Figure 1.
(
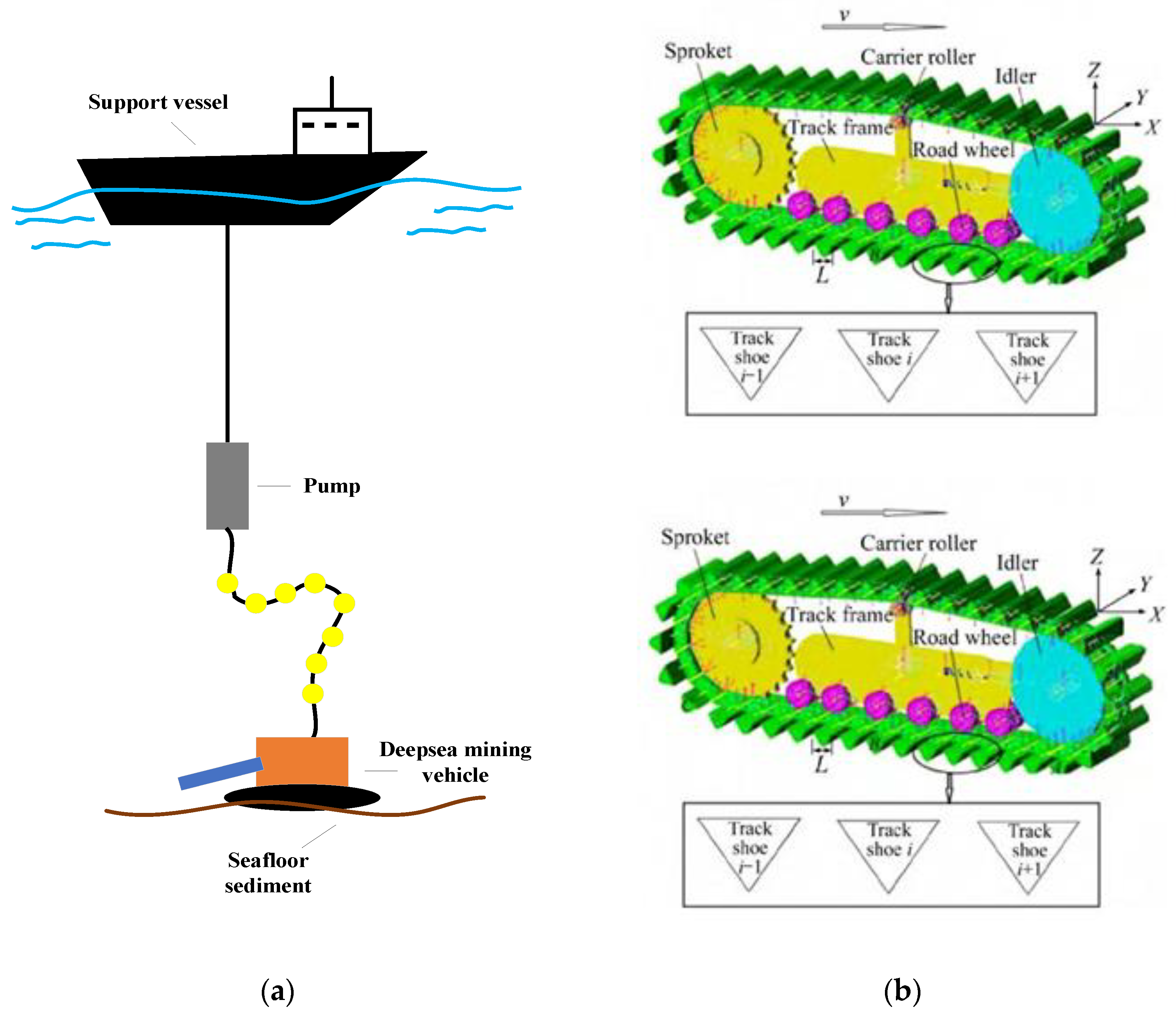
a) Schematic diagram of the deep-sea mining system, (
b) the arrangement of the grouser and the track Reprinted from Ref. [
3].
Figure 1.
(
a) Schematic diagram of the deep-sea mining system, (
b) the arrangement of the grouser and the track Reprinted from Ref. [
3].
Figure 2.
Continuum deformation using (a) Lagrangian and (b) Eulerian methods.
Figure 2.
