1. Introduction
Recently, the demand for advanced marine mechatronics systems has been increasing with the current situation where the region of human production activities is expanding to the deep ocean and polar regions. The dynamic positioning (DP) system is the representative marine mechatronics system. This system adjusts the positions and forces of a number of propulsion systems installed in the hulls and operates along a set route during vessel navigation. Vessels equipped with DP systems are operated in the offshore oil and gas industry because they have economic advantages when compared with traditional methods for maintaining the location of floating structures such as mooring systems or jacket structures. Specifically, DP systems have been applied in marine drilling, dredging, lifting, pipelaying, subsea installation and maintenance, and for transportation of workers between marine structures. These systems have become a major part of the marine industry [
1,
2,
3,
4].
The optimal performance of the control system is essential for the effective operation of DP systems used for various purposes in the ocean. When the DP system was first developed in the early 1960s, a single-input single-output (SISO) proportional-integral-differential (PID) controller with a low-pass filter [
5] was applied to independently control the surge, sway, and yaw motions of vessels. Balchen et al. [
6] and Grimble et al. [
7] applied multi-variable optimal control and Kalman filter to DP systems, which enabled reliability and stability of such systems to be used in a wide range of areas. Based on the nonlinear control theory, Lee et al. [
8], Fossen et al. [
1] and Kim et al. [
9] developed weathervaning control to automatically set the heading angle to the direction of the wave loads acting on the ship to reduce fuel consumption and CO
2 emissions. Kim et al. [
10] demonstrated the possibility of using weathervaning control applied to the process of loading and offloading for floating production storage and offloading (FPSO) with tandem arrangement and shuttle tanker. Sørensen [
11] introduced DP control techniques for the application of marine mechatronics systems. Yu et al. [
12] applied the
control technique to DP control and compared its performance with linear-quadratic-Gaussian control (LQG) through numerical simulations. Lee et al. [
13] applied the theory of linear quadratic regulator (LQR) and LQR with an error integrator (LQI). Kim et al. [
14] also developed a PID controller that included an anti-windup controller that restrained the propensity of divergence of the integral controller in the DP system of a shuttle tanker. Jeon et al. [
15] studied the gain scheduling of the PID controller using a fuzzy system. Aleksander et al. [
16] presented a dynamic positioning scheme based on a model-predictive control algorithm that combines positioning control and thrust allocation to theoretically yield a near-optimal controller output. Borkowski [
17] suggested designing an expert system that includes a function to automatically stabilize ship’s course with the inference engine. Additionally, Peng et al. [
18] introduced a cooperative control scheme for the dynamic positioning of multiple offshore vessels based on a dynamic surface control technique with the input-to-state stability of a closed-loop network system.
Robust DP control techniques applicable to a variety of vessels and work scenarios are essential because of the recent demands in marine operations with respect to increasing types and frequencies. DP systems are based on conventional controllers; proportional derivative (PD) controller is a widely used linear controller. Conventional PD controllers typically use gain scheduling based on each characteristic of marine operation scenarios and ocean environmental changes to ensure DP performance. However, there are some problems related to the application of a linear PD controller to the DP system. Gain scheduling should be adjusted for each vessel model and ocean environment while operating the DP system. If the gain values are not appropriate in a specific vessel model and ocean environment, the conventional PD controller sometimes results in control difficulty with unsatisfactory performance in nonlinear plant controls, especially in FPSO vessels with turret mooring systems.
A sliding mode (SM) controller was applied to the DP system to overcome the limitation of the conventional linear controller. The SM controller approach enables the realization of control performance and stability requirements for the desired position. Because the SM controller uses vessel model information, an estimated mass is used as a parameter. Furthermore, the same performance is ensured for different loading conditions without requiring a gain-scheduling approach, and the SM controller can be easily adjusted with simple equations. Therefore, the SM controller can be applied in a wide range of environmental conditions without performance degradation. Tannuri et al. [
19,
20] applied an SM controller to the application of the motion control of the turret-moored offshore platform along the direction of the horizontal plane, such as surge, sway, and yaw. Kim et al. [
21] also applied an SM controller to the depth adjustment and maneuverability control of an unmanned submarine and demonstrated its effectiveness using simulation. Liang et al. [
22] presented a finite-time observer-based adaptive sliding mode output feedback control for the DP of ships considering input saturation, unmeasured states, and unknown environment disturbances. Zhao et al. [
23] proposed a robust adaptive terminal sliding mode controller for the DP of a semi-submersible offshore platform using a state feedback controller and a robust adaptive terminal sliding mode compensator. Chen et al. [
24] developed a novel iterative sliding mode-based output feedback controller for the DP of a ship subjected to ocean environmental disturbance with finite-time state observer. Agostinho et al. [
25] proposed the application of a controller with sliding mode control technique to the DP of a floating vessel using numerical simulations and experimental validations.
