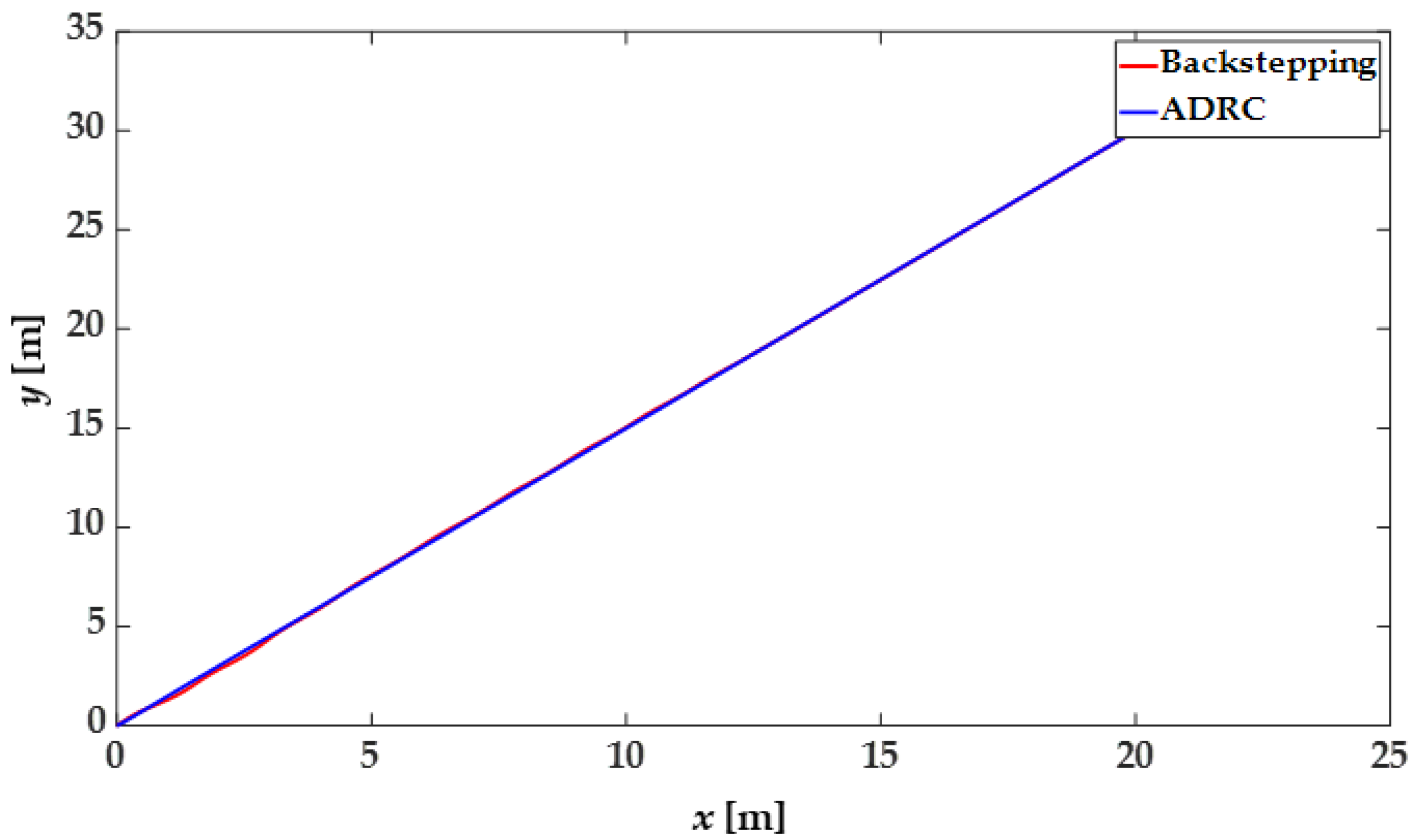
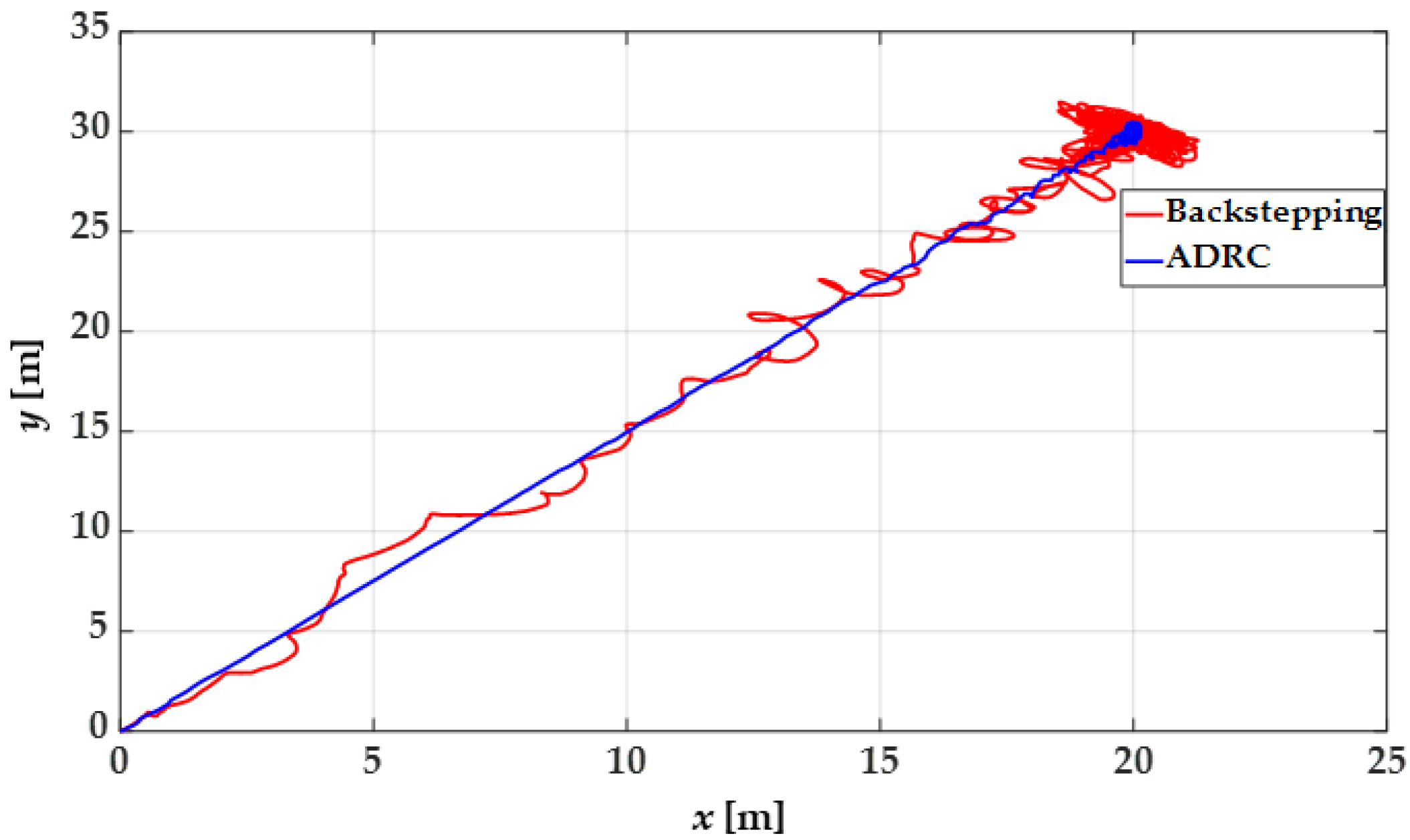
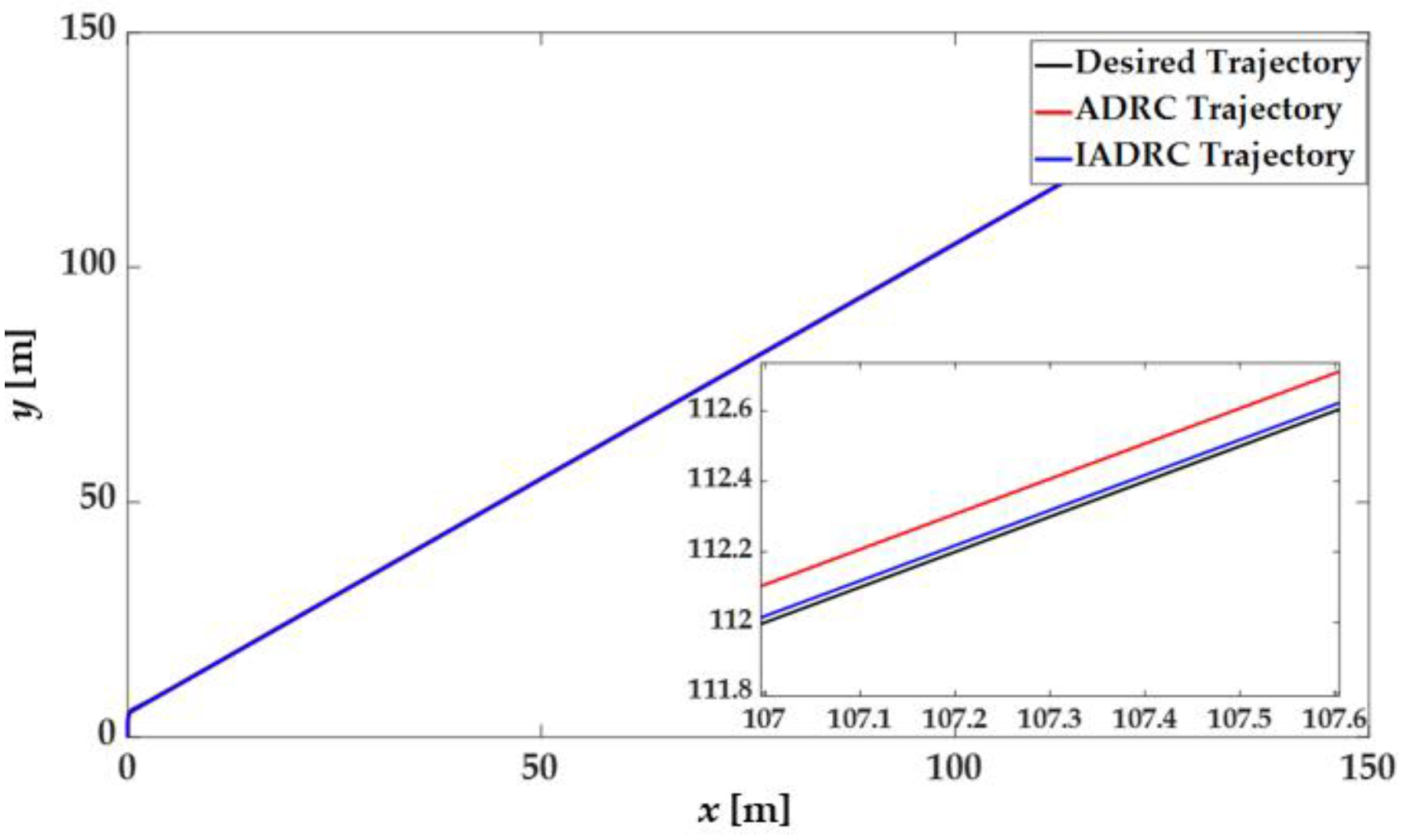
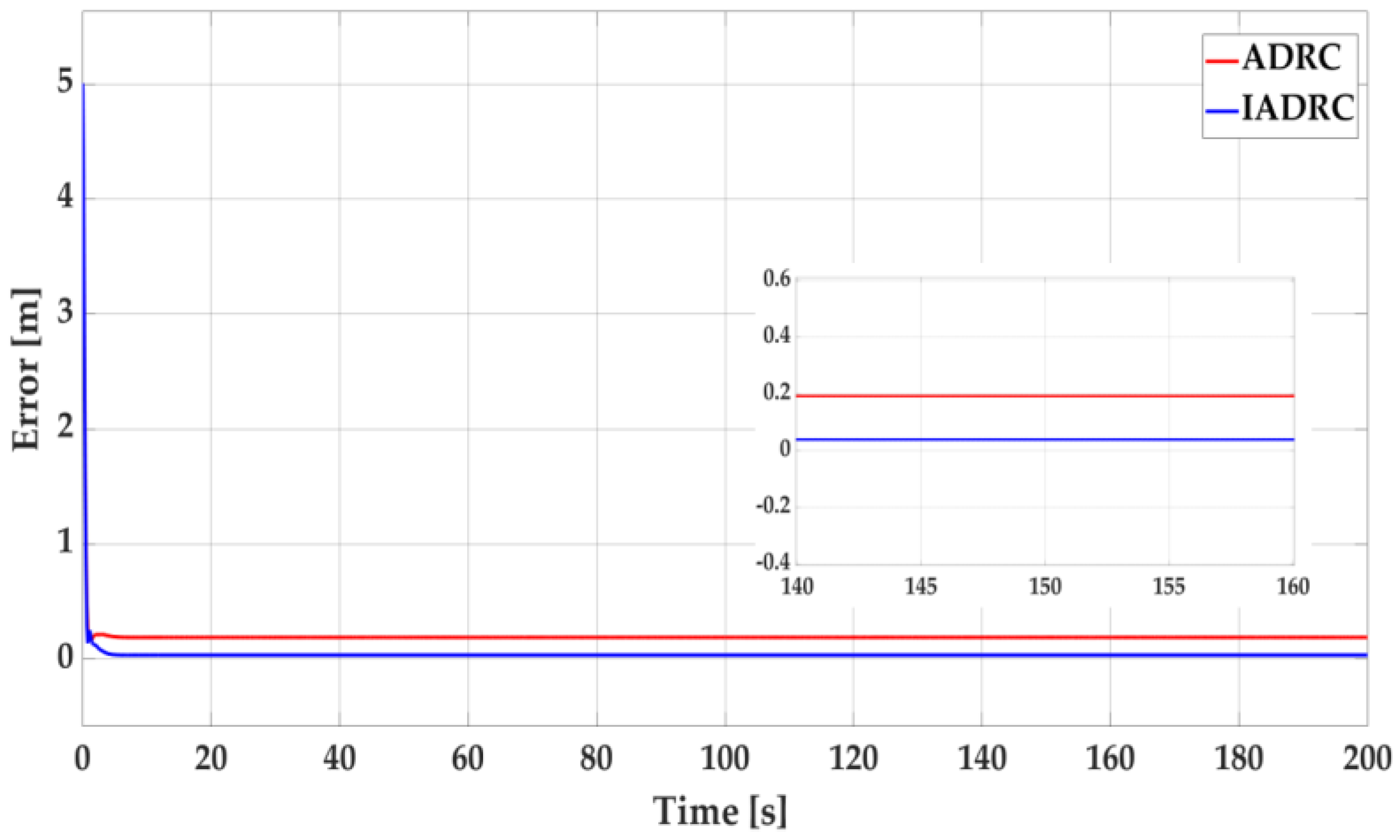
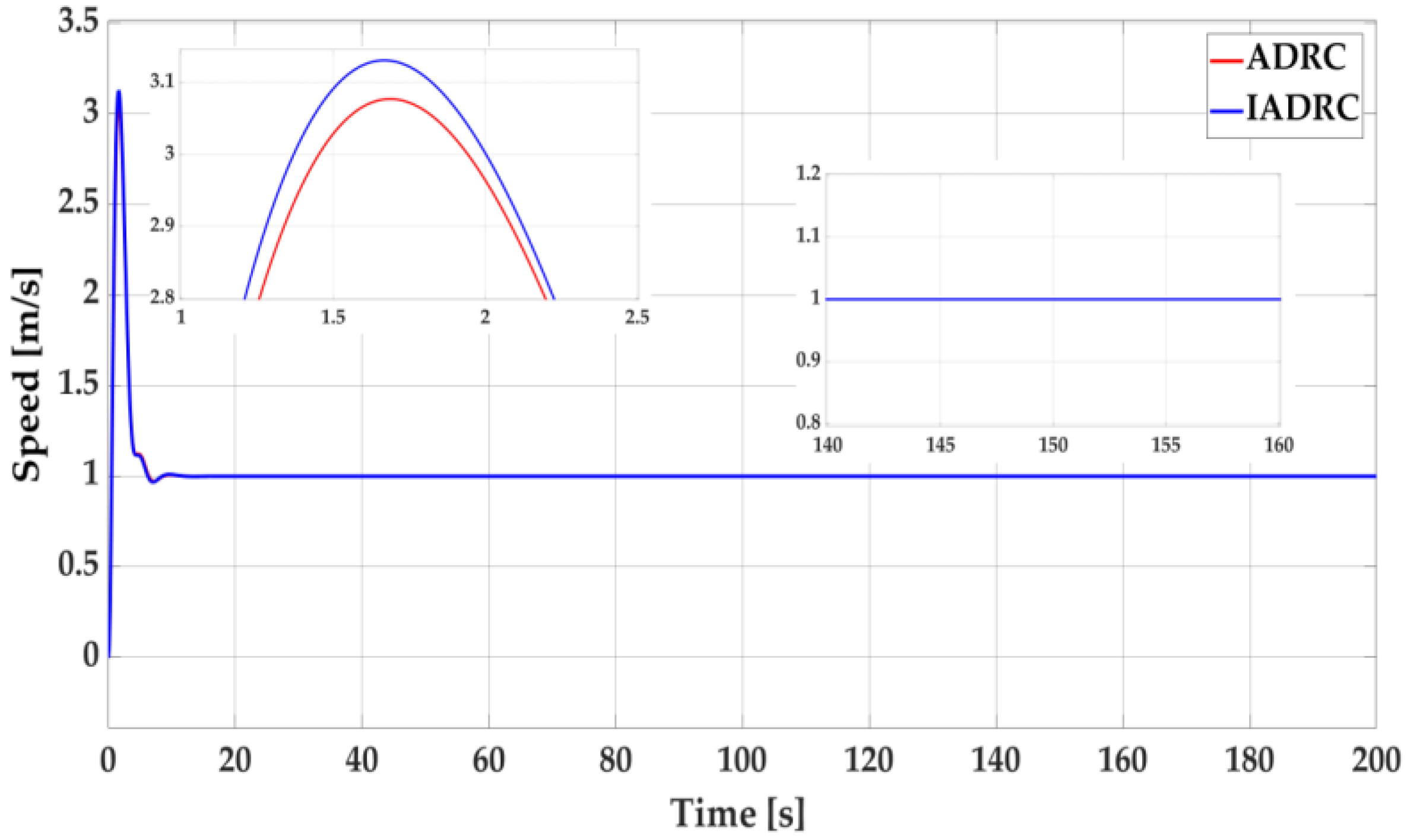
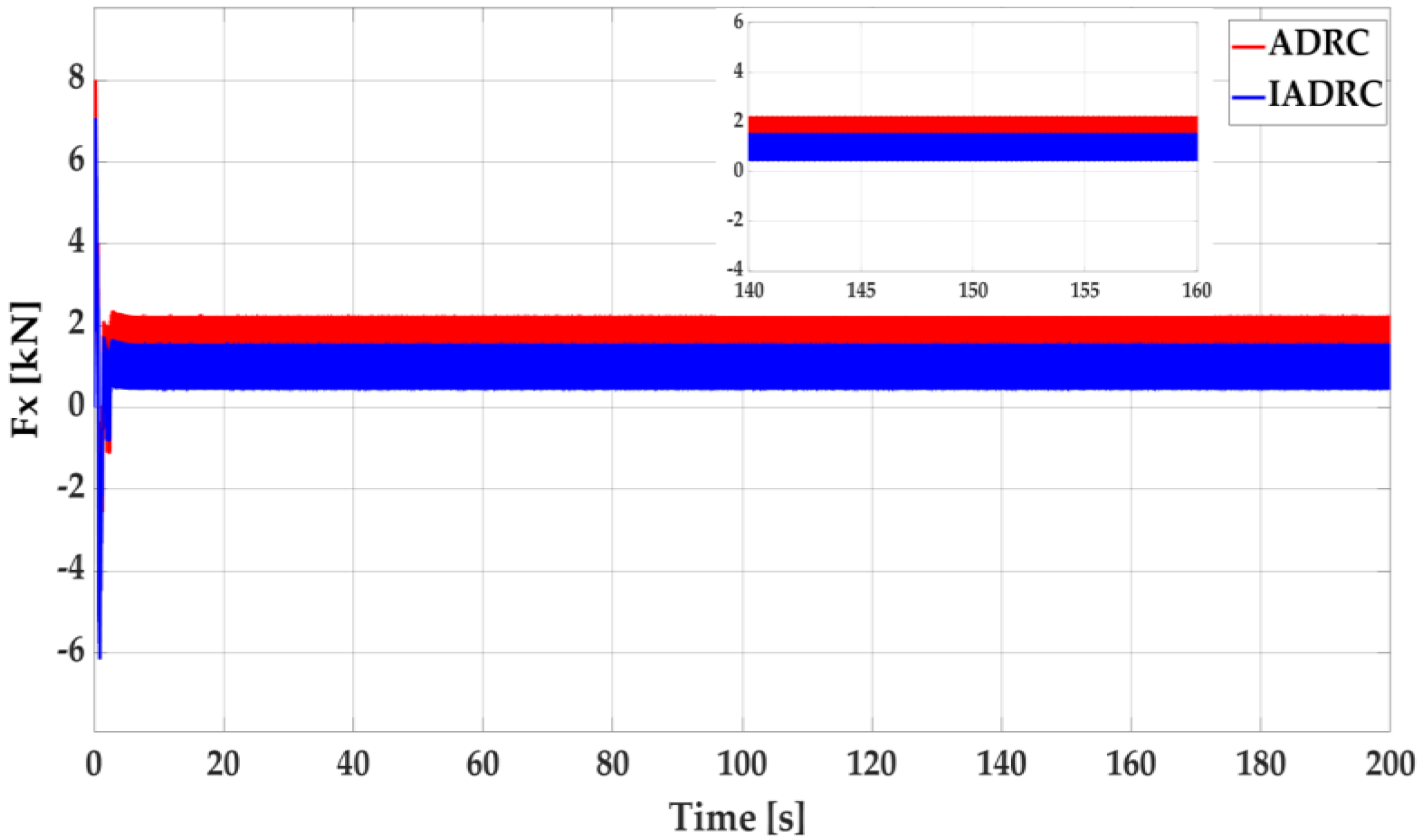
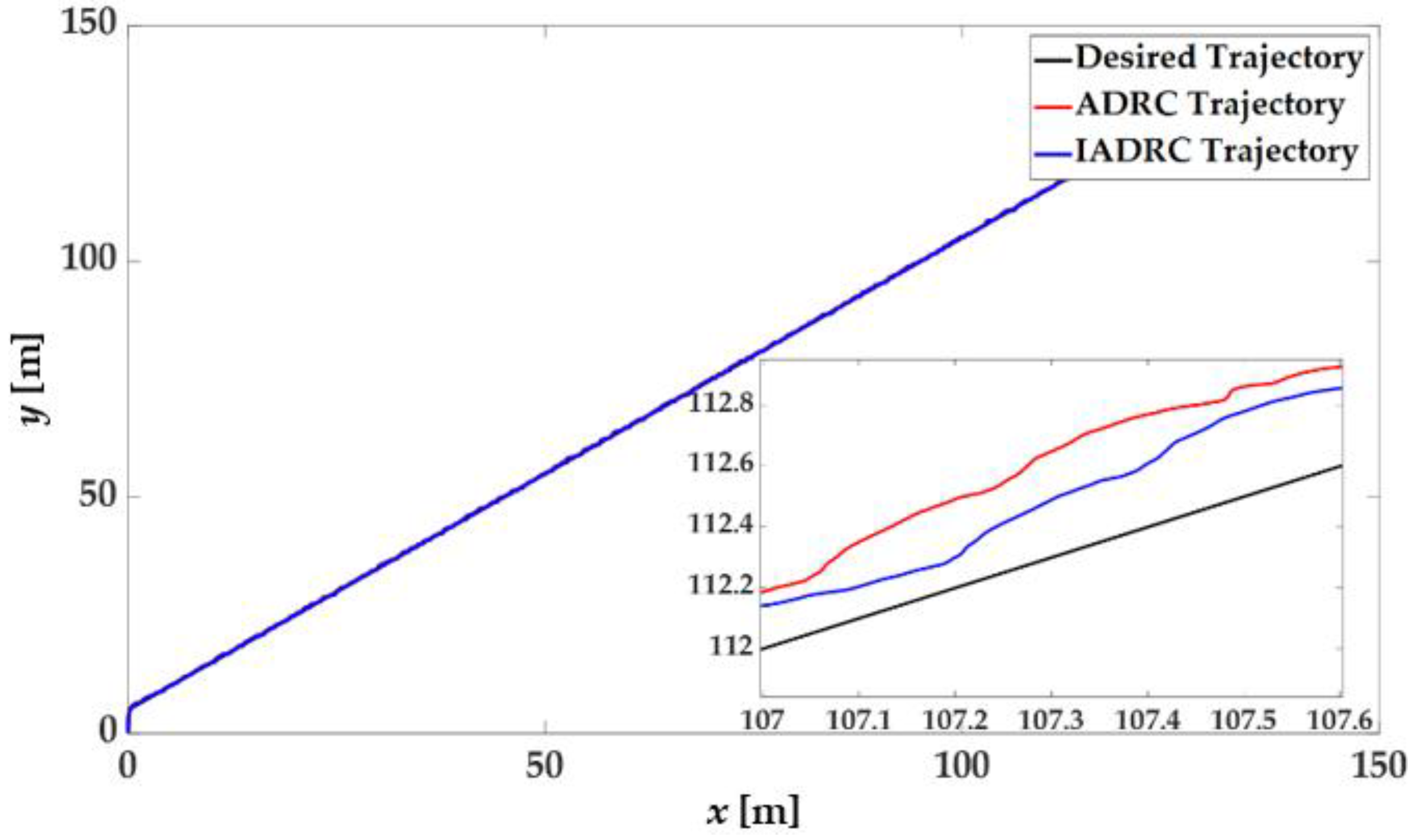
6.2. Straight Track Control Based on IADRC
6.2.1. Simulation under Ideal Sea Condition
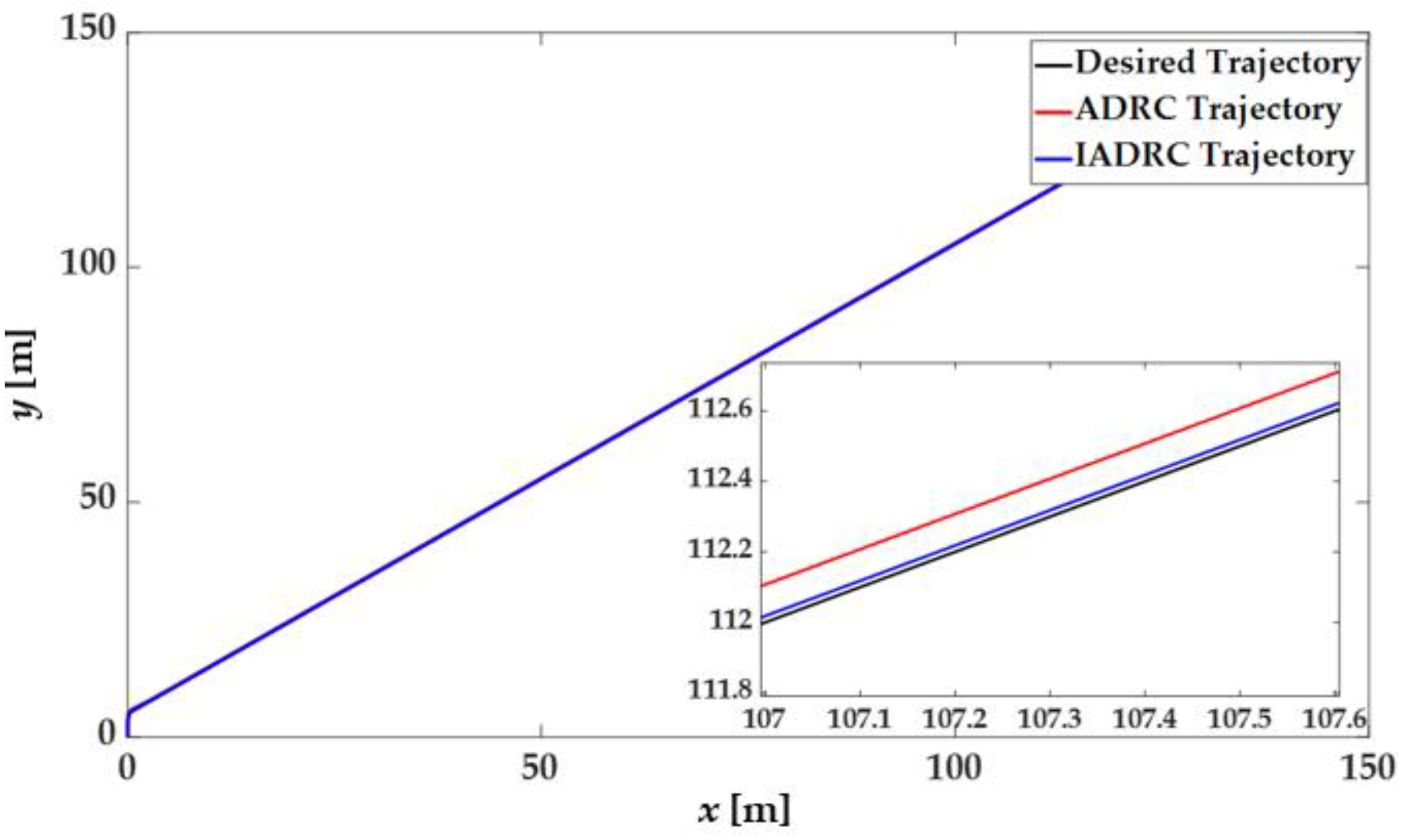
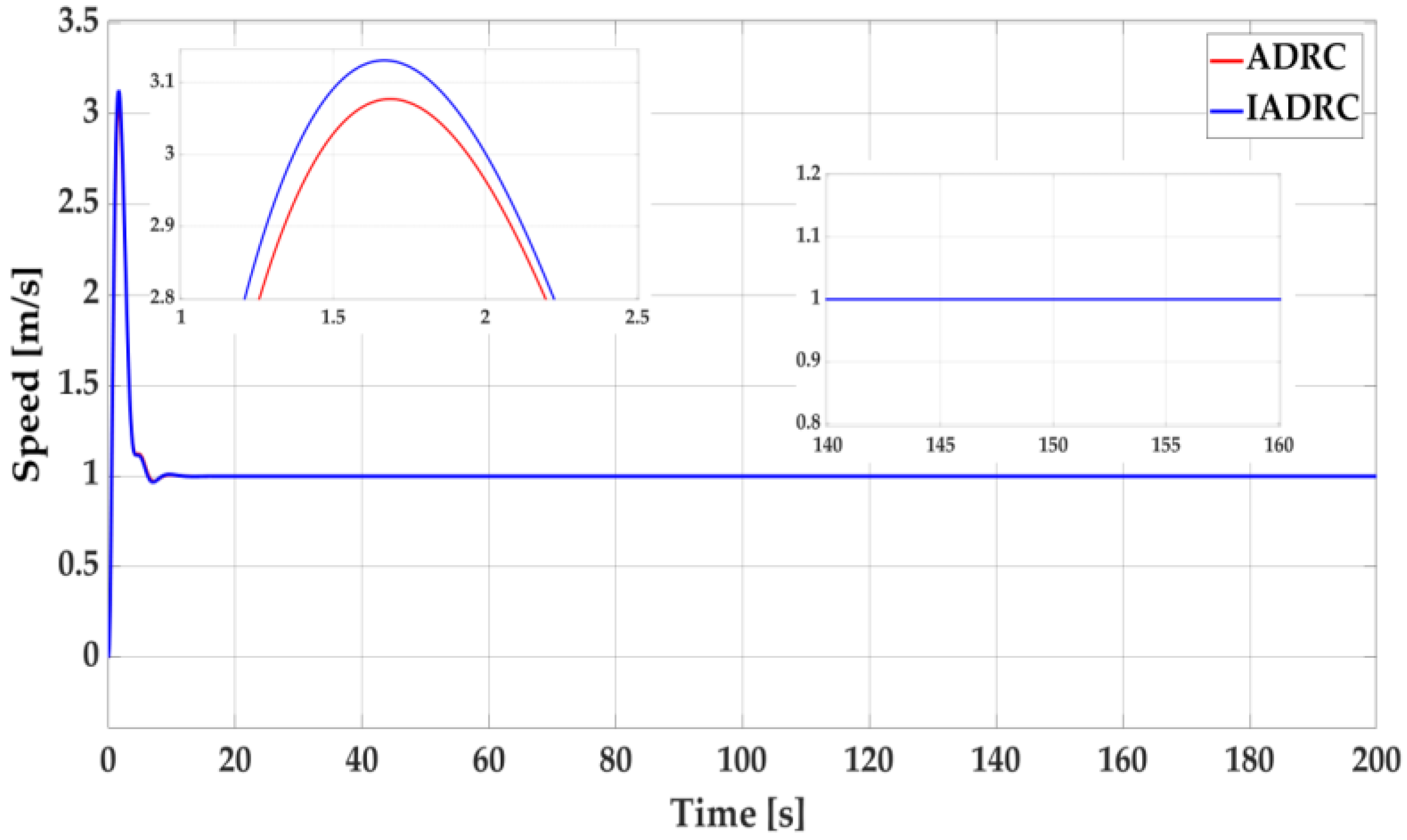
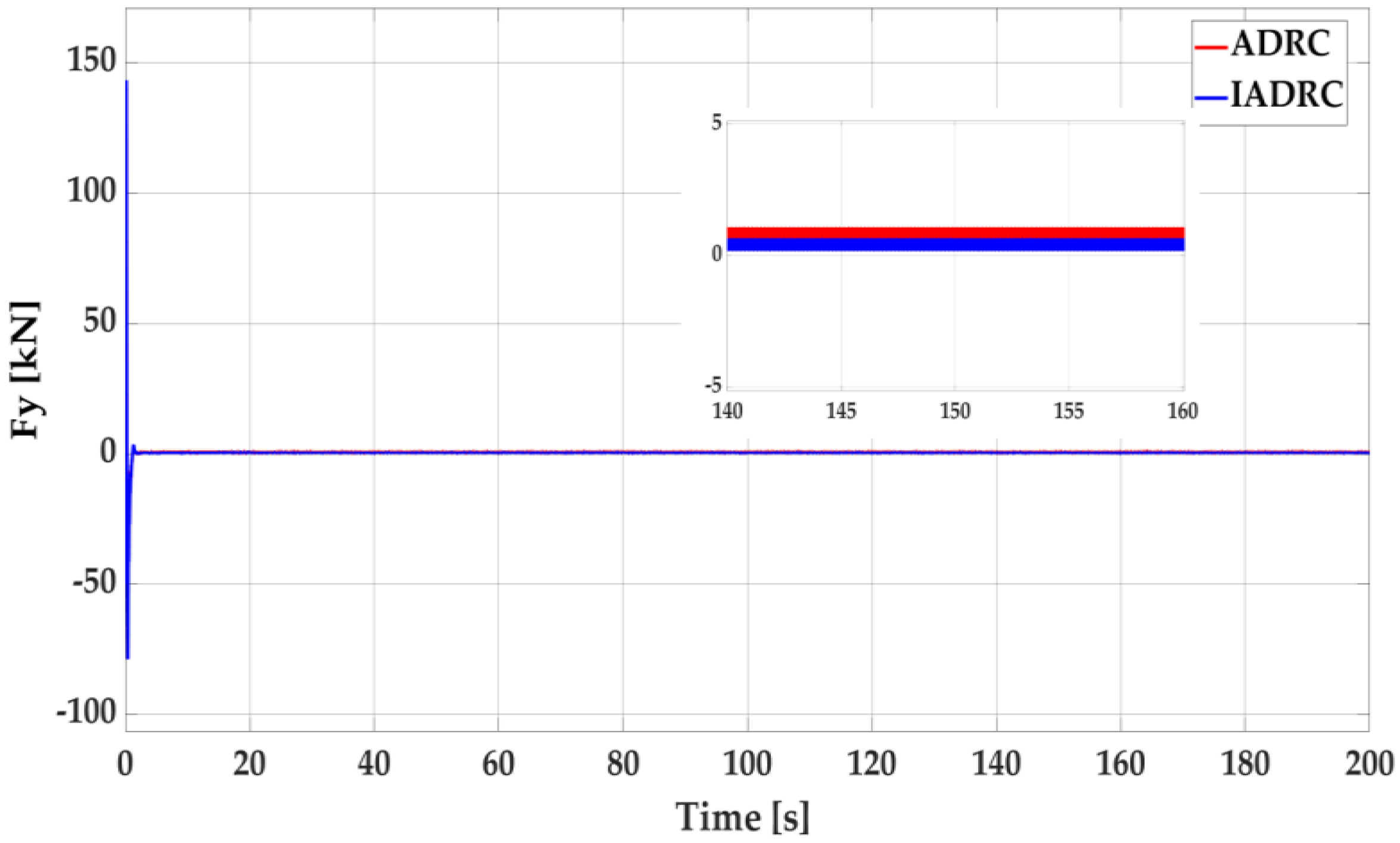
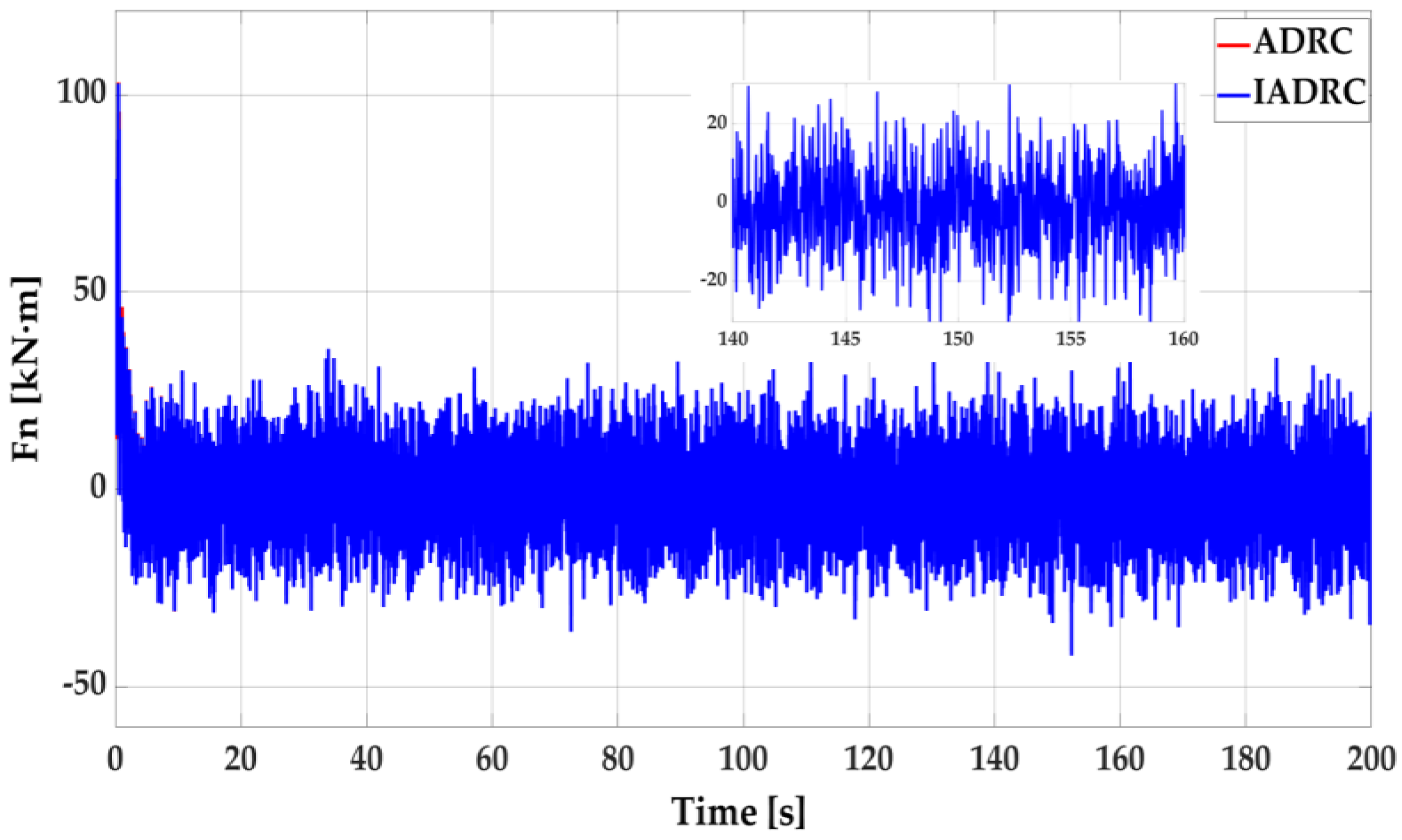
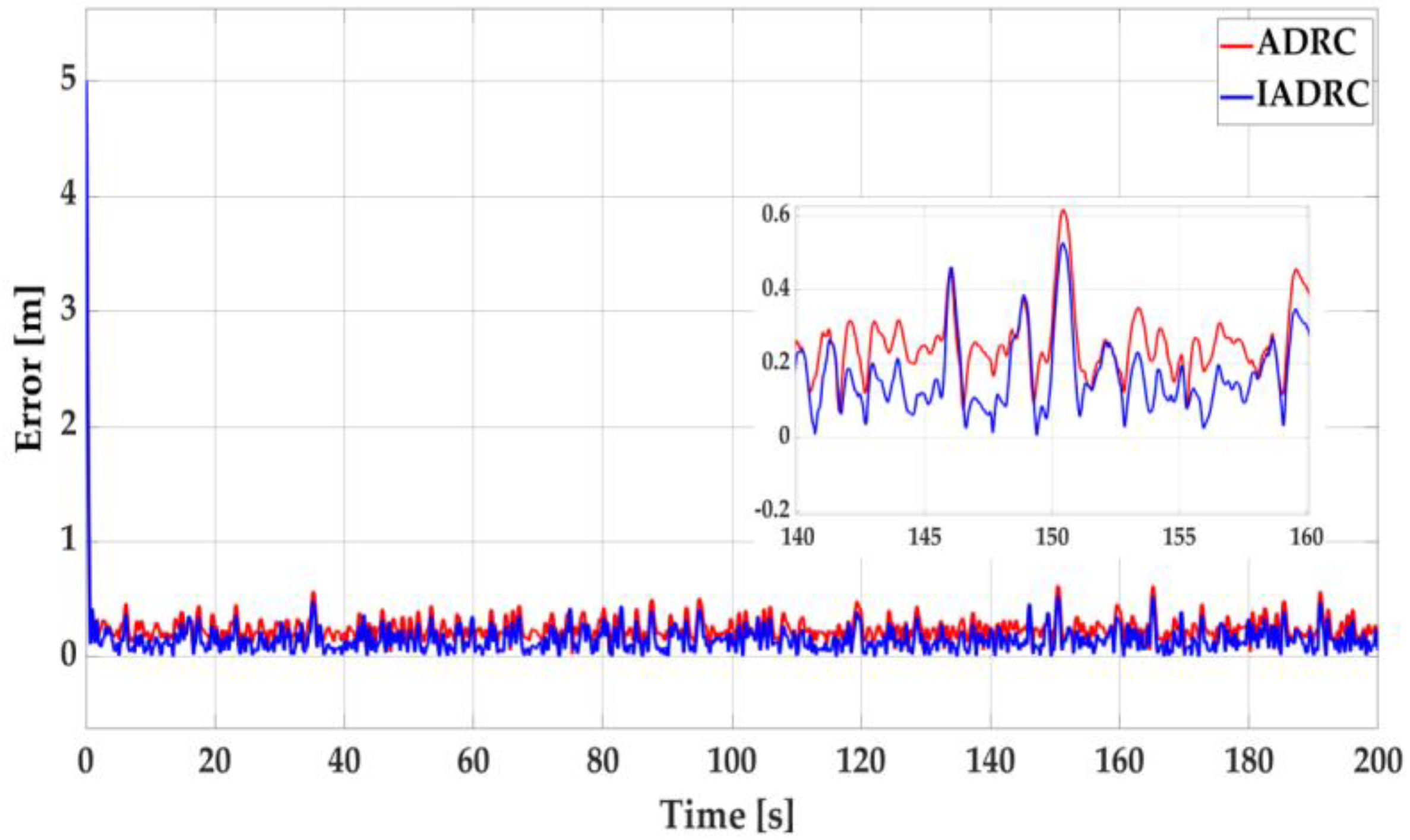
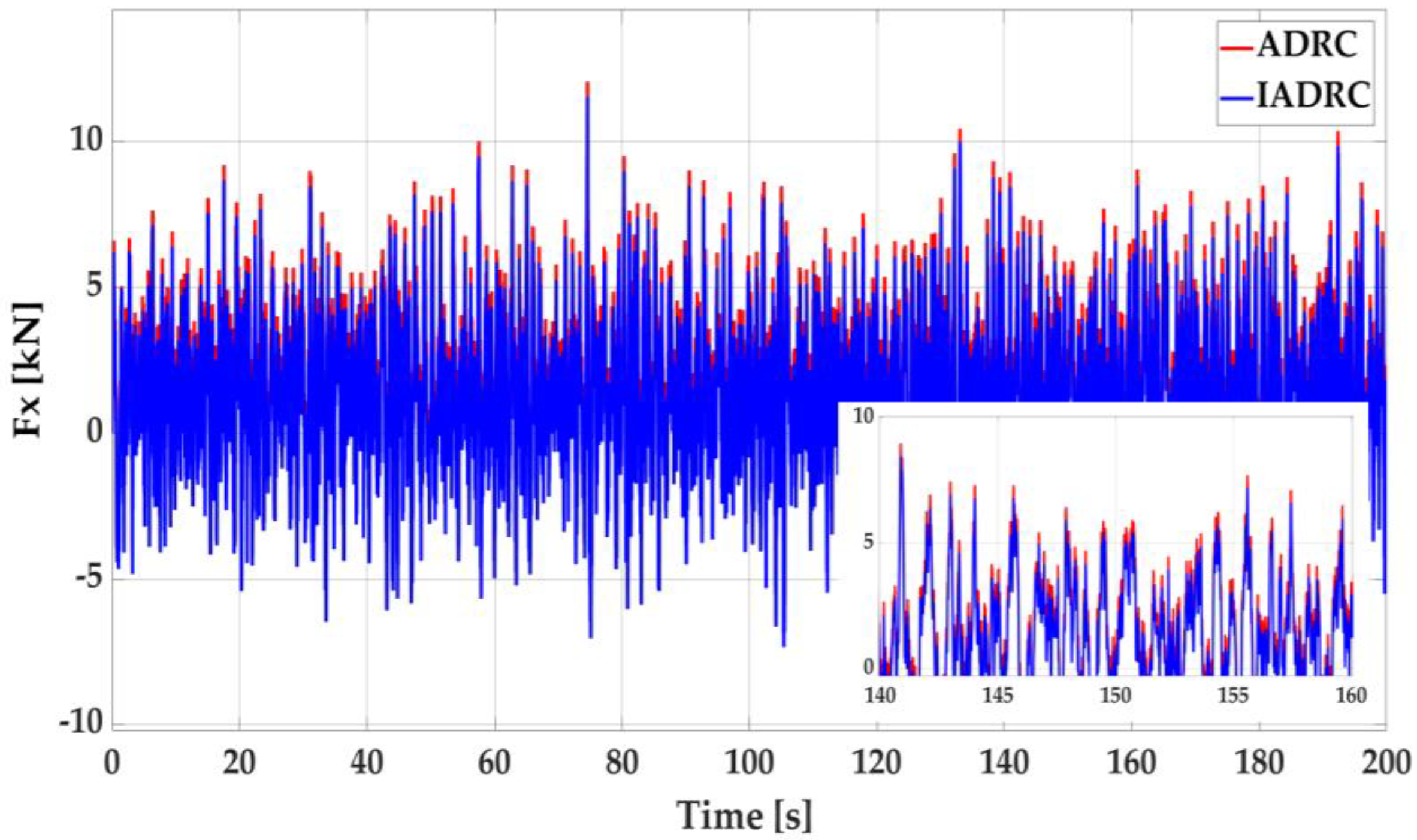
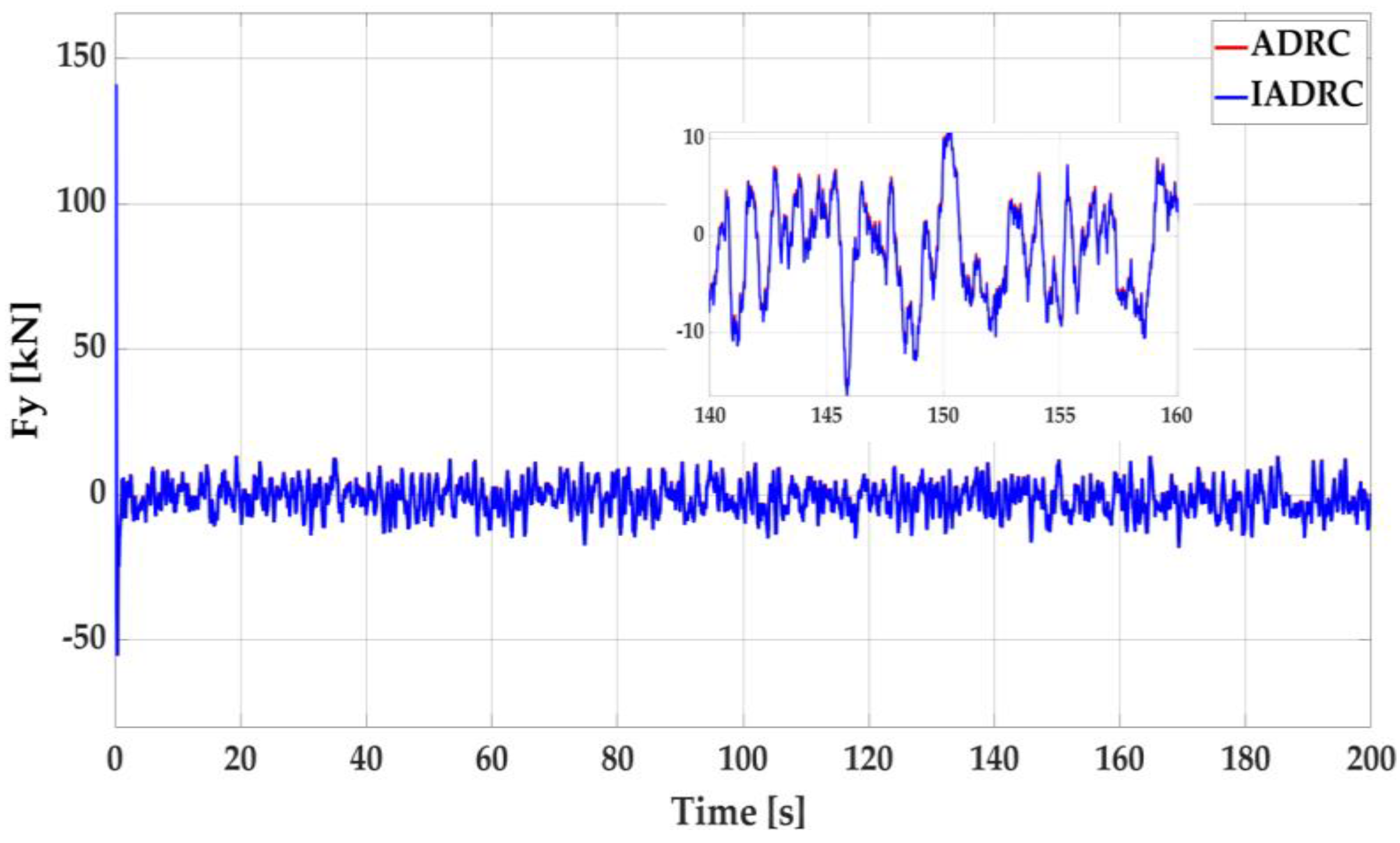
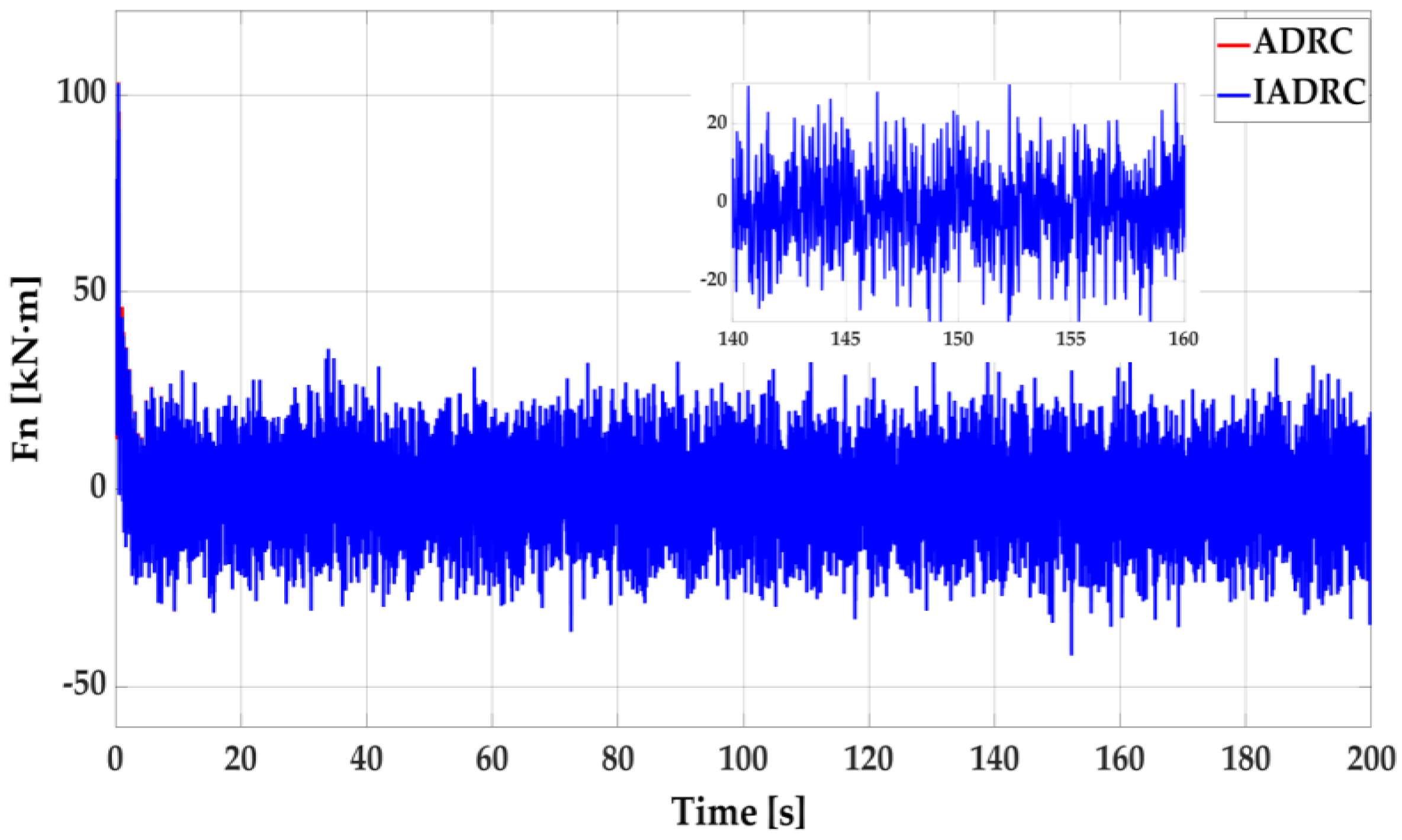
6.2.2. Simulation under Environmental Disturbances
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| ADRC | Active Disturbance Rejection Control |
| DP | Dynamic Positioning |
| DSMC | Dynamic Sliding Mode Control |
| DSC | Dynamic Surface Control |
| DOF | Degrees of Freedom |
| ESO | Extended State Observer |
| FTSO | Finite-Time State Observer |
| FTFC | Finite-Time Feedback Control |
| FTSMC | Fast Terminal Sliding Mode Control |
| IAD-PBC | Interconnection and Damping Assignment-Passivity Based Control |
| IADRC | Improved Active Disturbance Rejection Control |
| LMPC | Linearized Model Predictive Control |
| LQR | Linear Quadratic Regulator |
| LS | Least Square |
| MV | Multi-Variable |
| MLP | Minimal Learning Parameter |
| MPC | Model Predictive Control |
| MSE | Mean Square Error |
| NMPC | Nonlinear Model Predictive Control |
| NED | North-East-Down |
| NLSEF | Non-linear State Error Feedback |
| PID | Proportion-Integration-Differentiation |
| PD | Proportion-Differentiation |
| PSO | Particle Swarm Optimization |
| PPO | Proximal Policy Optimization |
| PM Spectrum | Pierson-Moskowitz Spectrum |
| QP | Quadratic Programming |
| RANNC | Robust Adaptive Neural Network Control |
