
Addressing the Directionality Challenge through RSSI-Based Multilateration Technique, to Localize Nodes in Underwater WSNs by Using Magneto-Inductive Communication


 , ,
, ,  , and
, and 
Abstract
:1. Introduction
2. Related Works
3. Localization and Challenges in MI-UWSNs
3.1. Physical Nature of Magnetic Fields
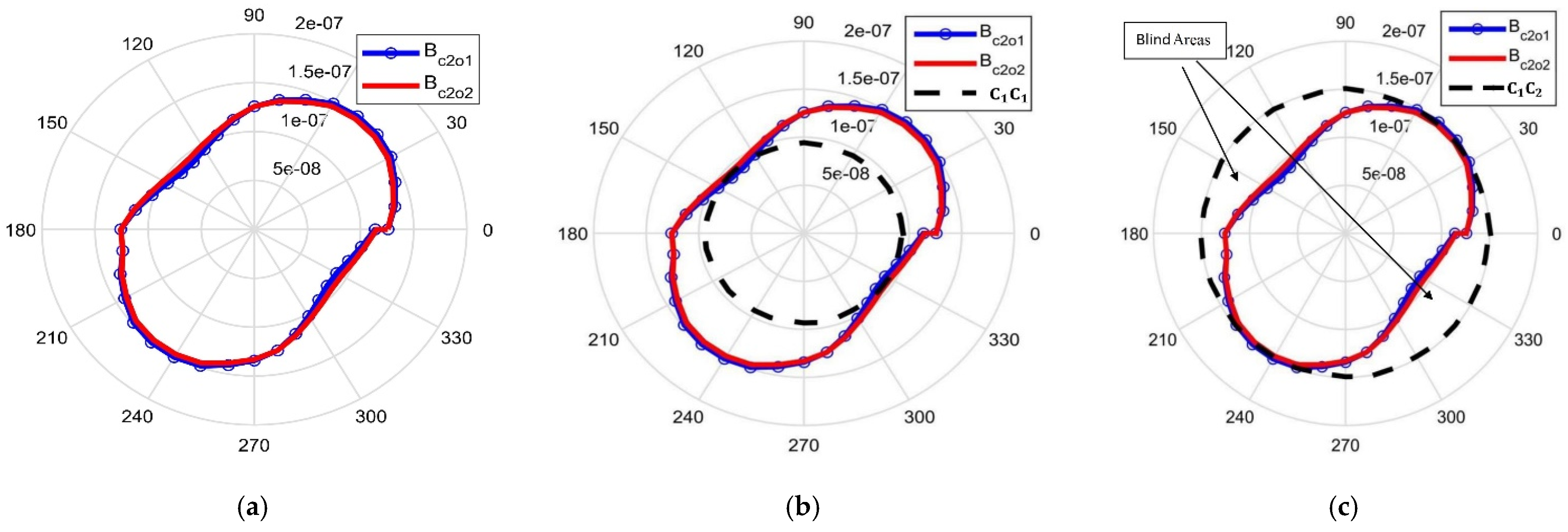
3.2. Highlighting the Directionalilty Problem
- (1)
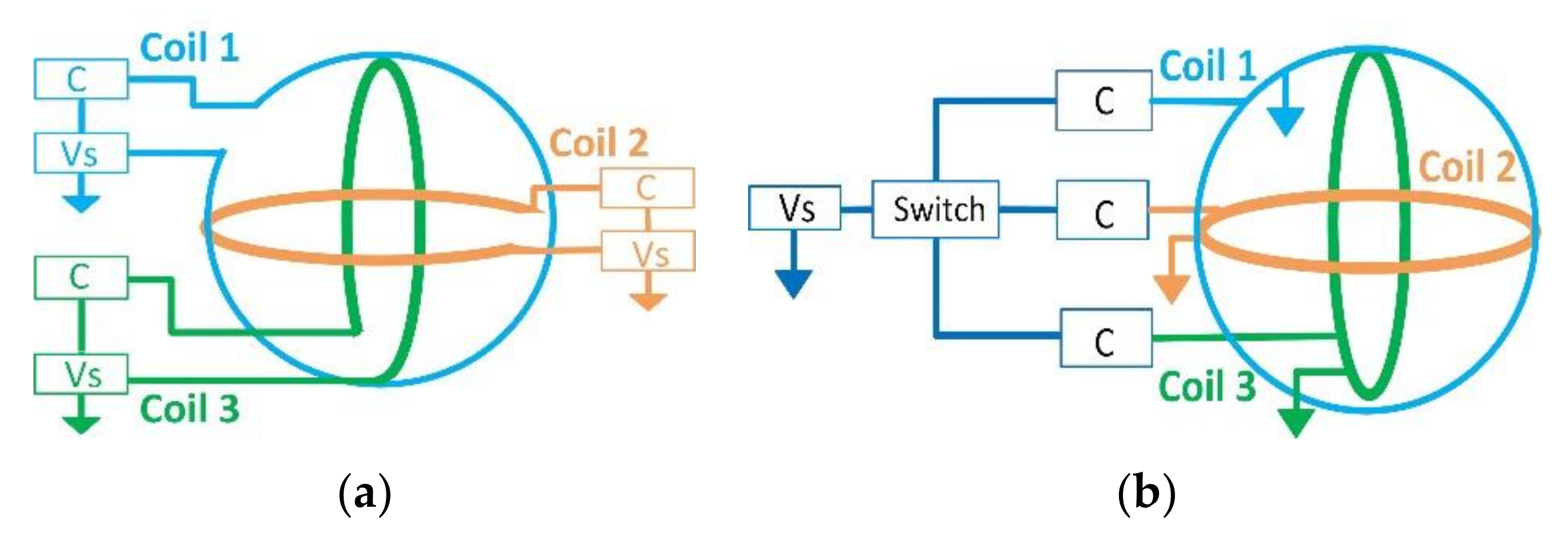
- Configuration 1 is a TD coil design, in which each of the three coils are coupled to an independent current source, as shown in Figure 4a. Furthermore, each of the three coils is transmitting a distinct signal in the form of magnetic flux. This configuration offers large-range communication, but at the expense of higher energy consumption [4,20]. In this configuration, two possible patterns of magnetic flux