In the simplest case of two layers of inviscid fluids of different densities, the classic Lamb’s [
21] solution shows that for each given
, there are two modes of oscillations: For a surface mode, the wave on the upper surface has a greater amplitude than that at the interface, and the two waves are in-phase. For an interfacial mode, the greater wave amplitude is at the interface and the two waves are out-of-phase by
. For two layers of viscous fluids, Equation (
21) still permits two types of oscillations for a given
, but the interfacial mode (in the sense that the two waves are nearly
out-of-phase and the greater wave amplitude is at the interface) has a complex wavenumber with a very large attenuation rate
. Such an interfacial wave cannot propagate far into the ice field, and hence may not be relevant under the real conditions of sea ice and ocean waves. In the discussions below, we therefore focus on the surface mode solutions. The dimensionless dispersion Equation (
21) simply reads
. Since the density ratio
does not change significantly for ice and seawater, we will mainly examine the effects of ice condition
and viscosity ratio
, taking
.
3.1. Dispersion Relation
The wavenumber–frequency relation,
, is primarily determined by the ice-layer condition
and insensitive to a change in the water viscosity (
Figure 2a), essentially following the solution with an inviscid water (
for
), which was previously examined in [
17]. For high
, the wavelength becomes longer than its open-water (without the ice) counterpart. Note that the open-water dispersion relation
is practically identical to the Lamb’s solution for two layers of inviscid fluids, since the density ratio
(see the dashed curve in
Figure 2a). The presence of WBL in water, however, can significantly increase the wave attenuation rates
at low
(
Figure 2b). With a large
(i.e., smaller
for a given
) for a turbulent WBL,
can be orders of magnitude greater than with an inviscid water. The stronger effect on
at low wave frequencies may be interpreted as follows. The WBL is thicker for a lower frequency, as already indicated by the Stoke layer thickness
. Thus, the total viscous dissipation from the boundary layer can be greater. Furthermore, the dissipation due to ice is very small at low
, making the additional dissipation due to the WBL relatively important. By contrast,
at high
is dominated by the effect of ice. To give an example, for
m,
to 2 would correspond to wave periods
25 to 0.3 s; with
for an effective ice viscosity
,
= 10,000, 100, 10 are for the water viscosity
2 ×
, 2 ×
, 2 ×
, ranging from the molecular viscosity for laminar flows to the eddy viscosity for turbulent flows.
Fixing the viscosity ratio
and varying
, the
–
relationship changes significantly, while the attenuation profile
follows a similar trend for moderate and low
, despite an increasing
with a decreasing
(
Figure 3a,b). For sufficiently high
, when the attenuation rate becomes so high that the
e-folding decay distance
is comparable with the wavelength
, the wave behaves more evanescent than propagating. This is where
tends to plateau and
tends to vary very mildly with
. In lab experiments, Rabault et al. [
14] used high frequencies (
1.5–2.7 Hz) and relatively thick grease ice (
cm). Their data clearly show that the wavenumber becomes nearly invariant for
Hz, supporting the result of
plateauing at high
in
Figure 2a and
Figure 3a. A decrease in
could be caused by a greater
or smaller
h, or the combination of both. Varying
h will alter the correspondence between the dimensional and dimensionless frequency. While this is not a mathematical concern, it is convenient to assume a fixed
h when interpreting the results in
Figure 3a,b, so that all curves have the same
-to-
correspondence, making the comparison straightforward. In that case, when we vary
to change
but keep
, we imply that
varies accordingly with
. In other words, the comparison of attenuation profiles
in
Figure 3b shows the combined effects of increasing both
and
. Recall that
is little affected by
(
Figure 2a). Noting that
, we can examine the effect of
alone on
by holding
constant while varying
. This is shown in
Figure 3c for
. It is seen that the ice viscosity has a stronger, more complex effect on
at high frequencies.
