1. Introduction
In marine environments, various forms of bubble layers are constantly induced by the wind, ship movement, the activities of living organisms, earthquakes, and other processes. However, these bubble layers can cause acoustic interferences during acoustic signal acquisition for marine surveys. For example, the acoustic signal received by sonar (sound navigation and ranging) equipment is attenuated by bubble clusters, resulting in a sound pressure level below the expected value. Nevertheless, this same principle can be used as a valuable acoustic masking technique. This technique is widely applied to suppress explosive shock waves by blasting them with bubble curtains, as well as to reduce noise from wind farms [
1,
2]. Additionally, this technique has been widely investigated for military purposes, such as the development of masker emitter belts to reduce the intensity of noise generated from the hull of a surface ship by artificially generating air bubbles from the hull, which protects the hull from an explosive shock wave of external origin [
3,
4]. Furthermore, this principle can be used as the basis for the development of a propeller air-induced emission (PRAIRIE) system, which artificially generates air bubbles near the propeller to prevent the propagation of noise and reduce the noise of the cavity caused by the rotation of the propeller of the ship, minimize the vibration of the hull, and suppress propeller erosion [
5,
6]. Therefore, characterizing the acoustic properties and distribution of bubble clusters in water provides a valuable basis for the development of both civil and military technologies.
Previous studies have explored various approaches to characterize the acoustic properties of air bubbles distributed in water [
7,
8,
9,
10]. For instance, our research team successfully measured the acoustic properties of artificially created air bubbles using an acoustic Doppler current profiler (ADCP) [
10]. However, unlike the measurement of acoustic properties, characterizing the distribution of bubble clusters in a real sea environment is rather challenging. Since the early studies of Johnson and Cooke [
11] and Stokes and Deane [
12], many researchers have attempted to measure the distribution of bubbles by using optical data. Recently, Park [
13] measured the distribution characteristics of bubble clusters by using a high-speed Photron FASTCAM MiniAX50 camera, whereas Bae et al. [
10] measured the distribution of bubbles using a phase Doppler particle analyzer (PDPA). However, these optical measurement methods have inherent limitations because they characterize the distribution of a three-dimensional space using two-dimensional data. Medwin and Breitz [
14] and Farmer et al. [
15] predicted bubble distribution using an acoustic resonator. However, this approach can only feasibly be used to characterize small areas and is therefore not suitable for measuring larger bubble clusters such as those that occur in real-life situations.
Along with the development of computer technology, an increasing number of studies have explored the applicability of numerical analysis techniques for image analysis. Acoustic tomography is a numerical analysis technique that is widely used in geophysics and oceanography. This technique is used to estimate the distribution of objects in a three-dimensional space by determining the point at which the difference between the observed travel time and the value calculated through numerical modeling is minimized. This approach allows researchers to quickly and efficiently characterize the long-wavelength structures of a given medium [
16]. Waveform inversion, which is another numerical analysis technique, performs optimization using not only travel time but also a variety of waveform details such as amplitude and phase. In contrast, acoustic tomography uses travel time only. The waveform inversion technique requires the sound source signal used for accurate imaging. Additionally, more accurate property estimation and imaging can be achieved as the number of receivers increases. However, computational cost constitutes another important bottleneck, as these costs increase rapidly as sampling frequency increases [
17]. To address this issue, Zhang et al. [
18] proposed a source-independent direct envelope inversion (SIDEI) approach and demonstrated that physical properties can be effectively obtained using arbitrary sound source information even without accurate source information. This technique uses a sound source with a lower frequency than that of the source of the observation data and utilizes the envelope of the observed signal. Therefore, robust results can be obtained with a low computational cost. However, despite the many advantages of acoustic tomography and SIDEI for the estimation of the boundary of distribution, these techniques cannot accurately estimate the exact boundary.
Reverse-time migration (RTM) is another numerical analysis technique that can accurately derive information on the interface of a medium. This approach is mainly used to understand the structure of strata and reservoirs in natural resource surveys. RTM has a lower computational cost than other numerical analysis techniques and can be imaged with fewer transmitters and receivers. Therefore, RTM is widely used in geophysics and other fields [
19]. The RTM value at a specific point in the grating medium can be accurately estimated through zero-lag cross-correlation between the wavefield radiated by the source and the wavefield reflected from the anomaly [
20]. However, modeling the reflected wavefields from the anomaly is challenging. Therefore, once the back-propagated wavefield is obtained by reversely propagating the acoustic signal recorded in the receiver, an accurate boundary can be obtained through zero-lag cross-correlation with the source wavefield. This technique allows for the estimation of the boundary of the medium, but the physical property value cannot be estimated.
In this study, we estimated the three-dimensional distribution characteristics of a bubble cluster in a marine environment by applying RTM. The analysis of three-dimensional characteristics is often time-consuming and demands a high level of computational resources and associated costs. Therefore, an envelope waveform for a sound source with a lower frequency than the actual one was used to overcome this problem. Six sonar array systems with the same configuration were designed and developed to acquire acoustic signals from the bubble cluster and used as measuring devices. After generating the artificial bubbles in the center area of the measuring device installed for the sea experiment, sound waves were transmitted and recorded to obtain the sound waves affected by the artificial bubbles. The acquired acoustic data were then submitted to a simple preprocessing process, after which the RTM technique with the envelope of the waveform was applied to successfully image the distribution of the bubble clusters.
Section 2 introduces the RTM with an envelope waveform used for bubble distribution imaging.
Section 3 describes the design of the sea experiment, including the composition of the sea experiment, the equipment, and the measurement method.
Section 4 explores the applicability of the proposed method through a synthetic example. This section also presents the results derived from imaging the three-dimensional distribution of bubble clusters in an actual sea experiment. Finally,
Section 5 summarizes our key findings and conclusions.
2. Imaging Technique for Bubble Distribution
In this study, the RTM method based on the numerical modeling of the acoustic wave equation was applied to image the distributional characteristics of the bubble cluster. In this method, imaging condition
can be derived by determining the zero-lag cross-correlation between the wavefield propagated from the sound source and the wavefield obtained by back-propagating the observation data recorded in the receiver [
21].
Here,
are the three-dimensional positions,
is the time,
is the forward propagated wavefield of the source,
is the back-propagated wavefield from the receiver, and
is the maximum recording time. This amplitude provides no explicit physical relationship such as reflectivity. However, it does provide a boundary structure, because this method is meant to accurately detect the location of the boundary where the sound waves are reflected due to differences in acoustic impedance [
22]. In this study, an envelope waveform was used to reduce computational cost. If Equation (1) is expressed as the zero-lag cross-correlation between the observation data expressed by the envelope waveform and the partial derivative wavefield, it can be expressed as Equation (2) [
20,
23]:
where
is the sound velocity;
is the envelope of signals generated by numerical modeling;
is the envelope of signals obtained from the real experiment; operator
is the transpose matrix. The partial derivative wavefield of the sound velocity at each point in the envelope of the modeling data is expressed in the following equation as a direct envelope Fréchet derivative based on the energy-scattering method [
24,
25]:
where
is Green’s function of the envelope and
is the virtual source of the envelope waveform. The final RTM expression using the envelope waveform can be derived by substituting Equation (3) into Equation (2) as follows:
Forward modeling is conducted, and the virtual sound source term can be derived by calculating the envelope of the obtained wavefield. Then, the back-propagated wavefield is obtained by calculating the wavefield at all of the points after the envelope of the observed data is back-propagated at the receiver points. The distribution boundary of the bubble layer can be imaged by cross-correlating the obtained back-propagated wavefield with the envelope virtual source term. Accordingly, this method can be used to image the distribution characteristics of the bubble cluster. Additional bubble-distribution-related features, such as the survival time and distribution depth of the bubble cluster, can be estimated by observing the changes in the bubble cluster over time.