are generated, i.e., and , which are shown in Figure 5a. The pattern is generated when an in-phase current passes through the TD coil, on the other hand, the pattern is generated when an out-of-phase current flows through the TD coil.
- (2)
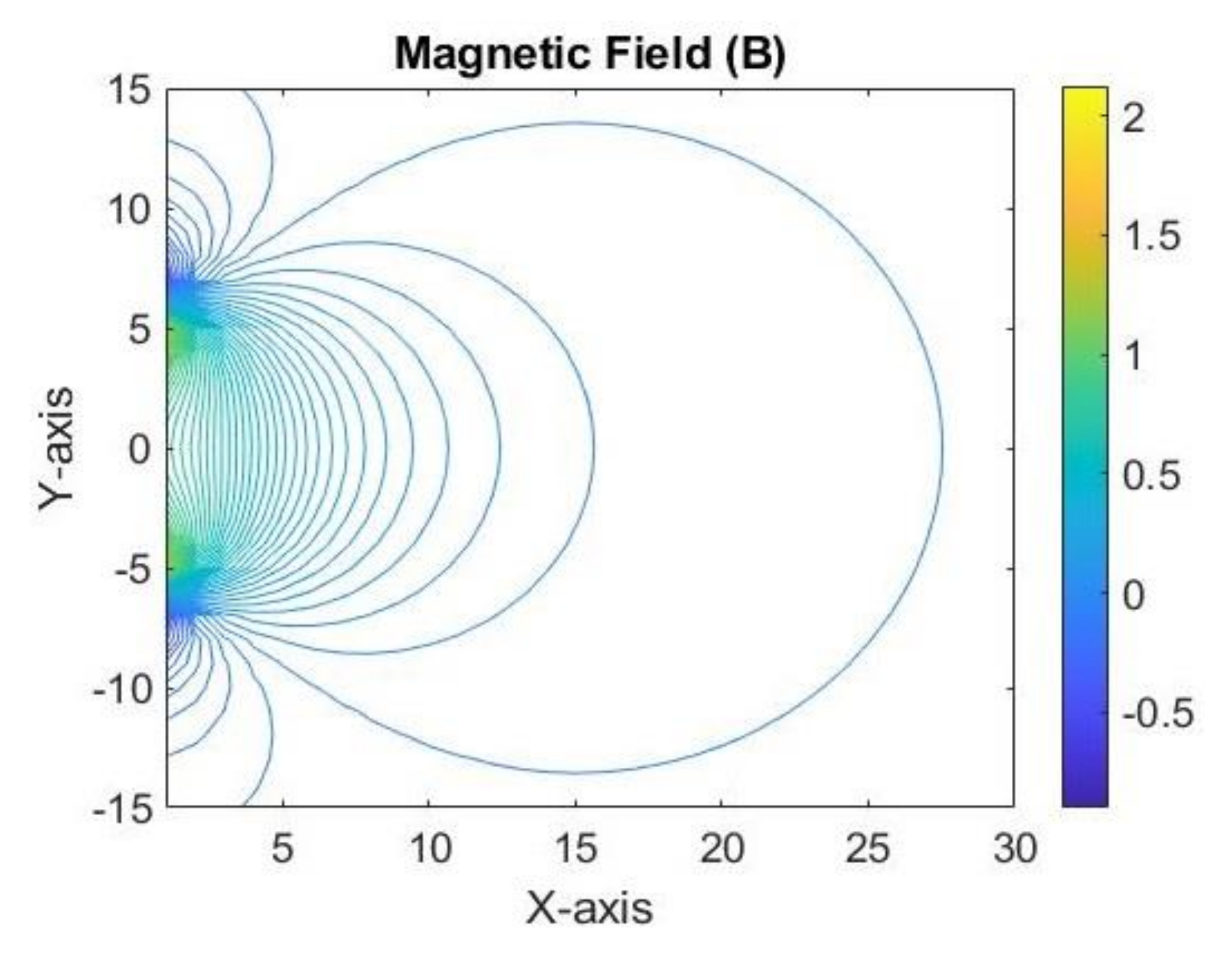
- The configuration 2 is a TD coil design, in which a switch connects each of the three coils to a single source as shown in Figure 4b, allowing just one coil (along its dimension) to be used at a time. The configuration 2 uses less energy but takes three times longer to transfer data [4,20]. The magnetic flux produced by configuration 2, i.e., is given in Figure 6. The is the combination of the magnetic flux produced by each of the three coils, which is represented by and , respectively. But here, as the data are presented in an xy plane, therefore, only are shown in Figure 6.
