PDE Formation and Iterative Docking Control of USVs for the Straight-Line-Shaped Mission


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- In order to complete the formation task of USVs, this paper introduces the PDE as the control algorithm of the formation, and it uses the artificial potential field method to improve the effect of collision during the formation process.
- Aiming at the requirement that USVs can go back to the original location and repeat the docking once the first docking fails, an ILMPC method is proposed that combines the advantages of iterative learning and model prediction control. Repetitive errors can be exploited by iterative learning to obtain precise results, while MPC can overcome environment disturbances via considering the future process costs.
2. Model
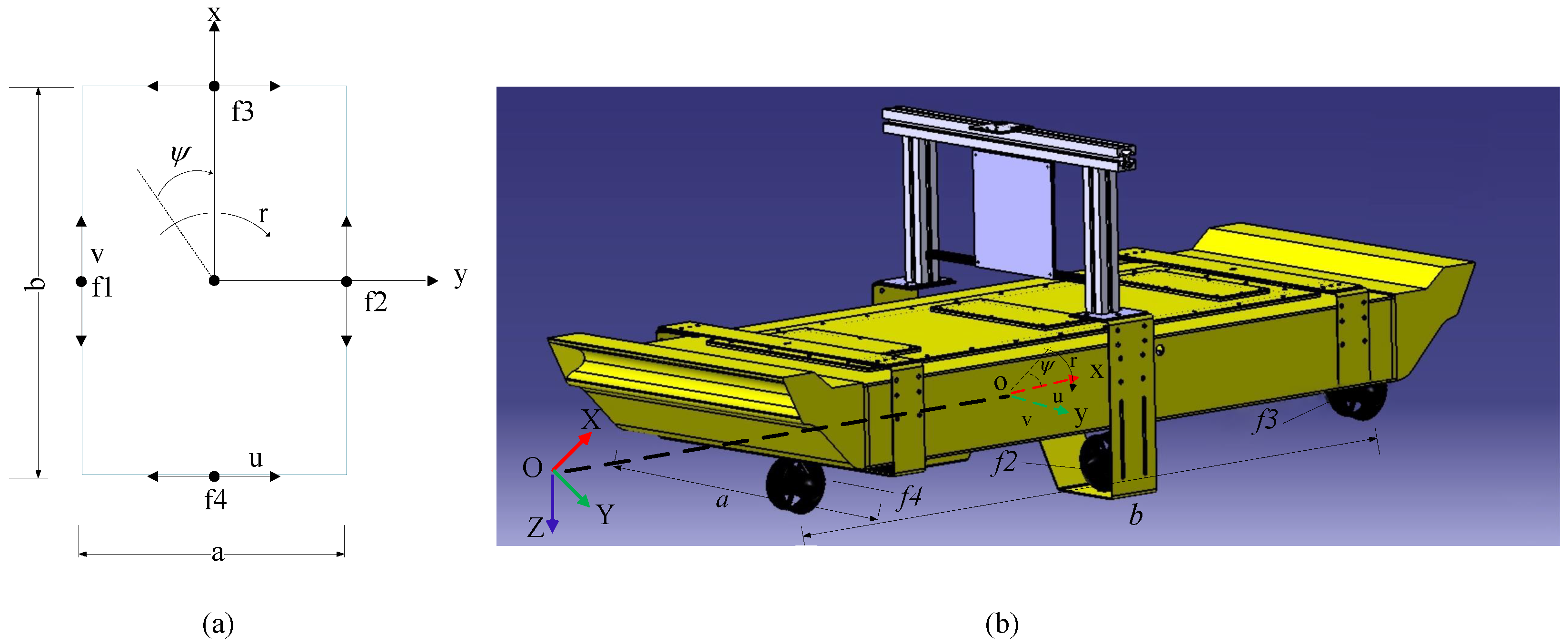
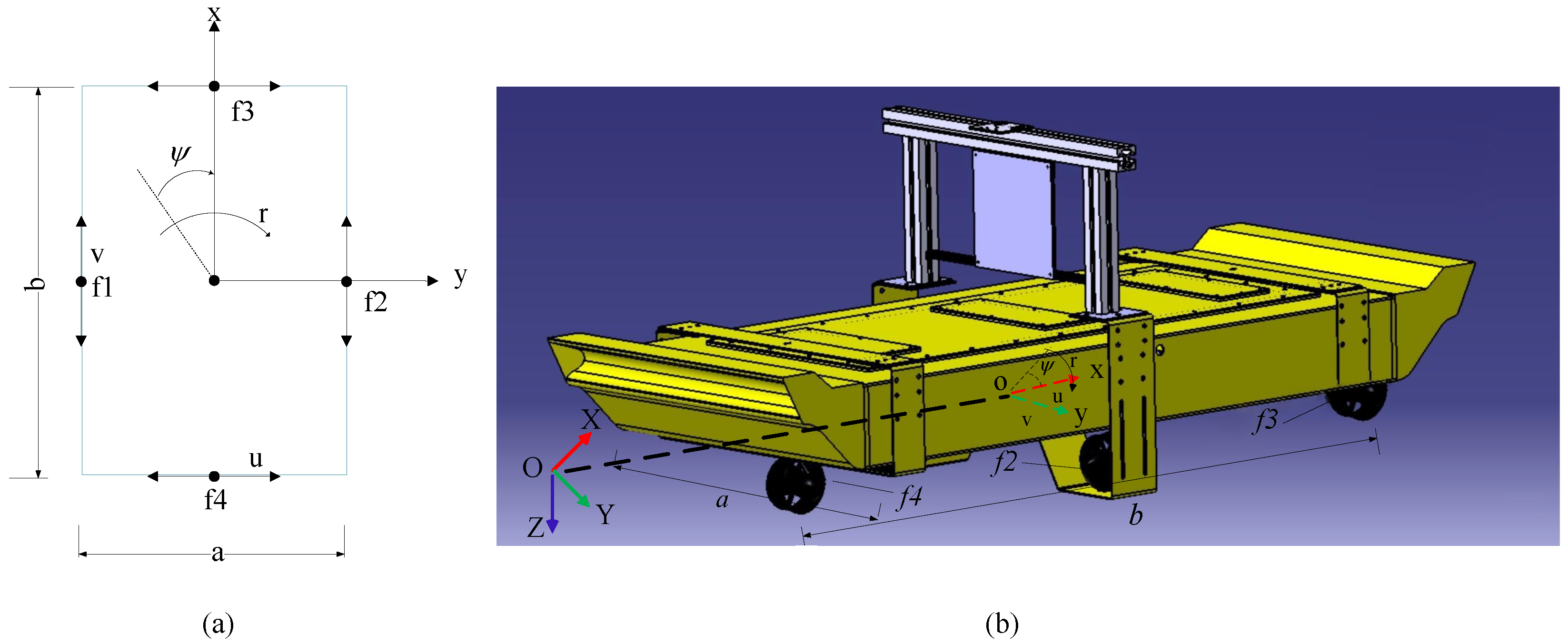
2.1. Design
2.2. Dynamics Model
3. Swarm Formation Control
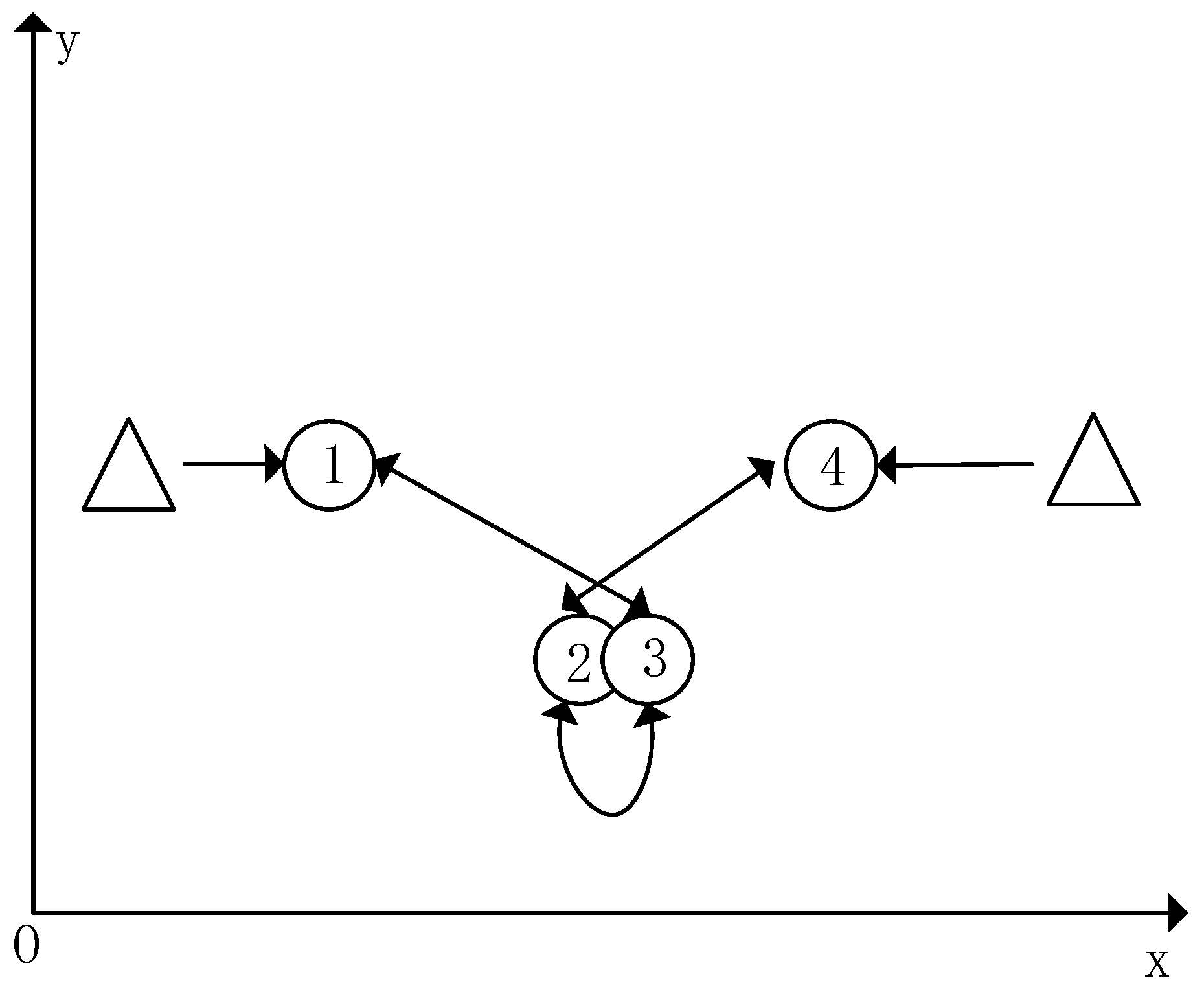
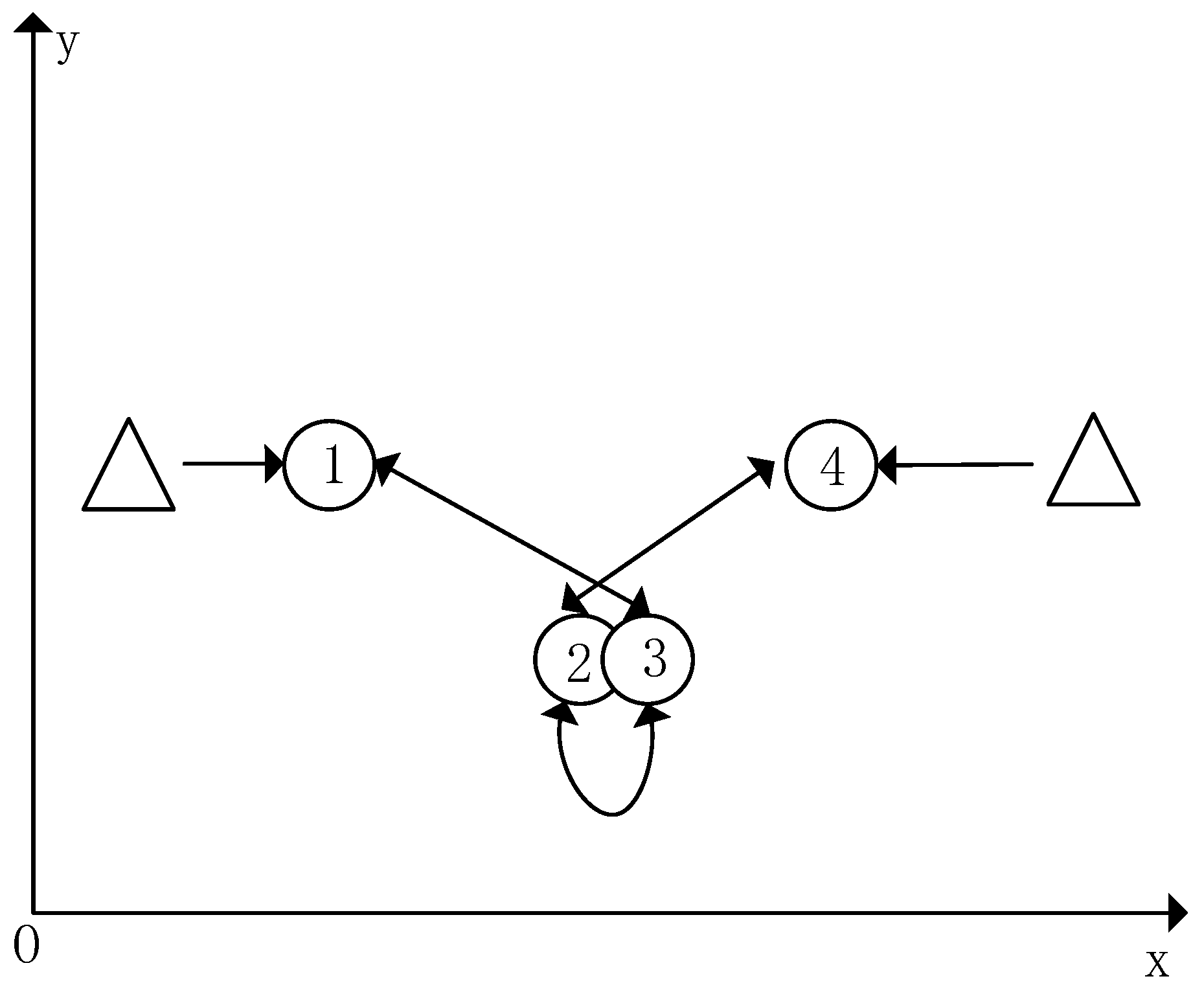
3.1. Formation Control Based on PDE
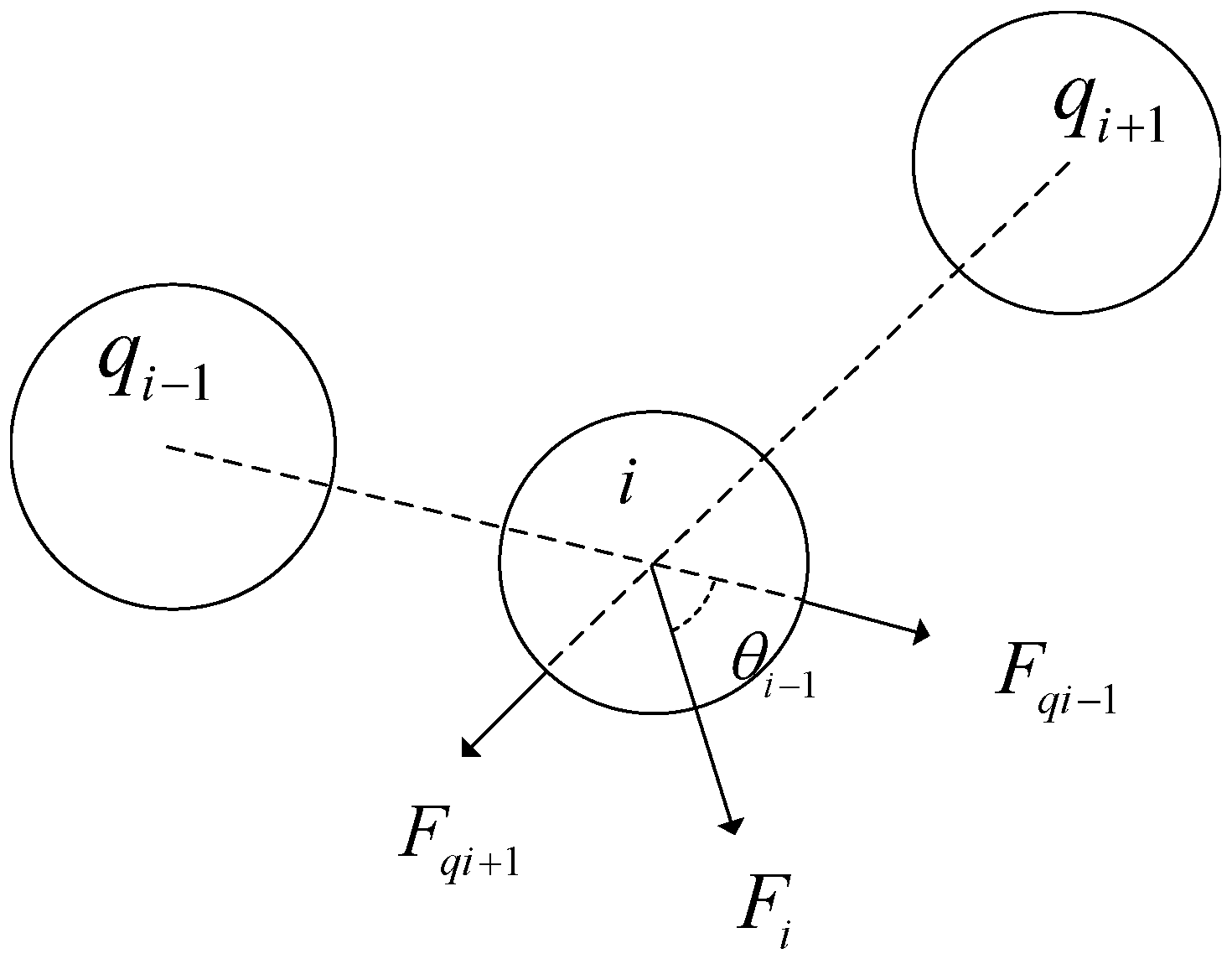
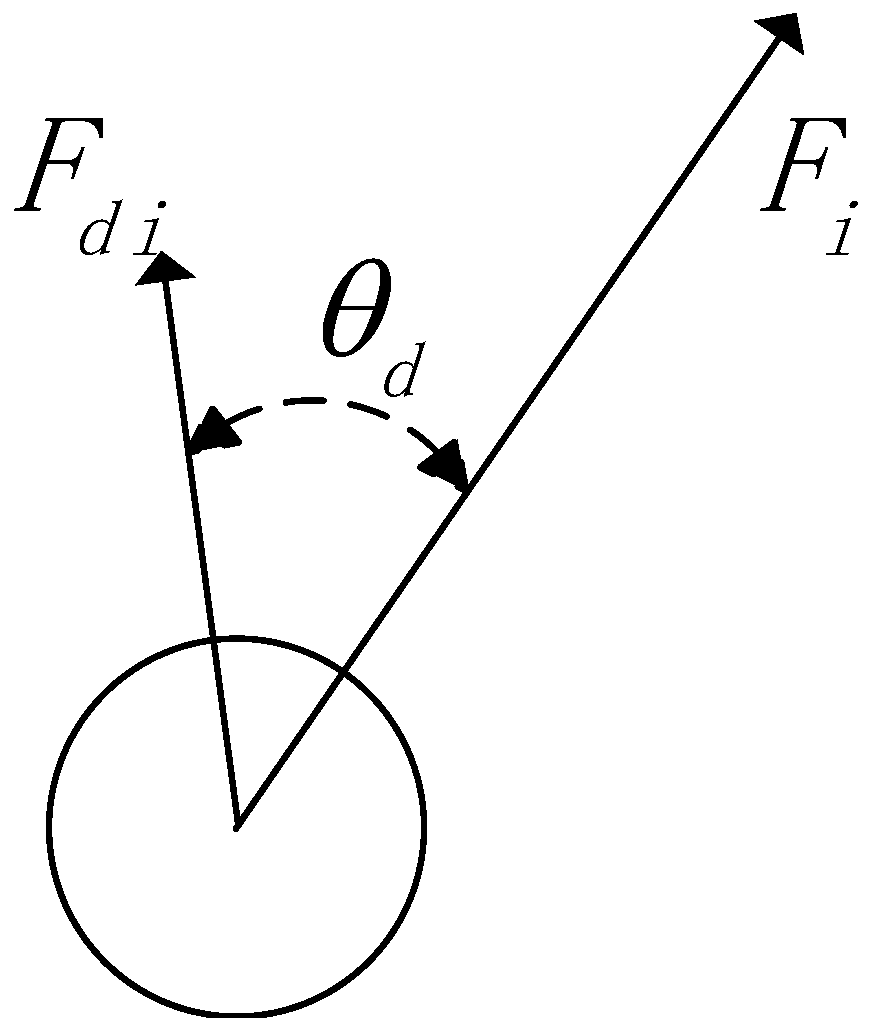
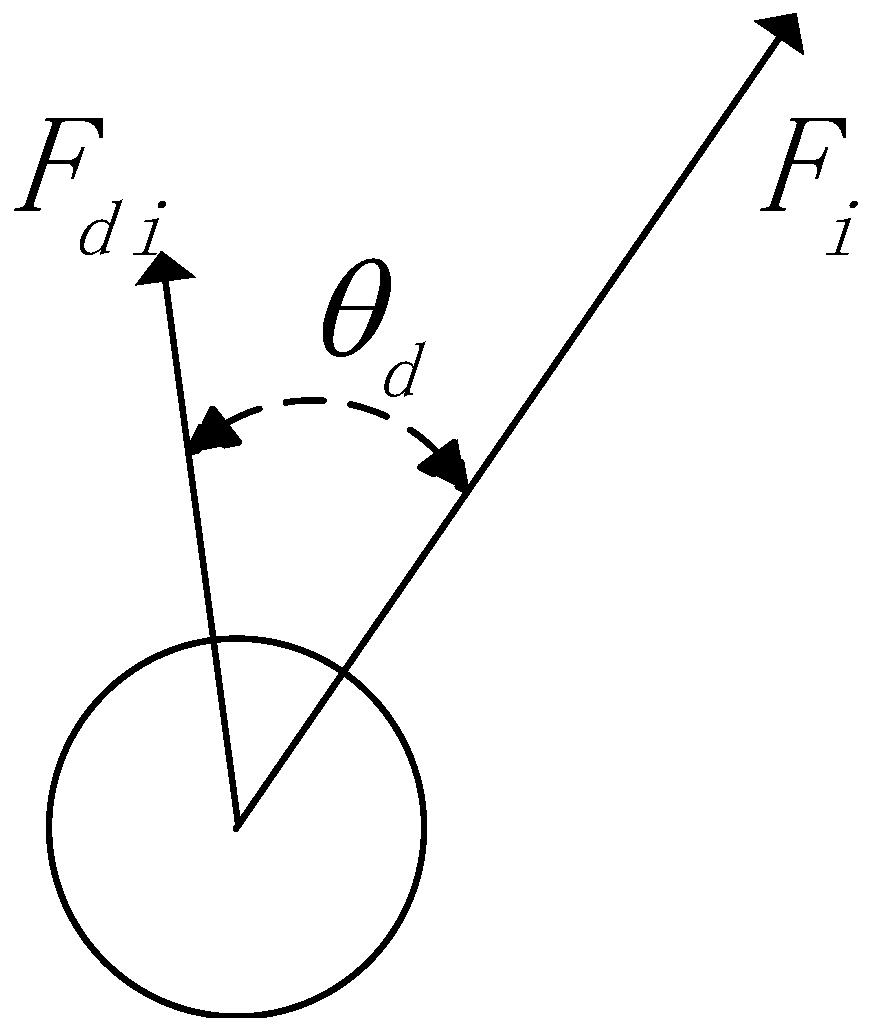
3.2. Formation Collision-Avoidance Control Based on Artificial Potential Field Method
4. Controller Design
4.1. Nonlinear Model Predictive Control
