
Back Projection Algorithm for Multi-Receiver Synthetic Aperture Sonar Based on Two Interpolators



Abstract
1. Introduction
2. Multi-Receiver SAS Signal Model
3. BP Algorithm
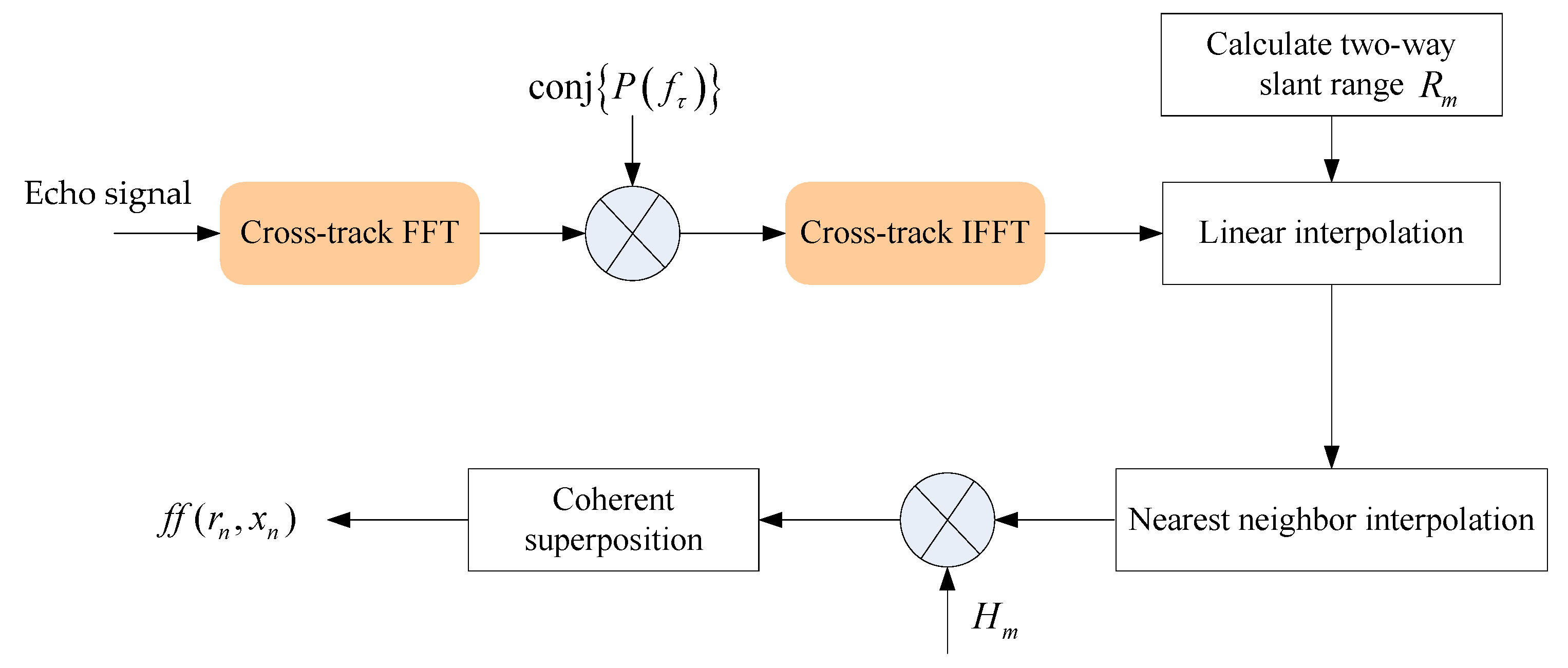
3.1. Presented Method
3.2. Computation Load
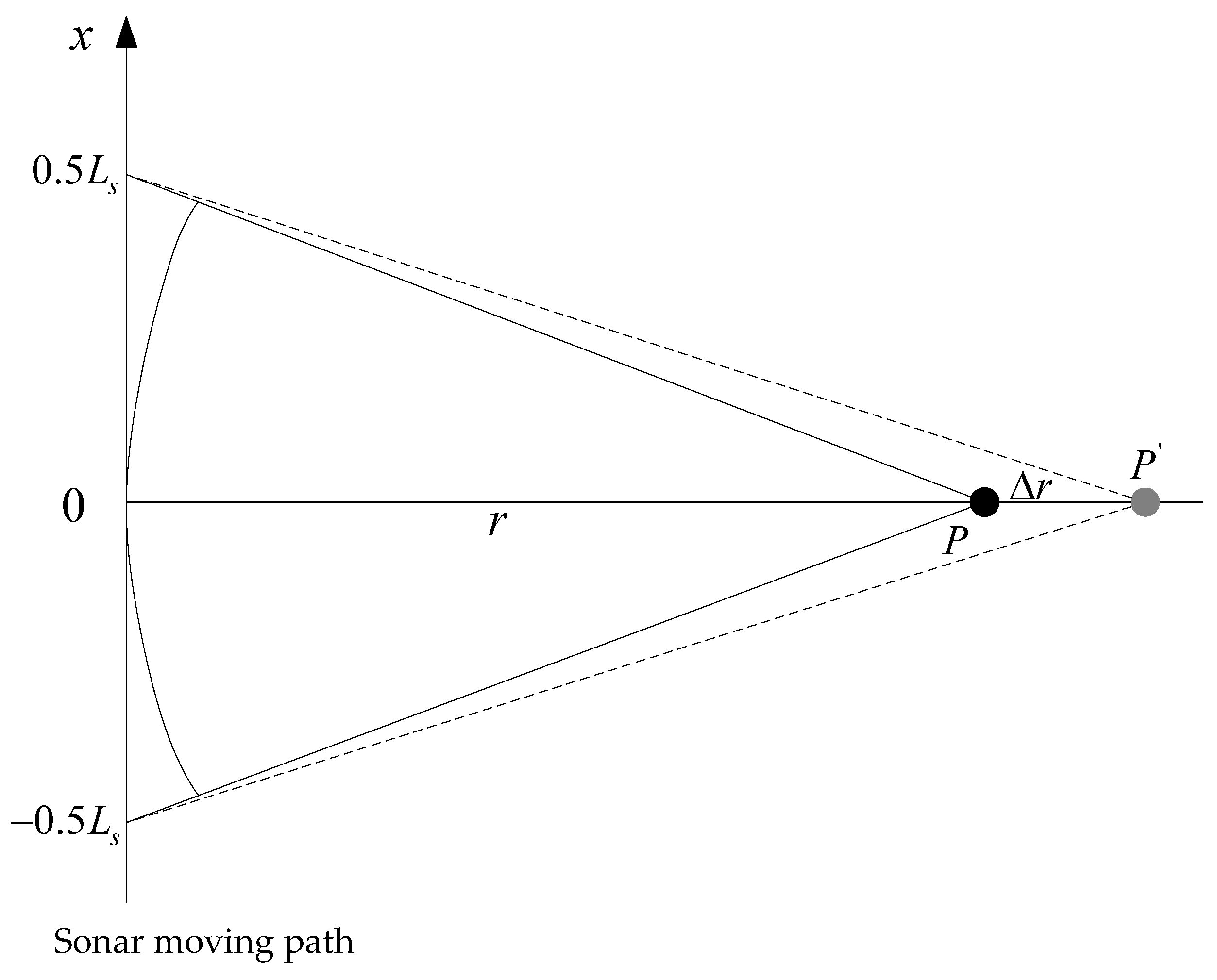
3.3. Discussion of Upsampling Rate
4. Simulations and Experiments
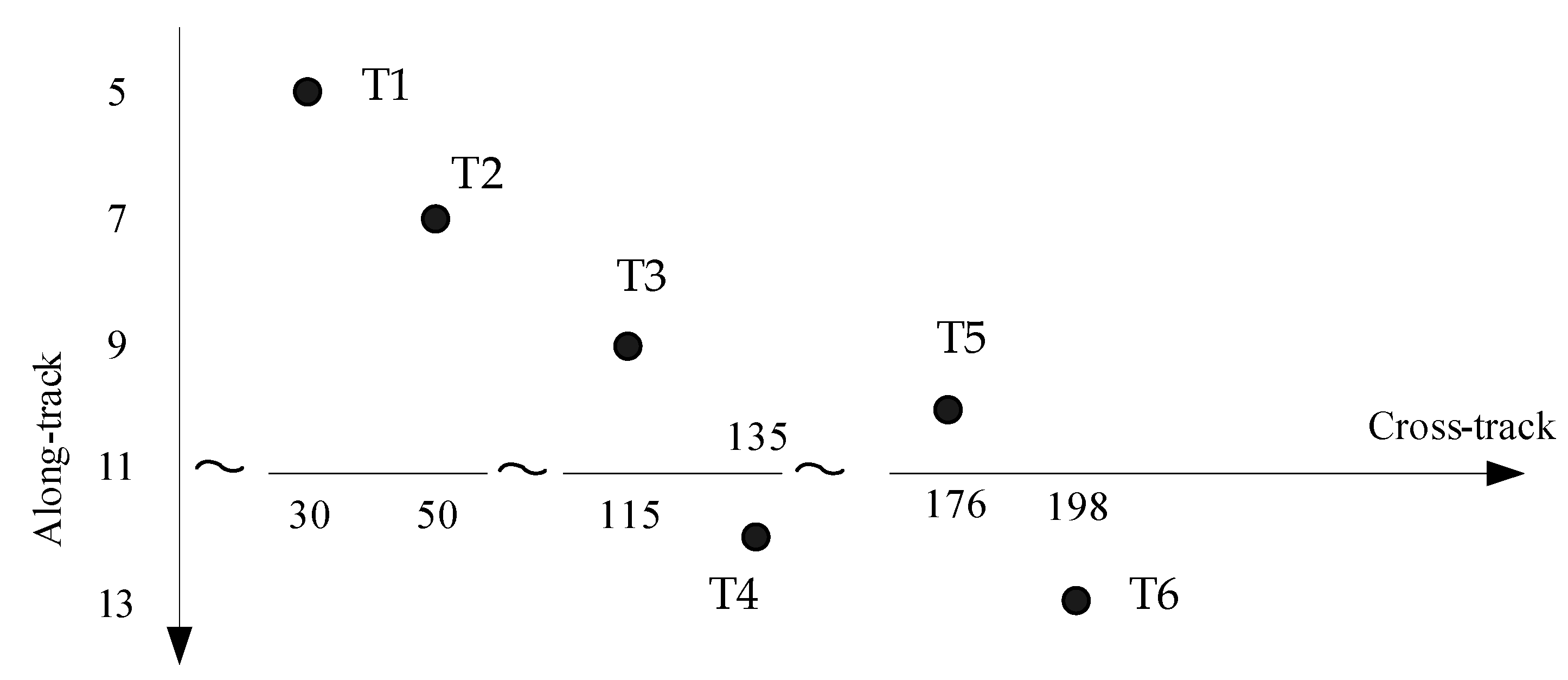
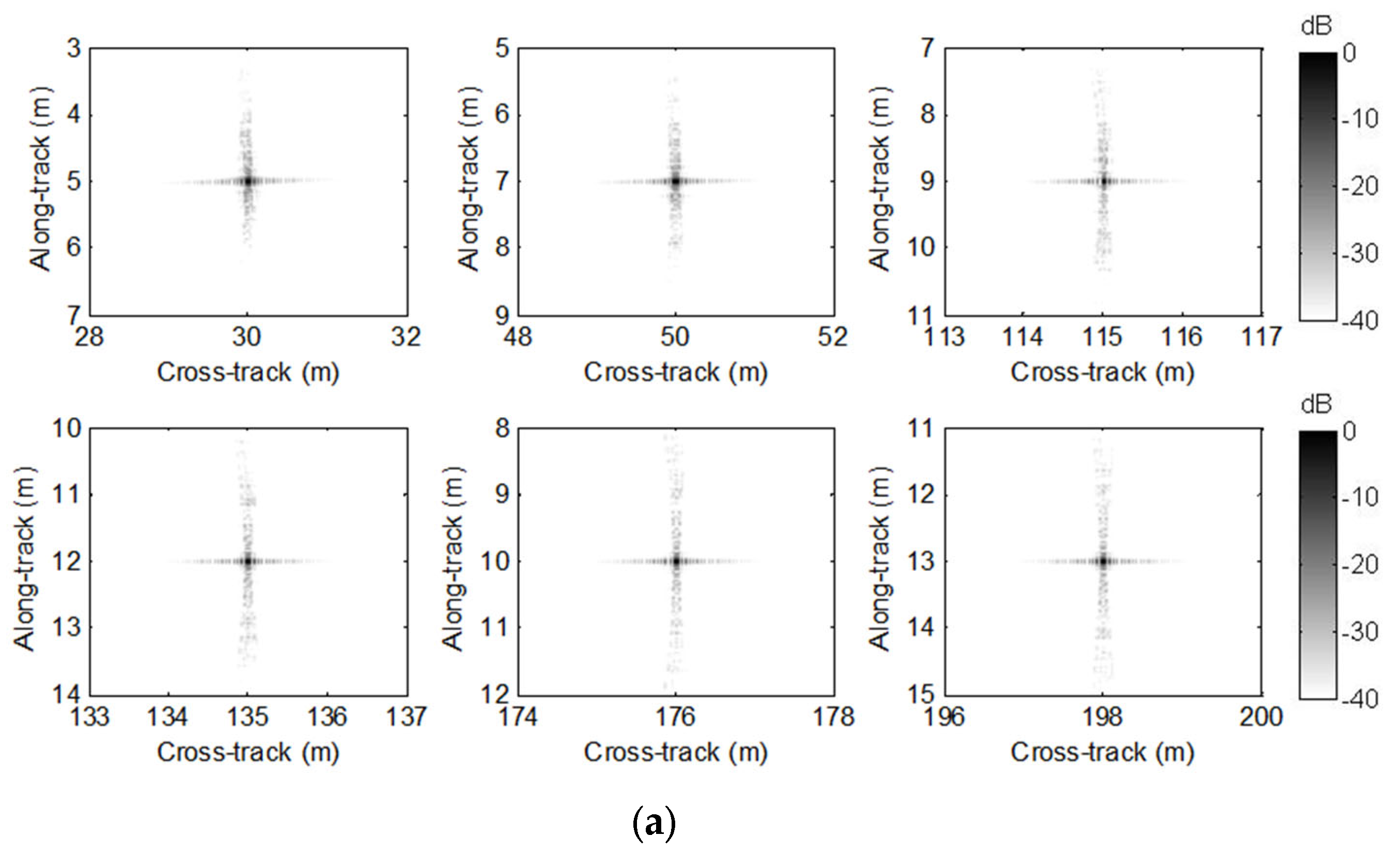
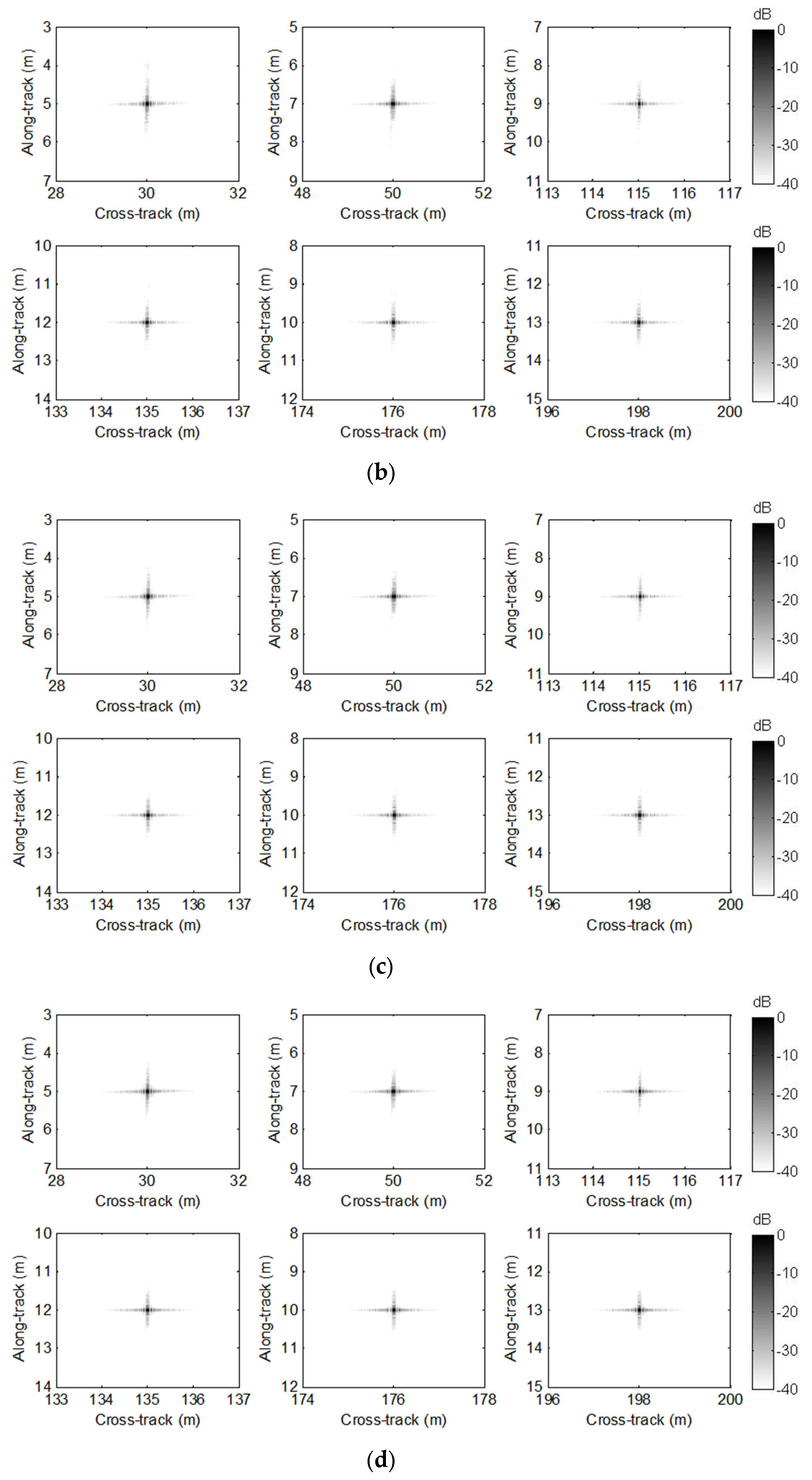
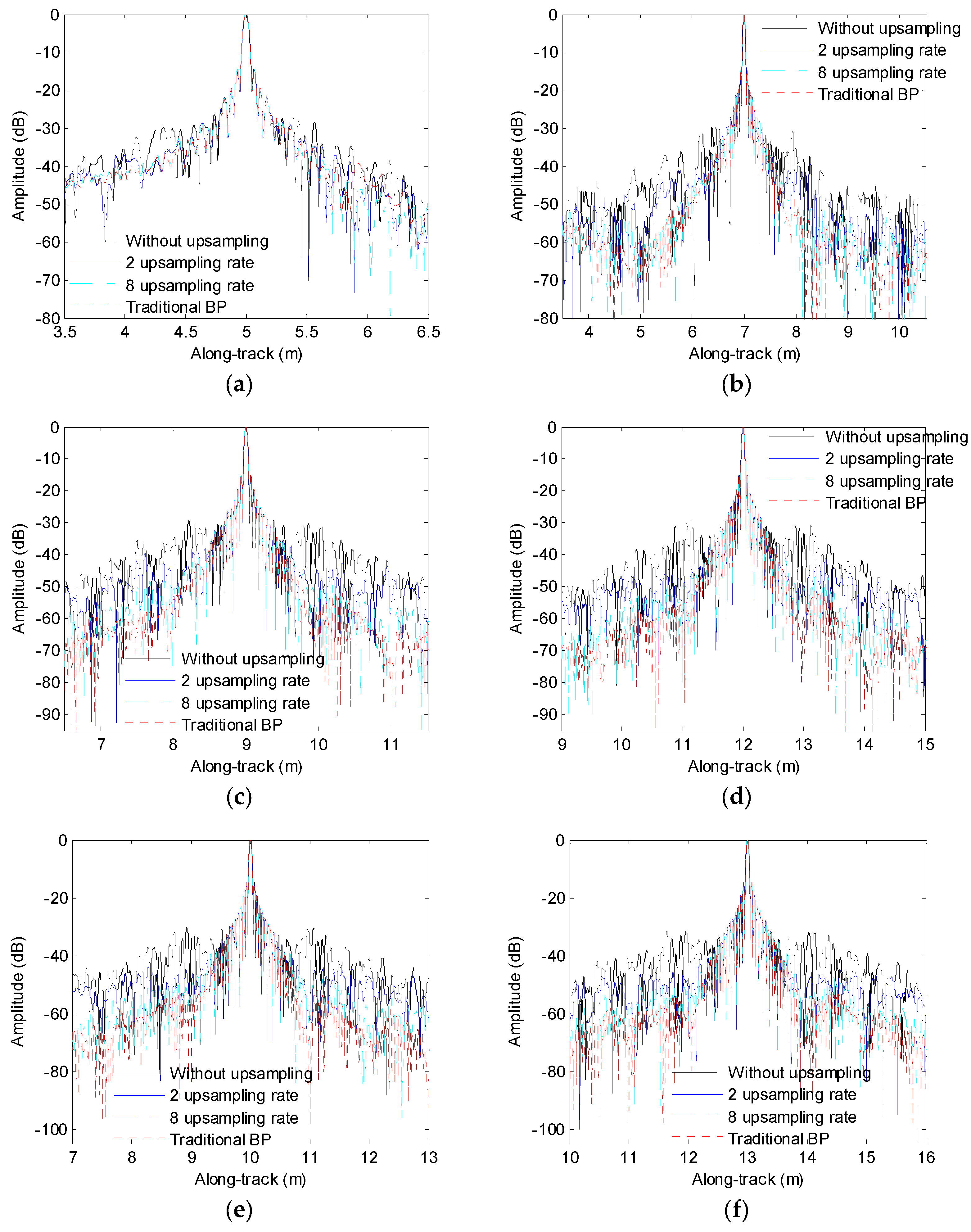
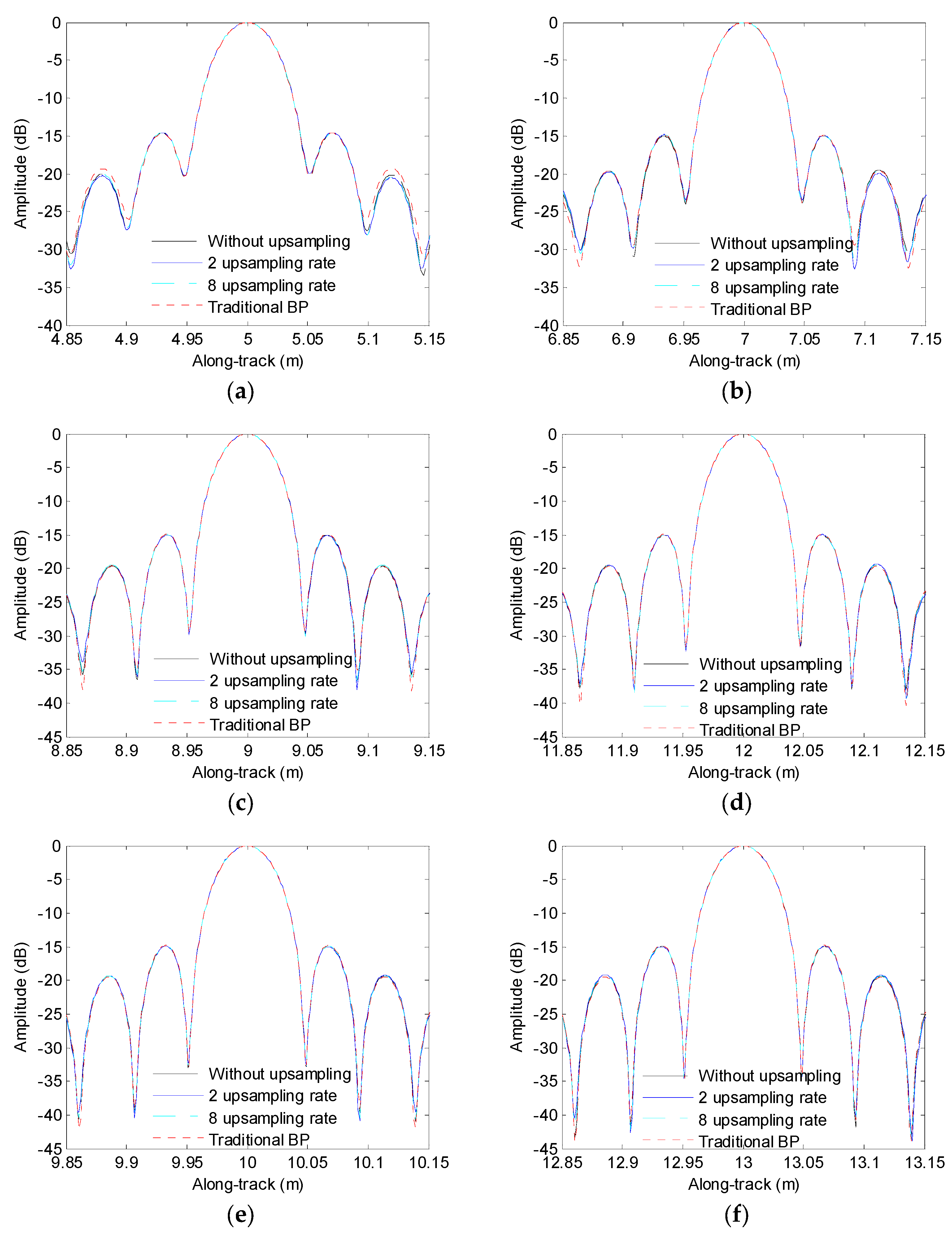
4.1. Simulated Data Processing
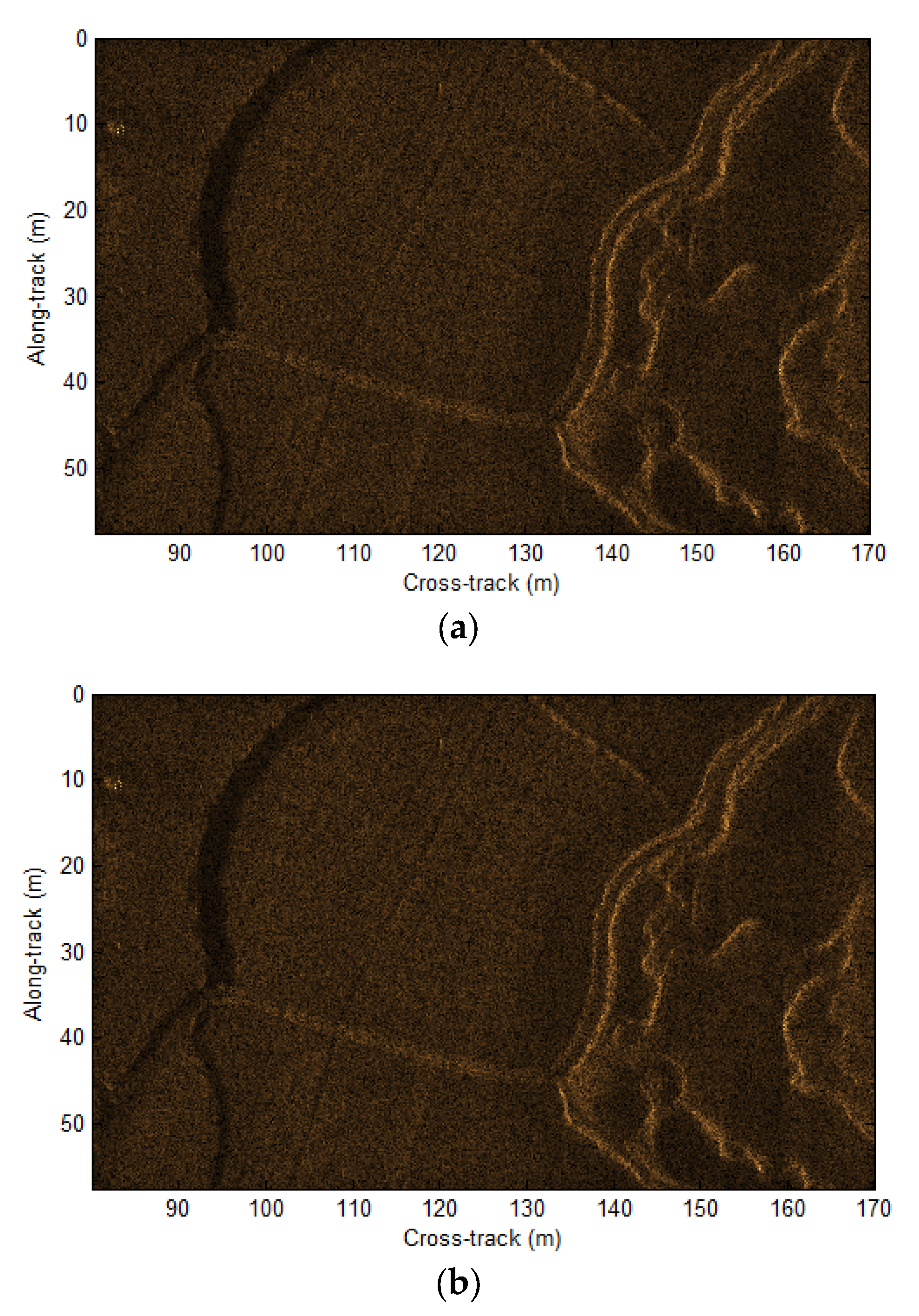
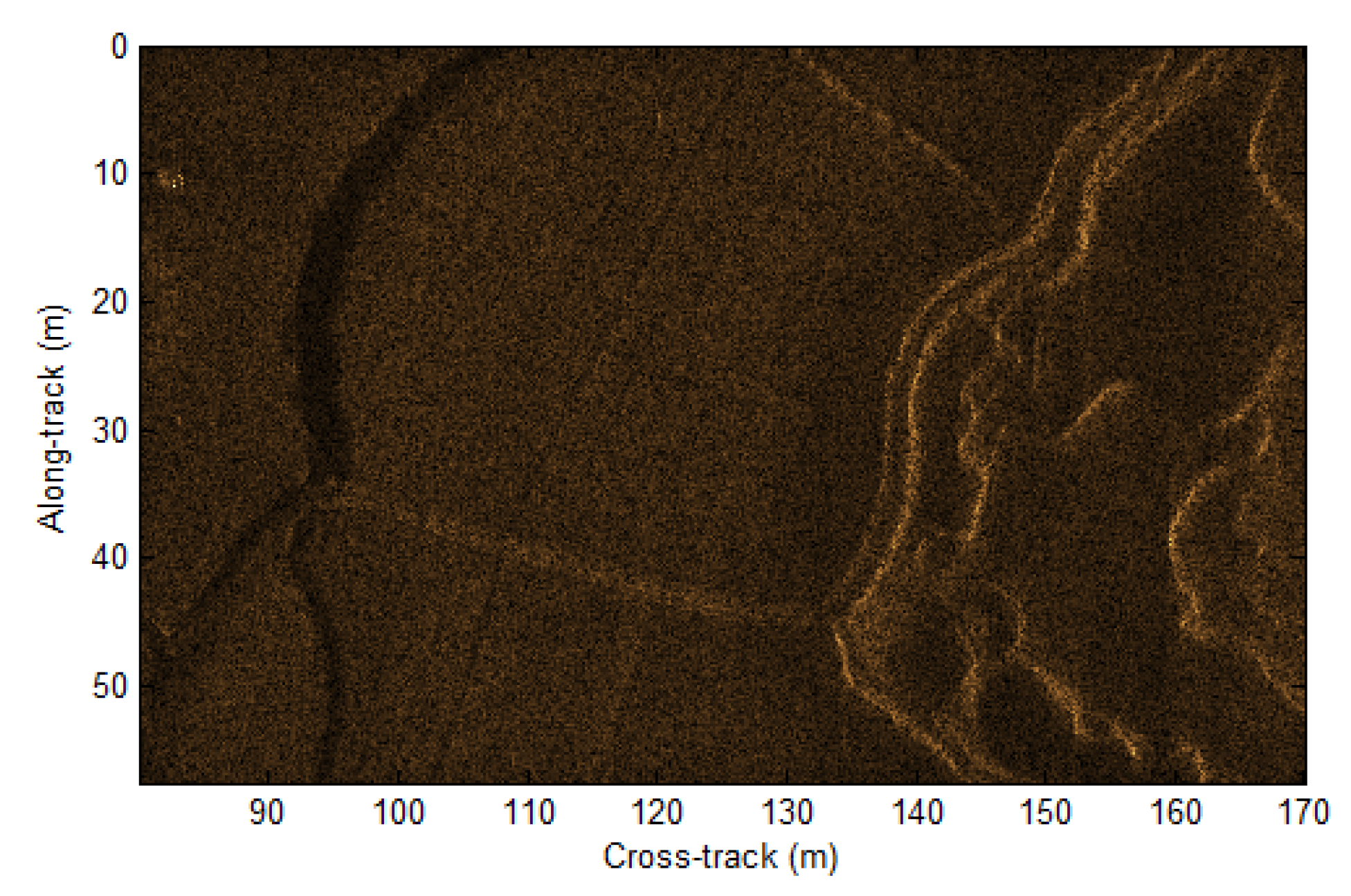
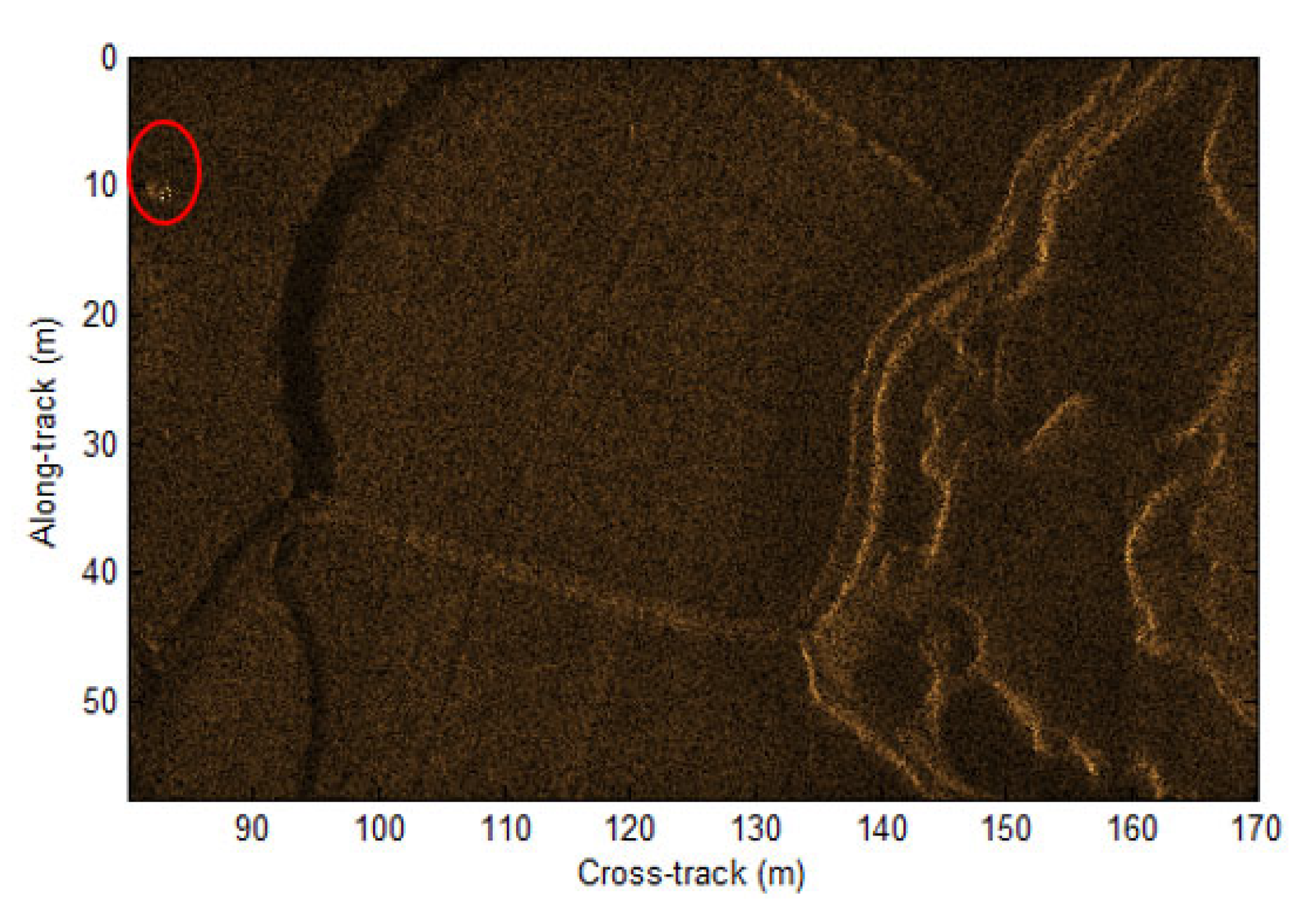
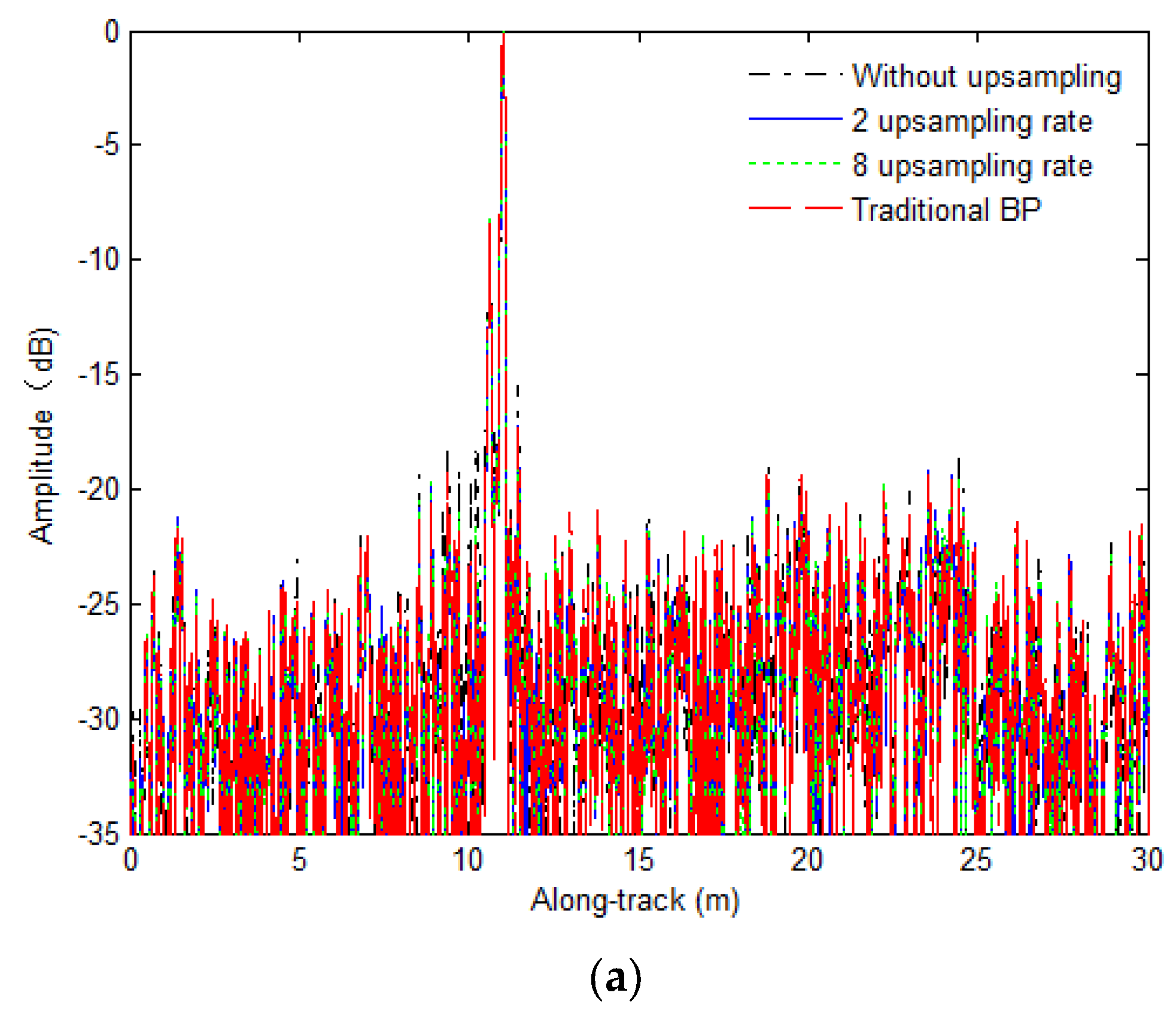
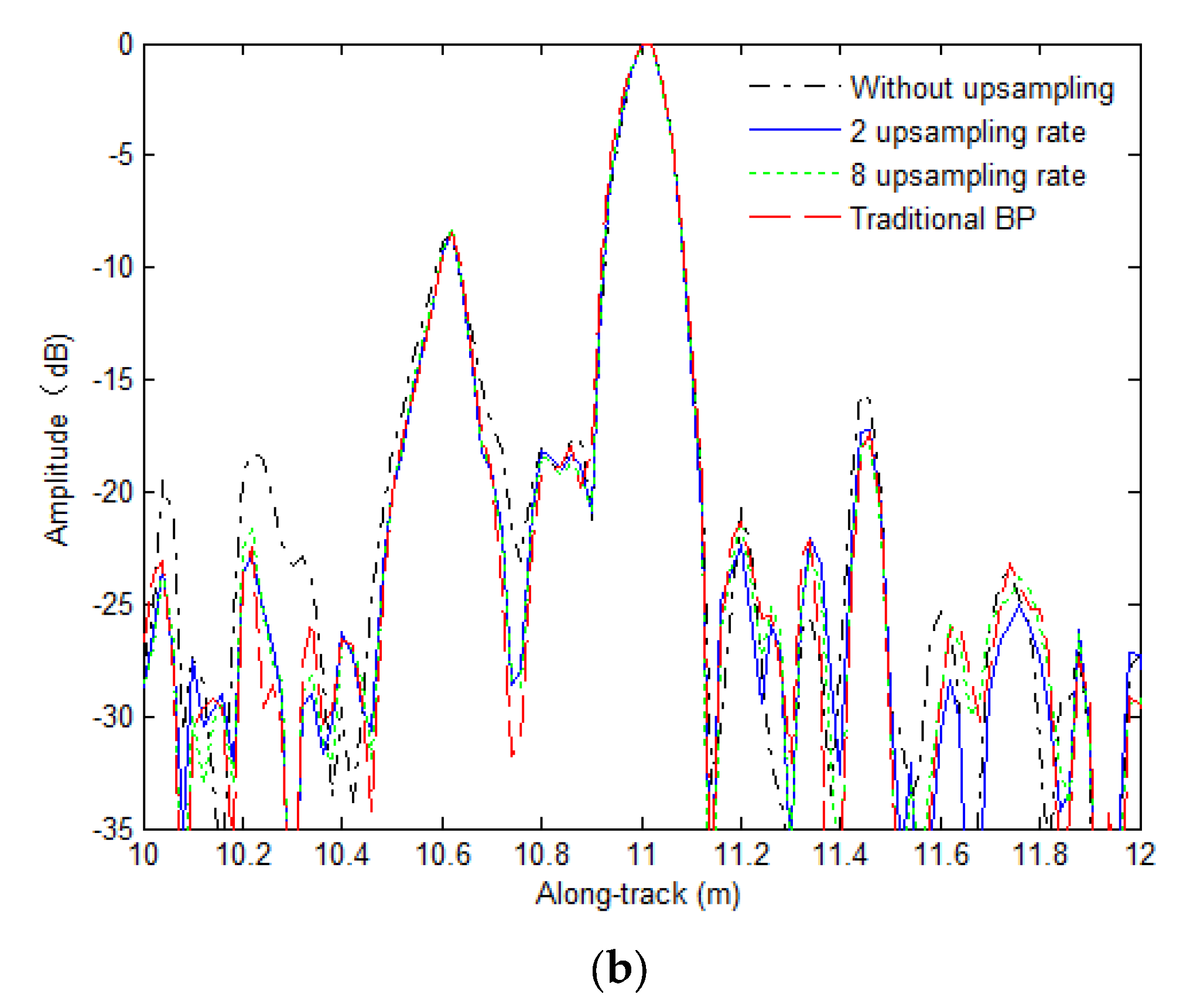
4.2. Real Data Processing
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rolt, K.D. Ocean, Platform, and Signal Processing Effects on Synthetic Aperture Sonar Performance; Massachusetts Institute of Technology: Cambridge, MA, USA, 1991. [Google Scholar]
- Pailhas, Y.; Dugelay, S.; Capus, C. Impact of temporal Doppler on synthetic aperture sonar imagery. J. Acoust. Soc. Am. 2018, 143, 318–329. [Google Scholar] [CrossRef]
- Tan, C.; Zhang, X.; Yang, P.; Sun, M. A novel sub-bottm profiler and signal processor. Sensors 2019, 19, 5052. [Google Scholar] [CrossRef]
- Maurya, H.; Kumar, A.; Mishra, A.K.; Panigrahi, R.K. Improved four-component based polarimetric synthetic aperture radar image decomposition. IET Radar Sonar Navig. 2020, 14, 619–627. [Google Scholar] [CrossRef]