| SMC | Sliding Mode Control |
| SK | Station-Keeping |
| TD | Tracking Differentiator |
| The position and angle vector | |
| , | The position vector and angle vector respectively |
| The positions (m) | |
| The angles (deg) | |
| The speed vector | |
| , | The linear speed vector and angular speed vector respectively |
| The linear speed (m/s) | |
| The angular speed (deg/s) | |
| , | The rotation matrices |
| The total thrust and moment generated by thrusters | |
| The force (kN) and moment (kN·m) of thrusters | |
| The external environmental disturbance force and moment | |
| The force and moment of wind and wave | |
| The total inertia matrix | |
| The inertia matrix of the hydrodynamic system and the inertia matrix of the rigid body system | |
| The damping matrix | |
| The Coriolis-centripetal force matrix | |
| The absolute wind speed, the average wind speed, the relative wind speed and the speed of ship (m/s) | |
| The wind direction and the ship direction (deg) | |
| The drift angle (deg) | |
| The force and moment of wind in three directions | |
| The empirical force and moment coefficients | |
| The density of air (kg/m3) | |
| The transverse and lateral projected areas (m2) | |
| The overall length of the ship (m) | |
| The gravitational acceleration (m/s2) | |
| The wave frequency of the i-th wave (Hz) | |
| The wave height (m) | |
| The density of sea (kg/m3) | |
| The encounter angle (deg) | |
| The wave amplitude (m) | |
| The coefficient obtained by regression analysis |
References
- Wang, S.; Yang, X.; Wang, Z.; Guo, L. Summary of Research on Related Technologies of Ship Dynamic Positioning System. E3S Web. Conf. 2021, 233, 04032. [Google Scholar] [CrossRef]
- Veksler, A.; Johansen, T.A.; Borrelli, F.; Realfsen, B. Dynamic Positioning with Model Predictive Control. IEEE Trans. Control Syst. Technol. 2016, 24, 1340–1353. [Google Scholar] [CrossRef] [Green Version]