3. Design of the Sea Experiment
3.1. Experiment Configuration
Reflected or scattered acoustic signals must be acquired from bubble clusters to confirm their distribution in a seawater environment. In this study, a suitable sonar array system was developed to successfully acquire the acoustic signal for the bubble cluster.
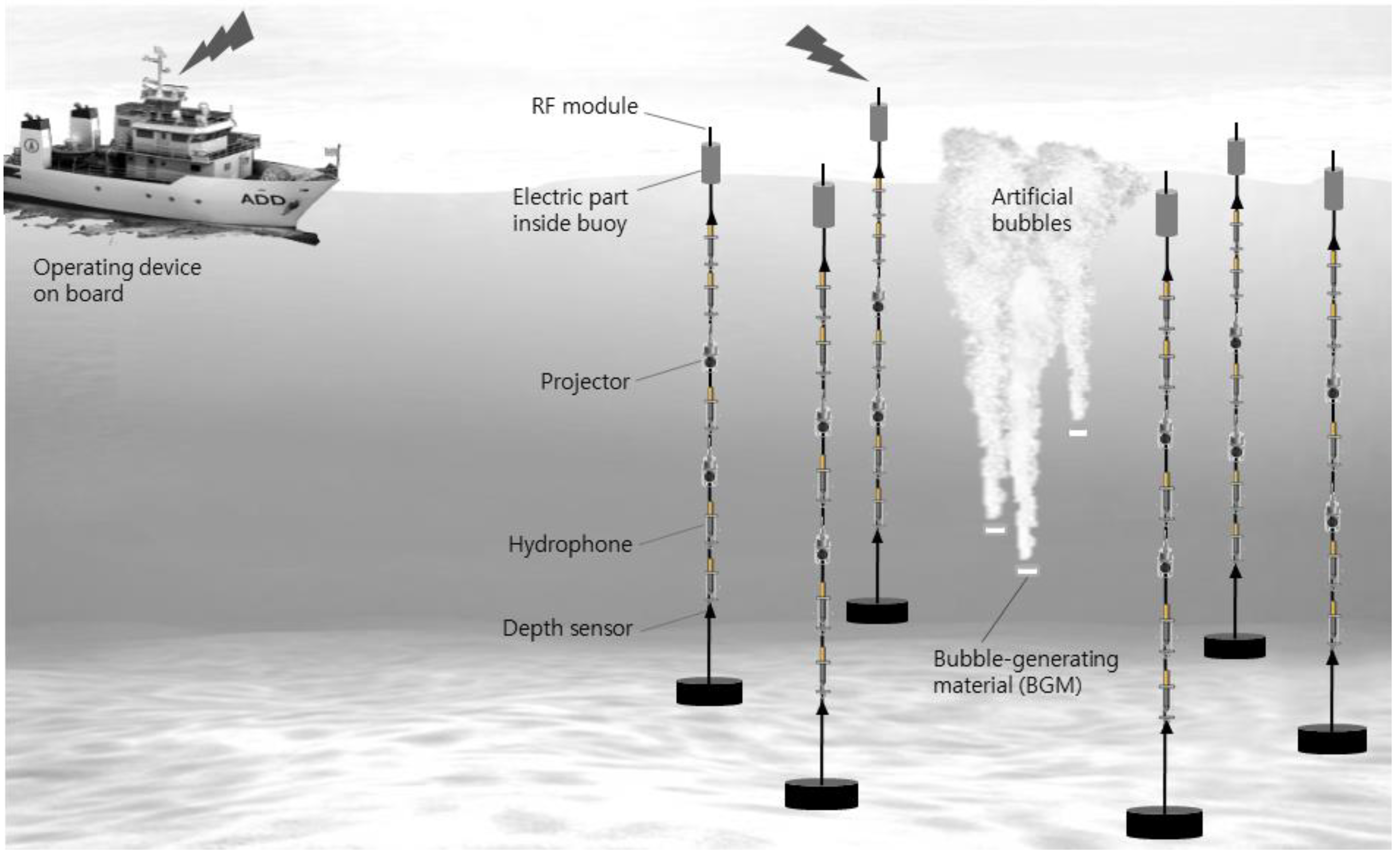
Figure 1 illustrates a schematic of the sea experiment that was conducted to obtain acoustic data using a multi-sonar array system. In the experimental design, sonar arrays, including transmitters and receivers, are deployed to have a certain distance from the bubble cluster to be measured. The main control unit that controls the six sonar array systems is located on a survey ship, and a radio frequency (RF) modem is used to communicate with the sonar array system. An acoustic source is transmitted by a measurement system to the water based on the signals received from the RF modem. A radiated acoustic signal is then passed or reflected by the bubble cluster and recorded by receivers located in the measurement system. The recorded data are transmitted to a survey vessel through RF communication so that an operator can monitor the cluster in real time. The transmitters and receivers of each measurement system are synchronized using a GPS module. Additionally, the exact depth of each sensor can be monitored using the depth sensors located at the top and bottom of each system array.
3.2. Development of a Measurement System
A measurement system was developed to characterize the distribution of the bubble clusters in the sea. The developed system was composed of six sets of marine buoys and a land station that acquires, displays, and stores the data measured from the buoys in real time.
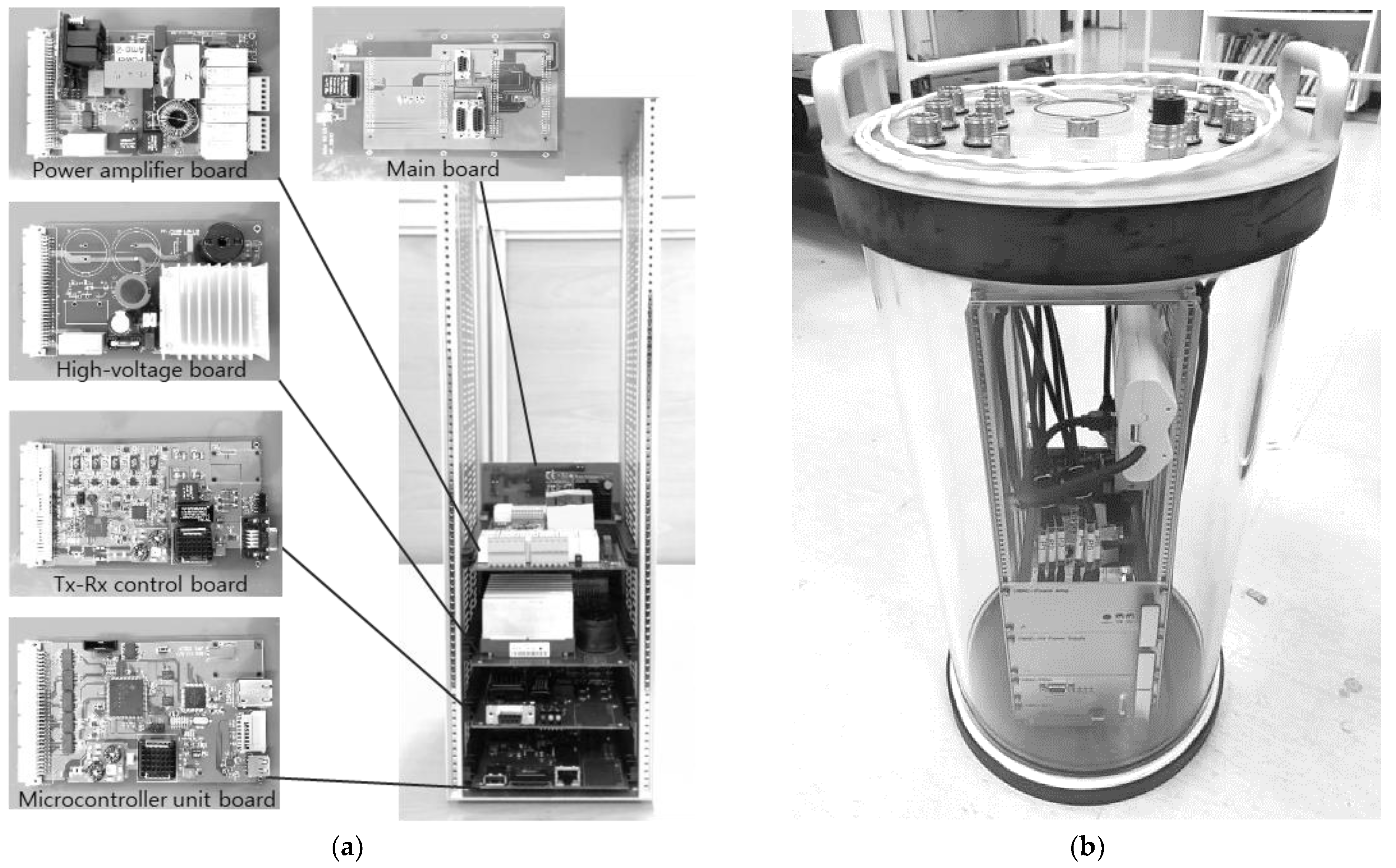
In this system, the marine buoy component transmits sound sources to water according to the command received from the land station, receives the signal reflected from the bubble cluster, and transmits data to the land station. This part consisted of a power amplifier board for an output of >190 dB, a high-voltage board as a power supply, a Tx-Rx control board for signal acquisition and transmission signal generation, a microcontroller unit (MCU) board, and the main board (
Figure 2). Additionally, an RF communication modem was mounted on the system to link to the land station. The marine buoy component was a combination of two projectors (Teledyne Marine TC 1026), five hydrophones (Benthowave BII-7016FG), two pressure depth sensors, a GPS module, an RF communication antenna, and a buoy containing electronic components.