- Nithirochananont, U.; Antoniou, M.; Chemiakov, M. Passive coherent multistatic SAR using spaceborne illuminators. IET Radar Sonar Navig. 2020, 14, 628–636. [Google Scholar] [CrossRef]
- Zhang, X.; Gu, H.; Su, W. Squint-minimised chirp scaling algorithm for bistatic forward-looking SAR imaging. IET Radar Sonar Navig. 2020, 14, 290–298. [Google Scholar] [CrossRef]
- AlShaya, M.; Yaghoobi, M.; Mulgrew, B. Ultrahigh resolution wide swath MIMO-SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5358–5368. [Google Scholar] [CrossRef]
- Pirrone, D.; Bovolo, F.; Bruzzone, L. An approach to unsupervised detection of fully and partially destroyed buildings in multitemporal VHR SAR images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5938–5953. [Google Scholar] [CrossRef]
- Wijayasiri, A.; Banerjee, T.; Ranka, S.; Sahni, S.; Schmalz, M. Multiobjective optimization of SAR reconstruction on hybrid multicore systems. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 4674–4688. [Google Scholar] [CrossRef]
- Corbett, B.; Andre, D.; Finnis, M. Localising vibrating scatterer phenomena in synthetic aperture radar imagery. Electron. Lett. 2020, 56, 395–398. [Google Scholar] [CrossRef]
- Hashempour, H.R. Fast ADMM-based approach for high-resolution ISAR imaging. Electron. Lett. 2020, 56, 954–957. [Google Scholar] [CrossRef]
- Saqueb, S.; Nahar, N.K.; Sertel, K. Fast two-dimensional THz imaging using rail-based synthetic aperture radar (SAR) processing. Electron. Lett. 2020, 56, 988–990. [Google Scholar] [CrossRef]