- Hu, K.; Ding, Y.; Wang, H.; Xiong, D. Analysis of Capability Requirement of Dynamic Positioning System for Cargo Transfer Vessel at Sea. J. Mar. Sci. Appl. 2019, 18, 205–212. [Google Scholar] [CrossRef]
- Fossen, T.I. A survey on Nonlinear Ship Control: From Theory to Practice. IFAC Proc. Vol. 2000, 33, 1–16. [Google Scholar] [CrossRef]
- Yuh, J. Design and Control of Autonomous Underwater Robots: A survey. Auton. Robot. 2000, 8, 7–24. [Google Scholar] [CrossRef]
- Smallwood, D.A.; Whitcomb, L.L. Model-based dynamic positioning of underwater robotic vehicles: Theory and experiment. IEEE J. Ocean. Eng. 2004, 29, 169–186. [Google Scholar] [CrossRef]
- Sørensen, A.J. A survey of dynamic positioning control systems. Annu. Rev. Control 2011, 35, 123–136. [Google Scholar] [CrossRef]
- Mehrzadi, M.; Terriche, Y.; Su, C.; Bin, M.; Guerrero, J.M. Review of Dynamic Positioning Control in Maritime Microgrid Systems. Energies 2020, 13, 3188. [Google Scholar] [CrossRef]
- Xu, S.; Wang, X.; Yang, J.; Wang, L. A fuzzy rule-based PID controller for dynamic positioning of vessels in variable environmental disturbances. J. Mar. Sci. Technol. 2020, 25, 914–924. [Google Scholar] [CrossRef]
- Zhang, D.; Ashraf, M.A.; Liu, Z.; Peng, W.X.; Mosavi, A. Dynamic modeling and adaptive controlling in GPS-intelligent buoy (GIB) systems based on neural-fuzzy networks. Ad Hoc Netw. 2020, 103, 102149. [Google Scholar] [CrossRef] [Green Version]
- Øvereng, S.S.; Nguyen, D.T.; Hamre, G. Dynamic Positioning using Deep Reinforcement Learning. Ocean Eng. 2021, 235, 109433. [Google Scholar] [CrossRef]
- Ryalat, M.; Damiri, H.S.; EIMoaqet, H. Particle Swarm Optimization of a Passivity-Based Controller for Dynamic Positioning of Ships. Appl. Sci. 2020, 10, 7314. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, X.; Wei, Y.; Hu, X. Anti-disturbance control for dynamic positioning system of ships with disturbances. Appl. Math. Comput. 2021, 396, 125929. [Google Scholar] [CrossRef]