Continuum deformation using (a) Lagrangian and (b) Eulerian methods.
Figure 3.
Structural details of “Pioneer-I” DSMV. (a) DSMV model, (b) Track mechanism, (c) Track plate model.
Figure 3.
Structural details of “Pioneer-I” DSMV. (a) DSMV model, (b) Track mechanism, (c) Track plate model.
Figure 4.
Box sampler and retrieved soil samples. (a) Box sampler, (b) In situ sample, (c) Seafloor soil, (d) Field sampling.
Figure 4.
Box sampler and retrieved soil samples. (a) Box sampler, (b) In situ sample, (c) Seafloor soil, (d) Field sampling.
Figure 5.
Laboratory test photos: (a) penetration resistance, (b) shear strength, (c) direct shear tests, (d) consolidation test.
Figure 5.
Laboratory test photos: (a) penetration resistance, (b) shear strength, (c) direct shear tests, (d) consolidation test.
Figure 6.
Overview of the numerical model of the track plate and the soil.
Figure 6.
Overview of the numerical model of the track plate and the soil.
Figure 7.
Simulation results of geostatic stress balance. (a) The soil stress distribution, (b) the soil vertical displacement distribution.
Figure 7.
Simulation results of geostatic stress balance. (a) The soil stress distribution, (b) the soil vertical displacement distribution.
Figure 8.
Three mesh seeds layout distribution.
Figure 8.
Three mesh seeds layout distribution.
Figure 9.
Sensitivity analysis results of each mesh seed. (a) Zone-1, (b) Zone-2, (c) Zone-3.
Figure 9.
Sensitivity analysis results of each mesh seed. (a) Zone-1, (b) Zone-2, (c) Zone-3.
Figure 10.
Overall track plate-soil simulation model. (a) Overall model, (b) partial view of track plate, (c) side view of track plate.
Figure 10.
Overall track plate-soil simulation model. (a) Overall model, (b) partial view of track plate, (c) side view of track plate.
Figure 11.
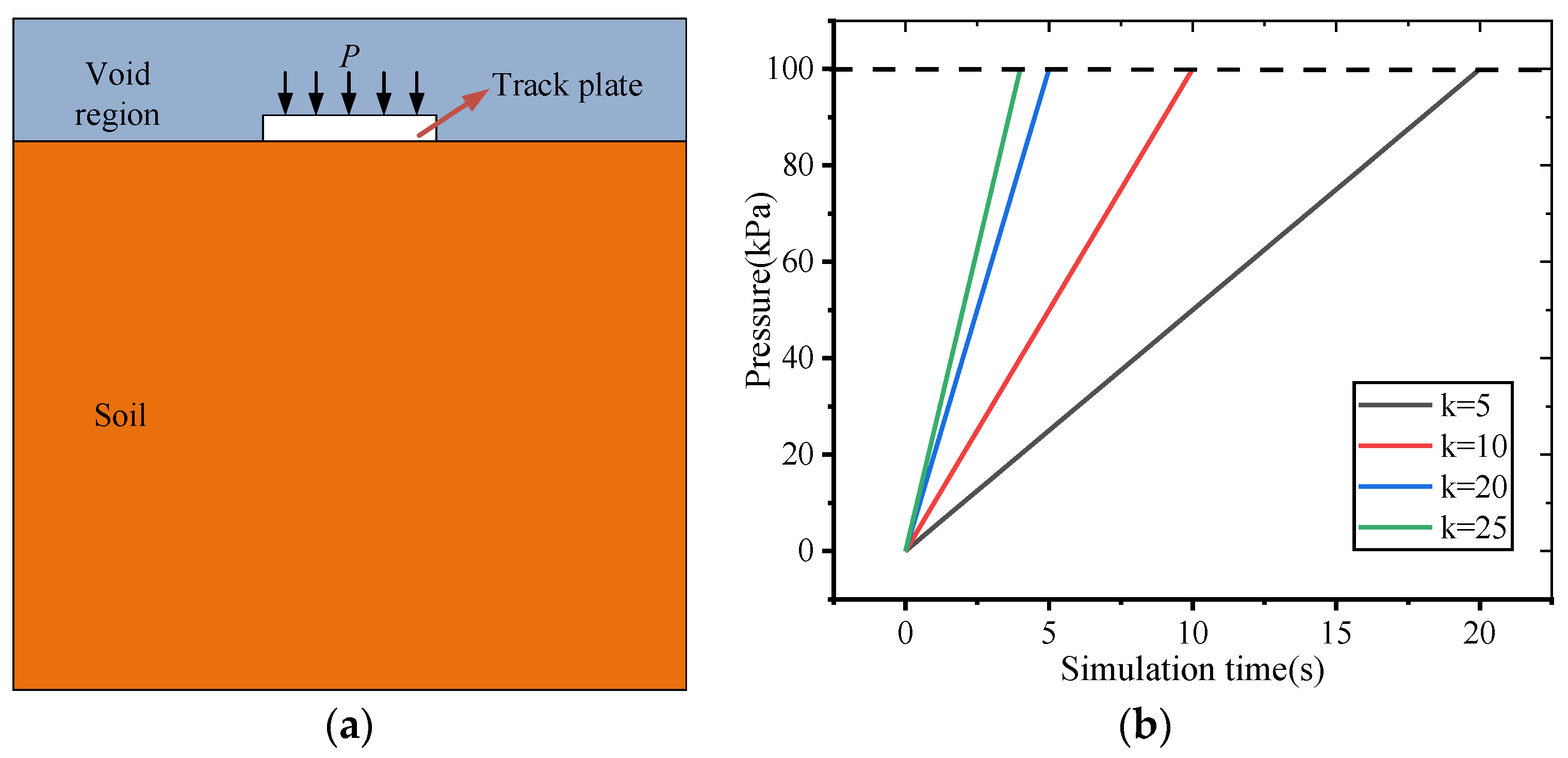
(a) Schematic diagram of numerical simulation and (b) the curve of pressure loading with time.
Figure 11.
(a) Schematic diagram of numerical simulation and (b) the curve of pressure loading with time.
Figure 12.
(a) Pressure-sinkage curve and (b) the maximum displacement variation curve with k.
Figure 12.
(a) Pressure-sinkage curve and (b) the maximum displacement variation curve with k.
Figure 13.
Comparison between the numerical simulation (
