
Management and Sustainable Exploitation of Marine Environments through Smart Monitoring and Automation

 ,
,  ,
,  ,
,  , ,
, ,  and
and 
Abstract
:1. Current Policies for Environmental Monitoring and Conservation
2. Sensing and e-Noses
- Self-standing devices: equipment should be designed against possible acts of vandalism, which are more frequent than commonly expected;
- Hardware robustness: all equipment needs strong resistance due to currents, waves, tides, typhoons, and other physical impacts producing frequent aggressions to weak structures;
- Salinity: sensor and actuator nodes need to have very high levels of robustness against corrosion and be adapted to a high electrical resistance to the medium;
- Stability of communications: specific techniques must be adapted to bad weather conditions (that can affect the stability of radio signals) and to the oscillation of the antennas due to waves and storms, which can cause unstable communications [14];
- Costs: energy storage and collection (eventually using energy accumulators) must be considered due to long communication distances and the need for probe functioning, data storage and transmission, and ultimately motion structures;
- Distance between receiving stations and buoy or mooring devices: sensor coverage needs to be carefully calculated because of the large areas often covered by a monitoring network [15];
- Stationary position: in the case of both fixed buoys and autonomous vehicles, the position of the sensor nodes should be assured, and its location should be assessed with high reliability because of the continuous movement in the fluid environment;
- The optical signal response is too low when compared with other targets and that one may have under certain circumstances of vegetation, soils, and also strong geometric effects (e.g., sun-view angle effects from optical data).
3. Autonomous Vehicles and Monitoring Platforms
4. Experimental Data
5. Autonomous Monitoring Networks
6. Marine Permanent Infrastructures
7. IoT Hardware Modules
8. The IoT Applied to Marine Environmental Monitoring
9. Monitoring Applied to Aquaculture and Fishery Productions
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chuaysi, B.; Kiattisin, S. Fishing Vessels Behavior Identification for Combating IUU Fishing: Enable Traceability at Sea. Wirel. Pers. Commun. 2020, 115, 2971–2993. [Google Scholar] [CrossRef]
- Al-Absi, M.A.; Kamolov, A.; Al-Absi, A.A.; Sain, M.; Lee, H.J. IoT Technology with Marine Environment Protection and Monitoring. In International Conference on Smart Computing and Cyber Security; Springer: Singapore, 2021; pp. 81–89. [Google Scholar]
- DONET System Concept. Available online: https://www.jamstec.go.jp/donet/e/ (accessed on 16 January 2022).
- González, F.I.; Milburn, H.B.; Bernard, E.N.; Newman, J. Deep-Ocean Assessment and Reporting of Tsunamis (DART®): Brief Overview and Status Report. In Proceedings of the International Workshop on Tsunami Disaster Mitigation, Tokyo, Japan, 19 January 1998; pp. 19–22. [Google Scholar]
- Meinig, C.; Stalin, S.; Stalin, S.E.; Nakamura, A.I.; Milburn, H.B. Real-Time Deep-Ocean Tsunami Measuring, Monitoring, and Reporting System: The NOAA DART II Description and Disclosure; NOAA: Washington, DC, USA, 2005. [Google Scholar]
- Tonacci, A.; Lippa, M.A.; Pioggia, G.; Domenici, C.; Lacava, G.; Lupi, L.; Gualdesi, L.; Cocco, M. A Smart Multimodal Innovative Model For Marine Environmental Monitoring. In Proceedings of the 29th European Conference on Modelling and Simulation ECMS, Albena, Bulgaria, 26–29 May 2015; pp. 455–461. [Google Scholar]
- Milburn, H.B.; Nakamura, A.I.; Gonzalez, F.I. Real-Time Tsunami Reporting from the Deep Ocean. In Proceedings of the Oceans Conference Record (IEEE), Lauderdale, FL, USA, 3–26 September 1996; Volume 1, pp. 390–394. [Google Scholar]
- Kim, S.; Lee, W.; Kwon, H.; Kim, J. Design and Preliminary Implementation of an IoT-Based System for Ocean Observation Buoys. In Proceedings of the ITC-CSCC, Okinawa, Japan, 10 July 2016; pp. 865–867. [Google Scholar]
- Kim, S.M.; Lee, U.H.; Kwon, H.J.; Kim, J.Y.; Kim, J. Development of an IoT Platform for Ocean Observation Buoys. IEIE Trans. Smart Process. Comput. 2017, 6, 109–116. [Google Scholar] [CrossRef]
- Boonma, P.; Suzuki, J. An Adaptive, Scalable and Self-Healing Sensor Network Architecture for Autonomous Coastal Environmental Monitoring. In Proceedings of the IEEE Conference on Technologies for Homeland Security, Woburn, MA, USA, 16–17 May 2007; p. 18. [Google Scholar]
- Albaladejo, C.; Sánchez, P.; Iborra, A.; Soto, F.; López, J.A.; Torres, R. Wireless Sensor Networks for Oceanographic Monitoring: A Systematic Review. Sensors 2010, 10, 6948–6968. [Google Scholar] [CrossRef] [PubMed]
- Hadim, S.; Mohamed, N. Middleware: Middleware Challenges and Approaches for Wireless Sensor Networks. IEEE Distrib. Syst. Online 2006, 7, 1–23. [Google Scholar] [CrossRef]
- Xu, G.; Shi, Y.; Sun, X.; Shen, W. Internet of Things in Marine Environment Monitoring: A Review. Sensors 2019, 19, 1711. [Google Scholar] [CrossRef] [Green Version]
- Alippi, C.; Camplani, R.; Galperti, C.; Roveri, M. Effective Design of WSNs: From the Lab to the Real World. In Proceedings of the 3rd International Conference on Sensing Technology, ICST 2008, Taipei, Taiwan, 30 November–3 December 2008; pp. 1–9. [Google Scholar] [CrossRef]
- Cardei, M.; Wu, J. Energy-Efficient Coverage Problems in Wireless Ad-Hoc Sensor Networks. Comput. Commun. 2006, 29, 413–420. [Google Scholar] [CrossRef] [Green Version]
- Alpers, W.; Hühnerfuss, H. The Damping of Ocean Waves by Surface Films: A New Look at an Old Problem. J. Geophys. Res. Ocean. 1989, 94, 6251–6265. [Google Scholar] [CrossRef]
- Topouzelis, K.; Karathanassi, V.; Pavlakis, P.; Rokos, D. Detection and Discrimination between Oil Spills and Look-Alike Phenomena through Neural Networks. ISPRS J. Photogramm. Remote Sens. 2007, 62, 264–270. [Google Scholar] [CrossRef]