- Xia, G.; Liu, C.; Zhao, B.; Chen, X.; Shao, X. Finite Time Output Feedback Control for Ship Dynamic Positioning Assisted Mooring Positioning System with Disturbances. Int. J. Control Autom. Syst. 2019, 17, 2948–2960. [Google Scholar] [CrossRef]
- Li, W.; Sun, Y.; Chen, H.; Wang, G. Model predictive controller design for ship dynamic positioning system based on state-space equations. J. Mar. Sci. Technol. 2017, 22, 426–431. [Google Scholar] [CrossRef]
- Zheng, H.; Negenborn, R.R.; Lodewijks, G. Trajectory tracking of autonomous vessels using model predictive control. IFAC Proc. Vol. 2014, 47, 8812–8818. [Google Scholar] [CrossRef] [Green Version]
- Tiwari, K.; Krishnankutty, P. Comparison of PID and LQR Controllers for Dynamic Positioning of an Oceanographic Research Vessel. In Proceedings of the Fifth International Conference in Ocean Engineering (ICOE2019); Sundar, V., Sannasiraj, S.A., Eds.; Springer: Singapore, 2021; Volume 106, pp. 343–354. [Google Scholar]
- Ashrafiuon, H.; Muske, K.R.; Mcninch, L.C.; Soltan, R.A. Sliding-mode tracking control of surface vessels. IEEE Trans.Ind. Electron. 2008, 55, 4004–4012. [Google Scholar] [CrossRef]
- Ashrafiuon, H.; Muske, K.R. Sliding mode tracking control of surface vessels. In Proceedings of the 2008 American Control Conference, Washington, DC, USA, 11–13 June 2008. [Google Scholar]
- Tannuri, E.A.; Agostinho, A.C.; Morishita, H.M.; Moratelli, L. Dynamic positionning systems: An experimental analysis of sliding mode control. Control Eng. Pract. 2010, 18, 1121–1132. [Google Scholar] [CrossRef]
- Alattas, K.A.; Mobayen, S.; Din, S.U.; Asad, J.H.; Fekih, A.; Assawinchaichote, W.; Vu, A.M.T. Design of a Non-Singular Adaptive Integral-Type Finite Time Tracking Control for Nonlinear Systems with External Disturbances. IEEE Access 2021, 9, 102091–102103. [Google Scholar] [CrossRef]
