
Numerical Simulation Research on the Anchor Last Deployment of Marine Submersible Buoy System Based on VOF Method


Abstract
:1. Introduction
2. Numerical Methods
2.1. Free Surface Model
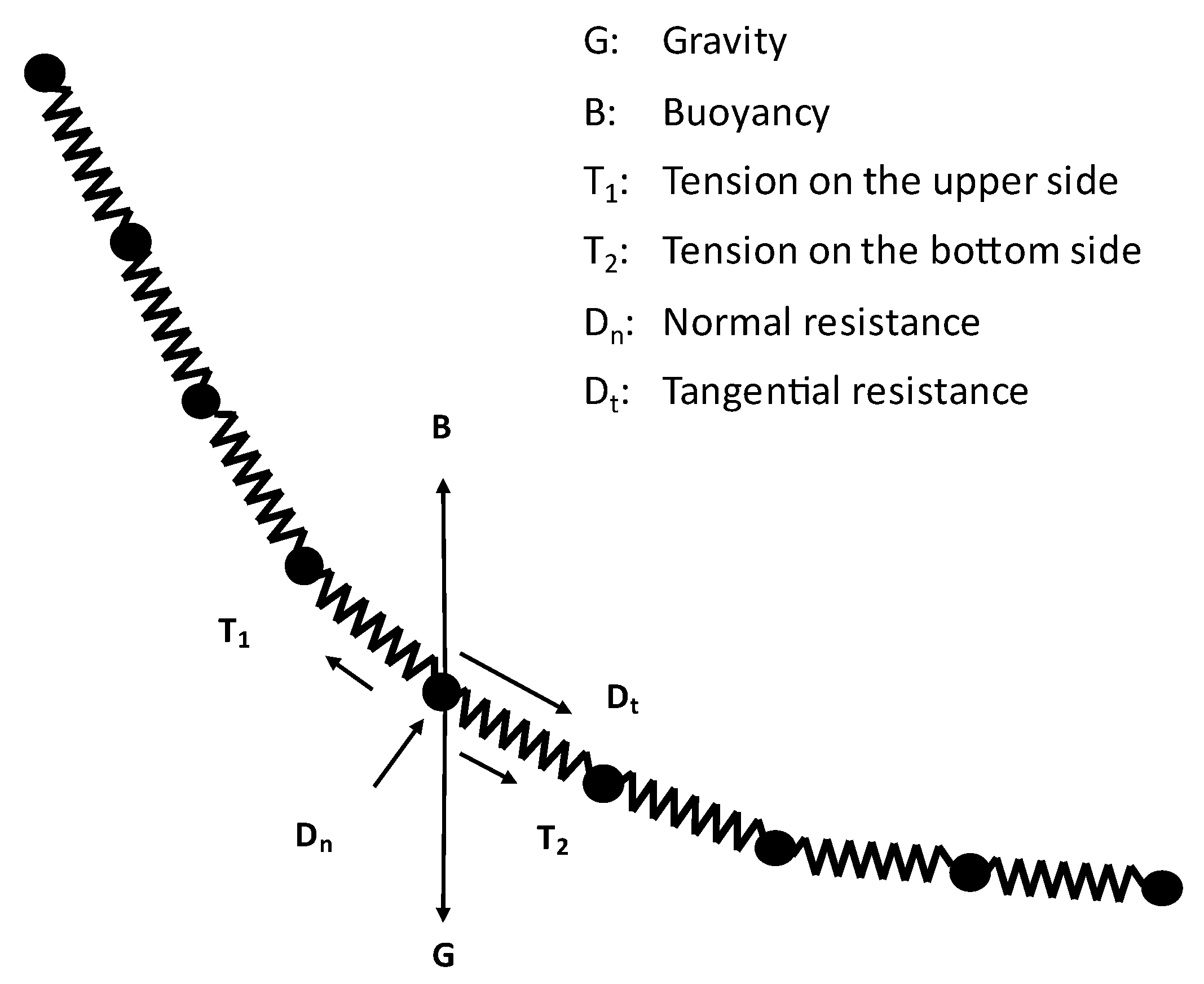
2.2. Mooring Line and Power Supply Cable Model
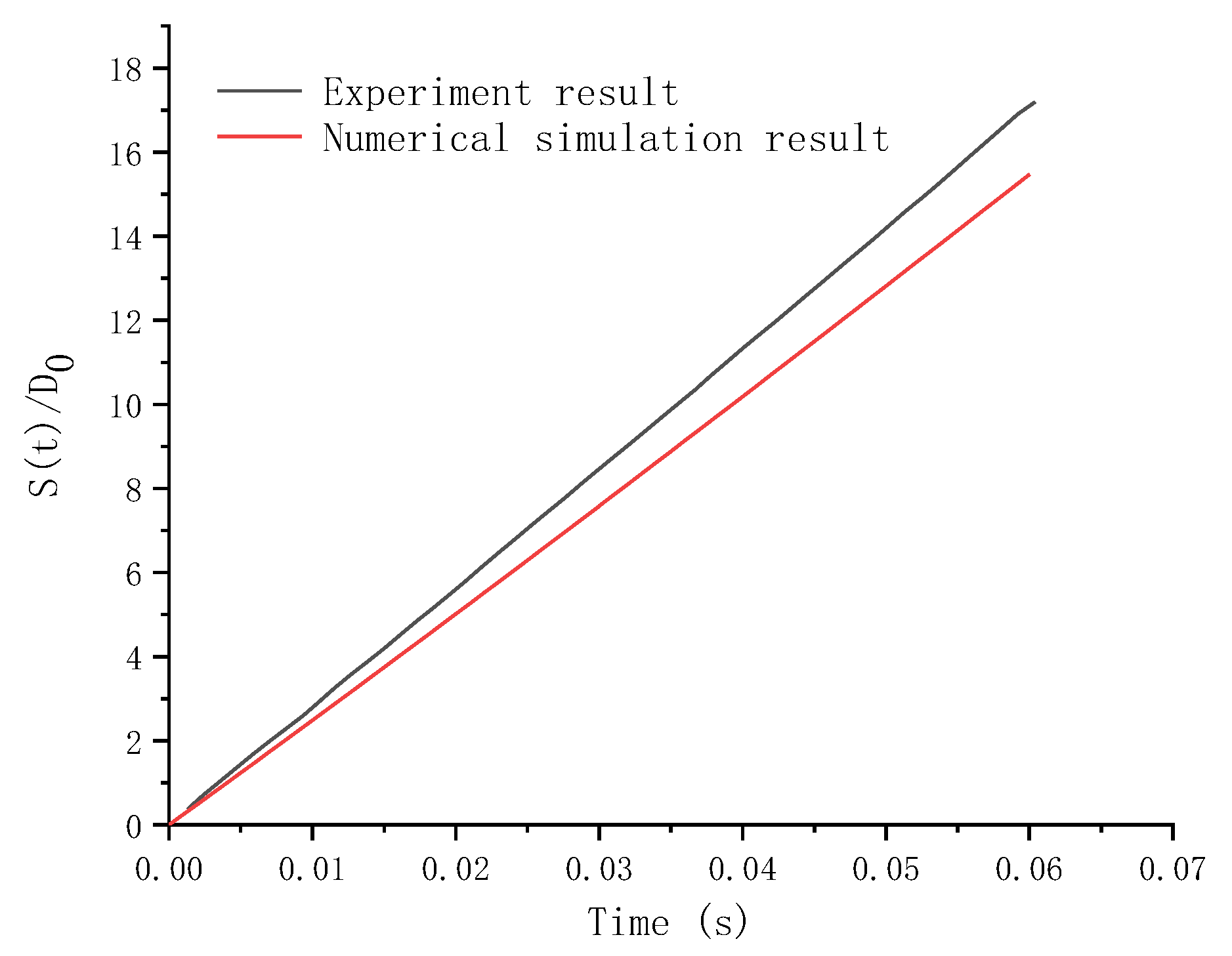
3. Numerical Method Verification
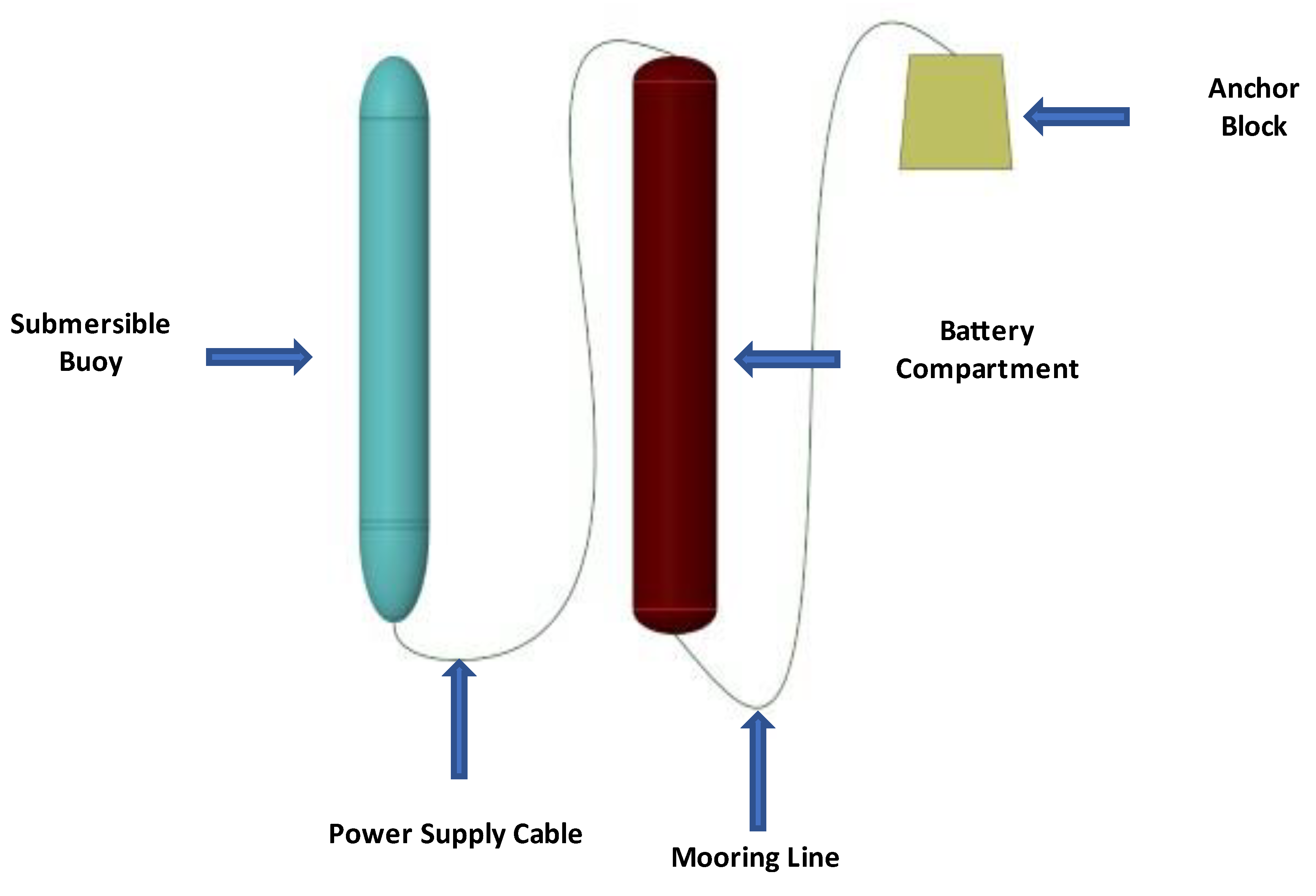
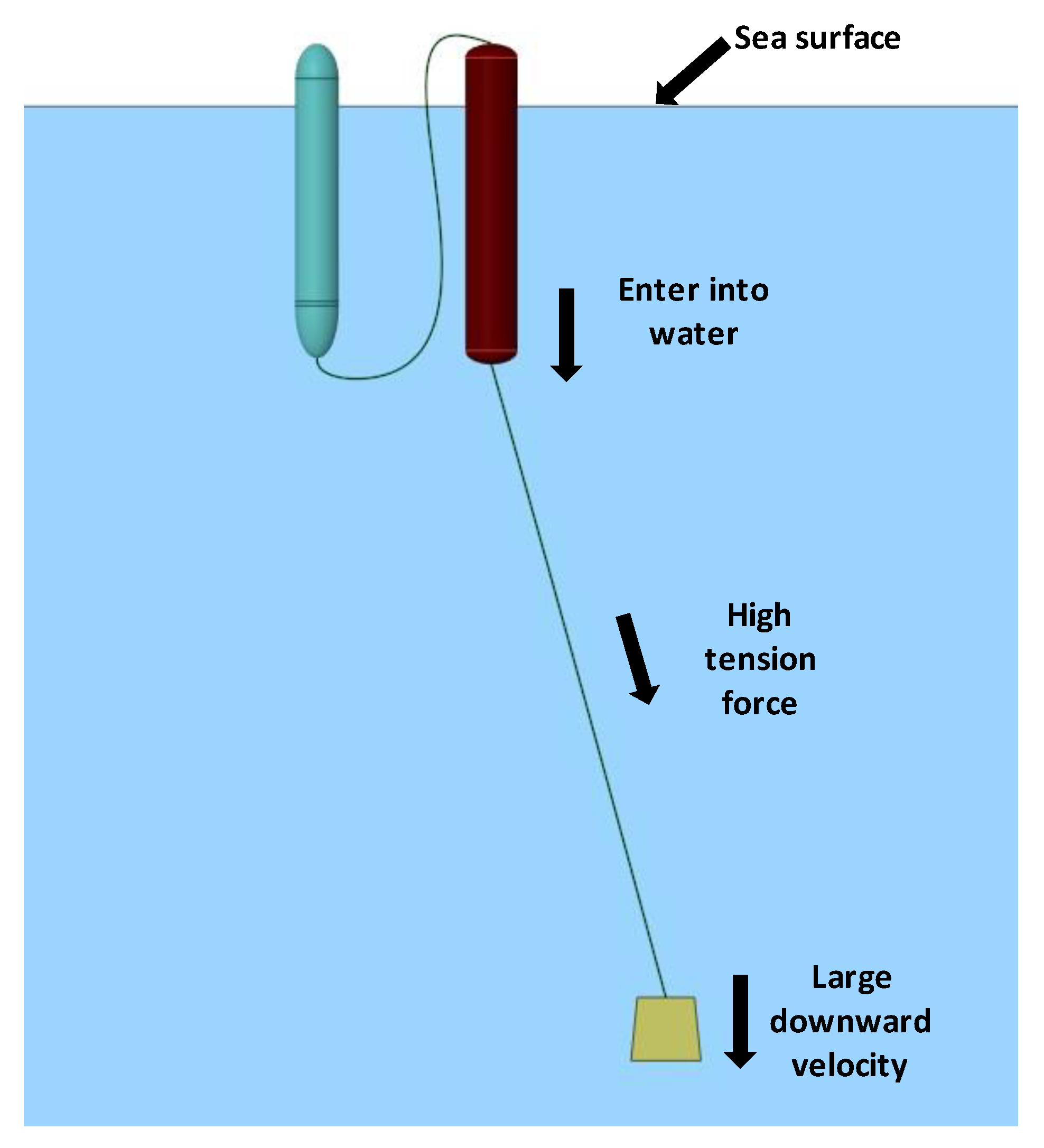
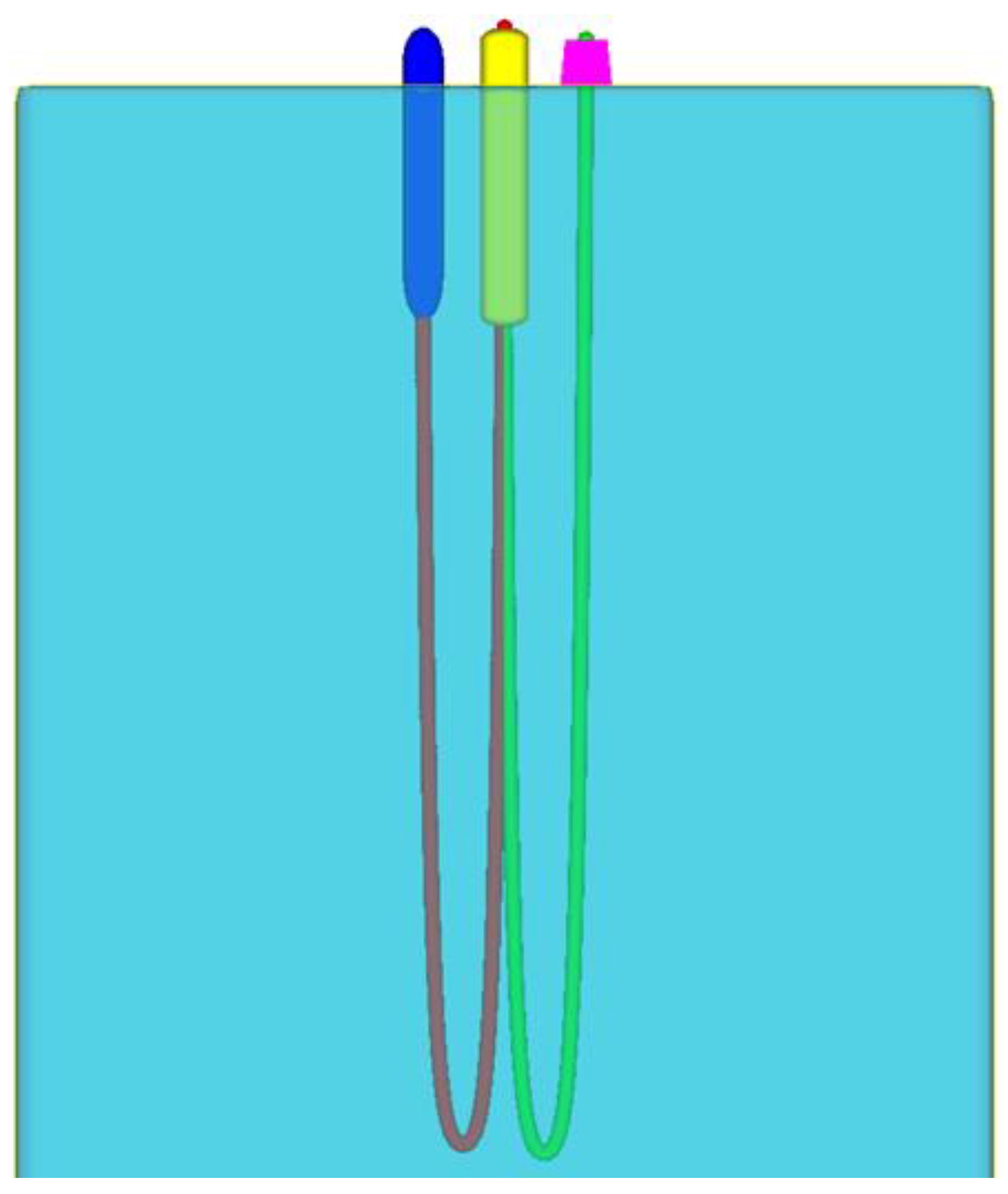
4. Calculation Model
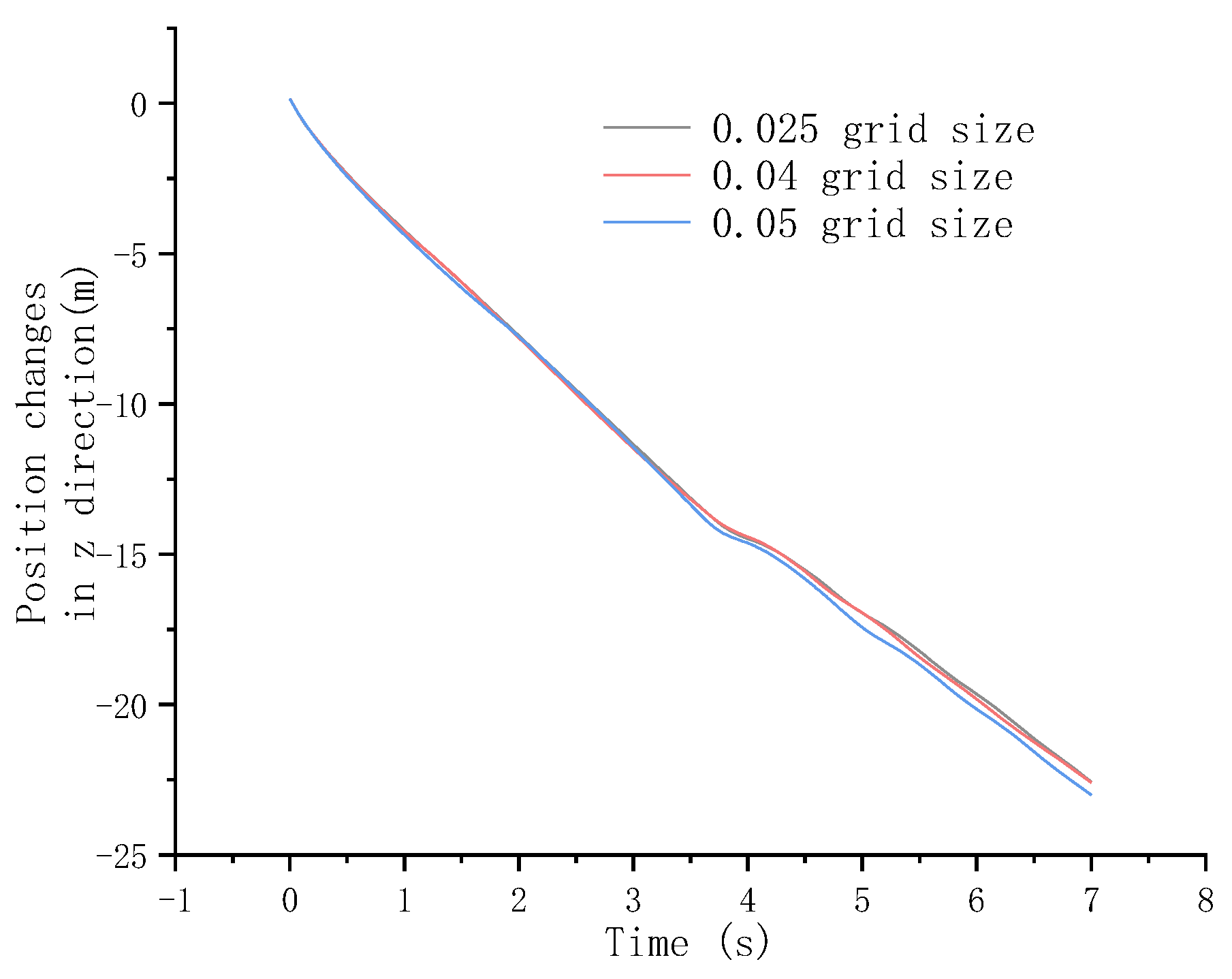
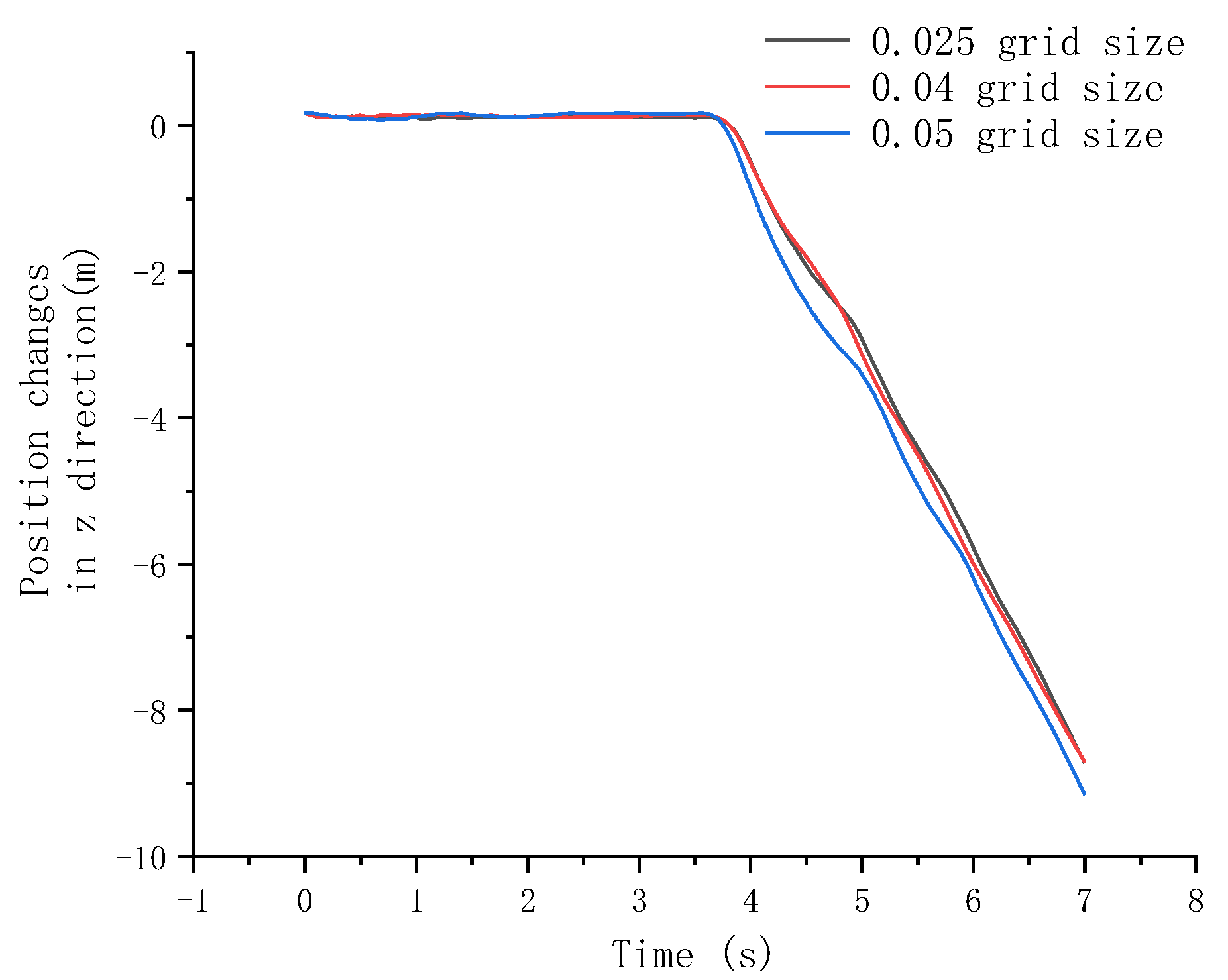
5. Grid Independence Verification
6. Calculation Results and Analysis
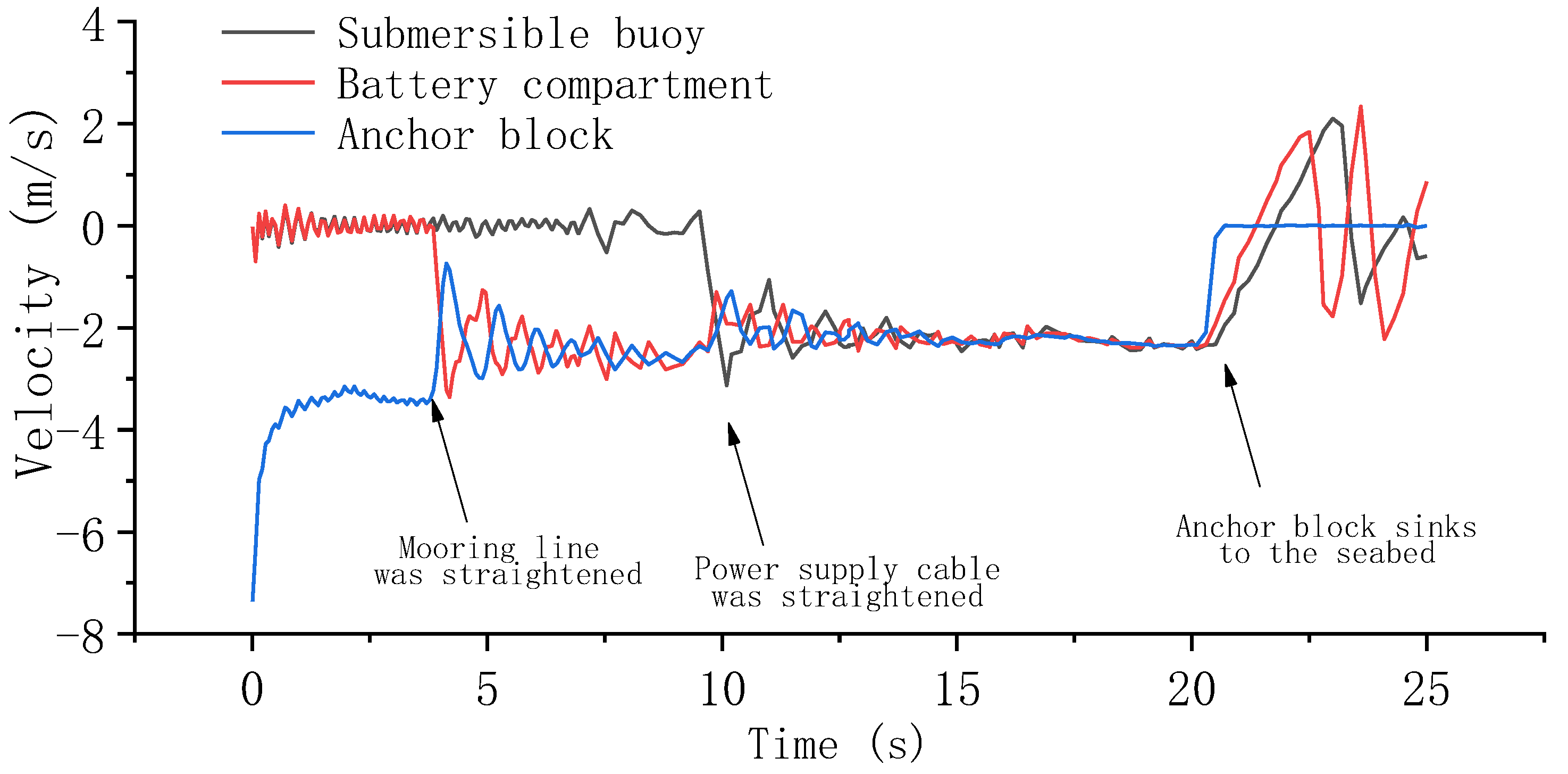
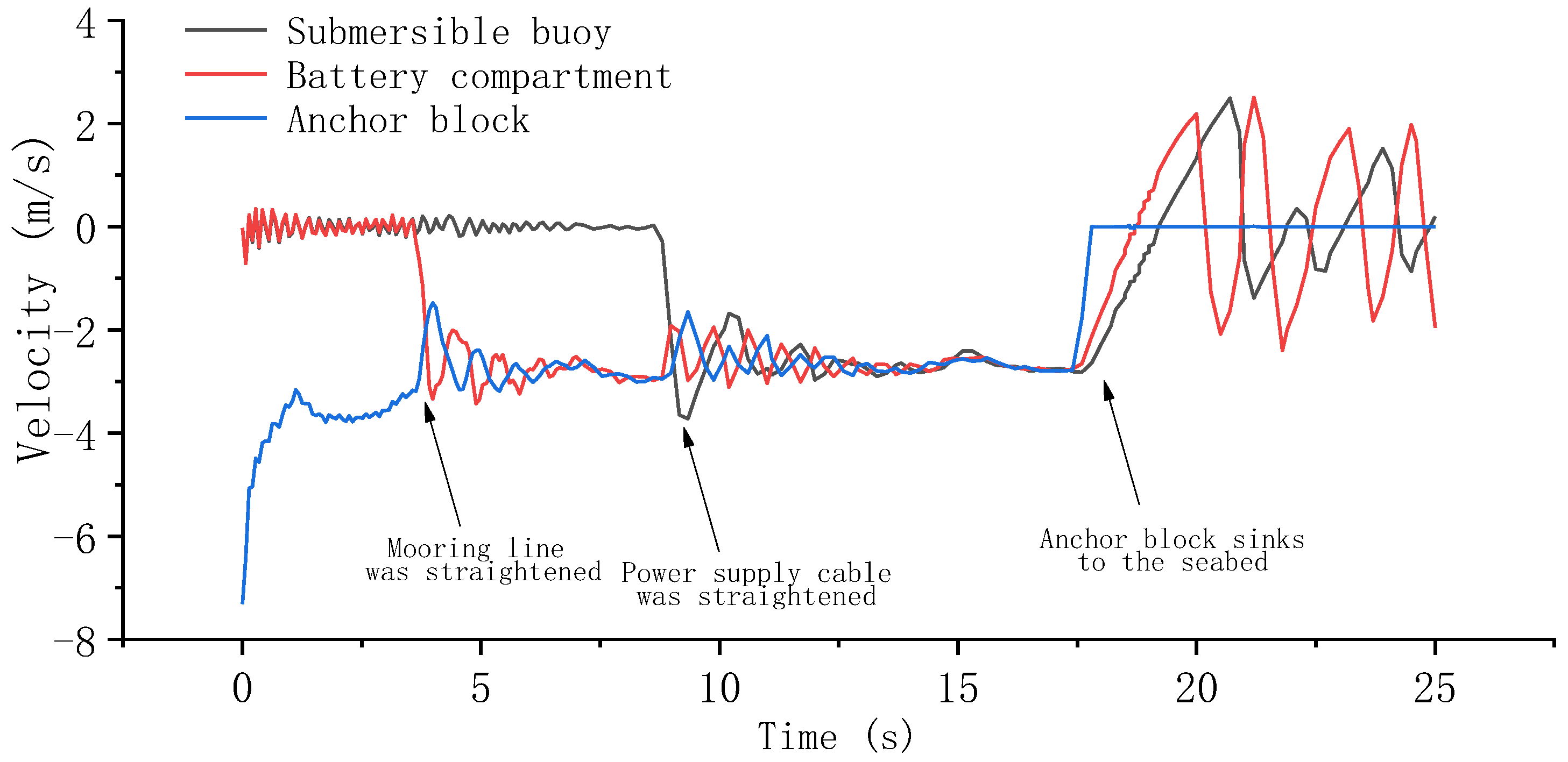
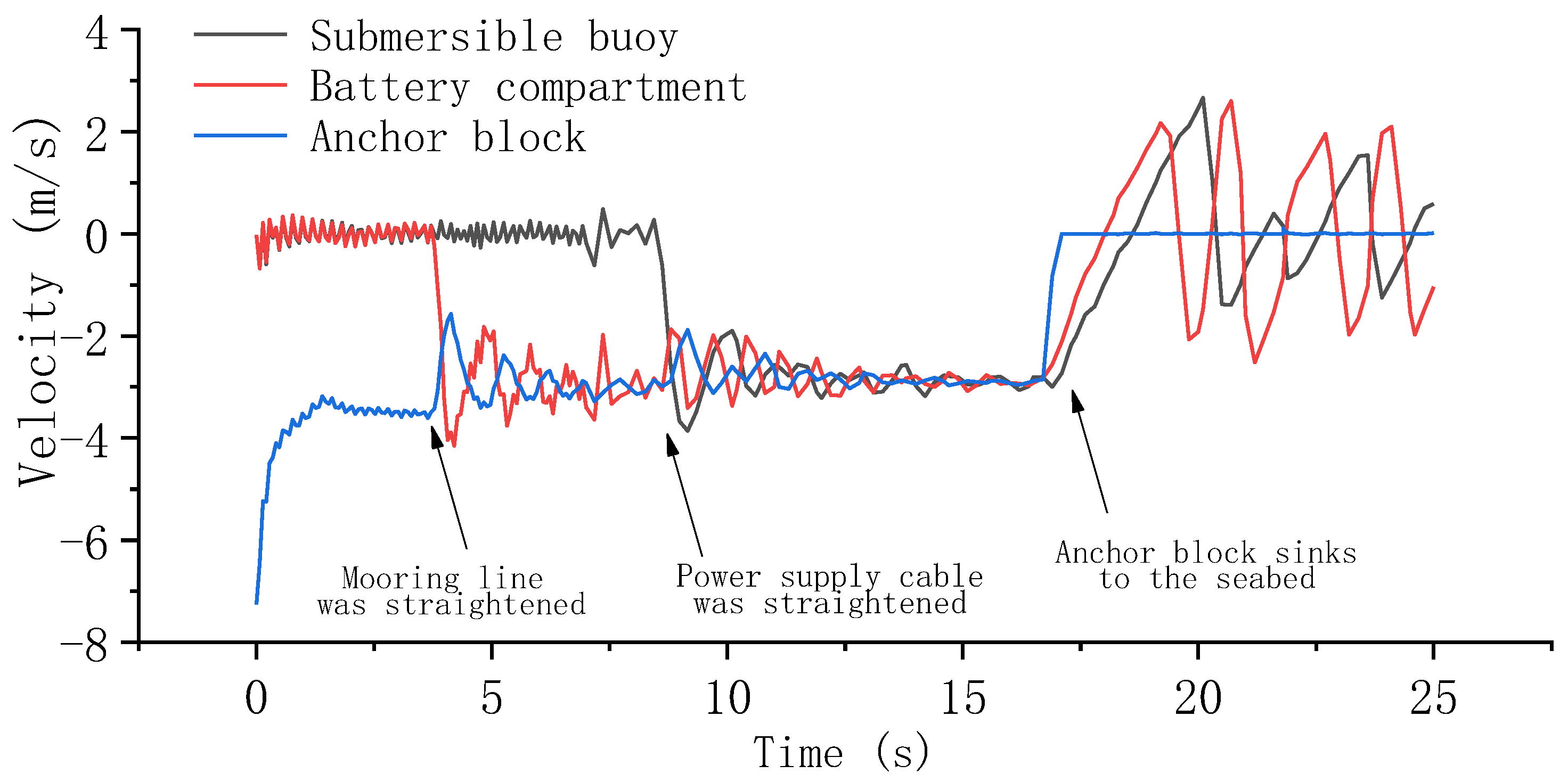
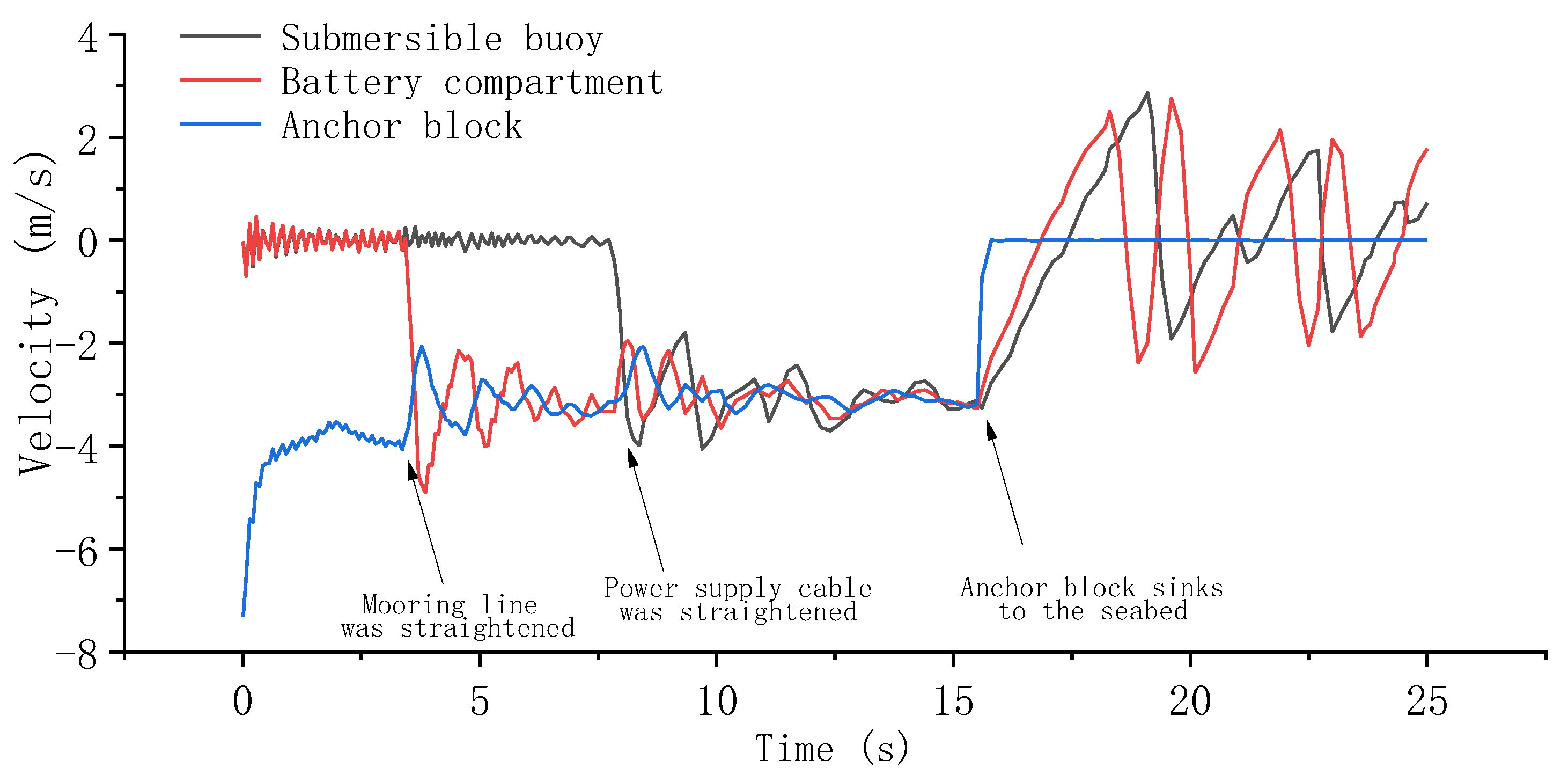
6.1. System Velocity Variation
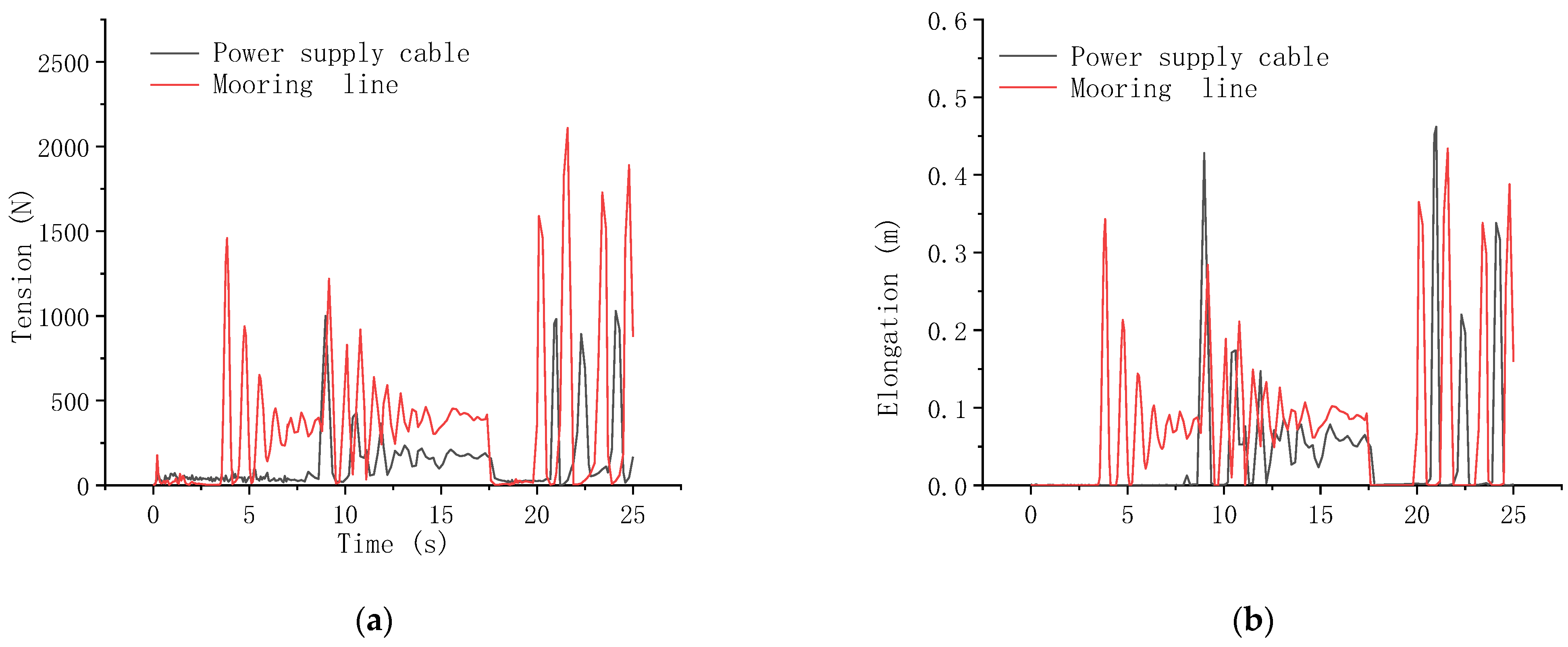
