
Working Performance of the Deep-Sea Valve-Controlled Hydraulic Cylinder System under Pressure-Dependent Viscosity Change and Hydrodynamic Effects



Abstract
:1. Introduction
2. Methodology
2.1. Hydraulic Oil
2.2. Oil Tank and Pressure Compensator
2.3. Pump and Relief Valve
2.4. Servo Valve
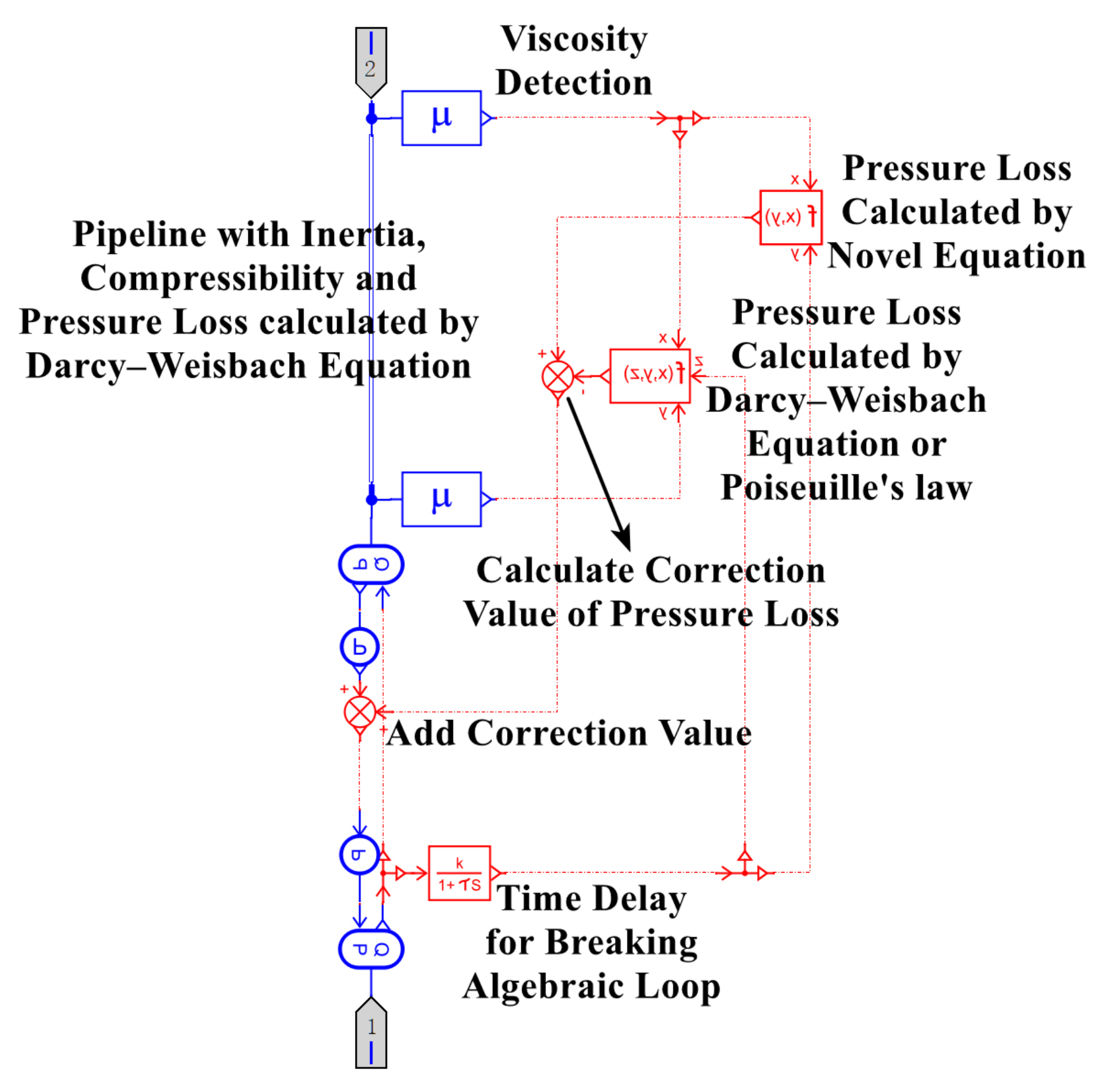
2.5. Slender Pipeline
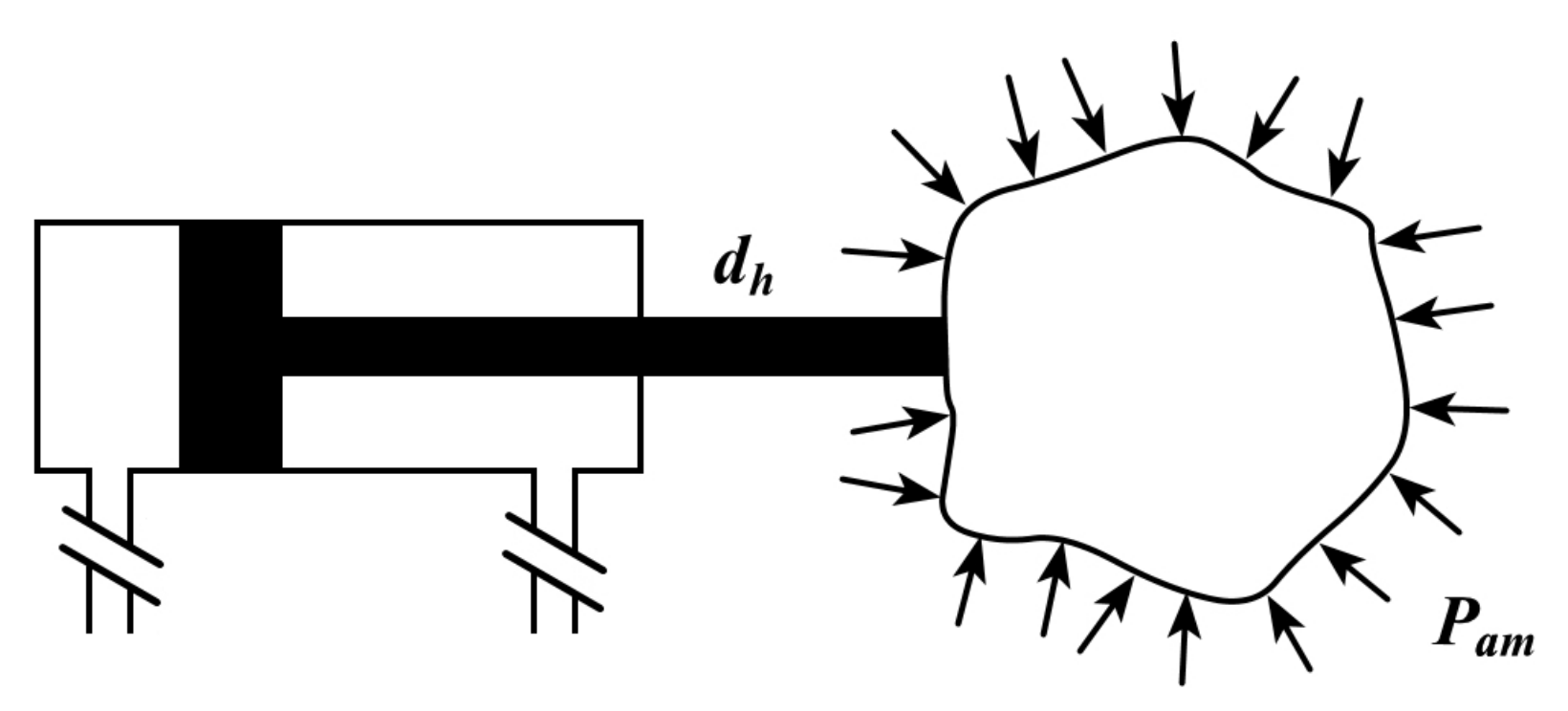
2.6. Hydraulic Cylinder
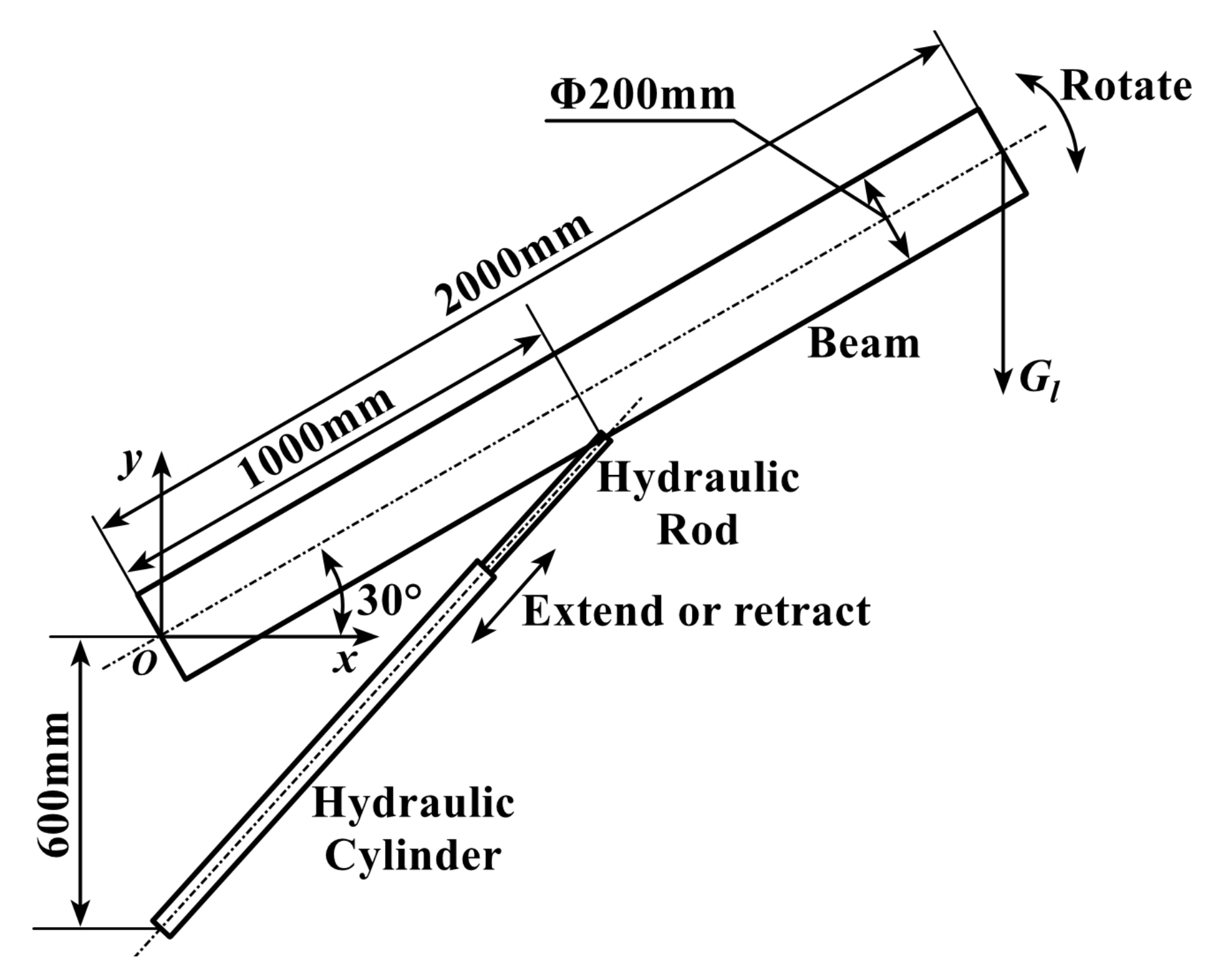
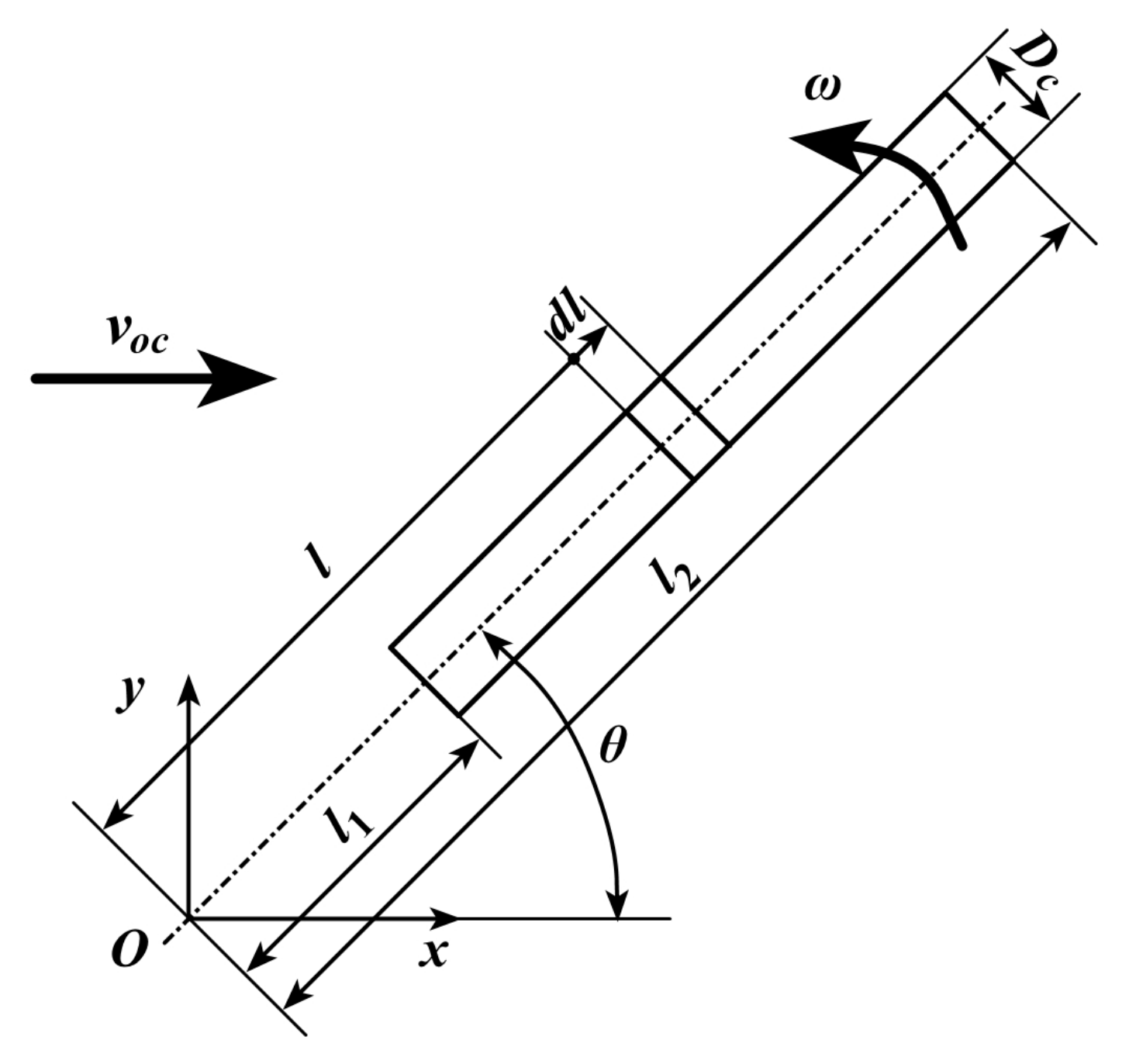
2.7. Mechanical System and Hydrodynamics
3. Model and Settings
4. Results and Discussions
4.1. Slender Pipeline
