Abstract
The uncertainty of the arrival time of trucks has increased the complexity of terminal operations. The truck appointment system (TAS) cannot respond to this problem in time, which can easily cause appointment invalidation and reduce the efficiency of truck operations and terminal operations. This paper comprehensively considers the related constraints of truck re-scheduling costs, gate waiting costs, and idle emission costs. With the goal of minimizing the comprehensive operating costs of truck companies and port companies, a dynamic appointment rescheduling model for external trucks based on mixed integer nonlinear programming is established. This paper designs an adaptive quantum revolving door update mechanism and proposes a double-chain real quantum genetic algorithm. The simulation experiment results show that compared with the traditional scheduling, the truck dynamic appointment rescheduling model can effectively reduce the comprehensive operating costs of the truck company and the port company and alleviate the congestion of the port. The probability that the truck cannot arrive at the port on time, the advance time for the truck to confirm the arrival time, and the length of time that the external truck cannot arrive at the port on time have a significant impact on the cost of the reschedule of the TAS. This paper favorably supports the manager’s operational decision-making.
1. Introduction
1.1. Background
The truck appointment system (TAS) can reasonably determine the scheduled arrival time of the external trucks so that the port can fully control the arrival truck volume information before the external trucks arrive at the port and make a better plan for deployment of the terminal operating machinery configuration (which can effectively avoid problems such as congestion during peak periods and waste of resources caused by the centralized arrival of external trucks). However, unexpected traffic jams, bad weather, other trucks, or unexpected conditions of the drivers and other emergencies will cause uncertainty in the actual arrival time of the external trucks. The early or late arrival of the external truck will disrupt the port operation plan planned by the TAS, increase the complexity of the port operation, and increase the cost of the truck companies and port companies. If the TAS can respond in time when the arrival time of the external truck is uncertain, it can effectively reduce the impact of the uncertainty of the arrival time of the external truck on the system.
1.2. Research Significance
As an important means of transportation for cargo distribution between ports and land companies, trucks will directly affect the operating efficiency of port companies and trucking companies. Too long queues of trucks at gates, yards, and other links will affect the turnaround time of trucks in the port and even affect urban traffic in severe cases. This not only results in a waste of time but also a waste of environmental resources. Reasonable planning of truck and cargo scheduling time can alleviate port congestion, improve the overall operational efficiency of port companies and truck companies, and achieve a win-win situation for both parties.
1.3. Innovation
- (1)
- This study proposes a re-confirmation strategy which can keep track of the actual arrival time of trucks. For the trucks that cannot arrive at the port on time, a rescheduling strategy is adopted to reduce the comprehensive operating costs of the trucking company and the port company. A model of re-booking and rescheduling of the trucks when the arrival time is uncertain is established to promote the effect of reservation.
- (2)
- In this study, a double-chain real-quantity quantum genetic algorithm is proposed for the re-scheduling problem of trucks that cannot arrive at the port on time. A double-chain real number encoding method is designed to better represent the reservation status of the set card. At the same time, the quantum revolving gate and mutation are adaptively adjusted to speed up the running time of the entire algorithm.
2. Related Works
The container terminal TAS can effectively alleviate the congestion of external trucks in the port and reduce the turnaround time of external trucks in the port [1], which has been widely used in domestic and foreign terminals. The following current research status of the truck appointment system will be described from the two aspects of the deterministic problem and the uncertainty problem.
2.1. Research on the Deterministic Problems
Abdelmagid et al. [2] presented a comprehensive review and analysis of the literature addressing the external truck appointment scheduling problem and presents possible directions for future research. After explaining the problem and its importance, the reviewed literature is classified into three main categories: control and decision perspectives, modelling methodologies, and collaboration between stakeholders. However, which appointment scheduling rule is the best is still an open question. In order to answer this question, Creemers et al. [3] developed an analytical model to assess the performance from three aspects (customer waiting time, server idle time, and server overtime) of appointment scheduling rules in a wide variety of settings. Torkjazi et al. [4] proposed a novel approach for designing a TAS intended to serve both the marine container terminal operator and drayage operators. The TAS seeks to distribute the truck arrivals evenly throughout the day to avoid gate and yard congestion. The proposed TAS is formulated as a mixed integer nonlinear program (MINLP) and the model is solved by the Lingo commercial software. Due to the long solution time of commercial solvers, it is not suitable for the current problem.
Some researchers use heuristic algorithms to solve the problems related to the truck appointment system: Sanghyuk Yi et al. [5] proposed a truck reservation scheduling method that considers the cost of the truck staying at the terminal, and constructed the reservation schedule while considering the influence of reservation time on port waiting time, solving the problem based on the mathematical formulation of the Frank-Wolfe algorithm and heuristics and comparing the proposed algorithm with other heuristics. Ramírez-Nafarrate et al. [6] analyzed potential configurations of truck booking systems and assessed their impact on yard operations, especially in terms of reducing container handling and truck turnaround time. Thus, a discrete event simulation model and heuristic algorithm are proposed, and experiments are carried out using historical data from port terminals. According to the different operating environments of the port, the model needs to be changed flexibly. At present, most of the relevant heuristic algorithms are solved for the model under study, and the fault tolerance rate of the model is low, so it is difficult to popularize and use.