In studies of wave propagation over a mud layer (e.g., [
22,
23]), it has been shown that with a sufficiently viscous mud layer, the wave damping rate tends to be the highest when the mud layer thickness is of the same order as the Stokes layer thickness based on the mud viscosity. By analogy, we plot
versus
, where the open-water wavenumber
and
; see
Figure 4. A distinct peak
is clearly seen with a low
, occurring at
, 1.69 for
, 1, respectively. Note that
; thus, decreasing
corresponds to a decreasing wave period for a given
. As
increases, the location of the peak rapidly shifts to
; i.e.,
is only attainable at the limit of the zero wave period. The water viscosity has little effect on the peak value or its location, since both remain virtually unchanged as we vary
. The occurrence of
seems to be related with the behavior of the wavenumber tending to plateau when the frequency becomes sufficiently high for the given ice condition. From
, we can estimate the
at which
occurs, e.g.,
0.80, 0.70, 1.23, 1.52 for
0.2, 1, 5, 10. It is then seen from
Figure 3a that these values of
mark the onset of
plateauing for the appropriate
.
3.2. Comparison with Observations
When examining the existing two-layer models of ice overlaying inviscid water, e.g., a viscous ice [
6] or viscoelastic ice [
8], Yu et al. [
17] considered a number of field and lab datasets of wave attenuation rate from independent studies, including the Arctic ‘Sea State’ data [
24,
25], the Weddell Sea data [
26], and experiments in wave tanks of various sizes and under different ice conditions [
27,
28,
29]. Yu et al. [
17] demonstrated that the reduction of data scattering in the dimensionless plane
leads to more consistent estimates of effective ice-layer properties. However, over the range of frequencies spanning from field to lab waves, models assuming an inviscid water cannot satisfactorily fit the data with one single calibration of the ice properties. Specifically, for the model of viscous ice overlaying inviscid water, fitting with a moderately low
tends to underestimate the field data at low frequencies, while that with a very low
tends to overestimate the lab data at high frequencies.
This motivated the recent works by Rogers et al. [
30] and Yu et al. [
13], who proposed a new method to parameterize wave attenuation rate by sea ice in the dimensionless plane
. Analyzing a large dataset from the “Polynyas, Ice Production, and seasonal Evolution in the Ross Sea” (PIPERS) field campaign [
31,
32,
33], they obtained a monomial fit
, i.e., in dimensional form
. (The PIPERS dataset contains 8957 points of
, obtained from the wave spectrum measurements and then co-located with the satellite data of ice thickness; see [
30,
34] for details). Without any further calibration, this 4.5-power formula agrees remarkably well with those other field and lab datasets previously considered in [
17], despite a slight under-prediction of the lab datasets at high frequencies. The empirical nature of data-fitting, however, does not elucidate the physics.
In
Figure 5, these abovementioned field and lab datasets are replotted and compared with the solution of Equation (
21). In view of the findings in
Figure 2b and
Figure 3b,c, we anticipate that including the effect of the WBL in water will improve the predictions of
at low frequencies, hence reducing the bias previously seen in the solution with an inviscid water [
17]. Indeed, with
and
, the theoretical solution of
is significantly better than that with an inviscid water (
) when compared with data over the range of frequencies for both field and lab waves. The 4.5-power empirical formula given in [
13] agrees well with the theoretical result using
and
, though a greater discrepancy is noted at high frequencies. As Yu et al. [
13] remarked, the 4.5-power formula under-predicts the lab measurements, because it is calibrated solely against the PIPERS field data. We can slightly modify the monomial fit to correct the bias at high frequencies by a recalibration including other datasets, e.g.,
which is little different from the 4.5-power formula at low frequencies, but is less biased in predicting the lab data; see
Figure 5. The modified 4.8-power formula is seen to better agree with the theoretical result that includes the effect of WBL. The agreement therefore offers a possible physical basis for the empirical formula from data-fitting.
3.3. Wave Amplitudes and Velocity Distributions
Upon solving the dispersion Equation (
21), we compute the null vector
x corresponding to
, thus obtaining the admissible coefficients
for the velocities and pressure in Equations (14)–(
18). The waves on the upper free surface and at the interface then follow from the kinematic conditions (
6) and (
9), respectively.