- Van der Meer, F.; Jong, S. De Imaging spectrometry: Basic principles and prospective applications. In Basic Principles of Imaging Spectrometry; Kluwer Academic: Alphen aan den Rijn, The Netherlands, 2001; pp. 21–23. [Google Scholar]
- Martins, F.; Leitão, P.; Silva, A.; Neves, R. 3D Modelling in the Sado Estuary Using a New Generic Vertical Discretization Approach. Oceanol. Acta 2001, 24, 51–62. [Google Scholar] [CrossRef] [Green Version]
- Tonacci, A.; Corda, D.; Tartarisco, G.; Pioggia, G.; Domenici, C. A Smart Sensor System for Detecting Hydrocarbon Volatile Organic Compounds in Sea Water. CLEAN–Soil Air Water 2015, 43, 147–152. [Google Scholar] [CrossRef]
- Bourgeois, W.; Stuetz, R.M. Use of a Chemical Sensor Array for Detecting Pollutants in Domestic Wastewater. Water Res. 2002, 36, 4505–4512. [Google Scholar] [CrossRef]
- Sobański, T.; Szczurek, A.; Nitsch, K.; Licznerski, B.W.; Radwan, W. Electronic Nose Applied to Automotive Fuel Qualification. Sens. Actuators B Chem. 2006, 116, 207–212. [Google Scholar] [CrossRef]
- Pieri, G.; Cocco, M.; Salvetti, O. A Marine Information System for Environmental Monitoring: ARGO-MIS. J. Mar. Sci. Eng. 2018, 6, 15. [Google Scholar] [CrossRef] [Green Version]
- Moroni, D.; Pieri, G.; Tampucci, M.; Salvetti, O. Environmental Monitoring Integrated with a Proactive Marine Information System. Proceedings 2018, 2, 98. [Google Scholar] [CrossRef] [Green Version]
- Tonacci, A.; Lacava, G.; Lippa, M.A.; Lupi, L.; Cocco, M.; Domenici, C. Electronic Nose and AUV: A Novel Perspective in Marine Pollution Monitoring. Mar. Technol. Soc. J. 2015, 49, 18–24. [Google Scholar] [CrossRef]
- Ines, Z.; Amina, B.; Mahmoud, R.; Dalila, S.-M. Aliphatic and Aromatic Biomarkers for Petroleum Hydrocarbon Monitoring in Khniss Tunisian-Coast, (Mediterranean Sea). Procedia Environ. Sci. 2013, 18, 211–220. [Google Scholar] [CrossRef] [Green Version]
- Mille, G.; Asia, L.; Guiliano, M.; Malleret, L.; Doumenq, P. Hydrocarbons in Coastal Sediments from the Mediterranean Sea (Gulf of Fos Area, France). Mar. Pollut. Bull. 2007, 54, 566–575. [Google Scholar] [CrossRef]
- Marcelli, M.; Piermattei, V.; Gerin, R.; Brunetti, F.; Pietrosemoli, E.; Addo, S.A.M.; Boudaya, L.; Coleman, R.; Nubi, O.A.; Jojannes, R. Toward the Widespread Application of Low-Cost Technologies in Coastal Ocean Observing (Internet of Things for the Ocean). Mediterr. Mar. Sci. 2021, 22, 255–269. [Google Scholar] [CrossRef]
- Derycke, S.; Remerie, T.; Vierstraete, A.; Backeljau, T.; Vanfleteren, J.; Vincx, M.; Moens, T. Mitochondrial DNA Variation and Cryptic Speciation within the Free-Living Marine Nematode Pellioditis Marina. Mar. Ecol. Prog. Ser. 2005, 300, 91–103. [Google Scholar] [CrossRef] [Green Version]
- Sogin, M.L.; Morrison, H.G.; Huber, J.A.; Welch, D.M.; Huse, S.M.; Neal, P.R.; Arrieta, J.M.; Herndl, G.J. Microbial Diversity in the Deep Sea and the Underexplored “Rare Biosphere”. Proc. Natl. Acad. Sci. USA 2006, 103, 12115–12120. [Google Scholar] [CrossRef] [Green Version]
- Danovaro, R.; Gambi, C.; Dell’Anno, A.; Corinaldesi, C.; Fraschetti, S.; Vanreusel, A.; Vincx, M.; Gooday, A.J. Exponential Decline of Deep-Sea Ecosystem Functioning Linked to Benthic Biodiversity Loss. Curr. Biol. 2008, 18, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Danovaro, R.; Snelgrove, P.V.R.; Tyler, P. Challenging the Paradigms of Deep-Sea Ecology. Trends Ecol. Evol. 2014, 29, 465–475. [Google Scholar] [CrossRef] [PubMed]
- Aguado, E.; Milosevic, Z.; Hernández, C.; Sanz, R.; Garzon, M.; Bozhinoski, D.; Rossi, C. Functional Self-Awareness and Metacontrol for Underwater. Robot Autonomy. Sensors 2021, 21, 1210. [Google Scholar] [CrossRef] [PubMed]
- Eriksen, C.C.; Osse, T.J.; Light, R.D.; Wen, T.; Lehman, T.W.; Sabin, P.L.; Ballard, J.W.; Chiodi, A.M. Seaglider: A Long-Range Autonomous Underwater Vehicle for Oceanographic Research. IEEE J. Ocean. Eng. 2001, 26, 424–436. [Google Scholar] [CrossRef] [Green Version]
- Funaki, M.; Hirasawa, N. Outline of a Small Unmanned Aerial Vehicle (Ant-Plane) Designed for Antarctic Research. Polar Sci. 2008, 2, 129–142. [Google Scholar] [CrossRef] [Green Version]
- Leong, S.C.Y.; Tkalich, P.; Patrikalakis, N.M. Monitoring Harmful Algal Blooms in Singapore: Developing a HABs Observing System. In Proceedings of the Program Book-OCEANS 2012 MTS/IEEE Yeosu: The Living Ocean and Coast-Diversity of Resources and Sustainable Activities, Yeosu, Korea, 21–24 May 2012. [Google Scholar] [CrossRef]
- Meyer, D. Glider Technology for Ocean Observations: A Review. Ocean. Sci. Discuss. 2016, 40, 1–26. [Google Scholar] [CrossRef]
- Williams, S.B.; Pizarro, O.; Webster, J.M.; Beaman, R.J.; Mahon, I.; Johnson-Roberson, M.; Bridge, T.C.L. Autonomous Underwater Vehicle–Assisted Surveying of Drowned Reefs on the Shelf Edge of the Great Barrier Reef, Australia. J. Field Robot. 2010, 27, 675–697. [Google Scholar] [CrossRef]
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their Past, Present and Future Contributions to the Advancement of Marine Geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef] [Green Version]
- Inoue, J.; Curry, J.A.; Maslanik, J.A. Application of Aerosondes to Melt-Pond Observations over Arctic Sea Ice. J. Atmos. Ocean. Technol. 2008, 25, 327–334. [Google Scholar] [CrossRef]
- Forney, K.A.; Ferguson, M.C.; Becker, E.A.; Fiedler, P.C.; Redfern, J.V.; Barlow, J.; Vilchis, I.L.; Ballance, L.T. Habitat-Based Spatial Models of Cetacean Density in the Eastern Pacific Ocean. Endanger. Species Res. 2012, 16, 113–133. [Google Scholar] [CrossRef] [Green Version]
- Hodgson, A.J.; Noad, M.; Marsh, H.; Lanyon, J.; Kniest, E. Using Unmanned Aerial Vehicles for Surveys of Marine Mammals in Australia: Test of Concept. Available online: https://espace.library.uq.edu.au/view/UQ:690328 (accessed on 31 July 2021).