Intelligent algorithms can also solve problems related to the truck appointment system: Shiri et al. [7] proposed a truck appointment system model, which requires that each truck must load and unload containers at the customer’s location within a specified time window and define it as an extension of the multiple traveling salesman problem with time windows. As a result, a reactive tabu search algorithm is proposed. The solutions obtained by the algorithm show that the developed set card appointment model can determine the optimal solution and solve the running problem in a reasonable time. Kai et al. [8] comprehensively considered the waiting cost of the set card and the penalty cost caused by waiting for timeout, built a mixed integer linear programming model, and conducted benchmark tests through the CPLEX exact solution method, finally designing a rolling time domain algorithm and verifying the effectiveness of the algorithm. Taking the randomness of the outer set card task as the starting point, He et al. [9] proposed a field bridge scheduling problem with uncertain arrival time and processing volume of the task group. By establishing a mathematical model, all of the total delay and extra loss of the estimated end time of the task group are optimized under uncertainty, and finally a solution method based on a three-stage algorithm and a genetic algorithm is designed. At present, there are more and more research studies on related intelligent algorithms, and the effect is getting better and better, which is of great significance for future research. Especially for large-scale problems, the solution time of intelligent algorithms will be greatly reduced, which is one of the reasons for the use of intelligent algorithms in this study.
2.2. Research on the Uncertainty Problem
Due to some uncertain factors, the port operations plan planned by the TAS will be disrupted, the complexity of port operations will increase, and the cost of truck companies and port companies will rise. Therefore, some scholars have made corresponding improvements to TAS in response to these uncertain factors.
Some scholars have considered the unreliability of truck arrival information, the uncertainty of truck loading and unloading operations, random port operations, and land-based interference issues. Kourounioti et al. [10] sought to develop pick-up time-of-day models for import containers using data easily retrieved from terminal operating systems (TOS). The developed time-of-day (TOD) models can be used to calculate the probability of drayage truck arrival times. Sun et al. [11] constructed mixed integer programming optimization model based on the uncertain but detachable characteristics of the external truck loading and unloading operations. Dos Santos et al. [12] pointed out the operational bottlenecks loosen the port-city relationship. One of the main conflicts in this relation is the land port access, which is a hard-to-be-mapped, random operation, so they developed a dynamic model of road port access. The land-side disruption is rarely researched, and Torkjazi et al. [4] addressed the ordinary level of such disruption where typically some truck arrivals deviate from their schedule in the appointment system.
TASs facilitate coordination between container terminals and truck companies. However, in many cases, trucks with an appointment do not arrive at the scheduled appointment. Wasesa et al. [13] proposed an overbooking reservation mechanism (ORM) to alleviate the negative impact of these no-shows. Extending the existing research, Xu et al. [14] considered morning and evening peak congestion and proposes a novel approach for multi-constraint TAS intended to serve both truck companies and container terminals. A mixed integer nonlinear programming (MINLP) based multi-constraint TAS model is formulated, which explicitly considers the appointment change cost, queuing cost, and morning and evening peak congestion cost. In order to alleviate the congestion of trucks in the container terminal queuing, in view of the traditional appointment mechanism that only stipulates the upper limit of the number of trucks arriving at the port and the long-interval appointment period and other static information, Chang et al. [15] established a dynamic reservation feedback mechanism based on the arrival time sequence. An optimization model of the arrival time sequence of the foreign truck is constructed. von Westarp et al. [16] considered the uncertainty of transport demands, transit times, and freight capacities, utilized an exact fuzzy-based exact approaches to solve the container positioning problem, and figured out the trade-off between loaded and empty containers.
It can be seen from the above research on the truck appointment system that the existing research basically optimizes the initial appointment plan of the truck and does not consider the situation that the truck cannot arrive at the port on time. In practice, the trucks may not arrive at the port on time due to some other unexpected circumstances, which will affect the implementation of the initial plan of the truck appointment system and the practical application of the truck appointment system.
Aiming at the above problems, this paper establishes a dynamic truck-appointment re-scheduling model based on mixed integer nonlinear programming which is comprehensively considering the related constraints of truck re-scheduling costs, gate waiting costs, and idle emission costs.
3. Problem Description
The truck reservation system can reasonably determine the scheduled arrival time of the external container trucks, so that the port can obtain the information of the arrival cargo volume before the truck arrives at the port, and can deploy the terminal operation machinery configuration in a more planned way. Existing research has only made relevant optimizations around the uncertainty of the travel time of trucks caused by the impact of urban traffic (e.g., unexpected traffic congestion, bad weather, unexpected conditions of pickup or drivers, etc.), but the occurrence of other unexpected situations will also lead to the uncertainty of the actual arrival time of external container truck. The early or late arrival of the external container truck will disrupt the scheduled port collection operation plan planned by the reservation system, which will not only cause pressure on the port gate, but also increase the complexity of the operation and increasing the cost of collection truck companies. Therefore, it is necessary that the truck reservation system can respond in time when the arrival time of the external container truck is uncertain, and restore or reduce the impact of the uncertainty of the arrival time of the external container truck on the system as soon as possible.
Due to the uncertainty of the actual arrival time of the external trucks, there may be too many or too few trucks in an appointment time window, which will affect the arrival of the external truck that arrives on time in the scheduled time window. In order to avoid disturbing the operation plan and interference with the arrival of the original scheduled external trucks, this article does not allow the late or early external truck to enter the port directly. Instead, the appointment quota will be issued again to allow the late or early external truck to enter again. For a real-time appointment, the newly released appointment share will be adjusted while the original appointment share remains unchanged.
Considering the uncertainty of the actual arrival time of the external trucks, we will reschedule the external trucks that cannot arrive on time. The TAS will send a reconfirmation message 30 min before the truck booking time window. If the truck driver predicts that the truck can arrive at the port on time, it will confirm the truck booking time window. If the truck driver predicts that the truck cannot arrive at the port on time, then submit a predicted arrival time window, and the TAS will re-scheduling based on this. For the external trucks that are scheduled to arrive early in the first time window, it is necessary to turn off the vehicle buffer at the gate and wait until the first time window is allowed to enter the port. For the external trucks, except for the first time window of the reservation, it is necessary to make a reasonable appointment based on the time window quota issued by the truck appointment system in real time. For the external trucks except for the last time window of the reservation, if the truck arrives at the port later than the scheduled time window, the truck simply needs to re-book within the time window based on the additional quota issued by the TAS in real time. For the external trucks that are late for the last time window of the appointment, they are not allowed to enter the port in order to meet the requirements of the port time window.