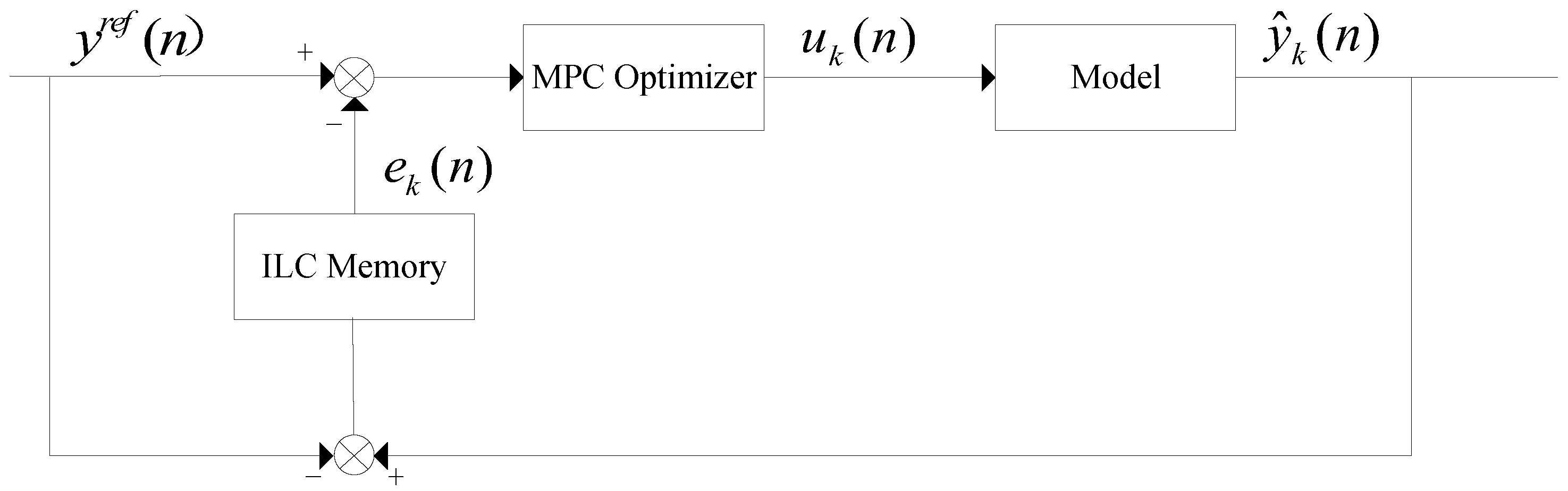
4.2. Iterative Learning-Based Model Predictive Control
5. Numerical Simulation
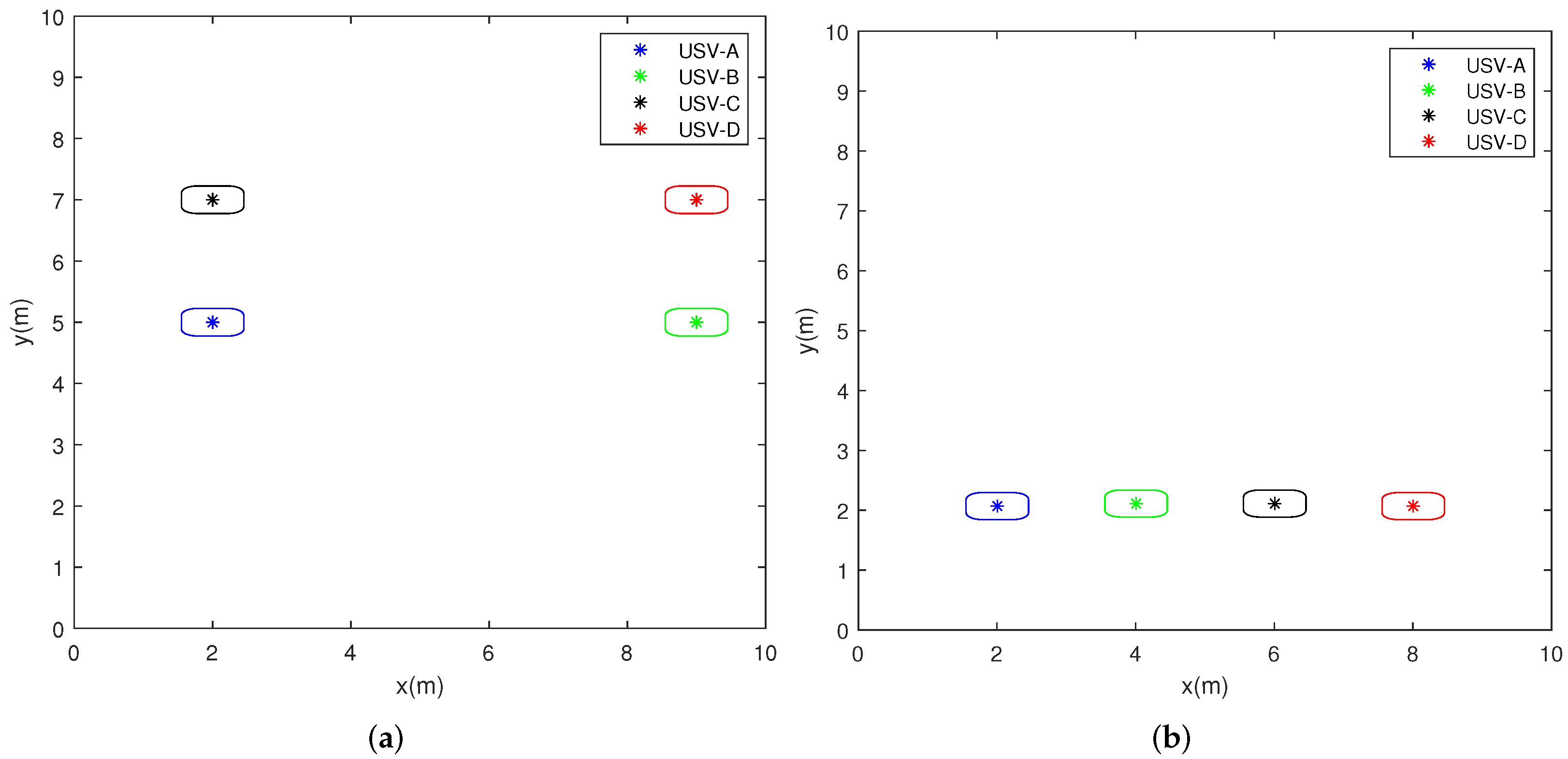
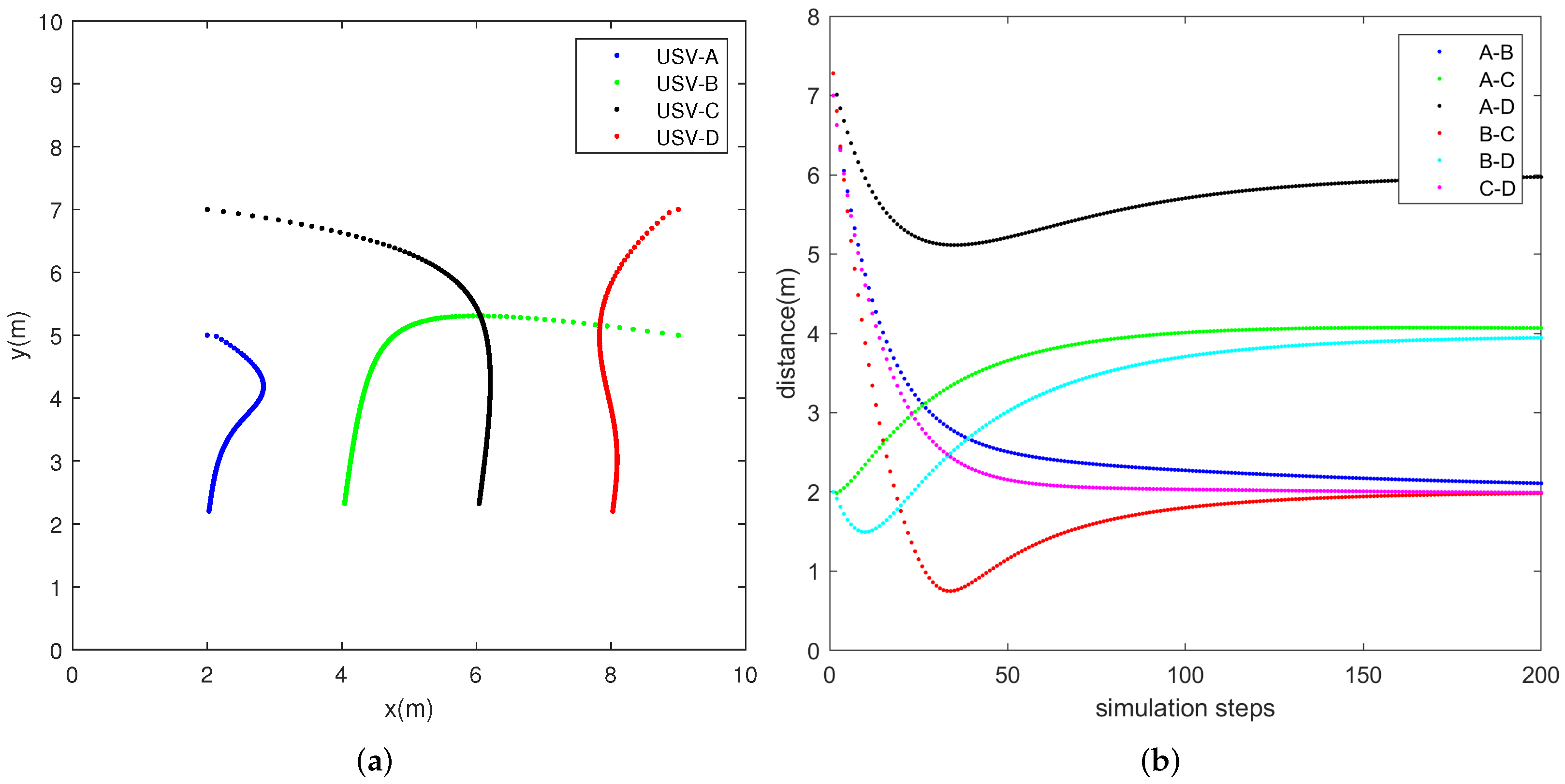
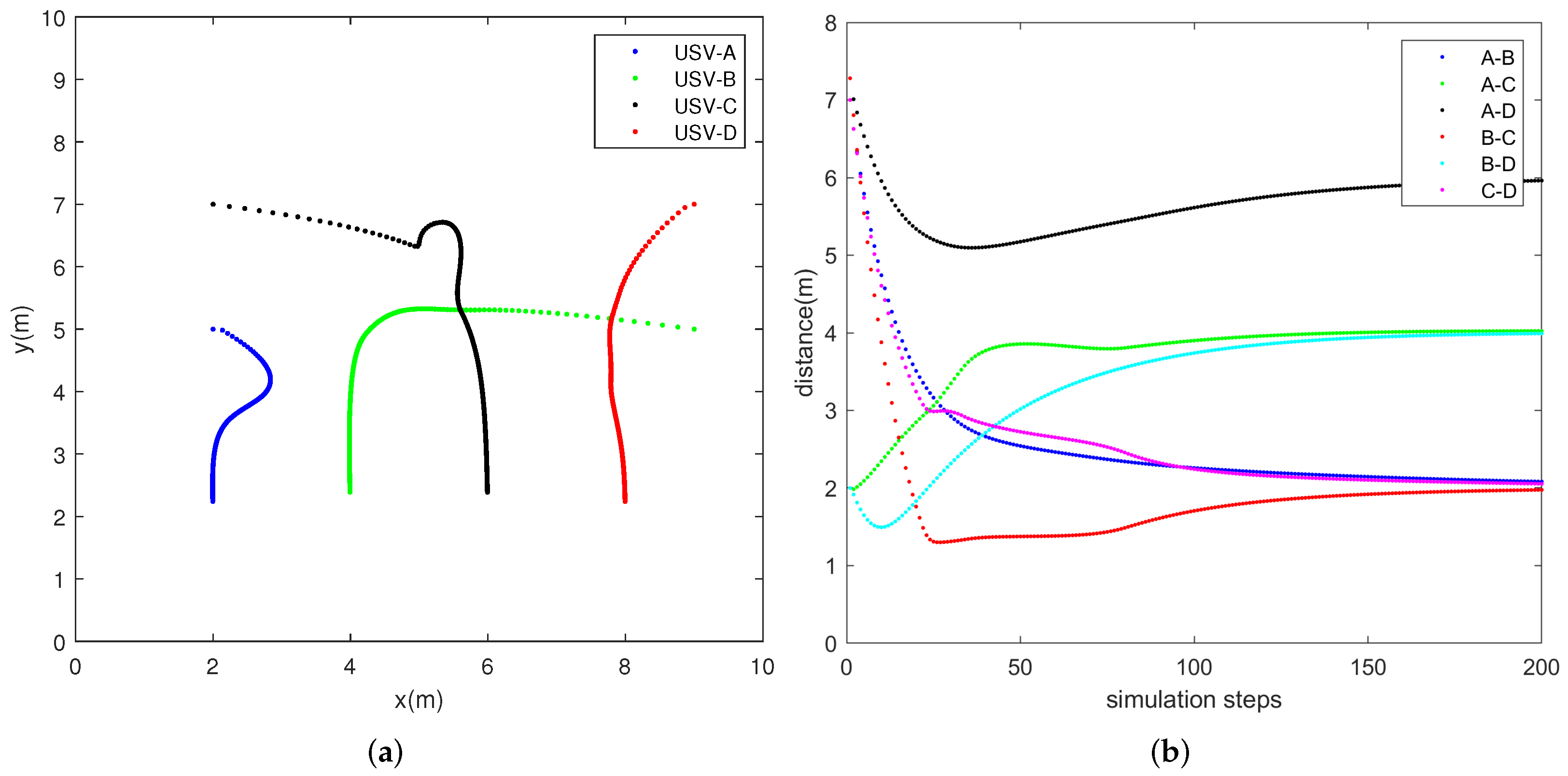
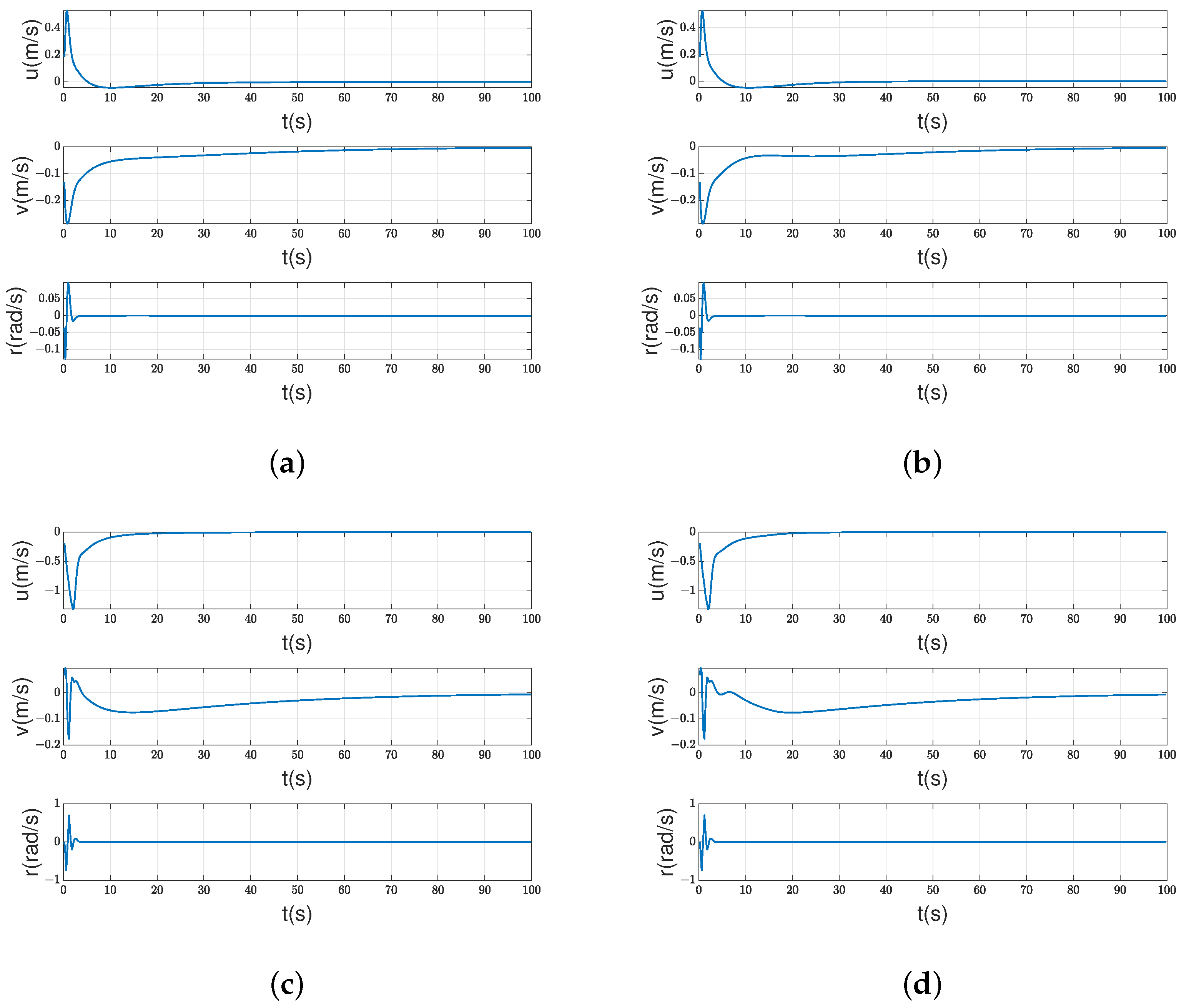
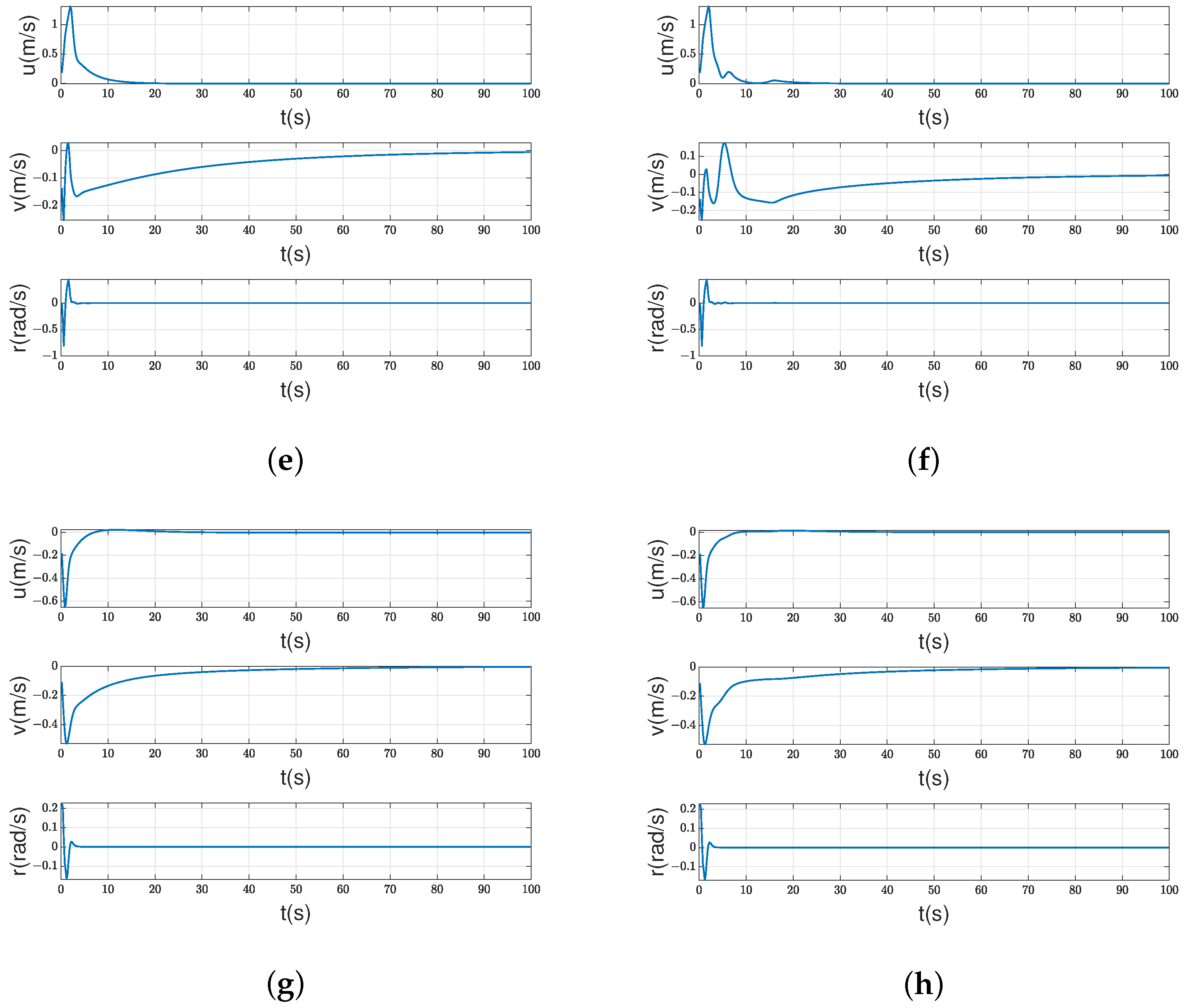
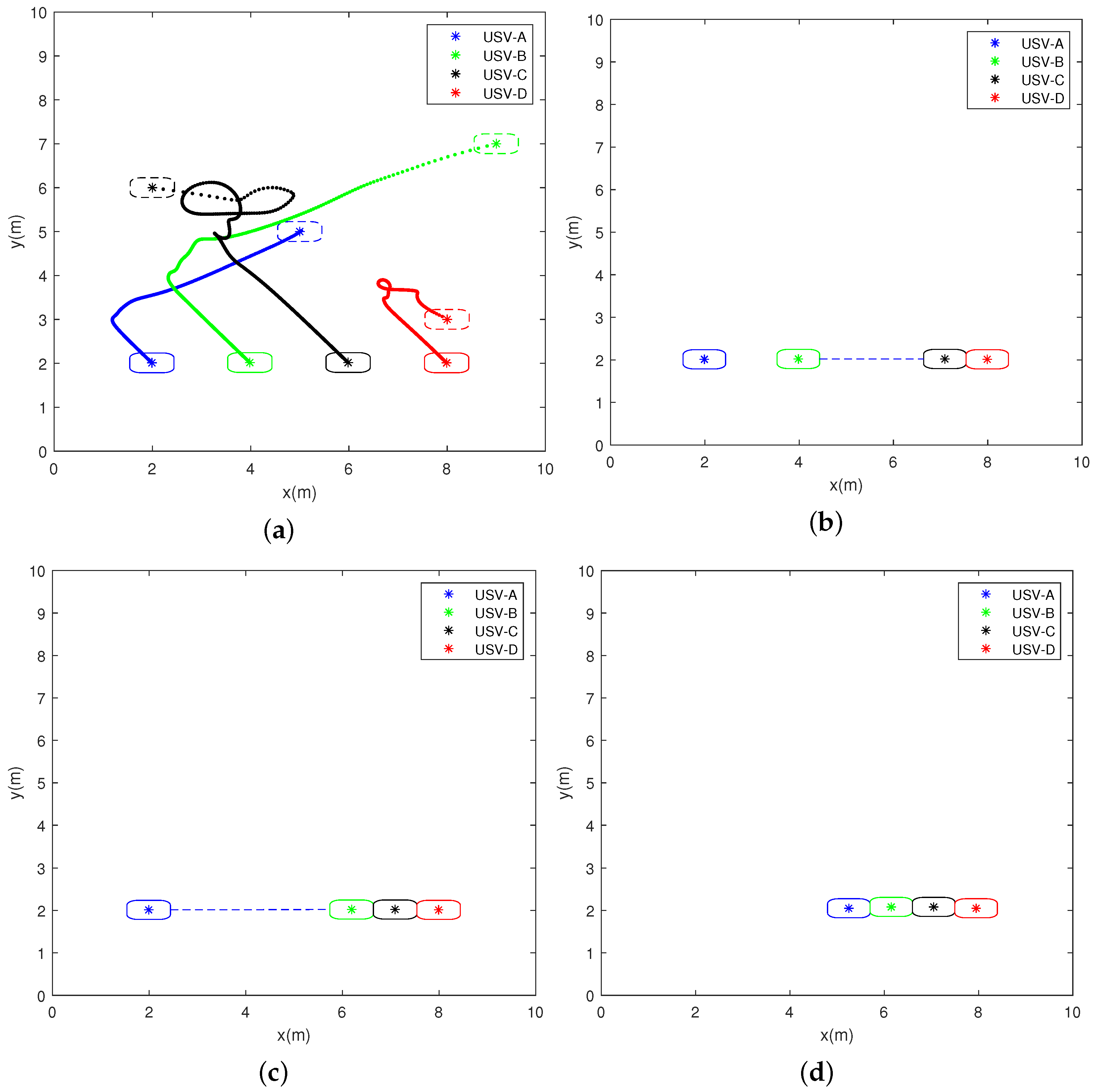
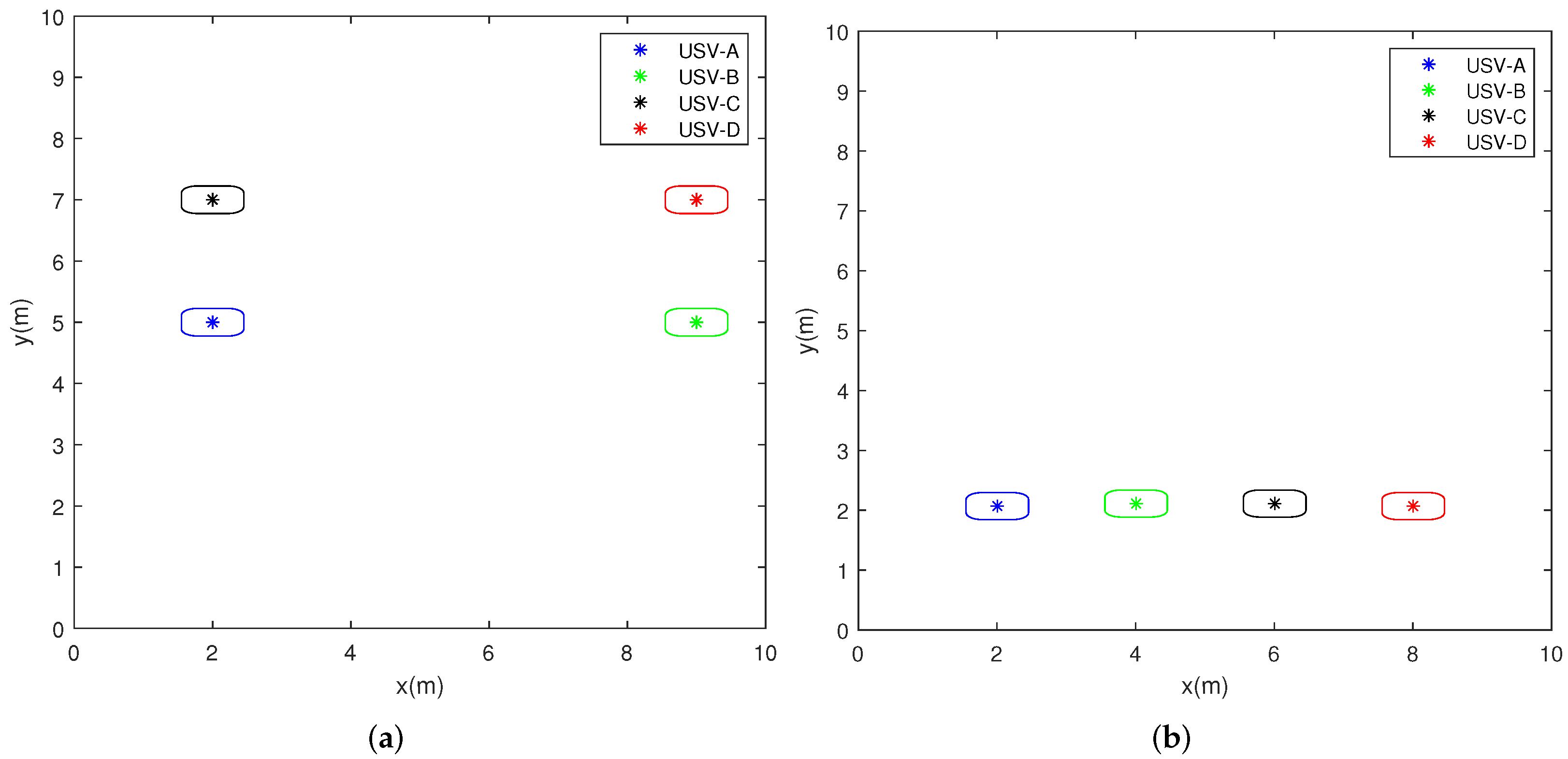
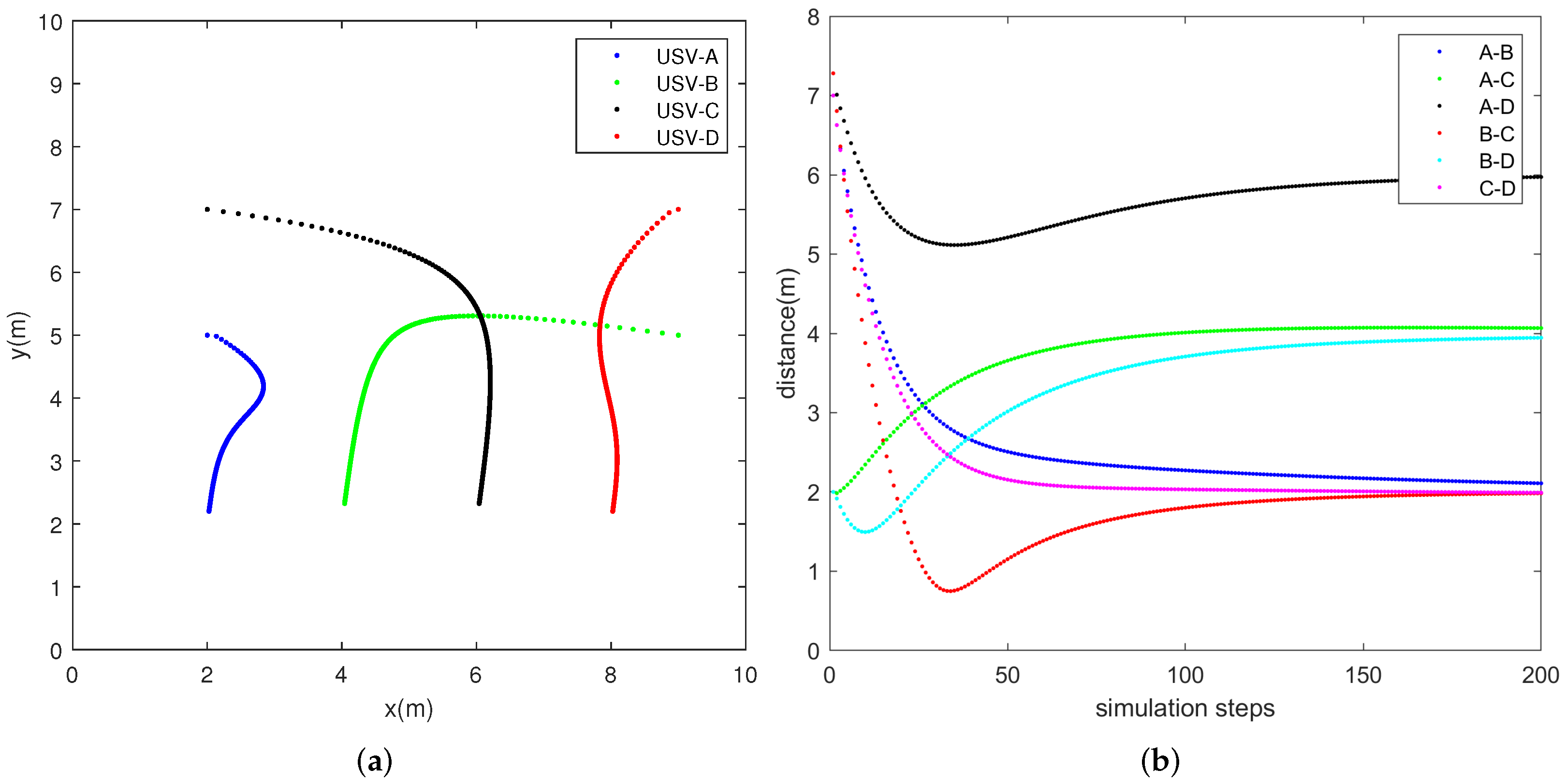
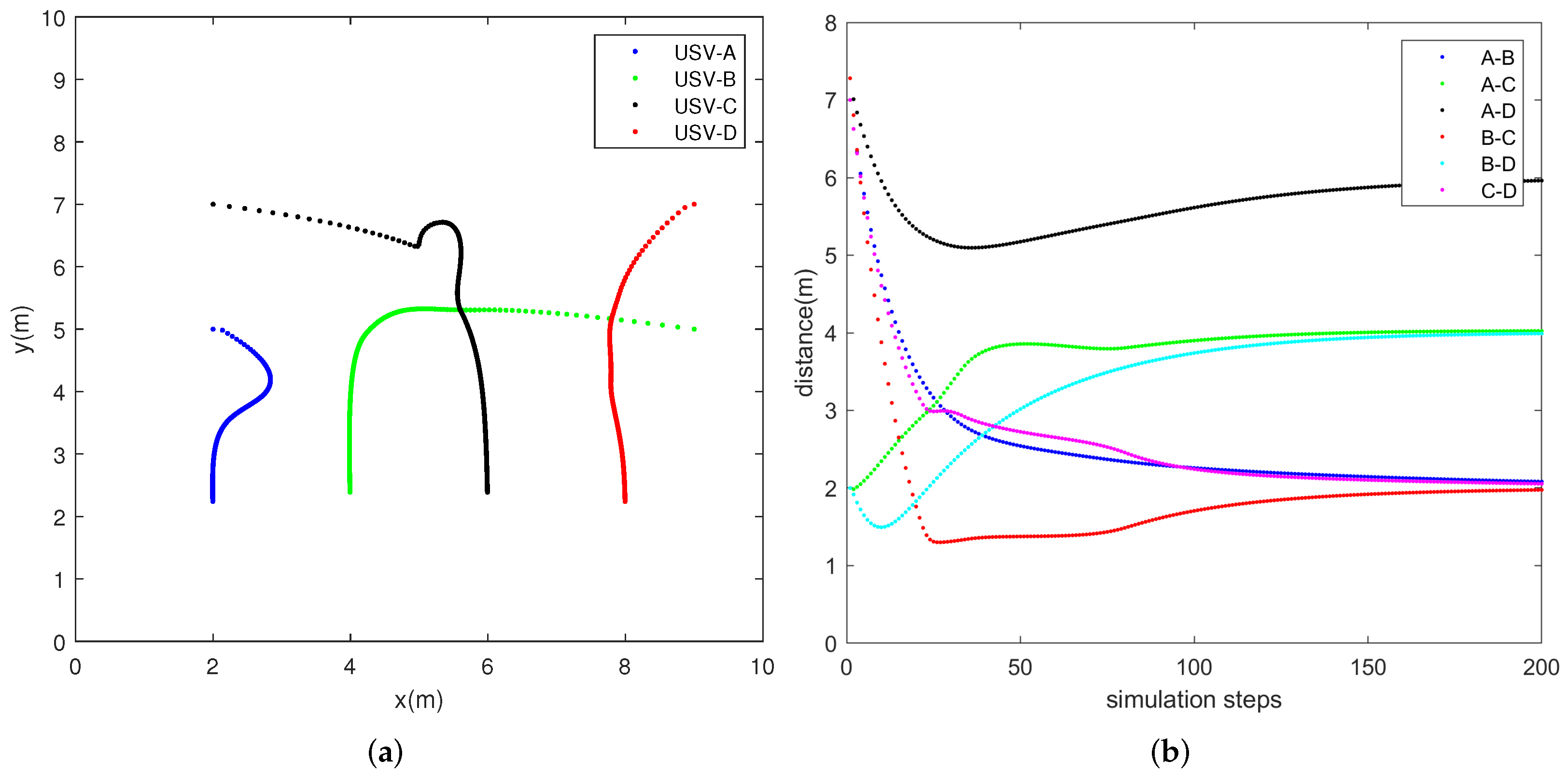
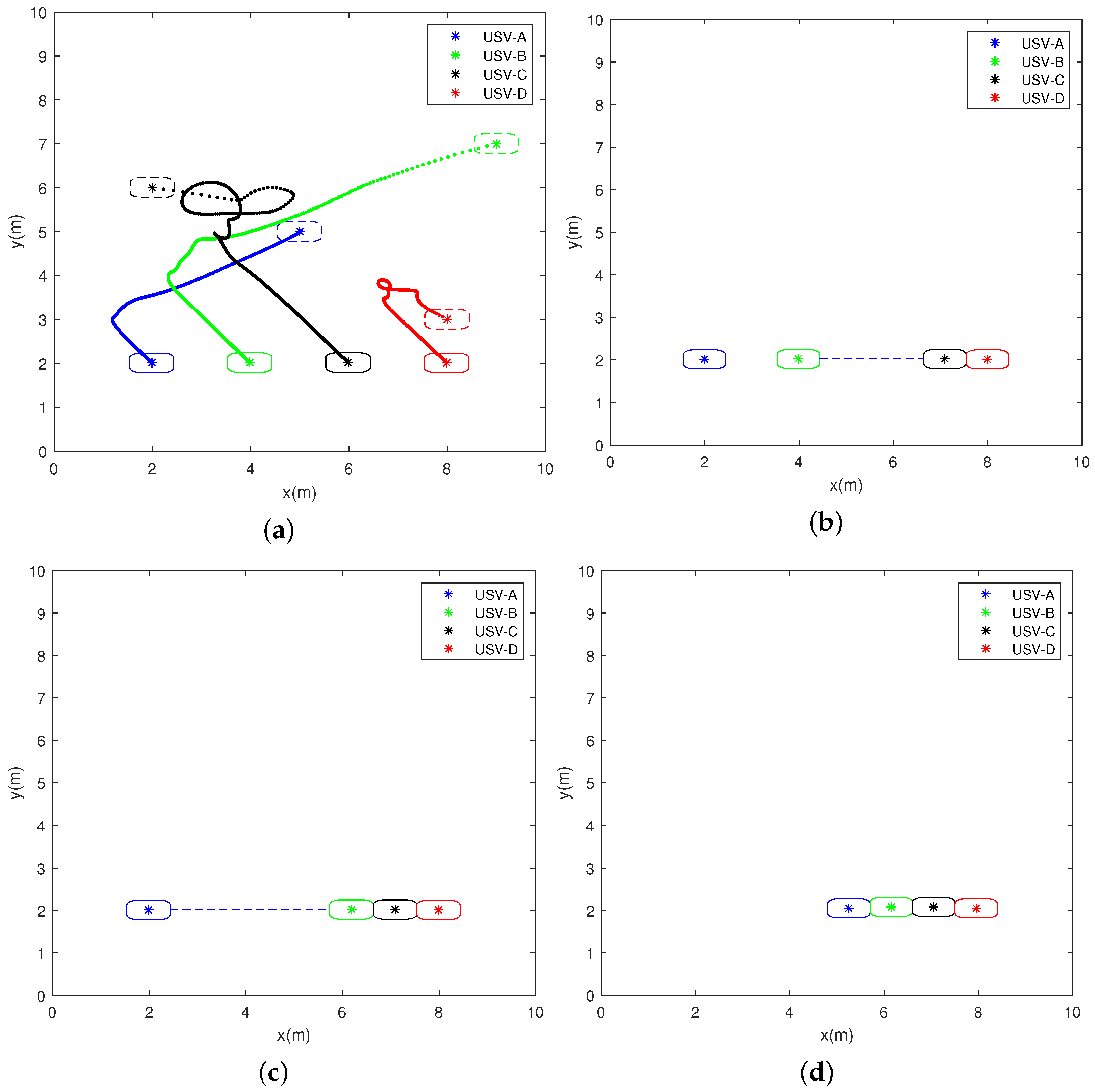
5.1. Formation Simulation
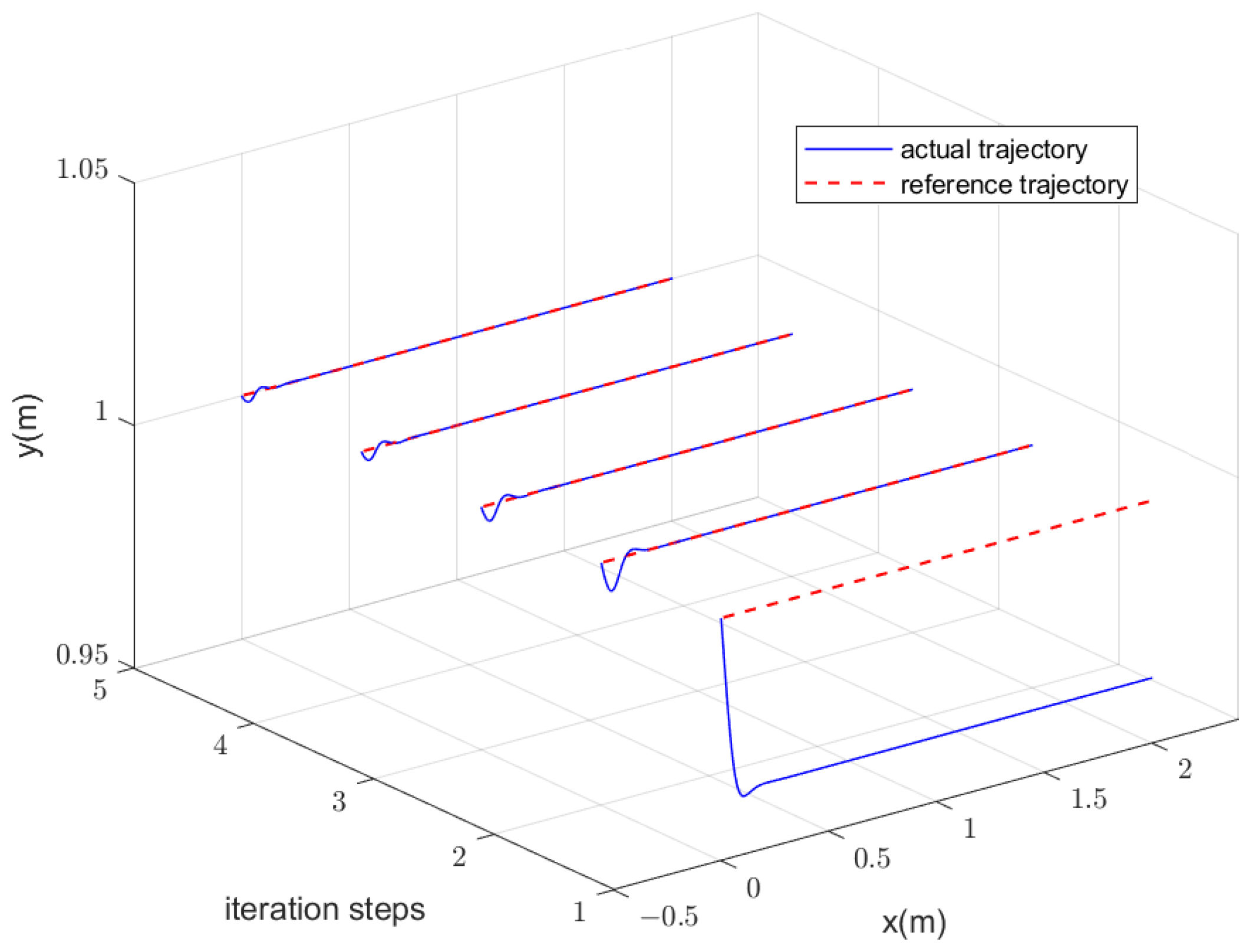
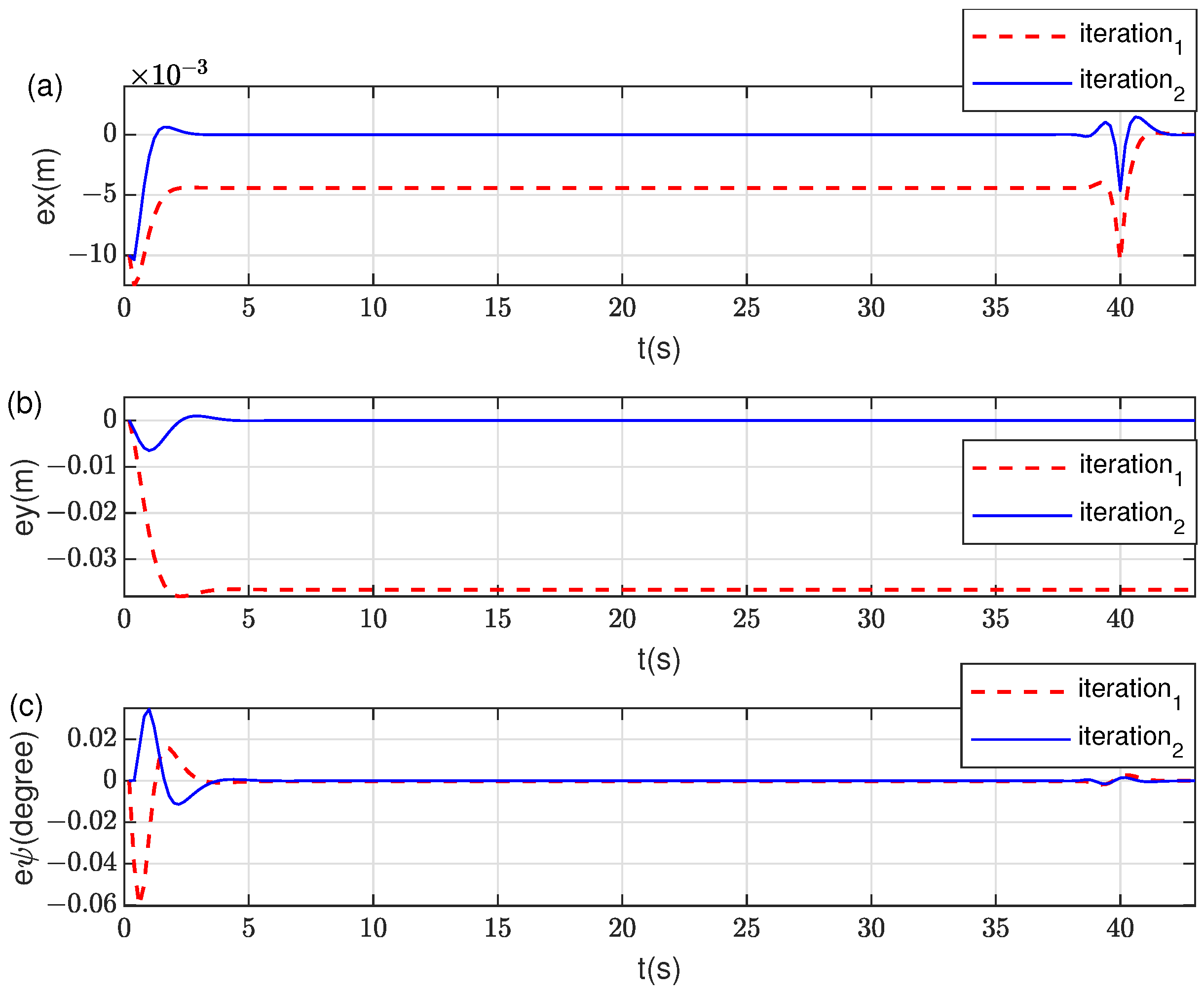
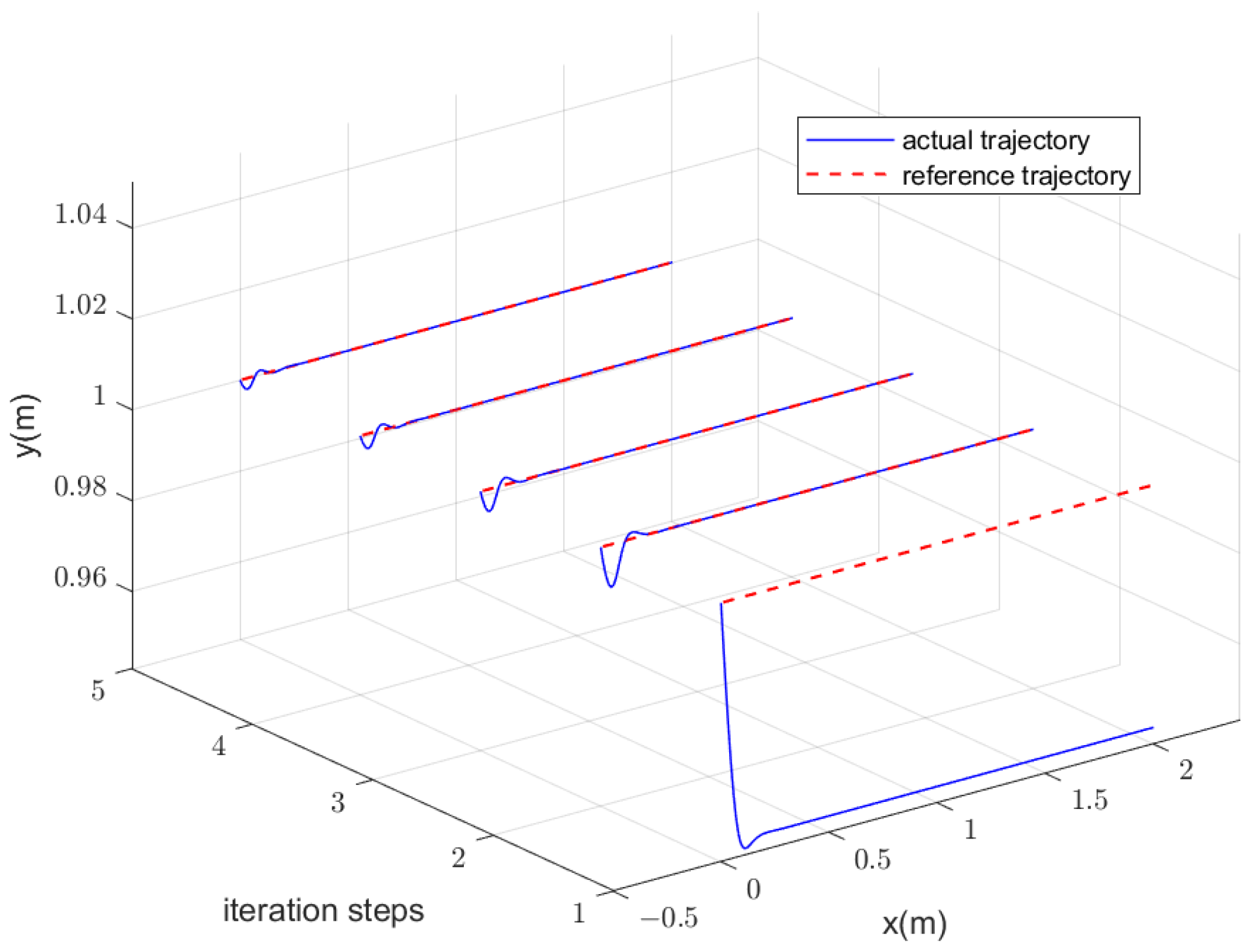
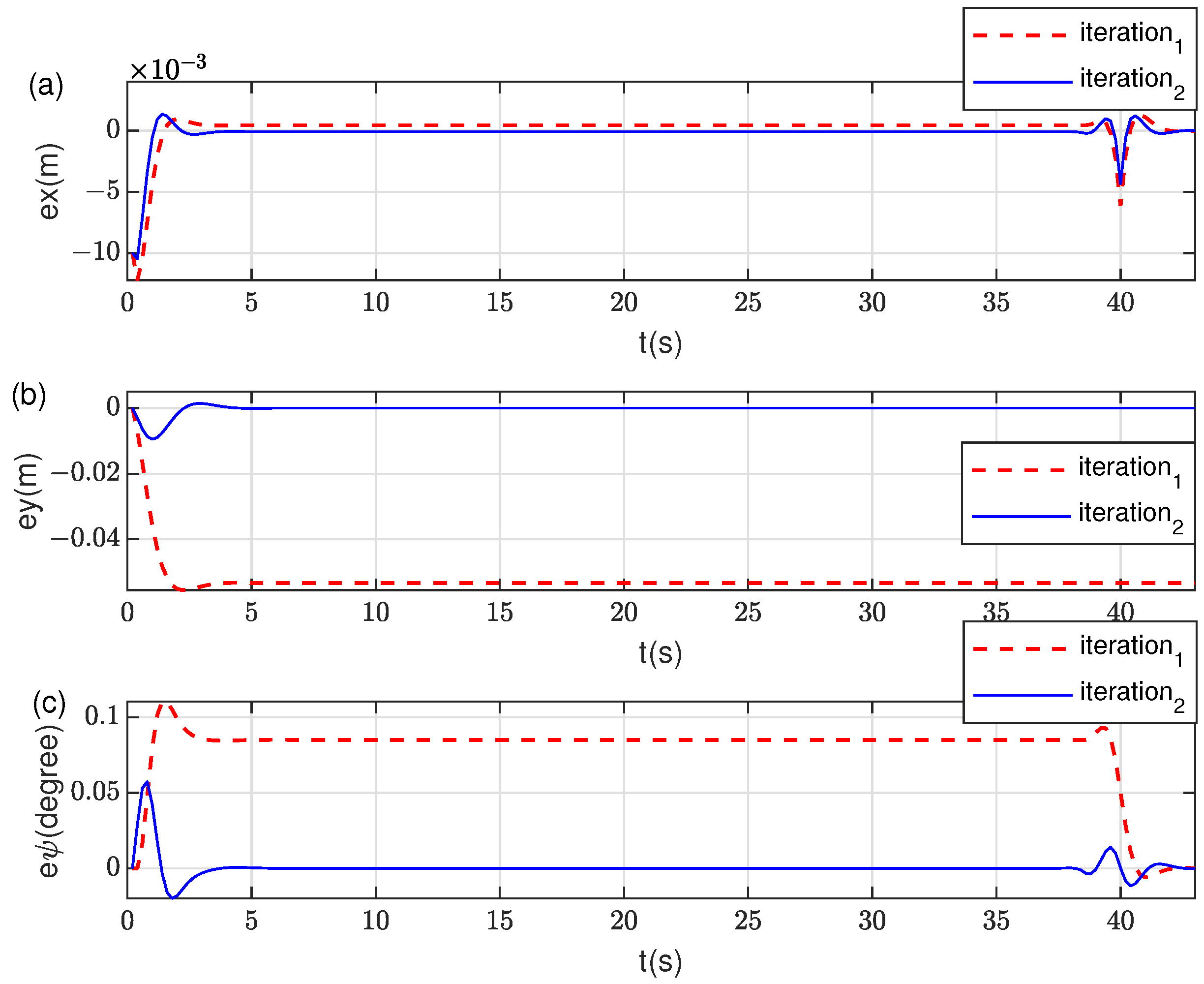
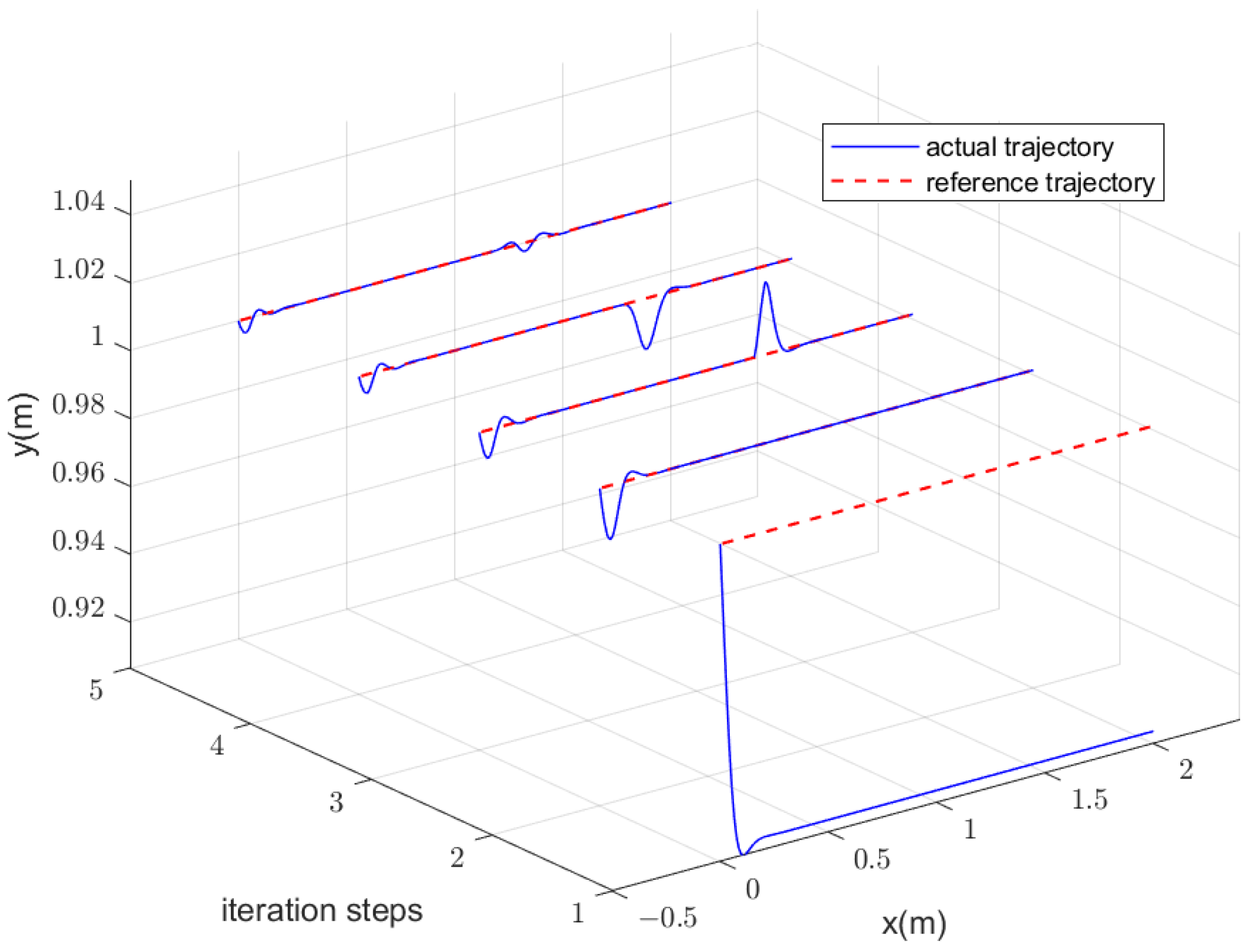
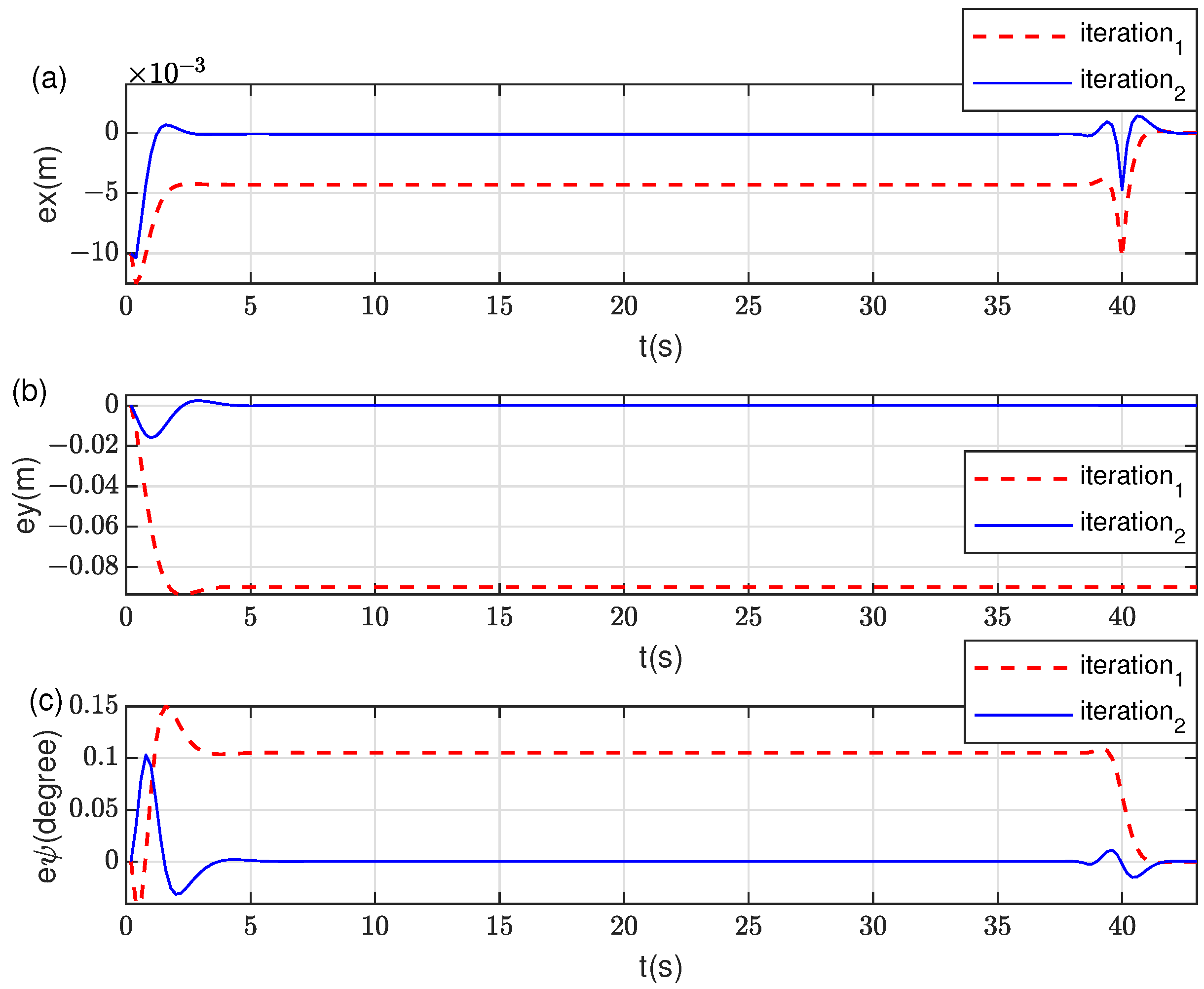
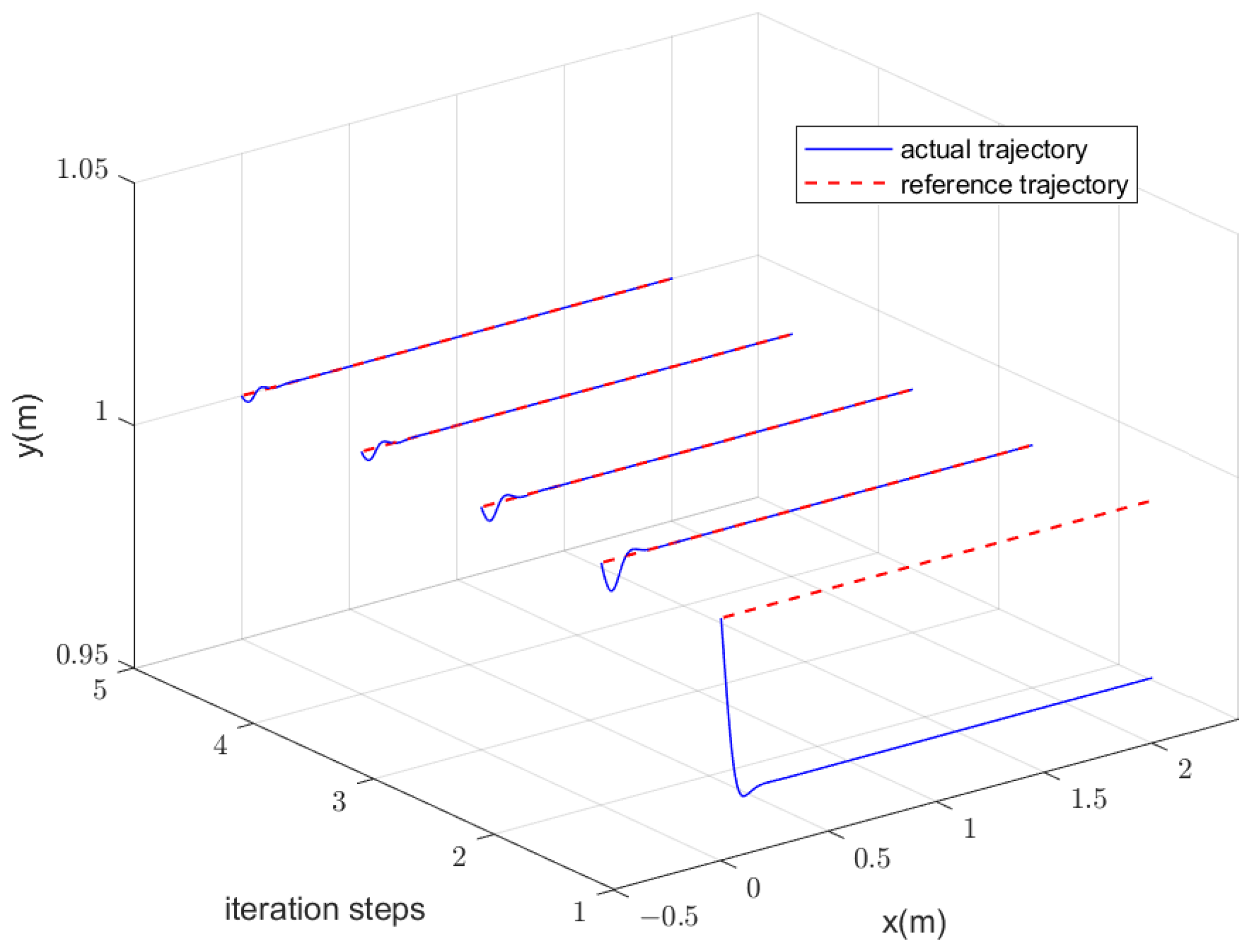
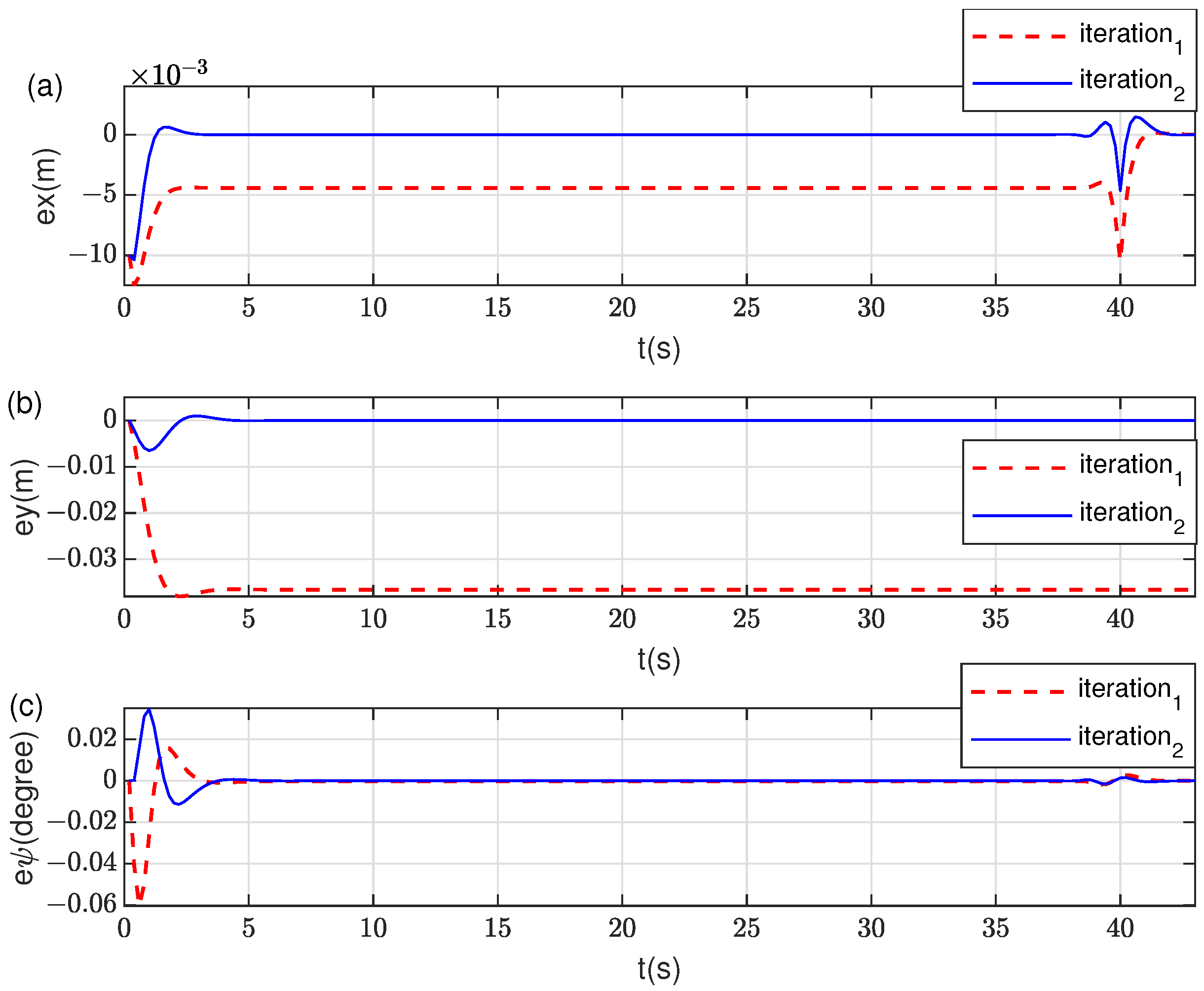
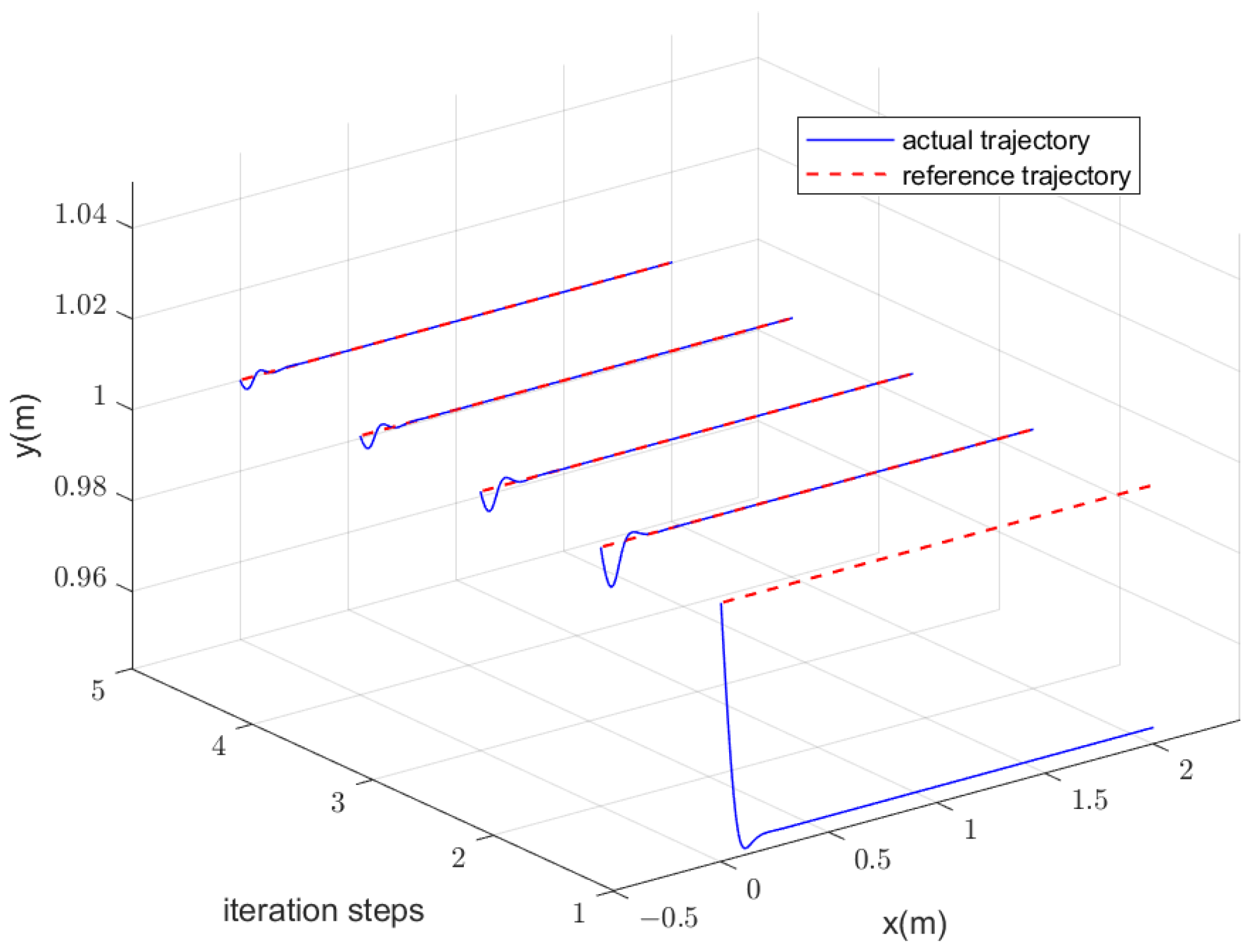
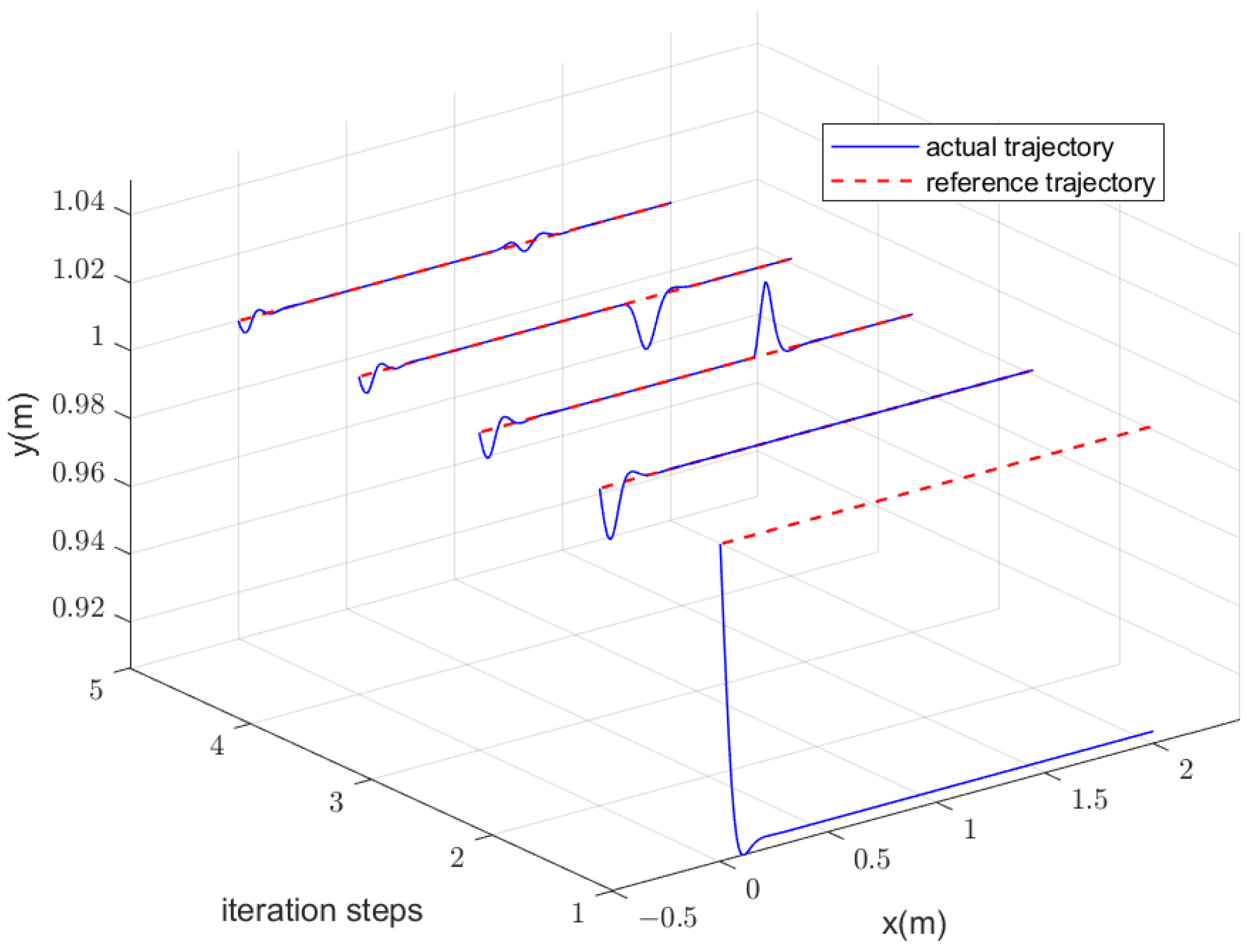
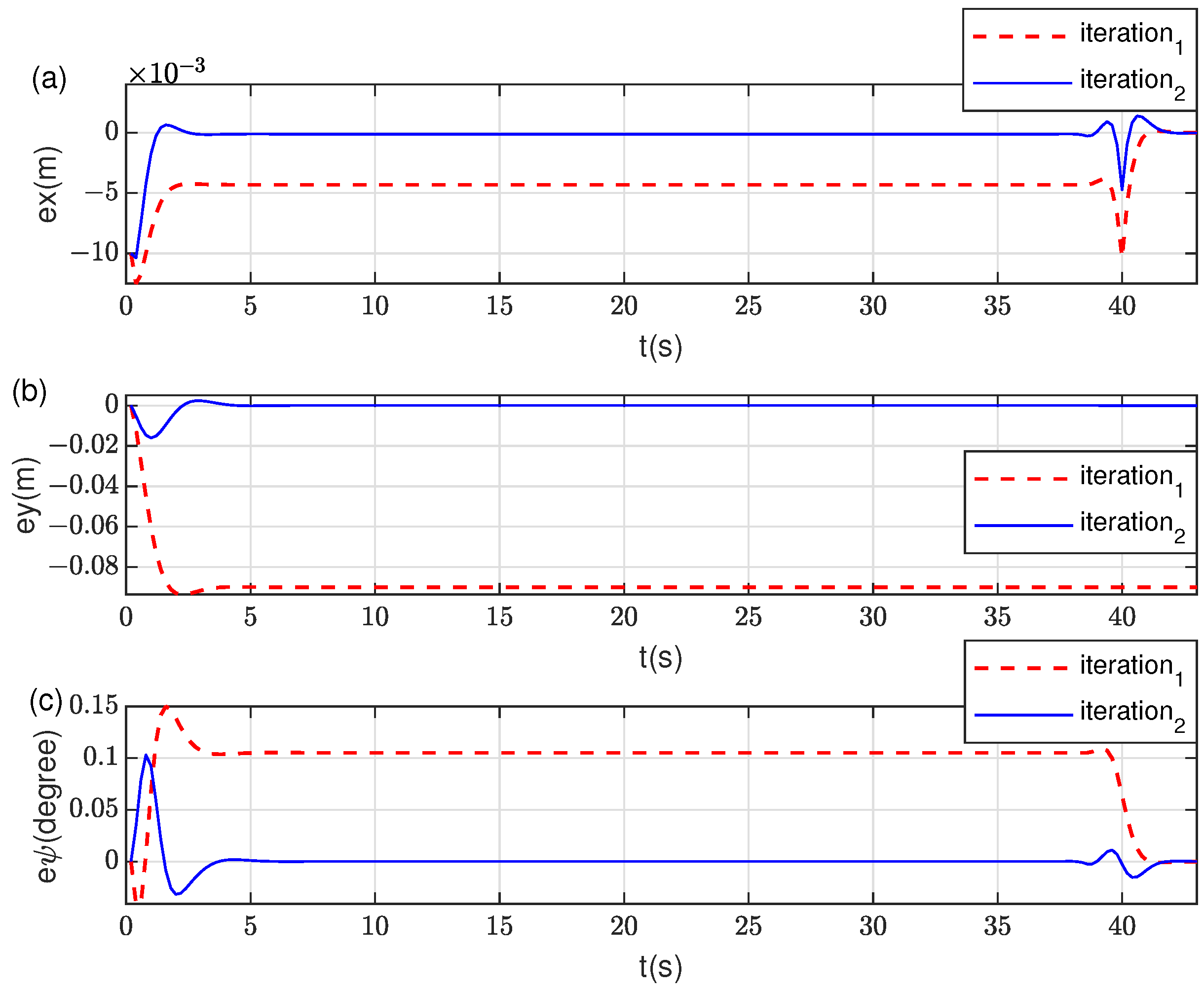
5.2. Iterative Docking Simulation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Du, Z.; Wen, Y.; Xiao, C.; Huang, L.; Zhou, C.; Zhang, F. Trajectory-cell based method for the unmanned surface vehicle motion planning. Appl. Ocean Res. 2019, 86, 207–221. [Google Scholar] [CrossRef]