- Koski, W.R.; Allen, T.; Ireland, D.; Buck, G.; Smith, P.R.; Macrander, A.M.; Halick, M.A.; Rushing, C.; Sliwa, D.J.; Mcdonald, T.L. Evaluation of an Unmanned Airborne System for Monitoring Marine Mammals. Aquat. Mamm. 2009, 35, 347–357. [Google Scholar] [CrossRef]
- Lyons, C.; Koski, W.R.; Ireland, D.S. Unmanned Aerial Surveys. In Joint Monitoring Program in the Chukchi and Beaufort Seas, Open Water Seasons 2006; LGL Alaska Research Associates: Anchorage, AK, USA, 2008; Chapter 8; 15p. [Google Scholar]
- Llewellyn, L.E.; Bainbridge, S.J. Getting up Close and Personal: The Need to Immerse Autonomous Vehicles in Coral Reefs. In Proceedings of the OCEANS 2015-MTS/IEEE, Washington, DC, USA, 19–22 October 2016. [Google Scholar] [CrossRef]
- Huvenne, V.A.I.; Bett, B.J.; Masson, D.G.; Le Bas, T.P.; Wheeler, A.J. Effectiveness of a Deep-Sea Cold-Water Coral Marine Protected Area, Following Eight Years of Fisheries Closure. Biol. Conserv. 2016, 200, 60–69. [Google Scholar] [CrossRef] [Green Version]
- Benoist, N.M.A.; Morris, K.J.; Bett, B.J.; Durden, J.M.; Huvenne, V.A.I.; Le Bas, T.P.; Wynn, R.B.; Ware, S.J.; Ruhl, H.A. Monitoring Mosaic Biotopes in a Marine Conservation Zone by Autonomous Underwater Vehicle. Conserv. Biol. 2019, 33, 1174–1186. [Google Scholar] [CrossRef] [PubMed]
- European Environment. Agency Marine Protected Areas-Designed to Conserve Europe’s Marine Life, Marine Protected Areas Are a Globally Recognised Tool for Managing and Enhancing Our Marine Ecosystems; European Environment Agency (EEA): Copenhagen, Denmark, 2018. [Google Scholar]
- Furlong, M.E.; Paxton, D.; Stevenson, P.; Pebody, M.; McPhail, S.D.; Perrett, J. Autosub Long Range: A Long Range Deep Diving AUV for Ocean Monitoring. In Proceedings of the 2012 IEEE/OES Autonomous Underwater Vehicles, AUV 2012, Southampton, UK, 24–27 September 2012. [Google Scholar] [CrossRef]
- Smale, D.A.; Kendrick, G.A.; Harvey, E.S.; Langlois, T.J.; Hovey, R.K.; Van Niel, K.P.; Waddington, K.I.; Bellchambers, L.M.; Pember, M.B.; Babcock, R.C.; et al. Regional-Scale Benthic Monitoring for Ecosystem-Based Fisheries Management (EBFM) Using an Autonomous Underwater Vehicle (AUV). ICES J. Mar. Sci. 2012, 69, 1108–1118. [Google Scholar] [CrossRef]
- Robbins, I.C.; Kirkpatrick, G.J.; Blackwell, S.M.; Hillier, J.; Knight, C.A.; Moline, M.A. Improved Monitoring of HABs Using Autonomous Underwater Vehicles (AUV). Harmful Algae 2006, 5, 749–761. [Google Scholar] [CrossRef] [Green Version]
- Ramos, P.; Cruz, N.; Matos, A.; Neves, M.V.; Pereira, F.L. Monitoring an Ocean Outfall Using an AUV. In Proceedings of the Oceans Conference Record (IEEE), Honolulu, HI, USA, 5–8 November 2001; Volume 3, pp. 2009–2014. [Google Scholar] [CrossRef] [Green Version]
- Marini, S.; Gjeci, N.; Govindaraj, S.; But, A.; Sportich, B.; Ottaviani, E.; Márquez, F.; Sánchez, P.J.B.; Pedersen, J.; Clausen, C.V.; et al. ENDURUNS: An Integrated and Flexible Approach for Seabed Survey Through Autonomous Mobile Vehicles. J. Mar. Sci. Eng. 2020, 8, 633. [Google Scholar] [CrossRef]
- Jones, D.O.B.; Gates, A.R.; Huvenne, V.A.I.; Phillips, A.B.; Bett, B.J. Autonomous Marine Environmental Monitoring: Application in Decommissioned Oil Fields. Sci. Total Environ. 2019, 668, 835–853. [Google Scholar] [CrossRef]
- Huvenne, V.A.I.; Robert, K.; Marsh, L.; Lo Iacono, C.; Le Bas, T.; Wynn, R.B. ROVs and AUVs. In Submarine Geomorphology; Springer Geology: Cham, Swizerland, 2018; pp. 93–108. [Google Scholar] [CrossRef]
- Jawhar, I.; Mohamed, N.; Al-Jaroodi, J.; Zhang, S. An Architecture for Using Autonomous Underwater Vehicles in Wireless Sensor Networks for Underwater Pipeline Monitoring. IEEE Trans. Ind. Inform. 2019, 15, 1329–1340. [Google Scholar] [CrossRef]
- He, Y.; Wang, D.B.; Ali, Z.A. A Review of Different Designs and Control Models of Remotely Operated Underwater Vehicle. Meas. Control. 2020, 53, 1561–1570. [Google Scholar] [CrossRef]
- Griffiths, G. Technology and Applications of Autonomous Underwater Vehicles-Google Libri; CRC Press: Boca Raton, FL, USA, 2002; Volume 2. [Google Scholar]
- Wynn, R.B.; Evans, A.J.; Griffiths, G.; Jones, V.A.I.; Palmer, A.R.; Dove, M.R.; Boyd, J.A. NERC-MAREMAP Report to Defra: AUVs and Gliders for MPA Mapping and Monitoring. Available online: https://eprints.soton.ac.uk/372785/1/DEFRA_MB0118%2528Wynn%2529_FINAL.pdf (accessed on 31 July 2021).
- Verfuss, U.K.; Aniceto, A.S.; Harris, D.V.; Gillespie, D.; Fielding, S.; Jiménez, G.; Johnston, P.; Sinclair, R.R.; Sivertsen, A.; Solbø, S.A.; et al. A Review of Unmanned Vehicles for the Detection and Monitoring of Marine Fauna. Mar. Pollut. Bull. 2019, 140, 17–29. [Google Scholar] [CrossRef]
- Majid, M.H.A.; Arshad, M.R. Design of an Autonomous Surface Vehicle (ASV) for Swarming Application. In Proceedings of the Autonomous Underwater Vehicles 2016, AUV 2016, Tokyo, Japan, 6–9 November 2016; pp. 230–235. [Google Scholar] [CrossRef]
- Rodriguez-Ortiz, C.D. Automated Bathymetry Mapping Using an Autonomous Surface Craft. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1996. [Google Scholar]
- Pahl, J.; Voß, S. Maritime Load Dependent Lead Times-An Analysis; Springer: Cham, Swizerland, 2017; Volume 10572, ISBN 9783319684956. [Google Scholar]
- Odetti, A.; Bruzzone, G.; Altosole, M.; Viviani, M.; Caccia, M. SWAMP, an Autonomous Surface Vehicle Expressly Designed for Extremely Shallow Waters. Ocean. Eng. 2020, 216, 108205. [Google Scholar] [CrossRef]
- Aguzzi, J.; Chatzievangelou, D.; Marini, S.; Fanelli, E.; Danovaro, R.; Flögel, S.; Lebris, N.; Juanes, F.; De Leo, F.C.; Del Rio, J.; et al. New High-Tech Flexible Networks for the Monitoring of Deep-Sea Ecosystems. Environ. Sci. Technol. 2019, 53, 6616–6631. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, F.; Zhu, J.; Chen, L.; Zuo, Y.; Hu, X.; Yang, Y. Autonomous and In Situ Ocean Environmental Monitoring on Optofluidic Platform. Micromachines 2020, 11, 69. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Ryan, J.P.; Kieft, B.; Hobson, B.W.; McEwen, R.S.; Godin, M.A.; Harvey, J.B.; Bellingham, J.G.; Birch, J.M.; Scholin, C.A.; et al. Targeted Sampling by Autonomous Underwater Vehicles. Front. Mar. Sci. 2019, 6, 415. [Google Scholar] [CrossRef] [Green Version]
- Rountree, R.A.; Aguzzi, J.; Marini, S.; Fanelli, E.; De Leo, F.C.; Del Rio, J.; Juanes, F. Towards an optimal design for ecosystem-level ocean observatories. In Oceanography and Marine Biology; Taylor & Francis: Abingdon, UK, 2020. [Google Scholar]
- Hwang, J.; Bose, N.; Fan, S. AUV Adaptive Sampling Methods: A Review. Appl. Sci. 2019, 9, 3145. [Google Scholar] [CrossRef] [Green Version]
- Roper, D.T.; Phillips, A.B.; Harris, C.A.; Salavasidis, G.; Pebody, M.; Templeton, R.; Amma, S.V.S.; Smart, M.; McPhail, S. Autosub Long Range 1500: An Ultra-Endurance AUV with 6000 Km Range. In OCEANS 2017-Aberdeen; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Roper, D.; Harris, C.A.; Salavasidis, G.; Pebody, M.; Templeton, R.; Prampart, T.; Kingsland, M.; Morrison, R.; Furlong, M.; Phillips, A.B.; et al. Autosub Long Range 6000: A Multiple-Month Endurance AUV for Deep-Ocean Monitoring and Survey. IEEE J. Ocean. Eng. 2021, 46, 1179–1191. [Google Scholar] [CrossRef]
- Davis, R.E.; Eriksen, C.C.; Jones, C.P. Autonomous Buoyancy-Driven Underwater Gliders. In The Technology and Applications of Autonomous Underwater Vehicles; CRC Press: London, UK, 2002; pp. 37–58. [Google Scholar]
- Webb, D.C.; Simonetti, P.J.; Jones, C.P. SLOCUM: An Underwater Glider Propelled by Environmental Energy. IEEE J. Ocean. Eng. 2001, 26, 447–452. [Google Scholar] [CrossRef]
- Imlach, J.; Mahr, R. Modification of a Military Grade Glider for Coastal Scientific Applications. In Proceedings of the OCEANS 2012 MTS/IEEE: Harnessing the Power of the Ocean, Hampton Roads, VA, USA, 14–19 October 2012. [Google Scholar] [CrossRef]
- ODYSSEA|Operating a Network of Integrated Observatory Systems in the Mediterranean Sea. Available online: https://odysseaplatform.eu/ (accessed on 24 September 2021).