With the upper layer being viscous, the greater wave amplitude is still at the upper surface for surface mode oscillations (as is the case of two inviscid fluids), but a phase shift occurs and the wave at the interface begins to lag behind (
Figure 6). For example, for
,
with
, meaning that the interfacial wave
lags the surface wave
by about
; with
, the phase lag increases to
. This phase lag is a manifestation of the wave motion becoming rotational. The water viscosity has an insignificant effect on
or
(see the results with
and 100 in
Figure 6). When the upper ice layer is not so viscous or thin, e.g.,
,
closely follows Lamb’s solution for two layers of inviscid fluids, and the effect of ice viscosity is mostly to cause the phase lag. At low
, the phase lag increases with decreasing
, but for sufficiently high
,
becomes very complex and highly dependent on
. It is particularly notable that for
, both
and
rapidly change for
, which seems to be associated with the behavior of
shown in
Figure 3a. For a highly viscous and very thin ice layer, e.g.,
, the amplitude ratio is fairly close to 1 and the phase difference is small (with
and
at some intermediate frequencies). From the physical point of view, it seems reasonable to anticipate the difficulty of developing differences between the two waves when the upper layer becomes so thin and viscous.
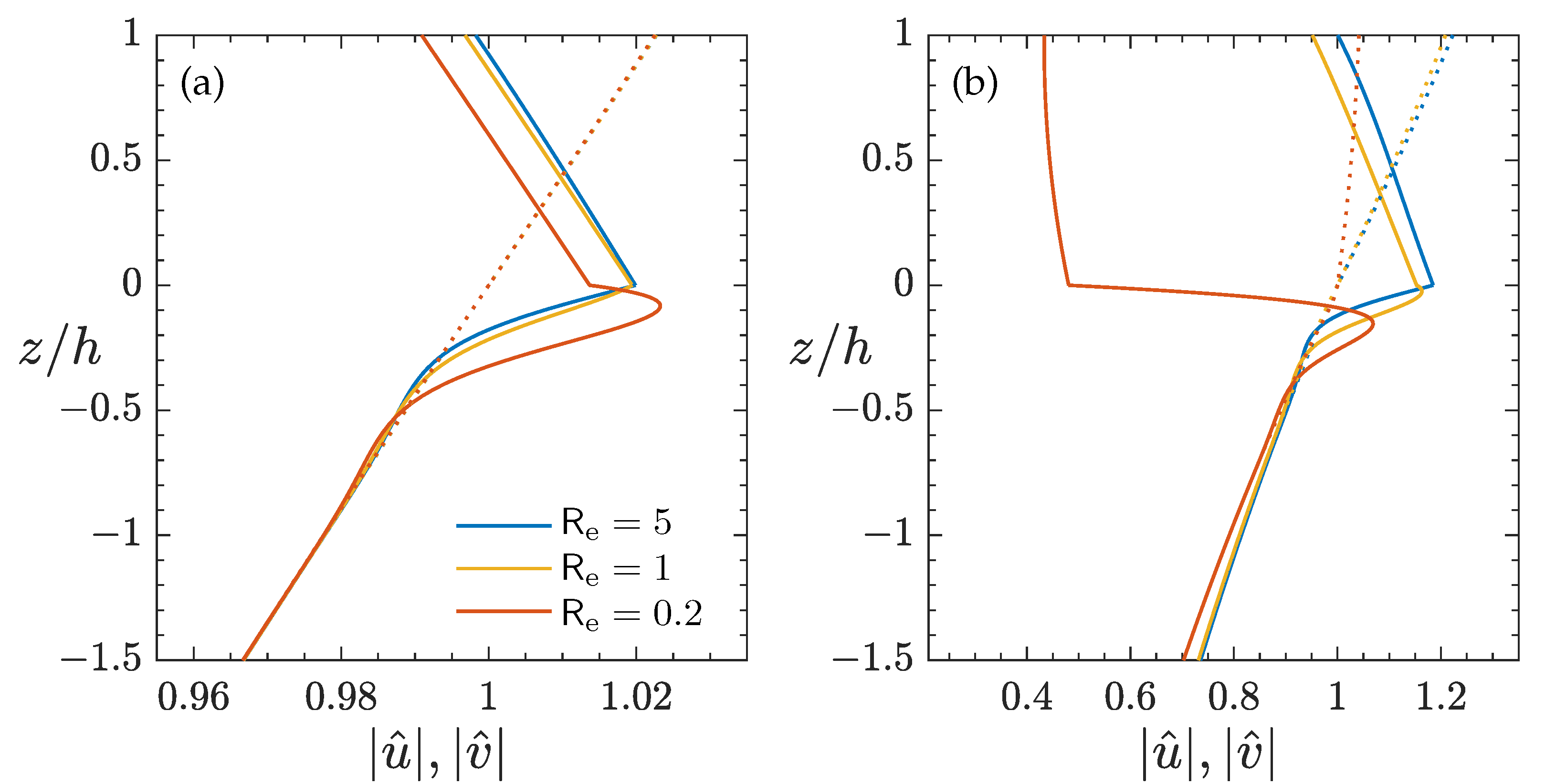
Examples are given in
Figure 7 and
Figure 8 showing the vertical profiles of
and
. Recall that the velocity amplitudes
and
are complex functions in
z, containing the phase relation between
u and
v. Here, we have scaled the velocities such that
. This implies a normalization of
using
, where
a is the characteristic wave amplitude of
, in view of Equation (
9). In
Figure 7, we examine the effect of the eddy viscosity of water, by fixing the ice-layer condition
while varying the ice-to-water viscosity ratio
. The case of inviscid water (
for
) is included for comparison. In that case,
is discontinuous at
since the water is free to slip, and for
, the solution follows that of an irrotational deep-water wave; i.e.,
(see the results with
in
Figure 7). We then show the effect of ice-layer viscosity in
Figure 8 by varying
, but holding
constant to represent the situation of fixing
.