In this study, a DP system based on the SM controller was developed for the application of FPSO carrying out turret connection work in the sea. The FPSO is equipped with six azimuth thrusters and a turret placed at the bow position of the vessel to carry out access work. A kinematic model is constructed that transforms the center of motion of the vessels because the motion of the vessel should be controlled around the turret installation point located in the bow position. The SM controller, a nonlinear control technique, is used to control the DP system to ensure control performance by selecting control parameters intuitively considering the response characteristics of vessels. In addition, a MATLAB/Simulink-based simulator, which can quantitatively simulate the motion of vessels, was used to evaluate the validity of the proposed control algorithms. The SM controller was designed by applying the Lyapunov stability theory to ensure the robustness of the controller. The effectiveness of the designed SM controllers was evaluated using time-domain simulations and compared with the results of a typical proportional-derivative (PD) controller.
Section 2 describes the configuration of simulators for the performance evaluation of the DP system and the theory of vessel motion utilized therein.
Section 3 presents the design of the SM controllers that enables DP control around specific vessel locations.
Section 4 presents the results of the DP control simulation in marine environment conditions and
Section 5 summarizes the study and presents the conclusions.
2. Methodologies for the DP Control Application
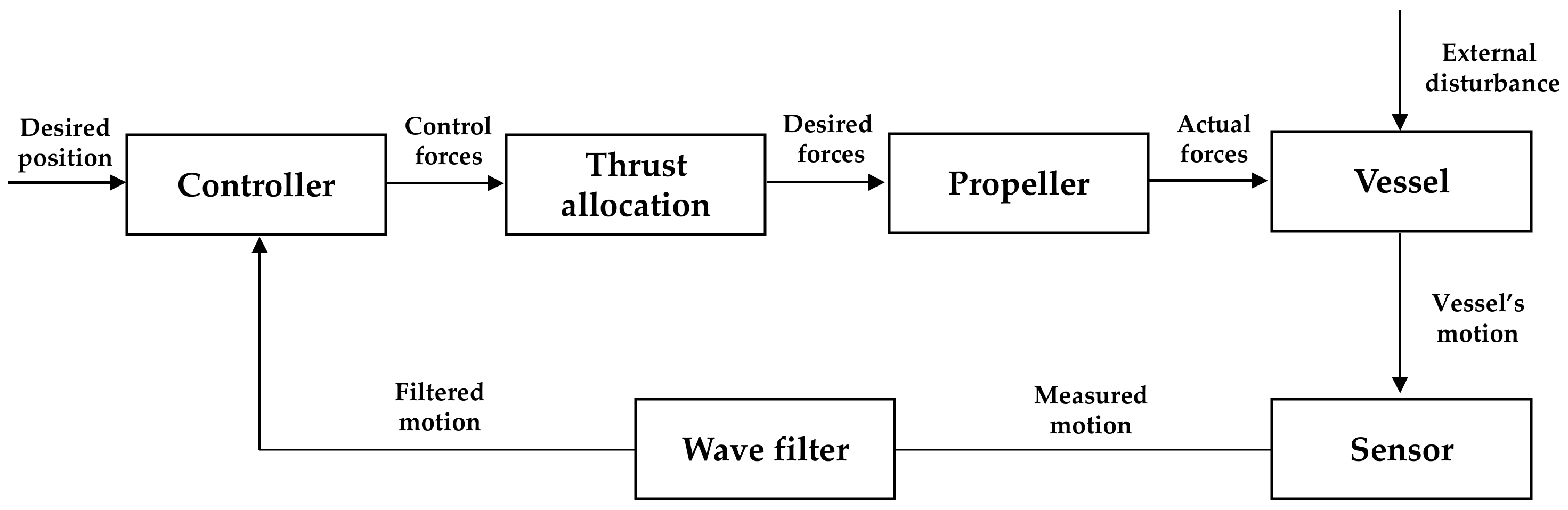
This section describes the methodologies for the DP system. The DP system consists of sensors, controllers and filtering algorithms, and propellers. The sensors are used to measure the positions and angles of the vessel, while the control and thrust allocation algorithms compute the desired forces to be delivered by each propeller to counteract environmental loads such as wind, waves, and current.
Figure 1 shows a block diagram of a DP system illustrating the connections between the controller, thruster allocation algorithm, propeller, vessel, sensors and wave filter. A wave filter suppresses the high-frequency motion from the measurements, and a thrust allocation algorithm distributes the desired forces to the propellers equipped in the vessel. To evaluate the motion and control response of vessels equipped with DP systems, a vessel operation simulator with three degrees of freedom (DOF) motions including surge, sway, and yaw was developed based on MATLAB/Simulink.
This section describes a mathematical model that calculates the motion response of a marine surface vessel, considering the effects of sea loads such as from waves, currents, and wind loads. Vessels operating in the sea engage in six DOF motions, which include translational motions such as surge, sway, heave, and rotational motions including roll, pitch, and yaw. Specifically, the DP system in this study considers three DOF horizontal plain models, namely surge, sway, and yaw.