- Wang, W.; Gheneti, B.; Mateos, L.A.; Duarte, F.; Ratti, C.; Rus, D. Roboat: An autonomous surface vehicle for urban waterways. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), The Venetian Macao, Macau, China, 3–8 November 2019; pp. 6340–6347. [Google Scholar]
- Liu, H.; Lin, Z.; Cao, M.; Wang, X.; Lü, J. Coordinate-free formation control of multi-agent systems using rooted graphs. Syst. Control Lett. 2018, 119, 8–15. [Google Scholar] [CrossRef]
- Verginis, C.K.; Nikou, A.; Dimarogonas, D.V. Robust formation control in SE (3) for tree-graph structures with prescribed transient and steady state performance. Automatica 2019, 103, 538–548. [Google Scholar] [CrossRef] [Green Version]
- Ebel, H.; Eberhard, P. A comparative look at two formation control approaches based on optimization and algebraic graph theory. Robot. Auton. Syst. 2021, 136, 103686. [Google Scholar] [CrossRef]
- Ran, D.; Chen, X.; Misra, A.K. Finite time coordinated formation control for spacecraft formation flying under directed communication topology. Acta Astronaut. 2017, 136, 125–136. [Google Scholar] [CrossRef]
- Guo, F.; Zhang, T.; Zhang, F.; Gao, L.; Wang, Z.; Zhang, S. Event-triggered coordinated attitude control for satellite formation under switching topology. Adv. Control Appl. Eng. Ind. Syst. 2020, 2, 1–13. [Google Scholar] [CrossRef]