3.3. Impact of Directionality on Communication Distance
3.3.1. Possible Cases of Configuration 1
3.3.2. Possible Cases of Configuration 2
4. Evaluation of Localization Scheme
4.1. Evaluation Setup
4.1.1. The Localization Process
4.1.2. Pseudo Code of the Proposed Methodology
| Algorithm 1: A Pseudo Code of the Proposed Methodology |
| Start |
| : N = number of anchor Tx nodes |
| : M = number of sensor Rx nodes |
| : Error due to directionality = % |
| : Network size = 15 m × 15 m |
| : Computing the Euclidian distance b/w nodes |
| : for m = 1:M |
| : : for n = 1:N |
| : : : distance(n,m) = sqrt(anchor(n,1)-sensor(m,1))^2 |
| : : end |
| : end |
| :: Noise calculation = distance + distance. × Error due to directionality |
| :: Location Estimation = network Size × rand(M,2) |
| : for m = 1:M |
| : : for i = 1:number of Iteration |
| : : end |
| : end |
| : ) |
| End |
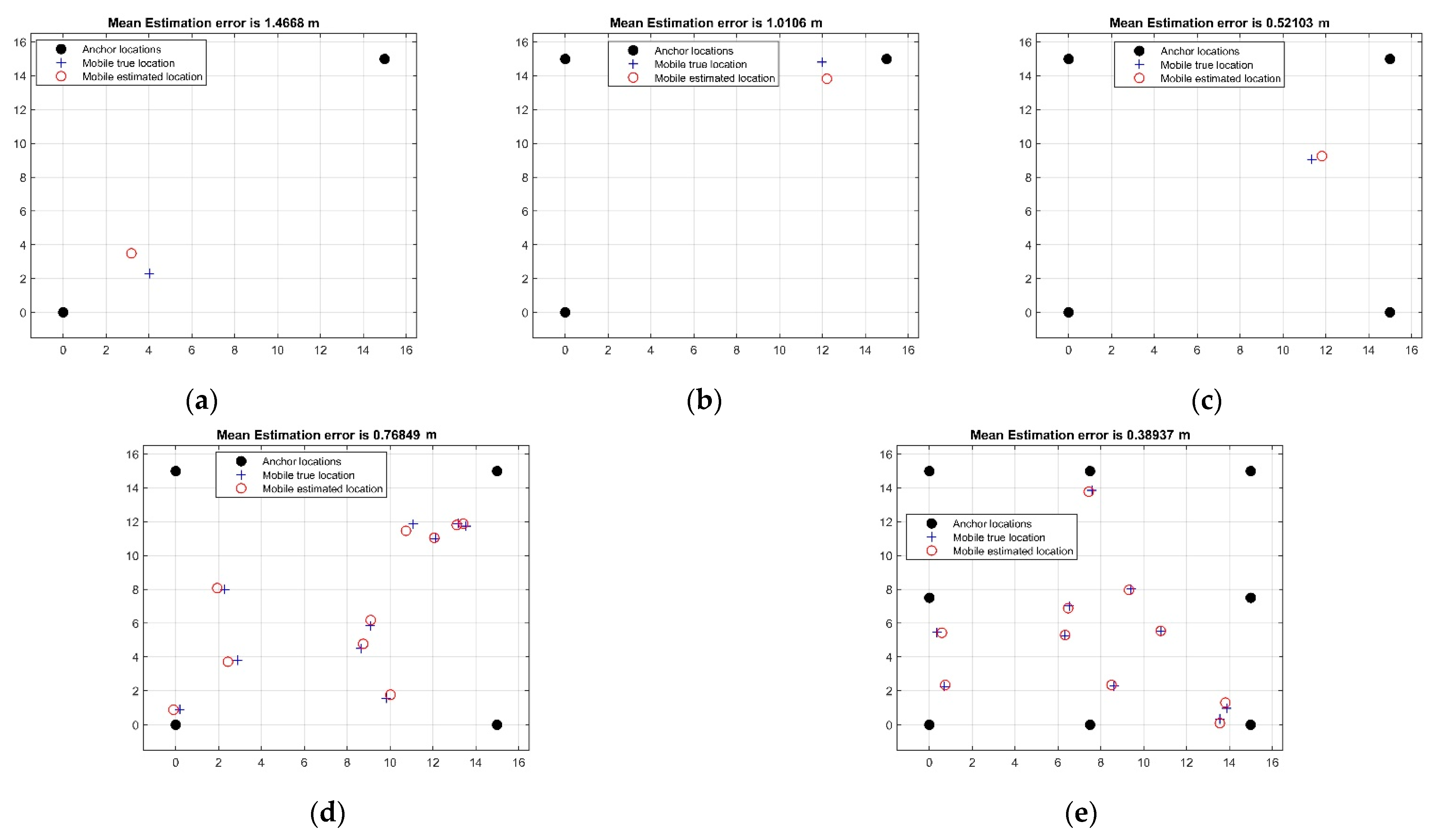
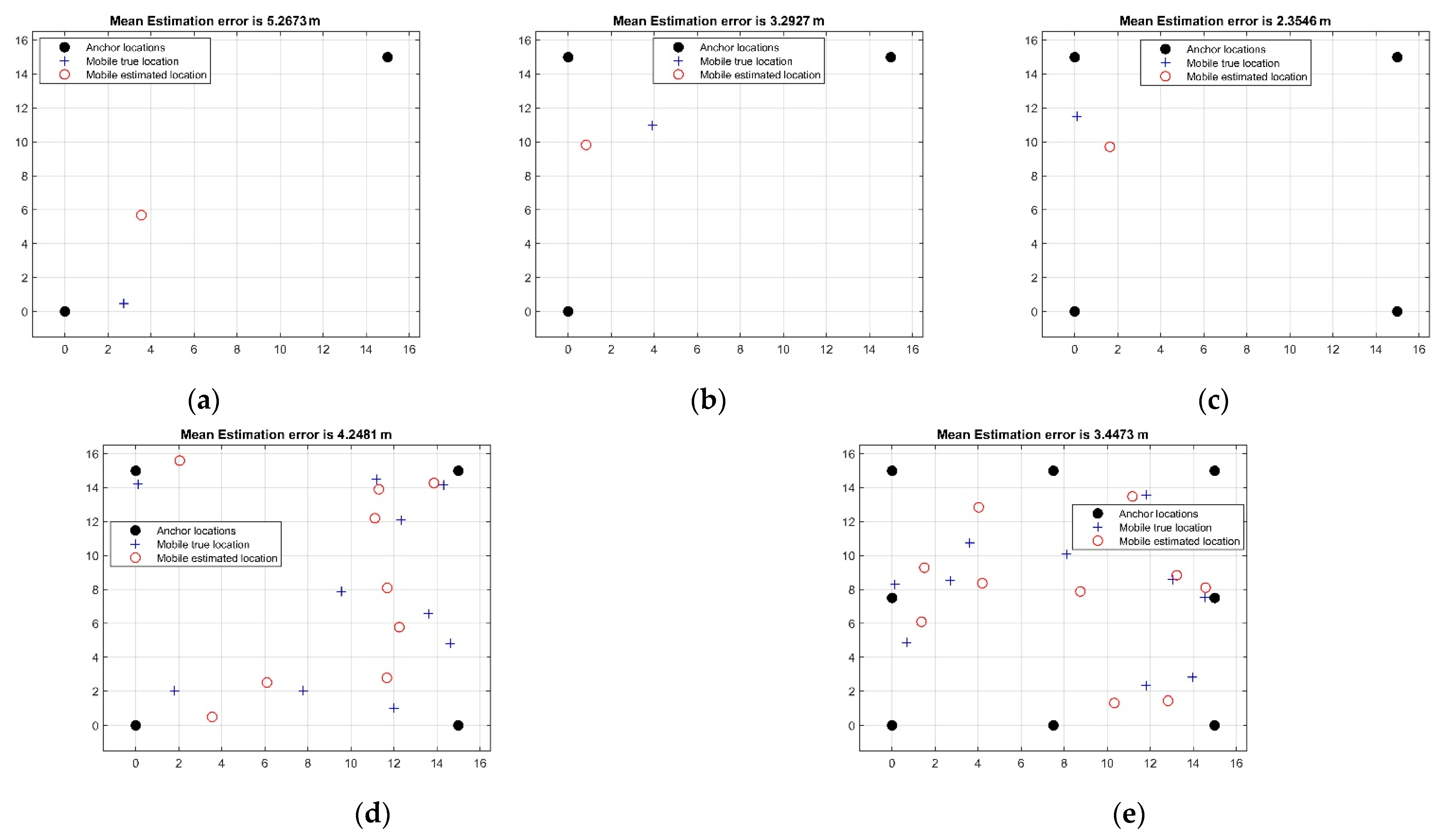
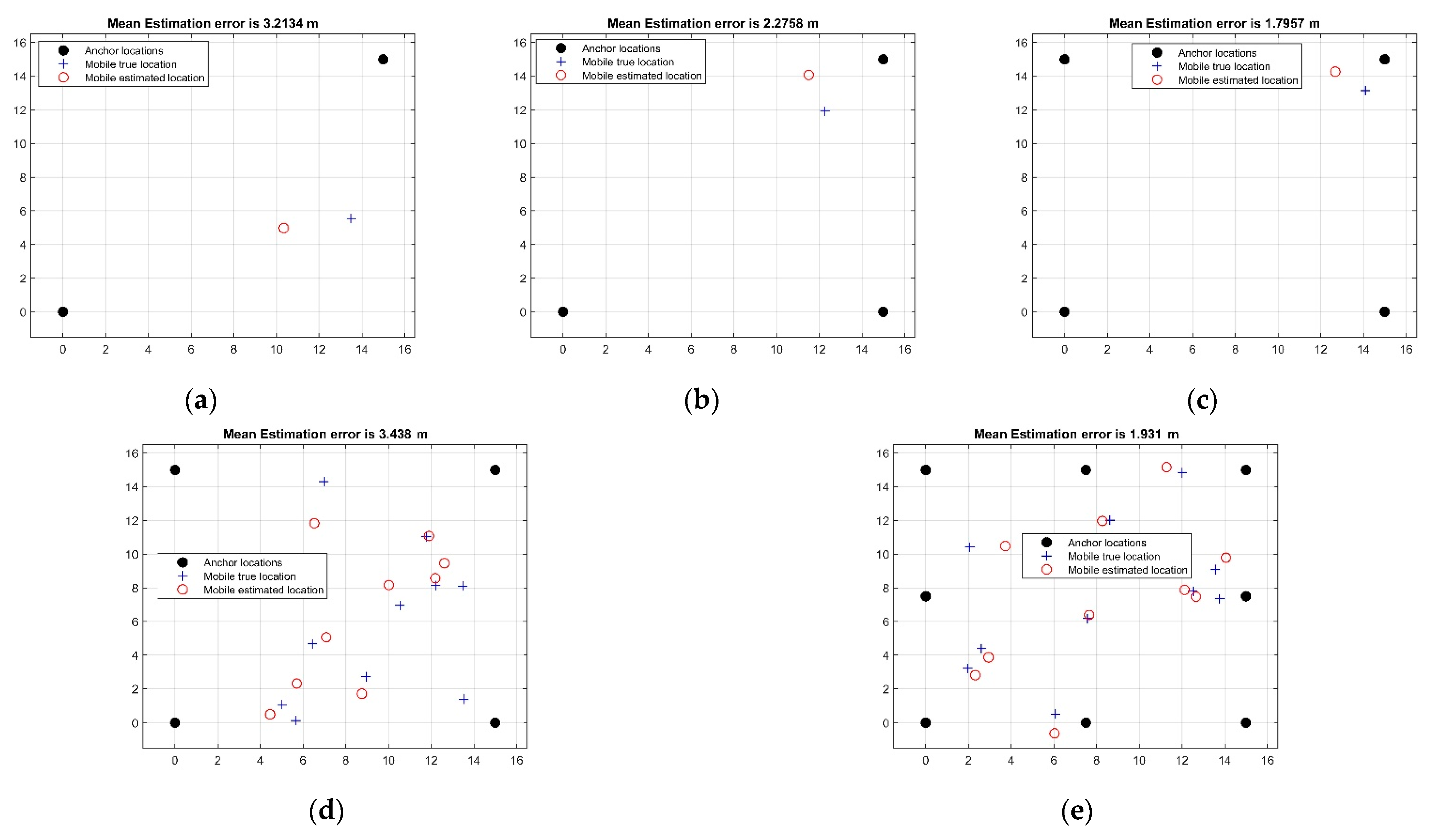
4.2. Results of Localization Estimation
4.2.1. Effect of Blind Areas with Configuration 1 Case 1
4.2.2. Effect of Blind Areas with Configuration 1 Case 2
4.2.3. Effect of Blind Areas with Configuration 2 Case 1
4.2.4. Effect of Blind Areas with Configuration 2 Case 2
5. Comparison and Summary
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef] [Green Version]
- Alrajeh, N.A.; Bashir, M.; Shams, B.J. Localization techniques in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2013, 9, 304628. [Google Scholar] [CrossRef] [Green Version]
- Raghavendra, C.S.; Sivalingam, K.M.; Znati, T. Wireless Sensor Networks; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Muzzammil, M.; Ahmed, N.; Qiao, G.; Ullah, I.; Wan, L. Fundamentals and advancements of magnetic-field communication for underwater wireless sensor networks. IEEE Trans. Antennas Propag. 2020, 68, 7555–7570. [Google Scholar] [CrossRef]
- Singh, S.P.; Sharma, S.C. Range free localization techniques in wireless sensor networks: A review. Procedia Comput. Sci. 2015, 57, 7–16. [Google Scholar] [CrossRef] [Green Version]
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T. Range-free localization schemes for large scale sensor networks. In Proceedings of the 9th Annual International Conference on Mobile Computing and Networking, Diego, CA, USA, 14–19 September 2003; pp. 81–95. [Google Scholar]
