
Extended State Observer-Based Fuzzy Adaptive Backstepping Force Control of a Deep-Sea Hydraulic Manipulator with Long Transmission Pipelines



Abstract
:1. Introduction
2. System Modeling
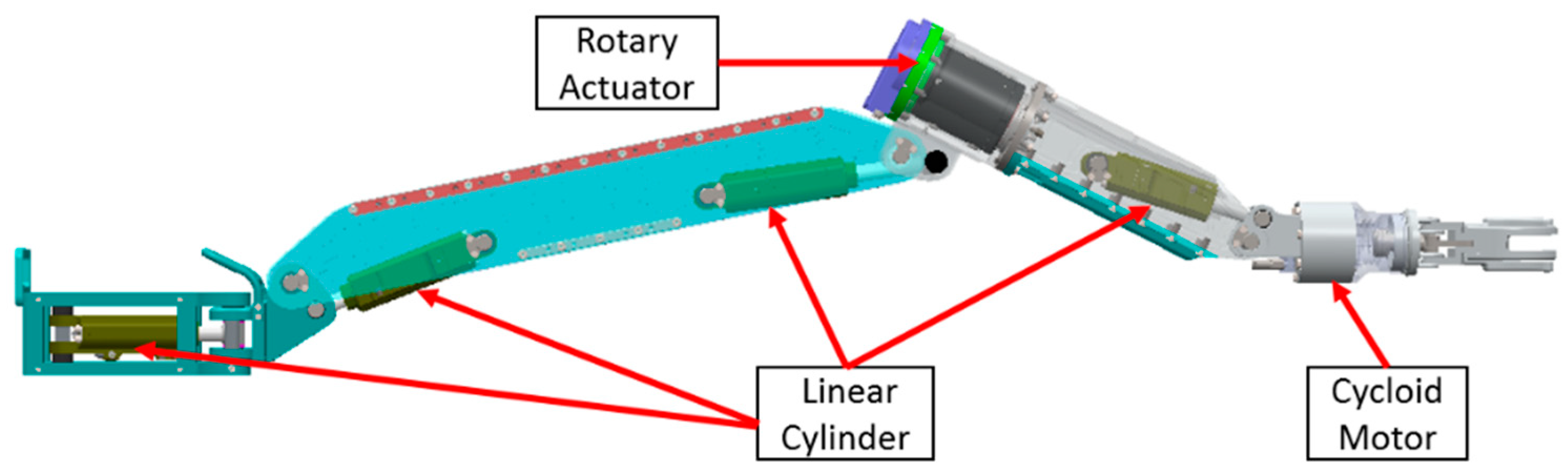
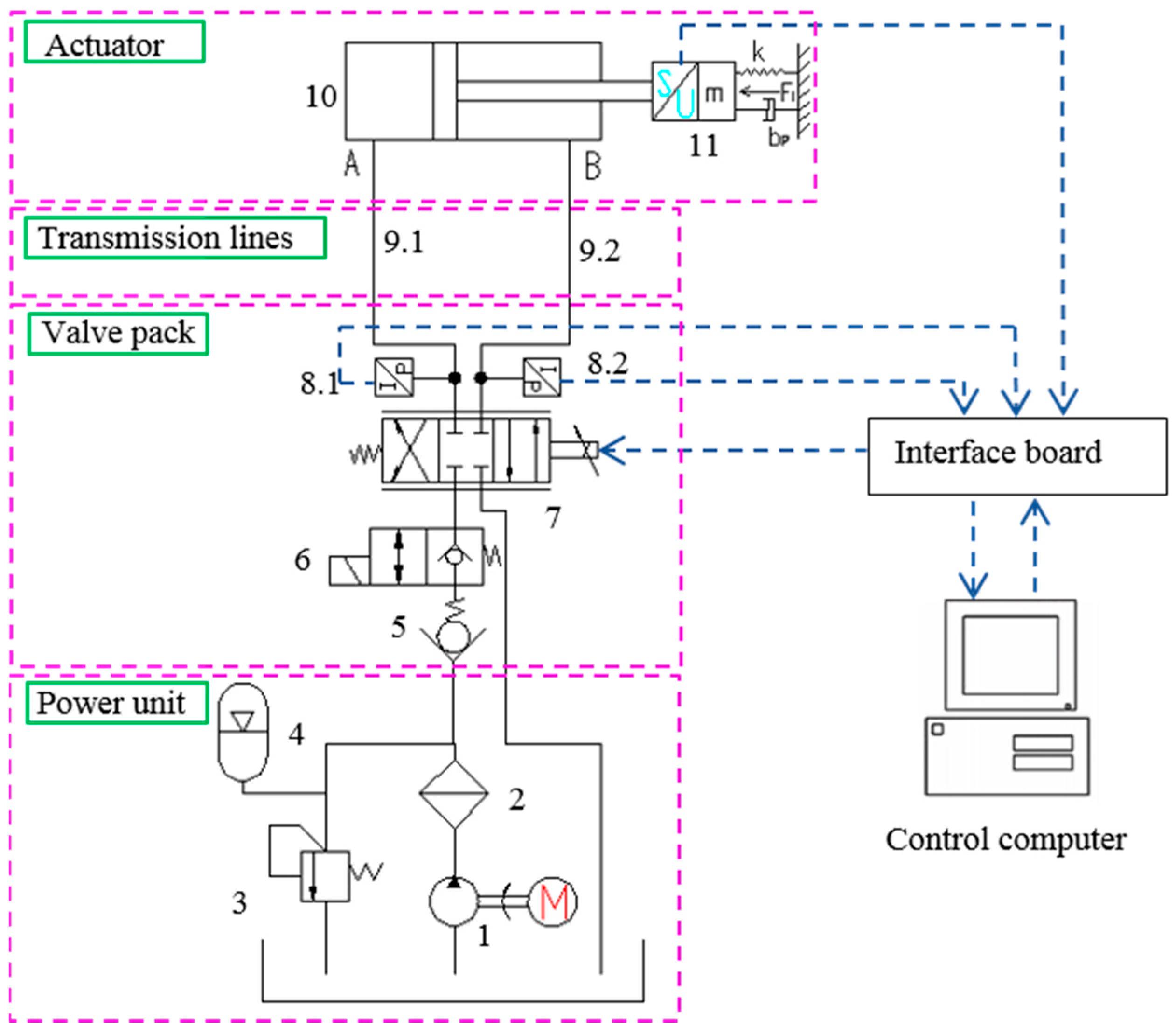
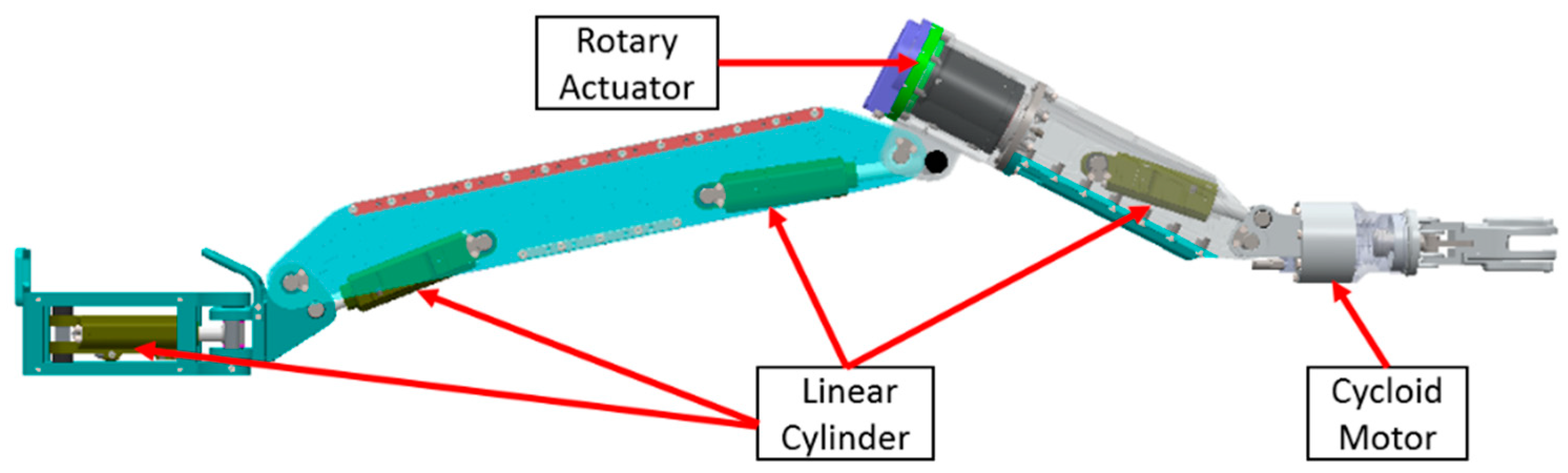
2.1. System Description
2.2. Pipeline Model
2.3. Valve-Controlled Cylinder Servo System Dynamics