- Yang, J.; Qiu, X.; Zhong, L.; Shang, M.; Ding, C. A simultaneous imaging scheme of stationary clutter and moving targets for maritime scenarios with the first Chinese dual-channel spaceborne SAR sensor. Remote Sens. 2019, 11, 2275. [Google Scholar] [CrossRef]
- Loffeld, O.; Nies, H.; Peters, V.; Knedlik, S. Models and useful relations for bistatic SAR processing. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2031–2038. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, P. An improved imaging algorithm for multireceiver SAS system with wide-bandwidth signal. Remote Sens. 2021, 13, 5008. [Google Scholar] [CrossRef]
- Rosu, F.; Anghel, A.; Cacoveanu, R.; Rommen, B.; Datcu, M. Multiaperture focusing for spaceborne transmitter/ground-based receiver bistatic SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 5823–5832. [Google Scholar] [CrossRef]
- Callow, H.J. Signal Processing for Synthetic Aperture Sonar Image Enhancement; University of Canterbury: Christchurch, New Zealand, 2003. [Google Scholar]
- Gough, P.T.; Hayes, M.P. Fast Fourier techniques for SAS imagery. In Proceedings of the MTS/IEEE Oceans Conference, Brest, France, 20–23 June 2005; pp. 563–568. [Google Scholar]
- Zhang, X.; Wu, H.; Sun, H.; Ying, W. Multireceiver SAS imagery based on monostatic conversion IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10835–10853. [Google Scholar] [CrossRef]