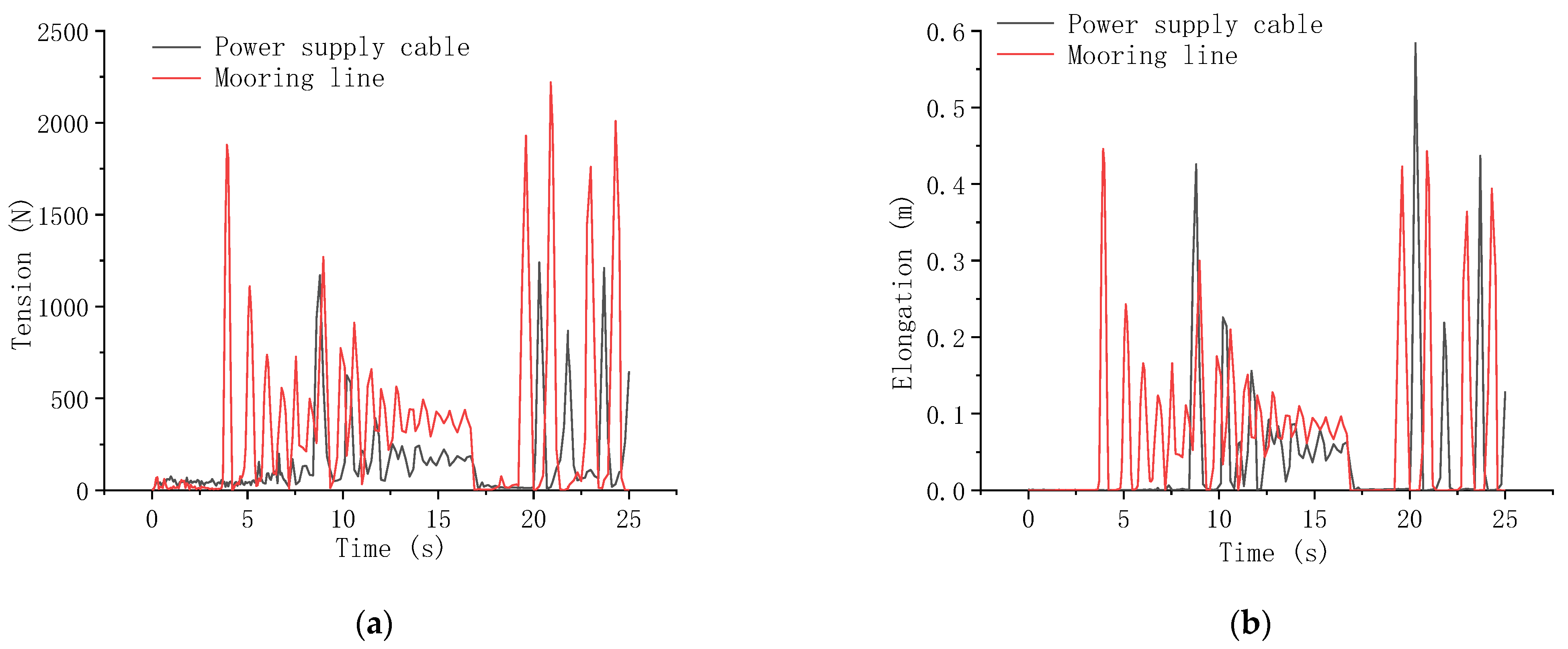
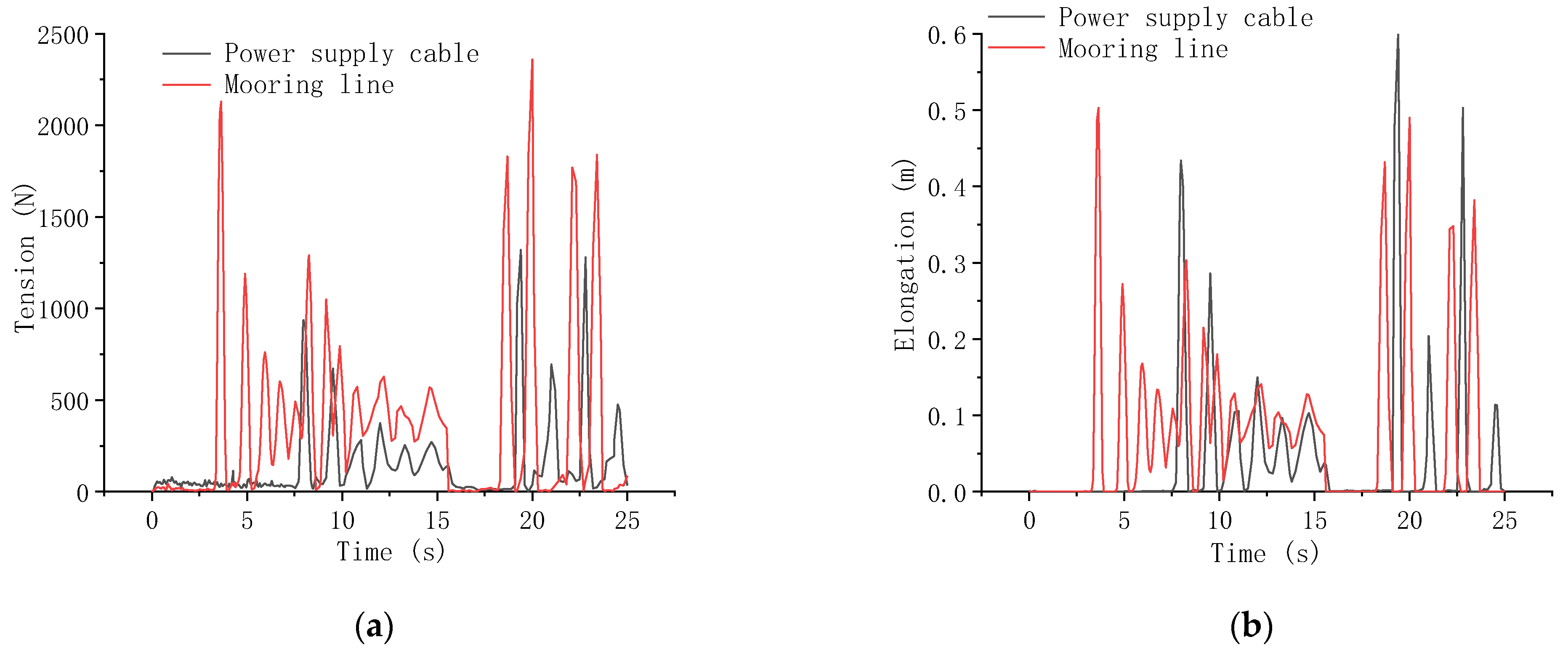
6.2. Cables Tension Variation
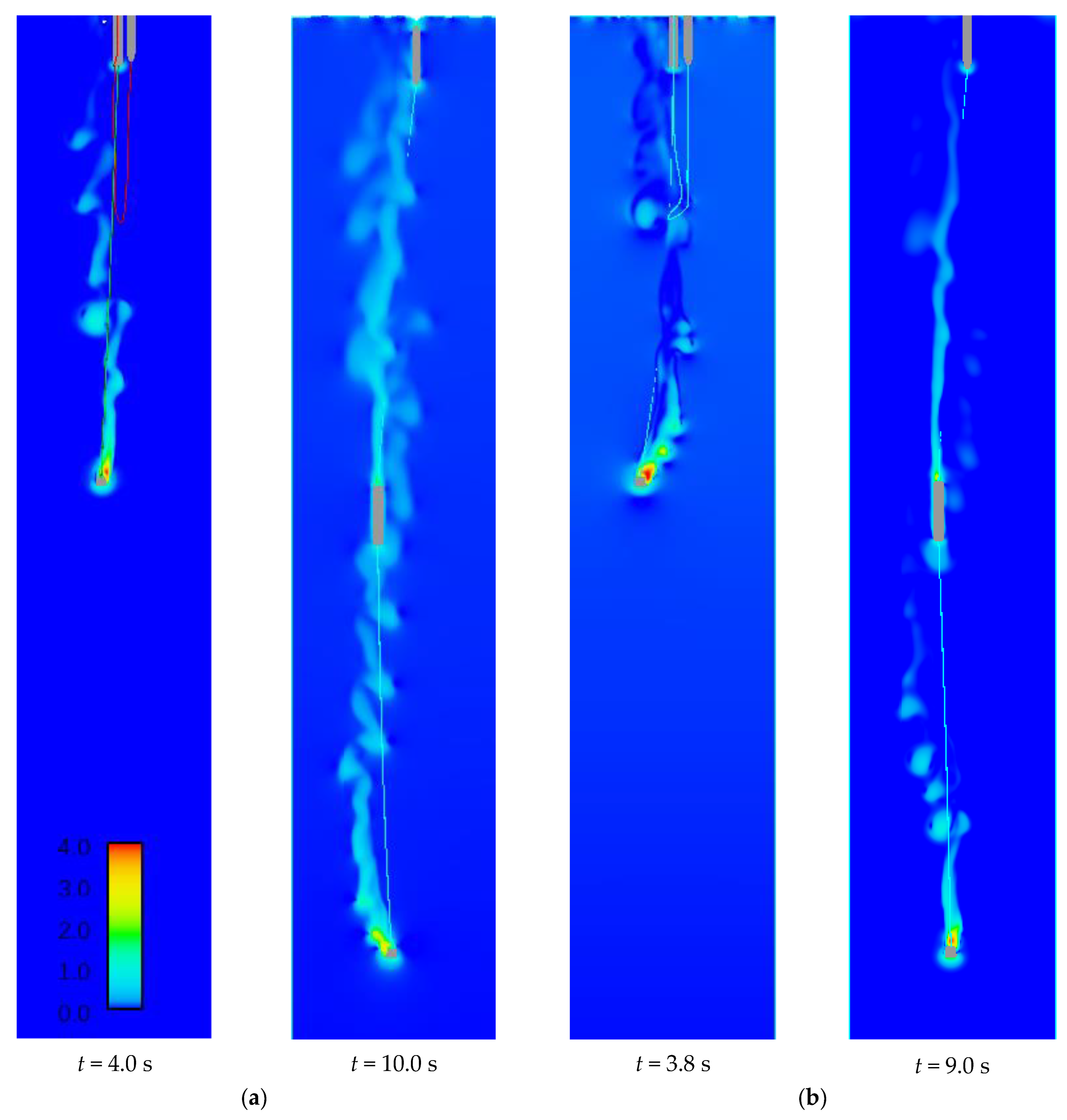
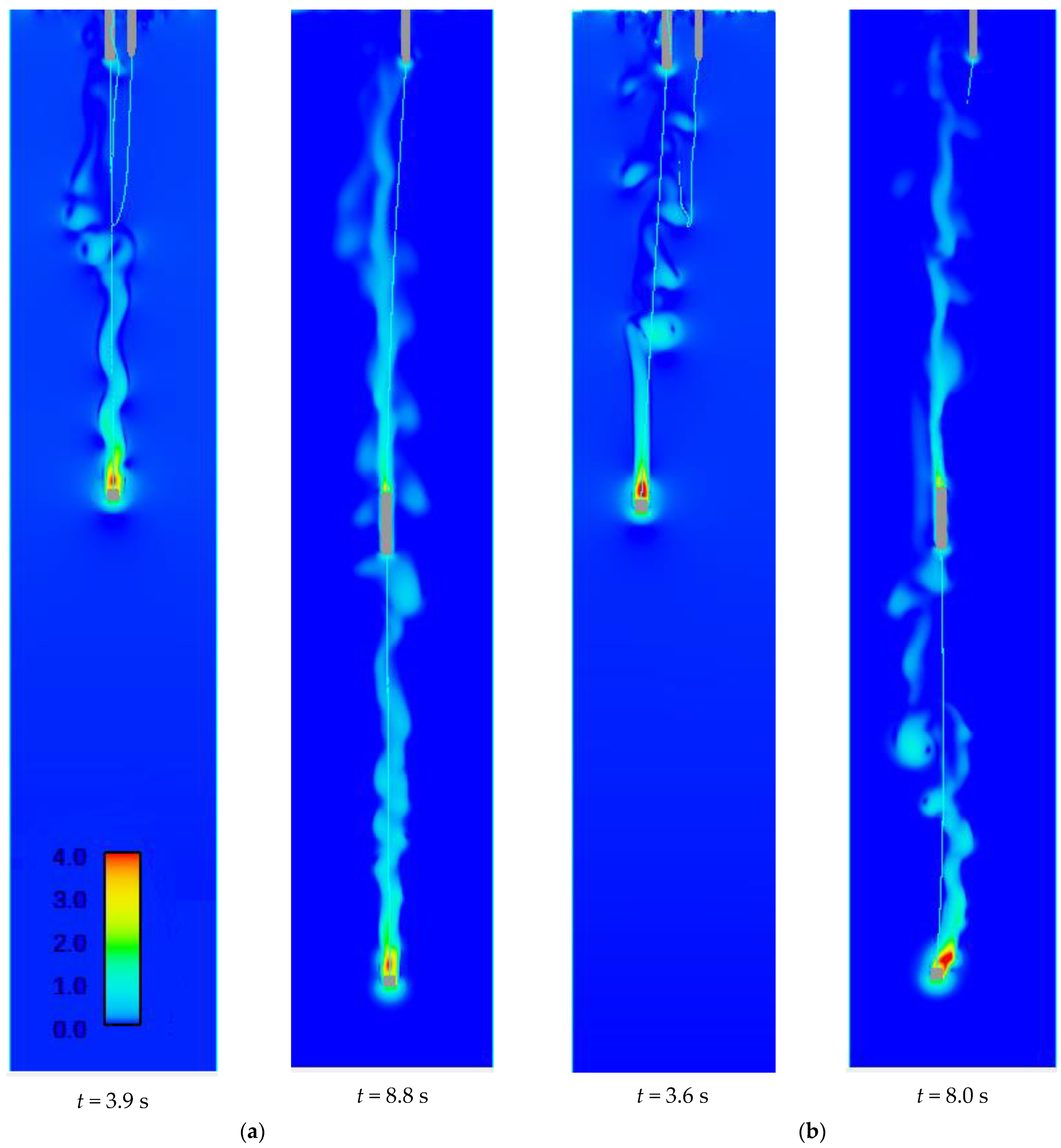
6.3. Fluid Velocity Variation during Deployment
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, F.Q.; Zhang, X.M.; Zhang, P.; Shen, G. The Design and Application of Marine Submersible Buoy System. Ocean Technol. 2004, 23, 17–21. [Google Scholar]
- Hamilton, A.; Chaffey, M.; Mellinger, E.; Erickson, J.; Mcbride, L. Dynamic Modeling and Actual Performance of the MOOS Test Mooring. In Proceedings of the Oceans 2003, Celebrating the Past… Teaming toward the Future, San Diego, CA, USA, 22–26 September 2003; Volume 5, pp. 2574–2581. [Google Scholar] [CrossRef]
- Augusto, O.B.; Andrade, B.L. Anchor Deployment for Deep Water Floating Offshore Equipments. Ocean Eng. 2003, 30, 611–624. [Google Scholar] [CrossRef]