a) Simulation results, and the plate sinkage test, (
b) test results [
18].
Figure 13.
Comparison between the numerical simulation (
a) Simulation results, and the plate sinkage test, (
b) test results [
18].
Figure 14.
(a) Schematic diagram of numerical simulation and (b) curve of different velocities.
Figure 14.
(a) Schematic diagram of numerical simulation and (b) curve of different velocities.
Figure 15.
Variation curves of resistance with displacement at different velocities.
Figure 15.
Variation curves of resistance with displacement at different velocities.
Figure 16.
Schematic diagram of the track plate L and B.
Figure 16.
Schematic diagram of the track plate L and B.
Figure 17.
(a) Pressure-sinkage curves and (b) maximum sinkage under different conditions at 100 kPa case.
Figure 17.
(a) Pressure-sinkage curves and (b) maximum sinkage under different conditions at 100 kPa case.
Figure 18.
(a) Comparison between pressure and S/B and (b) Maximum S/B comparison under different L/B ratios at 100 kPa case.
Figure 18.
(a) Comparison between pressure and S/B and (b) Maximum S/B comparison under different L/B ratios at 100 kPa case.
Figure 19.
Schematic diagram of the rectangle plate and the circle plate.
Figure 19.
Schematic diagram of the rectangle plate and the circle plate.
Figure 20.
(a) Comparison of maximum displacements under different L/B ratios and (b) pressure-sinkage curves when L/B = 6 and 8.
Figure 20.
(a) Comparison of maximum displacements under different L/B ratios and (b) pressure-sinkage curves when L/B = 6 and 8.
Figure 21.
Pressure-sinkage curves of different circular plate diameters.
Figure 21.
Pressure-sinkage curves of different circular plate diameters.
Figure 22.
(a) Pressure-sinkage curves of different circular plate diameters and (b) maximum sinkage comparison at 100 kPa case.
Figure 22.
(a) Pressure-sinkage curves of different circular plate diameters and (b) maximum sinkage comparison at 100 kPa case.
Figure 23.
(a) Pressure-sinkage curves and (b) maximum sinkage at different grousers at 100 kPa case.
Figure 23.
(a) Pressure-sinkage curves and (b) maximum sinkage at different grousers at 100 kPa case.
Figure 24.
Pressure-sinkage curves of different grouser shapes.
Figure 24.
Pressure-sinkage curves of different grouser shapes.
Figure 25.