In the viscous ice layer, the horizontal velocity amplitude increases downward towards the interface, in contrast to that of an irrotational linear wave, where decreases with depth. Since the water is less viscous than the upper ice layer, it can deform more freely under similar stress. Thus, at the interface, the water does not tend to resist the ice-layer flow. Instead, to compensate for its lower viscosity, the water velocity must develop an appreciably larger gradient in order to match the shear stress exerted by the ice flow at , as required by the conditions of continuity across the interface. Immediately away from downward, decreases much more rapidly than , signifying the WBL in water. At the outer edge of the WBL and beyond, , as expected for the potential flow of the irrotational deep-water wave. The outer edge of the WBL is characterized by an ‘overshoot’, where briefly decreases beyond the potential flow solution before regaining and finally following it. Overshooting the targeted potential flow solution when approaching it is a typical feature of an oscillatory boundary layer. This vertical structure of remains qualitatively similar as we vary the frequency, although for long waves, the changes in the velocity field are small over the thin depths in the ice layer and WBL.
For a greater eddy viscosity in water (i.e., smaller ), which may represent the strong mixing in a turbulent WBL due to intensified eddy activities, the velocity shear becomes weaker as the boundary layer thickens, with its outer edge intruding into the deeper depth. This reduces at the interface and, consequently, affects the profile in the ice layer. Specifically, for a relatively high , the reduction of only affects the lower part of the ice layer, decreasing the shear in the depths close to the interface, whereas near the upper surface, is little affected. For a low , the reduction of causes a decrease of in the entire ice layer because the long-wave oscillation can penetrate a shallow layer/depth relative to the wavelength without changing.
The vertical velocity amplitude
is little affected by the ice-layer viscosity or the presence of WBL in water, and closely follows the solution for an irrotational deep-water wave (i.e.,
), except for a slight departure occurring in the ice layer when the wave is short (e.g.,
); see
Figure 7b,d. This is because
v directly responds to the oscillations of the upper surface and interface, and, therefore, to the dynamic pressure determined by the irrotational component of the linear wave motion; see Equations (
5), (
9), (
14c) and (
16c).