4. Dynamic Appointment Rescheduling Model for Trucks with Uncertain Arrival Time
The TAS will determine the re-published appointment quota according to the status of the external trucks inside and outside the time window. The longer the early or the shorter the late time is, the more options are available for the external trucks. When the total number of appointments reaches the maximum, the time window is closed.
4.1. Variable Definitions
Indices:
| Time window of the port | |
| Time window for trucks arriving late or early | |
| Time interval of each time window | |
| The ID of the external truck | |
| Number of appointments for an external truck | |
| The appointment number of an external truck |
Sets:
| Set of time window , ; = 1 means the time window from 8 o’clock to 9 o’clock | |
| Set of time window | |
| Set of time intervals within a time window; e.g., ,, etc.; = 1 means the time interval between 8:00 a.m.–8:06 a.m. in the first time window | |
| Set of the number of appointments for each external truck (this article is set to 1~4 times), ; e.g., = 3 means the external truck has 3 appointments | |
| Appointment collection of external trucks with i appointments, e.g., ;, , etc. | |
| Set of the external Container Truck Company, e.g., , = 1 means company 1 | |
| Set of the gate | |
| Set of exhaust pollutants, ; e.g., = 1 means carbon monoxide (CO), = 2 means hydrocarbon, = 3 means PM |
Parameters:
| The penalty value of the truck waiting in line at Gate | |
| Total number of external trucks that arrived late or early | |
| The number of external trucks that are late or early in time window | |
| Threshold slope | |
| The number of late or early arrivals for truck company : | |
| The transportation cost threshold at various truck companies | |
| The actual number of reserved external trucks in time window | |
| The average arrival rate of the external trucks in the time interval | |
| Average departure rate in time interval | |
| The average queue length of the external trucks in the time interval | |
| The status of the b-th appointment in the time window of the external truck k with i-th appointment | |
| The number of re-schedules in time window of the external trucks that arrived late or early in time window | |
| Number of external trucks late for the last time window of the appointment | |
| Order volume in time window | |
| Indicates the cost of adjusting the time window after all early or late trucks arrive at the port | |
| The number of differences between the time window for re-appointment and the appointment time window after the truck arrives at the port | |
| Total number of gates | |
| Number of inbound trucks at Gate | |
| The actual arrival time window of the truck | |
| The appointment arrival time window of external truck | |
| Total number of appointments submitted by the truck company | |
| Extra congestion time for external trucks | |
| Total change cost of the initial appointment plan of the truck company | |
| The number of re-appointments in time window of the external trucks that are late or early in time window | |
| The number of external trucks that are late or early in time window | |
| The number of time intervals in a time window | |
| Service efficiency at the gate in time interval | |
| Coefficient of variance of gate service time | |
| Emission coefficient of Class pollutants for trucks under unobstructed road conditions | |
| Emission coefficient of Class pollutants for trucks under unobstructed road conditions | |
| The environmental cost caused by each additional category pollutant | |
| Pickup truck reconfirmation arrival time |
4.2. Mathematical Model
We propose a reconfirmation strategy that truck drivers need to confirm whether they can arrive at the port on time 30 min before the appointment time window, which is denoted by . If they can arrive at the port on time, then is 0; if they cannot arrive on time, then is 1, as in Equation (1). Since the reissued time window appointment quota of the TAS is proposed in the case of the late or early arrival of the external truck, a decision variable is established in the model in which the late or early arrival in the time window is , the number of re-appointments of the external trucks in the time window is .
The objective function is shown in Equation (2). Since the late or early external trucks will be rescheduled when they arrive at the port, the objective function is to minimize the cost of adjusting the time window and the gate waiting cost for all trucks. The first part of the objective function represents the cost of adjusting the time window after all of the early or late external trucks arrive at the port. The second part is the average waiting cost of external trucks at the terminal gates. The third part is the additional environmental pollution cost caused by trucks decelerating and idling in the morning and evening peak hours and queues waiting in the gate. The pollutant emission coefficients and are obtained from the emission factors. The emission factors can refer to the exhaust emissions of trucks in the National Sixth Standard (China).
Subject to:
Equation (3) represents the cost of adjusting the time window after all of the early or late external trucks arrive at the port. Equation (4) represents the number of the difference between the time window for re-appointment after truck arrives at the port and the time window for the appointment. Equation (5) is the threshold formula in uncertain environment based on deterministic environment. The more the number of late or early arrivals of the truck company, the higher the threshold. Equation (6) ensures that the cost increase of each truck company’s changing time window does not exceed the predetermined threshold. When the appointment external truck in the first time window arrives early, the time window is not allowed to be adjusted. When the appointment external truck in the last time window arrives late, it is not allowed to enter the port. If is the appointment time window in both cases, the number of re-appointments is 0, as in Equation (7). Equation (8) represents the number of external trucks actually reserved in the time window. Equation (9) represents the non-negative constraint on the number of external trucks actually reserved in the time window. Equation (10) represents the number of external trucks arriving at gate in the time interval. Equation (11) represents the time period of each time interval. Equation (12) represents the number of external trucks entering the port at gate at time . Equation (13) indicates that the length of the external truck queue at each gate in each time interval cannot exceed the maximum queue length allowed by the port. Equation (14) expresses the non-negative constraint on the queue length at the truck gate. Equation (15) indicates that the total number of late or early external trucks in a day is equal to the total number of newly reserved external trucks in each time window plus the number of late external trucks in the last time window of the appointment. Equations (16) and (17) are non-negative constraints. Equation (18) is to divide the total number of external trucks that actually arrive in a time window by the number of time intervals in the time window to get the average number of external trucks that arrive in each time interval. The gate queuing method of the next set of truck dynamic appointment rescheduling model with uncertain arrival time adopts the point-by-point smooth fluid flow approximation method. The point-by-point smooth fluid flow approximation method requires a shorter duration than the time window. The PSFFA method is described in Figure 1. Equation (19) is used to define the departure rate from gate to container yard in each time interval. It is the smaller value of and . Equation (20) is used to calculate the length of the external truck queue in each time interval. Equation (21) represents the additional transportation time of trucks caused by congestion during morning and evening peak hours.