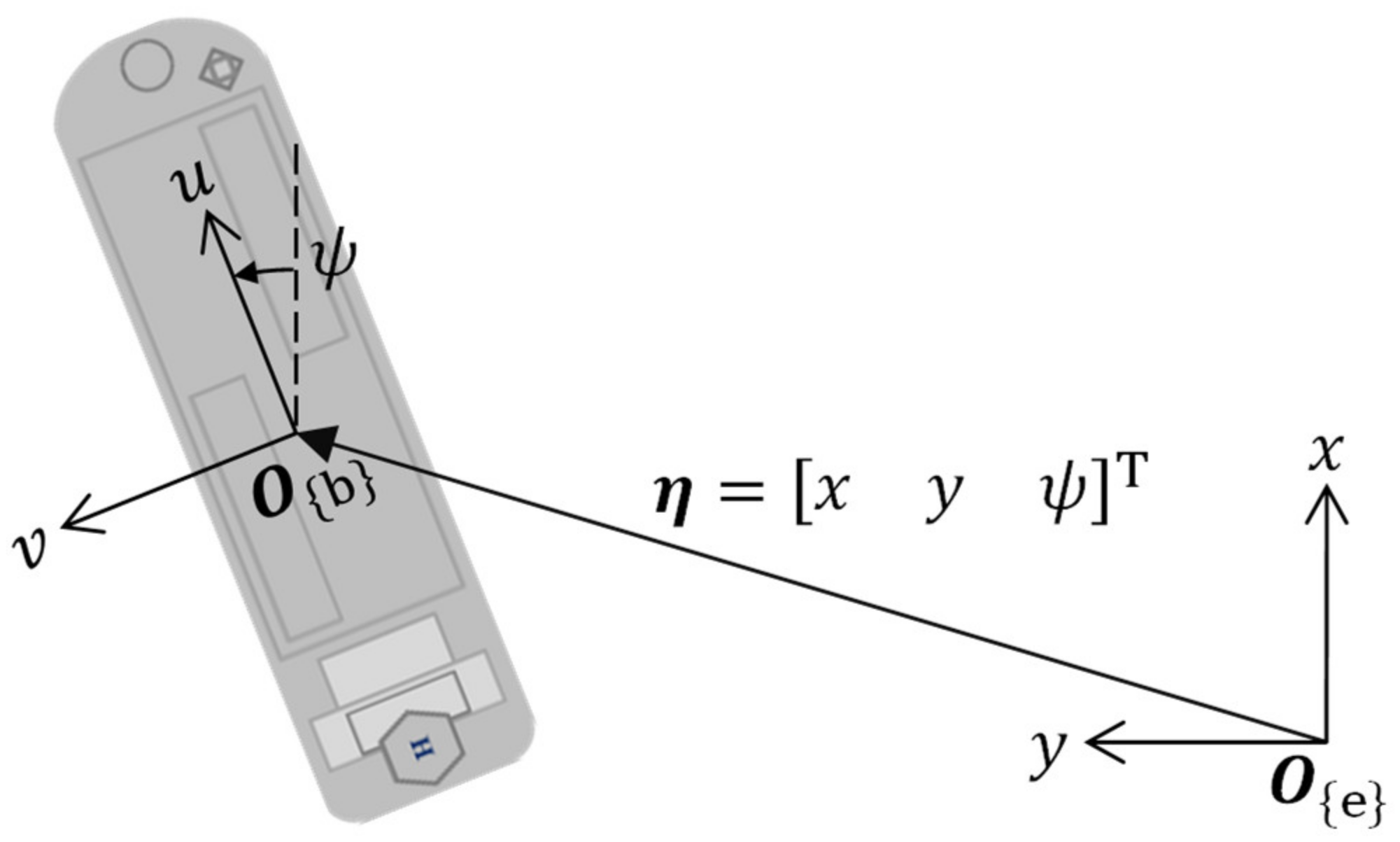
Equation (1) describes the surface vessel motion with a state variable vector representing the position (
x,
y) and angle (
ψ) of the vessel, as defined in the global reference frame {
e} shown in
Figure 2. The vessel motion consists of a low-frequency motion
, which is caused by the effects of wave drift force, current force, wind force, etc., and a high-frequency motion
, which is caused by the wave exiting force as follows:
Equations (2) and (3) describe the 3 DOF equations of the motion of the vessel and represent the kinematic transformation between the global reference frame and the body-fixed coordinate system for numerical simulations as follows:
where
ν is the velocity vector of the vessel defined in the fixed coordinate system such as the velocity of the surge, sway, and yaw directions.
is the Euler angle transformation matrix that converts the velocity of the body coordinate system into the velocity of the global reference coordinate system.
In Equation (3),
is the rigid body mass matrix, and
is the added mass of the fluid around the hull at a low frequency of the vessel.
and
are the matrices that express the Coriolis and centripetal forces, respectively, expressing the effect of the hull mass and added mass. Furthermore,
is the relative velocity defined by
, and
is the current velocity.
is a linear damping coefficient matrix at low frequencies, characterized by
.
is a nonlinear damping force vector that includes the current force and cross-flow damping force.
and
are the wave and wind loads, respectively, at low frequency; they are external forces of the marine environment.
τ is the control force generated through the operation of the controller and the propeller. All parameters of matrices are described in
Appendix A.
The vessel exposed above the waterline is subjected to sea wind loads according to its shape, as expressed in Equation (4) below,
where
is the air density and
is the sea wind speed.
and
are the projection areas along the surge and sway directions of the vessel, respectively.
,
, and
represent the wind force coefficients in the surge, sway, and yaw directions, respectively.
is the incident angle of sea wind.
