Cracks are prone to occurring when ocean platforms are subjected to complex environmental loads for long periods [
1,
2]. Crack propagation is defined as a dynamic process of crack growth under the action of external factors that reduces the stability of engineering structures and jeopardizes engineering safety [
3,
4]. Currently, the aging platforms that are in service have great potential security hazards due to fatigue cracks. As shown in
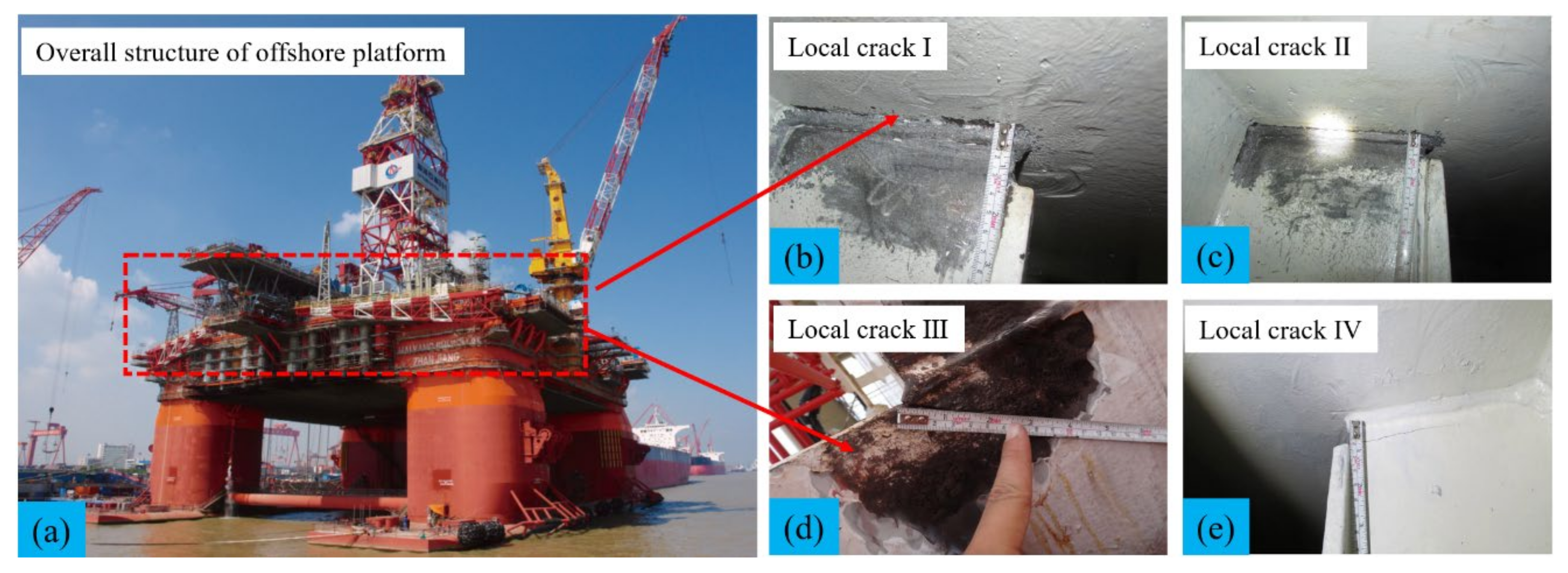
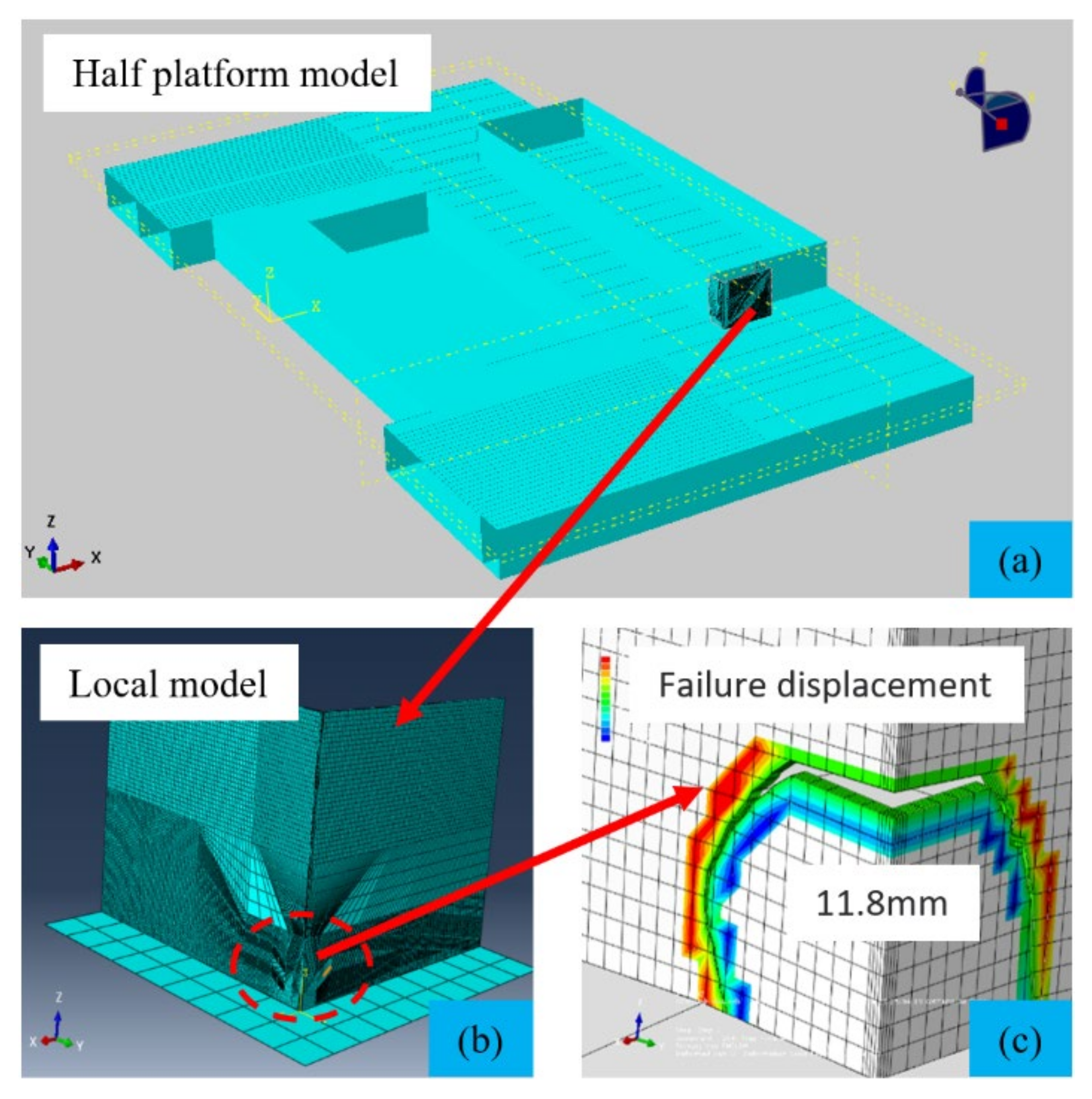
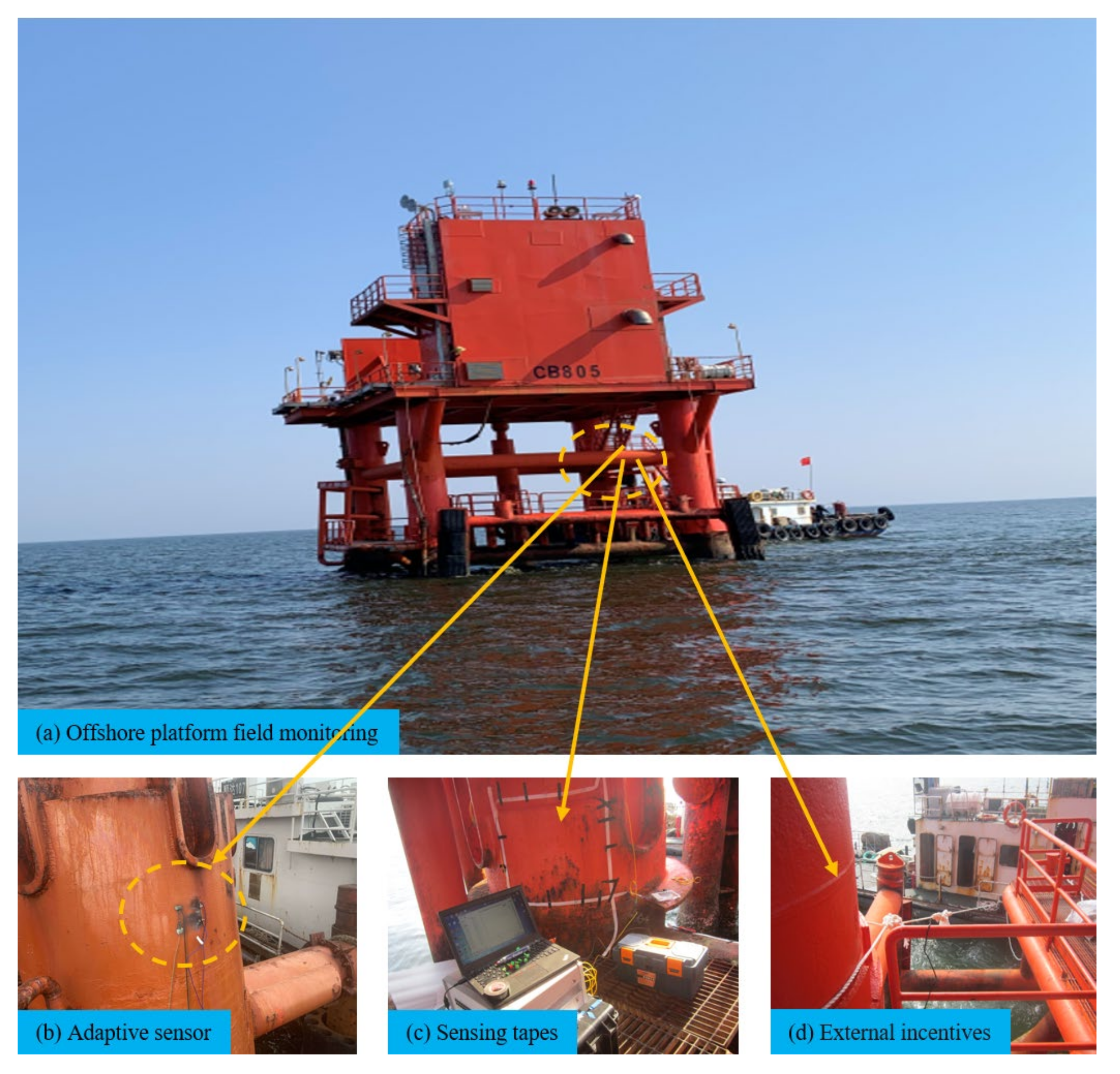
Figure 1, one platform reported that cracks were found in the connection between the added horizontal truss. The crack propagation caused buckling deformation, which reduced the bearing capacity of the vertical column connected with the middle longitudinal bulkhead joint. The cracks in the four corners of the front and rear end walls of the living building had slowly expanded compared with several years prior. The above description indicates that crack monitoring is needed to provide safety warnings and damage diagnoses for ocean platforms.
