
Operational Modeling of North Aegean Oil Spills Forced by Real-Time Met-Ocean Forecasts





Abstract
:
1. Introduction
2. Materials and Methods
2.1. Oil Spill Model Description
2.2. Simulated Physical Processes
2.2.1. Horizontal Transport
2.2.2. Vertical Transport
Wave Entrainment
Oil Resurfacing
Vertical Turbulent Mixing
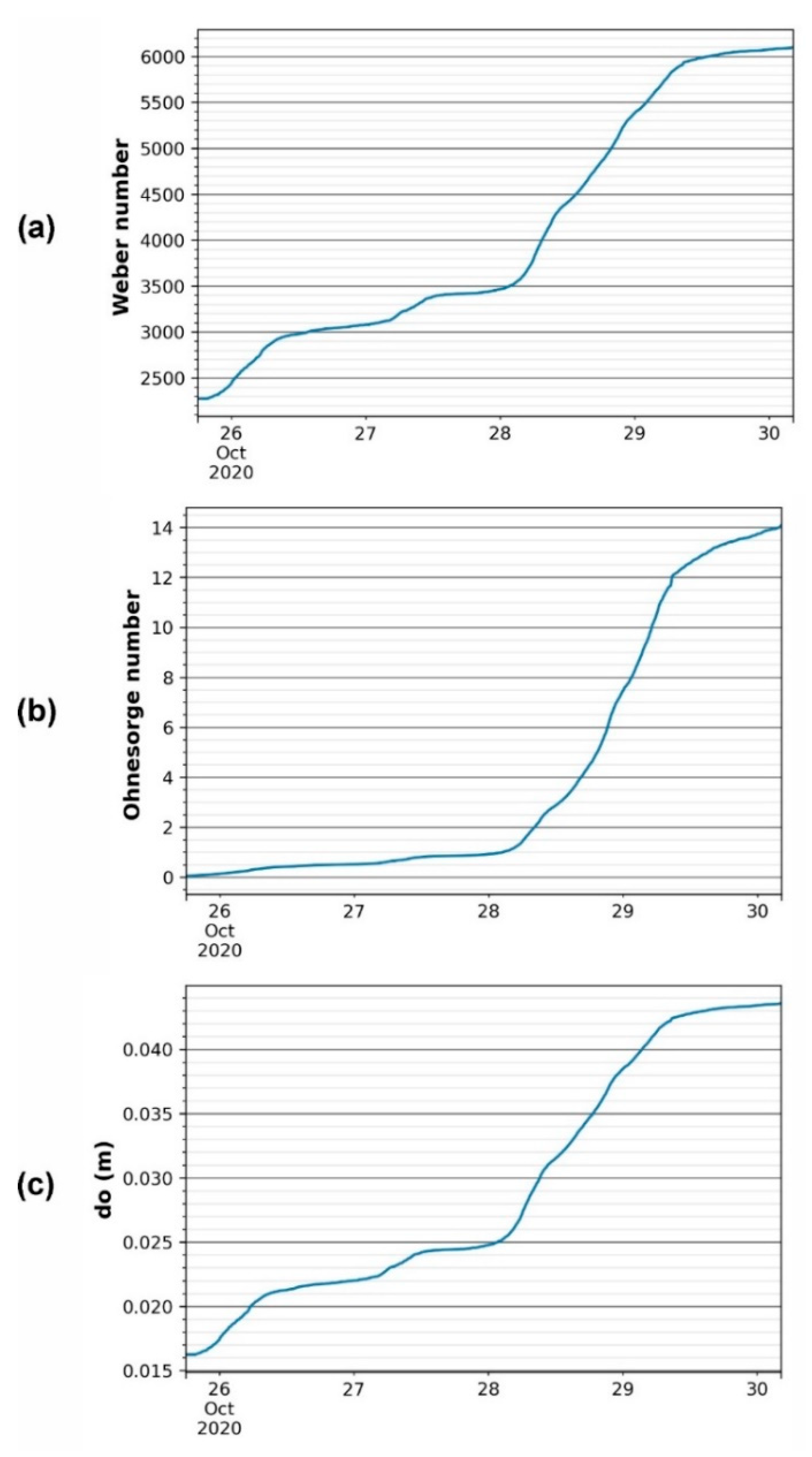
2.2.3. Oil Droplet Size Distribution
2.3. Oil Weathering Processes
2.3.1. Oil Evaporation
2.3.2. Oil Emulsification
2.3.3. Oil Biodegradation
2.4. Experimental Setup