- Vu, M.T.; Thanh, H.L.N.N.; Huynh, T.T.; Do, Q.T.; Do, T.D.; Hoang, Q.D.; Le, T.H. Station-keeping control of a hovering over-actuated autonomous underwater vehicle under ocean current effects and model uncertainties in the horizontal plane. IEEE Access 2021, 9, 6855–6867. [Google Scholar] [CrossRef]
- Vu, M.T.; Le, T.H.; Thanh, H.L.N.N.; Huynh, T.T.; Van, M.; Hoang, Q.D.; Do, T.D. Robust Position Control of an Over-actuated Underwater Vehicle under Model Uncertainties and Ocean Current Effects Using Dynamic Sliding Mode Surface and Optimal Allocation Control. Sensors 2021, 21, 747. [Google Scholar] [CrossRef] [PubMed]
- Piao, Z.; Guo, C.; Sun, S. Adaptive Backstepping Sliding Mode Dynamic Positioning System for Pod Driven Unmanned Surface Vessel Based on Cerebellar Model Articulation Controller. IEEE Access 2020, 8, 48314–48324. [Google Scholar] [CrossRef]
- Hu, Y.; Park, G.K.; Wu, H.; Zhang, Q. Robust Adaptive Fuzzy Design for Ship Linear-tracking Control with Input Saturation. Int. J. E-Navi. Marit. Econ. 2017, 6, 9–16. [Google Scholar] [CrossRef]
- Zhao, J.; Du, J.; Yu, S.; Liu, Y. Adaptive nonlinear controller design for course-tracking of ships based on dynamic surface control and backstepping. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012. [Google Scholar]
- Li, J.; Xiang, X.; Yang, S. Robust adaptive neural network control for dynamic positioning of marine vessels with prescribed performance under model uncertainties and input saturation. Neurocomputing 2022, 484, 1–12. [Google Scholar] [CrossRef]
- Du, J.; Hu, X.; Liu, H.; Chen, C.L. Adaptive Robust Output Feedback Control for a Marine Dynamic Positioning System Based on a High-Gain Observer. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 2775–2786. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics AS: Trondheim, Norway, 2002. [Google Scholar]
- Du, J.; Yang, Y.; Wang, D.; Guo, C. A robust adaptive neural networks controller for maritime dynamic positioning system. Neurocomputing 2013, 110, 128–136. [Google Scholar] [CrossRef]