- He, T.; Huang, C.; Blum, B.; Stankovic, J.; Abdelzaher, T. Range-free localization and its impact on large scale sensor networks. ACM Trans. Embed. Comput. Syst. 2005, 4, 877–906. [Google Scholar] [CrossRef]
- Manzoor, R. Energy efficient localization in wireless sensor networks using noisy measurements. Record 2010, 2010, 827–831. [Google Scholar]
- Stoleru, R.; He, T.; Stankovic, S. Secure Localization and Time Synchronization for Wireless Sensor and Ad Hoc Networks; Range-Free Localization Advance Information Security Series; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007; Volume 30. [Google Scholar]
- Zhang, Y.; Wu, W.; Chen, Y. A range-based localization algorithm for wireless sensor networks. J. Commun. Netw. 2005, 7, 429–437. [Google Scholar] [CrossRef]
- Almuzaini, K.K.; Gulliver, A. Range-based localization in wireless networks using density-based outlier detection. Wirel. Sens. Netw. 2010, 2, 807. [Google Scholar] [CrossRef] [Green Version]
- Mekelleche, F.; Haffaf, H. Classification and Comparison of Range-Based Localization Techniques in Wireless Sensor Networks. J. Commun. 2017, 12, 221–227. [Google Scholar] [CrossRef] [Green Version]
- Zanca, G.; Zorzi, F.; Zanella, A.; Zorzi, M. Experimental comparison of RSSI-based localization algorithms for indoor wireless sensor networks. In Proceedings of the Workshop on Real-World Wireless Sensor Networks, Glasgow, Scotland, 1 April 2008; pp. 1–5. [Google Scholar]
- Abrudan, T.E.; Xiao, Z.; Markham, A.; Trigoni, N.; Sensing, R. Underground incrementally deployed magneto-inductive 3-D positioning network. IEEE Trans. Geosci. 2016, 54, 4376–4391. [Google Scholar] [CrossRef]
- Markham, A.; Trigoni, N.; Macdonald, D.W.; Ellwood, S.A. Underground localization in 3-D using magneto-inductive tracking. IEEE Sens. J. 2011, 12, 1809–1816. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Zheng, Y.R. Node localization in 3-D by magnetic-induction communications in wireless sensor networks. In Proceedings of the OCEANS 2017-Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–6. [Google Scholar]