2.5. Model Results Post-Processing
3. Results and Discussion
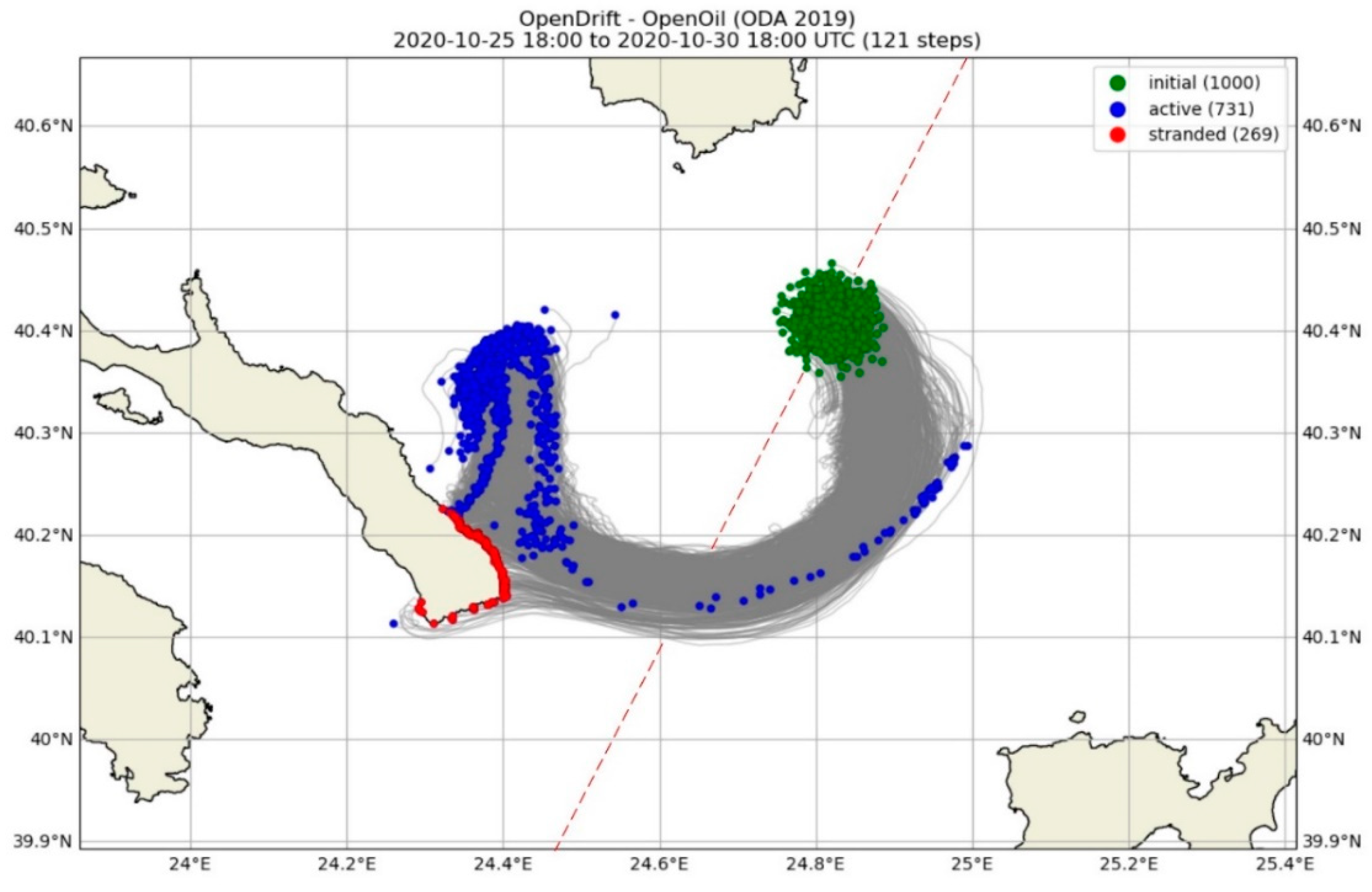
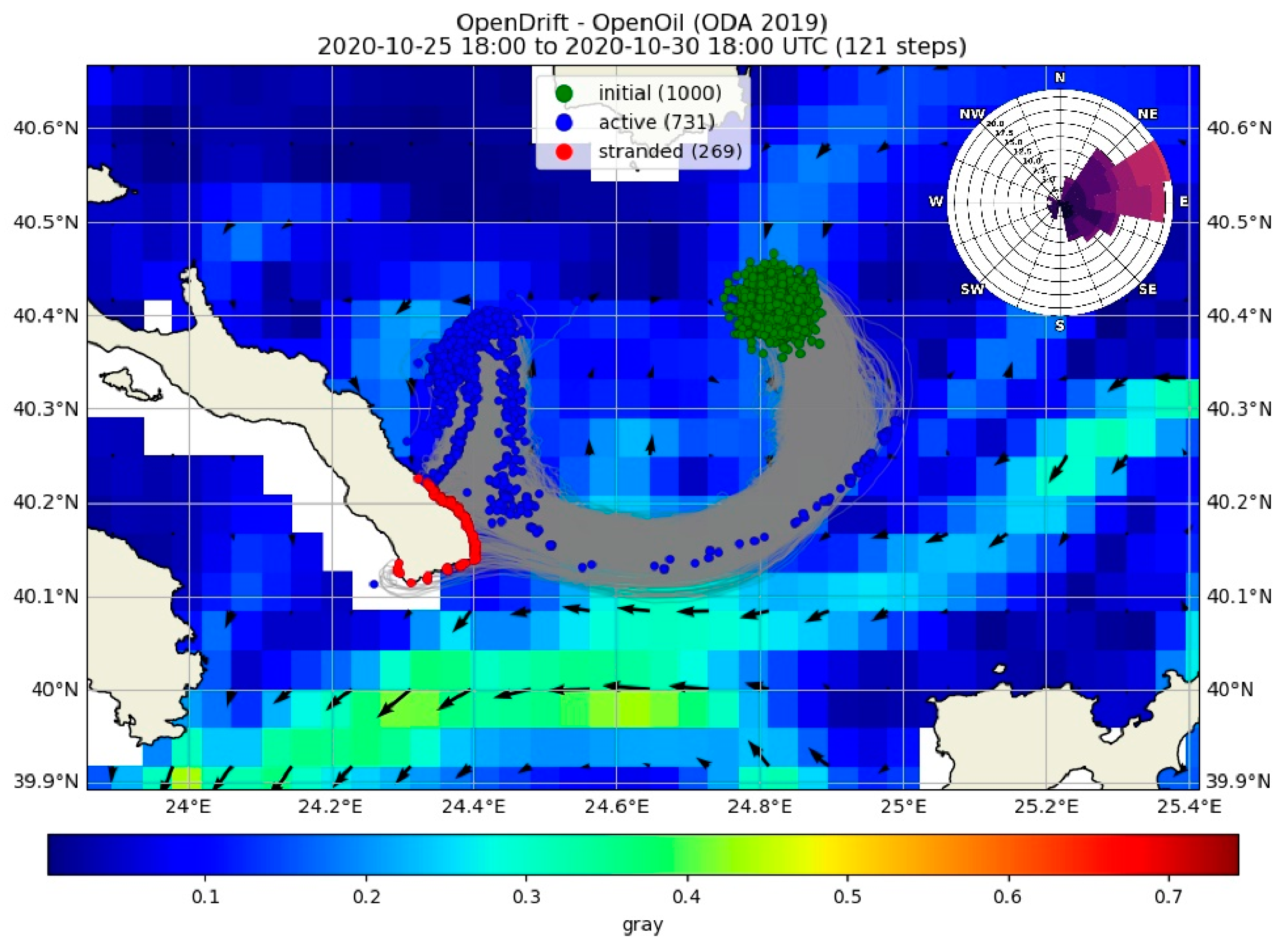
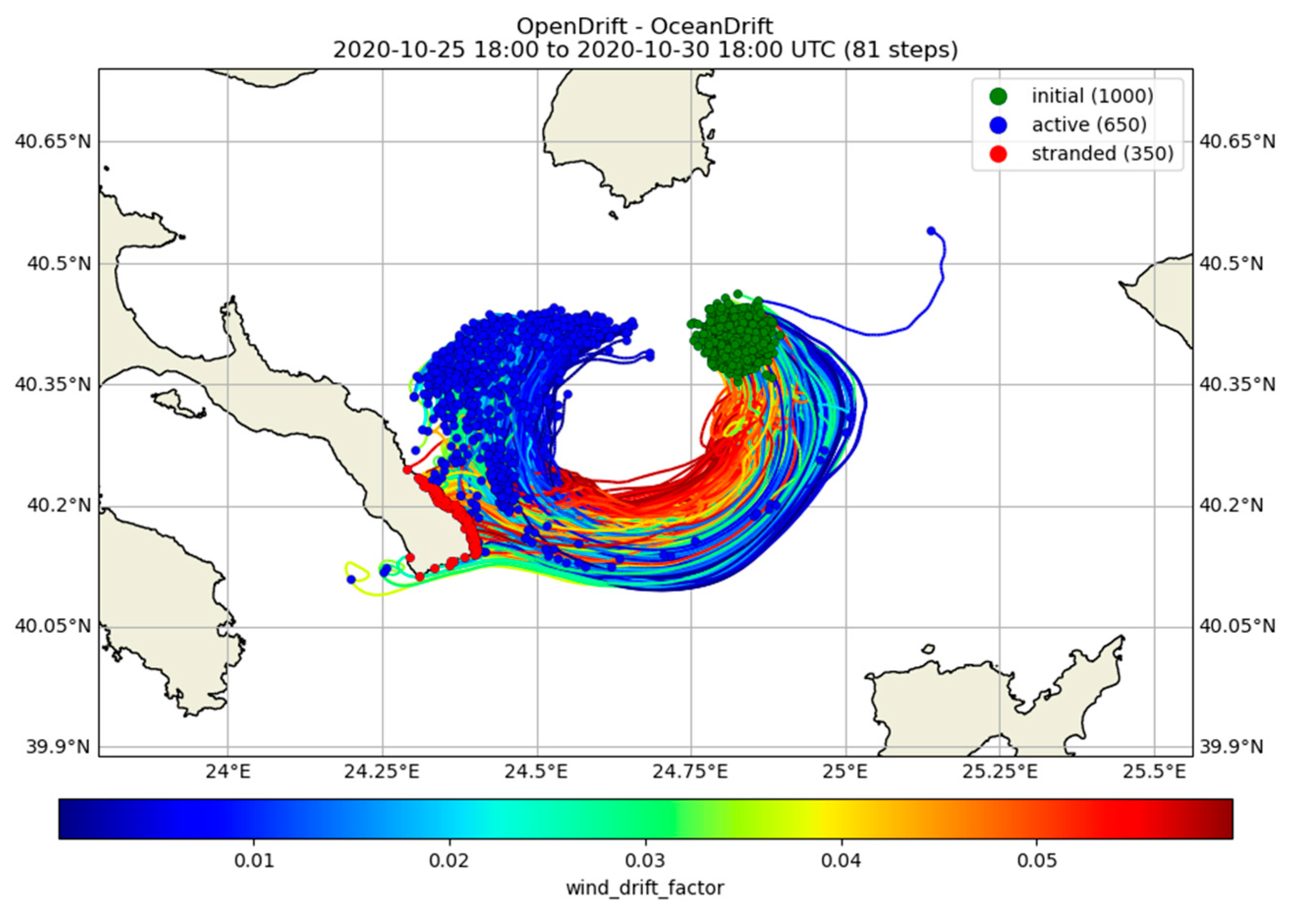
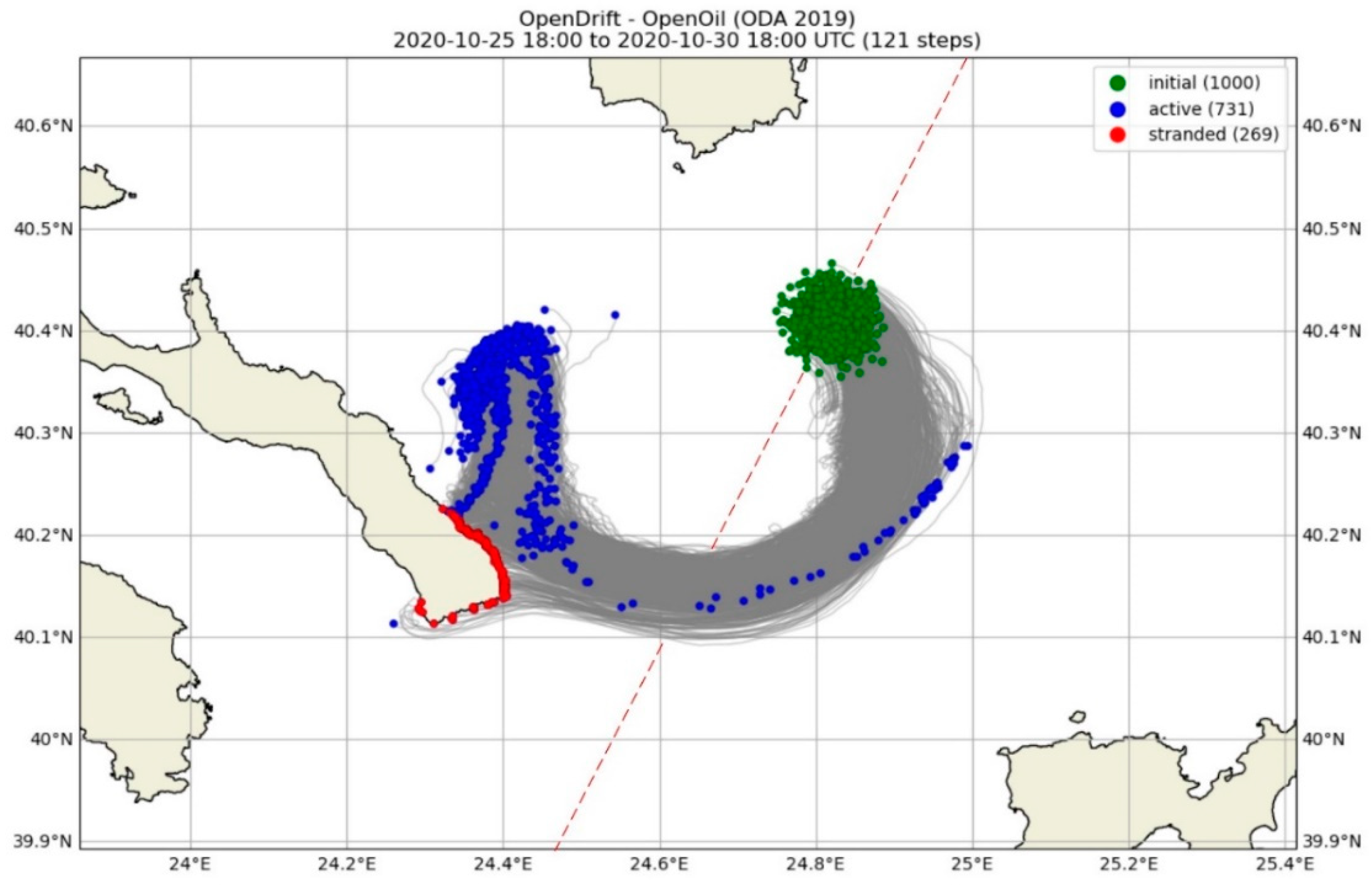
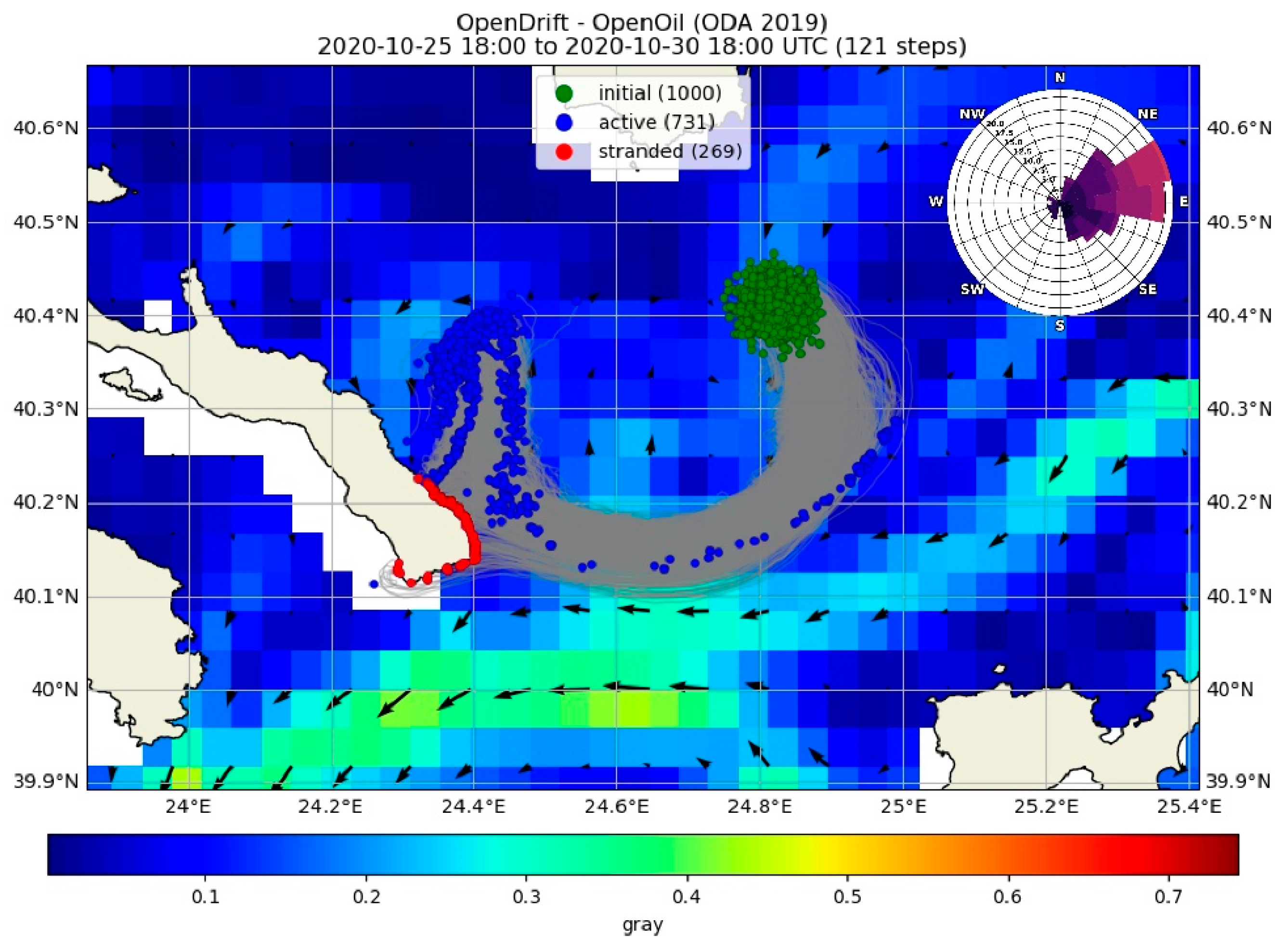
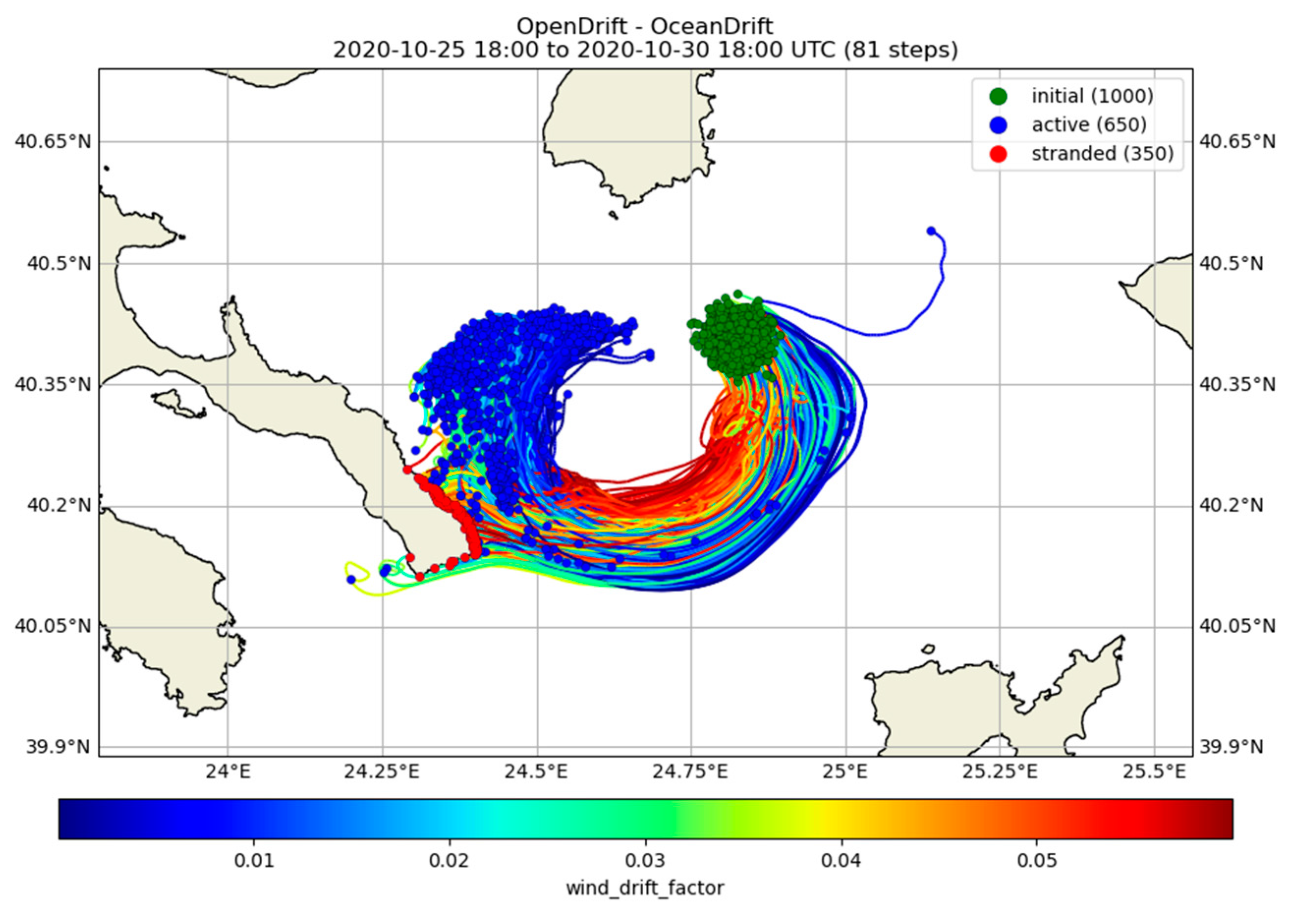
3.1. OpenOil Model Results
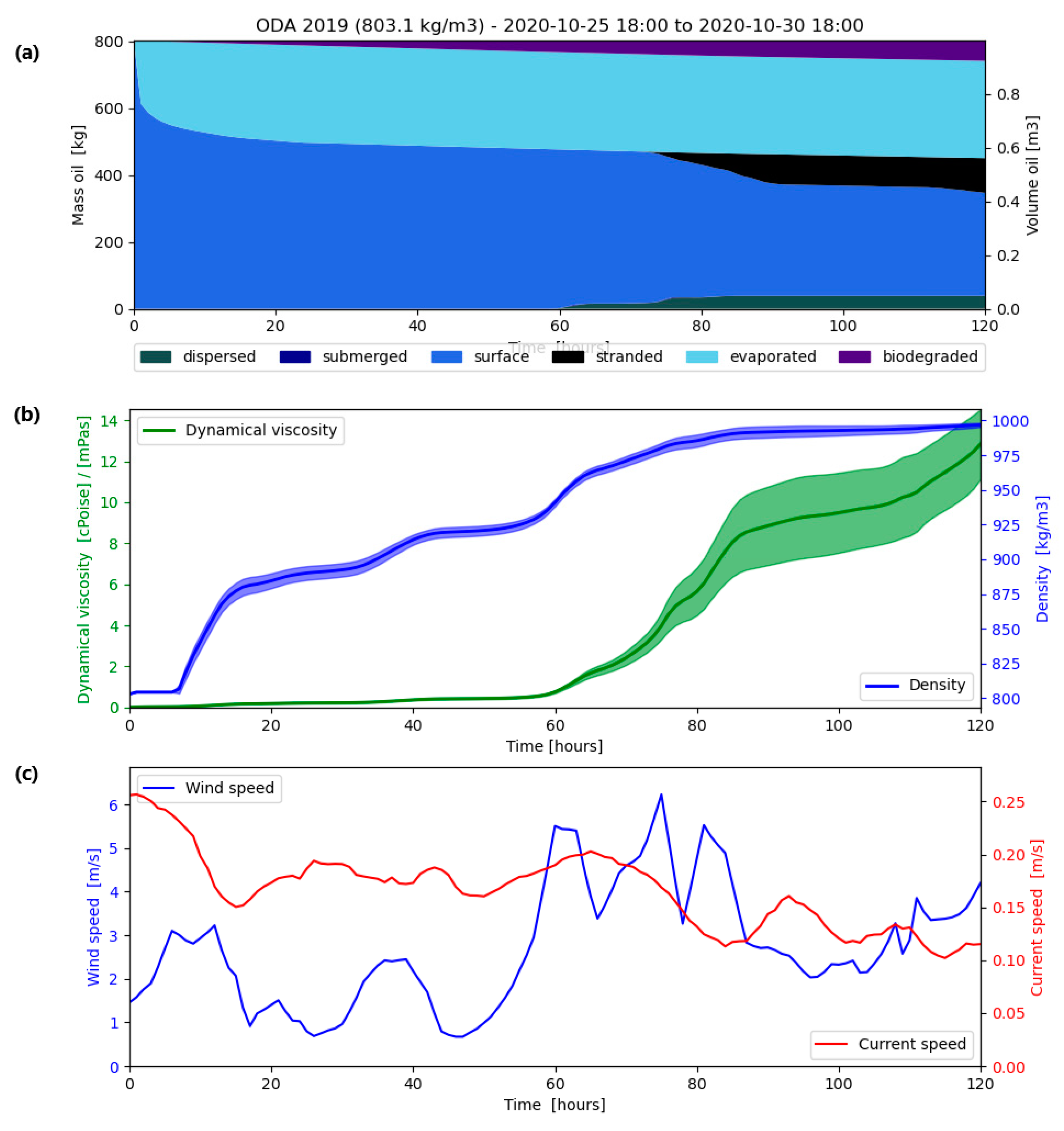
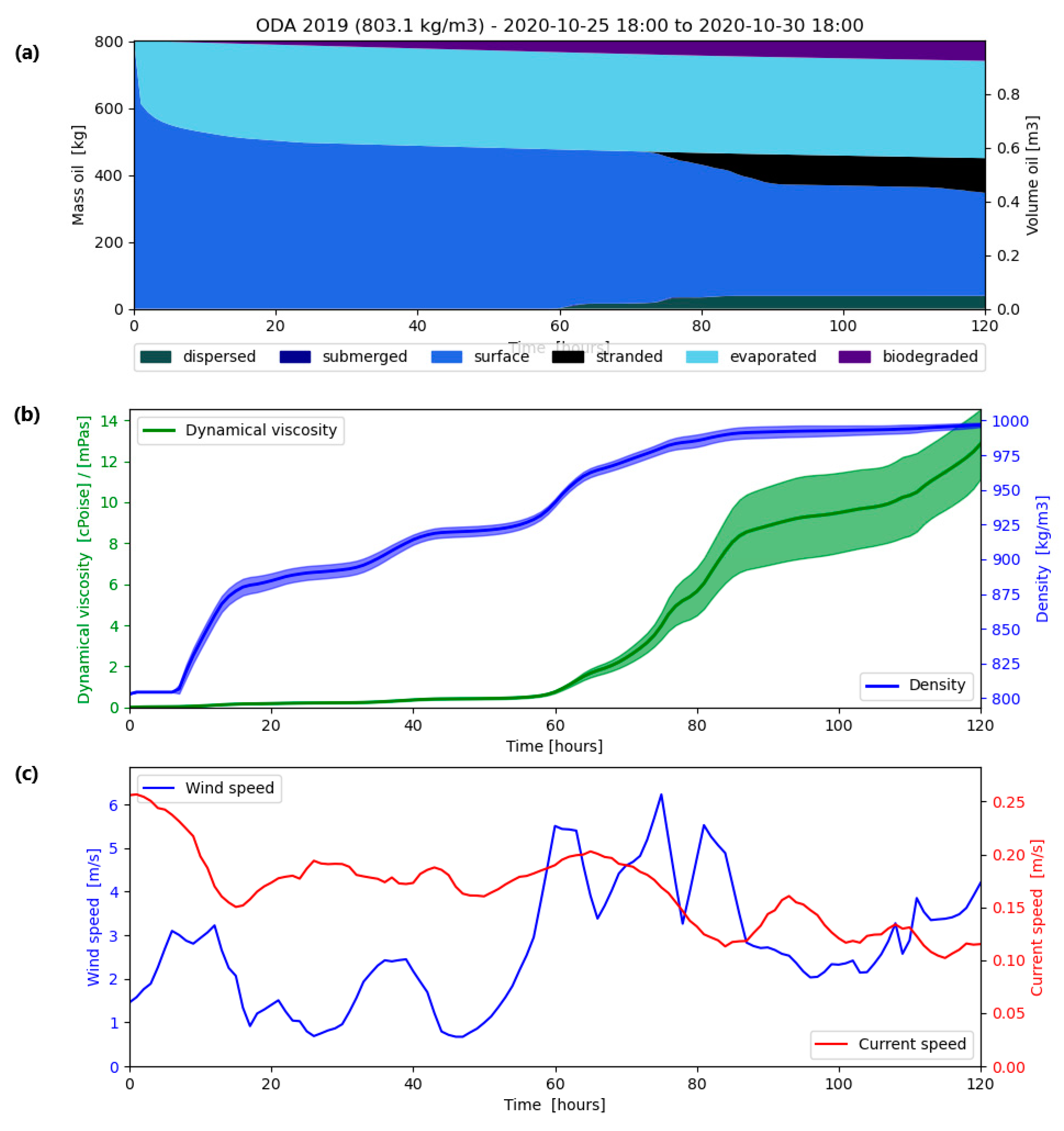
3.2. Oil Budget Analysis
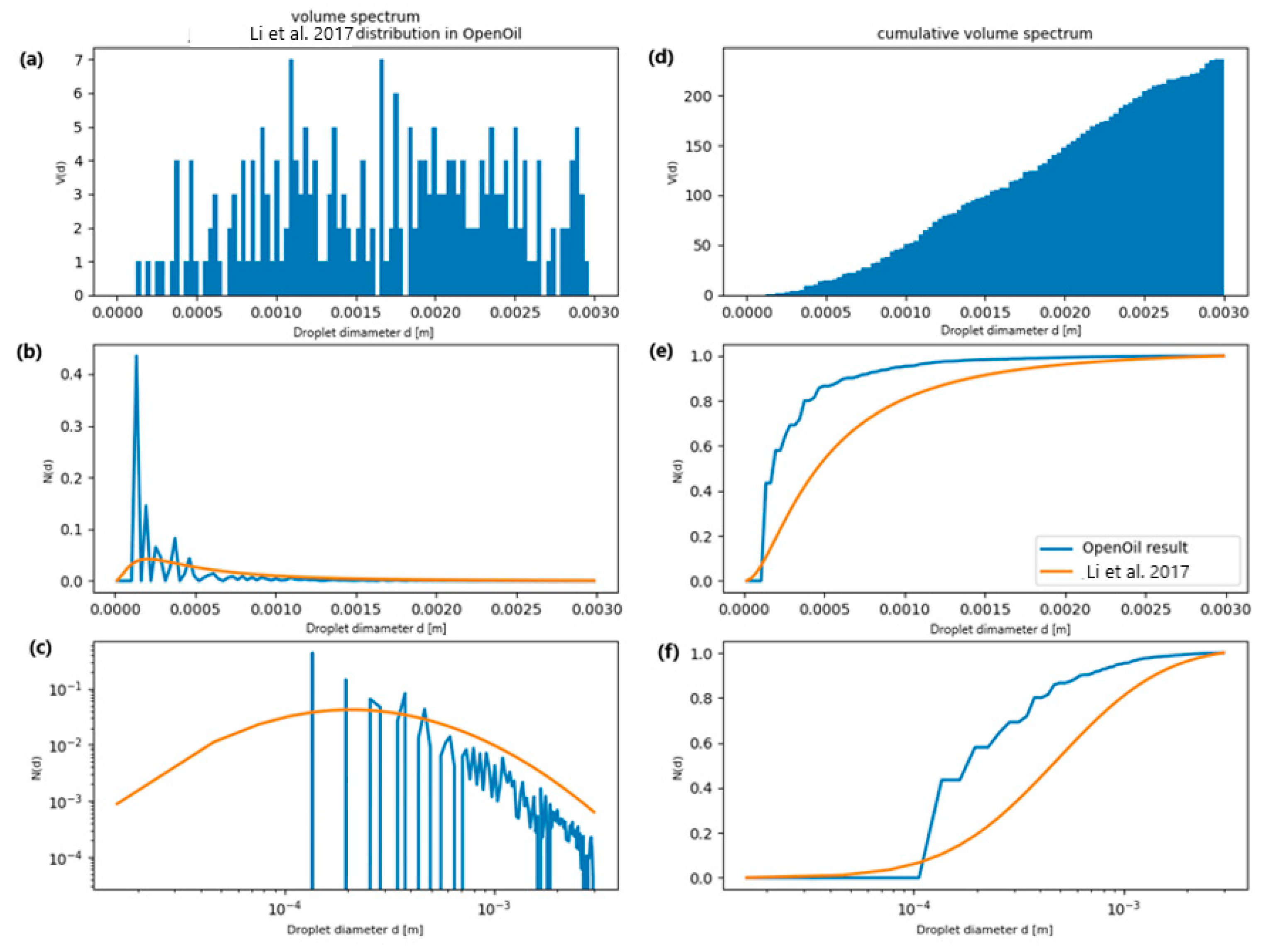
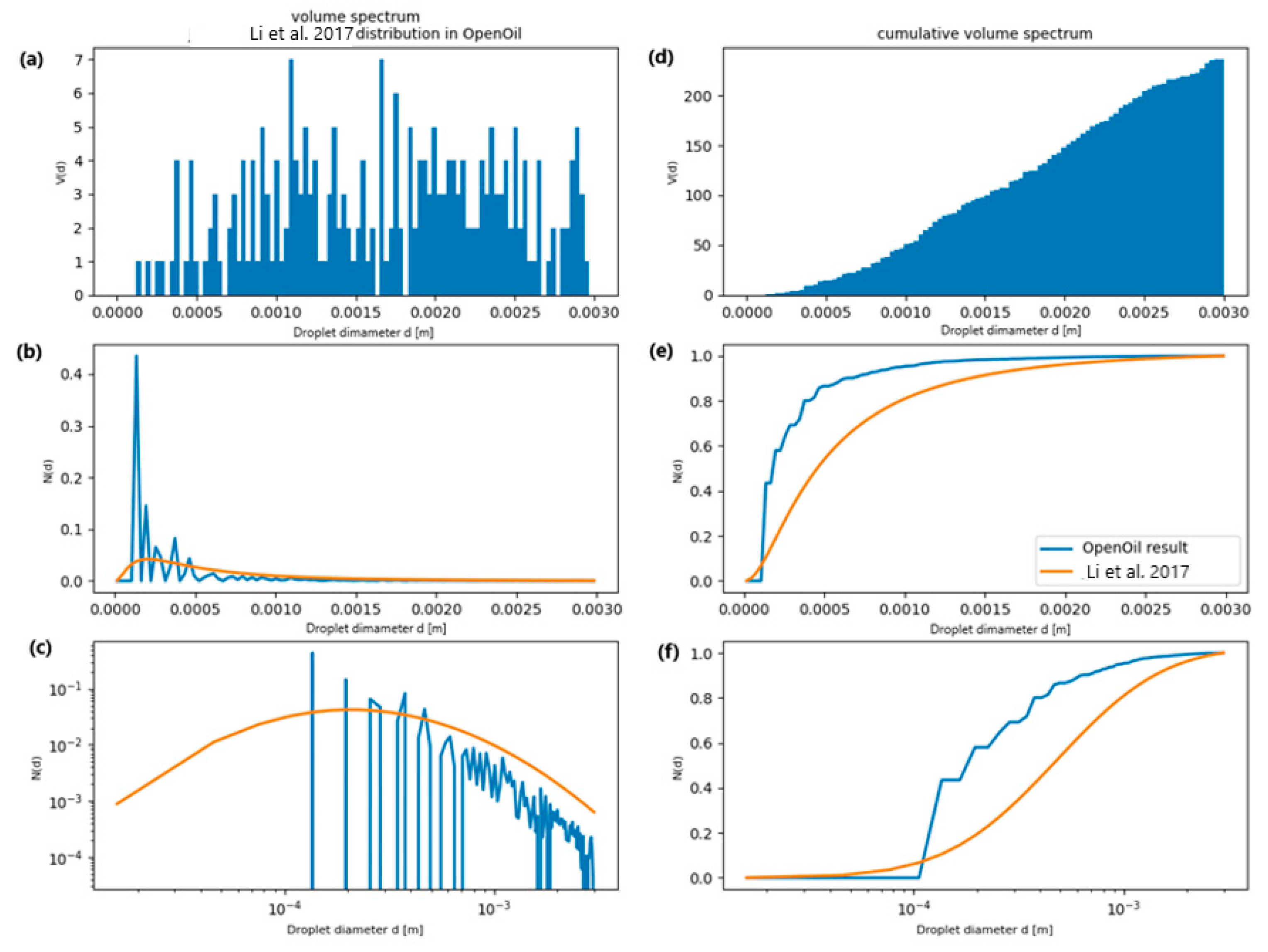
3.3. Oil Droplets’ Size Spectrum