Figure 1.
PSFFA description.
5. Solution Methodology
Aiming at the problem that external trucks cannot arrive at the port on time, a double-chain real quantum genetic algorithm is proposed to solve the problem. The use of double-stranded coding reduces the solution time, and the use of an adaptive cross-mutation strategy can increase the accuracy of the solution.
5.1. Encoding Rules
In view of the uncertainty problem of external trucks not being able to arrive at the port on time, the coding rules of double-stranded real chromosomes are adopted. Each chromosome Pi has two upper and lower gene chains. Since the number of port time windows per day is 10, so the subscript here is 10 and the length of the chromosome is 10, shown as mnew = 10. The coding form is shown in Equation (22).
Among them, and are the difference degree value, which is generated by the fuzzy number, and the fuzzy number feature is represented by , where is the average value, the calculation method is as shown in Equation (23); is the variance, and the calculation method is as Equation (24).
is the minimum value of the fuzzy number, xm is the most likely value of the fuzzy number, and xn is the maximum value of the fuzzy number, as shown in Figure 2b. The upper chain of the chromosome represents the initial optimal appointment plan of the external truck i times, and the lower chain represents the appointment plan when the external truck i is reconfirmed, so as to determine the appointment status and re-appointment status of each external truck. Since the maximum number of appointments per day for each external truck is 4, the value of each gene is an integer from 0 to 4:0 means that the external truck has no appointment in the corresponding time window, and 2 represents that the appointment times of this external truck in the corresponding time window are 2 times. Convert the double-stranded real number code to binary code and then perform qubit coding17.
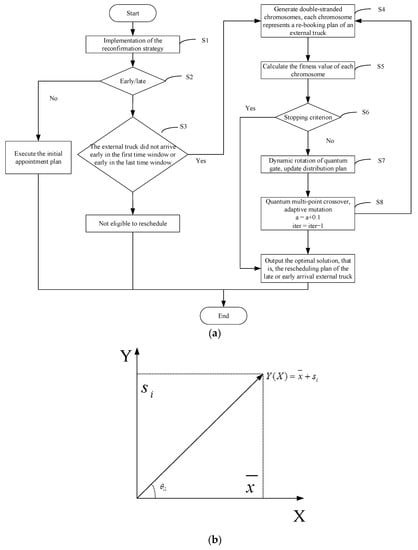
Figure 2.
Algorithm flow chart and explanation of fuzzy number space. (a) Algorithm flowchart; (b) fuzzy number space interpretation.
5.2. Cross and Mutation Operation
We use multi-point crossover here. Two chromosomes are paired with each other, two crossover points are randomly selected in the code string, and then the parts between the two crossover points are exchanged, thereby generating two new individuals. The mutation used selects the optimal solution according to the mutation probability. Quantum not-gate operation is applied to the qubits of each chromosome. By changing the probability range of the qubits, the qubits on the double-stranded gene will mutate at the same time. The mutation process is as Equation (25), where is the rotation angle corresponding to the i-th chromosome qubit:
5.3. Adaptive Quantum Revolving Door Update
In order to improve the search performance of the algorithm, a mechanism for dynamically adjusting the rotation angle is designed to update the adaptive quantum revolving gate. Each qubit of each quantum chromosome are performed the following operations: , . , is rotation directions, which are used to ensure the convergence of the algorithm, is the rotation angle, which is used to control the convergence speed of the algorithm (n is the n-th chromosome and s is the s-th qubit). , where is the fitness value of the current optimal individual, is the fitness value of the current individual that needs to be updated, is the rotation angle corresponding to the current optimal individual, and is the rotation angle of the current individual that needs to be updated.
5.4. Termination Condition
There are two termination conditions:
- (1)
- If the model has a feasible solution, increase the value of a, which will affect the current company’s threshold. When the threshold reaches the set maximum threshold, stop running and output the optimal solution. If there is no feasible solution before reaching the set threshold, directly output the optimal solution currently running.
- (2)
- Set the maximum number of iterations. When the number of iterations reaches the maximum, stop running and output the current optimal solution.
When any one of the two termination conditions is met, the operation can be stopped and the optimal solution can be output.
5.5. Algorithm Flow
The algorithm flow is shown in Figure 2a.
S1: Let the maximum number of iterations iter = 1000, and execute the reconfirmation strategy ;
S2: External trucks arrive early/late;
In the step S2, when the external truck does not arrive early/late, it is executed according to the initial appointment plan;
S3: The external truck is not arrive early/late in the first/last time window;
In the step S3, when the external truck is early/late in the first/last time window, there is no qualification to re-appoint;
S4: Generate double-stranded coding chromosomes, the length of chromosomes , and each chromosome represents the rescheduling plan of an external truck;
S5: Calculate the fitness value and record the optimal solution, calculate the rescheduling cost according to the objective function, and use the reciprocal 100 times as the fitness value , that is ;
S6: When the termination condition is met, the truck re-appointment plan corresponding to the maximum fitness value is output as the best re-scheduling plan for trucks arriving early/late;
In the step S6, when the termination condition is not met, step S7 is executed;
S7: Use adaptive quantum gate to dynamically rotate , update the distribution plan of late/early arrival trucks;
S8: Using quantum multi-point crossover, adaptive mutation updates the allocation plan of late/early arrival trucks, set a = a + 0.1, iter = iter − 1, and go to step S4.
6. Numerical Experiments
In order to verify the feasibility of the model and algorithm, simulation experiments and comparative studies are carried out. The relevant experimental conditions and parameter settings refer to literature [17]. All experiments are performed on a computer with Intel Core i7, 1.8 GHz CPU, and 8 GB RAM.