4.2. Working Performance of Deep-Sea VCHCS at Different Depths
4.3. Parameter Study
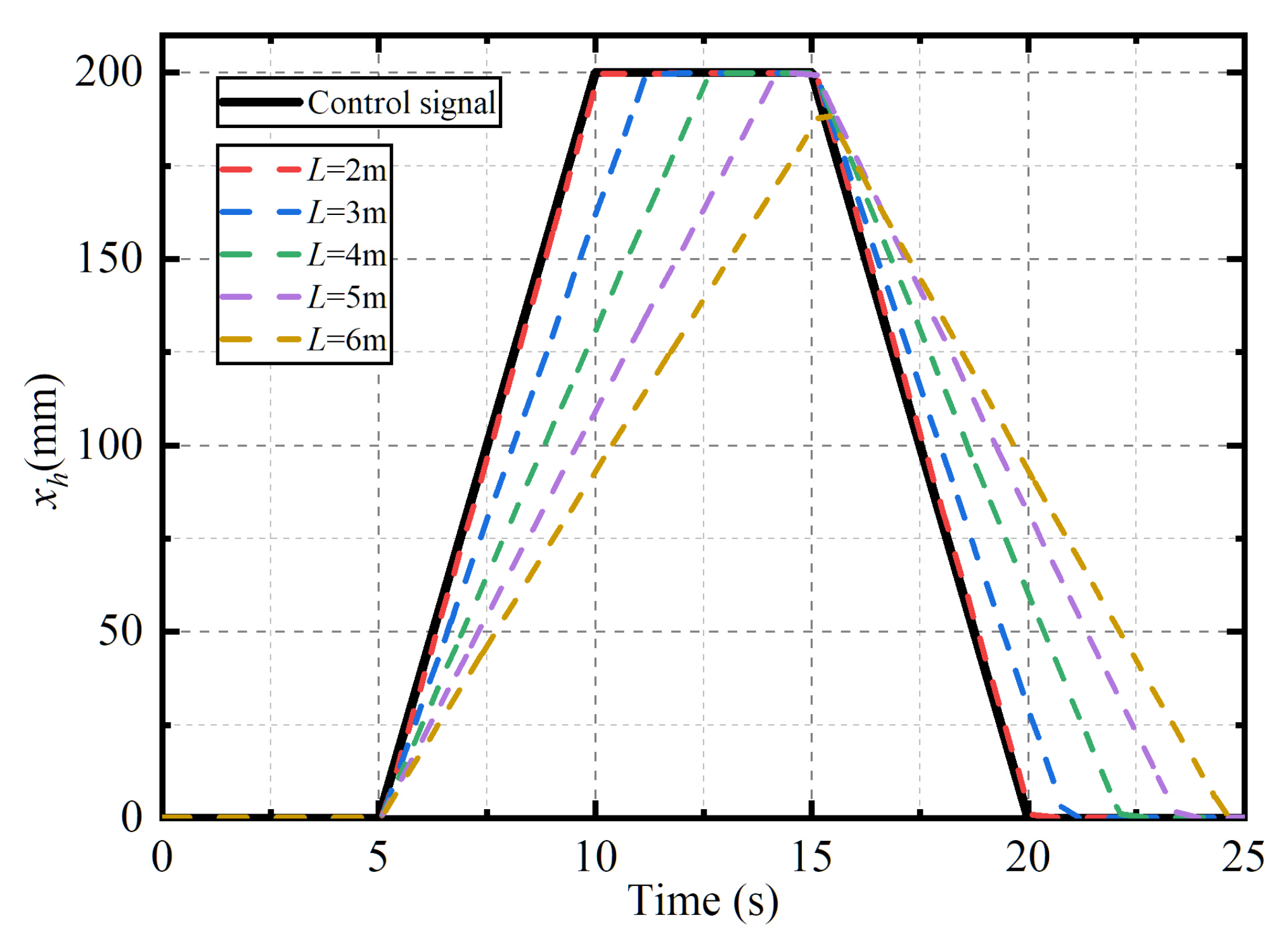
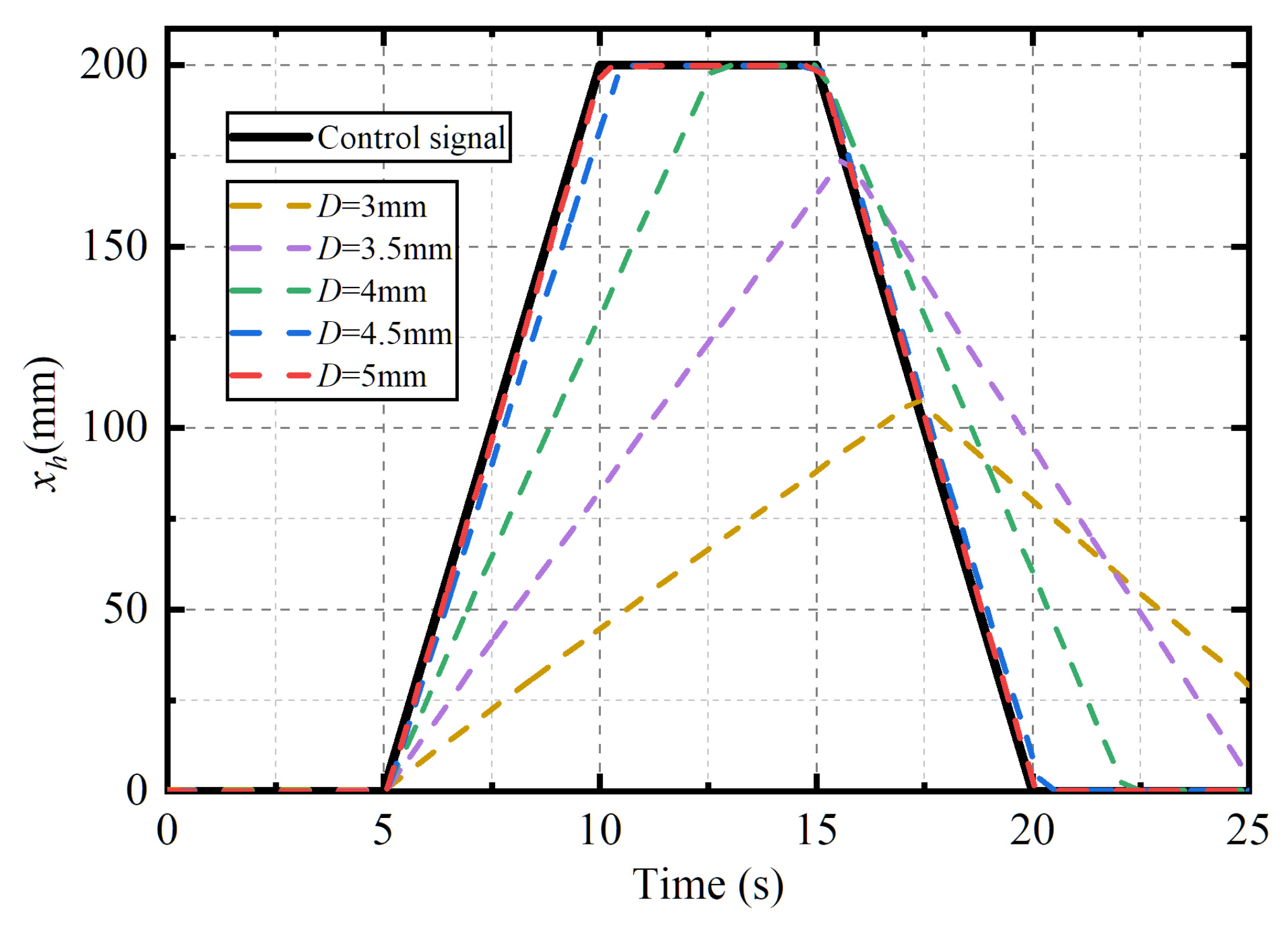
4.3.1. System Parameter of Deep-Sea VCHCS
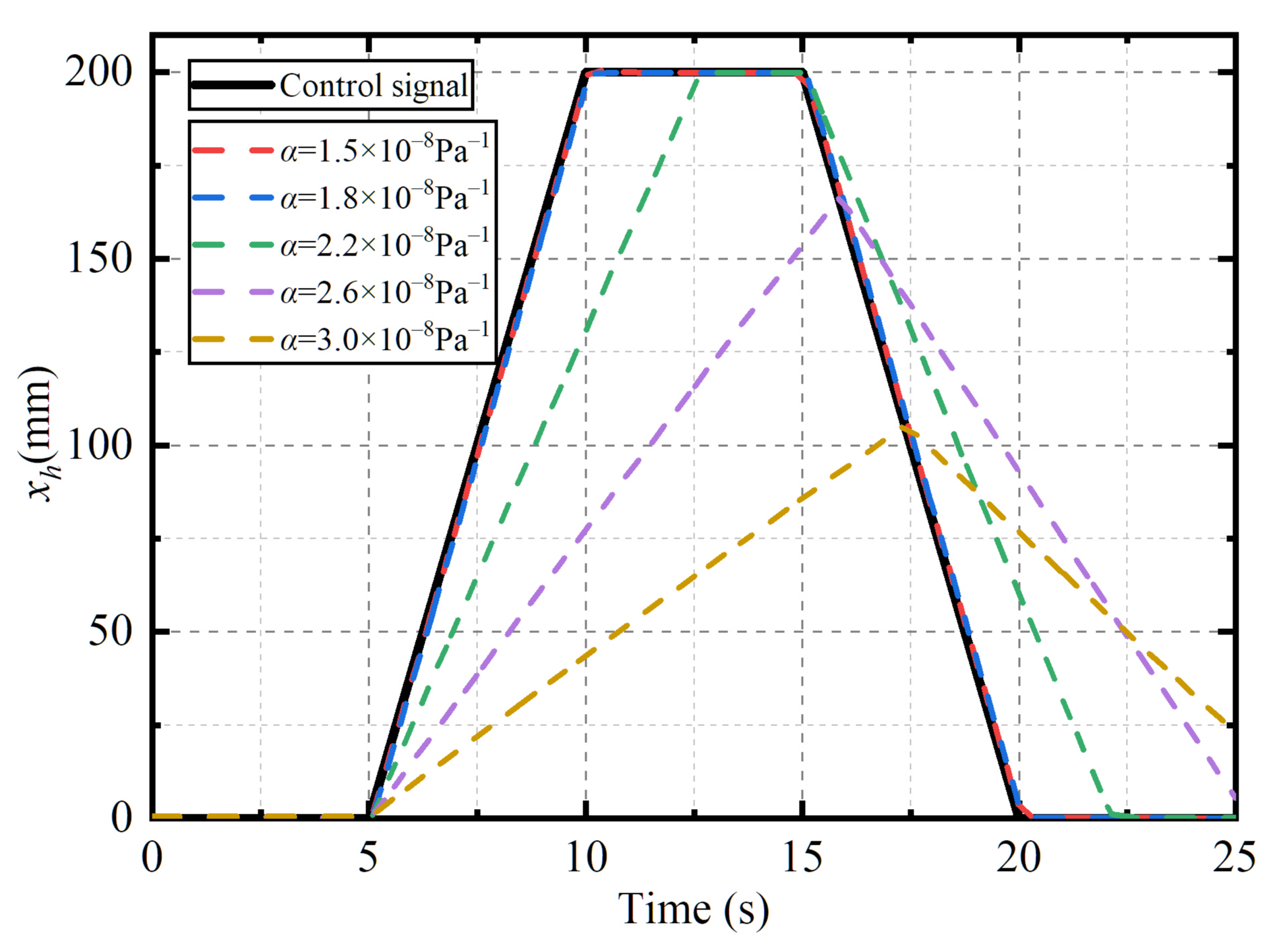
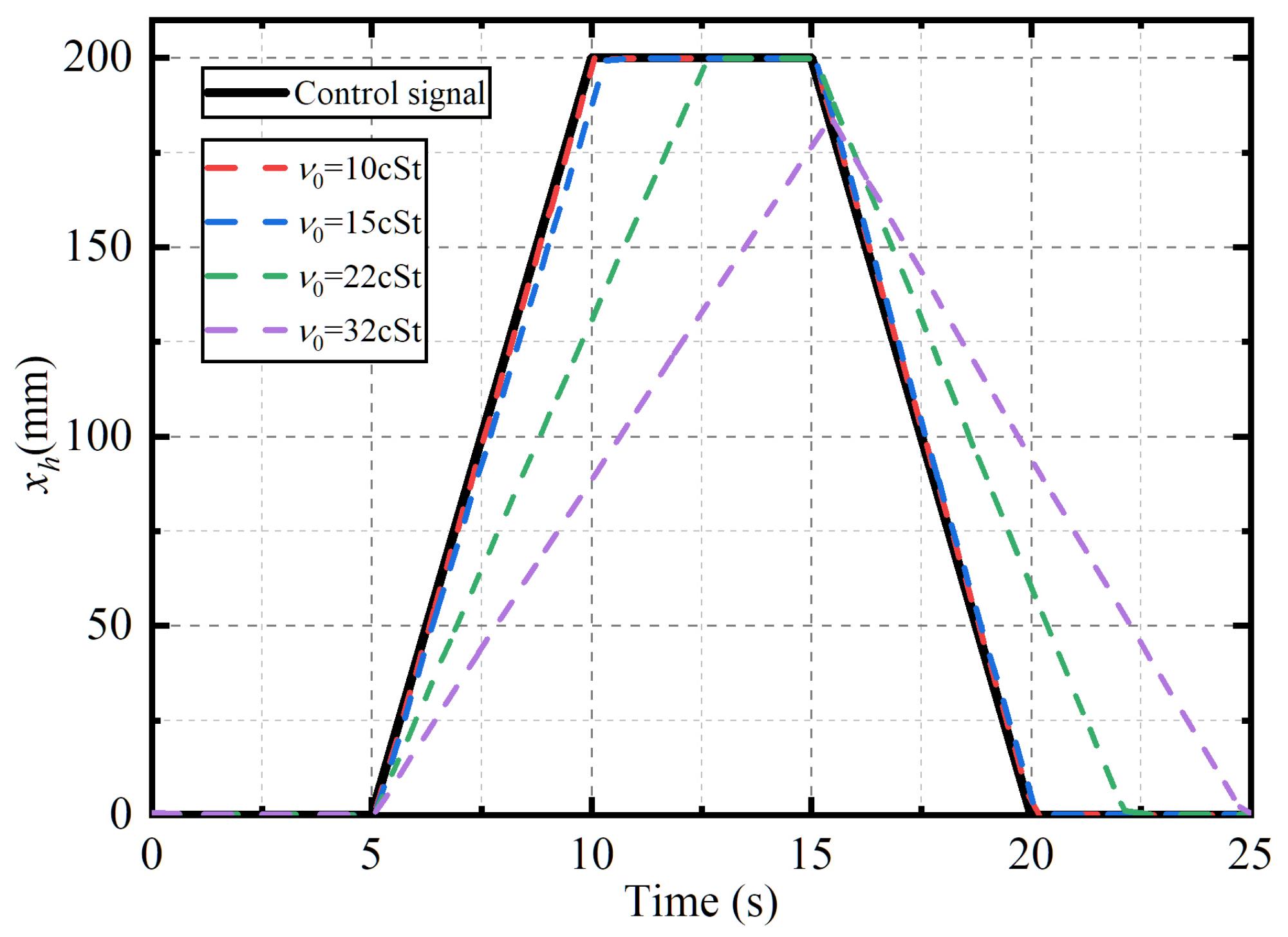
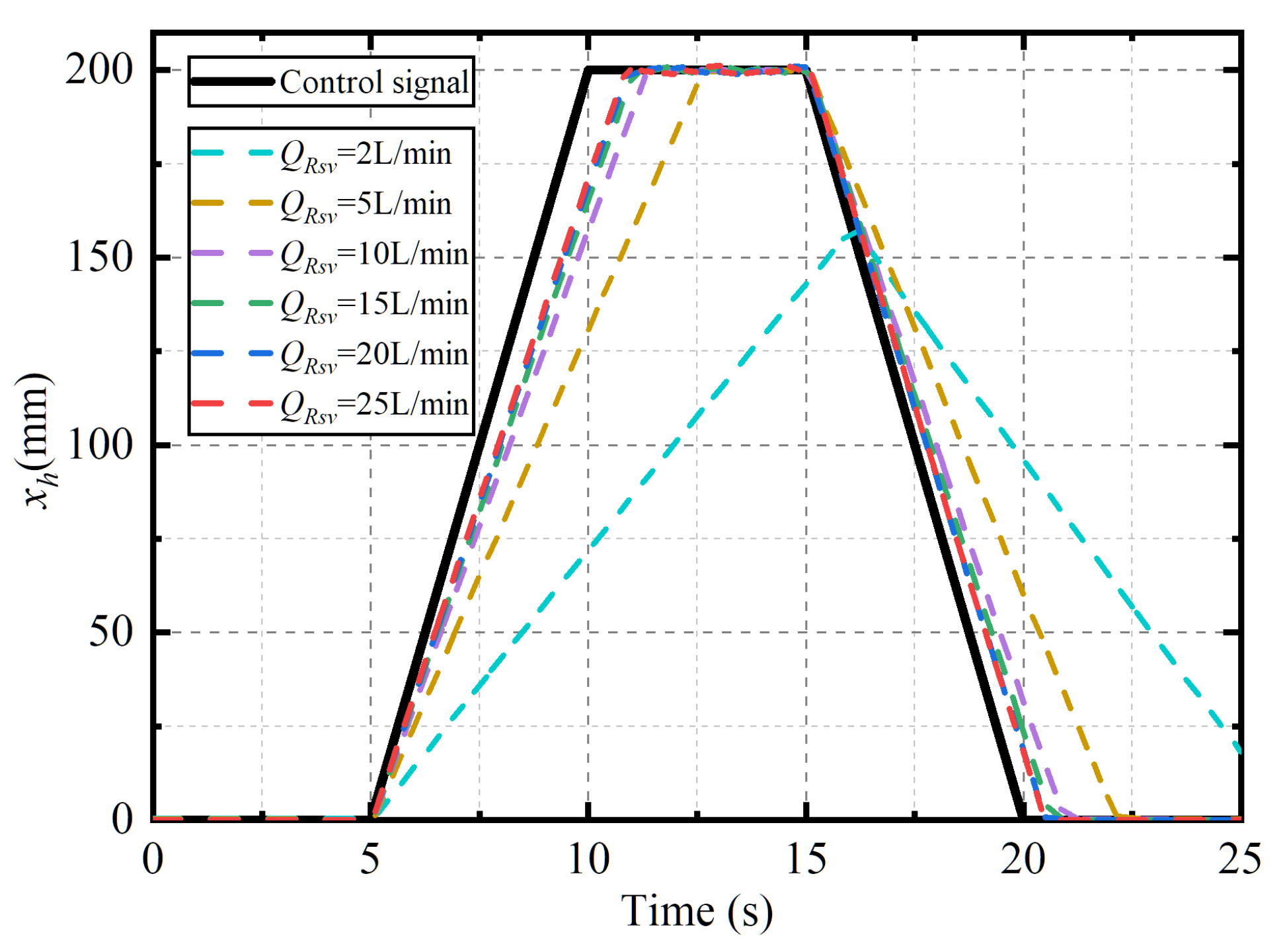