- Hu, X.; Du, J.; Shi, J. Adaptive fuzzy controller design for dynamic positioning system of vessels. Appl. Ocean Res. 2015, 53, 46–53. [Google Scholar] [CrossRef]
- Peng, X.; Zhang, B.; Rong, L. A robust unscented Kalman filter and its application in estimating dynamic positioning ship motion states. J. Mar. Sci. Technol. 2019, 24, 1265–1279. [Google Scholar] [CrossRef]
- Ngongi, W.E.; Du, J.; Wang, R. Design of generalised predictive controller for dynamic positioning system of surface ships. Int. Syst. Technol. Appl. 2020, 19, 17–35. [Google Scholar]
- Gao, Q.; Song, L.; Yao, J. RANS Prediction of Wave-Induced Ship Motions, and Steady Wave Forces and Moments in Regular Waves. J. Mar. Sci. Eng. 2021, 9, 1459. [Google Scholar] [CrossRef]
- Borkowski, P. Numerical Modeling of Wave Disturbances in the Process of Ship Movement Control. Algorithms 2018, 11, 130. [Google Scholar] [CrossRef] [Green Version]
- Isherwood, R.M. Wind resistance of merchant ships. Int. J. Marit. Eng. 1972, 114, 327–338. [Google Scholar]
- Wang, B.; Yang, J.; Jiao, H.; Zhu, K.; Chen, Y. Design of auto disturbance rejection controller for train traction control system based on artificial bee colony algorithm. Measurement 2020, 160, 107812. [Google Scholar] [CrossRef]
- Han, J. Active Disturbance Rejection Control Technique-the Technique for Estimating and Compensating the Uncertainties, 1st ed.; National Defense Industry Press: Beijing, China, 2008; pp. 97–107. (In Chinese) [Google Scholar]
- Han, J. From PID to Active Disturbance Rejectio Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Xie, H. Absolute Stability Theory and Application; Science Press: Beijing, China, 1986. (In Chinese) [Google Scholar]
- Ye, Y.; Bai, M.; Zhang, Z.; Qiu, W.; Rui, L. A design of dredger cutter motor synchronous speed control system based on ADRC. In Proceedings of the 28th Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016. [Google Scholar]