- Sherman, J.; Davis, R.E.; Owens, W.B.; Valdes, J. The Autonomous Underwater Glider “Spray”. IEEE J. Ocean. Eng. 2001, 26, 437–446. [Google Scholar] [CrossRef] [Green Version]
- Osse, T.J.; Eriksen, C.C. The Deepglider: A Full Ocean Depth Glider for Oceanographic Research. In Proceedings of the Oceans Conference Record (IEEE), Vancouver, BC, Canada, 29 September–4 October 2007. [Google Scholar] [CrossRef]
- Guidetti, P. The Importance of Experimental Design in Detecting the Effects of Protection Measures on Fish in Mediterranean MPAs. Aquat. Conserv. Mar. Freshw. Ecosyst. 2002, 12, 619–634. [Google Scholar] [CrossRef]
- Sciberras, M.; Jenkins, S.R.; Kaiser, M.J.; Hawkins, S.J.; Pullin, A.S. Evaluating the Biological Effectiveness of Fully and Partially Protected Marine Areas. Environ. Evid. 2013, 2, 4. [Google Scholar] [CrossRef] [Green Version]
- Hayes, K.R.; Hosack, G.R.; Lawrence, E.; Hedge, P.; Barrett, N.S.; Przeslawski, R.; Caley, M.J.; Foster, S.D. Designing Monitoring Programs for Marine Protected Areas Within an Evidence Based Decision Making Paradigm. Front. Mar. Sci. 2019, 6, 746. [Google Scholar] [CrossRef]
- Farrell, J.A.; Pang, S.; Li, W. Chemical Plume Tracing via an Autonomous Underwater Vehicle. IEEE J. Ocean. Eng. 2005, 30, 428–442. [Google Scholar] [CrossRef]
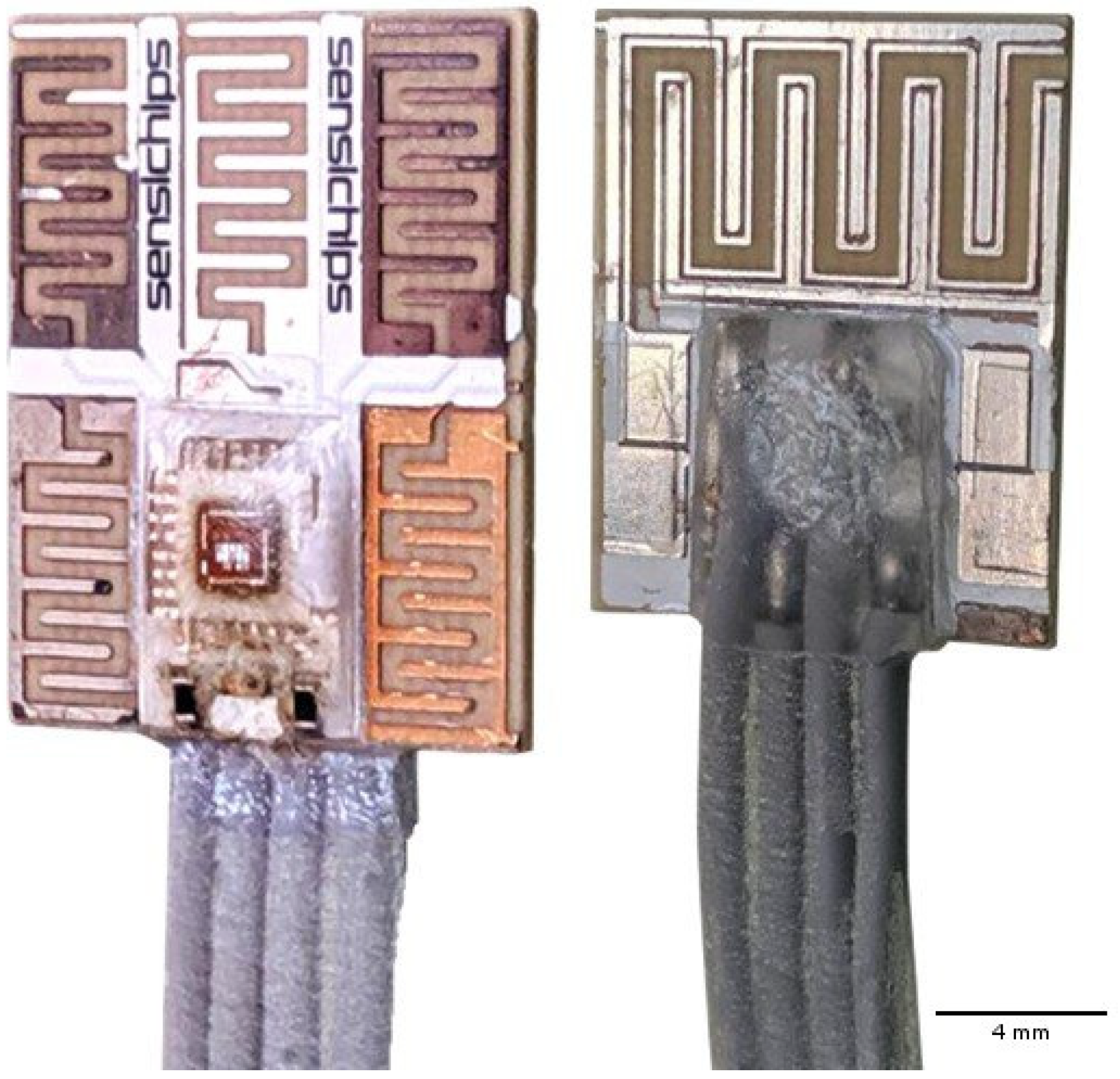
- Sensichips: Learning Microsensors. Available online: https://sensichips.com/ (accessed on 24 September 2021).