6.1. Comparison of Simulation Experiment Results
In order to clearly express the plan adjustment process of the TAS for trucks that cannot arrive at the port on time, Table 1 shows the best appointment plan of a truck company and the actual arrival situation. Experiment 1 shows that (1,4,6,8) is the best booking time window of the truck, and the actual arrival situation is that the truck cannot reach the port at the first time window on time. Before the actual arrival of the truck, the TAS will change the appointment plan into (2,4,6,8). Experiment 2 is an appointment plan for two trucks. The best appointment plan for the first truck is (2,3). The actual arrival situation is that the first truck arrives at the fourth time window instead of the third time window. The best appointment plan for the second truck is (2,6,7), and the actual arrival situation is that the second truck arrive at the fourth time window instead of the second time window. The TAS changes the booking plans of the two trucks to (2,4) and (5,6,7). The fourth time windows will be allocated to the first truck, due to the first-come-first-served rule and the 1 quota of the fourth time window. Then, the second truck can only be reserved at the fifth time window. Experiment 3 is also an appointment plan for two trucks. The first truck arrives in port on time, and the second truck is late for two time windows, so the TAS delay the task of the second truck at the first time window by two later. Thus, we get the final appointment plan.

Table 1.
The actual arrival and re-scheduling situation of a certain truck company.
Nowadays, for trucks that cannot arrive at the port on time, the TAS will follow the “first come first” rule to arrange the trucks to enter the port after the truck arrives at the port. In order to verify the effectiveness of the redistribution model of the truck appointment scheme in this study in which trucks cannot arrive at port on time. We solve the small, medium, and large-scale problems, respectively, and compared the results with the traditional scheduling results in literature [18]. The results are compared, as shown in Figure 3.

Figure 3.
Comparison of experimental results. (a) Comparison of small-scale problems; (b) comparison of medium-scale problems; (c) comparison of large-scale problem.
The experimental parameter data are shown in the Appendix A. For small-scale problems, the scale of goods is (4 Jobs 8 Jobs 11 Jobs 15 Jobs 18 Jobs 22 Jobs 26 Jobs 32 Jobs 36 Jobs 37 Jobs 50 Jobs 55 Jobs). The specific comparison results are shown in Figure 3a. It can be seen from Figure 3a that the total cost of the external truck dynamic appointment rescheduling model under uncertain arrival time is lower than that of the traditional scheduling model, which shows that the proposed model can be more perfect. Although the cost difference of individual cargo scale (for example, 8 Jobs, 15 Jobs, 26 Jobs) is small, it is mainly since the small-scale truck scheduling is relatively single, and the number of trucks that do not arrive at the port on time is relatively small, making the overall cost gap is relatively small. But for the small-scale problem, the proposed model is better than the traditional scheduling model.
For the medium-scale problem, the scale of goods is (257 Jobs 324 Jobs 417 Jobs 492 Jobs 569 Jobs 602 Jobs 663 Jobs), and the specific comparison results are shown in Figure 3b. When the size of the goods becomes larger, the number of trucks arriving at the port on time will increase correspondingly, and the cost of re-scheduling will also increase correspondingly. It can be clearly seen from Figure 3b that the target cost of the dynamic appointment rescheduling model for the uncertain arrival time is significantly lower than that of the traditional scheduling model. This shows that when the scale of the problem increases, the rescheduling model proposed in this study will more reasonably schedule the trucks that do not arrive at the port on time, which is more in line with the requirement of the trucks arriving at the port evenly.
For large-scale problems, the scale of goods is (701 Jobs 754 Jobs 827 Jobs 1032 Jobs 1782 Jobs 2438 Jobs), and the specific comparison results are shown in Figure 3c. From the comparison results of large-scale problems, it can be clearly seen that the cost of the dynamic appointment rescheduling model for the next set of trucks with uncertain arrival time is significantly lower than the traditional scheduling cost. Especially when the quantity of goods reaches 1500 Jobs, scheduling costs will increase rapidly, since when the quantity of goods is large enough, the corresponding orders and the number of trucks will also increase. The uncertainty of the arrival time of trucks leads to large-scale adjustments of goods orders. This also shows that the proposed model is not only suitable for small and medium-scale problems, but also for large-scale problems. The dynamic appointment rescheduling model for trucks with uncertain arrival time can also be optimized for scheduling, and while comparing with the traditional scheduling model, the experimental results should be significantly better and more in line with the actual application requirements of the truck company and the port company.
To further validate the performance of the proposed model, experiments are carried out when the truck arrival time follows Poisson distribution. The 95% confidence interval [19] of the rescheduling cost are plotted in Figure 3a–c.
It can be seen from the simulation results that the total cost of the truck dynamic appointment rescheduling model under the uncertain arrival time in this study is much lower than the cost of the traditional scheduling model. When the arrival time follows Poisson distribution, the total cost of the proposed model is still highly probabilistically lower than the traditional model. Another reason is that the arrival time of the truck will be reconfirmed before, and the TAS can arrange the corresponding appointment plan in advance, saving a lot of time and costs.
According to the results, a continuous trendline for the proposed scheduling model is obtained through polynomial fit. The polynomial is f(x) = 9.469 × 10−7 x3 − 5.687 × 10−5 x2 + 7.986 x + 552.2. The original experiment results and the polynomial fit curve are plotted in Figure 4. Another twenty inputs are tested and the test results are also given in Figure 4. It can be seen that this polynomial can basically reflect the rescheduling cost’s changing trend with job numbers. The test results roughly follow this fitting curve.