- Bonifant, W.W.; Richards, M.; McClellan, J. Interferometric height estimation of the seafloor via synthetic aperture sonar in the presence of motion errors. IEE Proc. Radar Sonar Navig. 2000, 147, 322–330. [Google Scholar] [CrossRef]
- Vu, V.T.; Sjogren, T.K.; Pettersson, M.I. Two-dimensional spectrum for BiSAR derivation based on Lagrange inversion theorem. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1210–1214. [Google Scholar] [CrossRef]
- Neo, Y.L.; Wong, F.; Cumming, I.G. A two-dimensional spectrum for bistatic SAR processing using series reversion. IEEE Geosci. Remote Sens. Lett. 2007, 4, 93–96. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, P.; Dai, X. Focusing the multireceiver SAS data based on the fourth order Legendre expansion. Circuits Syst. Signal Process. 2019, 38, 2607–2629. [Google Scholar] [CrossRef]
- Wu, J.J.; Yang, J.Y.; Huang, Y.L.; Liu, Z.; Yang, H.G. A new look at the point target reference spectrum for bistatic SAR. Prog. Electromagn. Res. 2011, 119, 363–379. [Google Scholar] [CrossRef][Green Version]
- Wang, F.; Li, X. A new method of deriving spectrum for bistatic SAR processing. IEEE Geosci. Remote Sens. Lett. 2010, 7, 483–486. [Google Scholar] [CrossRef]
- Yang, H.L.; Tang, J.S.; Li, Q.H.; Liu, X.D. A robust multiple-receiver Range-Doppler algorihtm for synthetic aperture sonar imagery. In Proceedings of the MTS/IEEE Oceans Conference, Aberdeen, UK, 18–21 June 2007; pp. 1–5. [Google Scholar]
- Bamler, R.; Meyer, F.; Liebhart, W. Processing of bistatic SAR data from quasi-stationary configurations. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3350–3358. [Google Scholar] [CrossRef]