The wave drift force acting on the vessel is described by the quadratic transfer function (QTF) in Equation (5).
and
refer to the amplitude of the j
th and k
th wave frequencies in the components of the N wave frequencies, which are calculated when generating the irregular wave from the given wave spectrum. The nonlinear transfer function is a function of complex numbers representing the wave drift force calculated through a numerical analysis program using the high-order boundary element method.
and
represent the real and imaginary parts of the quadratic transfer function, respectively [
26].
and
are the j
th and k
th wave frequencies, respectively.
and
are the differences of wave frequencies and phases defined by
and
, respectivley. Finally,
denotes the time when the ocean waves are generated.
The high-frequency (or wave frequency) motion can be expressed by the response amplitude operator (RAO) as shown in Equation (6):
where RAO is also expressed as a harmonic function representing the real and imaginary parts of the RAO.
The noise generated using the sensor modules in the simulators for evaluating DP control responses, as shown in
Figure 1, using the primary Gauss-Markov process is given as follows:
where
is the measured physical value,
is the Gaussian white noise, and
is the inverse of the time constant that produces a long-term error in the physical measurement sensor. Fossen [
27] describes the configuration of the dynamical term.
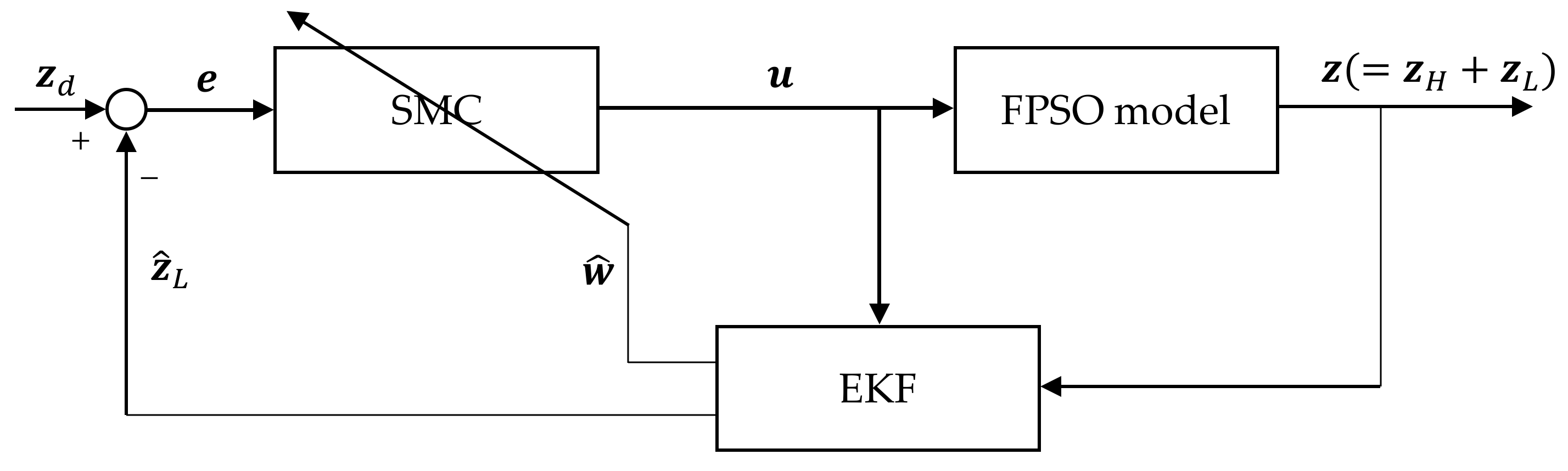
An extended Kalman filter (EKF) is applied to the simulator to separate the low-frequency motion of the vessel model, including the low-frequency motion of the ves-sel, wave frequency, and sensor noise. The estimation algorithm for uncertain external forces was designed in this study by adapting the EKF with a disturbance model of the uncertain external force induced by wave, current, and wind. The EKF is a nonlinear ad-aptation of the Kalman filter, which observes a dynamic system in which zero-mean, Gaussian white noise is assumed in both the dynamics and measurement. The model as a continuous form that is observed by the extended Kalman filter is described by
where
is the state vector of the system described by
.
is the wave perturbation vector,
is the wave frequency vector,
is vessel’s motion vector,
is the vessel’s velocity vector, and
is the uncertain external force vector induced by ocean environmental loads.
is the input vector described by
=
, and
is the measurement vector measured by motions of the vessel described by
=
.