For moderately low values of
, varying
while fixing
has only mild effects on
and virtually none on
, regardless of the frequency; see the results with
and 1 in
Figure 8. For a highly viscous and thin ice layer, e.g.,
, the velocity profiles are noticeably different from those with
. (i) In the ice layer,
is considerably reduced, in particular for high
. However, most interesting is the shear
. For a relatively low frequency wave,
remains similar to that with
; but for sufficiently high
, a zero shear,
, tends to occur at an intermediate depth inside the ice layer, with a positive shear rate in the upper region close to the free surface. Such a profile of
becomes much more pronounced for
with
. (ii) In contrast to the cases with
, where the water velocity
continuously decreases inside the WBL, with
,
first increases as we move away from
, reaches a maximum, and then begins to decrease towards the potential flow solution at the outer edge of the WBL; see the results with
in
Figure 8. For a high frequency (e.g.,
with
), the thin WBL is mostly characterized by an increasing
because of the small interfacial velocity
. The water velocity gradient
in the vicinity of
is determined by the stress condition (
10). For a very low
(i.e., highly viscous and thin ice layer),
(negative) can be great due to the large attenuation rate
, and dominates the total shear stress in the ice-layer flow, as
and
both become weak. Thus, to satisfy the stress conditions at
, the requirement for the water velocity gradient
can be different from that with
. (iii) Despite the high ice-layer viscosity, the vertical velocity
for a low frequency wave still closely follows the variation
and becomes more uniform in
z for high frequencies. Weber [
5] argued that as the asymptotic limit of the ice layer is so thin and viscous, the horizontal motion is mostly suppressed and the ice layer oscillates more or less freely in the vertical direction, thus behaving like an inextensible surface film. Indeed, the solution of
and
with
in
Figure 8b indicates that the two-layer fluid system approaches such a limit as
.
The depth of the outer edge,
where
r is a constant may be used to estimate the WBL thickness. For example, with an ice-layer condition
, corresponding to the viscosity ratio
, 100, 10,
0.0258, 0.0816, 0.2582 for
. From
Figure 7a, we read
, 0.40,1.4 for the corresponding
and therefore estimate
4 to 6. For a low-frequency long wave
in
Figure 7b,
is greater, and so is the WBL thickness, but the estimate of
r is similar. As in the example given in
Section 3.1, if
m and
m
/s for
, the WBL thickness for a wave of 1.1 s can be ∼0.14 m with an eddy viscosity