2.4. State Space Model of the System and Its Simplification
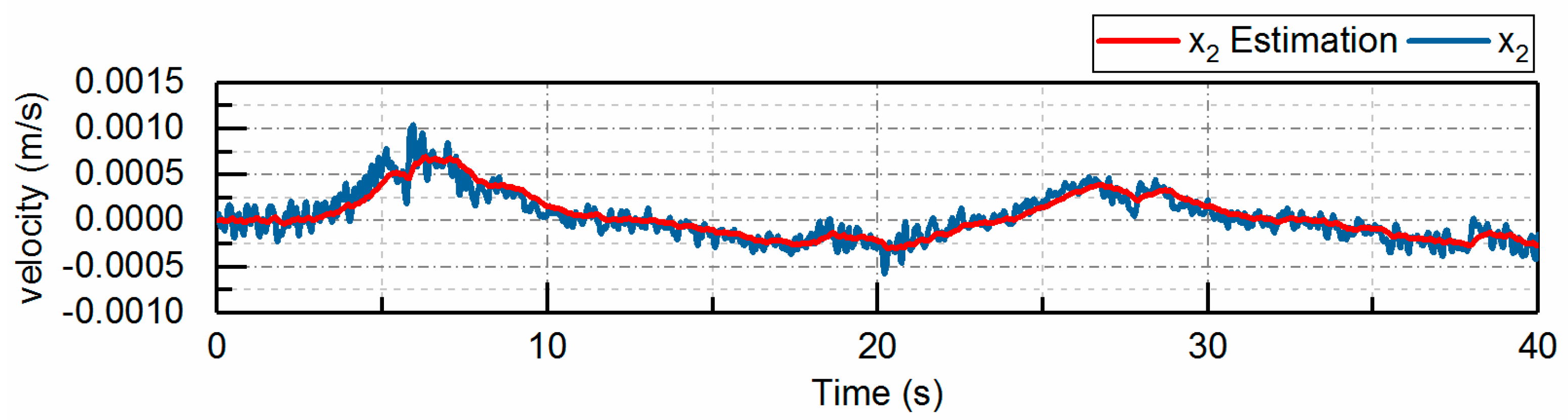
3. Extended State Observer Design
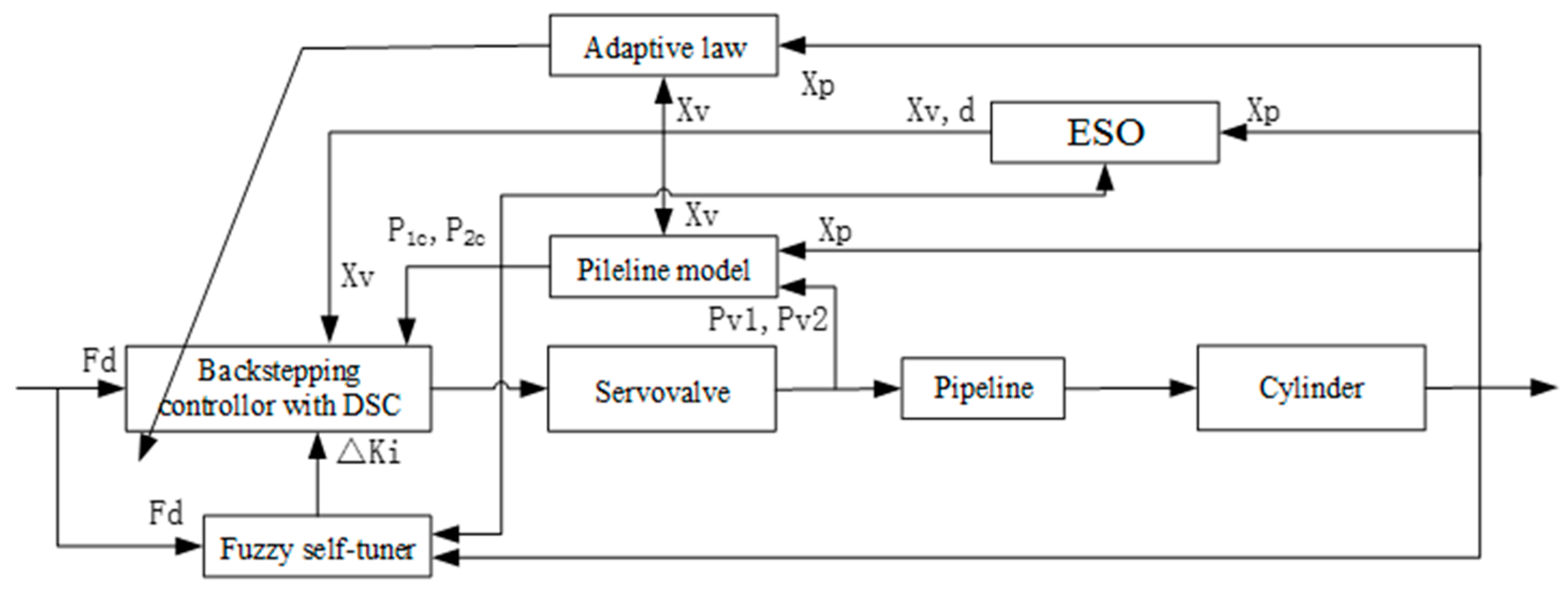