- Xu, Y.; Luo, D.; Zhou, L.; Shao, J.; You, Y. A gain matrix approach for robust distributed 3D formation control with second order swarm systems. Sci. Sin. Technol. 2020, 50, 461–474. [Google Scholar]
- Sarlette, A.; Sepulchre, R. A PDE viewpoint on basic properties of coordination algorithms with symmetries. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; pp. 5139–5144. [Google Scholar]
- Qi, J.; Pan, F.; Qi, J. A PDE approach to formation tracking control for multi-agent systems. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 7136–7141. [Google Scholar]
- Chen, H.; Qi, J.; Dong, Y.; Zhong, S. Multi-Robot Formation Control And Implementation. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 879–884. [Google Scholar]
- Meurer, T.; Krstic, M. Nonlinear PDE–based motion planning for the formation control of mobile agents. IFAC Proc. Vol. 2010, 43, 599–604. [Google Scholar] [CrossRef]
- Freudenthaler, G.; Meurer, T. PDE-based multi-agent formation control using flatness and backstepping: Analysis, design and robot experiments. Automatica 2020, 115, 108897. [Google Scholar] [CrossRef] [Green Version]
- Breivik, M.; Loberg, J.E. A virtual target-based underway docking procedure for unmanned surface vehicles. IFAC Proc. Vol. 2011, 44, 13630–13635. [Google Scholar] [CrossRef] [Green Version]
- Yu, W.; Wang, J.; Tang, G.; Li, M.; Qiao, Y. Dual-attention-based optical terminal guidance for the recovery of unmanned surface vehicles. Ocean Eng. 2021, 239, 109852. [Google Scholar] [CrossRef]