- Bria, A.; Cerro, G.; Ferdinandi, M.; Marrocco, C.; Molinara, M. An IoT-Ready Solution for Automated Recognition of Water Contaminants. Pattern Recognit. Lett. 2020, 135, 188–195. [Google Scholar] [CrossRef]
- Bourelly, C.; Bria, A.; Ferrigno, L.; Gerevini, L.; Marrocco, C.; Molinara, M.; Cerro, G.; Cicalini, M.; Ria, A. A Preliminary Solution for Anomaly Detection in Water Quality Monitoring. In Proceedings of the 2020 IEEE International Conference on Smart Computing, Bologna, Italy, 14–17 September 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 410–415. [Google Scholar]
- Aguzzi, J.; Chatzievangelou, D.; Company, J.B.; Thomsen, L.; Marini, S.; Bonofiglio, F.; Juanes, F.; Rountree, R.; Berry, A.; Chumbinho, R.; et al. The Potential of Video Imagery from Worldwide Cabled Observatory Networks to Provide Information Supporting Fish-Stock and Biodiversity Assessment. ICES J. Mar. Sci. 2020, 77, 2396–2410. [Google Scholar] [CrossRef]
- Danovaro, R.; Aguzzi, J.; Fanelli, E.; Billett, D.; Gjerde, K.; Jamieson, A.; Ramirez-Llodra, E.; Smith, C.; Snelgrove, P.; Van Dover, C. An Ecosystem-Based Deep-Ocean Strategy. Science 2017, 355, 452–454. [Google Scholar] [CrossRef]
- Danovaro, R.; Fanelli, E.; Aguzzi, J.; Billett, D.; Carugati, L.; Corinaldesi, C.; Dell’Anno, A.; Gjerde, K.; Jamieson, A.J.; Kark, S.; et al. Ecological Variables for Developing a Global Deep-Ocean Monitoring and Conservation Strategy. Nat. Ecol. Evol. 2020, 4, 181–192. [Google Scholar] [CrossRef]
- Gaughan, P.J.; Kolar, H.R. Implementing a Smartbay on the West Coast of Ireland. J. Ocean. Technol. 2010, 5, 55–70. [Google Scholar]
- Leocádio, A.; Weetman, A.; Wieland, K. (Eds.) Using Underwater Television Surveys to Assess and Advise on Nephrops Stocks; International Council for the Exploration of the Sea. ICES Cooperative: UK, 2018; ISBN 9788774822127. [Google Scholar]
- JNCC. Joint Nature Conservation Committee Scientific Advice on Possible Offshore Marine Conservation Zones Considered for Consultation in 2015; JNCC: Peterborough, UK, 2014. [Google Scholar]
- Bell, E.; Clements, A.; Dobby, H.; Doyle, J.; Feekings, J.; Leocádio, A.; Lordan, C.; Weetman, A.; Wieland, K. Using Underwater Television Surveys to Assess and Advise on Nephrops Stocks. In ICES Cooperative Research Report; International Council for the Exploration of the Sea: Copenhagen, Denmark, 2018. [Google Scholar]
- Cristini, L.; Lampitt, R.S.; Cardin, V.; Delory, E.; Haugan, P.; O’Neill, N.; Petihakis, G.; Ruhl, H.A. Cost and Value of Multidisciplinary Fixed-Point Ocean Observatories. Mar. Policy 2016, 71, 138–146. [Google Scholar] [CrossRef]
- Locascio, J.; Mann, D.; Wilcox, K.; Luther, M. Incorporation of Acoustic Sensors on a Coastal Ocean Monitoring Platform for Measurements of Biological Activity. Mar. Technol. Soc. J. 2018, 52, 64–70. [Google Scholar] [CrossRef]
- Aguzzi, J.; Doya, C.; Tecchio, S.; De Leo, F.C.; Azzurro, E.; Costa, C.; Sbragaglia, V.; Del Río, J.; Navarro, J.; Ruhl, H.A.; et al. Coastal Observatories for Monitoring of Fish Behaviour and Their Responses to Environmental Changes. Rev. Fish Biol. Fish. 2015, 25, 463–483. [Google Scholar] [CrossRef] [Green Version]
- Thomsen, L.; Aguzzi, J.; Costa, C.; De Leo, F.; Ogston, A.; Purser, A. The Oceanic Biological Pump: Rapid Carbon Transfer to Depth at Continental Margins during Winter. Sci. Rep. 2017, 7, 10763. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ocean Networks Canada. Available online: https://www.oceannetworks.ca/ (accessed on 24 September 2021).
- Ten Years (2006–2016) of Oceanographic Temperature, Salinity, Pressure, Density and Dissolved Oxygen Data from the Saanich Inlet Cabled Observatory-Ocean Networks Canada. Available online: https://www.oceannetworks.ca/ (accessed on 24 September 2021).
- Blondel, P.; Hatta, A.A.Z. Acoustic Soundscapes and Biodiversity–Comparing Metrics, Seasons and Depths with Data from the Neptune Ocean Observatory Offshore British Columbia. In Proceedings of the UACE2017-4th Underwater Acoustics Conference and Exhibition ACOUSTIC, Skiathos, Greece, 11 September 2017; pp. 763–768. [Google Scholar]
- Hendricks, B.; Wray, J.L.; Keen, E.M.; Alidina, H.M.; Gulliver, T.A.; Picard, C.R. Automated Localization of Whales in Coastal Fjords. J. Acoust. Soc. Am. 2019, 146, 4672. [Google Scholar] [CrossRef] [PubMed]
- Orlov, A. Possible Ways of Exchange between Asian and American Ichthyofaunas in the North Pacific Ocean. ICES CM 2003, Q:09 (2003b). Available online: https://www.researchgate.net/publication/228961925_Possible_ways_of_exchange_between_Asian_and_American_ichthyofaunas_in_the_North_Pacific_Ocean (accessed on 31 July 2021).
- Hanselman, D.; Heifetz, J.; Echave, K.; Dressel, S. Move It or Lose It: Movement and Mortality of Sablefish Tagged in Alaska. Can. J. Fish. Aquat. Sci. 2014, 72, 238–251. [Google Scholar] [CrossRef]
- Ocean Observatories Initiative–A New Era of Oceanography. Available online: https://oceanobservatories.org/ (accessed on 24 September 2021).
- EMSO–Observing the Ocean to Save the Earth. Available online: http://emso.eu/ (accessed on 24 September 2021).
- Favali, P.; Beranzoli, L. Seafloor Observatory Science: A Review. Geophys 2006, 49, 515–567. [Google Scholar] [CrossRef]
- Best, M.; Favali, P.; Beranzoli, L.; Cannat, M.; Cagatay, N.; Dañobeitia, J.J.; Delory, E.; De Stigter, H.; Ferré, B.; Gillooly, M.; et al. EMSO: A Distributed Infrastructure for Addressing Geohazards and Global Ocean Change. Oceanography 2014, 27, 167–169. [Google Scholar] [CrossRef] [Green Version]
- Ruhl, H.A.; André, M.; Beranzoli, L.; Çaĝatay, M.N.; Colaço, A.; Cannat, M.; Dañobeitia, J.J.; Favali, P.; Géli, L.; Gillooly, M.; et al. Societal Need for Improved Understanding of Climate Change, Anthropogenic Impacts, and Geo-Hazard Warning Drive Development of Ocean Observatories in European Seas. Prog. Oceanogr. 2011, 91, 1–33. [Google Scholar] [CrossRef] [Green Version]
- KM3NeT-Opens a New Window on Our Universe. Available online: https://www.km3net.org/ (accessed on 24 September 2021).
- Breton, L.; Collaboration, N. KM3NeT: Next-generation neutrino telescope in the Mediterranean Sea. Nucl. Instrum. Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2019, 936, 204–207. [Google Scholar] [CrossRef] [Green Version]
- JERICO-S3|Joint European Research Infrastructure for Coastal Observatories. Available online: https://www.jerico-ri.eu/ (accessed on 24 September 2021).