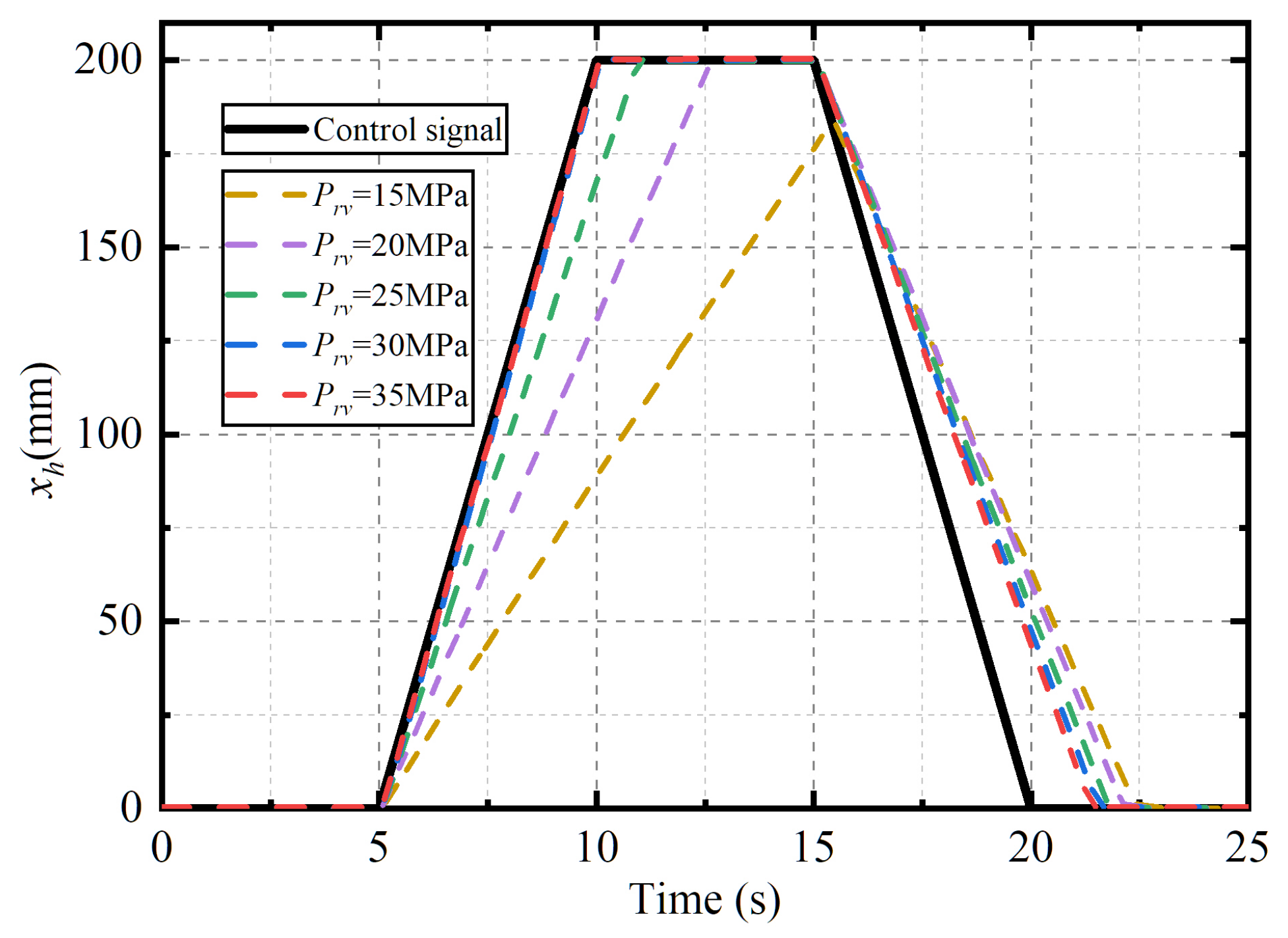
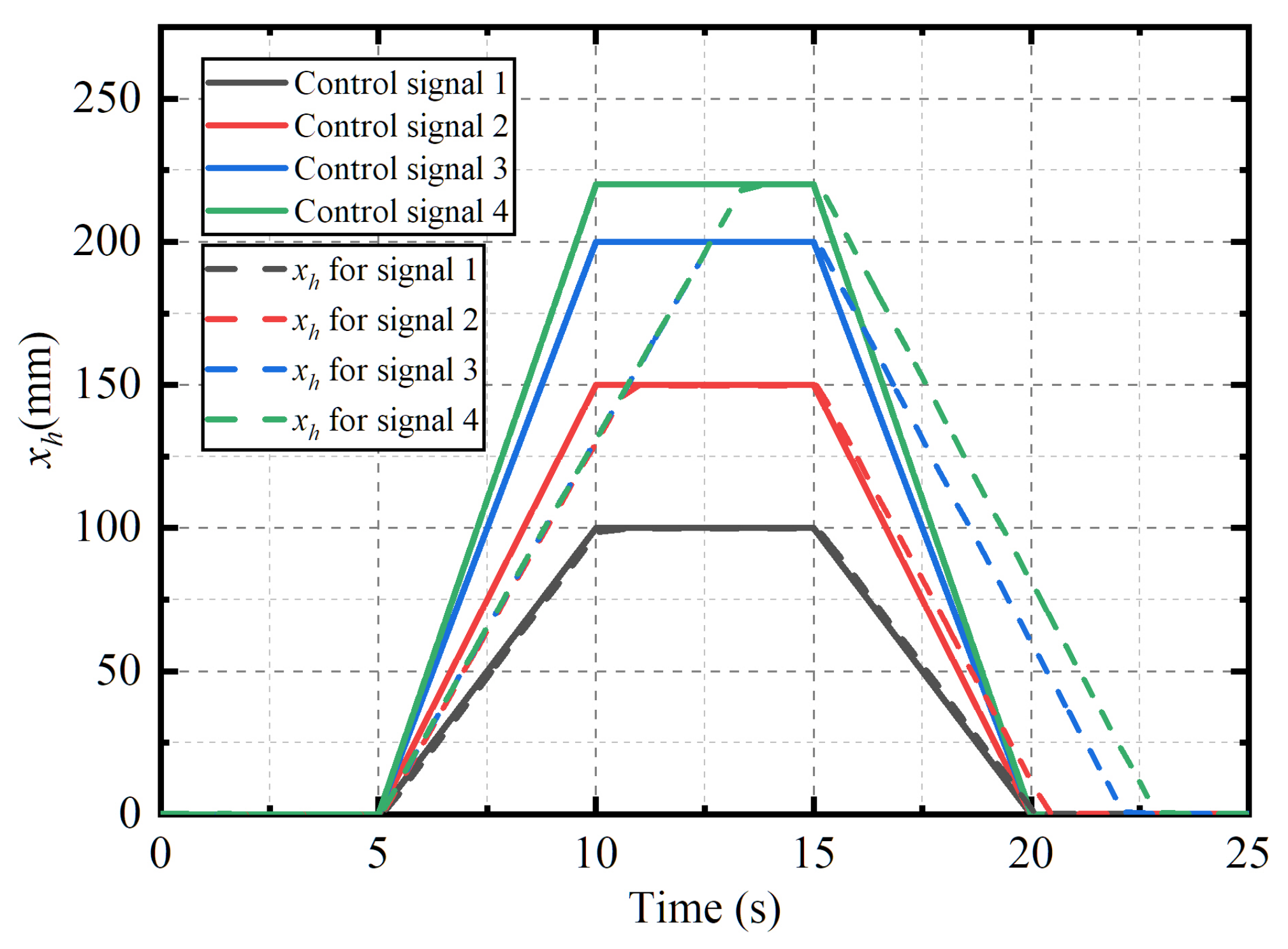
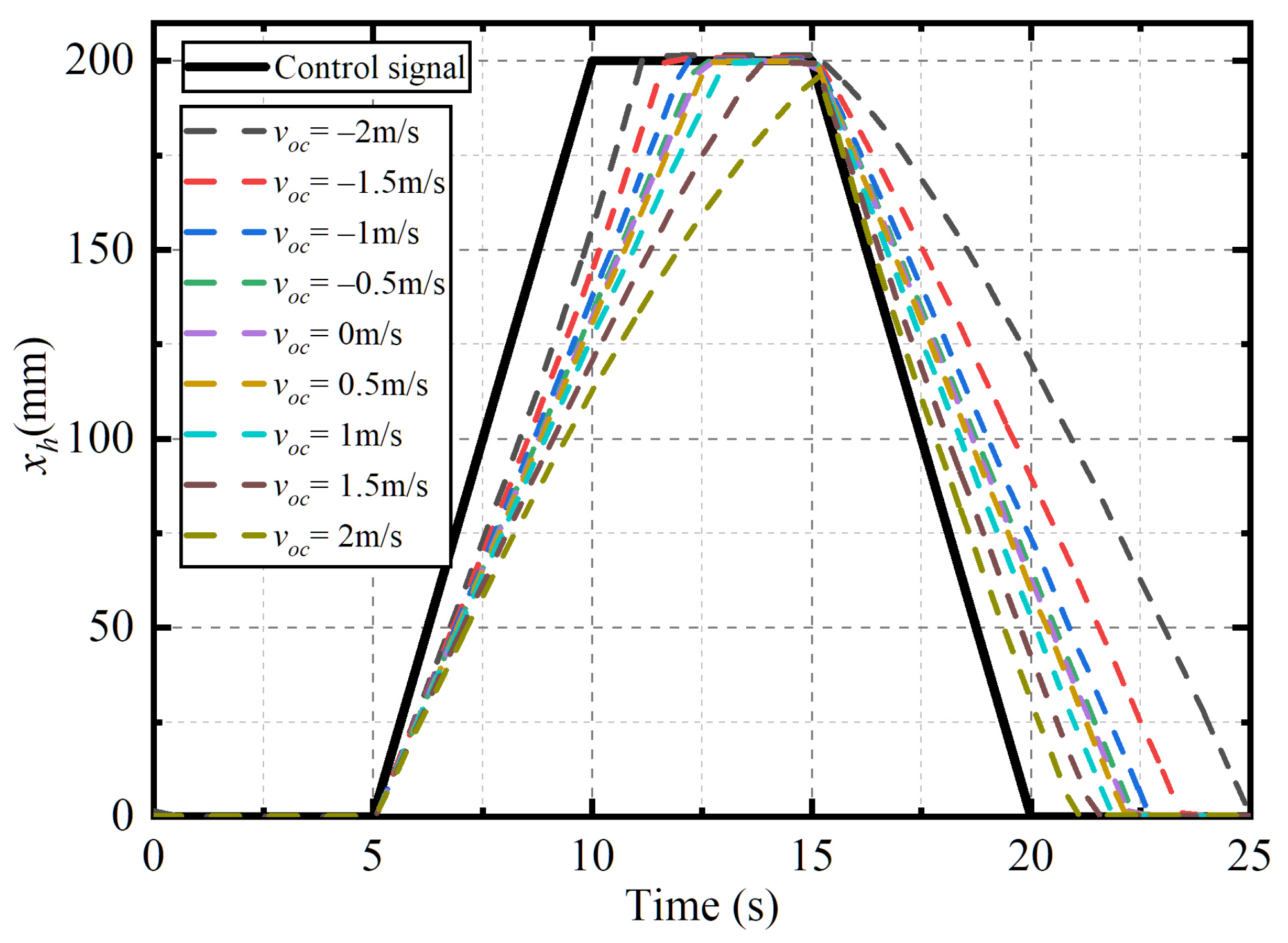
4.3.2. Input Parameter of Deep-Sea VCHCS
5. Conclusions
- 1.
- A detailed nonlinear mathematical model of the deep-sea VCHCS is described. In the model, the viscosity change of the hydraulic oil when flowing through the pipeline is considered based on the viscosity-pressure characteristics of the hydraulic oil. So is the viscosity increase caused by the pressure-compensator-introduced ambient pressure. With Morrison’s equation, the hydrodynamic effects are also included in the model.
- 2.