4. Extended-State-Observer-Based Fuzzy Adaptive Backstepping Controller Design
4.1. Controller Design
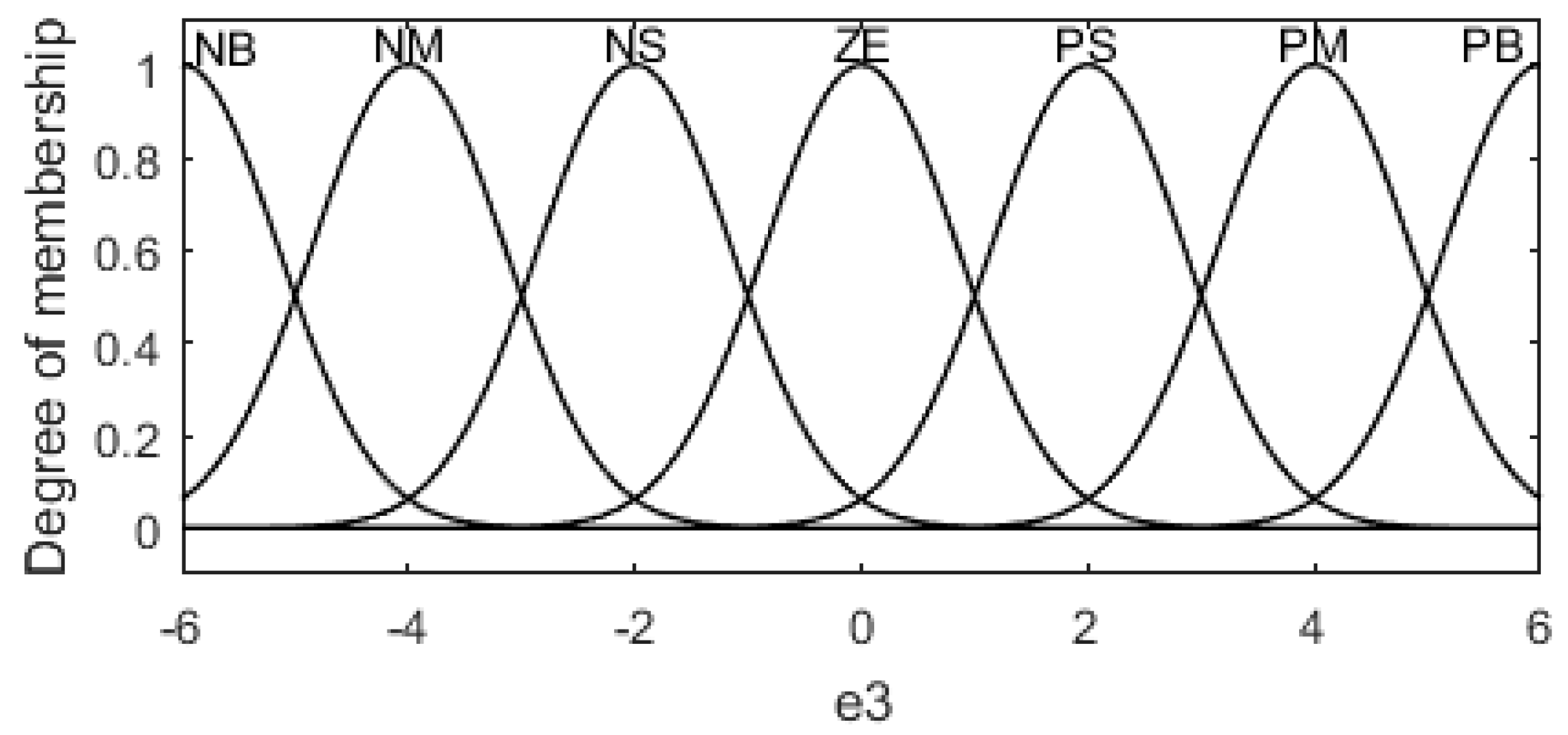
4.2. Fuzzy Self-Tuners
4.3. Stability Analysis
5. Experiment and Discussion