Cracks as a mechanical phenomenon cause great strain or even displacement when they propagate. Essentially, a crack can be monitored by strain or displacement measurement. With the development of science and technology, there have been increasingly more methods applied to monitor structural cracks [
7,
8,
9,
10]. The piezoelectric effect refers to the deformation of a piezoelectric body caused by an external mechanical force or electric field. Currently, piezoelectric sensors created with an inherent mechanical–electrical coupling effect are usually used in structural monitoring. Arun Narayanan [
11] used a surface-mounted lead zirconate titanate (PZT) patch to detect stress-induced damage in concrete substrates in the form of cracks. Zhang et al. [
12] proposed using piezoelectric smart aggregates to monitor and evaluate the repair quality of concrete cracks by embedding them in concrete structures based on their encapsulation properties. Acoustic emission technology refers to the technology of dynamic nondestructive testing of materials or components by receiving acoustic emission signals. Wolf et al. [
13] proposed an embedded ultrasonic sensor to detect cracks in concrete that can detect and ascertain crack propagation before it is visible on the surface of the concrete. M.U. et al. [
14] proposed a new method of semiconductor layer role shaping to achieve crack generation and detection based on acoustic emission testing. Compared with the confirmed optical detection method, the results showed that the method has good repeatability. The piezoresistive strain gauges and non-invasive optical methods [
15,
16] have also been used for structural health monitoring (SHM). Wu et al. [
17] proposed a novel and facile strategy to manufacture highly micro channel crack-based gold@PU sponge piezoresistive material, which makes these fabricated sensors capable of monitoring both tiny and large human motions. In addition, optical fiber sensing technology is widely used in structural deformation and crack monitoring due to its high precision, low loss and anti-electromagnetic interference advantages [
18,
19,
20]. Song et al. [
21] proposed a grating coated sensor for metal crack detection, and its quantitative crack detection ability was verified by fatigue crack monitoring experiments. Wan et al. [
22] applied distributed optical fiber sensing technology to mixed-mode crack monitoring. The crack opening and shear displacement were obtained at an angle greater than 90° based on the principle that the bending loss of optical fiber intersects the open crack. Han et al. [
23] proposed a short-range Brillouin optical fiber sensor that achieves early crack detection and accurate crack width measurement through a Brillouin basic analyzer. Olson et al. [
24] proposed a sensing concept based on optical fiber bending loss, obtained the relationship between signal loss and crack opening through experiments with multimode optical fiber, and established a model of power loss and crack opening. The test results were consistent with the theoretical prediction. Rodriguez et al. [
25] applied a distributed optical fiber sensor (DOFS) to the shear crack characteristics of concrete elements: monitoring, localization and quantification of shear damage. The experimental data were obtained using an optical backscatter reflectometer (OBR), and a complete crack morphology map was drawn based on its high spatial resolution and sensitivity. Ang é Lica M. [
26] applied the group delay behavior of chirped
FBG to detect and characterize cracks in materials, and determined the crack location through linear chirp. The preliminary results were in good agreement with the simulation results through experimental verification. Bernasconi et al. [
27] applied an equidistant sensor array to fatigue crack research of the bonded joint of thick composite laminates by embedding an
FBG sensor into the composite structure. Dong, L. et al. [
28] applied a tapered polymer fiber sensor (TPFS) to the crack detection testing of concrete beams, and they measured the deflection of the concrete beams with a linear variable differential sensor (LVDT). A four-point loading test was applied to several samples to evaluate the sensor’s ability to monitor the beam deflection and crack, indicating that TPFSs can be used for post-crack detection.
From the literature review, it can be seen that the monitoring techniques mentioned above have their own advantages for crack monitoring, but each method has its limitations in specific application environments. For example, noise interference should be avoided when using piezoelectric sensor and acoustic emission technology as it reduces the measurement accuracy. Due to its explosion-proof and stability advantages, fiber optic sensors can be applied to offshore platforms in environments with long-term sun exposure, salt spray, high humidity and so on. Hiroshi et al. [
29] proved through experimental analysis that the
FBG sensor can determine the crack tip location more accurately than the piezoelectric sensor and others. Offshore platforms are complex rigid structures that require high strain sensitivity for deformation monitoring. Distributed optical fiber sensing technology has a wide measurement range, but the measurement accuracy in a single point is relatively low. Currently, the difficulty with crack monitoring is that high sensitivity is needed in the micro deformation stage and a large range is needed in the failure stage for the locally critical areas of ocean platforms. Therefore, single-point measurement of high precision should be used in the key area of concern. Then, the quasi-distributed measurement is formed by concatenating multiple points around the key area to monitor structural damage.