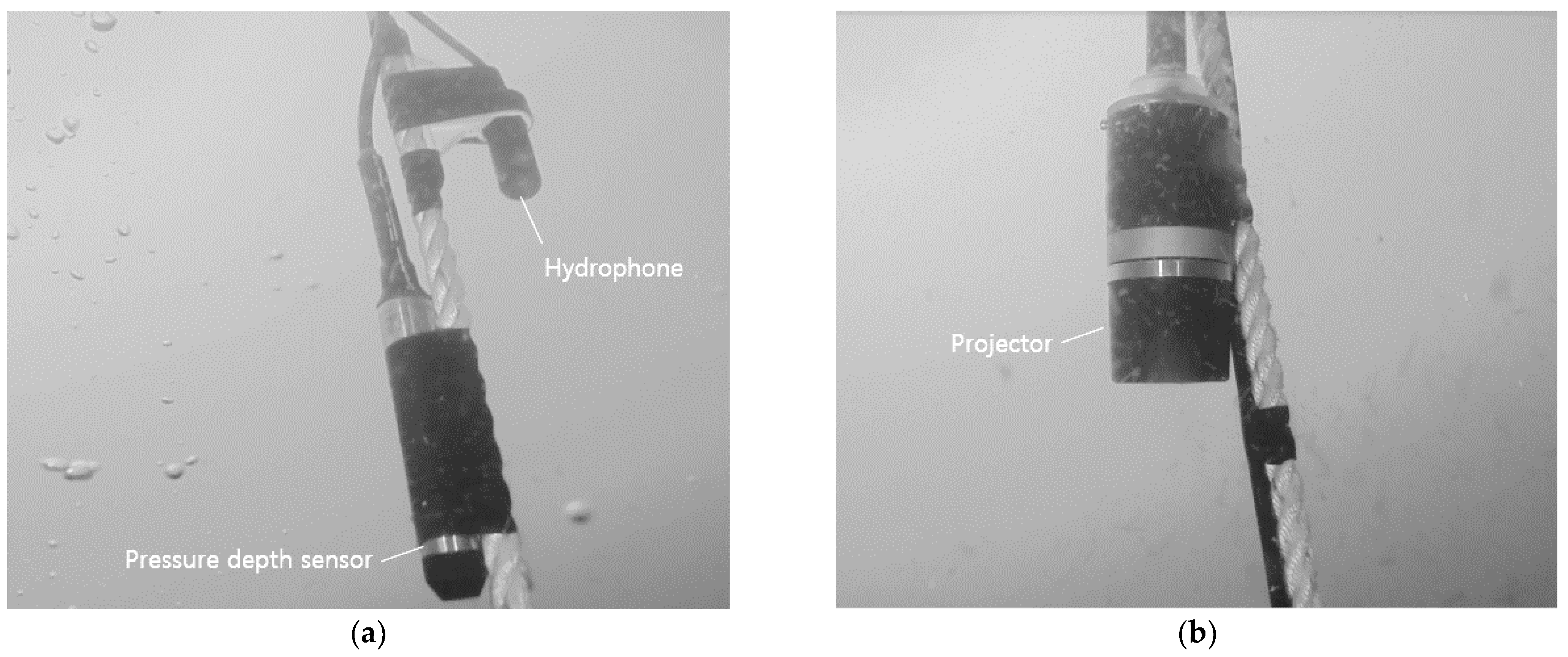
Figure 3a shows the receiver sensor (hydrophone) and pressure depth sensor mounted on the system array, and
Figure 3b illustrates the transmission sensor (projector) in the system array. The marine buoy component was deployed on a circumference with a radius of approximately 20 m, and acoustic sources were sequentially transmitted from 12 transmitters according to the start command received through RF communication. The system continuously synchronizes with a time error of ≤40 µs from the GPS information until a stop command is received. Furthermore, the protocol was configured so that the land station could verify whether the marine buoy is operating normally. The dynamic range of the measurement system was designed to satisfy ≥80 dB by considering the reflectivity of the bubble cluster, and the sampling rate was set at 120 kHz by considering the frequency of the transmission signal.
The land station sends a command to the marine buoy parts and stores the measurement data received from the marine buoy component. The land station was designed as a standalone PC with an Intel i7-1165G7 CPU and 16 GB of RAM for data collection. Additionally, an RF communication antenna was installed to communicate with the marine buoy component. For in situ quality control of the received signal, a user interface was developed for the operator.