- Wahlström, J.; Kok, M.; de Gusmao, P.P.B.; Abrudan, T.E.; Trigoni, N.; Markham, A. Sensor fusion for magneto-inductive navigation. IEEE Sens. J. 2019, 20, 386–396. [Google Scholar] [CrossRef] [Green Version]
- Baffelli, S. Localization of Low Complexity Communication Devices Based on Mutual Inductive Coupling. Master’s Thesis, Communication Technology Laboratory Wireless Communications Group, Swiss Fedral Institute of Technology, Zurich, Switzerland, 2013. [Google Scholar]
- Tan, X.; Sun, Z.; Wang, P.; Sun, Y. Environment-aware localization for wireless sensor networks using magnetic induction. Ad Hoc Netw. 2020, 98, 102030. [Google Scholar] [CrossRef]
- Ahmed, N.; Radchenko, A.; Pommerenke, D.; Zheng, Y.R. Design and evaluation of low-cost and energy-efficient magneto-inductive sensor nodes for wireless sensor networks. IEEE Syst. J. 2018, 13, 1135–1144. [Google Scholar] [CrossRef]
- Gaoding, N.; Bousquet, J.-F. A compact magneto-inductive coil antenna design for underwater communications. In Proceedings of the International Conference on Underwater Networks & Systems, Halifax, NS, Canada, 6–8 November 2017; pp. 1–5. [Google Scholar]
- Huang, H.; Zheng, Y.R. 3-D localization of wireless sensor nodes using near-field magnetic-induction communications. Phys. Commun. 2018, 30, 97–106. [Google Scholar] [CrossRef]
- Yabukami, S.; Kikuchi, H.; Yamaguchi, M.; Arai, K.; Takahashi, K.; Itagaki, A.; Wako, N. Motion capture system of magnetic markers using three-axial magnetic field sensor. IEEE Trans. Magn. 2000, 36, 3646–3648. [Google Scholar] [CrossRef]
- Hu, C.; Meng, M.Q.-H.; Mandal, M. The calibration of 3-axis magnetic sensor array system for tracking wireless capsule endoscope. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 162–167. [Google Scholar]
- Hu, C.; Meng, M.Q.-H.; Mandal, M. A linear algorithm for tracing magnet position and orientation by using three-axis magnetic sensors. IEEE Trans. Magn. 2007, 43, 4096–4101. [Google Scholar]
- Schlageter, V.; Besse, P.-A.; Popovic, R.; Kucera, P. Tracking system with five degrees of freedom using a 2D-array of Hall sensors and a permanent magnet. Sens. Actuators A Phys. 2001, 92, 37–42. [Google Scholar] [CrossRef]
- Hu, C.; Song, S.; Wang, X.; Meng, M.Q.-H.; Li, B. A novel positioning and orientation system based on three-axis magnetic coils. IEEE Trans. Magn. 2012, 48, 2211–2219. [Google Scholar] [CrossRef]