- Puillat, I.; Farcy, P.; Durand, D.; Karlson, B.; Petihakis, G.; Seppälä, J.; Sparnocchia, S. Progress in Marine Science Supported by European Joint Coastal Observation Systems: The JERICO-RI Research Infrastructure. J. Mar. Syst. 2016, 162, 1–3. [Google Scholar] [CrossRef] [Green Version]
- Cotroneo, Y.; Aulicino, G.; Ruiz, S.; Sánchez Román, A.; Torner Tomàs, M.; Pascual, A.; Fusco, G.; Heslop, E.; Tintoré, J.; Budillon, G. Glider Data Collected during the Algerian Basin Circulation Unmanned Survey. Earth Syst. Sci. Data 2019, 11, 147–161. [Google Scholar] [CrossRef] [Green Version]
- First Call|JERICO Research Infrastructure. Available online: https://www.jerico-ri.eu/ta/call-program/first-call/ (accessed on 24 September 2021).
- Van Kranenburg, R. The Internet of Things: A Critique of Ambient Technology and the All-Seeing Network of RFID; Institute of Network Cultures: Amsterdam, The Netherlands, 2008. [Google Scholar]
- Yang, C.; Shen, W.; Wang, X. The Internet of Things in Manufacturing: Key Issues and Potential Applications. IEEE Syst. Man Cybern. Mag. 2018, 4, 6–15. [Google Scholar] [CrossRef]
- IERC-European Research Cluster on the Internet of Things. Available online: http://internet-of-things-research.eu/ (accessed on 24 September 2021).
- Li, C.Z.E.; Deng, Z.W. The Embedded Modules Solution of Household Internet of Things System and The Future Development. Procedia Comput. Sci. 2020, 166, 350–356. [Google Scholar] [CrossRef]
- DG INFSO; EPoSS. Internet of Things: A Roadmap for the Future. INFSO D 2008, 4, 3–27. [Google Scholar]
- Rose, K.; Eldridge, S.; Chapin, L. The Internet of Things: An Overview Understanding the Issues and Challenges of a More Connected World. Proc. Internet Soc. (ISOC) 2015, 57, 1–53. [Google Scholar]
- Tarkoma, S.; Katasonov, A. Internet of Things Strategic Research Agenda. In Finnish Strategic Centre for Science, Technology and Innovation. Available online: http://www.internetofthings.fi/ (accessed on 12 December 2021).
- Fang, S.; Xu, L.D.; Zhu, Y.; Ahati, J.; Pei, H.; Yan, J.; Liu, Z. An Integrated System for Regional Environmental Monitoring and Management Based on Internet of Things. IEEE Trans. Ind. Inform. 2014, 10, 1596–1605. [Google Scholar] [CrossRef]
- Fleisch, E. What is the internet of things? An economic prospective. Econ. Manag. Financ. Mark. 2010, 5, 125–157. [Google Scholar]
- Ray, P.P. A Survey on Internet of Things Architectures. J. King Saud Univ. -Comput. Inf. Sci. 2018, 30, 291–319. [Google Scholar] [CrossRef] [Green Version]
- Mallon, S. IoT Is the Most Important Development of the 21st Century. Available online: https://www.smartdatacolletive.com/iot-most-important-development-of-21st-century/ (accessed on 12 December 2021).
- Sarika, A.K.; Vinit, D.; Durafe, M.A. A Review Paper on Internet of Things and It’s Applications. Int. Res. J. Eng. Technol. 2019, 6, 1623–1630. [Google Scholar]
- Madakam, S.; Ramaswamy, R.; Tripathi, S. Internet of Things (IoT): A Literature Review. Comput. Commun. 2015, 3, 164–173. [Google Scholar] [CrossRef] [Green Version]
- Eysenbach, G. What Is E-Health? J. Med. Internet Res. 2001, 3, e20. [Google Scholar] [CrossRef]
- Ahmed, B.S.; Bures, M.; Frajtak, K.; Cerny, T. Aspects of Quality in Internet of Things (IoT) Solutions: A Systematic Mapping Study. IEEE Access 2019, 7, 13758–13780. [Google Scholar] [CrossRef]
- Tziortzioti, C.; Amaxilatis, D.; Mavrommati, I.; Chatzigiannakis, I. IoT Sensors in Sea Water Environment: Ahoy! Experiences from a Short Summer Trial. Electron. Notes Theor. Comput. Sci. 2019, 343, 117–130. [Google Scholar] [CrossRef]
- Zeinab, K.; Elmustafa, S. Internet of Things Applications, Challenges and Related Future Technologies. World Sci. News 2017, 67, 126–148. [Google Scholar]
- Al Nuaimi, E.; Al Neyadi, H.; Mohamed, N.; Al-Jaroodi, J. Applications of Big Data to Smart Cities. J. Internet Serv. Appl. 2015, 6, 15. [Google Scholar] [CrossRef] [Green Version]
- Khan, R.; Khan, S.U.; Zaheer, R.; Khan, S. Future Internet: The Internet of Things Architecture, Possible Applications and Key Challenges. In Proceedings of the 10th International Conference on Frontiers of Information Technology, FIT 2012, Islamabad, Pakistan, 17–19 December 2012; pp. 257–260. [Google Scholar]
- Hong, W.J.; Shamsuddin, N.; Abas, E.; Apong, R.A.; Masri, Z.; Suhaimi, H.; Gödeke, S.H.; Noh, M.N.A. Water Quality Monitoring with Arduino Based Sensors. Environments 2021, 8, 6. [Google Scholar] [CrossRef]
- Domingo, M.C. An Overview of the Internet of Things for People with Disabilities. J. Netw. Comput. Appl. 2012, 35, 584–596. [Google Scholar] [CrossRef]
- Xu, G.; Shen, W.; Wang, X. Applications of Wireless Sensor Networks in Marine Environment Monitoring: A Survey. Sensors 2014, 14, 16932–16954. [Google Scholar] [CrossRef] [Green Version]
- Sanchez-Iborra, R.; Liaño, I.G.; Simoes, C.; Couñago, E.; Skarmeta, A.F. Tracking and Monitoring System Based on LoRa Technology for Lightweight Boats. Electronics 2019, 8, 15. [Google Scholar] [CrossRef] [Green Version]
- Al-Zaidi, R.; Woods, J.; Al-Khalidi, M.; Alheeti, K.M.A.; McDonald-Maier, K. Next Generation Marine Data Networks in an IoT Environment. In Proceedings of the 2017 2nd International Conference on Fog and Mobile Edge Computing, FMEC 2017, Valencia, Spain, 8–11 May 2017; pp. 50–55. [Google Scholar] [CrossRef] [Green Version]
- Ebrahimi, S.H.; Ossewaarde, M.; Need, A. Smart Fishery: A Systematic Review and Research Agenda for Sustainable Fisheries in the Age of AI. Sustainability 2021, 13, 6037. [Google Scholar] [CrossRef]
- Kritzer, J.P. Influences of At-Sea Fishery Monitoring on Science, Management, and Fleet Dynamics. Aquac. Fish. 2020, 5, 107–112. [Google Scholar] [CrossRef]
- Sala, E.; Mayorga, J.; Costello, C.; Kroodsma, D.; Palomares, M.; Pauly, D.; Sumaila, U.; Zeller, D. The Economics of Fishing the High Seas. Sci. Adv. 2018, 4. [Google Scholar] [CrossRef] [Green Version]