5.1. Experimental Setup
5.2. Experimental Conditions and Methods
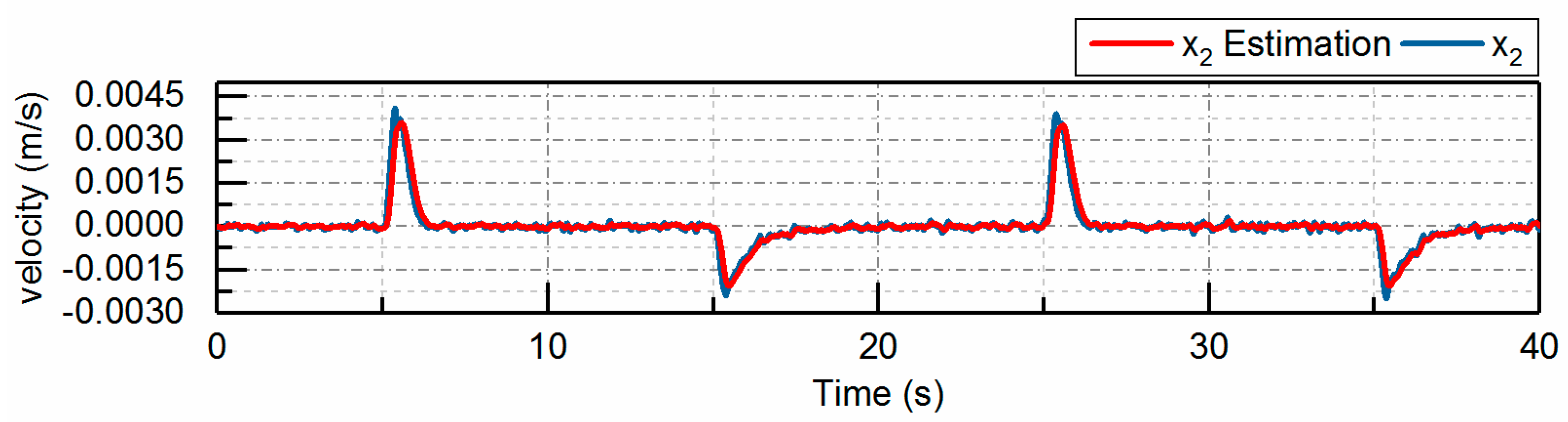
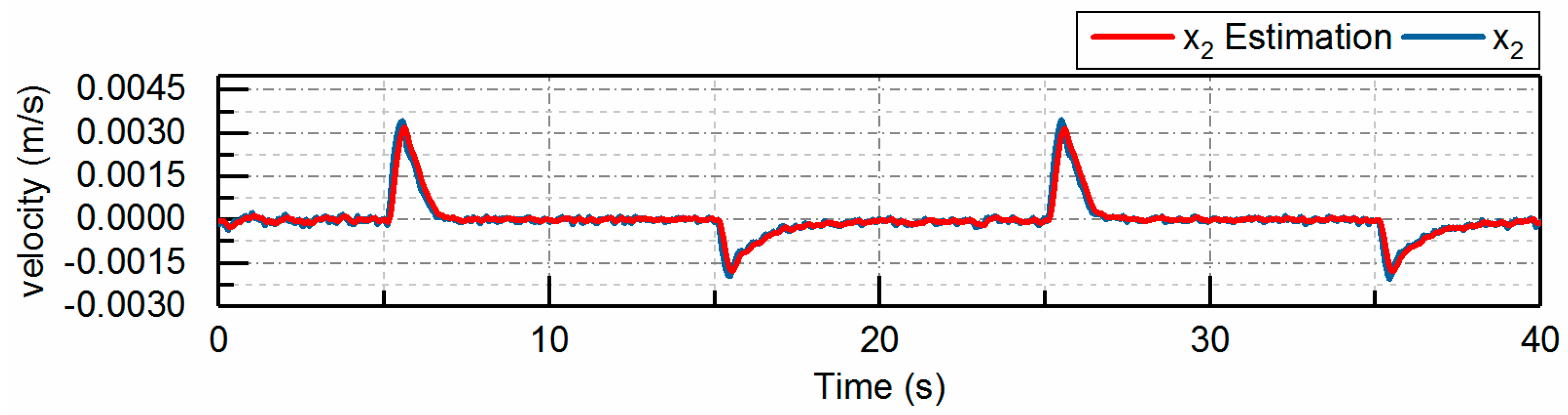
5.3. Effectiveness of the Proposed Method