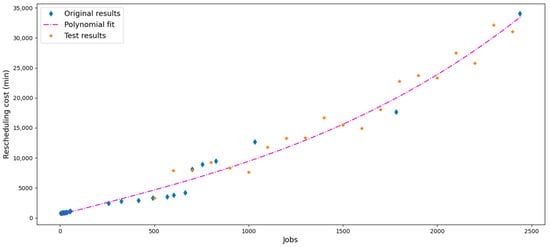
Figure 4.
Fitting of experimental results and test results.
In order to highlight the superiority of the proposed model, the number of trucks in the port is compared with the traditional scheduling model, as shown in Figure 5. The horizontal axis is the time window of the port in one day, and the vertical axis is the number of trucks in the port. Five time points are selected in each time window to count the number of external trucks in port. Similar to Figure 3, experiments are carried out when the time window follows normal distribution. The 95% confidence interval of the truck number is plotted in Figure 5.

Figure 5.
Changes in the number of trucks in port.
By comparing with the traditional scheduling model, it can be seen that the proposed model under uncertain arrival time can better schedule the flow of vehicles, and the peak traffic of trucks in the port is also significantly reduced since the trucks arrive at the port more evenly. Even if the time window follows the normal distribution, the proposed model still has a high probability to outperform the traditional model. Since the impact of the morning and evening rush hours on the arrival time of trucks are considered, it can be clearly seen that the number of trucks in the port during the urban traffic peak period is significantly reduced, which increases the fault-tolerant rate of truck companies and trucks and relieves the congestion of the port. The whole working process is more in line with the needs of actual operations, and the actual application value of the TAS has been greatly improved.
6.2. Algorithm Comparison
In order to verify the effectiveness of the algorithm, we selected five medium-scale calculation examples, numbered Z1, Z2, Z3, Z4, Z5, and compared them with the algorithms in literatures [4,20]. The specific results are shown in Table 2. It can be seen that the double-chain real genetic algorithm is significantly faster than the other two algorithms, and it is more in line with the timeliness requirements of the TAS to reschedule the appointment plan. At the same time, the target value of the optimal solution of the proposed algorithm is also lower than the target value obtained by other algorithms, which is more in line with the requirements of reducing the re-scheduling cost of the TAS.
Table 2.
Algorithm comparison.
In order to verify the performance of the double-chain real quantum genetic algorithm. Based on the parameters of Z5, the double-strand real quantum genetic algorithm (Abbreviated as Algorithm 1), tabu search algorithm (Abbreviated as Algorithm 2) [18] and genetic algorithm (Abbreviated as Algorithm 3) [19] are used to obtain the solution. The algorithm runs 20 times continuously. The box plot comparison of fitness value, convergence algebra, and convergence time is shown in Figure 6.
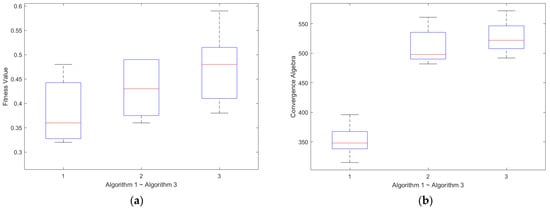

Figure 6.
Algorithm performance comparison. (a) Comparison of fitness values; (b) convergent algebraic comparison; (c) convergence time comparison.
It can be seen from Figure 6 that the performance of the double-chain real quantum genetic algorithm is significantly better than the other two algorithms, especially the convergence time has a more obvious advantage. Thus, the TAS can reschedule the appointment in time to meet the comprehensive needs of trucks and ports.
6.3. Sensitivity Analysis
6.3.1. The Impact of the Probability of Trucks Not Being Able to Arrive at the Port on Time on the Re-Scheduling Cost of the TAS
In order to better study the impact of the probability of trucks not arriving at the port on time on the cost of the TAS’s rescheduling plan, and under the condition that the probability of trucks not being able to arrive at the port on time is 0.1 to 0.7, sensitivity analysis is carried out in small-scale (50 Jobs), medium-scale (324 Jobs), and large-scale (827 Jobs), as shown in Figure 7. It can be seen from Figure 7 that when the probability of the truck being unable to arrive at the port on time is 0.1 or 0.2, the overall rescheduling cost is the lowest. As the probability increases, the cost of consumption also increases. Especially when the probability is greater than 0.5 (no matter what scale the problem is), the cost of rescheduling will increase significantly. For small-scale problems, when the probability is 0.1~0.4, the cost consumption gap is not large. The reason is that the small-scale problems involve a small number of trucks, and the entire TAS is rescheduled the appointment plan. The pressure posed by is also relatively small. When the probability increases to 0.5, the cost of small-scale problems will increase significantly, since when the probability is greater than 0.5, especially when the probability reaches 0.7, it almost means the failure of the previous best appointment plan. This also shows that the occurrence of uncertain time has seriously affected the pre-allocated value of the appointment system, so it will cause increase large secondary scheduling costs.
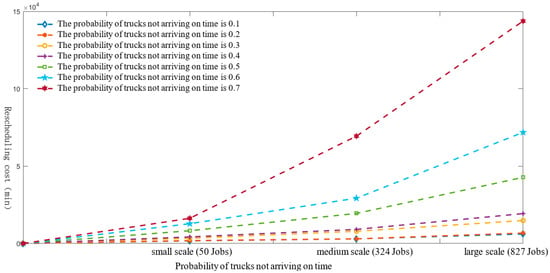
Figure 7.
The impact of the probability of trucks not being able to arrive at the port on time on the cost of rescheduling.