- Bartholomew, D.C.; Mangel, J.C.; Alfaro-Shigueto, J.; Pingo, S.; Jimenez, A.; Godley, B.J. Remote Electronic Monitoring as a Potential Alternative to On-Board Observers in Small-Scale Fisheries. Biol. Conserv. 2018, 219, 35–45. [Google Scholar] [CrossRef]
- Luan, J.; Zhang, C.; Xu, B.; Xue, Y.; Ren, Y. The Predictive Performances of Random Forest Models with Limited Sample Size and Different Species Traits. Fish. Res. 2020, 227, 105534. [Google Scholar] [CrossRef]
- Gloaguen, P.; Mahévas, S.; Rivot, E.; Woillez, M.; Guitton, J.; Vermard, Y.; Etienne, M.P. An Autoregressive Model to Describe Fishing Vessel Movement and Activity. Environmetrics 2015, 26, 17–28. [Google Scholar] [CrossRef] [Green Version]
- Mutalipassi, M.; Esposito, R.; Ruocco, N.; Viel, T.; Costantini, M.; Zupo, V. Bioactive Compounds of Nutraceutical Value from Fishery and Aquaculture Discards. Foods 2021, 10, 1495. [Google Scholar] [CrossRef]
- Franceschini, S.; Mattei, F.; D’Andrea, L.; Di Nardi, A.; Fiorentino, F.; Garofalo, G.; Scardi, M.; Cataudella, S.; Russo, T. Rummaging through the Bin: Modelling Marine Litter Distribution Using Artificial Neural Networks. Mar. Pollut. Bull. 2019, 149, 110580. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, S.; Liu, J.; Gao, Q.; Dong, S.; Zhou, C. Deep Learning for Smart Fish Farming: Applications, Opportunities and Challenges. Rev. Aquac. 2021, 13, 66–90. [Google Scholar] [CrossRef]
- Kylili, K.; Hadjistassou, C.; Artusi, A. An Intelligent Way for Discerning Plastics at the Shorelines and the Seas. Environ. Sci. Pollut. Res. 2020, 27, 42631–42643. [Google Scholar] [CrossRef]
- Cantorna, D.; Dafonte, C.; Iglesias, A.; Arcay, B. Oil Spill Segmentation in SAR Images Using Convolutional Neural Networks. A Comparative Analysis with Clustering and Logistic Regression Algorithms. Appl. Soft Comput. 2019, 84, 105716. [Google Scholar] [CrossRef]
- Liu, S.; Liu, Y.; Alabia, I.; Tian, Y.; Ye, Z.; Yu, H.; Li, J.; Cheng, J. Impact of Climate Change on Wintering Ground of Japanese Anchovy (Engraulis Japonicus) Using Marine Geospatial Statistics. Front. Mar. Sci. 2020, 7, 604. [Google Scholar] [CrossRef]
- Song, D.; Zhen, Z.; Wang, B.; Li, X.; Gao, L.; Wang, N.; Xie, T.; Zhang, T. A Novel Marine Oil Spillage Identification Scheme Based on Convolution Neural Network Feature Extraction from Fully Polarimetric SAR Imagery. IEEE Access 2020, 8, 59801–59820. [Google Scholar] [CrossRef]
- Al-Ruzouq, R.; Gibril, M.B.A.; Shanableh, A.; Kais, A.; Hamed, O.; Al-Mansoori, S.; Khalil, M.A. Sensors, Features, and Machine Learning for Oil Spill Detection and Monitoring: A Review. Remote Sens. 2020, 12, 3338. [Google Scholar] [CrossRef]
- Pittenger, R.; Anderson, B.; Benetti, D.D.; Dayton, P. Sustainable Marine Aquaculture: Fulfilling the Promise; Managing the Risks; Marine Aquaculture Task Force: Takoma Park, MD, USA, 2007. [Google Scholar]
- Goldburg, R.J.; Elliott, M.S.; Nayor, R.L. Marine Aquaculture in the United States: Environmental Impacts and Policy Options. In Pew Oceans Commission; PEWOC: Arlington, VA, USA, 2001. [Google Scholar]
- Braaten, B.R. Cage Aquaculture and Environmental Impacts. In Aquacultural Engineering and Environment; Research Signpost: Trivandrum, India, 2007; pp. 49–92. [Google Scholar]
- Goldburg Future Seascapes, Fishing, and Fish Farming. Front. Ecol. Environ. 2005, 3, 21–28. [CrossRef]
- Neill, W.H.; Brandes, T.S.; Burke, B.J.; Craig, S.R.; Dimichele, L.V.; Duchin, K.; Edwards, R.E.; Fontaine, L.P.; Gatlin, D.M.; Hutchins, C.; et al. Ecophys.Fish: A Simulation Model of Fish Growth in Time-Varying Environmental Regimes. Rev. Fish. Sci. 2004, 12, 233–288. [Google Scholar] [CrossRef]
- Holmer, M. Environmental Issues of Fish Farming in Offshore Waters: Perspectives, Concerns and Research Needs. Aquac. Environ. Interact. 2010, 1, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Wu, R.S.S. The Environmental Impact of Marine Fish Culture: Towards a Sustainable Future. Mar. Pollut. Bull. 1995, 31, 159–166. [Google Scholar] [CrossRef]
- Pearson, T.H.; Black, K.D. The Environmental Impacts of Marine Fish Cage Culture. In Environmental Impacts of Aquaculture; Sheffield Academic Press: UK, 2000; pp. 1–31. Available online: https://www.cabdirect.org/cabdirect/abstract/20013012517 (accessed on 31 July 2021).
- Hargrave, B.T. Far-Field Environmental Effects of Marine Finfish Aquaculture. A Scientific Review of the Potential Environmental Effects of Aquaculture in Aquatic Ecosystems. Can. Tech. Rep. Fish. Aquat. Sci. 2003, 1, 1–35. [Google Scholar]
- Grigorakis, K.; Rigos, G. Aquaculture Effects on Environmental and Public Welfare–The Case of Mediterranean Mariculture. Chemosphere 2011, 85, 899–919. [Google Scholar] [CrossRef]
- Mustafa, F.H.; Bagul, A.H.B.P.; Senoo, S.; Shapawi, R. A Review of Smart Fish Farming Systems. J. Aquac. Eng. Fish. Res. 2016, 2, 193–200. [Google Scholar] [CrossRef]
- Huntingford, F.A.; Adams, C.; Braithwaite, V.A.; Kadri, S.; Pottinger, T.G.; Sandøe, P.; Turnbull, J.F. Current Issues in Fish Welfare. J. Fish Biol. 2006, 68, 332–372. [Google Scholar] [CrossRef] [Green Version]
- Conte, F.S. Stress and the Welfare of Cultured Fish. Appl. Animal Behav. Sci. 2004, 86, 205–223. [Google Scholar] [CrossRef]
- Black, K.D. The environmental interactions associated with fish culture. In Biology of Farmed Fish; Sheffield Academic Press: Cambridge, MA, USA, 1998; pp. 284–326. [Google Scholar]
- Pennell, W.; Barton, B.A. Principles of Salmonid Culture. In Developments in Aquaculture and Fisheries Science; Elsevier: Amsterdam, The Netherlands, 1996. [Google Scholar]
- Beyan, C.; Browman, H.I. Setting the Stage for the Machine Intelligence Era in Marine Science. ICES J. Mar. Sci. 2020, 77, 1267–1273. [Google Scholar] [CrossRef]
- Stien, L.H.; Gytre, T.; Torgersen, T.; Sagen, H.; Kristiansen, T.S. A System for Online Assessment of Fish Welfare in Aquaculture. ICES CM 2008, R:18. Available online: https://imr.brage.unit.no/imr-xmlui/handle/11250/102545 (accessed on 31 July 2021).