- Duersch, M.I. Backprojection for Synthetic Aperture Radar; Brigham Young University: Provo, UT, USA, 2013. [Google Scholar]
- Wang, X.; Zhang, X.; Zhu, S. Upsampling based back projection imaging algorithm for multi-receiver synthetic aperture sonar. In Proceedings of the 2015 International Industrial Informatics and Computer Engineering Conference (IIICEC), Xi’an, China, 10–11 January 2015; pp. 1610–1615. [Google Scholar]
- Zhang, M.; Wang, G.; Zhang, L. Precise aperture-dependent motion compensation with frequency domain fast back-projection algorithm. Sensors 2017, 17, 2454. [Google Scholar] [CrossRef]
- Cumming, I.; Wong, F. Digtal Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Zhang, X.; Yang, P.; Ying, W. BP algorithm for the multireceiver SAS system. IET Radar Sonar Navig. 2019, 13, 830–838. [Google Scholar] [CrossRef]
- Li, X.; Zhou, S.; Yang, L. A new fast factorized back-projection algorithm with reduced topography sensibility for missile-borne SAR focusing with diving movement. Remote Sens. 2020, 12, 2616. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, C.; Liu, J. Application of FFBP algorithm to synthetic aperture sonar imaging. Tech. Acoust. 2009, 28, 572–576. [Google Scholar]
- Hunter, A.; Hayes, M.; Gough, P. A comparison of fast factorised back-projection and wavenumber algorithms for SAS image reconstruction. In Proceedings of the 5th World Congress on Ultrasonics, Paris, France, 7–10 September 2003; pp. 527–530. [Google Scholar]