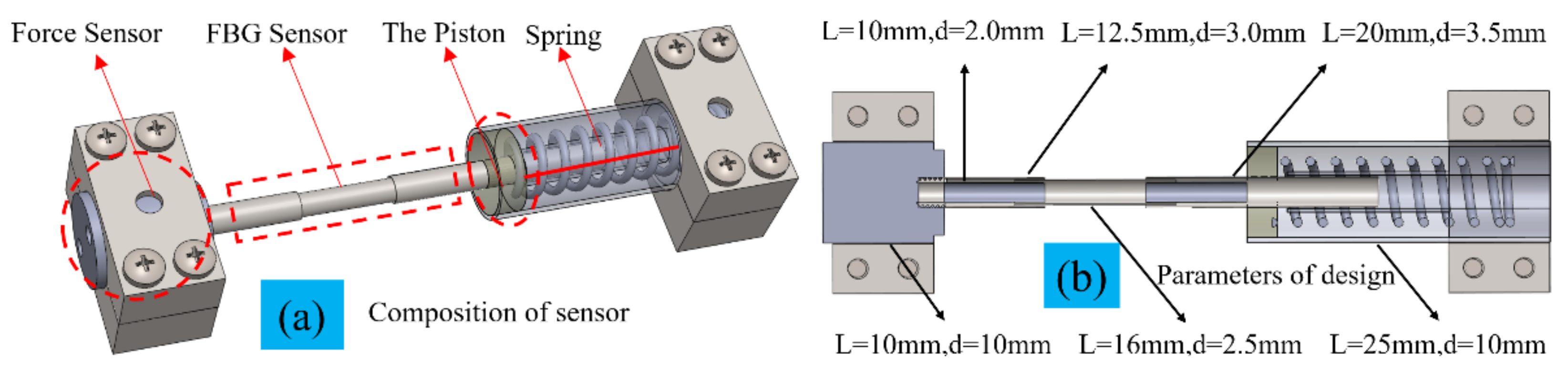
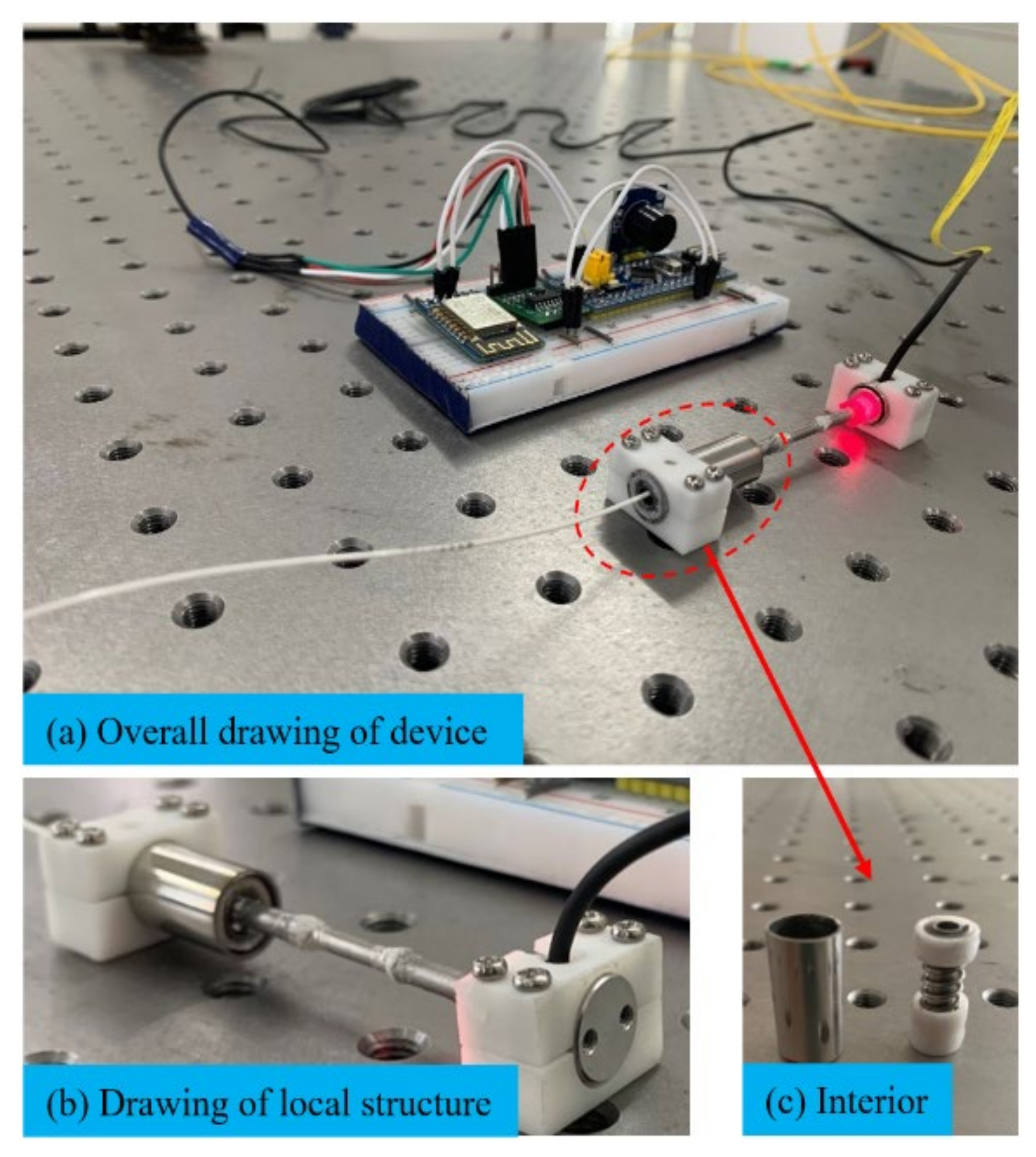
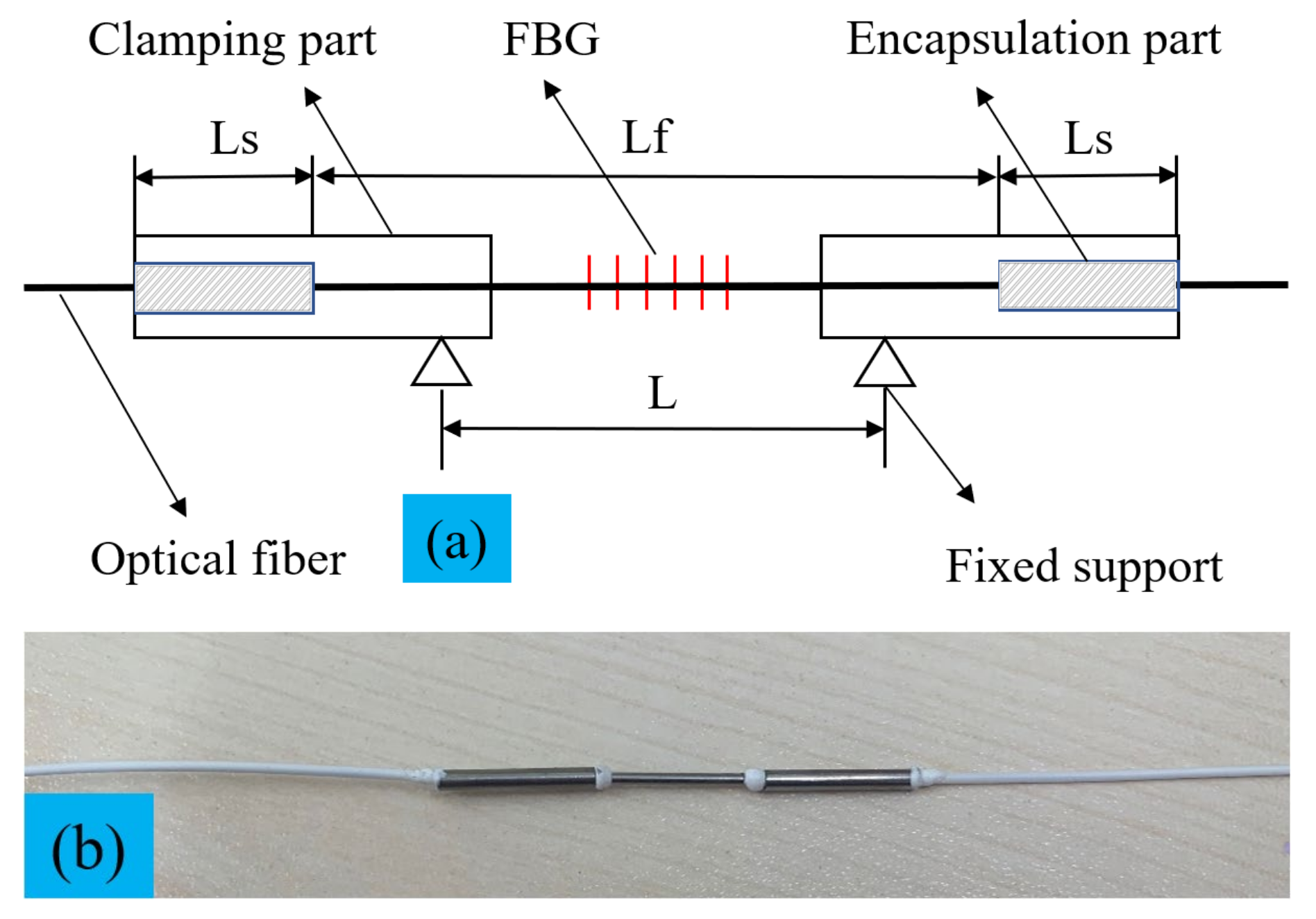
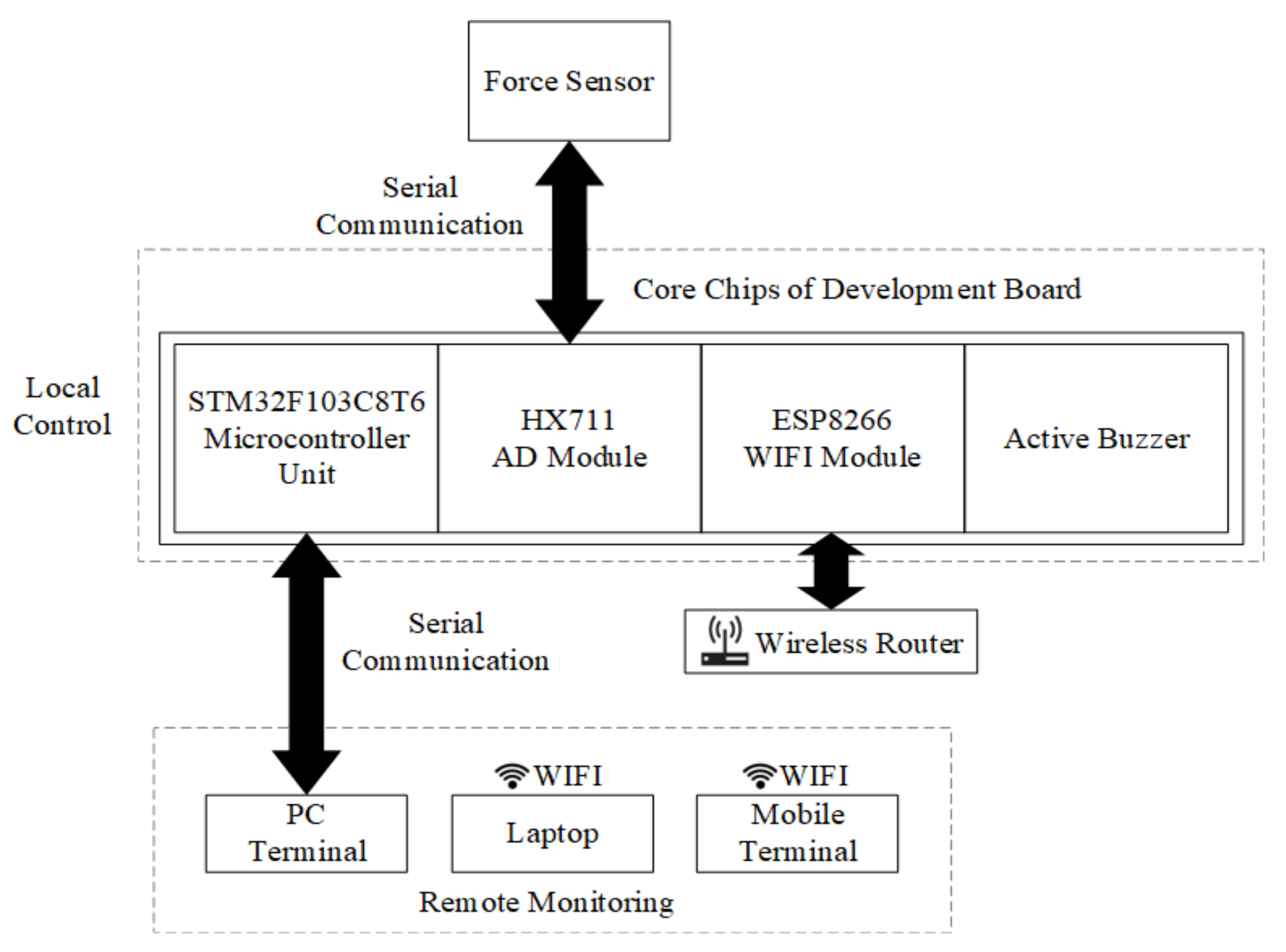
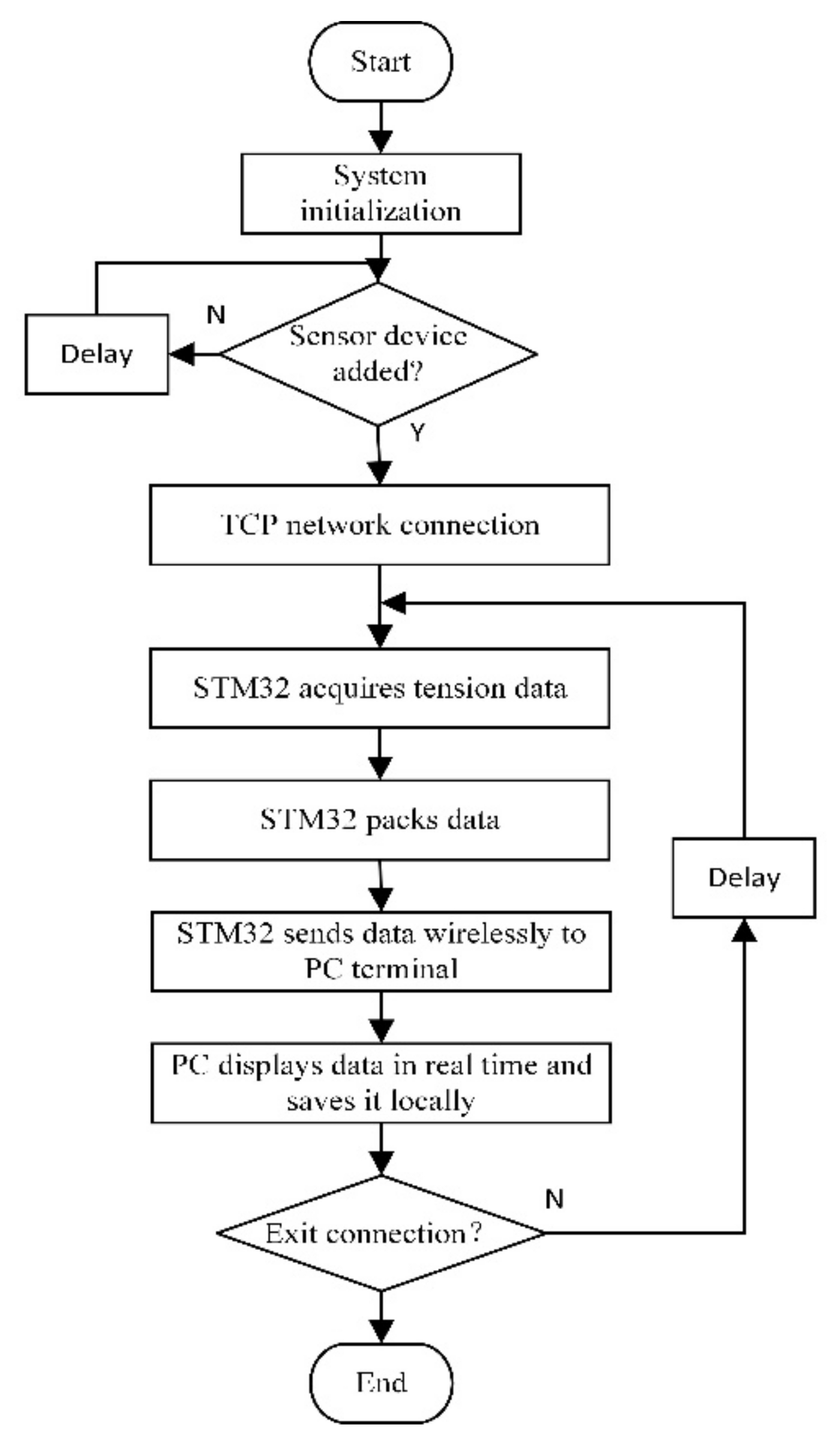
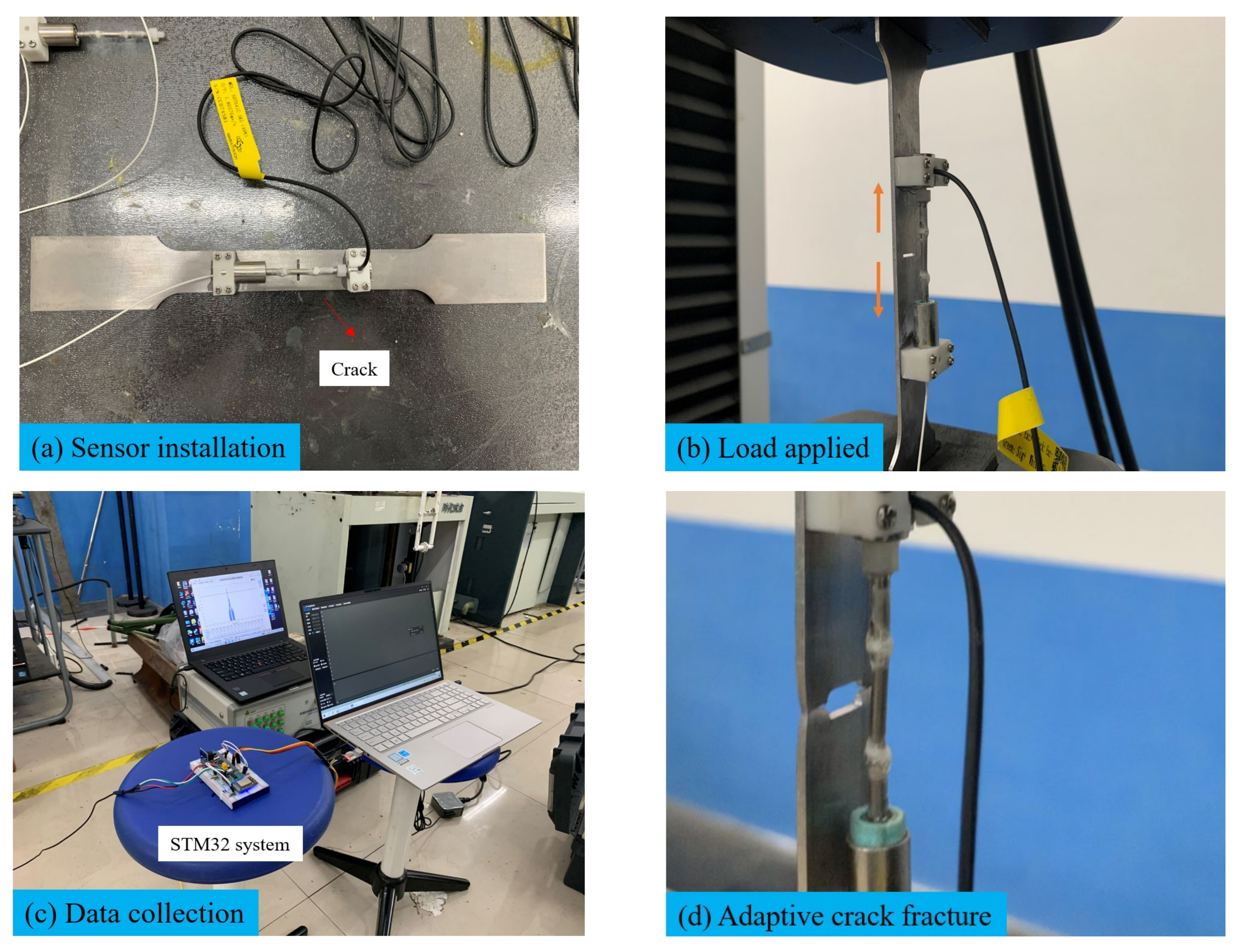
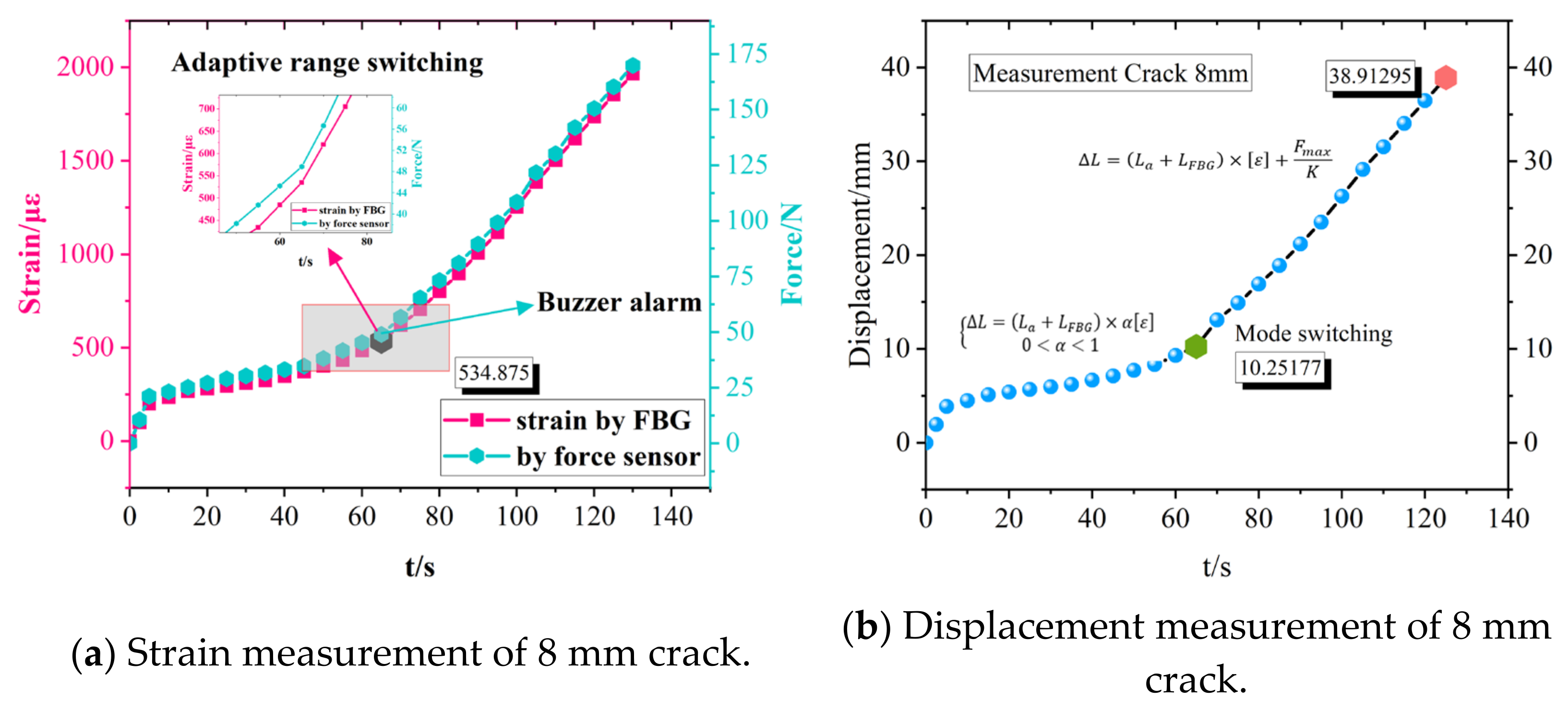