- Xie, T.; Li, Y.; Jiang, Y.; Pang, S.; Wu, H. Turning circle based trajectory planning method of an underactuated AUV for the mobile docking mission. Ocean Eng. 2021, 236, 109546. [Google Scholar] [CrossRef]
- Liao, Y.; Jia, Z.; Zhang, W.; Jia, Q.; Li, Y. Layered berthing method and experiment of unmanned surface vehicle based on multiple constraints analysis. Appl. Ocean Res. 2019, 86, 47–60. [Google Scholar] [CrossRef]
- Martinsen, A.B.; Lekkas, A.M.; Gros, S. Autonomous docking using direct optimal control. IFAC-PapersOnLine 2019, 52, 97–102. [Google Scholar] [CrossRef]
- Jiang, T.; Yang, Y.; Chen, H.; Wang, X.; Zhang, D. Way-point tracking control of underactuated USV based on GPC path planning. In Proceedings of the International Conference on Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 393–406. [Google Scholar]
- Dong, Z.; Wan, L.; Li, Y.; Liu, T.; Zhang, G. Trajectory tracking control of underactuated USV based on modified backstepping approach. Int. J. Nav. Archit. Ocean Eng. 2015, 7, 817–832. [Google Scholar] [CrossRef] [Green Version]
- Su, Y.; Wan, L.; Zhang, D.; Huang, F. An improved adaptive integral line-of-sight guidance law for unmanned surface vehicles with uncertainties. Appl. Ocean Res. 2021, 108, 102488. [Google Scholar] [CrossRef]