is the nonlinear state dynamics,
is the nonlinear output function,
is a vector that describes the noise of each state, and
and
are the process and measurement noises, respectively, described by zero-mean Gaussian white noise. The Equation (8) can be transformed into Equation (9) as discretized form with Euler discretization as follows:
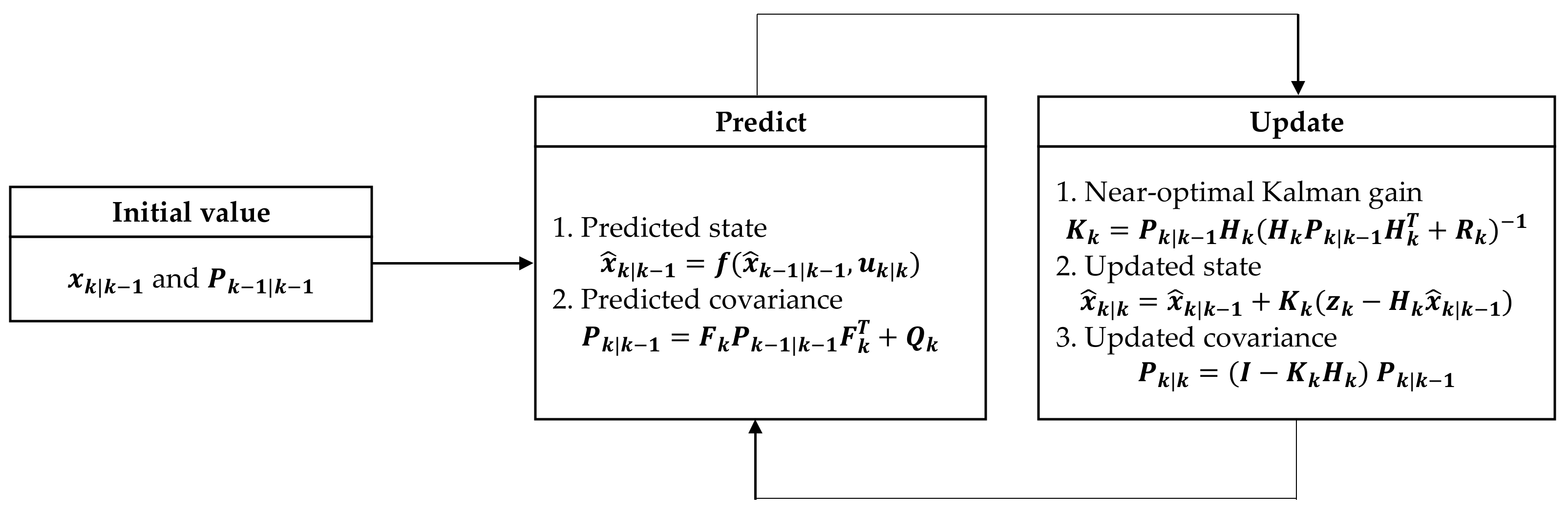
The EKF iterates through the prediction and update steps for each discrete time to estimate the states of the system as shown in
Figure 3. The prediction step calculates a predicted state and covariance. The update step calculates the Kalman gain to adjust the covariance of each state and the estimated value based on the difference between the estimated and measured states. Finally, the covariance and state estimates of the next time step can be updated utilizing a Jacobian to linearize the conditions. In this procedure, the algorithm calculates the estimated state vector
described by
. The EKF calculates estimated external disturbance
induced by the ocean environment, and it can be applied to the SM controller to compensate the ocean environmental loads. Additionally,
and
are the variance matrices of the process and measurement noises, respectively.