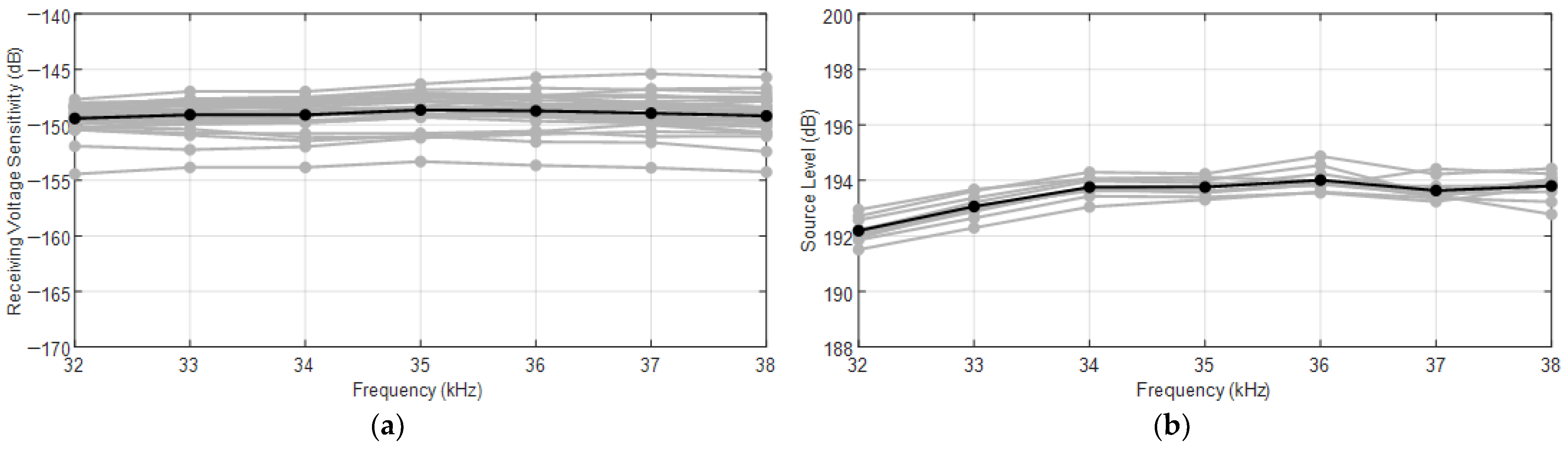
The receiving voltage sensitivities of the hydrophones and the source pressure levels of the projectors were measured in advance in an indoor water tank to confirm the performance of the acoustic sensors used in the measurement system and secure the correction data for the acoustic data. The receiving voltage sensitivities of the 30 hydrophones used in this experiment are shown with gray solid lines in
Figure 4a, where the black solid line indicates the mean values. The average receiving voltage sensitivity was −149 dB re 1 V/
pa in the center frequency band, and the difference in the sensitivity of the sensor with the largest deviation was approximately 4.8 dB. The source levels of the projectors are presented in
Figure 4b, where the mean value of 193.6 dB re 1
pa/V in the central frequency band is indicated by black dots with a black solid line, showing a difference of 0.78 dB from the sensor with the largest deviation. These results were later used to correct the amplitude of the received signals. Additionally, the responses of the frequency filter for the receiving amplifier, gain control, and crosstalk were within the design value range. Collectively, these observations validated the reliability of the developed system.
3.3. Artificial Bubble Generation
The bubble clusters measured in this study were generated using a material that generates bubbles through a chemical reaction upon contact with water, which we developed in a previous study. When developing this material, one of our priorities was to ensure that the material was harmless to the marine ecosystem. The bubble-generating material (BGM) used in this experiment was also introduced in our previous research [
10]. The BGM was precisely dropped into the center of the observation area by using a drone to avoid interfering with other acoustic signals such as radiation noise and reflection signals from the ship.
3.4. Data Measurement
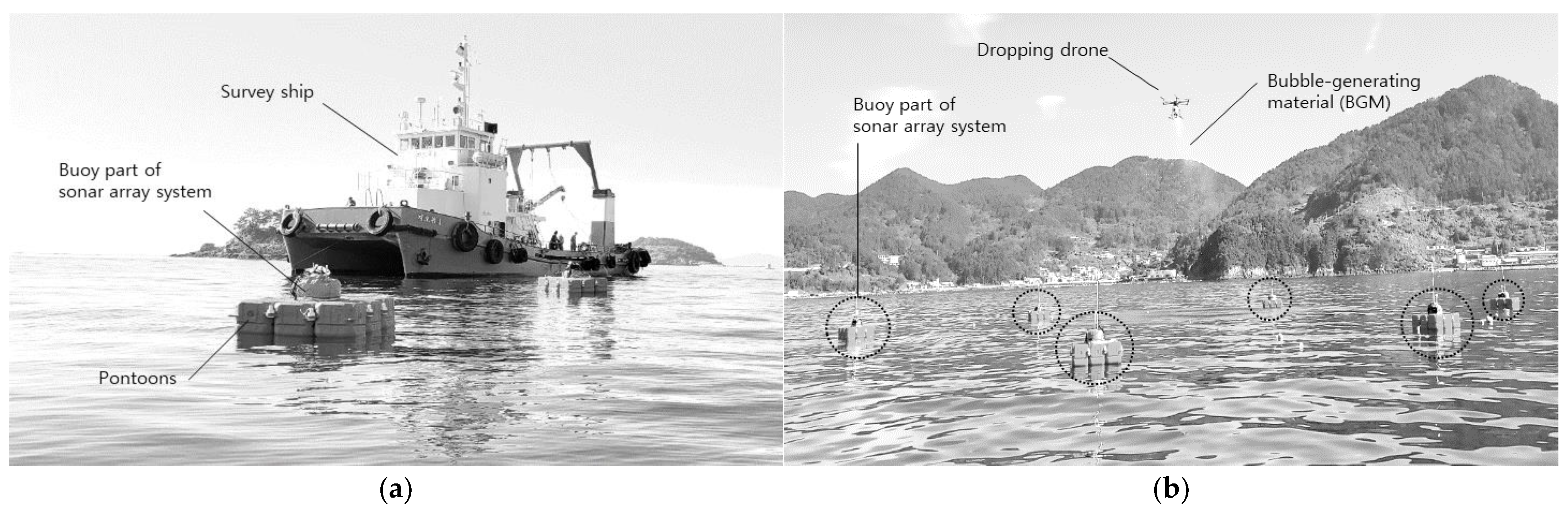
An acoustic measurement experiment was performed in November 2021 at the time of the tidal tide, when water flow is the slowest in the southern seas of the Korean Peninsula. The deployment of the marine buoy components is shown in
Figure 5a. The buoys were stably installed in the sea using eight pontoons around the buoys, which contain the electronic components. Six sets of measurement buoys were installed in a circle with a radius of 20 m at intervals of 60° to estimate the three-dimensional distribution of the bubble cluster.
The receiving sensors in the array were positioned at intervals of 2 m from a depth of 2–10 m, which was the expected distribution depth of the bubble cluster, and the transmitting sensors were positioned at 5 and 7 m. When a command for measurement was transmitted from the land station to the marine buoy components through RF communication, 12 transmitting sensors in the six sets of the measurement buoys sequentially radiated sound sources. The sound sources were designed to be as short as possible within the range where the signal could be perceived to minimize interference between signals. For this purpose, a signal in the form of a sinusoidal wave with a length of 10 wavelengths was used for the acoustic wavelet, and the pulse repetition interval (PRI) was set at 0.5 s. Therefore, all transmissions could be completed in 6 s (6 s/cycle).
Once the measurement system was confirmed to be operating normally, a drone was used to drop the BGM into the target area. During the drop, an actuator and a rotating plate were used to ensure that the BGM had an appropriate drop density to ensure that it landed evenly on the sea surface to generate sufficient bubble clusters.
Figure 5b illustrates an example of an experimental BGM dropping and the acoustic measurements. Acoustic signals emitted from 12 transmitting sensors passed through or reflected the bubble cluster in the water, after which they were recorded in 30 receiving sensors (360 ray paths). The acquired acoustic data were transmitted to the land station through RF communication, and this process was monitored in real time by an operator on the ship. An example of acoustic data obtained through the sea experiment is shown in
Figure 6, which illustrates the signal with the bubble cluster (black) in comparison with the signal without the bubble cluster (gray). As illustrated in the graph, the strong scattering signal from the bubbles was recorded between 20 and 35 ms. A total of 41,040 sound signals (360 ray paths × 114 cycles) were obtained. Changes in bubble distribution and survival time with time were analyzed by continuously observing the reflected and scattering signals for the bubble cluster from the acquired signal.