m
/s in water.
3.4. Wave-Induced Reynolds Stress and Implication on the Steady Streaming
The time average of the product of linear flow velocities,
, is the wave-induced Reynolds stress, representing the mean momentum flux due to wave fluctuations [
16]. For irrotational linear waves,
identically; i.e.,
u and
v are not correlated since
v leads
u by 90
. When the wave motion becomes rotational under the effects of viscosity, the phase relation between
u and
v is shifted and, consequently,
.
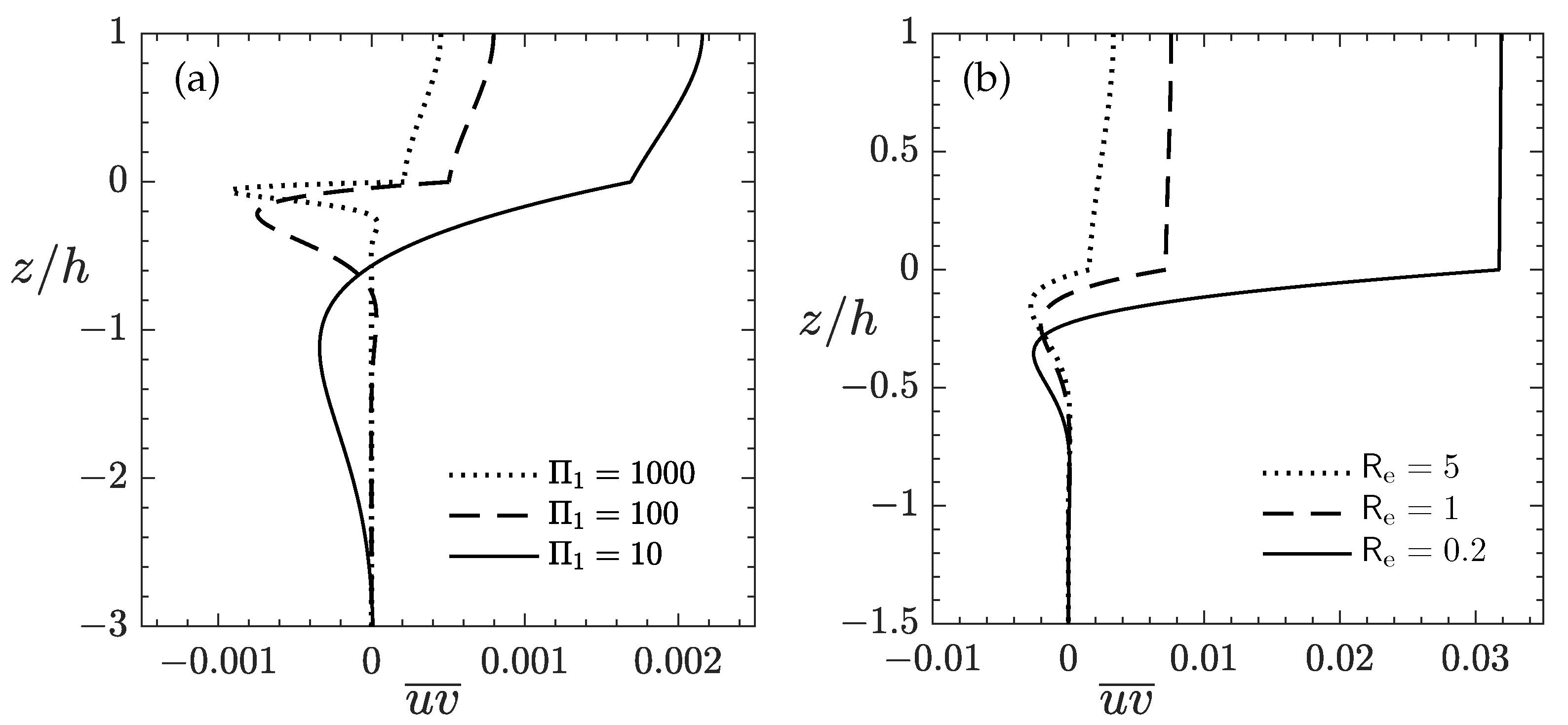
In the ice layer,
leads
by less than
. As a result,
for
and decreases mildly from the upper surface to the interface (
Figure 9). Inside the WBL and as we move away from
,
first decreases rapidly, reaches a negative peak (
), and then returns to approach
at the outer edge
and beyond in the inviscid core. This vertical structure of
is generally observed as we vary
and
, as well as
, despite the differences in the magnitude of
and in the thickness of WBL. Increasingly, either
or
will increase
for
in the ice layer. This is consistent with the fact that a major effect of viscosity is to induce a phase shift between the two waves and affect the phase relation between
u and
v.
The Reynolds stress
is a nonlinear quantity obtained from the linear wave theory, therefore being of the second order in wave slope
. However, it is physically significant, since it is a driving force for the wave-induced mean flow. For waves on an open-water surface, it is well understood that a steady flow must exist in order to provide a mean shear stress to balance the wave-induced Reynolds stresses due to the viscous effects of wave boundary layers at the surface and seabed [
16]. This mean flow is called Eulerian steady streaming, and when combined with the Stokes drift, gives the fluid particle (Lagrangian) drift, i.e., the mass transport in water waves following [
15].
While
is a main driving force, determining the mean flow field necessitates a formal nonlinear analysis to account for other processes, including the mean dynamic pressure and momentum fluxes due to wave attenuation, nonlinear effects of surface, and interface curvatures in the boundary and interface conditions, as well as the lateral boundary conditions in the wave propagation direction (e.g., whether the system is closed or open). Such a nonlinear analysis may be formulated using a method analogous to studies of mass transport in water waves over a mud layer (e.g., [
35,
36]). That is beyond the scope of this study, but we may nevertheless make a very preliminary speculation on steady streaming based on
.