The propulsion system is modeled using a linear differential equation, and the maximum speed rate of each propeller characteristic is limited. In addition, the thrust distribution algorithm that distributes the control forces calculated from the controller to six azimuth propulsion systems is applied based on the Lagrange multiplier theory. Fossen [
27] described the details of the extended Kalman filter, propulsion system, and thrust distribution algorithm.
3. Design of a Sliding Mode Controller
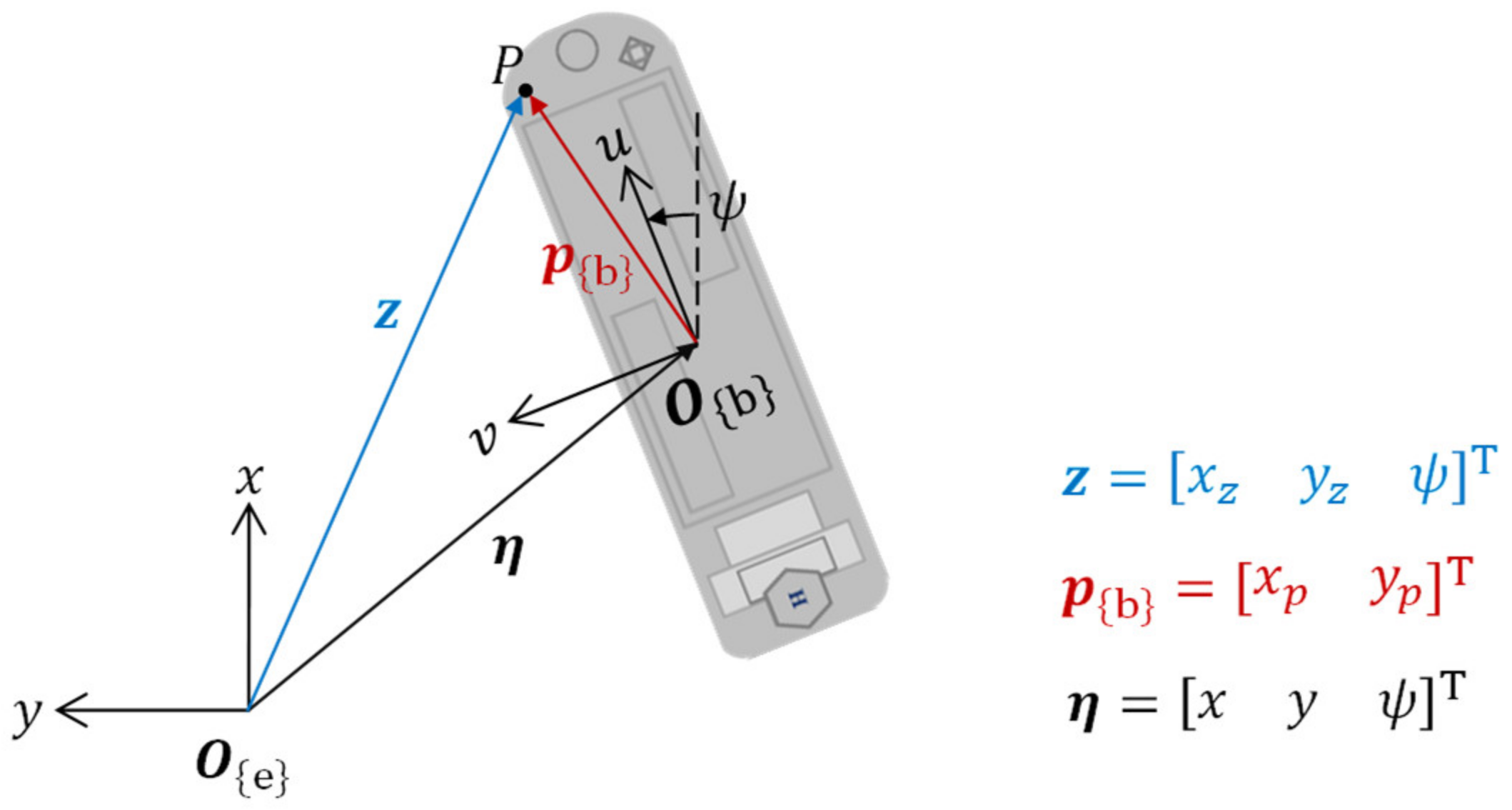
This section describes the design of the sliding mode controller for the dynamic motion control of a vessel model performing turret access operations in the sea. As shown in
Figure 4, it is assumed that the turret (
) used to carry out the access work was located at the bow position of the vessel model. Equation (10) describes the kinematic equations for converting the motion of the vessel to ensure that the control algorithm places a specific point
z on the target point
. Equation (11) describes the kinematic transformation matrix
according to the position of the turret
as defined in the body-fixed coordinate system {
b}. Additionally, Equation (12) describes the dynamic equation of the motion of the vessel with unknown external forces for the design of the SM controllers. Here are the Equations (10)–(12) as follows:
where
is the mass of a vessel including the low-frequency added mass described by
,
is the control vector, and