3.5. Data Preprocessing
Noises such as electrical, mechanical, and ambient noises must be suppressed to successfully estimate the distribution of bubble clusters generated by the BGM. Finite impulse response-based band-pass filtering is mainly applied to suppress noises out of the frequency band of the source. This approach is stable and efficient, but some of the frequency band components are lost, resulting in ringing artifacts. However, a Butterworth filter, which is an infinite impulse response filter, generates a minimal phase shift while the cutoff frequency remains constant for all filter orders. In this study, ambient, electrical, and mechanical noises were suppressed using a Butterworth filter during preprocessing.
Although the wave height was low and the wind was calm (
during the sea experiment, some of the acquired data were lost during data transmission through RF communication. If an imaging technique such as RTM is applied to the data with loss, the imaging result may be distorted. In turn, this limits the quantitative analysis of the bubble cluster distribution as a function of time. Liu and Sacchi [
26] proposed a method to solve this problem caused by data loss. This scheme quantitatively normalizes the signals by considering the continuity between the lost signal and the near-normal signal.
In Equation (5),
is the cost function of regularization,
is the sampling operator,
represents the restored data,
is the trade-off parameter, and
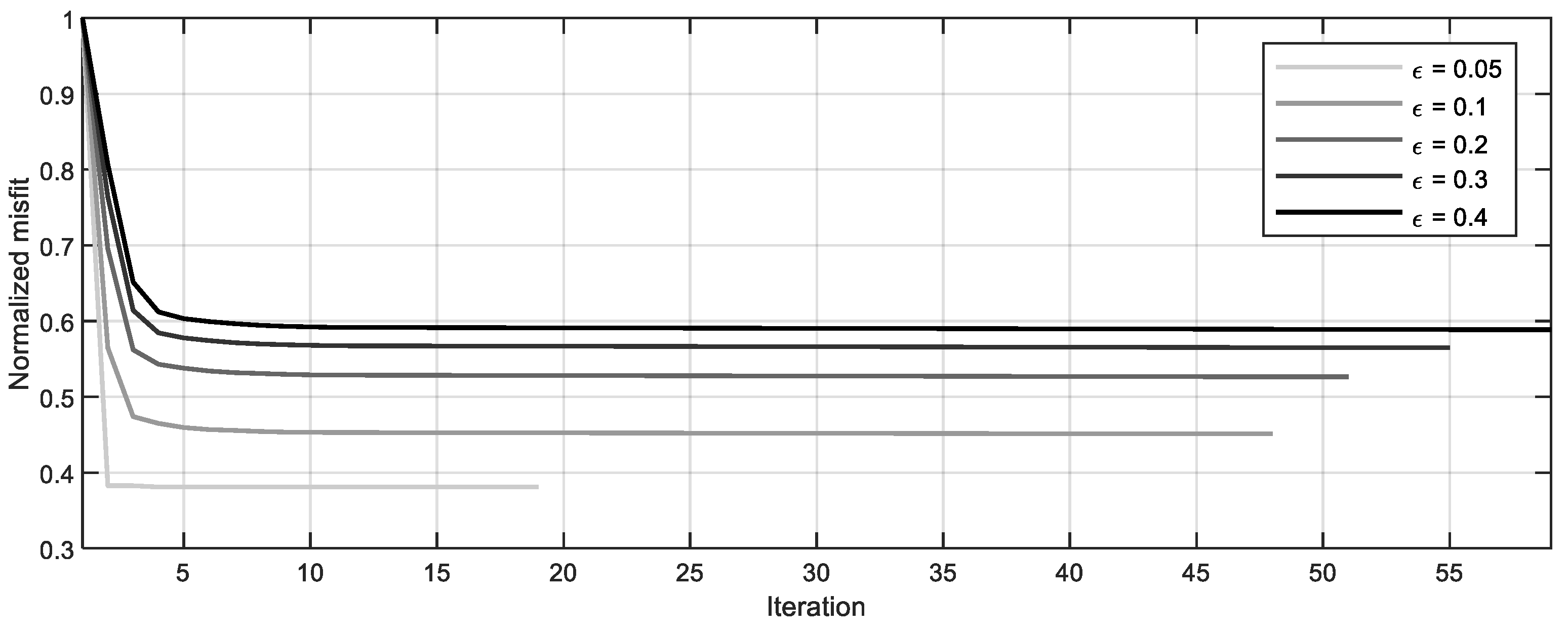
is the spatial second derivative operator. The trade-off parameter
is the dominant variable in data restoration, and as its value increases, the continuity of the generated signal improves; conversely, the discrepancy from the original data increases.
Figure 7 shows the misfit curves according to
. In each condition, the misfit curve sufficiently converged to the minimum value, and the iterative update was stopped when the misfit difference between the current step and the previous step was within 0.1%. In the graph, when the value of
is low, the error is also low, and the convergence speed is fast. However, in this case, the effect of restoring the lost data was reduced.
In this study,
was set to 0.1 to account for the data restoration and error occurrence.
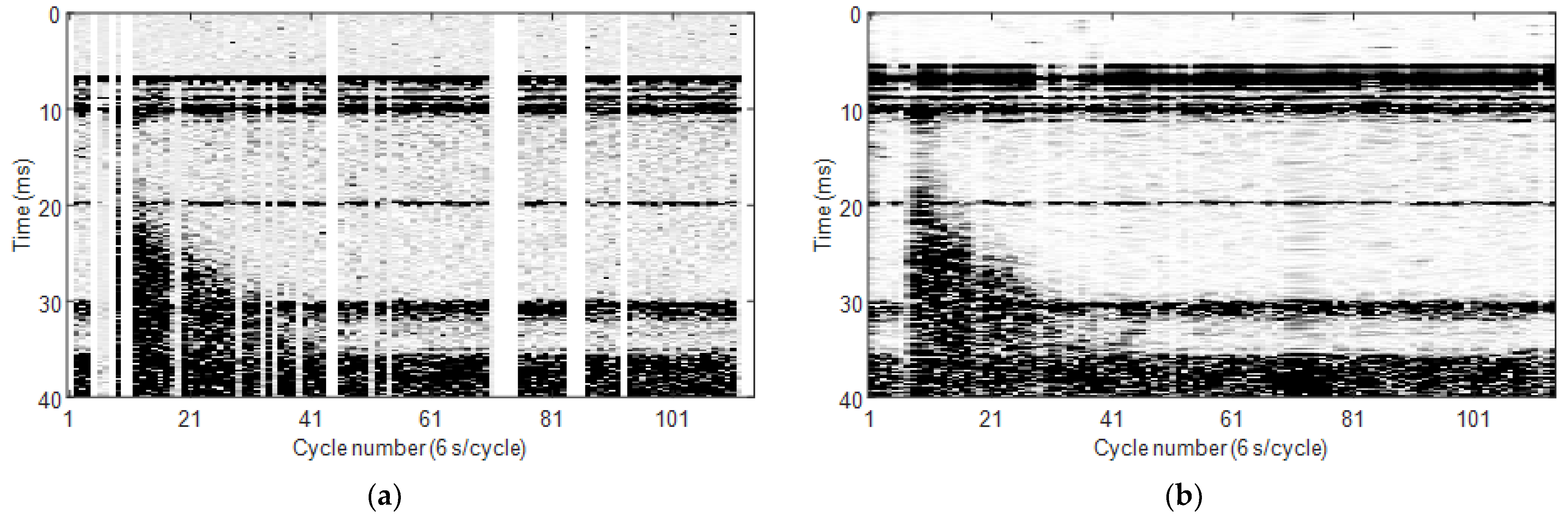
Figure 8 compares the actual measured raw data with the results after preprocessing. This cycle–time section illustrates the collection of signals recorded by the first receiver (2 m in depth) of the same buoy component from the signal transmitted by the first transmitter (5 m in depth) of the second buoy component. The horizontal axis represents the cycle number (i.e., the number of transmissions), with each cycle being 6 s long. The vertical axis represents the recording time for each transmission signal. After the backscattering signal from the bubble cluster is recognized in the 10th cycle, the signals are identified continuously for 30 cycles (180 s) until the 40th cycle. The signal loss and the background noise are significant in the raw data in
Figure 8a, whereas the signal-to-noise ratio (SNR) and data continuity are improved in the preprocessing result in
Figure 8b.