- Hu, J.; Ge, Y.; Zhou, X.; Liu, S.; Wu, J. Research on the course control of USV based on improved ADRC. Syst. Sci. Control Eng. 2020, 9, 44–51. [Google Scholar] [CrossRef]
- Wu, Z.; Gao, Z.; Li, D.; Chen, Y.; Liu, Y. On transitioning from PID to ADRC in thermal power plants. Control Theory Technol. 2021, 19, 3–18. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, Y.; Ding, F. Improved ADRC control strategy in FPSO dynamic positioning control application. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016. [Google Scholar]
- Lei, Z.; Guo, C. Noise suppression by ADRC for ship positioning and yaw control. In Proceedings of the 32nd Chinese Control Conference (CCC), Xi’an, China, 26–28 July 2013. [Google Scholar]
- Dong, Z.; Zhang, J. An active disturbance rejection controller design for ball and plate system. In Proceedings of the 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Ye, B.; Xiong, J.; Wang, Q.; Luo, Y. Design and Implementation of Pseudo-Inverse Thrust Allocation Algorithm for Ship Dynamic Positioning. IEEE Access 2020, 8, 16830–16837. [Google Scholar] [CrossRef]
- Wang, B. ROV Dynamic Positioning. In Encyclopedia of Ocean Engineering; Cui, W., Fu, S., Hu, Z., Eds.; Springer: Singapore, 2020; pp. 1–8. [Google Scholar]
- Zheng, Q.; Chen, Z.; Gao, Z. A practical approach to disturbance decoupling control. Control Eng. Pract. 2009, 17, 1016–1025. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Wang, X.; Xiao, J. Ship dynamic positioning system based on backstepping control. J. Theor. Appl. Inf. Technol. 2013, 51, 129–136. [Google Scholar]
- Jin, Z.; Zhang, W.; Liu, S.; Gu, M. Command-Filtered Backstepping Integral Sliding Mode Control with Prescribed Performance for Ship Roll Stabilization. Appl. Sci. 2019, 9, 4288. [Google Scholar] [CrossRef] [Green Version]