is the uncertainty variable vector including the dynamic model and environmental external force.
is the transformation matrix that converts the body-fixed coordinate to the global reference coordinate system.
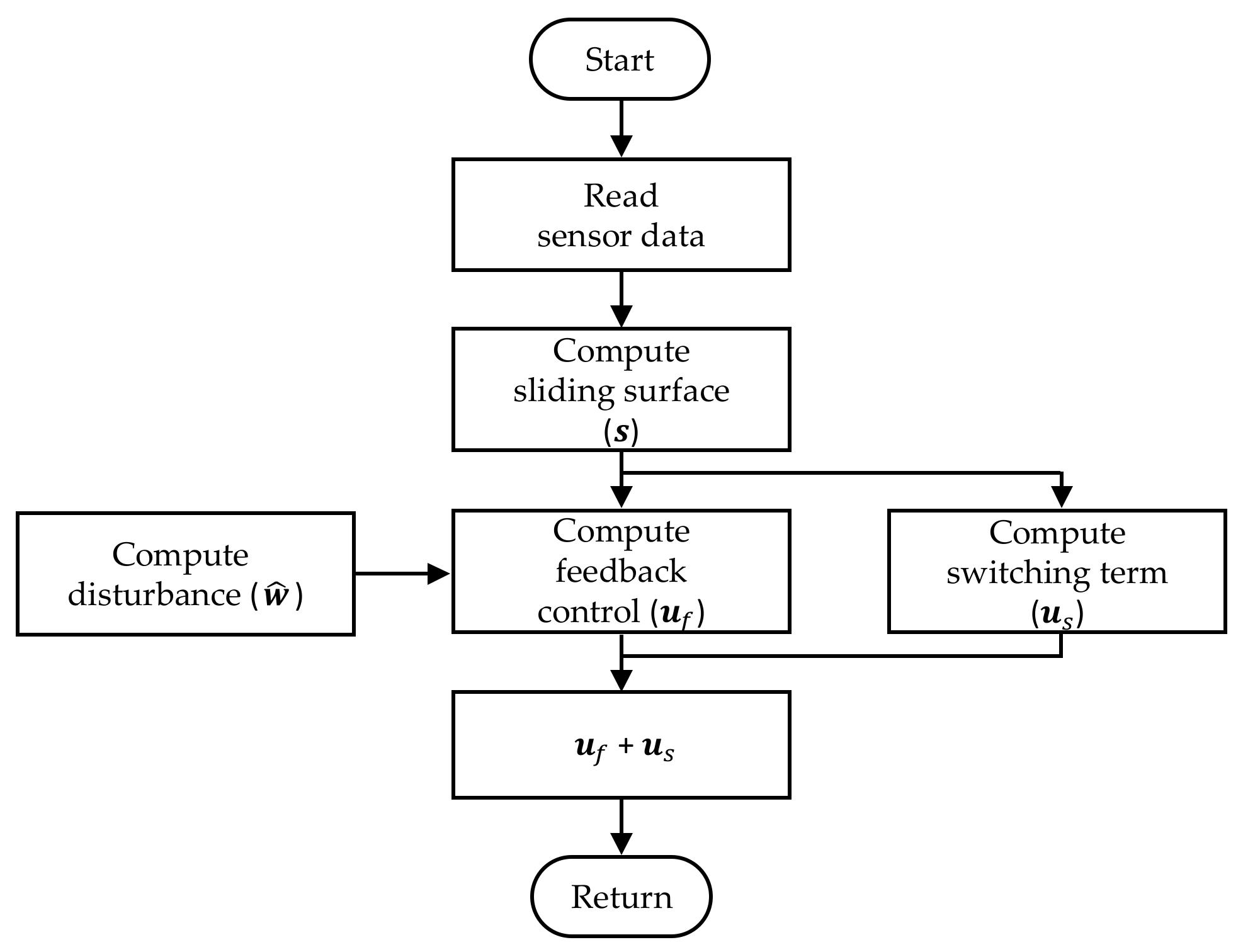
Figure 5 describes the overall procedure of sliding model control. The control objective in this study was to set the turret position at a specific point and to ensure that the velocity of the vessel is zero; this can be expressed by Equation (13) as
To achieve this control objective, the system error
e can be defined using Equation (14) and the sliding surface for SM control can be defined using Equation (15)
where
Iλ is the gain for feedback control when the system state is on a sliding plane, and all elements of
Iλ should have positive values. Therefore, the system error
e automatically converges to zero when the
s = 0 condition is satisfied.
For the design of the robust controller, the Lyapunov function of the control system with the sliding plane variable can be used as shown in Equations (16) and (17), which describes the derivative of the Lyapunov function to determine the stability of the control system.
The input
of the SM controller consists of the feedback controller
and the switching controller
. Equation (18) describes the feedback controller