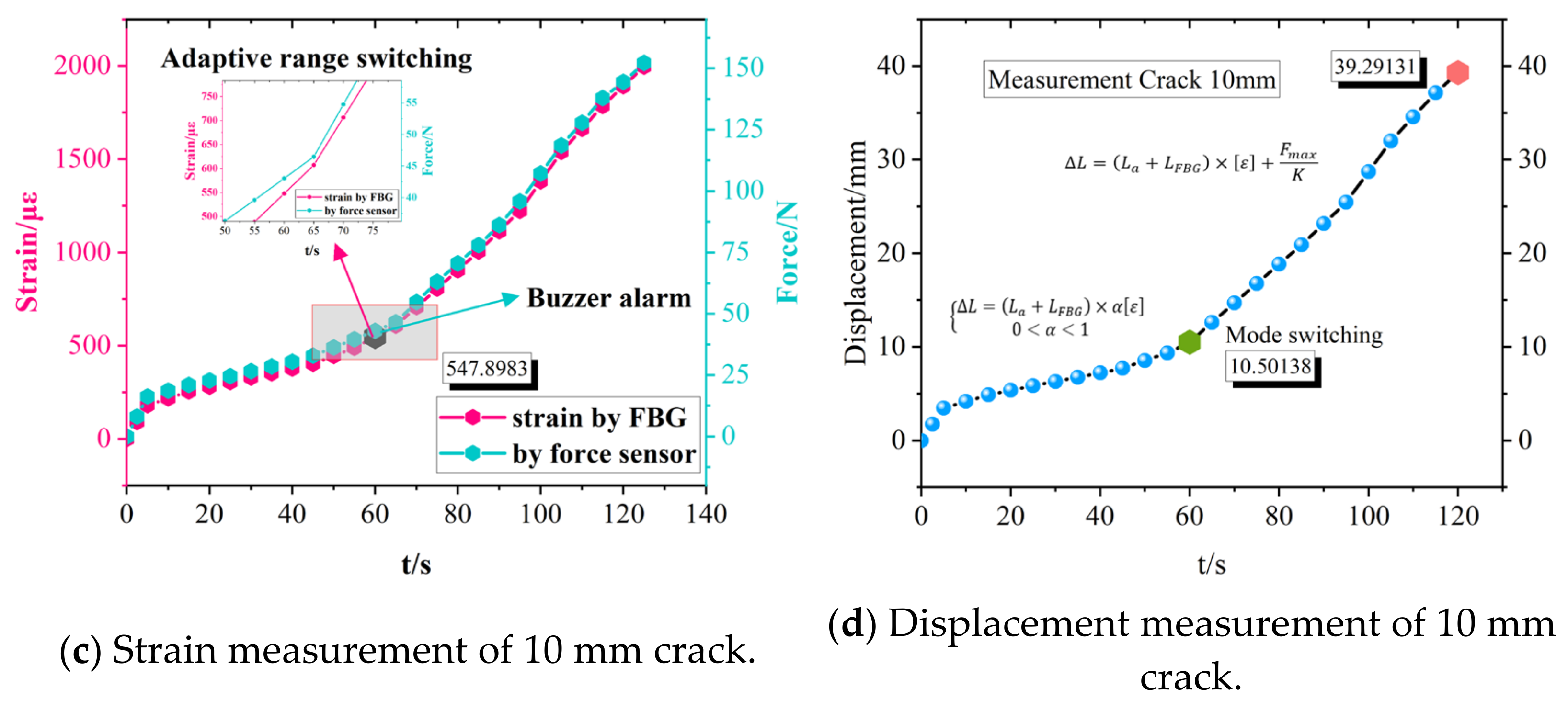
In this paper, a novel adaptive range strain sensor for structural cracks is developed to achieve crack propagation monitoring based on FBG sensing technology and by applying embedded technology. The sensor monitors the micro deformation of the structure using FBG, which has high strain sensitivity. The SCM system conducts real-time data processing and gives warnings when the displacement reaches the monitoring threshold. Both the micro deformation and the fractured displacement of the crack can be measured by the sensor in this way. The outline of this paper is as follows: first, the design and the sensing principle of the sensor are introduced. Then, the detailed packaging process of the sensor and the construction of the SCM system are presented. The ability of the sensor is then demonstrated by monitoring the standard specimens with cracks to measure the overall process of crack propagation. Finally, the adaptive range strain sensor is applied to the field measurement of an ocean platform, which verifies the feasibility of its application for crack monitoring.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}