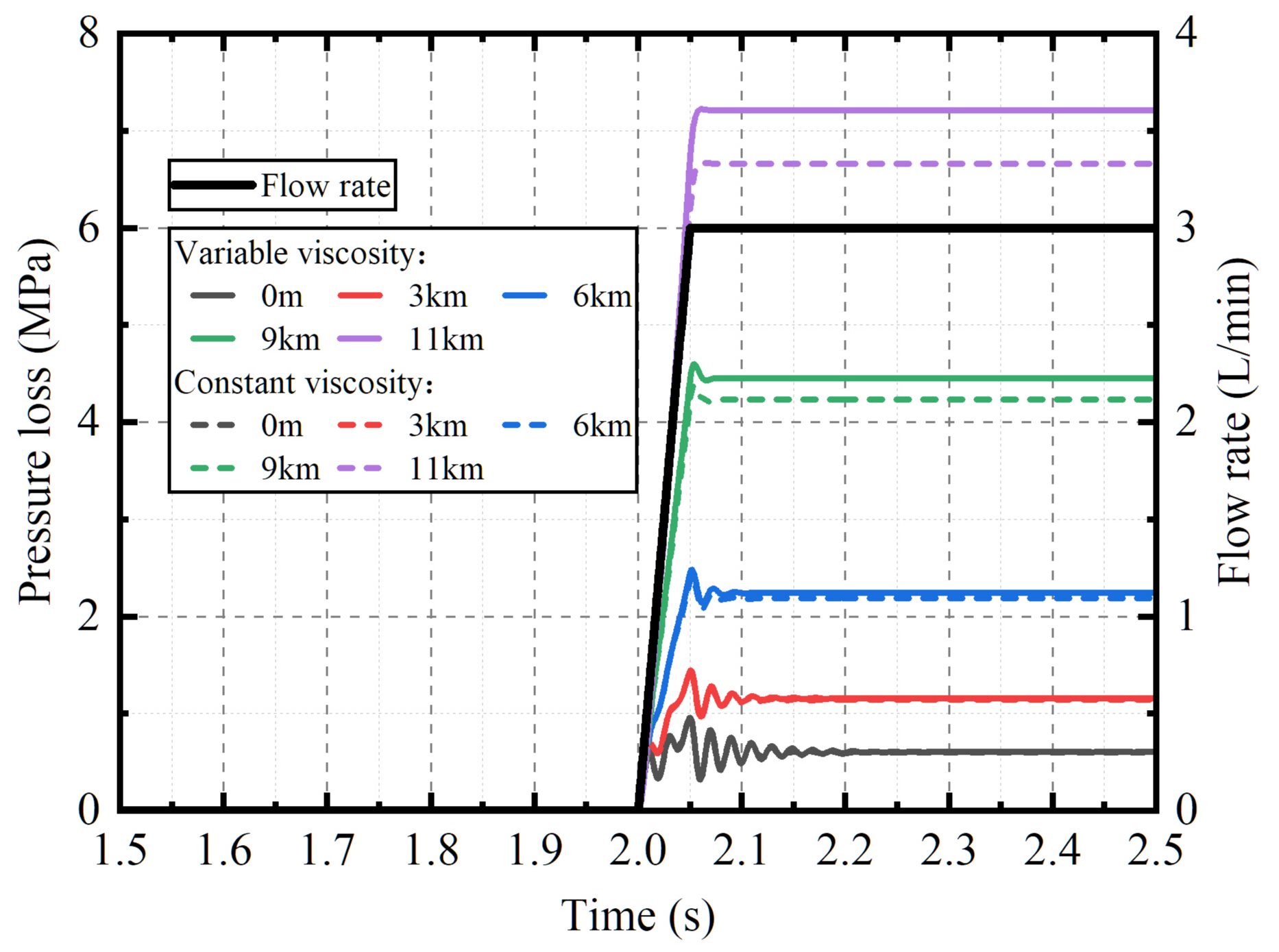
- Based on the nonlinear mathematical model, the corresponding numerical co-simulation model of the deep-sea VCHCS is established. The verification simulation of the slender pipeline model indicates that the viscosity change of the hydraulic oil when flowing through the pipeline has a significant impact when the depth is greater than or equal to 6 km. The errors between the simulated pressure loss of the slender pipeline and the theoretical one are all within ±5% under various conditions.
- 3.
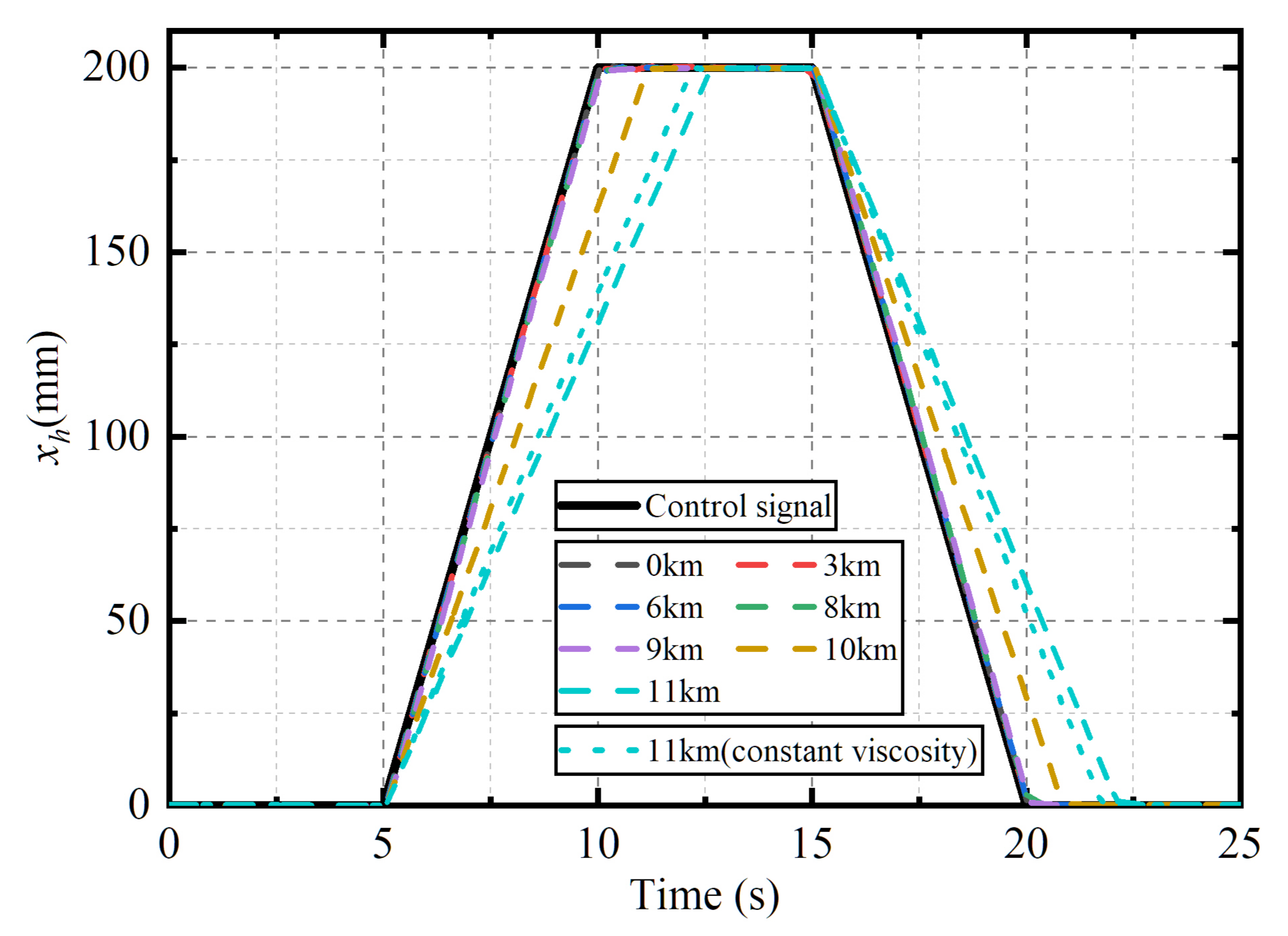
- Based on the numerical co-simulation model, the working performance of the deep-sea VCHCS at different depths in the sea is analyzed. When the depth is greater than or equal to 10 km, the output displacement of the hydraulic cylinder is delayed, and the deeper the depth is, the more serious the delay is. Compared with the control signal, the extension and retraction time of the hydraulic cylinder are delayed by 52.50% and 43.12%, respectively, when the depth is 11 km.
- 4.
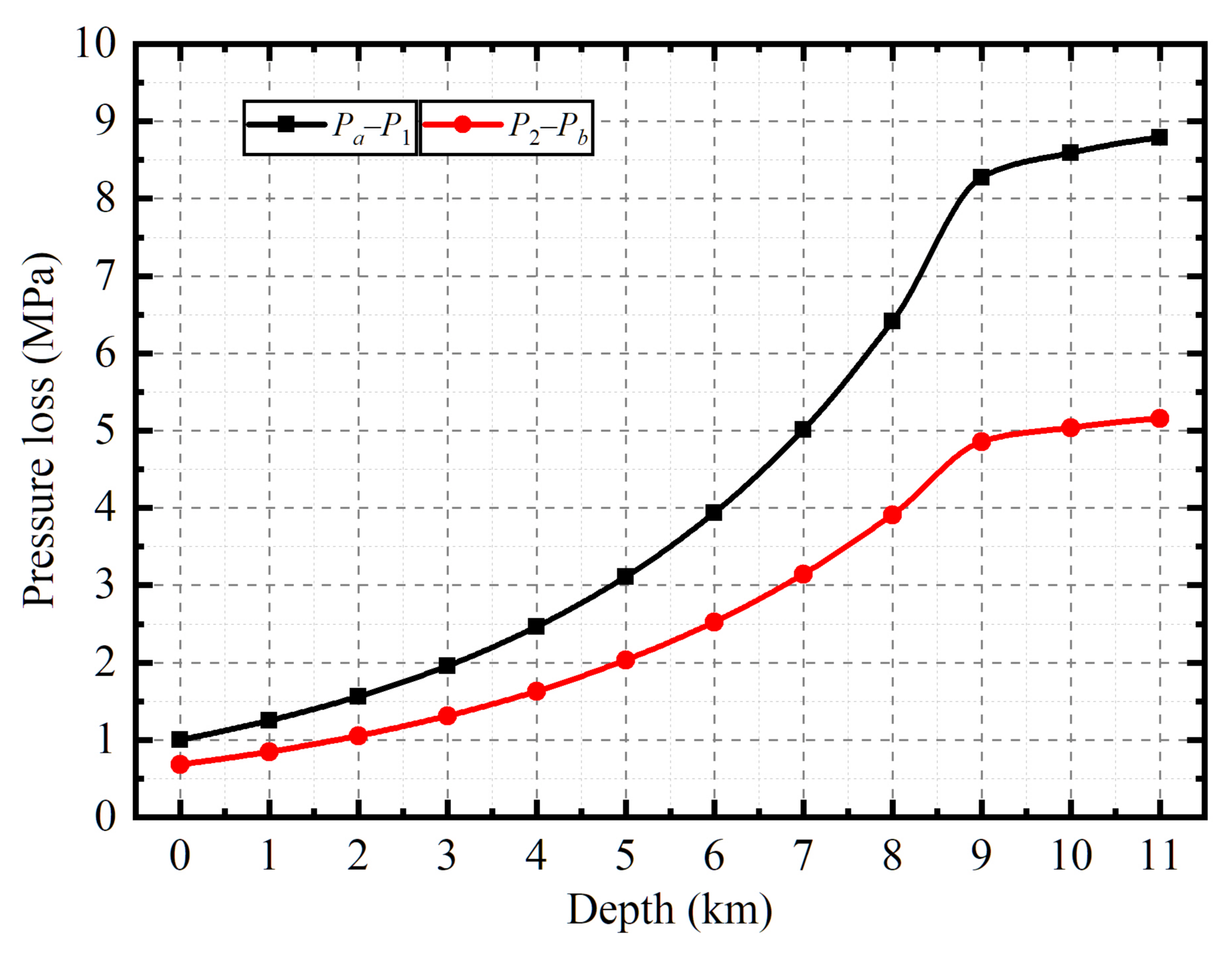
- The essential logic of the delay phenomenon is as follows. The pressure compensator introduces the ambient pressure into the deep-sea VCHCS, which makes the viscosity of the hydraulic oil increase greatly with the increase in depth, and so does the pressure loss in the slender pipeline. Therefore, the pressure difference of the servo valve decreases as the depth increases, and the servo valve needs to increase its flow area to maintain a flow rate that matches the control signal. When the servo valve is in the state with the maximum flow area, the flow rate matching the control signal can no longer be provided, and, finally, the displacement output is delayed.