- Hu, C.; Meng, M.Q.-H.; Song, S.; Dai, H. A six-dimensional magnetic localization algorithm for a rectangular magnet objective based on a particle swarm optimizer. IEEE Trans. Magn. 2009, 45, 3092–3099. [Google Scholar]
- Song, S.; Hu, C.; Li, M.; Yang, W.; Meng, M.Q.-H. Real time algorithm for magnet’s localization in capsule endoscope. In Proceedings of the 2009 IEEE International Conference on Automation and Logistics, Shenyang, China, 5–7 August 2009; pp. 2030–2035. [Google Scholar]
- Raab, F.H.; Blood, E.B.; Steiner, T.O.; Jones, H.R. Magnetic position and orientation tracking system. IEEE Trans. Aerosp. Electron. Syst. 1979, 5, 709–718. [Google Scholar] [CrossRef]
- Paperno, E.; Sasada, I.; Leonovich, E. A new method for magnetic position and orientation tracking. IEEE Trans. Magn. 2001, 37, 1938–1940. [Google Scholar] [CrossRef]
- Fujieda, M.; Tateno, H.; Nara, T.; Hashimoto, M. Discrete Fourier coil for localization of a magnetic dipole. In Proceedings of the SICE Annual Conference, Tokyo, Japan, 13–18 September 2011; pp. 2345–2349. [Google Scholar]
- Nara, T.; Takanashi, Y.; Watanabe, H. Two-dimensional localization of a magnetic dipole from its first order Fourier coefficients of the magnetic flux density. In Proceedings of the SICE Annual Conference, Taipei, Taiwan, 18–21 August 2010; pp. 3219–3222. [Google Scholar]
- Nara, T.; Takanashi, Y.; Mizuide, M. A sensor measuring the Fourier coefficients of the magnetic flux density for pipe crack detection using the magnetic flux leakage method. J. Appl. Phys. 2011, 109, 07E305. [Google Scholar] [CrossRef]
- Caffey, T.W.; Romero, L. Locating a buried magnetic dipole. IEEE Trans. Geosci. Remote Sens. 1982, 2, 188–192. [Google Scholar] [CrossRef]
- Andrä, W.; Danan, H.; Kirmße, W.; Kramer, H.-H.; Saupe, P.; Schmieg, R.; Bellemann, M.E. A novel method for real-time magnetic marker monitoring in the gastrointestinal tract. Phys. Med. Biol. 2000, 45, 3081–3093. [Google Scholar] [CrossRef] [PubMed]
- Hashi, S.; Yabukami, S.; Kanetaka, H.; Ishiyama, K.; Arai, K.I. Wireless magnetic position-sensing system using optimized pickup coils for higher accuracy. IEEE Trans. Magn. 2011, 47, 3542–3545. [Google Scholar] [CrossRef]