- Kinjo, L.M.; Wirtensohn, S.; Reuter, J.; Menard, T.; Gehan, O. Trajectory tracking of a fully-actuated surface vessel using nonlinear model predictive control. IFAC-PapersOnLine 2021, 54, 51–56. [Google Scholar] [CrossRef]
- Abdelaal, M.; Fränzle, M.; Hahn, A. Nonlinear Model Predictive Control for trajectory tracking and collision avoidance of underactuated vessels with disturbances. Ocean Eng. 2018, 160, 168–180. [Google Scholar] [CrossRef]
- Haseltalab, A.; Garofano, V.; van Pampus, M.; Negenborn, R.R. Model Predictive Trajectory Tracking Control and Thrust Allocation for Autonomous Vessels. IFAC-PapersOnLine 2020, 53, 14532–14538. [Google Scholar] [CrossRef]
- Zheng, H.; Negenborn, R.R.; Lodewijks, G. Trajectory tracking of autonomous vessels using model predictive control. IFAC Proc. Vol. 2014, 47, 8812–8818. [Google Scholar] [CrossRef] [Green Version]
- Abdelaal, M.; Fränzle, M.; Hahn, A. NMPC-based trajectory tracking and collison avoidance of underactuated vessels with elliptical ship domain. IFAC-PapersOnLine 2016, 49, 22–27. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Q.; Zhang, J.; Xie, Y. Iterative learning-based path and speed profile optimization for an unmanned surface vehicle. Sensors 2020, 20, 439. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, C.; Wei, X.; Liu, L.; Zhang, L.; Liu, S. Iterative Learning Based Output Feedback Path Following Control for Marine Surface Vessels. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 727–732. [Google Scholar]