- Song, Y.; Xu, R.; Wang, Q.; Song, Z.; Zhao, B.; Zhang, M. Study on Ship Dynamic Positioning with Stochastic Backstepping Nonlinear Controller. In Proceedings of the 2019 Chinese Control and Decision Conference (CCDC), Nanchang, China, 3–5 June 2019. [Google Scholar]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley and Sons: Chichester, UK, 1994; pp. 57–67. [Google Scholar]
- Ahmed, S.; Sultana, Q.; Deergha Rao, K. Comparative analysis of DGPS predicted corrections using dynamic neural networks. In Proceedings of the 2014 IEEE International Conference on Vehicular Electronics and Safety, Hyderabad, India, 16–17 December 2014. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entry | Data |
|---|---|
| Ship Length | 76.2 m |
| Ship Width | 18.8 m |
| Ship Height | 82.5 m |
| Draft | 6.25 m |
| Displacement | 4200 t |
| Power | 3533 kW |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Chen, H.; Gao, N.; AΪT-Ahmed, N.; Charpentier, J.-F.; Benbouzid, M. Ship Dynamic Positioning Control Based on Active Disturbance Rejection Control. J. Mar. Sci. Eng. 2022, 10, 865. https://doi.org/10.3390/jmse10070865
Li H, Chen H, Gao N, AΪT-Ahmed N, Charpentier J-F, Benbouzid M. Ship Dynamic Positioning Control Based on Active Disturbance Rejection Control. Journal of Marine Science and Engineering. 2022; 10(7):865. https://doi.org/10.3390/jmse10070865
Chicago/Turabian StyleLi, Hongliang, Hao Chen, Ning Gao, Nadia AΪT-Ahmed, Jean-Frederic Charpentier, and Mohamed Benbouzid. 2022. "Ship Dynamic Positioning Control Based on Active Disturbance Rejection Control" Journal of Marine Science and Engineering 10, no. 7: 865. https://doi.org/10.3390/jmse10070865
APA StyleLi, H., Chen, H., Gao, N., AΪT-Ahmed, N., Charpentier, J.-F., & Benbouzid, M. (2022). Ship Dynamic Positioning Control Based on Active Disturbance Rejection Control. Journal of Marine Science and Engineering, 10(7), 865. https://doi.org/10.3390/jmse10070865