When the wave amplitude is small relative to the thickness of the wave boundary layer, the vorticity dynamics are dominated by viscous diffusion [
15]. Assuming
, i.e., a uniform condition in the wave propagation direction and negligible wave attenuation, the equation for the streaming velocity
may be written as [
16]
Suppose Equation (
25) can be applied in the thin ice layer, and in the WBL at the interface. We integrate it separately for
and
using the appropriate viscosity. Assuming that (i) the mean stress vanishes outside the WBL, i.e.,
for
; that (ii) the continuity of mean stress at the interface can be approximated as
and that (iii) the mean velocity is continuous at
, i.e.,
, we obtain
Mathematical details are given in
Appendix A. Equation (
27b) is only valid inside the WBL. At the outer edge
, it provides a condition for determining the mean flow field in the inviscid region
. The mean velocity
at the interface can be determined with additional information, e.g., conditions at the upper surface, matching at the outer edge of the WBL with the inviscid region (once the nonlinear analysis is carried out), or constraints on the depth-integrated transport depending on the lateral boundary conditions.
To explore the effects of
and
, we can recast Equation (27) into the dimensionless form by normalizing
using
(or equivalently,
) as in
Section 3.3. Sample calculations are given in
Figure 10 for a low frequency
such that the attenuation rate
is small and the wave propagation is approximately uniform in
x. The factor
is excluded from the calculations (see
Appendix A). The calculations are for waves propagating in the
direction. A few points are worth noting. (i) Relative to the interfacial mean velocity
, the streaming current in the WBL under the ice is much more pronounced, clearly indicating that the phenomenon is related to the boundary layer flow because of the high shear rate. (ii) Relative to
, the streaming current in the ice layer is forward in the direction of wave propagation, while immediately beneath the ice, it tends to be backward in the WBL. (iii) For a smaller viscosity ratio, which may represent a turbulent WBL with a large
due to strong mixing, the backward relative streaming velocity occurs throughout the WBL, and
at the outer edge
; in the ice layer, the forward velocity
becomes stronger (see the curve for
and
in
Figure 10). On the other hand, with a greater viscosity contrast,
reverses direction and becomes forward inside the WBL. The larger the viscosity ratio is (e.g., due to increasing
while keeping
), the stronger the backward relative streaming velocity becomes under
, but a weaker forward
is reached at the outer edge; see the results with
,
, and with
,
in
Figure 10. Furthermore,
, indicating that in an average sense, the water feels the ice layer as if it were a deformable ’solid plate’ rather than a fluid layer because of the great contrast in their viscosities. (iv) A large mean shear
in the WBL is theoretically expected for a large
because of the stress condition at the interface, but may be unattainable in real fluids since shear instability would most likely occur. The subsequent, enhanced mixing would certainly alter the streaming velocity profile, likely towards one similar to that with a smaller
. (v) At the outer edge of the WBL,
tends to be uniform and remains so just outside, in the region where the depth is greater than
, but it is still small compared with the wavelength. This allows matching with the mean flow in the inviscid core where the length scale of the flow is characterized by the wavelength. For a complete determination of the profile
outside the WBL, one needs to carry out nonlinear analysis for the inviscid core.
While these are speculations based on crude assumptions and will likely be revised by a rigorous analysis, there seems to be some relevance. Processing their PIV data using proper orthogonal decomposition, Rabault et al. [
14] showed the existence of a mean water flow under the grease-ice layer in the opposite direction of wave propagation. In an earlier study, Martin and Kauffman [
37] also indicated a backward flow at the ice–water interface when illustrating the mean circulation in grease ice with an increasing thickness towards the beach-end of the wave tank. Rabault et al. argued that the back-flow may be due to the packing of ice, which, as a consequence of mass conservation, causes a counter-current of water in the opposite direction. However, on the other hand, ice piling up in itself can be an indication of a forward drifting current in the upper layer, relative to the water. From the discussion above in (iv), a mean flow profile with a smaller viscosity ratio is likely to be observed, in view of the shear-induced mixing. Taking, for example, the case with
and
in
Figure 10, we may argue that
is nearly zero or at least very small, since in the case of deep water depth, we expect
for
, and it already happens that
at
. Thus, we see that under the combined effects of ice and water viscosities, the wave-induced Reynolds stress can drive a forward streaming in the upper ice layer and a backward, relatively strong streaming in the water just underneath the ice.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