- Neeraja, Y.; Scholar, U. An IOT Based Remote Aquaculture Monitoring System. Int. J. Eng. Trends Appl. (IJETA) 2014, 5, 188. [Google Scholar]
- Halpin, T. Conceptual Schema & Relational Database Design; WytLytPub: Hoboken, NJ, USA, 1999. [Google Scholar]
- Zhang, Y.; Hua, J.; Wang, Y. Bin Application Effect of Aquaculture IOT System. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2013; Volume 303–306, pp. 1395–1401. [Google Scholar] [CrossRef]
- Li, D.; Fu, Z. Aquaculture Digital Integrated Systeme; Electronic Industry Press: Beijing, China, 2010. [Google Scholar]
- Li, D.; Fu, Z.; Ma, L. Intelligent Aquaculture Information System Design and Preliminary Realizationtle. Agric. Eng. J. 2000, 4, 135–138. [Google Scholar]
- Cario, G.; Casavola, A.; Gjanci, P.; Lupia, M.; Petrioli, C.; Spaccini, D. Long Lasting Underwater Wireless Sensors Network for Water Quality Monitoring in Fish Farms. In Proceedings of the OCEANS 2017-Aberdeen 2017, Aberdeen, UK, 19–22 June 2017; pp. 1–6. [Google Scholar] [CrossRef]
- An, J. The Freshwater Fish Feed Expert System Research Based on the WEB; China Agricultural University: Guangzhou, China, 2002. [Google Scholar]
- Xu, G. National Intelligent Information Technology in Agriculture Popularization and Application of Basic Operation Mechanism Research Summary. Hunan Agric. Sci. 2004, 2, 57–59. [Google Scholar]
- Vikas, M.; Dwarakish, G.S. Coastal Pollution: A Review. Aquat. Procedia 2015, 4, 381–388. [Google Scholar] [CrossRef]
- Pirotta, V.; Grech, A.; Jonsen, I.D.; Laurance, W.F.; Harcourt, R.G. Consequences of Global Shipping Traffic for Marine Giants. Front. Ecol. Environ. 2019, 17, 39–47. [Google Scholar] [CrossRef] [Green Version]
- Er-Raioui, H.; Bouzid, S.; Marhraoui, M.; Saliot, A. Hydrocarbon Pollution of the Mediterranean Coastline of Morocco. Ocean. Coast. Manag. 2009, 52, 124–129. [Google Scholar] [CrossRef]
- Orfanidis, S.; Panayotidis, P.; Stamatis, N. Ecological Evaluation of Transitional and Coastal Waters: A Marine Benthic Macrophytes-Based Model. Mediterr. Mar. Sci. 2001, 2, 45–66. [Google Scholar] [CrossRef]
- Boudouresque, C.F.; Mayot, N.; Pergent, G. The Outstanding Traits of The Functioning of the Posidonia Oceanica Seagrass Ecosystem. Biol. Mar. Medit. 2006, 13, 109–113. [Google Scholar]
- Micheli, F.; Levin, N.; Giakoumi, S.; Katsanevakis, S.; Abdulla, A.; Coll, M.; Fraschetti, S.; Kark, S.; Koutsoubas, D.; Mackelworth, P.; et al. Setting Priorities for Regional Conservation Planning in the Mediterranean Sea. PLoS ONE 2013, 8, e59038. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Notarbartolo di Sciara, G.; Zanardelli, M.; Jahoda, M.; Panigada, S.; Airoldi, S. The Fin Whale Balaenoptera Physalus (L. 1758) in the Mediterranean Sea. Mammal Rev. 2003, 33, 105–150. [Google Scholar] [CrossRef]
- Azzellino, A.; Panigada, S.; Lanfredi, C.; Zanardelli, M.; Airoldi, S.; Notarbartolo di Sciara, G. Predictive Habitat Models for Managing Marine Areas: Spatial and Temporal Distribution of Marine Mammals within the Pelagos Sanctuary (Northwestern Mediterranean Sea). Ocean. Coast. Manag. 2012, 67, 63–74. [Google Scholar] [CrossRef]
- Trasviña-Moreno, C.A.; Blasco, R.; Marco, Á.; Casas, R.; Trasviña-Castro, A. Unmanned Aerial Vehicle Based Wireless Sensor Network for Marine-Coastal Environment Monitoring. Sensors 2017, 17, 460. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operates | Controlled by | Navigation System | Propulsion | ||||||
|---|---|---|---|---|---|---|---|---|---|
| UMV | In Air | Water Surface | Under Water | Operator | Independent | GPS Navigation | e- Compass | Propellers | Variable Buoyancy |
| UAS | X | X | X | X | X | ||||
| ASV/USV | X | X | X | X | |||||
| AUV | X | X | X | X | |||||
| ROUV | X | X | X | X | |||||
| Glider | X | X | X | X | X | X | X | ||
| ELECTRICAL | |
| Supply voltage | 1.5–3.6 V |
| Max current | 0.4 mA continuous when reading on-chip sensors with EIS |
| Size | 12 × 15 mm, 3 mm thickness |
| Interface | I2C or SENSIBUS, single data wire multidrop sensor array cable interface, 1.5–3.6 V |
| Unique identifier | OTP 48 bits unique device identifier, 16 bits user-defined |
| ELECTRICAL IMPEDANCE SPECTROSCOPY | |
| Frequency | From 3.1 mHz to 1.2 MHz |
| Vpp output sinewave | From 156 mV to 2.8 Vpp |
| Coherent demodulation | 1st, 2nd, or 3rd harmonic |
| Output | Reciprocal of real or imagery component |
| Wide measurement range | From ohms to 100 MΩ |
| TEMPERATURE | |
| Range | −40–125 °C |
| Accuracy | ±0.1 °C |
| Thermodynamics | Calorimetry, enthalpy, and exothermic or endothermic |
| ELECTROCHEMICAL METHODS | |
| pH | From 3 to 14, potential of platinum vs. clads-platinum |
| ORP | Total oxidation and reduction potentials |
| RedOx | Reduction or oxidation activity (free chlorine, hardness) |
| Voltammetry | Specific reduction or oxidation potentials |
| Anodic stripping voltammetry | Measures heavy metals |
| Electro-catalysis | Noble metal IDEs measure current specifically |
| IMPEDANCE METHODS | |
| Conductivity spectroscopy | Resistivity, salinity, EC, TDS, and absorption dynamics |
| Dielectric spectroscopy | Turbidity, SS, biomass total and active, and hydrocarbon detection |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Glaviano, F.; Esposito, R.; Cosmo, A.D.; Esposito, F.; Gerevini, L.; Ria, A.; Molinara, M.; Bruschi, P.; Costantini, M.; Zupo, V. Management and Sustainable Exploitation of Marine Environments through Smart Monitoring and Automation. J. Mar. Sci. Eng. 2022, 10, 297. https://doi.org/10.3390/jmse10020297
Glaviano F, Esposito R, Cosmo AD, Esposito F, Gerevini L, Ria A, Molinara M, Bruschi P, Costantini M, Zupo V. Management and Sustainable Exploitation of Marine Environments through Smart Monitoring and Automation. Journal of Marine Science and Engineering. 2022; 10(2):297. https://doi.org/10.3390/jmse10020297
Chicago/Turabian StyleGlaviano, Francesca, Roberta Esposito, Anna Di Cosmo, Francesco Esposito, Luca Gerevini, Andrea Ria, Mario Molinara, Paolo Bruschi, Maria Costantini, and Valerio Zupo. 2022. "Management and Sustainable Exploitation of Marine Environments through Smart Monitoring and Automation" Journal of Marine Science and Engineering 10, no. 2: 297. https://doi.org/10.3390/jmse10020297
APA StyleGlaviano, F., Esposito, R., Cosmo, A. D., Esposito, F., Gerevini, L., Ria, A., Molinara, M., Bruschi, P., Costantini, M., & Zupo, V. (2022). Management and Sustainable Exploitation of Marine Environments through Smart Monitoring and Automation. Journal of Marine Science and Engineering, 10(2), 297. https://doi.org/10.3390/jmse10020297