- Shippey, G.; Banks, S.; Pihl, J. SAS image reconstruction using fast polar back projection: Comparisons with fast factored back projection and Fourier-domain imaging. In Proceedings of the Europe Oceans 2005, Brest, France, 20–23 June 2005; pp. 96–101. [Google Scholar]
- Wu, S.; Xu, Z.; Wang, F.; Yang, D.S.; Guo, G. An improved back-projection algorithm for GNSS-R BSAR imaging based on CPU and GPU platform. Remote Sens. 2021, 13, 2107. [Google Scholar] [CrossRef]
- Baralli, F.; Couillard, M.; Ortiz, A.; Caldwell, D.G. GPU-based real-time synthetic aperture sonar processing on-board autonomous underwater vehicles. In Proceedings of the 2013 MTS/IEEE Oceans, Bergen, Norway, 10–13 June 2013; pp. 1–8. [Google Scholar]
- Campbell, D.; Cook, D.A. Using graphics processors to accelerate synthetic aperture sonar imaging via backpropagation. In Proceedings of the High Performance Embedded Computing Workshop (HPEC’ 10), MIT Lincoln Laboratory, Lexington, MA, USA, 19–21 September 2010; pp. 1–3. [Google Scholar]
- Fasih, A.; Hartley, T. GPU-accelerated synthetic aperture radar backprojection in CUDA. In Proceedings of the 2010 IEEE Radar Conference, Arlington, VA, USA, 10–14 May 2010; pp. 1408–1413. [Google Scholar]
- Hettiarachchi, D.; Balster, E. Fixed-point processing of the SAR back-projection algorithm on FPGA. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 10889–10902. [Google Scholar] [CrossRef]
- Zhang, C. Synthetic Aperture Radar: Principles, System Analysis and Applications; Science Press: Beijing, China, 1989. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FFT/IFFT | Multiplication | Linear Interpolation | |