5. Conclusions
In this study, the envelope RTM approach was applied to determine the three-dimensional distribution characteristics of a bubble cluster artificially generated in a real seawater environment. A sonar array measurement system consisting of six sets of buoys was used to obtain the data. A sea experiment was designed and performed using the developed measurement system and the BGM for artificial bubble generation to obtain the acoustic reflection and scattering signals of the artificial bubble cluster near the Korean Peninsula. Preprocessing analyses including frequency filtering and regularization were applied to improve the SNR of the data.
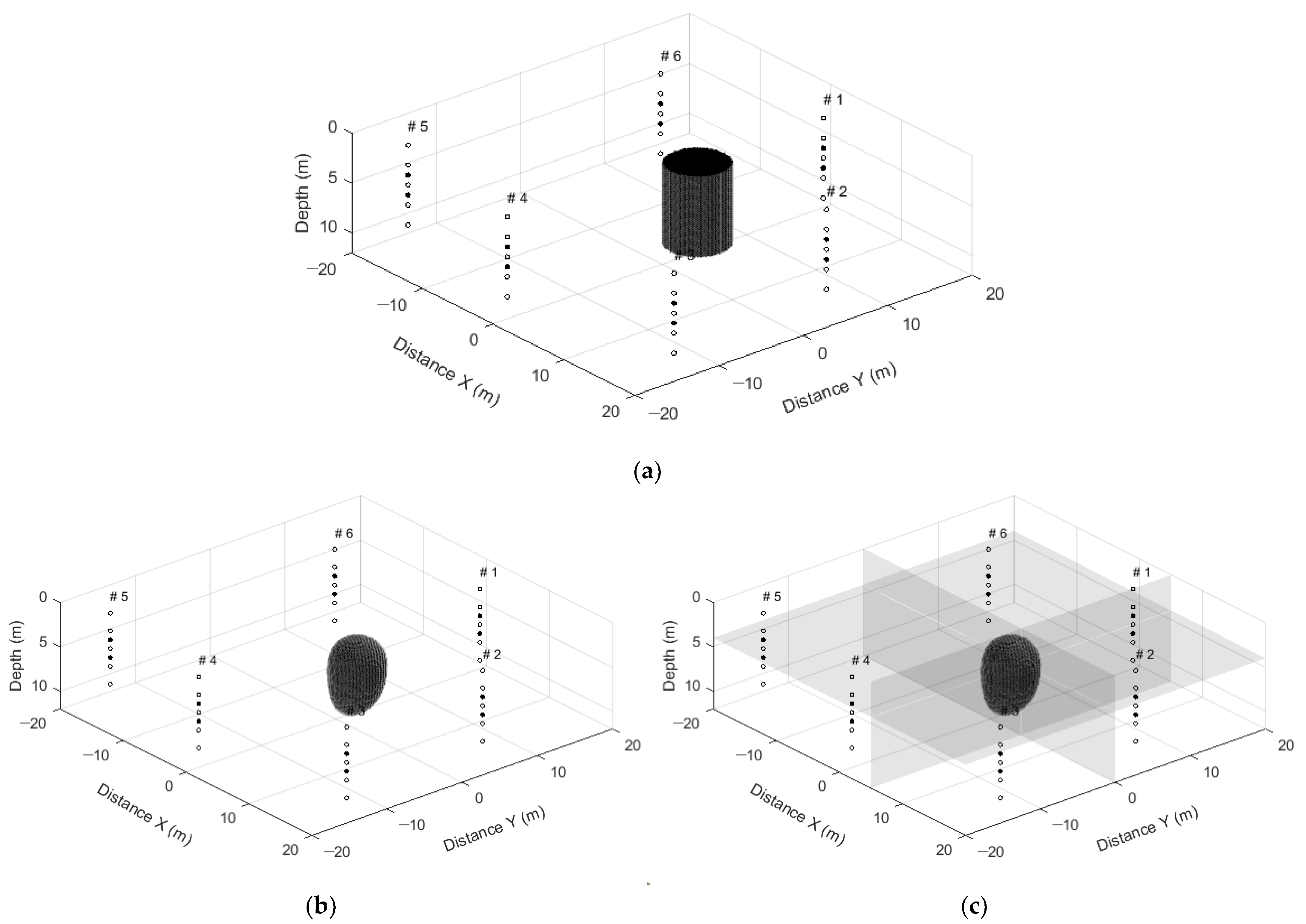
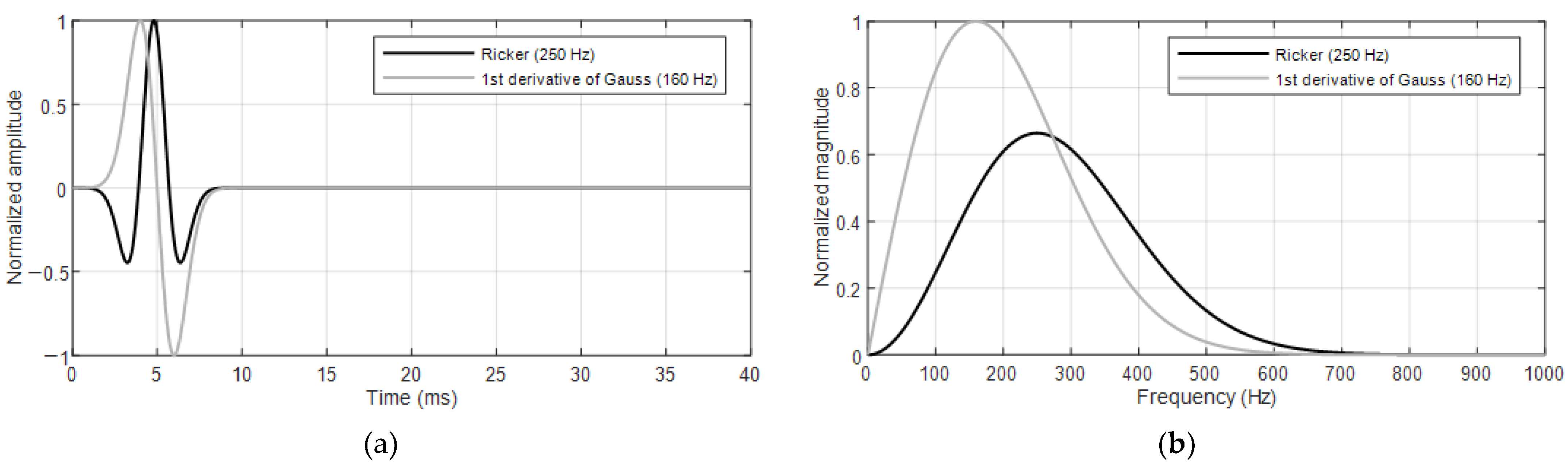
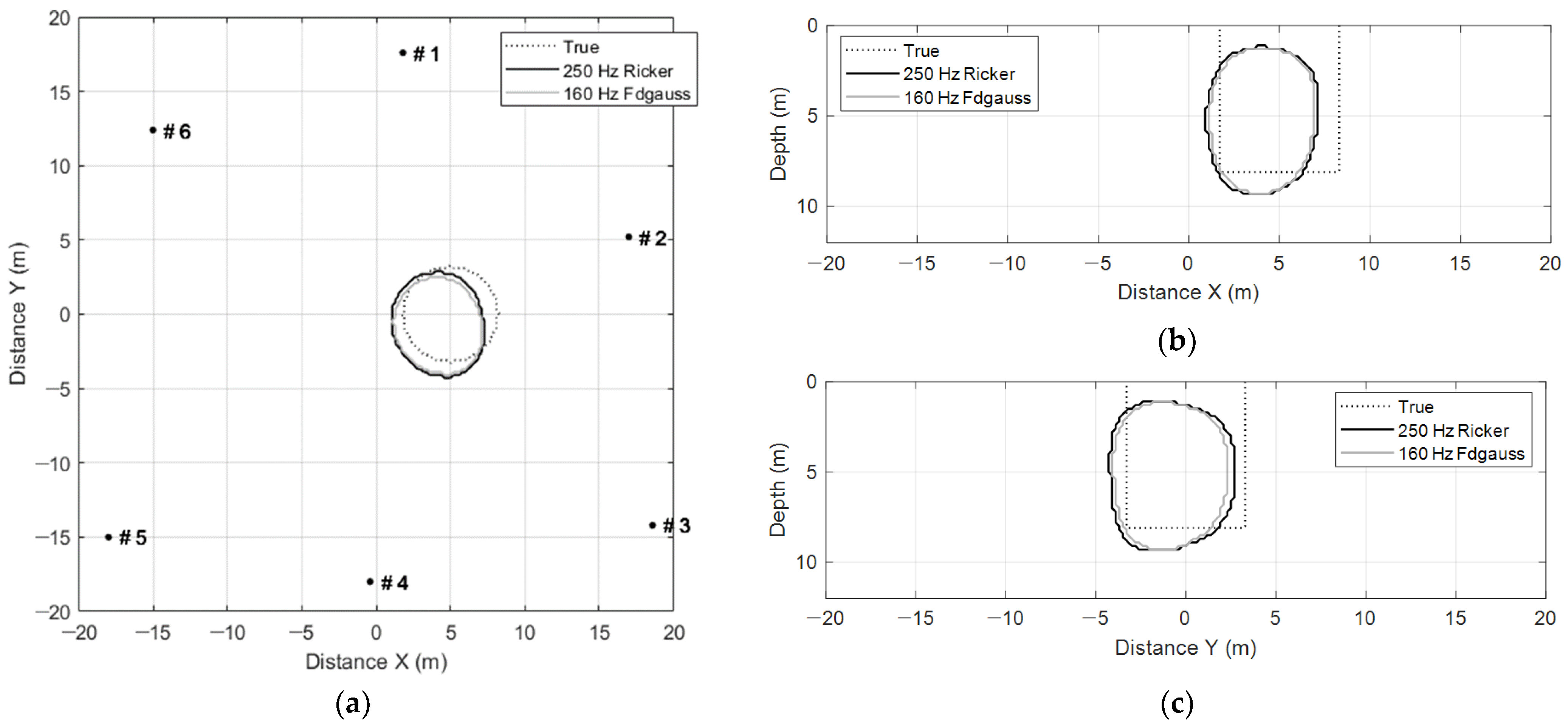
Envelope RTM was applied to the synthetic acoustic data before it was applied to marine experimental data to confirm its validity. The results showed that the boundary of the artificial bubble cluster was effectively derived from a