- Guo, H.; Sun, Z. M2I communication: From theoretical modeling to practical design. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala, Lumpur, 23–27 May 2016; pp. 1–6. [Google Scholar]
- Guo, H.; Sun, Z.; Zhou, C. Practical design and implementation of metamaterial-enhanced magnetic induction communication. IEEE Access 2017, 5, 17213–17229. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| S. No | Technology | Description | Limitation |
|---|---|---|---|
| 1 | TOA | This technique is based on the measurement of time of transmission and reception of signals between both Tx and Rx nodes. | Magnetic field lines cannot be measured in terms of time, because they do not propagate like electromagnetic, optical, and acoustic waves. |
| 2 | TDOA | This technique requires a minimum of two Tx signals to be received by Rx nodes. The difference between both the times of received signals is the estimated position. | Magnetic field lines cannot be measured in terms of time because, they do not propagate like electromagnetic, optical, and acoustic waves. |
| 3 | AOA | This technique requires a line of bearing for communication. | Magneto-inductive communication is in research phases to be able to have a line of bearing. |
| 4 | RSSI | RSSI measures the signal strength in dB at a given instant. Therefore, RSSI technique is the only candidate that can be used for localization in MI-UWSNs. | This technique provides no limitation for MI-UWSNs. |
| S. No | Number of Tx Nodes | 1 Rx Node | 2 Rx Node | 3 Rx Node | 4 Rx Node | 5 Rx Node | 6 Rx Node | 7 Rx Node | 8 Rx Node | 9 Rx Node | 10 Rx Node |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2Tx nodes ((C_1C_1)(C_2C_1)) | 90.26% | 89.4% | 88.2% | 86.8% | 83.33% | 81.66% | 80.13% | 79.2% | 77.3% | 76.86% |
| 2 | 2Tx nodes (C_1C_2) | 65.3% | 64.6% | 61.67% | 60.73% | 59% | 56.26% | 53.66% | 52.86% | 52.2% | 51.6% |
| 3 | 2Tx nodes (C_2C_2) | 78.6% | 77.6% | 76.26% | 75% | 73.73% | 72.46% | 70.93% | 72.2% | 66.6% | 64.86% |
| 4 | 3Tx nodes ((C_1C_1)(C_2C_1)) | 93.26% | 91.8% | 91% | 90.73% | 90.06% | 88.3% | 87.4% | 87% | 86.53% | 85.8% |
| 5 | 3Tx nodes (C_1C_2) | 78.6% | 77.5% | 76.86% | 76.06% | 75% | 74.2% | 71.6% | 69.6% | 68.13% | 66.8% |