- Gobat, J.I.; Grosenbaugh, M.A. Time-Domain Numerical Simulation of Ocean Cable Structures. Ocean Eng. 2006, 33, 1373–1400. [Google Scholar] [CrossRef]
- Chang, Z.; Tang, Y.; Li, H.; Yang, J.; Wang, L. Analysis for the Deployment of Single-Point Mooring Buoy System Based on Multi-Body Dynamics Method. China Ocean Eng. 2012, 26, 495–506. [Google Scholar] [CrossRef]
- Zheng, Z.Q.; Dai, Y.; Gao, D.X.; Zhao, X.L.; Chang, Z.Y. Dynamics of Deployment for Mooring Buoy System Based on ADAMS Environment. Adv. Mater. Res. 2013, 819, 328–333. [Google Scholar] [CrossRef]
- Zheng, Z.; Xu, J.; Huang, P.; Wang, L.; Yang, X.; Chang, Z. Dynamics of Anchor Last Deployment of Submersible Buoy System. J. Ocean Univ. China 2016, 15, 69–77. [Google Scholar] [CrossRef]
- Yu, Y.; Zhao, T.; Duan, M.; Zhou, T.; Xu, J.; Su, Y.; Zhong, Z.; Liu, H. Experimental Investigation on the Underwater Soft Yoke Mooring System Considering Sloshing. Ships Offshore Struct. 2019, 14, 309–319. [Google Scholar] [CrossRef]
- Yang, Q.; Zheng, Y.; Wang, Z.; Zhang, Y.; Hao, Z. The Influence of Vertical Cable on Flow Field and Acoustic Analysis of A Submersible Buoy System Based on CFD. In Proceedings of the 2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019; pp. 53–57. [Google Scholar] [CrossRef]
- Tang, W.; Zhuang, H.; Tang, Z.; Guo, S.; Yan, F. Mooring Positioning Performance of Jack-up Platform. Ships Offshore Struct. 2020, 15, 633–644. [Google Scholar] [CrossRef]
- Touzon, I.; Nava, V.; Gao, Z.; Mendikoa, I.; Petuya, V. Small Scale Experimental Validation of a Numerical Model of the HarshLab2.0 Floating Platform Coupled with a Non-Linear Lumped Mass Catenary Mooring System. Ocean Eng. 2020, 200, 107036. [Google Scholar] [CrossRef]