- 5.
- Measures to reduce or even eliminate the displacement output delay when designing a deep-sea VCHCS include: selecting hydraulic oil with a small viscosity-pressure index and initial viscosity, reducing the length of the slender pipeline, increasing the inner diameter of the slender pipeline, selecting a servo valve with a large rated flow, increasing the cracking pressure of the relief valve. Control signals and loads also affect the displacement output delay. Among them, the movement against the ocean current of the mechanical system can make the deep-sea VCHCS more prone to delay due to the additional hydrodynamic load.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AUVs | Autonomous underwater vehicles |
| HOVs | Human occupied vehicles |
| ROVs | Remotely operated Vehicles |
| VCHCS | Valve-controlled hydraulic cylinder system |
Nomenclature
| Symbol | Defination | Symbol | Defination |
| Effective area of left chamber in hydraulic cylinder | Cracking pressure of relief valve | ||
| Effective area of right chamber in hydraulic cylinder | Pressure in oil tank, or pressure at port t of servo valve | ||
| Effective area of pressure compensator | Q | Flow rate of hydraulic oil | |
| Viscous friction coefficient of pressure compensator | Flow rate at port 1 of hydraulic cylinder | ||
| Viscous friction coefficient of hydraulic cylinder | Flow rate at port 2 of hydraulic cylinder | ||
| Drag coefficient | Flow rate at port a of servo valve | ||
| Inertia coefficient | Flow rate at port b of servo valve | ||
| Internal leakage coefficient of hydraulic cylinder | Flow rate into oil tank | ||
| D | Inner diameter of slender pipeline | Flow rate out oil tank | |
| Cylinder diameter | Flow rate at port p of servo valve | ||
| Piston diameter of hydraulic cylinder | Rated flow of servo valve | ||
| Rod diameter of hydraulic cylinder | Overflow flowing through relief valve | ||
| Projected area of micro-body in cylinder | Flow rate at port t of servo valve | ||
| Hydrodynamic force on micro-body | Re | Reynolds number | |
| Hydrodynamic force on micro-body caused by rotation | u | Input control signal | |
| Hydrodynamic force on micro-body caused by ocean current | Initial volume of left chamber in hydraulic cylinder | ||
| Length of micro-body in cylinder | Initial volume of right chamber in hydraulic cylinder | ||
| Hydrodynamic torque on micro-body caused by rotation | Volume of oil chamber in pressure compensator | ||
| Hydrodynamic torque on micro-body caused by ocean current | Volume of oil tank | ||
| Volume of micro-body in cylinder | v | Flow velocity in slender pipelline | |
| Additional load force caused by ambient pressure | Normal velocity of relative motion between micro-body and seawater | ||
| Axial component of force applied to hydraulic cylinder | Velocity of ocean current | ||
| Gravity of load mass | Displacement of hydraulic pump | ||
| Spring stiffness of pressure compensator | Displacement of piston assembly in pressure compensator | ||
| Flow gain coefficient of servo valve | Velocity of piston assembly in pressure compensator | ||
| Input gain of servo valve | Acceleration of piston assembly in pressure compensator | ||
| L | Length of slender pipeline | Displacement of hydraulic cylinder | |
| l | Distance from micro-body to origin | Velocity of hydraulic cylinder | |
| Distance from near end of cylinder to origin | Acceleration of hydraulic cylinder | ||
| Distance from far end of cylinder to origin | Displacement of the servo valve spool | ||
| Hydrodynamic torque on cylinder | Viscosity-pressure index of hydraulic oil | ||
| Hydrodynamic torque on cylinder caused by rotation | Bulk modulus of hydraulic oil | ||
| Hydrodynamic torque on cylinder caused by ocean current | Effective bulk modulus of slender pipeline | ||
| Mass of piston assembly in pressure compensator | Wall bulk modulus | ||
| Mass of piston in hydraulic cylinder | Pipeline pressure loss | ||
| n | Rotor speed of motor | Dynamic viscosity of hydraulic oil | |
| P | Pressure of hydraulic oil | Initial dynamic viscosity of hydraulic oil | |
| Pressure at port 1 of hydraulic cylinder | Inclination angle of cylinder | ||
| Pressure at port 2 of hydraulic cylinder | Friction coefficient of pipeline | ||
| Pressure at port a of servo valve | Kinematic viscosity of hydraulic oil | ||
| Ambient pressure | Initial kinematic viscosity of hydraulic oil | ||
| Pressure at port b of servo valve | Density of hydraulic oil | ||
| Inertia coefficient | Density of seawater | ||
| Pressure at port p of servo valve, or outlet pressure of pump | Angular velocity of cylinder |
Appendix A. Derivation Process
Appendix A.1. Hydrodynamic Load Caused by Rotation
Appendix A.2. Hydrodynamic Load Caused by Ocean Current
Appendix B. Parameter Settings

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object | Parameter | Symbol | Value |
|---|---|---|---|
| Hydraulic oil | Bulk modulus | 1400 MPa | |
| Density | 850 kg/m | ||
| Initial kinematic viscosity | 22 cSt | ||
| Viscosity-pressure index | Pa | ||
| Pressure compensator | Mass of piston assembly | 1 kg | |
| Spring stiffness | 3 N/mm | ||
| Spring pre-compression | - | 300 mm | |
| Viscous friction coefficient | 1000 N/(m/s) | ||
| Oil chamber length | - | 250 mm | |
| Piston diameter | - | 250 mm | |
| Rod diameter | - | 0 mm | |
| Oil tank | Volume | 100 L | |
| Pump | Displacement | 6 mL/rev | |
| Motor | Rotate speed | n | 1450 rev/min |
| Relief valve | Cracking pressure | 20 MPa | |
| Servo valve | Rated flow | 5 L/min | |
| Corresponding pressure drop | - | 3.5 MPa | |
| Rated current | - | 10 mA | |
| Slender pipeline | Length | L | 4 m |
| Inner diameter | D | 4 mm | |
| Relative roughness | - | 0 | |
| Evaluation of wall bulk modulus | - | Infinitely stiff wall | |
| Time constant of first-order lag | - | s | |
| Hydraulic cylinder | Viscous friction coefficient | 1000 N/(m/s) | |
| Piston diameter | 45 mm | ||
| Rod diameter | 25 mm | ||
| Mass of piston | 5 kg | ||
| Internal leakage coefficient | m/s/Pa | ||
| Displacement sensor | Gain | - | 1000 m |
| PID controller | Proportional gain | - | 2.5 |
| Integral gain | - | 0.001 | |
| Derivative gain | - | 0.001 | |
| Mechanical system | Gravity of load mass | 800 N | |
| Mass of beam | - | 50 kg | |
| Hydrodynamics | Drag coefficient | 1.2 | |
| Inertia coefficient | 2 | ||
| Velocity of ocean current | 0.5 m/s |
References
- Sivčev, S.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Underwater manipulators: A review. Ocean. Eng. 2018, 163, 431–450. [Google Scholar] [CrossRef]
- Sartore, C.; Simetti, E.; Wanderlingh, F.; Casalino, G. Autonomous Deep Sea Mining Exploration: The EU ROBUST Project Control Framework. In Proceedings of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Lynch, B.; Ellery, A. Efficient Control of an AUV-Manipulator System: An Application for the Exploration of Europa. IEEE J. Ocean. Eng. 2014, 39, 552–570. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, Q.; Zhang, Q.; Zhang, Y.; Huo, L.; Wang, X. Construction and Research of an Underwater Autonomous Dual Manipulator Platform. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Sivčev, S.; Rossi, M.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Collision Detection for Underwater ROV Manipulator Systems. Sensors 2018, 18, 1117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fan, Y.; Zhang, Q.; Wang, H.; Bai, Y.; Zhang, Y.; Cui, S. Design and Experiments of a 11000m 7-Function Electric Manipulator System. In Proceedings of the 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Bai, Y.; Zhang, Q.; Tian, Q.; Yan, S.; Tang, Y.; Zhang, A. Performance and experiment of deep-sea master-slave servo electric manipulator. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Q.; Zhang, A.; Cui, S.; Du, L.; Huo, L. Experiment research on control performance for the actuators of a deep-sea hydraulic manipulator. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Q.; Tian, Q.; Huo, L.; Feng, X. Fuzzy Adaptive Impedance Control for Deep-Sea Hydraulic Manipulator Grasping Under Uncertainties. In Proceedings of the Global Oceans 2020: Singapore–U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Y.; Wu, D.; Li, D.; Deng, Y. Applications and Research Progress of Hydraulic Technology in Deep Sea. J. Mech. Eng. 2018, 54, 14–23. [Google Scholar] [CrossRef]