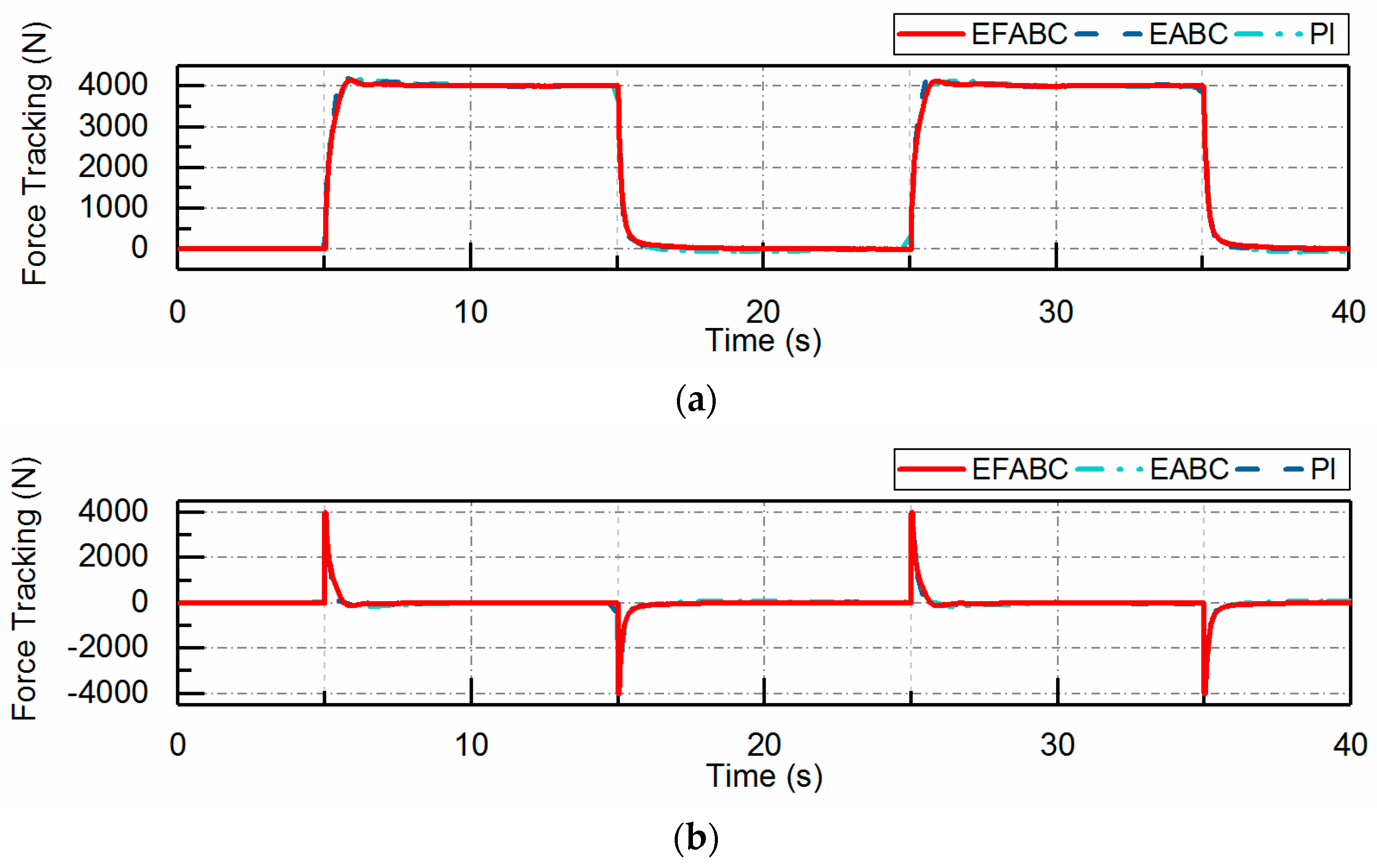
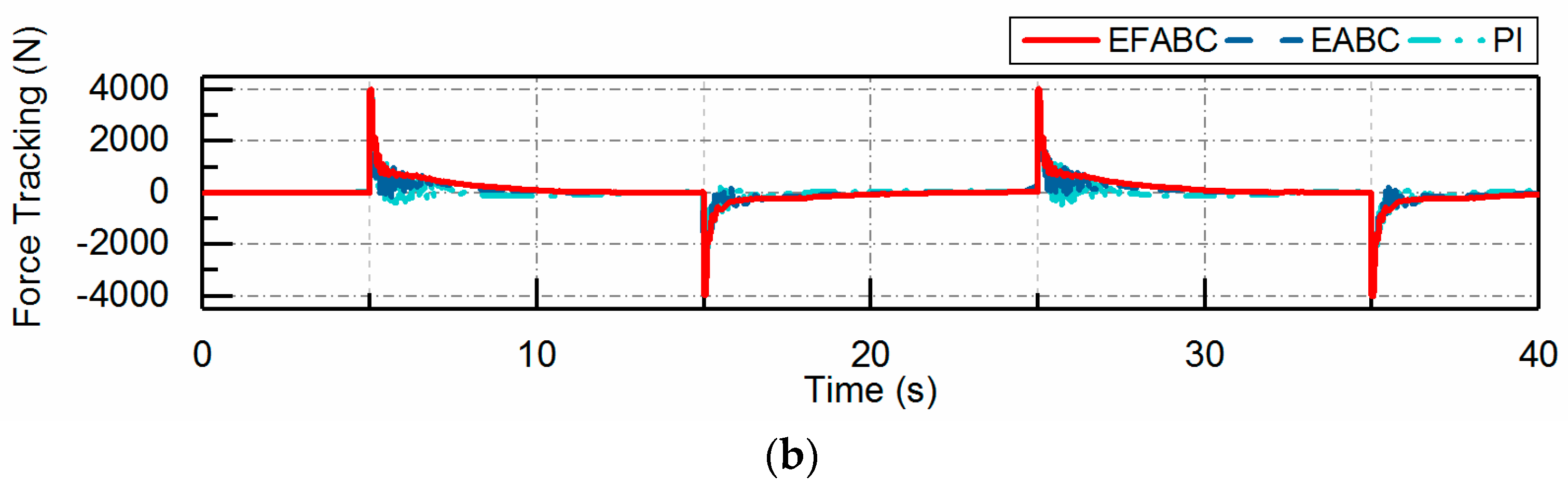
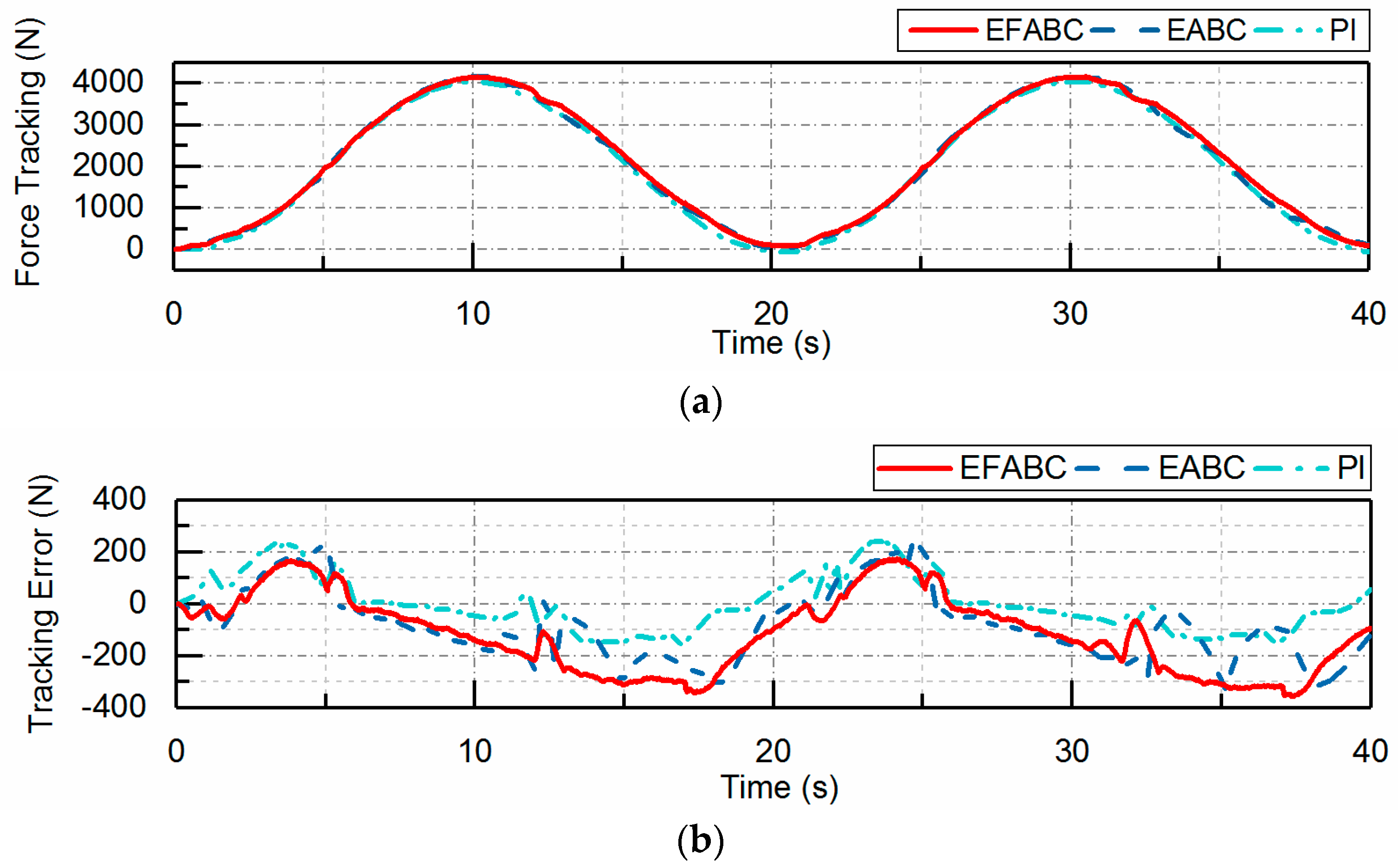
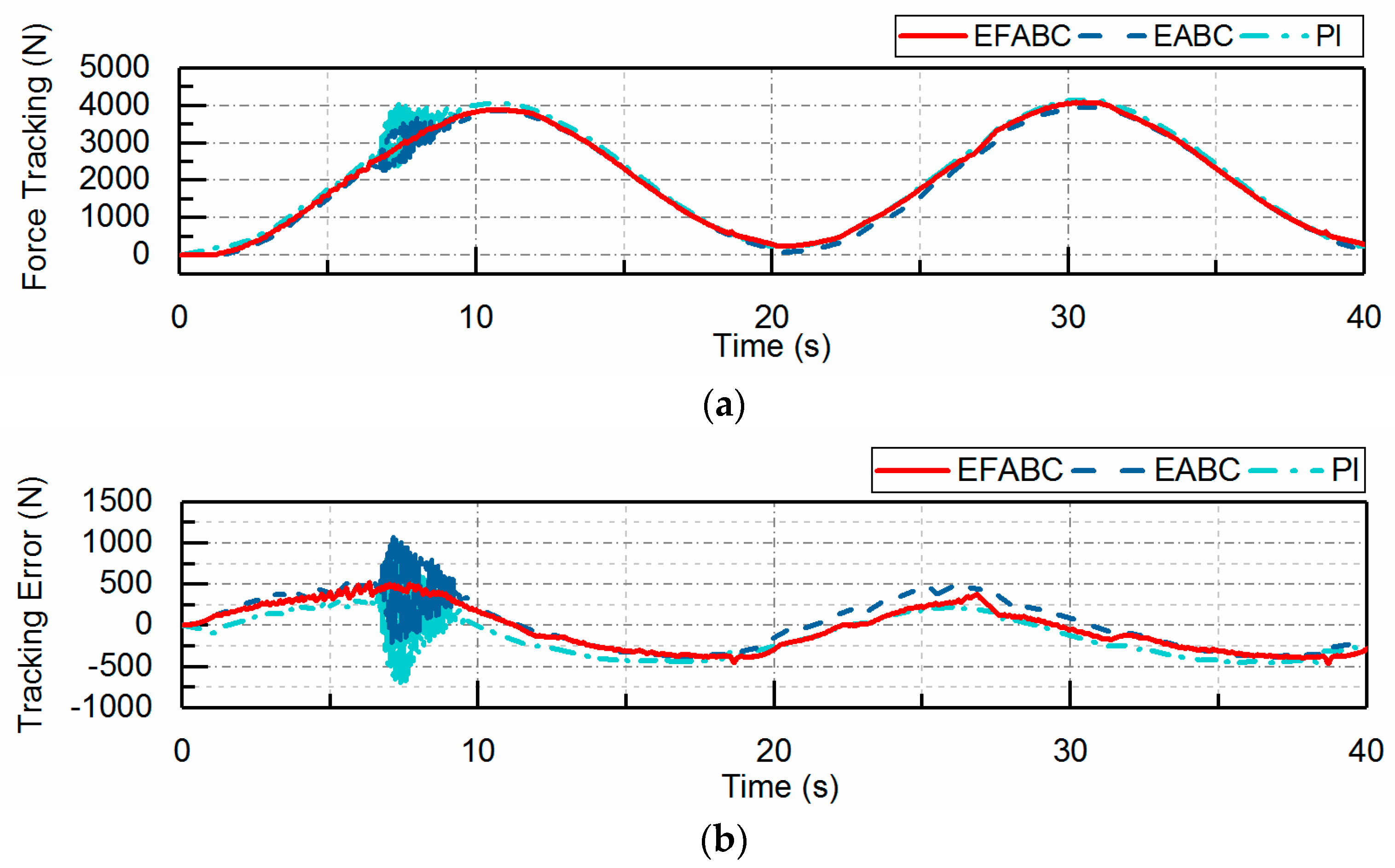
5.4. Comparative Experimental Results
- 1.