- Chandrasekaran, S.; Uddin, S.A.; Wahab, M. Dynamic Analysis of Semi-Submersible Under the Postulated Failure of Restraining System with Buoy. Int. J. Steel Struct. 2021, 21, 118–131. [Google Scholar] [CrossRef]
- Jiang, C.; el Moctar, O.; Schellin, T.E.; Paredes, G.M. Comparative Study of Mathematical Models for Mooring Systems Coupled with CFD. Ships Offshore Struct. 2021, 16, 942–954. [Google Scholar] [CrossRef]
- Yang, R.-Y.; Chiang, W.-C. Dynamic Motion Response of an Oil Tanker Moored with a Single Buoy under Different Mooring System Failure Scenarios. Ships Offshore Struct. 2022, 1–14. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Wang, F.; Ye, J. Numerical Studies on CALM Buoy Motion Responses and the Effect of Buoy Geometry Cum Skirt Dimensions with Its Hydrodynamic Waves-Current Interactions. Ocean Eng. 2022, 244, 110378. [Google Scholar] [CrossRef]
- Amaechi, C.V.; Wang, F.; Ye, J. Experimental Study on Motion Characterisation of CALM Buoy Hose System under Water Waves. J. Mar. Sci. Eng. 2022, 10, 204. [Google Scholar] [CrossRef]
- Neisi, A.; Ghassemi, H.; Iranmanesh, M.; He, G. Effect of the Multi-Segment Mooring System by Buoy and Clump Weights on the Dynamic Motions of the Floating Platform. Ocean Eng. 2022, 260, 111990. [Google Scholar] [CrossRef]
- Hirt, C.W.; Sicilian, J.M. Porosity Technique for the Definition of Obstacles in Rectangular Cell Meshes. In Proceedings of the 4th International Conference on Numerical Ship Hydrodynamics, Washington, DC, USA, 24–27 September 1985; pp. 450–468. [Google Scholar]
- Yakhot, V.; Orszag, S.A. Renormalization Group Analysis of Turbulence. I. Basic Theory. J. Sci. Comput. 1986, 1, 3–51. [Google Scholar] [CrossRef]
- Yakhot, A.; Orszag, S.A.; Yakhot, V.; Israeli, M. Renormalization Group Formulation of Large-Eddy Simulations. J. Sci. Comput. 1989, 4, 139–158. [Google Scholar] [CrossRef]