and Equation (19) describes the relation between the derivative of the Lyapunov function and
. Equation (20) describes the switching controller
. Here are the Equations (18)–(21), as follows:
where
is the estimated uncertainty of the external force,
controls the time when the system reaches the sliding plane, and
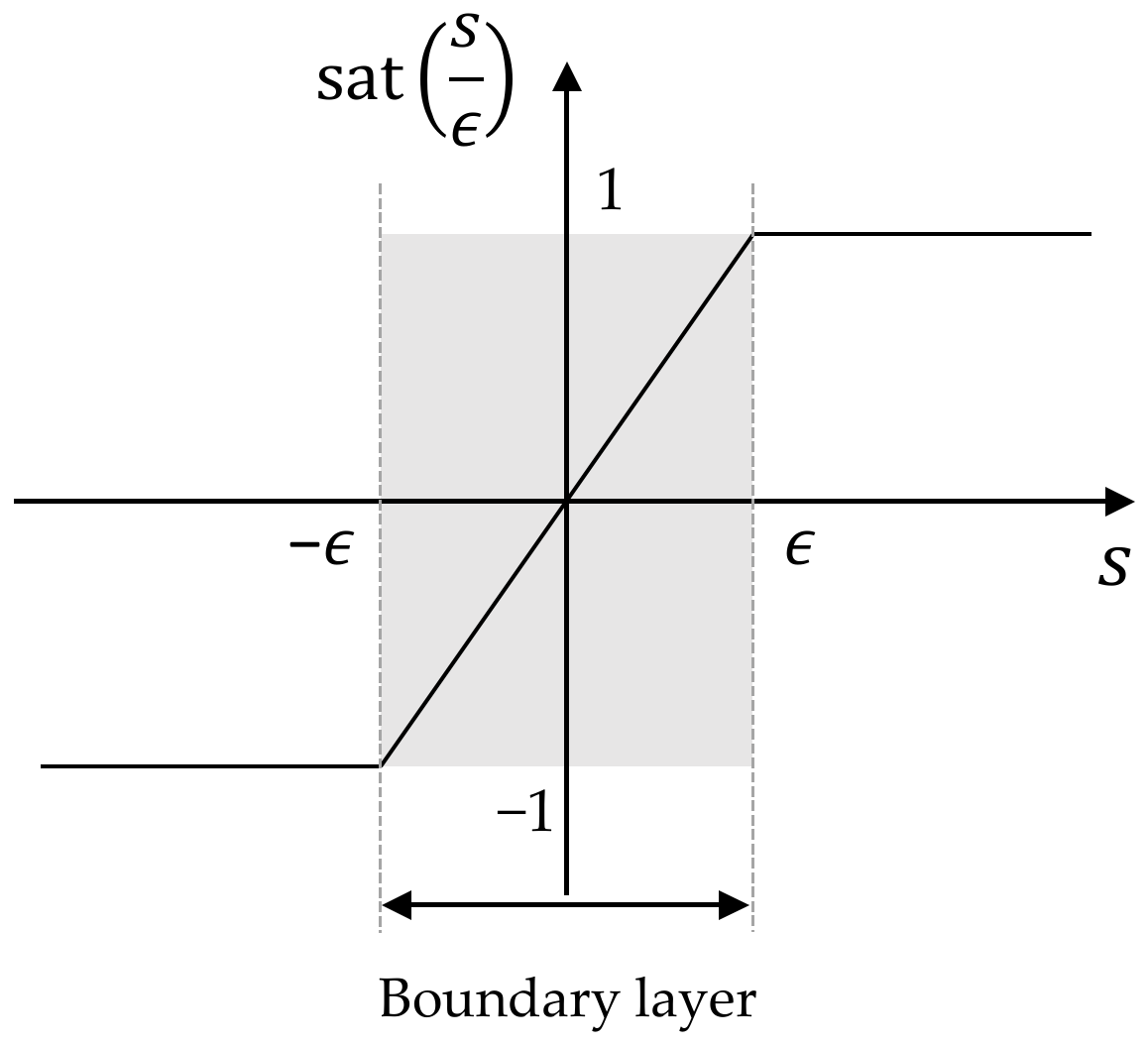
is a boundary layer that controls the tolerance in the sliding plane, which is the main issue of the sliding mode controller. ⊙ is the vector multiplication operator. In practical applications of sliding mode controllers, the undesirable phenomenon of oscillations called “chattering” having finite frequency and amplitude may occur in the control inputs. Chattering leads to low control accuracy, high wear rate of mechanical systems, and high heat in electrical systems. To reduce the chattering phenomenon, the boundary layer
, as shown in
Figure 6, is set as smoothing forms of control inputs.
As the system satisfies the condition
from Equation (21), the system is globally uniformly asymptotically stable according to the LaSalle and Yoshizawa theorem [
27,
28,
29]. Khalil [
30,
31] described the details of the sliding mode controller.
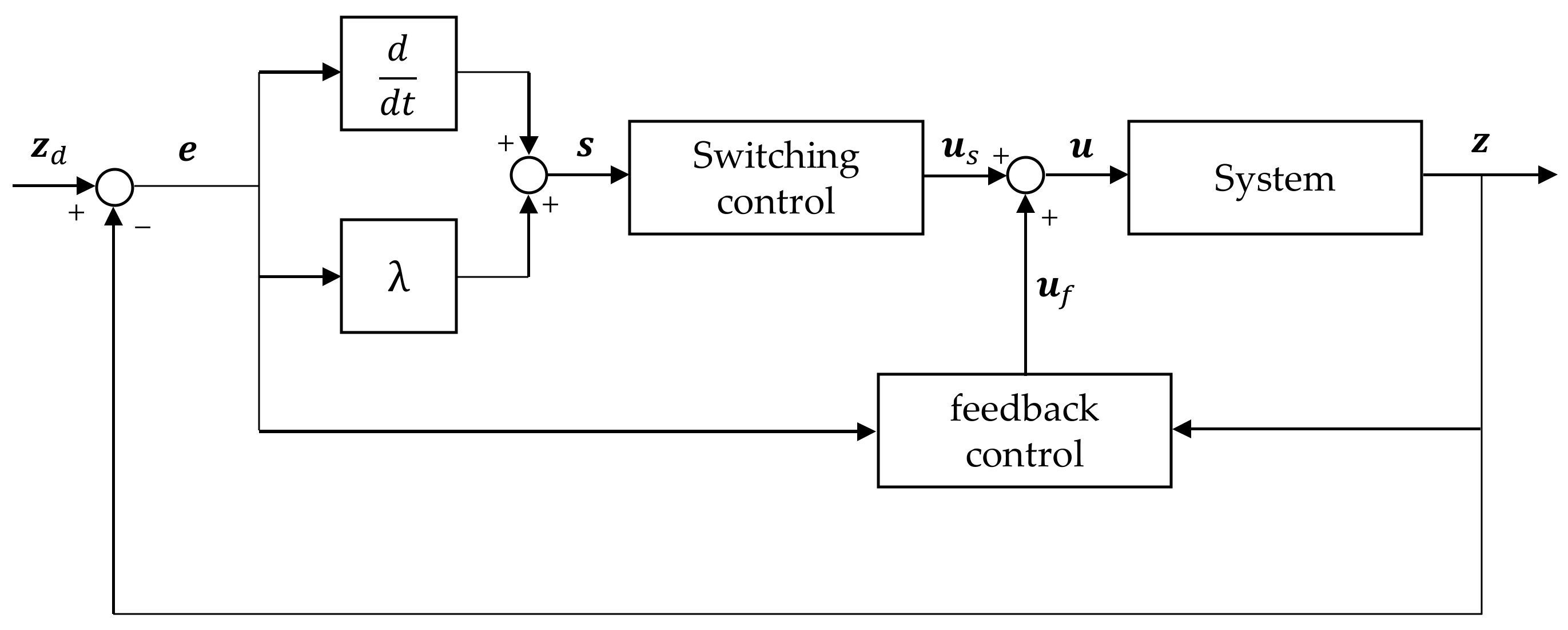
Figure 7 shows the block diagram of the sliding mode controller, illustrating its overall process.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}