6.3.2. The Impact of the Trucks Reconfirming Time on the Cost of the Rescheduling
In order to study when the operation of reconfirming the arrival time of the truck is the best, a corresponding sensitivity analysis is made, as shown in Figure 8. The impact of 0 min, 10 min, 20 min, 30 min, 40 min, 50 min, and 60 min on the rescheduling of medium-scale problems are selected, respectively. 30 min means that the truck driver confirms the arrival status of the truck 30 min before the appointment time window. If the truck arrives at the port on time, the feedback will be delivered on time. If it is expected that if the truck cannot arrive on time, it will feedback the time interval of the late or early arrival. In this way, the TAS can reschedule the plan in advance. Figure 8 shows that when the reconfirmation time is 30 min before the appointment time, the TAS has the lowest rescheduling cost. When the time is 0 min, it means that the trucker will notify the trucker appointment system of its arrival status when it arrives at the port. This is an urgent task for the trucker appointment system, which will not only increase the processing time of the trucker appointment system, and also cause the congestion of the truck in the buffer area and increase the waiting time of the truck, which will result in that the cost of rescheduling is much higher than other times.

Figure 8.
The influence of truck reconfirmation time on the cost of rescheduling.
6.3.3. The Impact of the Truck’s Failure to Arrive at the Port on Time on the Threshold of the Truck Company
The late or early arrival of the truck will have an impact on the threshold of the truck company, and the threshold will directly affect the priority of the truck company when making an appointment and the number of changes to the appointment plan. In order to study the impact of the early or late arrival of trucks on the thresholds of truck companies, a corresponding sensitivity analysis has been carried out. For small, medium, and large-scale issues, the late or early arrival of trucks is divided into less than 15 min, 15~30 min and greater than 30 min, to explore the threshold changes of different scales under these three late or early arrivals, as shown in Figure 9. As shown in Figure 9, when the late or early arrival time of the truck company’s truck is less than 15 min, the impact on the company threshold is minimal; when the truck company’s late or early arrival time is greater than 30 min, the company’s threshold has changed significantly, which is very detrimental to the next appointment made by the truck company. This also shows that the punctual arrival of the trucks in the port will directly affect the initiative of the truck company’s selection and modification of the appointment plan. For the integrity of the truck company, the TAS will have more restrictions on the truck company when assigning appointment plans.

Figure 9.
The impact of the truck’s failure to arrive at the port on time on the company’s threshold.
7. Conclusions
In this paper, a dynamic appointment rescheduling model is established considering the uncertainty of the arrival time of external trucks. First, the external truck reconfirmation strategy was implemented, and the truck driver confirmed whether the external truck could arrive on time 30 min before the appointment time. For external trucks that cannot arrive at the port on time, the TAS will reschedule the plan to ensure that the cost of rescheduling is the lowest. The simulation results show that the proposed model has obvious advantages, especially for medium-scale and large-scale problems. The cost of the rescheduling strategy in this study is significantly lower than that of the traditional scheduling strategy. The algorithm used in this research is also compared with the traditional genetic algorithm and tabu search algorithm. It can be seen that the performance of the double-chain real quantum genetic algorithm proposed in this research is significantly better than the other two algorithms.
With the popularization and use of the truck reservation system, the requirements for it are higher and higher. The research of this paper still has the following deficiencies: (1) This paper adopts the distribution mode of time window. If the truck in the last time window is late, the truck cannot make a new reservation. However, in the actual operation of the port, the container truck can continue to enter the port after exceeding the time window of the port. This problem can be improved in future research. (2) Although there is the phenomenon of early arrival or late arrival of the container truck, this paper defaults that the container truck can arrive at the port after making a successful appointment, and does not consider the situation that it cannot arrive at the port after reservation. This situation can be considered in the uncertain part. There is a probability that the container truck will not arrive at the port. Therefore, it is necessary to design a better strategy to minimize the adjustment of the reservation scheme.
Author Contributions
Conceptualization, resources, review and editing, B.X.; methodology, software, validation, formal analysis, writing, X.L.; supervision, J.L.; example verification, Y.Y. and J.W.; English editing and correction, Y.S. and Y.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (No. 52102466), the Natural Science Foundation of Shanghai (No. 21ZR1426900). Here we would like to express our gratitude to them.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data used to support the findings of this study are included within the article.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A. Experimental Parameter Data
Table A1.
Parameter data in experiments.
Table A1.