| 6 | 3Tx nodes (C_2C_2) | 82% | 84.73% | 83.6% | 83.26% | 82.46% | 81.6% | 80.73% | 80.26% | 79.93% | 79.13% |
| 7 | 4Tx nodes ((C_1C_1)(C_2C_1)) | 96.53% | 96.26% | 96.06% | 95.8% | 95.6% | 95.4% | 95.26% | 95.2% | 95.06% | 94.93% |
| 8 | 4Tx nodes (C_1C_2) | 84.6% | 84.2% | 83.6% | 80.46% | 79.13% | 76.26% | 74.73% | 73.53% | 72.6% | 71.73% |
| 9 | 4Tx nodes (C_2C_2) | 88.6% | 87.26% | 86% | 84% | 82% | 8.53% | 79.13% | 78.26% | 77.53% | 77.3% |
| 10 | 8Tx nodes ((C_1C_1)(C_2C_1)) | 99.2% | 98.86% | 98.6% | 98.26% | 98.06% | 97.93% | 97.73% | 97.6% | 97.53% | 97.46% |
| 11 | 8Tx nodes (C_1C_2) | 89.53% | 89.13% | 88.6% | 87.86% | 84.86% | 82.93% | 80.93% | 80.06% | 78.46% | 77.06% |
| 12 | 8Tx nodes (C_2C_2) | 90.04% | 89.93% | 89.53% | 89.2% | 88.6% | 88.06% | 87.86% | 87.46% | 87.26% | 87.13% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiao, G.; Muhammad, A.; Muzzammil, M.; Shoaib Khan, M.; Tariq, M.O.; Khan, M.S. Addressing the Directionality Challenge through RSSI-Based Multilateration Technique, to Localize Nodes in Underwater WSNs by Using Magneto-Inductive Communication. J. Mar. Sci. Eng. 2022, 10, 530. https://doi.org/10.3390/jmse10040530
Qiao G, Muhammad A, Muzzammil M, Shoaib Khan M, Tariq MO, Khan MS. Addressing the Directionality Challenge through RSSI-Based Multilateration Technique, to Localize Nodes in Underwater WSNs by Using Magneto-Inductive Communication. Journal of Marine Science and Engineering. 2022; 10(4):530. https://doi.org/10.3390/jmse10040530
Chicago/Turabian StyleQiao, Gang, Aman Muhammad, Muhammad Muzzammil, Muhammad Shoaib Khan, Muhammad Owais Tariq, and Muhammad Shahbaz Khan. 2022. "Addressing the Directionality Challenge through RSSI-Based Multilateration Technique, to Localize Nodes in Underwater WSNs by Using Magneto-Inductive Communication" Journal of Marine Science and Engineering 10, no. 4: 530. https://doi.org/10.3390/jmse10040530
APA StyleQiao, G., Muhammad, A., Muzzammil, M., Shoaib Khan, M., Tariq, M. O., & Khan, M. S. (2022). Addressing the Directionality Challenge through RSSI-Based Multilateration Technique, to Localize Nodes in Underwater WSNs by Using Magneto-Inductive Communication. Journal of Marine Science and Engineering, 10(4), 530. https://doi.org/10.3390/jmse10040530