(a) Pressure-sinkage curves of different soil height and (b) maximum sinkage comparison at 100 kPa case.
Figure 25.
(a) Pressure-sinkage curves of different soil height and (b) maximum sinkage comparison at 100 kPa case.
Figure 26.
(a) Pressure-sinkage curves of different IFA and (b) maximum sinkage comparison at 100 kPa case.
Figure 26.
(a) Pressure-sinkage curves of different IFA and (b) maximum sinkage comparison at 100 kPa case.
Figure 27.
(a) Pressure-sinkage curves of different cohesion and (b) maximum sinkage comparison at 100 kPa case.
Figure 27.
(a) Pressure-sinkage curves of different cohesion and (b) maximum sinkage comparison at 100 kPa case.
Figure 28.
(a) Pressure-sinkage curves of different modulus of elasticity and (b) maximum sinkage comparison at 100 kPa case.
Figure 28.
(a) Pressure-sinkage curves of different modulus of elasticity and (b) maximum sinkage comparison at 100 kPa case.
Figure 29.
Physical and mechanical parameters change curve with depth. (a) Density, (b) IFA, (c) cohesion.
Figure 29.
Physical and mechanical parameters change curve with depth. (a) Density, (b) IFA, (c) cohesion.
Figure 30.
The pressure-sinkage curves of different physical and mechanical properties with soil depth.
Figure 30.
The pressure-sinkage curves of different physical and mechanical properties with soil depth.
Figure 31.
Comparison of the flow chart between (a) Lagrangian and (b) Eulerian heterogeneous soil establishment.
Figure 31.
Comparison of the flow chart between (a) Lagrangian and (b) Eulerian heterogeneous soil establishment.
Figure 32.
(a) The soil material distribution and (b) the density distribution.
Figure 32.
(a) The soil material distribution and (b) the density distribution.
Figure 33.
(a) Pressure-sinkage curves under different conditions and (b) curve under the heterogeneous soil conditions.
Figure 33.
(a) Pressure-sinkage curves under different conditions and (b) curve under the heterogeneous soil conditions.
Figure 34.
Soil stress contours of three soil types.
Figure 34.
Soil stress contours of three soil types.
Table 1.
Summary of pressure–sinkage models in the literature.
Table 1.
Summary of pressure–sinkage models in the literature.
| Year | Reference | Pressure–Sinkage Model | Classification |
|---|
| 1885 | Boussinesq Reprinted from Ref. [5] | | Analytical models |
| 1944 | Terzaghi Reprinted from Ref. [6] | |
| 1987 | Ageikin Reprinted from Refs. [7,8] | |
| 1913 | Bernstein Reprinted from Ref. [9] | | Empirical
models |
| 1959 | Saakyan Reprinted from Ref. [10] | |
| 1963 | Tsytovich Reprinted from Ref. [11] | |
| 1965 | E. Hegedus Reprinted from Ref. [12] | |
| 1967 | Onafeko and Reece Reprinted from Ref. [13] | |
| 1969 | Bekker Reprinted from Ref. [14] | |
| 1982 | Youssef and Ali Reprinted from Ref. [15] | |
| 1982 | Wong et al.Reprinted from Ref. [16] | |
| 1985 | M. A. Sargana et al.Reprinted from Ref. [17] | |
| 2006 | Gotteland and BenoitReprinted from Ref. [18] | |
| 2010 | Lyasko Reprinted from Ref. [19] | |
Table 2.
DSMV and track structural parameters.
Table 2.
DSMV and track structural parameters.
| DSMV Structural Parameters | Track Structural Parameters |
|---|
| Length × width × height | 5 m × 2.5 m × 2.1 m | Length × width × height | 3.26 m × 2.5 m × 2.1 m |
| Vehicle weight | In air ≈ 9.5 t;
In water ≈ 6 t | Track width | 0.6 m |
| Ground specific pressure | 15 kPa | Track ground area | 4 m2 |
| Velocity | 0.5 m/s | Chassis bearing capacity | 8 t |
| Maximum climbing capability | 15° | Track spacing | 1.3 m |
| Working water depth | 3000 m | Chassis weight | 2 t |
Table 3.
Physical properties of the seafloor soil.
Table 3.