Parameter data in experiments.
| NO. | Jobs | Quota per Time Window | Number of Truck Companies | Port Coordinates (min) | Transportation Area | |
|---|---|---|---|---|---|---|
| X | Y | (min × min) | ||||
| 4 | 4 | (1,1,1,1,1,1,1,1,1,1) | 1 | 0 | 80 | 160 × 160 |
| 5 | 8 | (2,2,2,2,2,2,2,2,2,2) | 1 | 0 | 80 | 160 × 160 |
| 6 | 11 | (2,2,3,3,3,3,3,3,2,2) | 2 | 0 | 80 | 160 × 160 |
| 7 | 15 | (3,3,4,4,4,4,4,4,3,3) | 2 | 0 | 80 | 160 × 160 |
| 8 | 18 | (4,4,4,4,4,4,4,4,4,4) | 3 | 0 | 80 | 160 × 160 |
| 9 | 22 | (4,4,5,5,5,5,5,5,4,4) | 3 | 0 | 80 | 160 × 160 |
| 10 | 26 | (5,5,6,6,6,6,6,6,5,5) | 4 | 0 | 80 | 160 × 160 |
| 11 | 32 | (6,6,8,8,8,8,8,8,6,6) | 4 | 0 | 80 | 160 × 160 |
| 12 | 36 | (7,7,8,8,8,8,8,8,7,7) | 5 | 0 | 80 | 160 × 160 |
| 13 | 37 | (7,7,9,9,9,9,9,9,7,7) | 5 | 0 | 80 | 160 × 160 |
| 14 | 50 | (9,9,11,11,11,11,11,11,9,9) | 6 | 0 | 80 | 160 × 160 |
| 15 | 55 | (10,10,13,13,13,13,13,13,10,10) | 7 | 0 | 80 | 160 × 160 |
| 16 | 100 | (18,18,22,22,22,22,22,22,18,18) | 13 | 0 | 80 | 160 × 160 |
| 17 | 157 | (29,29,35,35,35,35,35,35,29,29) | 21 | 0 | 80 | 160 × 160 |
| 18 | 209 | (38,38,46,46,46,46,46,46,38,38) | 27 | 0 | 80 | 160 × 160 |
| 19 | 257 | (47,47,57,57,57,57,57,57,47,47) | 32 | 0 | 80 | 160 × 160 |
| 20 | 324 | (59,59,72,72,72,72,72,72,59,59) | 38 | 0 | 80 | 160 × 160 |
| 21 | 417 | (76,76,92,92,92,92,92,92,76,76) | 47 | 0 | 80 | 160 × 160 |
| 22 | 492 | (89,89,109,109,109,109,109,109,89,89) | 60 | 0 | 80 | 160 × 160 |
| 23 | 569 | (103,103,126,126,126,126,126,126,103,103) | 67 | 0 | 80 | 160 × 160 |
| 24 | 602 | (109,109,133,133,133,133,133,133,109,109) | 71 | 0 | 80 | 160 × 160 |
| 25 | 663 | (120,120,146,146,146,146,146,146,120,120) | 74 | 0 | 80 | 160 × 160 |
References
- Zehendner, E.; Feillet, D. Benefits of a truck appointment system on the service quality of inland transport modes at a multimodal container terminal. Eur. J. Oper. Res. 2014, 235, 461–469. [Google Scholar] [CrossRef]
- Mohssen Abdelmagid, A.; Gheith, M.S.; Eltawil, A.B. A comprehensive review of the truck appointment scheduling models and directions for future research. Transp. Rev. 2022, 42, 102–126. [Google Scholar] [CrossRef]
- Creemers, S.; Lambrecht, M.R.; Beliën, J.; Van den Broeke, M. Evaluation of appointment scheduling rules: A multi-performance measurement approach. Omega 2020, 100, 102231. [Google Scholar] [CrossRef]
- Torkjazi, M.; Huynh, N.; Shiri, S. Truck appointment systems considering impact to drayage truck tours. Transp. Res. Part E Logist. Transp. Rev. 2018, 116, 208–228. [Google Scholar]
- Yi, S.; Scholz-Reiter, B.; Kim, T.; Kim, K.H. Scheduling appointments for container truck arrivals considering their effects on congestion. Flex. Serv. Manuf. J. 2019, 31, 730–762. [Google Scholar] [CrossRef]
- Ramírez-Nafarrate, A.; González-Ramírez, R.G.; Smith, N.R.; Guerra-Olivares, R.; Voß, S. Impact on yard efficiency of a truck appointment system for a port terminal. Ann. Oper. Res. 2017, 258, 195–216. [Google Scholar] [CrossRef]
- Shiri, S.; Huynh, N. Optimization of drayage operations with time-window constraints. Int. J. Prod. Econ. 2016, 176, 7–20. [Google Scholar] [CrossRef]
- Yu, K.; Yang, J. MILP model and a rolling horizon algorithm for crane scheduling in a hybrid storage container terminal. Math. Probl. Eng. 2019, 2019, 4739376. [Google Scholar] [CrossRef] [Green Version]
- He, J.; Tan, C.; Zhang, Y. Yard crane scheduling problem in a container terminal considering risk caused by uncertainty. Adv. Eng. Inform. 2019, 39, 14–24. [Google Scholar] [CrossRef]
- Kourounioti, I.; Polydoropoulou, A. Application of aggregate container terminal data for the development of time-of-day models predicting truck arrivals. Eur. J. Transp. Infrastruct. Res. 2018, 18, 76–90. [Google Scholar]
- Sun, Y.; Hu, X.; Zeng, Q. Multi-objective optimization scheduling model for container terminal loading and unloading operation sequence. Syst. Eng. Theory Pract. 2020, 40, 195–209. [Google Scholar]
- Dos Santos, M.C.; Pereira, F.H. Development and application of a dynamic model for road port access and its impacts on port-city relationship indicators. J. Transp. Geogr. 2021, 96, 103189. [Google Scholar] [CrossRef]
- Wasesa, M.; Ramadhan, F.I.; Nita, A.; Belgiawan, P.F.; Mayangsari, L. Impact of overbooking reservation mechanism on container terminal’s operational performance and greenhouse gas emissions. Asian J. Shipp. Logist. 2021, 37, 140–148. [Google Scholar] [CrossRef]
- Xu, B.; Liu, X.; Yang, Y.; Li, J.; Postolache, O. Optimization for a multi-constraint TAS considering morning and evening peak congestion. Sustainability 2021, 13, 1181. [Google Scholar] [CrossRef]
- Chang, Y.; Ye, X.; Liu, W.; Xie, J.; Li, M. Scheduling Optimization of External Truck at Container Terminal Based on Appointment Feedback Mechanism. Syst. Eng. 2019, 6, 74–81. [Google Scholar]
- Von Westarp, A.G.; Schinas, O. A fuzzy approach for container positioning considering sustainable profit optimization. Transp. Res. Part E Logist. Transp. Rev. 2016, 92, 56–66. [Google Scholar] [CrossRef]
- Xu, B.; Liu, X.; Yang, Y.; Li, J. Multi-constraint scheduling model and algorithm of TAS considering the influence of morning and evening rush hour. Comput. Integr. Manuf. Syst. 2020, 26, 2851–2863. (In Chinese) [Google Scholar]
- Huang, X. Study on the Optimization of Booking Arrival of Container Terminals’ Foreign Trucks; Dalian Maritime University: Dalian, China, 2018. (In Chinese) [Google Scholar]
- Stefanakos, C.; Schinas, O. Fuzzy time series forecasting of bunker prices. WMU J. Marit. Aff. 2015, 14, 177–199. [Google Scholar] [CrossRef]
- Qianqian, S. Container Yard Cranes Configuration and Scheduling Optimization in Truck Appointment Mode; Dalian Maritime University: Dalian, China, 2017. (In Chinese) [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).