|---|---|---|---|
| FLOPs | 6 | 6 | |
| Total number | |||
| Total FLOPs |
| Parameter | Value | Unit |
|---|---|---|
| Platform velocity | 2.5 | m/s |
| Pulse repetition interval | 0.32 | s |
| Signal bandwidth | 15 | kHz |
| Carrier frequency | 150 | kHz |
| Receiver array length | 1.6 | m |
| Receiver width | 0.04 | m |
| Transmitter width | 0.08 | m |
| Method | PLSR (dB) | ISLR (dB) | Target |
|---|---|---|---|
| Nearest interpolation without upsampling | −14.62 | −8.08 | T1 |
| Presented method with upsampling rate of 2 | −14.57 | −8.29 | |
| Presented method with upsampling rate of 8 | −14.58 | −8.32 | |
| Traditional BP | −14.64 | −8.33 | |
| Nearest interpolation without upsampling | −15.01 | −9.40 | T2 |
| Presented method with upsampling rate of 2 | −14.83 | −9.65 | |
| Presented method with upsampling rate of 8 | −14.84 | −9.77 | |
| Traditional BP | −14.87 | −9.84 | |
| Nearest interpolation without upsampling | −15 | −9.62 | T3 |
| Presented method with upsampling rate of 2 | −14.97 | −10.12 | |
| Presented method with upsampling rate of 8 | −15.0 | −10.17 | |
| Traditional BP | −14.89 | −10.2 | |
| Nearest interpolation without upsampling | −15.04 | −9.85 | T4 |
| Presented method with upsampling rate of 2 | −14.98 | −10.28 | |
| Presented method with upsampling rate of 8 | −14.99 | −10.41 | |
| Traditional BP | −14.94 | −10.44 | |
| Nearest interpolation without upsampling | −14.94 | −9.45 | T5 |