Physical properties of the seafloor soil.
| Depth (cm) | Moisture Content (%) | Wet Density
(g/cm3) | Dry Density
(g/cm3) | Natural Porosity Ratio | Saturation | IL |
|---|
| 0–15 | 153.2 | 1.26 | 0.50 | 4.426 | 0.935 | 6.05 |
| 15–30 | 125.3 | 1.34 | 0.59 | 3.540 | 0.956 | 4.73 |
| 30–45 | 96.4 | 1.44 | 0.73 | 2.683 | 0.97 | 3.40 |
Table 4.
The seafloor composition.
Table 4.
The seafloor composition.
| Depth (cm) | Sand (%) | Silt (%) | Clay (%) |
|---|
| 0–15 | 7.782 | 73.163 | 19.054 |
| 15–30 | 7.411 | 69.891 | 22.698 |
| 30–43 | 7.889 | 69.103 | 23.008 |
Table 5.
Main mechanical properties of soil.
Table 5.
Main mechanical properties of soil.
| Property | Measurement Data |
|---|
| Shear strength | 2–5 kPa |
| Compression modulus | 1.5–1.7 MPa |
| Penetration resistance | 20–110 kPa |
| Cohesion | Average 9 kPa |
| Internal friction angle | 2.2–5° |
Table 6.
Physical and mechanical characteristics of the soil model.
Table 6.
Physical and mechanical characteristics of the soil model.
| Density | Cohesion | Internal Friction Angle | Friction
Coefficient | Elastic
Modulus | Poisson’s Ratio |
|---|
| 1400 kg/m3 | 5 kPa | 5° | 0.3 | 2.5 MPa | 0.49 |
Table 7.
Mesh sensitivity parameter setting.
Table 7.
Mesh sensitivity parameter setting.
| Mesh Zone Number | Mesh Seed Values (m) |
|---|
| Zone-1 | 0.02 | 0.03 | 0.04 | 0.05 | 0.1 |
| Zone-2 | 0.02 | 0.03 | 0.04 | 0.05 | 0.1 |
| Zone-3 | 0.02 | 0.03 | 0.04 | 0.05 | 0.1 |
Table 8.
The mesh seed value.
Table 8.
The mesh seed value.
| Zone-1 | Zone-2 | Zone-3 |
|---|
| 0.03 m | 0.1 m | 0.03 m |
Table 9.
Comparison of numerical calculation and prediction formula for maximum displacement of L/B = 5 and 10.
Table 9.
Comparison of numerical calculation and prediction formula for maximum displacement of L/B = 5 and 10.
| L/B Ratio | 5 | 10 |
|---|
| Equation calculation | Maximum sinkage 0.343 m | Maximum sinkage 0.138 m |
| Numerical calculation | Maximum sinkage 0.35 m | Maximum sinkage 0.13 m |
| The percentage error | 2.04% | 5.8% |
Table 10.
Different grouser types and numbers setting.
Table 11.
Different grouser types and value setting.
Table 11.
Different grouser types and value setting.
| The Study Parameter | Value |
|---|
| Internal friction angle (°) | 3 | 5 | 10 | 15 | 20 | 25 | 30 |
| Cohesion (kPa) | 5 | 10 | 15 | 20 | 30 | - | - |
| Elastic modulus (Mpa) | 20 | 70 | 120 | 180 | 240 | - | - |
Table 12.
Soil parameters as a function of depth.
Table 12.
Soil parameters as a function of depth.
| Project | Function | Functional Form |
|---|
| Density-1 | | |
| Density-2 | |
| IFA-1 | |
| IFA-2 | |
| Cohesion-1 | |
| Cohesion-2 | |
| Density-3 | | |
| IFA-3 | |
| Cohesion-3 | |
| Density-4 | | |
| Density-5 | |
| IFA-4 | |
| IFA-5 | |
| Cohesion-4 | |
| Cohesion-5 | |
Table 13.
Working condition name and corresponding physical and mechanical parameters label.
Table 13.
Working condition name and corresponding physical and mechanical parameters label.
| Project | Density | IFA | Cohesion |
|---|
| Nolinear-1 | Density-1 | IFA-1 | Cohesion-1 |
| Nolinear-2 | Density-2 | IFA-2 | Cohesion-2 |
| linear | Density-3 | IFA-3 | Cohesion-3 |
| Nolinear-3 | Density-4 | IFA-4 | Cohesion-4 |
| Nolinear-4 | Density-5 | IFA-5 | Cohesion-5 |


 ,
, 

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