3.4. Wind Drift Analysis
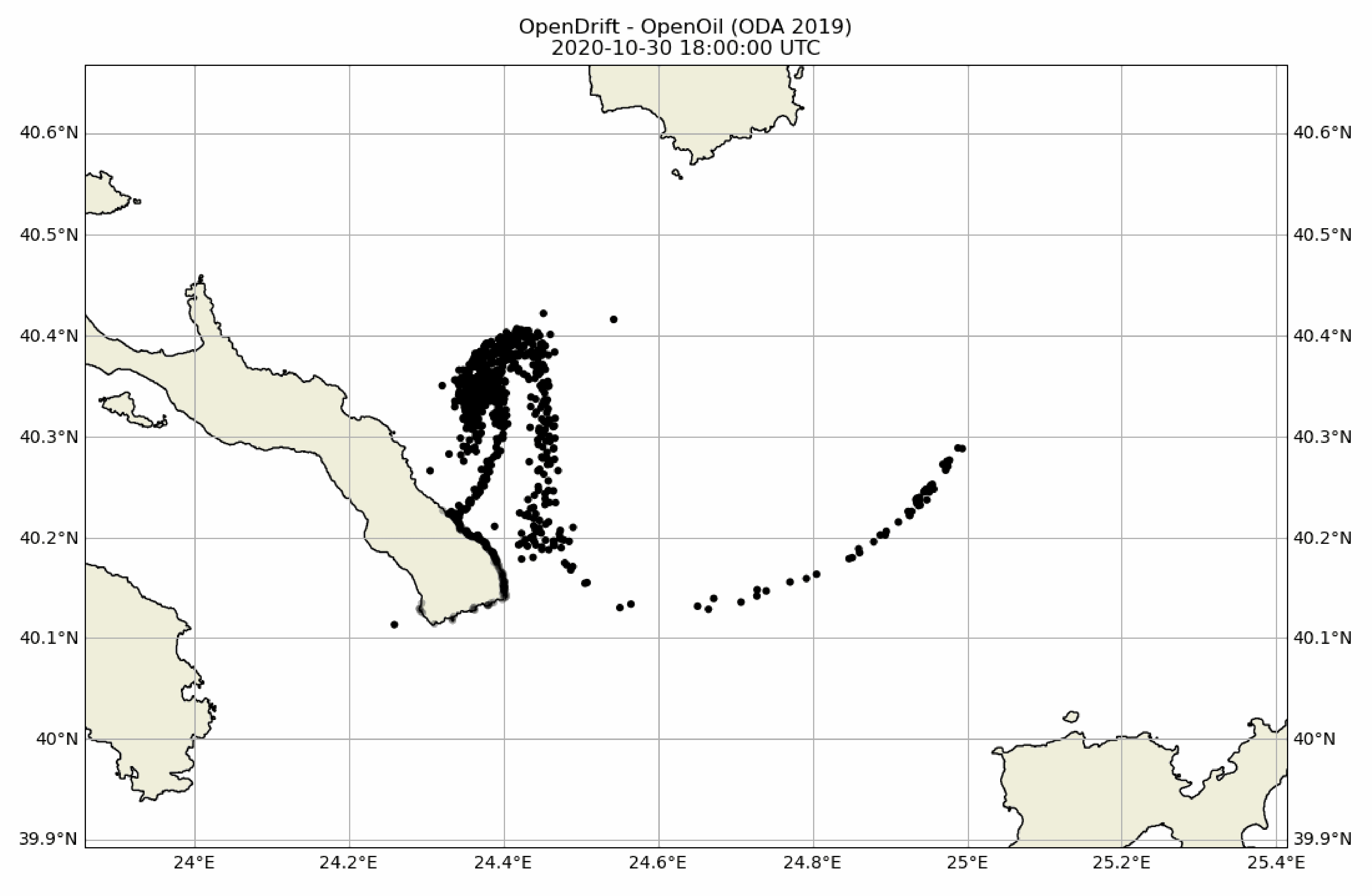
3.5. Oil Particles Dispersion
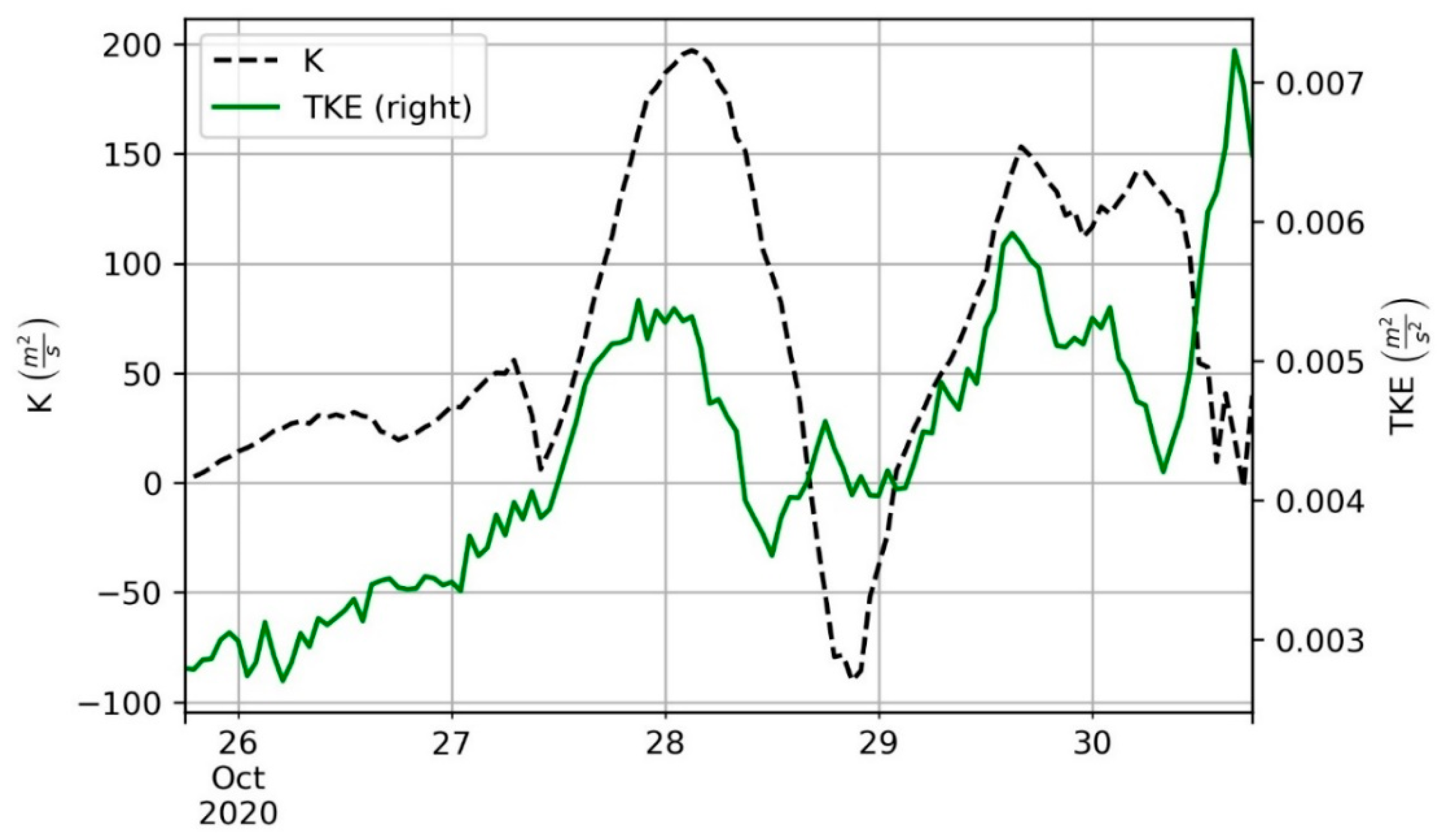
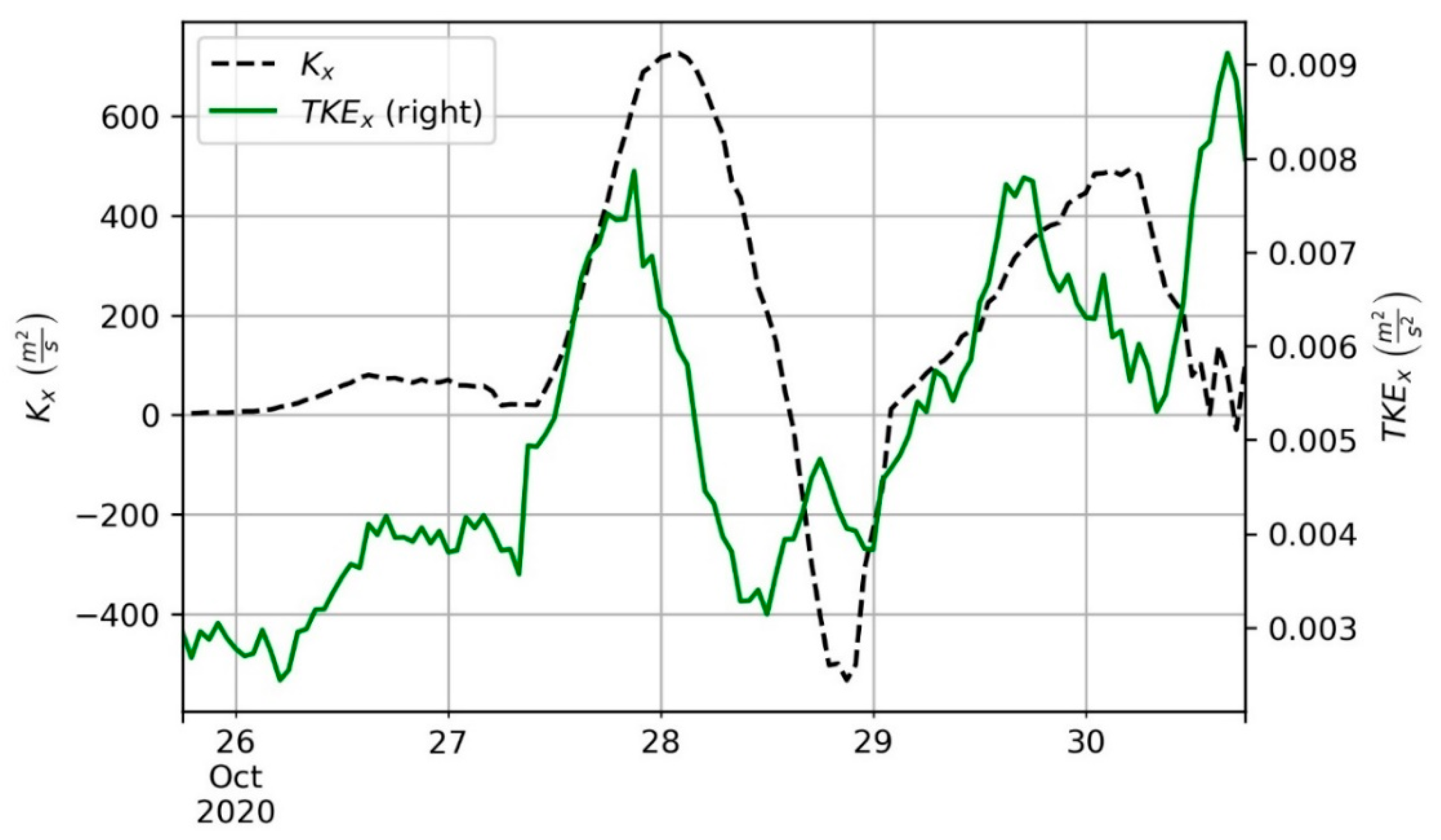
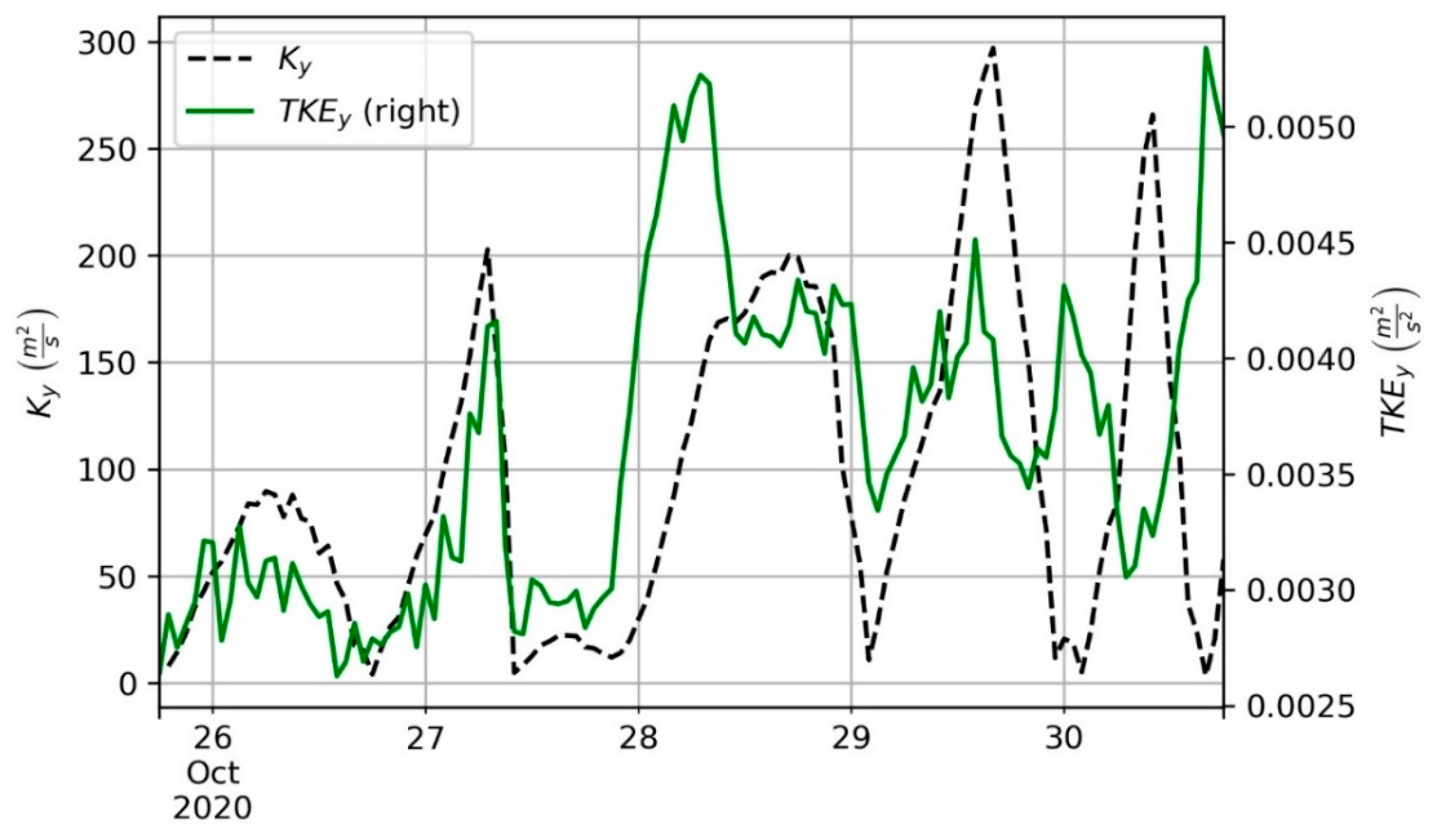
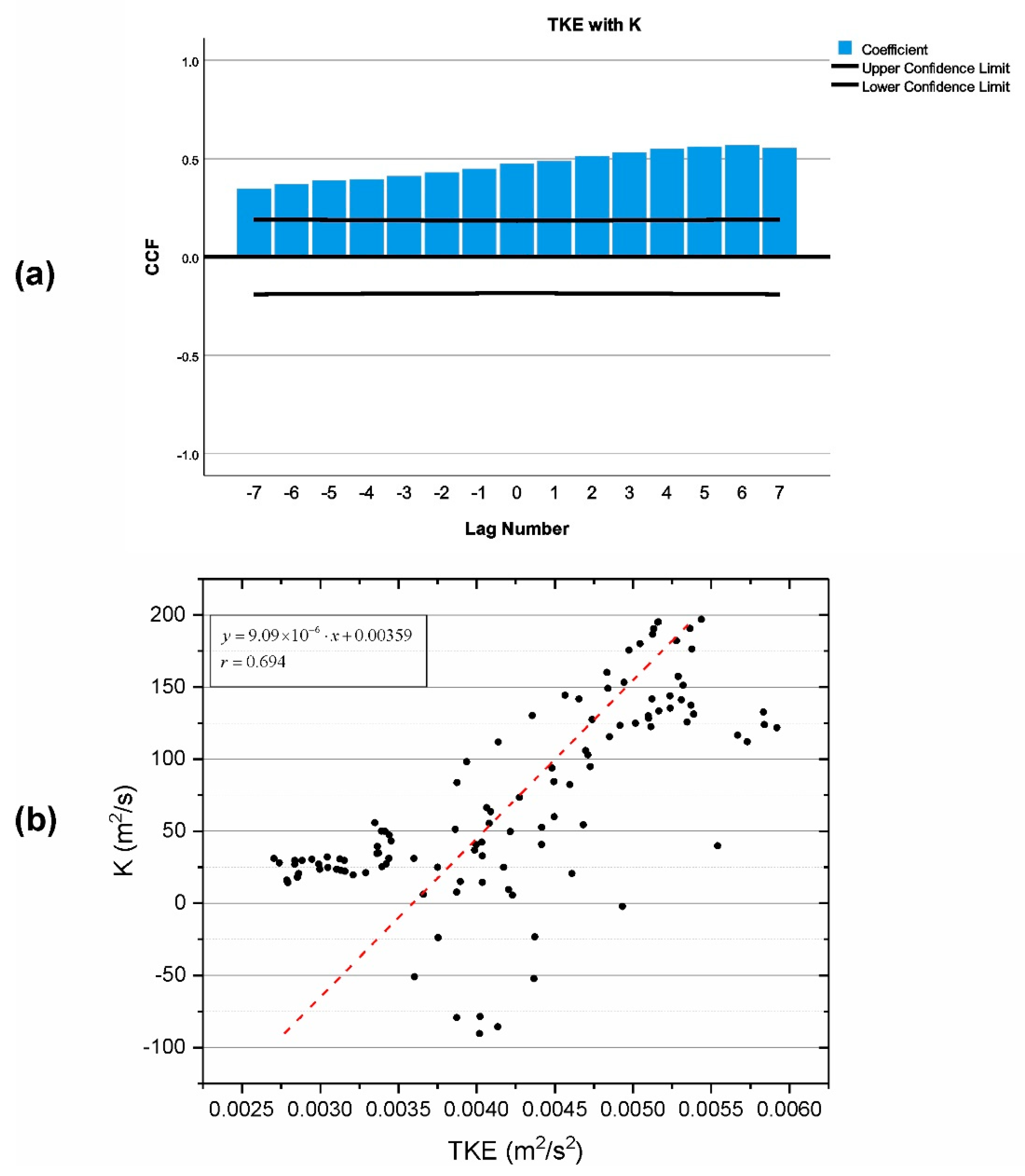
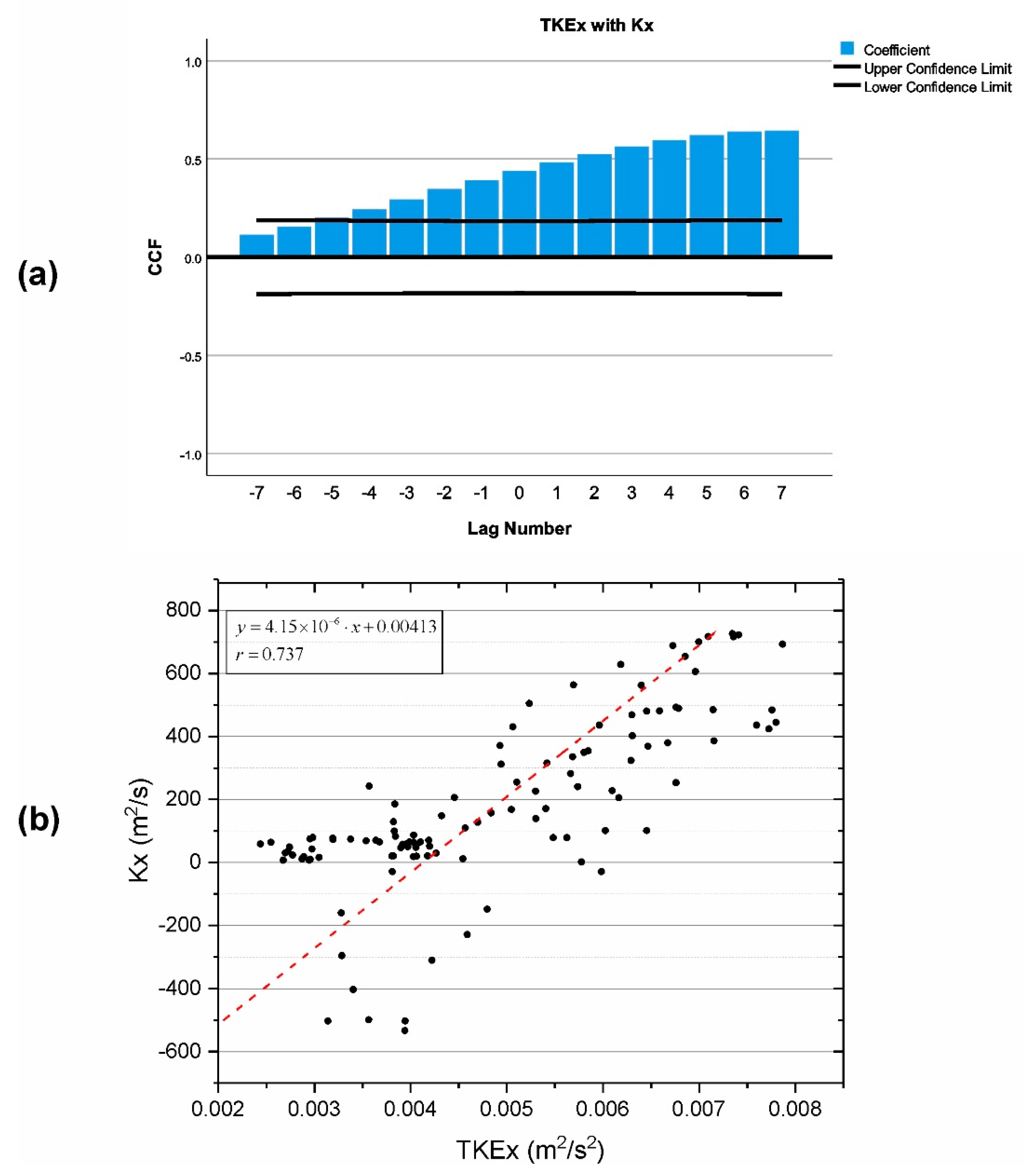
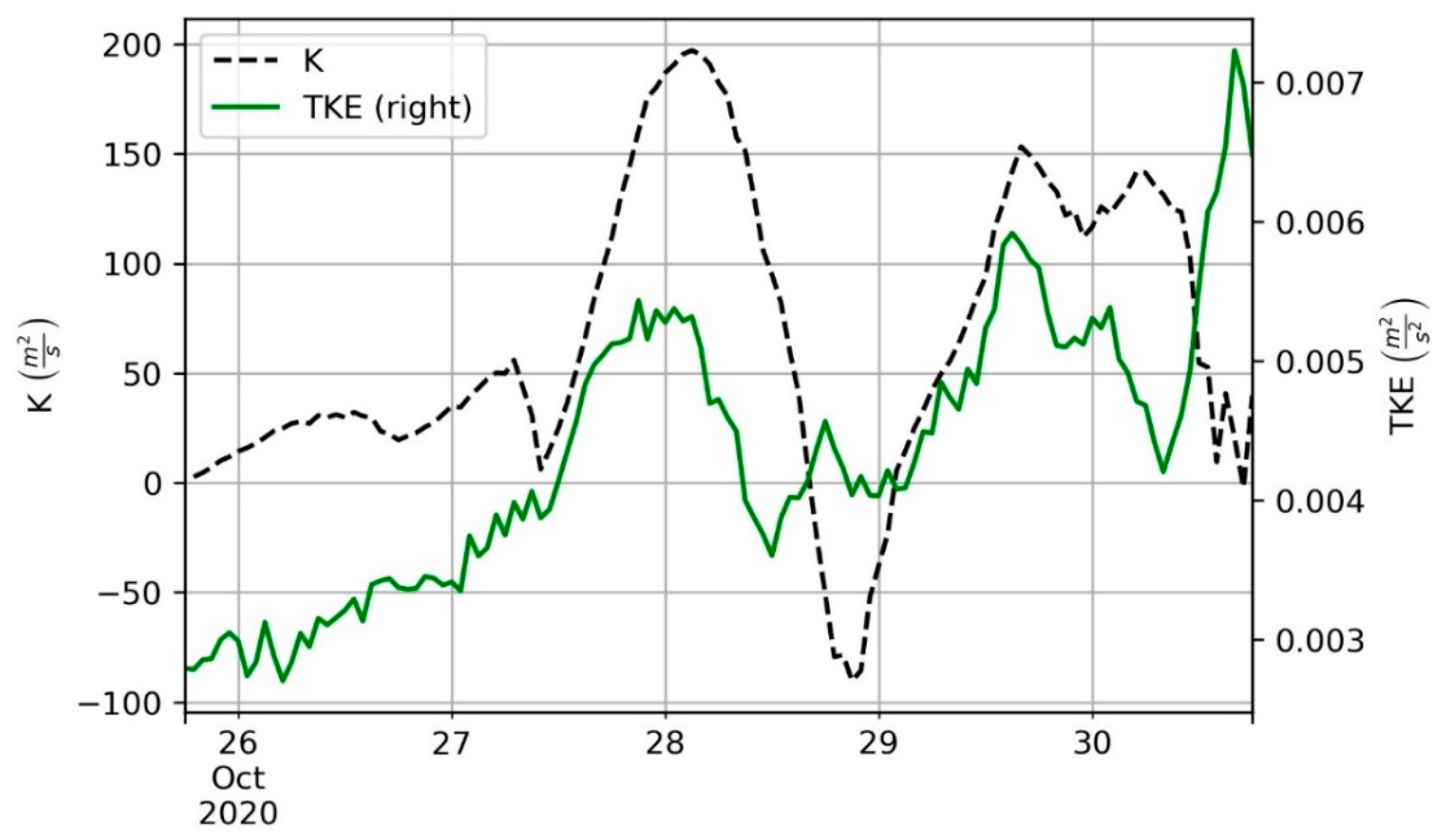
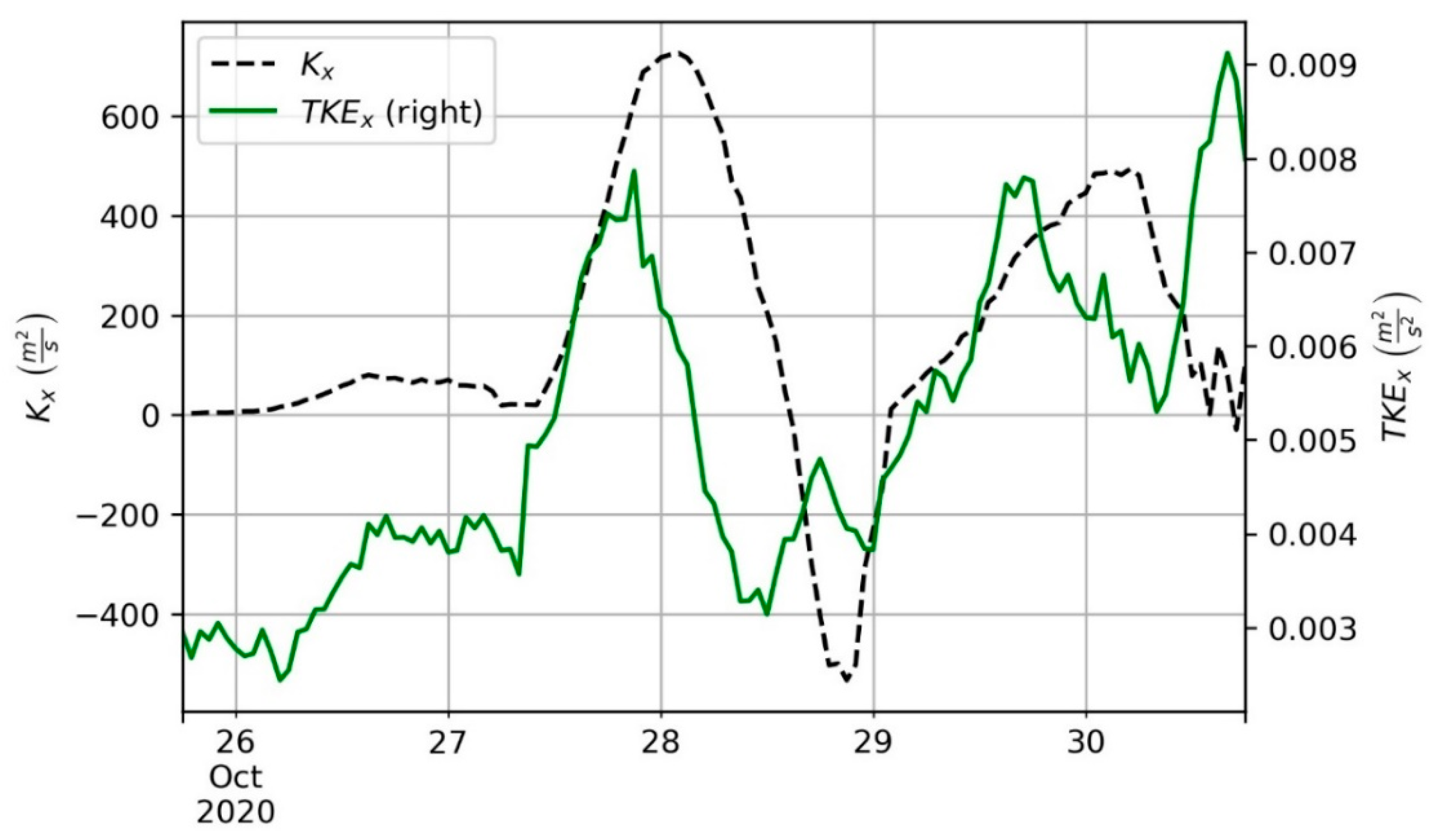
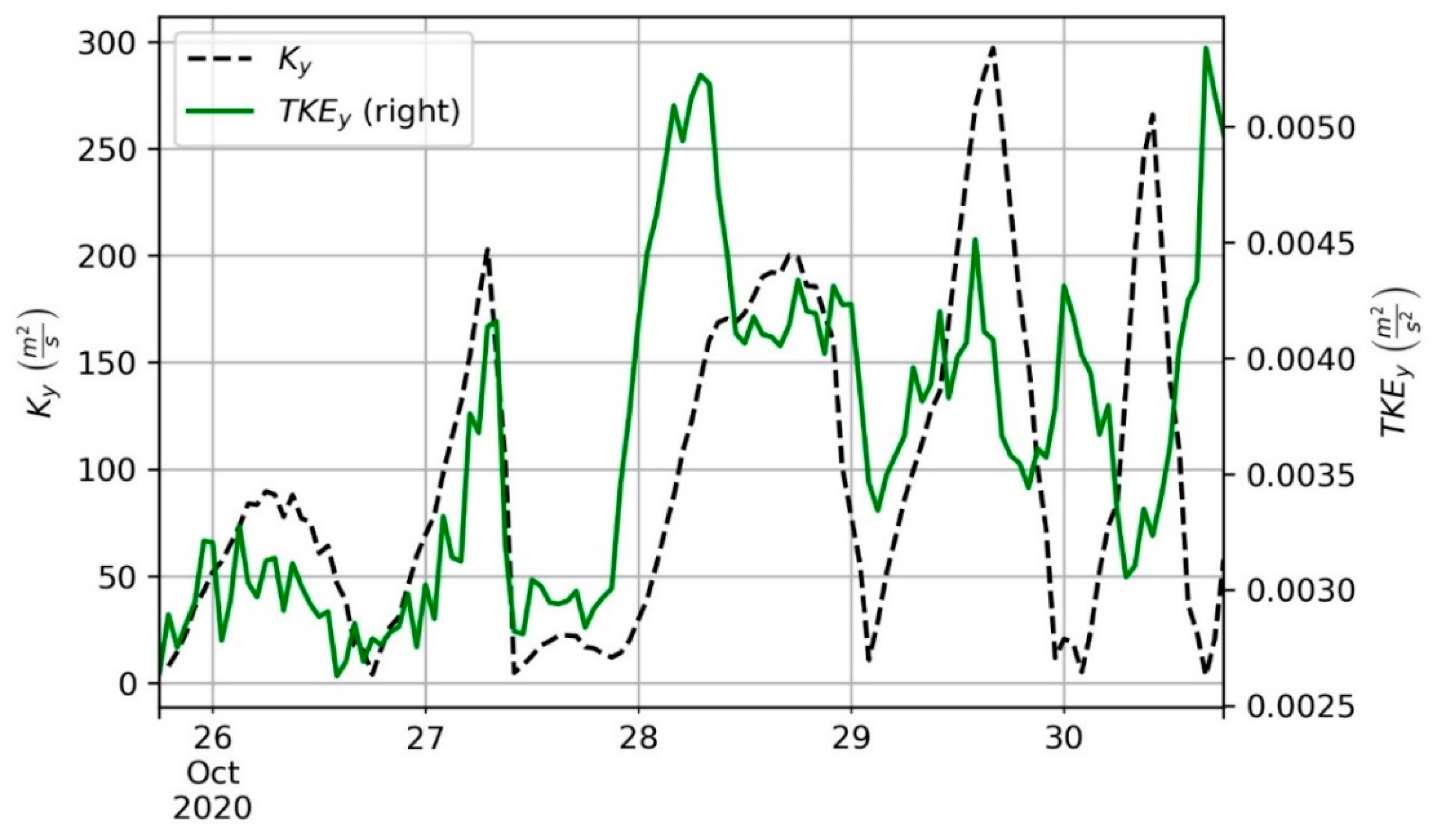
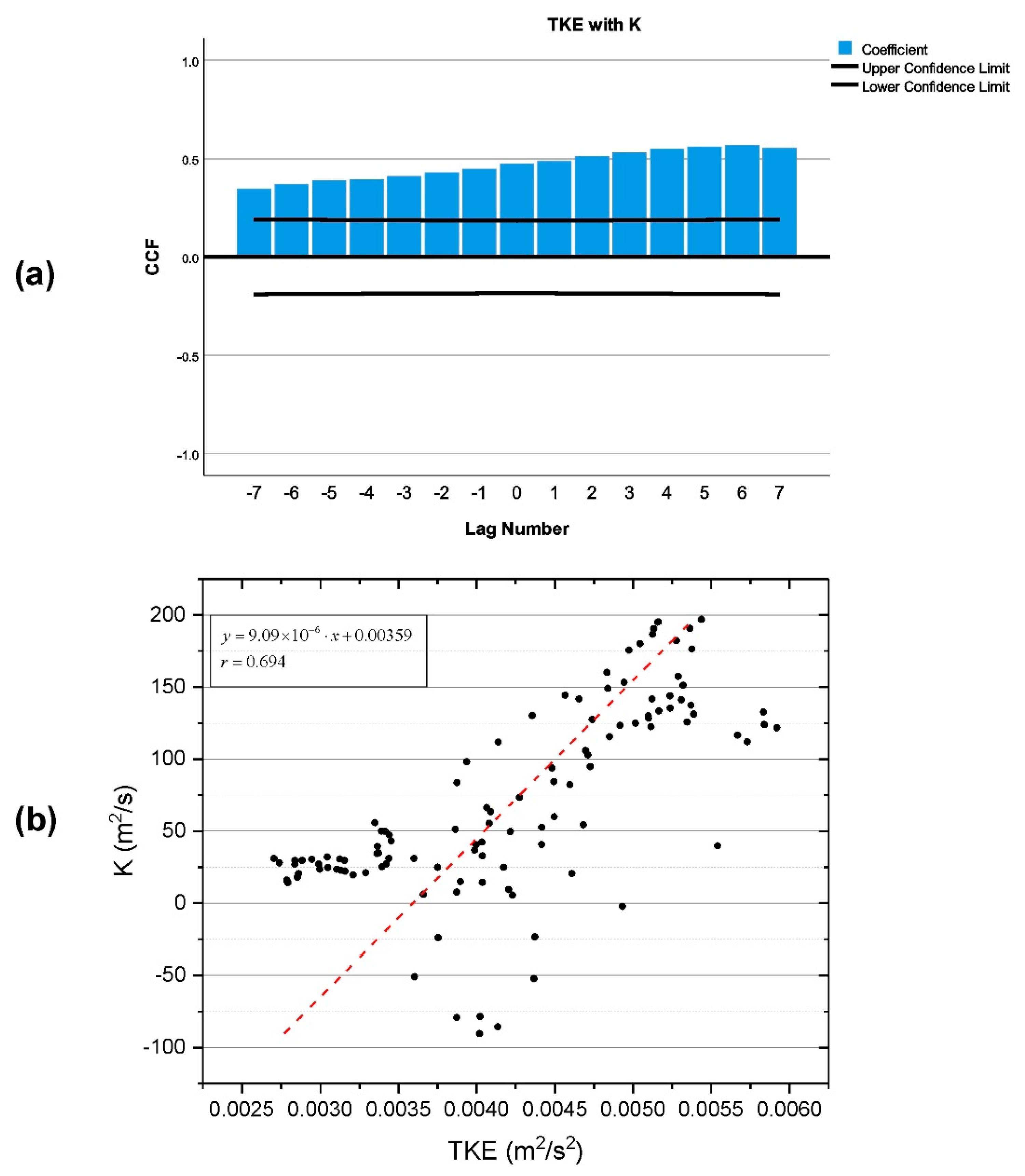
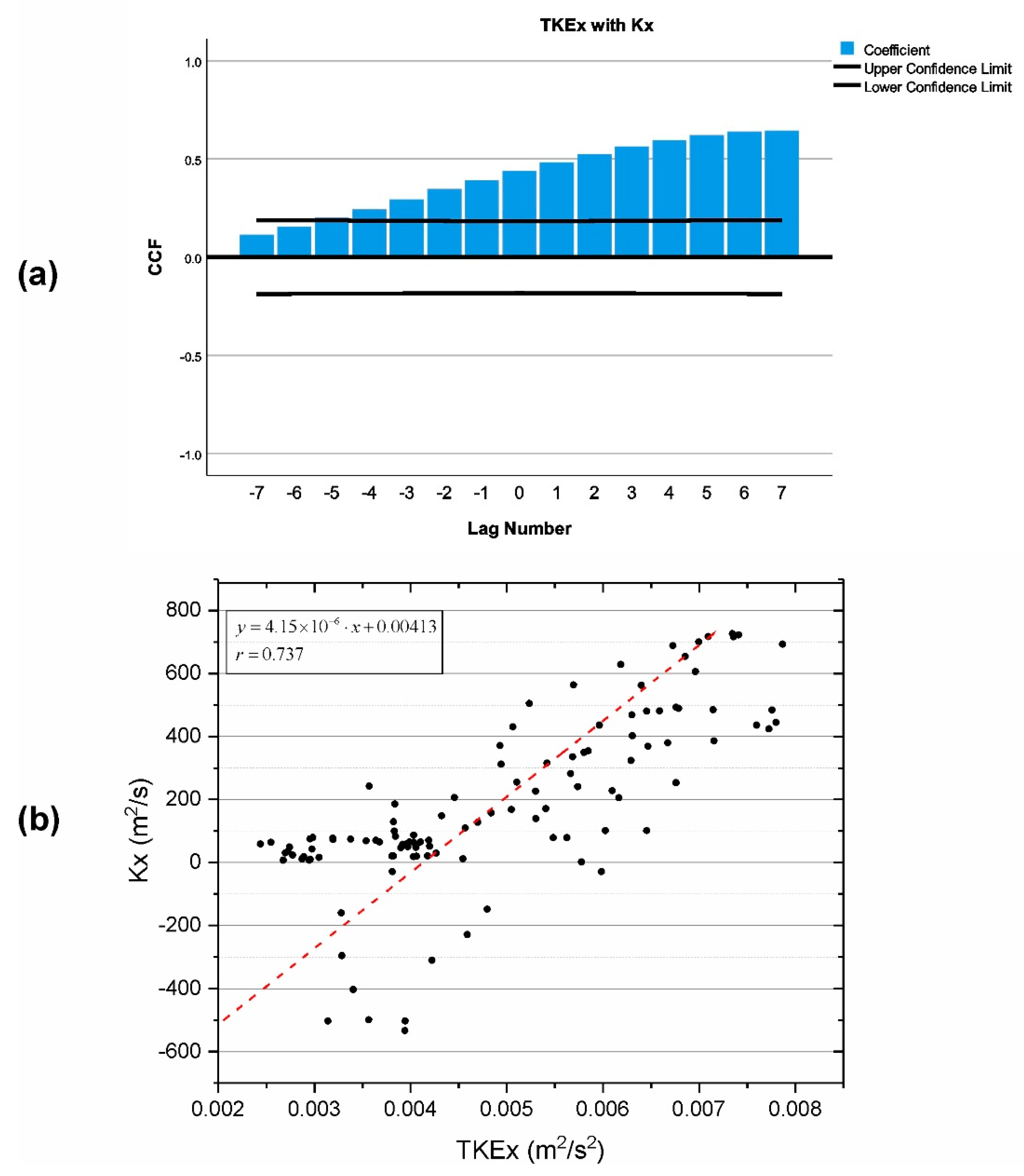
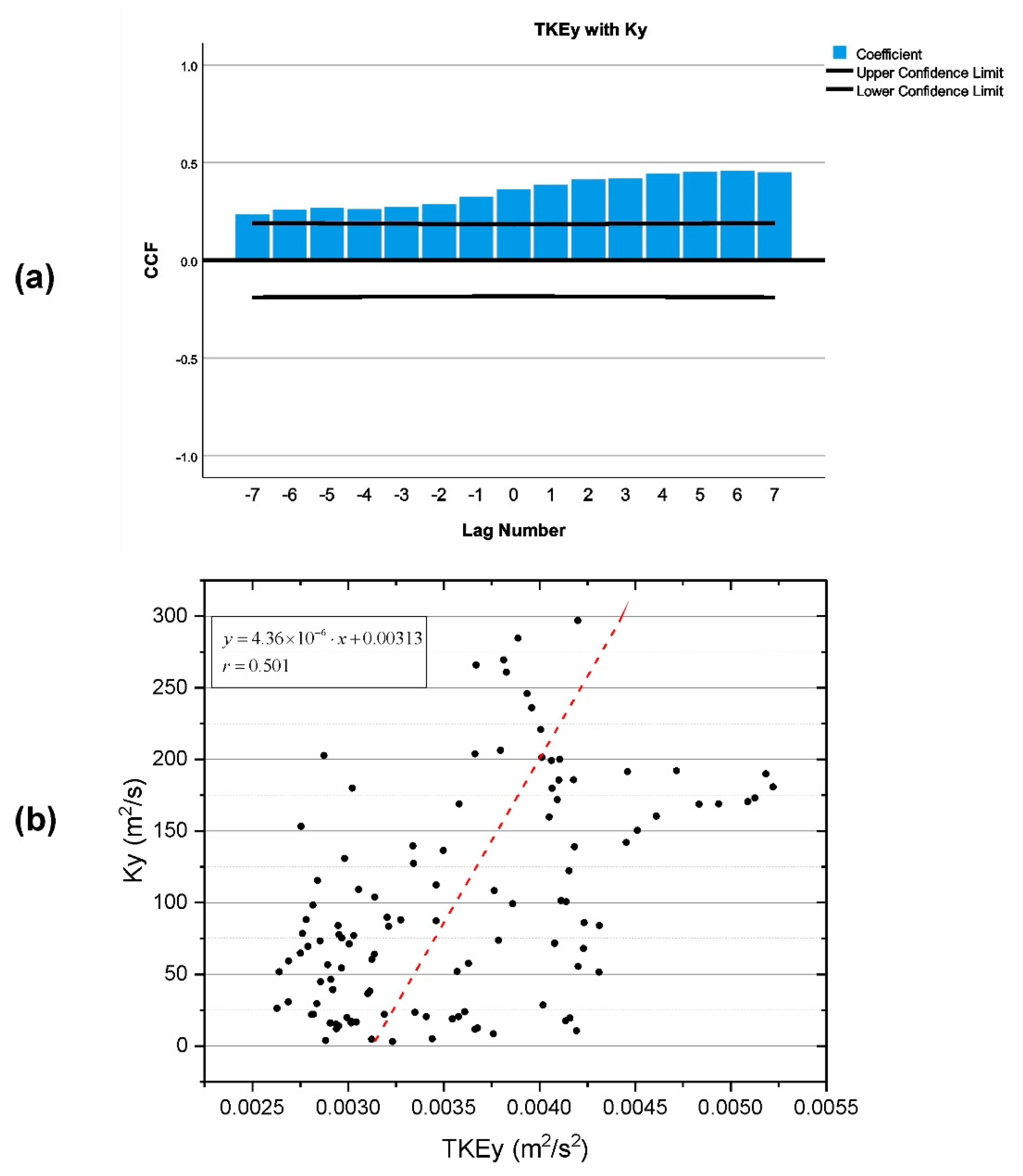