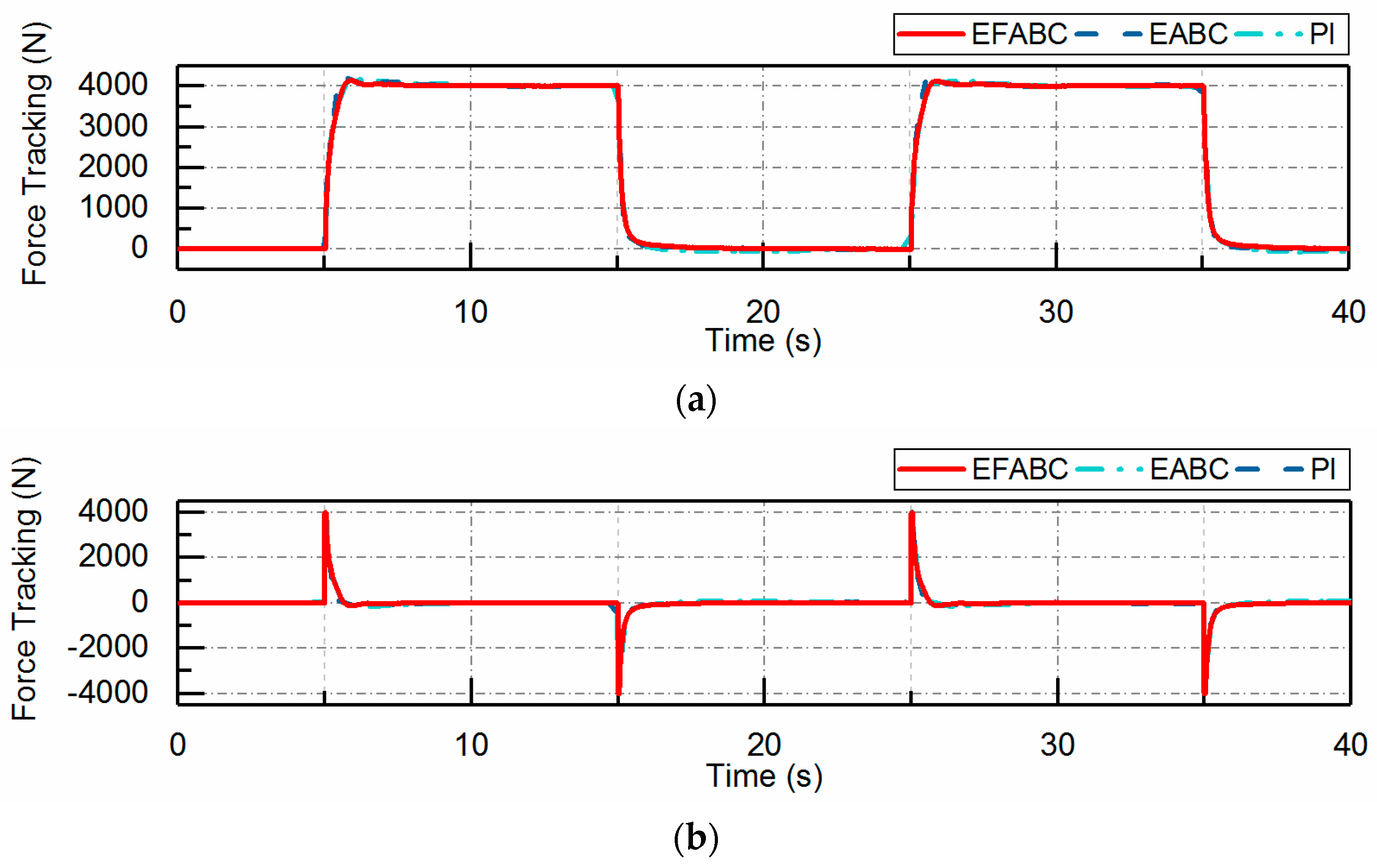
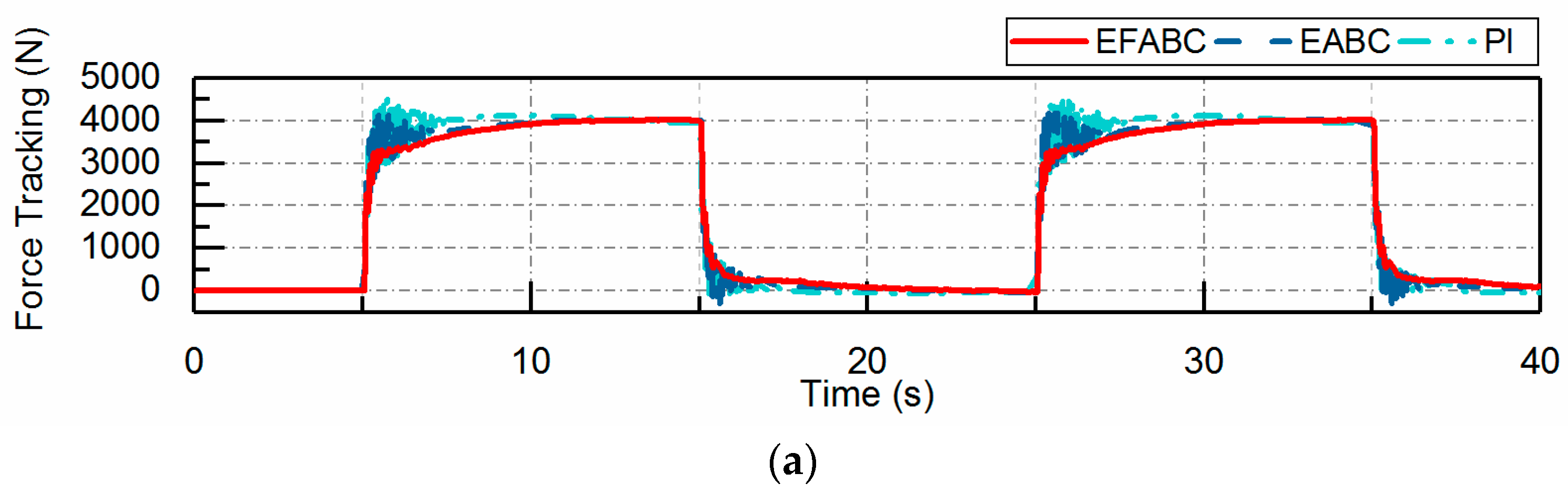
- PI: The proportional–integral controller is commonly applied in industries. The control command is obtained from , and the PI gains are , which achieved good force tracking performance with YH10.
- 2.
- EABC: The extended-state-observer-based adaptive backstepping controller, backstepping technology and adaptive updating law were employed based on an extended state observer to address parameter uncertainties and external disturbances. The control command was computed by (38), in which the gains were and .
- 3.
- EFABC: The extended-state-observer-based fuzzy adaptive backstepping controller with fuzzy logic was employed to design self-tuners, which could automatically adjust the control parameters based on EABC. The initial value of control gains was the same as EABC.