small number of transmitters and receivers. Additionally, the boundary imaging result of the artificial bubble cluster was robust even though we used other waveforms with a lower frequency than the frequency of the source used to generate the observation data.
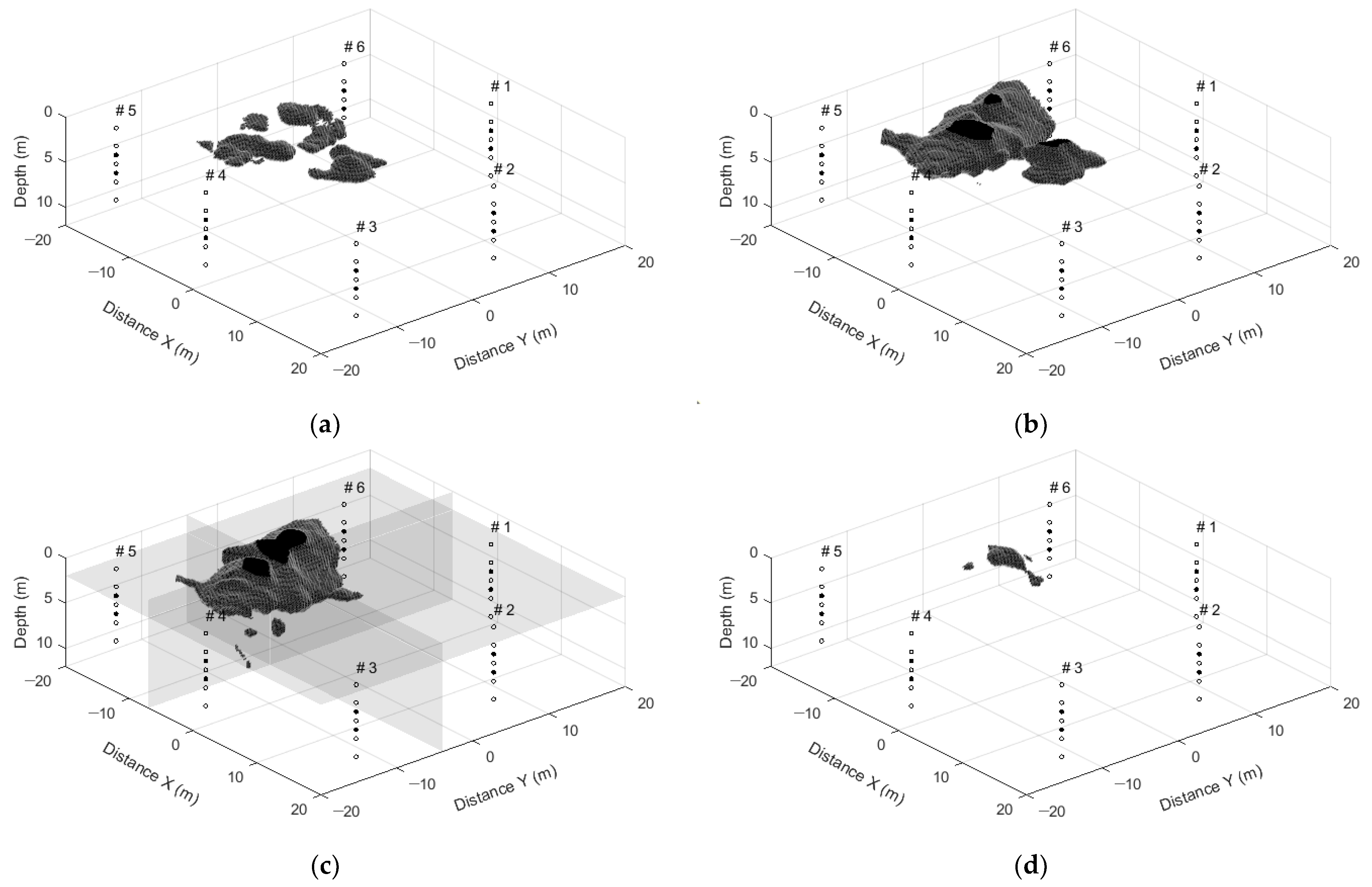
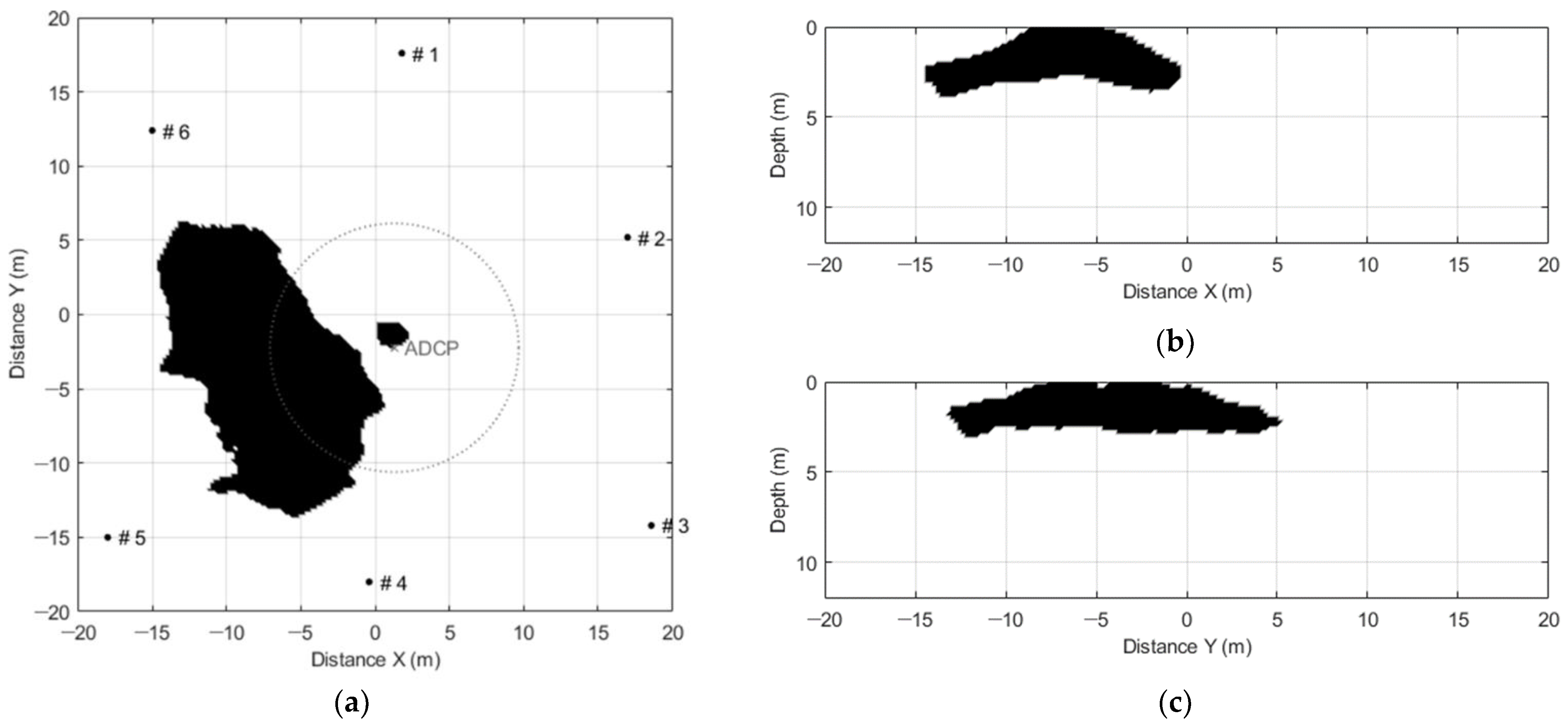
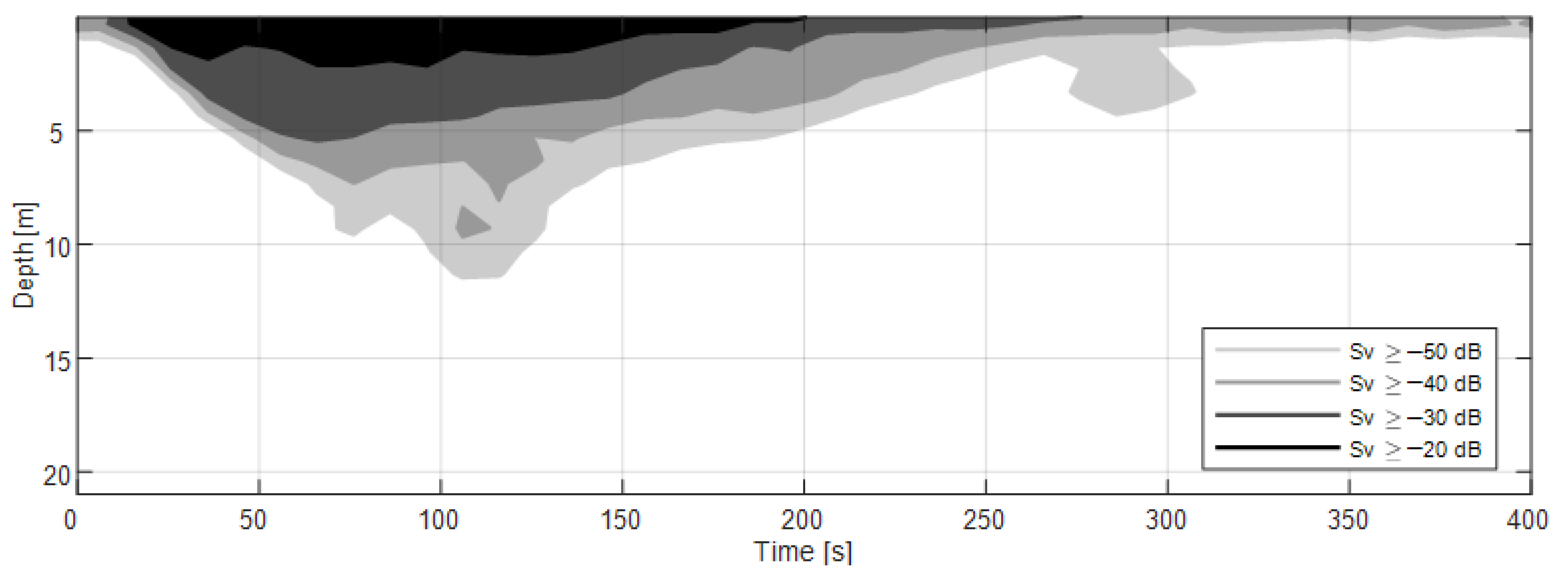
The envelope RTM method verified through synthetic data application was applied to the observed data acquired from the sea experiment. The result demonstrated that the artificial bubble cluster developed and remained strong for more than 180 s in the marine environment, after which it slowly disappeared. The development depth of the artificial bubble cluster was confirmed to be within an approximately 4 m depth. The backscattering strength of the boundary of the artificial bubble cluster imaged through the envelope RTM ranged between −30 and −20 dB in comparison with that of the ADCP data.
Quantitative analysis using marine data is quite limited because the marine environment has a large spatiotemporal variability. In this study, the quantitative analysis of bubble distribution was nearly impossible because the bubble distribution characteristics changed continuously, even during the experiment. Therefore, the quantitative analysis of the bubble distribution presented in this study had some uncertainties. However, the three-dimensional imaging of the bubble cluster in the seawater environment is available, and the reliable boundary of the bubble cluster can be identified through our proposed technique. Therefore, the technique proposed herein can be used to analyze the characteristics of air bubbles present in seawater for both civil and military purposes. Additionally, the distribution characteristics of the artificial bubble clusters estimated in this study can be used as an input value to assess the accuracy of future models focusing on military applications.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