3.6. TKE Impact on Oil Dispersion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brekke, C.; Solberg, A.H.S. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar] [CrossRef]
- Dietrich, J.C.; Trahan, C.J.; Howard, M.T.; Fleming, J.G.; Weaver, R.J.; Tanaka, S.; Yu, L.; Luettich, R.A.; Dawson, C.N.; Westerink, J.J.; et al. Surface trajectories of oil transport along the Northern Coastline of the Gulf of Mexico. Cont. Shelf Res. 2012, 41, 17–47. [Google Scholar] [CrossRef]
- Alves, T.M.; Kokinou, E.; Zodiatis, G. A three-step model to assess shoreline and offshore susceptibility to oil spills: The South Aegean (Crete) as an analogue for confined marine basins. Mar. Pollut. Bull. 2014, 86, 443–457. [Google Scholar] [CrossRef] [PubMed]
- Alves, T.M.; Kokinou, E.; Zodiatis, G.; Lardner, R.; Panagiotakis, C.; Radhakrishnan, H. Modelling of oil spills in confined maritime basins: The case for early response in the Eastern Mediterranean Sea. Environ. Pollut. 2015, 206, 390–399. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alves, T.M.; Kokinou, E.; Zodiatis, G.; Radhakrishnan, H.; Panagiotakis, C.; Lardner, R. Multidisciplinary oil spill modeling to protect coastal communities and the environment of the Eastern Mediterranean Sea. Sci. Rep. 2016, 6, 36882. [Google Scholar] [CrossRef]
- Yang, H.; Hong, B.; Chen, S. Research and application progress of marine oil-spill models. Trans. Oceanol. Limnol. 2007, 2, 156–163. [Google Scholar]
- Holmes, O. ‘It’ll Take Decades to Clean’: Oil Spill Ravages East Mediterranean. Available online: https://www.theguardian.com/world/2021/feb/22/take-decades-clean-oil-spill-oil-spill-ravages-east-mediterranean (accessed on 22 February 2021).
- Gerretsen, I. Mauritius Oil Spill: Questions Mount over Ship Fuel Safety. Available online: https://www.climatechangenews.com/2021/02/19/mauritius-oil-spill-raises-concerns-ship-fuel-safety/ (accessed on 19 February 2021).
- Kourdi, E.; Salem, M.; Qiblawi, T. Syrian Oil Spill Spreads across the Mediterranean. Available online: https://www.cnn.com/2021/08/31/middleeast/syria-cyprus-oil-spill-intl/index.html (accessed on 9 January 2021).