- Liu, L.; Wang, D.; Peng, Z. Cooperative dynamic positioning of multiple offshore vessels with persistent ocean disturbances via iterative learning. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 8699–8704. [Google Scholar]
- Wang, W.; Mateos, L.A.; Park, S.; Leoni, P.; Gheneti, B.; Duarte, F.; Ratti, C.; Rus, D. Design, modeling, and nonlinear model predictive tracking control of a novel autonomous surface vehicle. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6189–6196. [Google Scholar]
- Wang, W.; Shan, T.; Leoni, P.; Fernández-Gutiérrez, D.; Meyers, D.; Ratti, C.; Rus, D. Roboat II: A Novel Autonomous Surface Vessel for Urban Environments. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 1740–1747. [Google Scholar]
- Mehrez, M.W.; Mann, G.K.; Gosine, R.G. An optimization based approach for relative localization and relative tracking control in multi-robot systems. J. Intell. Robot. Syst. 2017, 85, 385–408. [Google Scholar] [CrossRef]
- Andersson, J.A.; Gillis, J.; Horn, G.; Rawlings, J.B.; Diehl, M. CasADi: A software framework for nonlinear optimization and optimal control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
- Morrison, D.D.; Riley, J.D.; Zancanaro, J.F. Multiple shooting method for two-point boundary value problems. Commun. ACM 1962, 5, 613–614. [Google Scholar] [CrossRef]
- Bock, H.G.; Plitt, K.J. A multiple shooting algorithm for direct solution of optimal control problems. IFAC Proc. Vol. 1984, 17, 1603–1608. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Wu, N.; Yuan, H.; Pan, F.; Shan, Z.; Wu, C. PDE Formation and Iterative Docking Control of USVs for the Straight-Line-Shaped Mission. J. Mar. Sci. Eng. 2022, 10, 478. https://doi.org/10.3390/jmse10040478
Zhou Y, Wu N, Yuan H, Pan F, Shan Z, Wu C. PDE Formation and Iterative Docking Control of USVs for the Straight-Line-Shaped Mission. Journal of Marine Science and Engineering. 2022; 10(4):478. https://doi.org/10.3390/jmse10040478
Chicago/Turabian StyleZhou, Yusi, Nailong Wu, Haodong Yuan, Feng Pan, Zhiyong Shan, and Chao Wu. 2022. "PDE Formation and Iterative Docking Control of USVs for the Straight-Line-Shaped Mission" Journal of Marine Science and Engineering 10, no. 4: 478. https://doi.org/10.3390/jmse10040478
APA StyleZhou, Y., Wu, N., Yuan, H., Pan, F., Shan, Z., & Wu, C. (2022). PDE Formation and Iterative Docking Control of USVs for the Straight-Line-Shaped Mission. Journal of Marine Science and Engineering, 10(4), 478. https://doi.org/10.3390/jmse10040478