- Liu, Y.; Ren, X.; Wu, D.; Li, D.; Li, X. Simulation and analysis of a seawater hydraulic relief valve in deep-sea environment. Ocean. Eng. 2016, 125, 182–190. [Google Scholar] [CrossRef]
- Liu, Y.; Deng, Y.; Fang, M.; Li, D.; Wu, D. Research on the torque characteristics of a seawater hydraulic axial piston motor in deep-sea environment. Ocean. Eng. 2017, 146, 411–423. [Google Scholar] [CrossRef]
- Li, L.; Wu, J.B. Deformation and leakage mechanisms at hydraulic clearance fit in deep-sea extreme environment. Phys. Fluids 2020, 32, 067115. [Google Scholar] [CrossRef]
- Wang, F.; Chen, Y. Dynamic characteristics of pressure compensator in underwater hydraulic system. IEEE-ASME Trans. Mechatronics 2014, 19, 777–787. [Google Scholar] [CrossRef]
- Wu, J.B.; Li, L.; Wei, W. Research on dynamic characteristics of pressure compensator for deep-sea hydraulic system. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2022, 256, 19–33. [Google Scholar] [CrossRef]
- Wang, S.K.; Wang, J.Z.; Shi, D.W. CMAC-based compound control of hydraulically driven 6-DOF parallel manipulator. J. Mech. Sci. Technol. 2011, 25, 1595–1602. [Google Scholar] [CrossRef]
- Han, H.Y.; Wang, J.; Huang, Q.X. Analysis of unsymmetrical valve controlling unsymmetrical cylinder stability in hydraulic leveler. Nonlinear Dyn. 2012, 70, 1199–1203. [Google Scholar] [CrossRef]
- Ba, K.X.; Yu, B.; Kong, X.D.; Zhao, H.L.; Zhao, J.S.; Zhu, Q.X.; Li, C.H. The dynamic compliance and its compensation control research of the highly integrated valve-controlled cylinder position control system. Int. J. Control Autom. Syst. 2017, 15, 1814–1825. [Google Scholar] [CrossRef]
- Ye, Y.; Yin, C.B.; Gong, Y.; Zhou, J.J. Position control of nonlinear hydraulic system using an improved PSO based PID controller. Mech. Syst. Signal Process. 2017, 83, 241–259. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W.; Sun, W. Precision Motion Control for Electro-Hydraulic Servo Systems With Noise Alleviation: A Desired Compensation Adaptive Approach. IEEE/ASME Trans. Mechatronics 2017, 22, 1859–1868. [Google Scholar] [CrossRef]
- Shang, Y.; Liu, X.; Jiao, Z.; Wu, S. An integrated load sensing valve-controlled actuator based on power-by-wire for aircraft structural test. Aerosp. Sci. Technol. 2018, 77, 117–128. [Google Scholar] [CrossRef]
- Guo, W.; Zhao, Y.; Li, R.; Ding, H.; Zhang, J. Active Disturbance Rejection Control of Valve-Controlled Cylinder Servo Systems Based on MATLAB-AMESim Cosimulation. Complexity 2020, 2020. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Tomizuka, M. Nonlinear Control with High-Gain Extended State Observer for Position Tracking of Electro-Hydraulic Systems. IEEE/ASME Trans. Mechatronics 2020, 25, 2610–2621. [Google Scholar] [CrossRef]
- Wang, C.; Ji, X.; Zhang, Z.; Zhao, B.; Quan, L.; Plummer, A. Tracking differentiator based back-stepping control for valve-controlled hydraulic actuator system. ISA Trans. 2022, 119, 208–220. [Google Scholar] [CrossRef]
- Tongli, C. Hydraulic Control Systems; Tsinghua University Press: Beijing, China, 2014. (In Chinese) [Google Scholar]
- Barus, C. Isothermals, isopiestics, and isometrics relative to viscosity. Am. J. Sci. 1893, 45, 87–96. [Google Scholar] [CrossRef]
- Tian, Q.; Zhang, Q.; Chen, Y.; Huo, L.; Li, S.; Wang, C.; Bai, Y.; Du, L. Influence of Ambient Pressure on Performance of a Deep-sea Hydraulic Manipulator. In Proceedings of the OCEANS 2019, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Wu, J.B.; Li, L. Pipeline Pressure Loss in Deep-Sea Hydraulic Systems Considering Pressure-Dependent Viscosity Change of Hydraulic Oil. J. Mar. Sci. Eng. 2021, 9, 1142. [Google Scholar] [CrossRef]
- Yuguang, Z.; Fan, Y. Dynamic modeling and adaptive fuzzy sliding mode control for multi-link underwater manipulators. Ocean. Eng. 2019, 187, 106202. [Google Scholar] [CrossRef]
- Hai, H.; Zexing, Z.; Jiyong, L.; Qirong, T.; Wanli, Z.; Wang, G. Investigation on the mechanical design and manipulation hydrodynamics for a small sized, single body and streamlined I-AUV. Ocean. Eng. 2019, 186, 106106. [Google Scholar] [CrossRef]
- Idelchik, I.E. Handbook of Hydraulic Resistance, 4th ed.; Begell House, Inc.: New York, NY, USA, 2007. [Google Scholar]
- Sumer, B.M.; Fredse, J. Hydrodynamics Around Cylindrical Structures; World Scientific Publishing Co. Re. Ltd.: Singapore, 1997. [Google Scholar]
- En, M.; Sumin, L. Hydraulic and Fluid Power Transmission; Tsinghua University Press: Beijing, China, 2015. (In Chinese) [Google Scholar]
- Andrea, V.; Germano, F. Hydraulic Fluid Power: Fundamentals, Applications, and Circuit Design; John Wiley & Sons, Inc: Hoboken, NJ, USA, 2021. [Google Scholar]
- Bosch Rexroth. 4-Way Directional Servo-Valve, Type: 4WS.2E. Available online: https://www.boschrexroth.com.cn/zh/cn/products_1/product_groups_2/industrial_hydraulics/proportional-high-response-and-servo-valves/directional-servo-valves/4ws-e-2em-6 (accessed on 28 February 2022).
- Siemens Industry Software NV. Simcenter Amesim Help, Siemens Industry Software: Plano, TX, USA, 2018.





| No. | Viscosity-Pressure Index | Initial Kinematic Viscosity | Pipeline Length | Pipeline Inner Diameter | Depth | Flow Rate | Simulated Pressure Loss | Theoretical Pressure Loss | Error |
|---|---|---|---|---|---|---|---|---|---|
| (Pa) | (cSt) | (m) | (mm) | (km) | (L/min) | (MPa) | (MPa) | (%) | |
| 1 | 22 | 4 | 4 | 6 | 3 | 2.2421 | 2.2847 | −1.86 | |
| 2 | 22 | 4 | 4 | 6 | 3 | 1.4333 | 1.4804 | −3.18 | |
| 3 | 22 | 4 | 4 | 6 | 3 | 2.5693 | 2.3281 | 4.53 | |
| 4 | 10 | 4 | 4 | 6 | 3 | 0.9920 | 1.0243 | −3.15 | |
| 5 | 32 | 4 | 4 | 6 | 3 | 3.3365 | 3.3624 | −0.77 | |
| 6 | 22 | 3 | 4 | 6 | 3 | 1.6608 | 1.7027 | −2.46 | |
| 7 | 22 | 5 | 4 | 6 | 3 | 2.8378 | 2.8743 | −1.27 | |
| 8 | 22 | 4 | 3 | 6 | 3 | 7.9246 | 7.6517 | 3.57 | |
| 9 | 22 | 4 | 5 | 6 | 3 | 0.8920 | 0.9920 | −3.25 | |
| 10 | 22 | 4 | 4 | 0 | 3 | 0.6043 | 0.6005 | 0.63 | |
| 11 | 22 | 4 | 4 | 11 | 3 | 7.2067 | 7.2413 | −0.48 | |
| 12 | 22 | 4 | 4 | 6 | 2 | 1.4702 | 1.5103 | −2.66 | |
| 13 | 22 | 4 | 4 | 6 | 4 | 3.0397 | 3.0725 | −1.07 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.-B.; Li, L.; Zou, X.-L.; Wang, P.-J.; Wei, W. Working Performance of the Deep-Sea Valve-Controlled Hydraulic Cylinder System under Pressure-Dependent Viscosity Change and Hydrodynamic Effects. J. Mar. Sci. Eng. 2022, 10, 362. https://doi.org/10.3390/jmse10030362
Wu J-B, Li L, Zou X-L, Wang P-J, Wei W. Working Performance of the Deep-Sea Valve-Controlled Hydraulic Cylinder System under Pressure-Dependent Viscosity Change and Hydrodynamic Effects. Journal of Marine Science and Engineering. 2022; 10(3):362. https://doi.org/10.3390/jmse10030362
Chicago/Turabian StyleWu, Jia-Bin, Li Li, Xing-Long Zou, Pin-Jian Wang, and Wei Wei. 2022. "Working Performance of the Deep-Sea Valve-Controlled Hydraulic Cylinder System under Pressure-Dependent Viscosity Change and Hydrodynamic Effects" Journal of Marine Science and Engineering 10, no. 3: 362. https://doi.org/10.3390/jmse10030362
APA StyleWu, J.-B., Li, L., Zou, X.-L., Wang, P.-J., & Wei, W. (2022). Working Performance of the Deep-Sea Valve-Controlled Hydraulic Cylinder System under Pressure-Dependent Viscosity Change and Hydrodynamic Effects. Journal of Marine Science and Engineering, 10(3), 362. https://doi.org/10.3390/jmse10030362