- Hirt, C.W.; Nichols, B.D. Volume of Fluid (VOF) Method for the Dynamics of Free Boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Huang, S. Dynamic Analysis of Three-Dimensional Marine Cables. Ocean. Eng. 1994, 21, 587–605. [Google Scholar] [CrossRef]
- He, C. Study on Multiphase Flow of Typical Body during Water Entry. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, June 2022. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Gravity | Net Buoyancy |
|---|---|---|
| Submersible buoy | 65 kg | 152.88 N |
| Battery compartment | 100 kg | 257.74 N |
| Cable | Length | Modulus of Elasticity |
|---|---|---|
| Mooring line | 12 m | 25,000 N |
| Power supply cable | 12 m | 50,000 N |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Liu, B.; Le, G. Numerical Simulation Research on the Anchor Last Deployment of Marine Submersible Buoy System Based on VOF Method. J. Mar. Sci. Eng. 2022, 10, 1681. https://doi.org/10.3390/jmse10111681
Chen X, Liu B, Le G. Numerical Simulation Research on the Anchor Last Deployment of Marine Submersible Buoy System Based on VOF Method. Journal of Marine Science and Engineering. 2022; 10(11):1681. https://doi.org/10.3390/jmse10111681
Chicago/Turabian StyleChen, Xiaohan, Bing Liu, and Guigao Le. 2022. "Numerical Simulation Research on the Anchor Last Deployment of Marine Submersible Buoy System Based on VOF Method" Journal of Marine Science and Engineering 10, no. 11: 1681. https://doi.org/10.3390/jmse10111681
APA StyleChen, X., Liu, B., & Le, G. (2022). Numerical Simulation Research on the Anchor Last Deployment of Marine Submersible Buoy System Based on VOF Method. Journal of Marine Science and Engineering, 10(11), 1681. https://doi.org/10.3390/jmse10111681