| Presented method with upsampling rate of 2 | −14.92 | −9.79 | |
| Presented method with upsampling rate of 8 | −14.88 | −9.93 | |
| Traditional BP | −14.83 | −9.96 | |
| Nearest interpolation without upsampling | −14.95 | −9.52 | T6 |
| Presented method with upsampling rate of 2 | −14.93 | −9.79 | |
| Presented method with upsampling rate of 8 | −14.89 | −9.95 | |
| Traditional BP | −14.83 | −9.98 |
| Nearest Interpolation without Upsampling | Presented Method | Traditional BP | ||
|---|---|---|---|---|
| Upsampling Rate of 2 | Upsampling Rate of 8 | |||
| Processing time/s | 7156 | 7368 | 7420 | 31,276 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Yang, P. Back Projection Algorithm for Multi-Receiver Synthetic Aperture Sonar Based on Two Interpolators. J. Mar. Sci. Eng. 2022, 10, 718. https://doi.org/10.3390/jmse10060718
Zhang X, Yang P. Back Projection Algorithm for Multi-Receiver Synthetic Aperture Sonar Based on Two Interpolators. Journal of Marine Science and Engineering. 2022; 10(6):718. https://doi.org/10.3390/jmse10060718
Chicago/Turabian StyleZhang, Xuebo, and Peixuan Yang. 2022. "Back Projection Algorithm for Multi-Receiver Synthetic Aperture Sonar Based on Two Interpolators" Journal of Marine Science and Engineering 10, no. 6: 718. https://doi.org/10.3390/jmse10060718
APA StyleZhang, X., & Yang, P. (2022). Back Projection Algorithm for Multi-Receiver Synthetic Aperture Sonar Based on Two Interpolators. Journal of Marine Science and Engineering, 10(6), 718. https://doi.org/10.3390/jmse10060718