- Blevins, G.; Allen, J. ‘Catastrophic’ California Oil Spill Kills Fish, Damages Wetlands. Available online: https://www.reuters.com/world/us/major-oil-spill-washes-ashore-california-killing-wildlife-2021-10-03/ (accessed on 5 October 2021).
- Fingas, M.; Fieldhouse, B. Water-in-Oil Emulsions: Formation and Prediction. In Handbook of Oil Spill Science and Technology; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015; Volume 225, pp. 225–270. [Google Scholar] [CrossRef]
- Azevedo, A.; Oliveira, A.; Fortunato, A.B.; Zhang, J.; Baptista, A.M. A cross-scale numerical modeling system for management support of oil spill accidents. Mar. Pollut. Bull. 2014, 80, 132–147. [Google Scholar] [CrossRef]
- Keramea, P.; Spanoudaki, K.; Zodiatis, G.; Gikas, G.; Sylaios, G. Oil spill modeling: A critical review on current trends, perspectives, and challenges. J. Mar. Sci. Eng. 2021, 9, 181. [Google Scholar] [CrossRef]
- Barker, C.H.; Kourafalou, V.H.; Beegle-Krause, C.J.; Boufadel, M.; Bourassa, M.A.; Buschang, S.G.; Androulidakis, Y.; Chassignet, E.P.; Dagestad, K.F.; Danmeier, D.G.; et al. Progress in operational modeling in support of oil spill response. J. Mar. Sci. Eng. 2020, 8, 668. [Google Scholar] [CrossRef]
- Zhong, Z.; You, F. Oil spill response planning with consideration of physicochemical evolution of the oil slick: A multiobjective optimization approach. Comput. Chem. Eng. 2011, 35, 1614–1630. [Google Scholar] [CrossRef]
- Röhrs, J.; Dagestad, K.-F.; Asbjørnsen, H.; Nordam, T.; Skancke, J.; Jones, C.E.; Brekke, C. The effect of vertical mixing on the horizontal drift of oil spills. Ocean. Sci. 2018, 14, 1581–1601. [Google Scholar] [CrossRef] [Green Version]
- Dagestad, K.F.; Röhrs, J.; Breivik, O.; Ådlandsvik, B. OpenDrift v1.0: A generic framework for trajectory modelling. Geosci. Model Dev. 2018, 11, 1405–1420. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Miller, J.; Wang, J.; Koley, S.S.; Katz, J. Size distribution and dispersion of droplets generated by impingement of breaking waves on oil slicks. J. Geophys. Res. Ocean. 2017, 122, 7938–7957. [Google Scholar] [CrossRef]
- Visser, A.W. Using random walk models to simulate the vertical distribution of particles in a turbulent water column. Mar. Ecol. Prog. Ser. 1997, 158, 275–281. [Google Scholar] [CrossRef] [Green Version]
- Tkalich, P.; Chan, E.S. Vertical mixing of oil droplets by breaking waves. Mar. Pollut. Bull. 2002, 44, 1219–1229. [Google Scholar] [CrossRef]
- Hole, L.R.; Dagestad, K.-F.; Röhrs, J.; Wettre, C.; Kourafalou, V.H.; Androulidakis, Y.; Kang, H.; le Hénaff, M.; Garcia-Pineda, O. The deepwater horizon oil slick: Simulations of river front effects and oil droplet size distribution. J. Mar. Sci. Eng. 2019, 7, 329. [Google Scholar] [CrossRef] [Green Version]
- Lehr, W.; Jones, R.; Evans, M.; Simecek-Beatty, D.; Overstreet, R. Revisions of the ADIOS oil spill model. Environ. Model. Softw. 2002, 17, 189–197. [Google Scholar] [CrossRef]
- Jones, C.E.; Dagestad, K.F.; Breivik, Ø.; Holt, B.; Röhrs, J.; Christensen, K.H.; Espeseth, M.; Brekke, C.; Skrunes, S. Measurement and modeling of oil slick transport. J. Geophys. Res. Ocean. 2016, 121, 7759–7775. [Google Scholar] [CrossRef]
- Androulidakis, Y.; Kourafalou, V.; Hole, L.R.; Hénaff, M.L.; Kang, H.S. Pathways of oil spills from potential cuban offshore exploration: Influence of ocean circulation. J. Mar. Sci. Eng. 2020, 8, 535. [Google Scholar] [CrossRef]
- Brekke, C.; Espeseth, M.M.; Dagestad, K.F.; Röhrs, J.; Hole, L.R.; Reigber, A. Integrated analysis of multisensor datasets and oil drift simulations—A free-floating oil experiment in the open ocean. J. Geophys. Res. Ocean. 2021, 126, e2020JC016499. [Google Scholar] [CrossRef]
- Kenyon, K.E. Stokes drift for random gravity waves. J. Geophys. Res. 1969, 74, 6991–6994. [Google Scholar] [CrossRef]
- Ardhuin, F.; Marié, L.; Rascle, N.; Forget, P.; Roland, A. Observation and estimation of lagrangian, stokes, and Eulerian currents induced by wind and waves at the sea surface. J. Phys. Oceanogr. 2009, 39, 2820–2838. [Google Scholar] [CrossRef]
- Lamarre, E.; Melville, W.K. Air entrainment and dissipation in breaking waves. Nature 1991, 351, 469–472. [Google Scholar] [CrossRef]
- Delvigne, G.A.L.; Sweeney, C.E. Natural dispersion of oil. Oil Chem. Pollut. 1989, 4, 281–310. [Google Scholar] [CrossRef]
- Delvigne, G.A.L.; Hulsen, L.J.M. Simplified Laboratory Measurements of Oil Dispersion Coefficient Application in Computations of Natural Oil Dispersion. In Proceedings of the Seventeenth Arctic and Marine Oil Spill Program (AMOP) Technical Seminar, Vancouver, BC, Canada, 8–10 June 1994; Volume 1, pp. 173–187. [Google Scholar]
- Reed, M.; Turner, C.; Odulo, A. The role of wind and emulsification in modelling oil spill and surface drifter trajectories. Spill Sci. Technol. Bull. 1994, 1, 143–157. [Google Scholar] [CrossRef]
- Holthuijsen, L.H.; Herbers, T.H.C. Statistics of breaking waves observed as whitecaps in the open sea. J. Phys. Oceanogr. 1986, 16, 290–297. [Google Scholar] [CrossRef] [Green Version]
- Reed, M.; Johansen, O.; Leirvik, F.; Brørs, B. Numerical algorithm to compute the effects of breakingwaves on surface oil spilled at sea. Final. Rep. Submitt. Coast. Response Res. Center Rep. F 2009, 10968, 131. [Google Scholar]
- Grace, J.R.; Wairegi, T.; Brophy, J. Break-up of drops and bubbles in stagnant media. Can. J. Chem. Eng. 1978, 56, 3–8. [Google Scholar] [CrossRef]
- Ohnesorge, W.V. Formation of Drops by Nozzles and the Breakup of Liquid Jets; Mech: Berlin, Germany, 1936; Volume 16, pp. 355–358. [Google Scholar]
- Lefebvre, A.H.; McDonell, V.G. Atomization and Sprays; CRC Press: Boca Raton, FL, USA, 2017; pp. 1–284. [Google Scholar] [CrossRef]
- Raj, P.P.K. Theoretical Study to Determine the Sea State Limit for the Survival of Oil Slicks on the Ocean; Little (Arthur D) Inc.: Cambridge, MA, USA, 1977. [Google Scholar]
- Thygesen, U.H.; Ådlandsvik, B. Simulating vertical turbulent dispersal with finite volumes and binned random walks. Mar. Ecol. Prog. Ser. 2007, 347, 145–153. [Google Scholar] [CrossRef] [Green Version]
- Johansen, Ø.; Reed, M.; Bodsberg, N.R. Natural dispersion revisited. Mar. Pollut. Bull. 2015, 93, 20–26. [Google Scholar] [CrossRef]
- Stiver, W.; Mackay, D. Evaporation rate of spills of hydrocarbons and petroleum mixtures. Environ. Sci. Technol. 1984, 18, 834–840. [Google Scholar] [CrossRef] [PubMed]
- Jones, R.K. A Simplified Pseudo-Component Oil Evaporation Model. In Proceedings of the 20th Arctic and Marine Oil Spill Program Technical Seminar, Vancouver, BC, Canada, 11–13 June 1997; pp. 43–61. [Google Scholar]
- Lyman, W.J.; Reehl, W.F.; Rosenblatt, D.H. Handbook of Chemical Property Estimation Methods: Environmental Behavior of Organic Compounds; American Chemical Society: Washington, DC, USA, 1990. [Google Scholar]
- Mackay, D.; Buist, I.; Mascarenhas, R.; Patterson, S. Oil Spill Processes and Models; Technical Report No. EE/8; Environ. Can.: Ottawa, ON, Canada, 1980; 17p. [Google Scholar]
- Eley, D.D.; Hey, M.J.; Symonds, J.D. Emulsions of water in asphaltene-containing oils 1. Droplet size distribution and emulsification rates. Colloids Surf. 1988, 32, 87–101. [Google Scholar] [CrossRef]
- Ławniczak, Ł.; Woźniak-Karczewska, M.; Loibner, A.P.; Heipieper, H.J.; Chrzanowski, Ł. Microbial degradation of hydrocarbons—Basic principles for bioremediation: A review. Molecules 2020, 25, 856. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kostka, J.E.; Joye, S.B.; Overholt, W.; Bubenheim, P.; Hackbusch, S.; Larter, S.R.; Liese, A.; Lincoln, S.A.; Marietou, A.; Müller, R.; et al. Biodegradation of Petroleum Hydrocarbons in the Deep Sea. In Deep Oil Spills; Springer: Cham, Germany, 2020; pp. 107–124. [Google Scholar] [CrossRef]
- Das, N.; Chandran, P. Microbial degradation of petroleum hydrocarbon contaminants: An overview. Biotechnol. Res. Int. 2011, 2011, 941810. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Adcroft, A.; Hallberg, R.; Dunne, J.P.; Samuels, B.L.; Galt, J.A.; Barker, C.H.; Payton, D. Simulations of underwater plumes of dissolved oil in the Gulf of Mexico. Geophys. Res. Lett. 2010, 37. [Google Scholar] [CrossRef] [Green Version]
- Sentchev, A.; Korotenko, K. Dispersion processes and transport pattern in the ROFI system of the eastern English Channel derived from a particle-tracking model. Cont. Shelf Res. 2005, 25, 2294–2308. [Google Scholar] [CrossRef]
- Signell, R.P.; Geyer, W.R. Numerical Simulation of Tidal Dispersion around A Coastal Headland. In Residual Currents and Long-Term Transport; Springer: New York, NY, USA, 1990; pp. 210–222. [Google Scholar]
- Chatfield, C. The Analysis of Time Series: An Introduction, Sixth Edition; Taylor & Francis: New York, NY, USA, 2003; Available online: https://www.taylorfrancis.com/books/mono/10.4324/9780203491683/analysis-time-series-chris-chatfield (accessed on 10 December 2021).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Conditions | Test Case |
|---|---|
| (Lon, Lat) | (24.82, 40.41) |
| Number of particles | 1000 |
| Start time of simulation | 25 October 2020 |
| End time of simulation | 30 October 2020 |
| Duration | 5 days |
| Oil type | ODA 2019 |
| Wind data | NOAA GFS |
| Hydrodynamic data | CMEMS |
| Percentage (%)/Time (h) | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 90 | 100 | 110 | 120 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Evaporation (%) | 33.63 | 35.88 | 36.38 | 36.38 | 36.38 | 36.38 | 36.38 | 36.38 | 36.38 | 36.38 | 36.38 | 36.38 |
| Dispersion (%) | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.20 | 1.96 | 4.30 | 4.95 | 4.96 | 4.96 | 4.98 |
| Biodegradation (%) | 0.81 | 1.55 | 2.28 | 2.99 | 3.69 | 4.38 | 5.00 | 5.69 | 6.25 | 6.90 | 7.50 | 8.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Keramea, P.; Kokkos, N.; Gikas, G.D.; Sylaios, G. Operational Modeling of North Aegean Oil Spills Forced by Real-Time Met-Ocean Forecasts. J. Mar. Sci. Eng. 2022, 10, 411. https://doi.org/10.3390/jmse10030411
Keramea P, Kokkos N, Gikas GD, Sylaios G. Operational Modeling of North Aegean Oil Spills Forced by Real-Time Met-Ocean Forecasts. Journal of Marine Science and Engineering. 2022; 10(3):411. https://doi.org/10.3390/jmse10030411
Chicago/Turabian StyleKeramea, Panagiota, Nikolaos Kokkos, Georgios D. Gikas, and Georgios Sylaios. 2022. "Operational Modeling of North Aegean Oil Spills Forced by Real-Time Met-Ocean Forecasts" Journal of Marine Science and Engineering 10, no. 3: 411. https://doi.org/10.3390/jmse10030411
APA StyleKeramea, P., Kokkos, N., Gikas, G. D., & Sylaios, G. (2022). Operational Modeling of North Aegean Oil Spills Forced by Real-Time Met-Ocean Forecasts. Journal of Marine Science and Engineering, 10(3), 411. https://doi.org/10.3390/jmse10030411