5.4.1. Case I: Square Wave
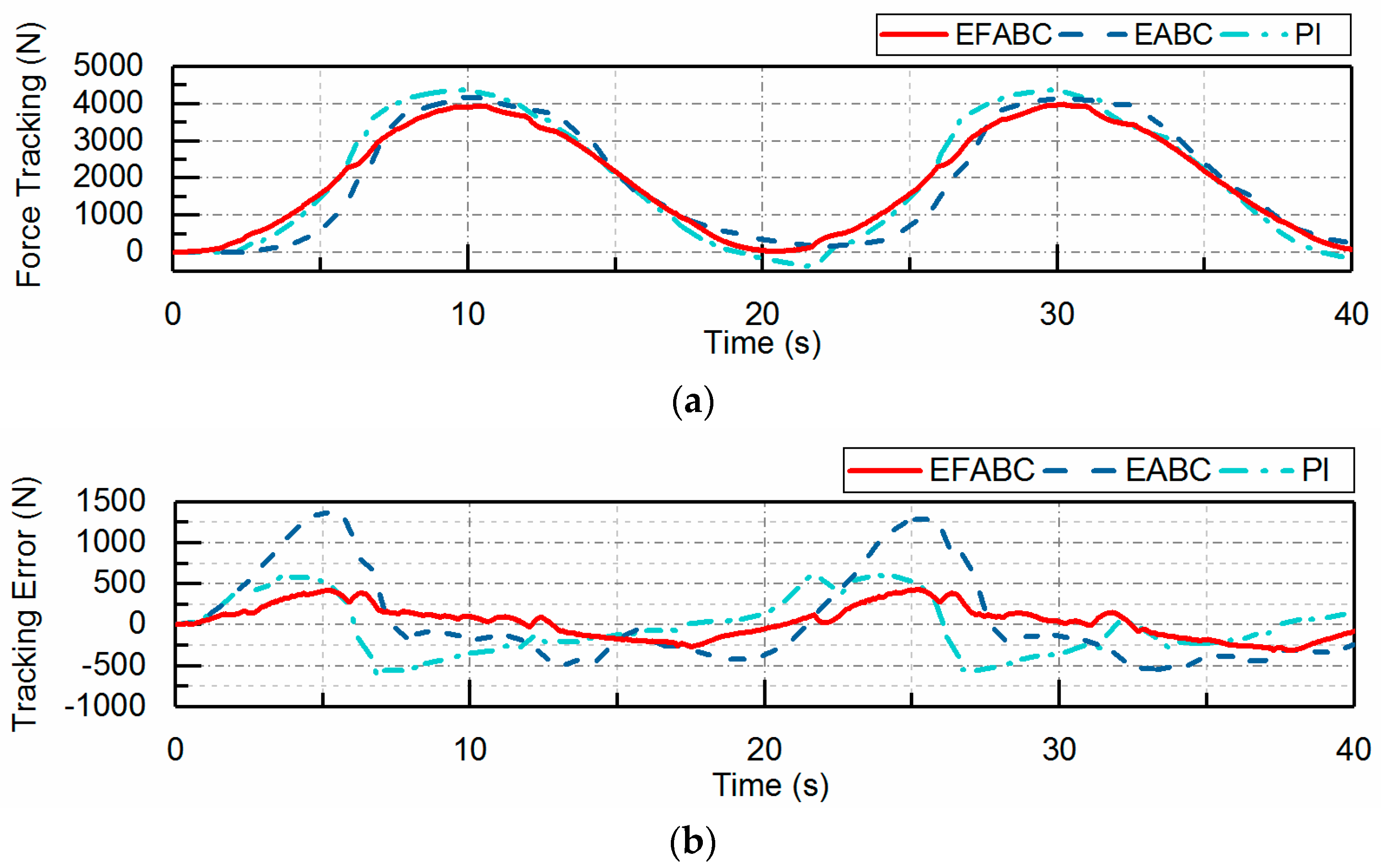
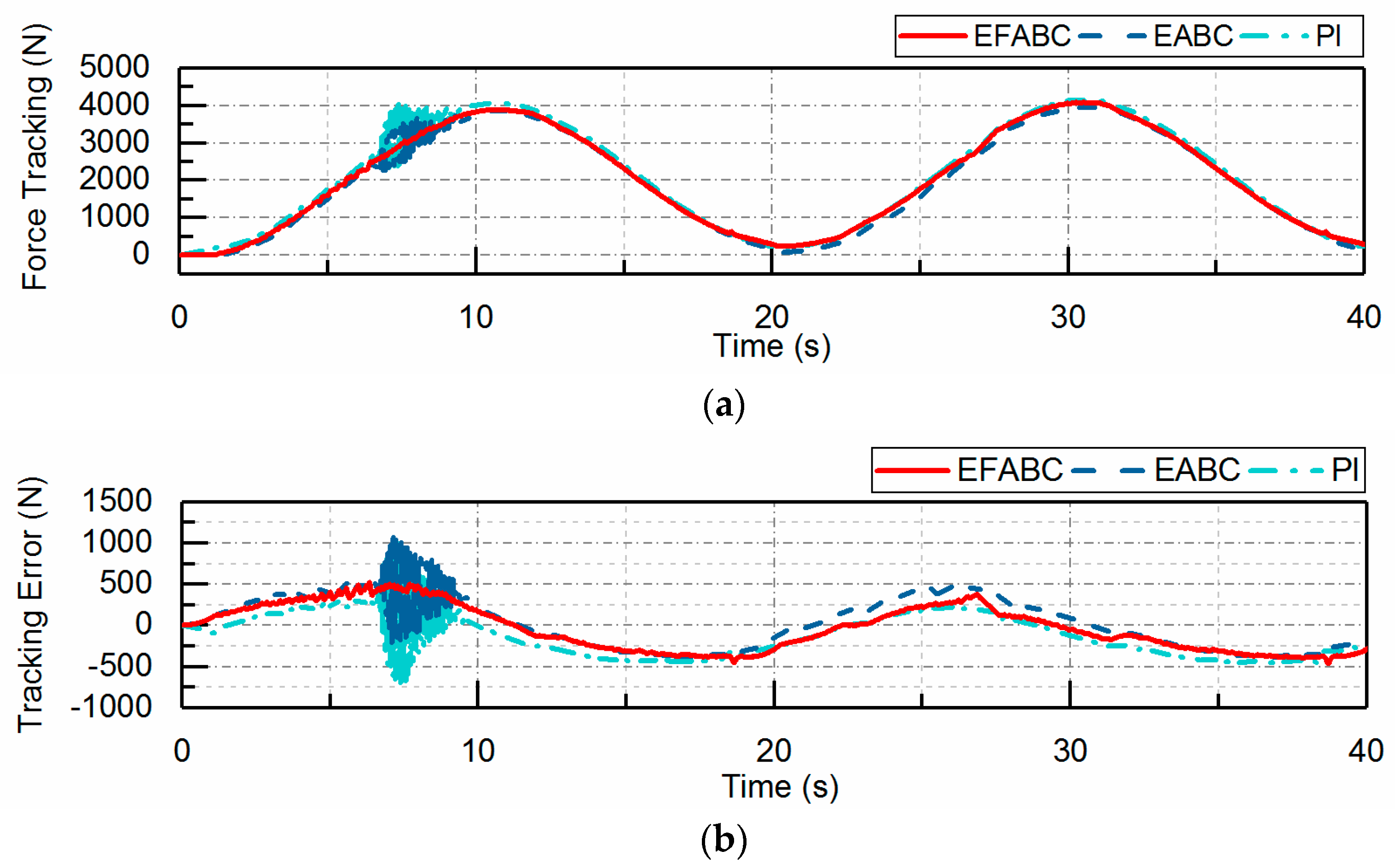
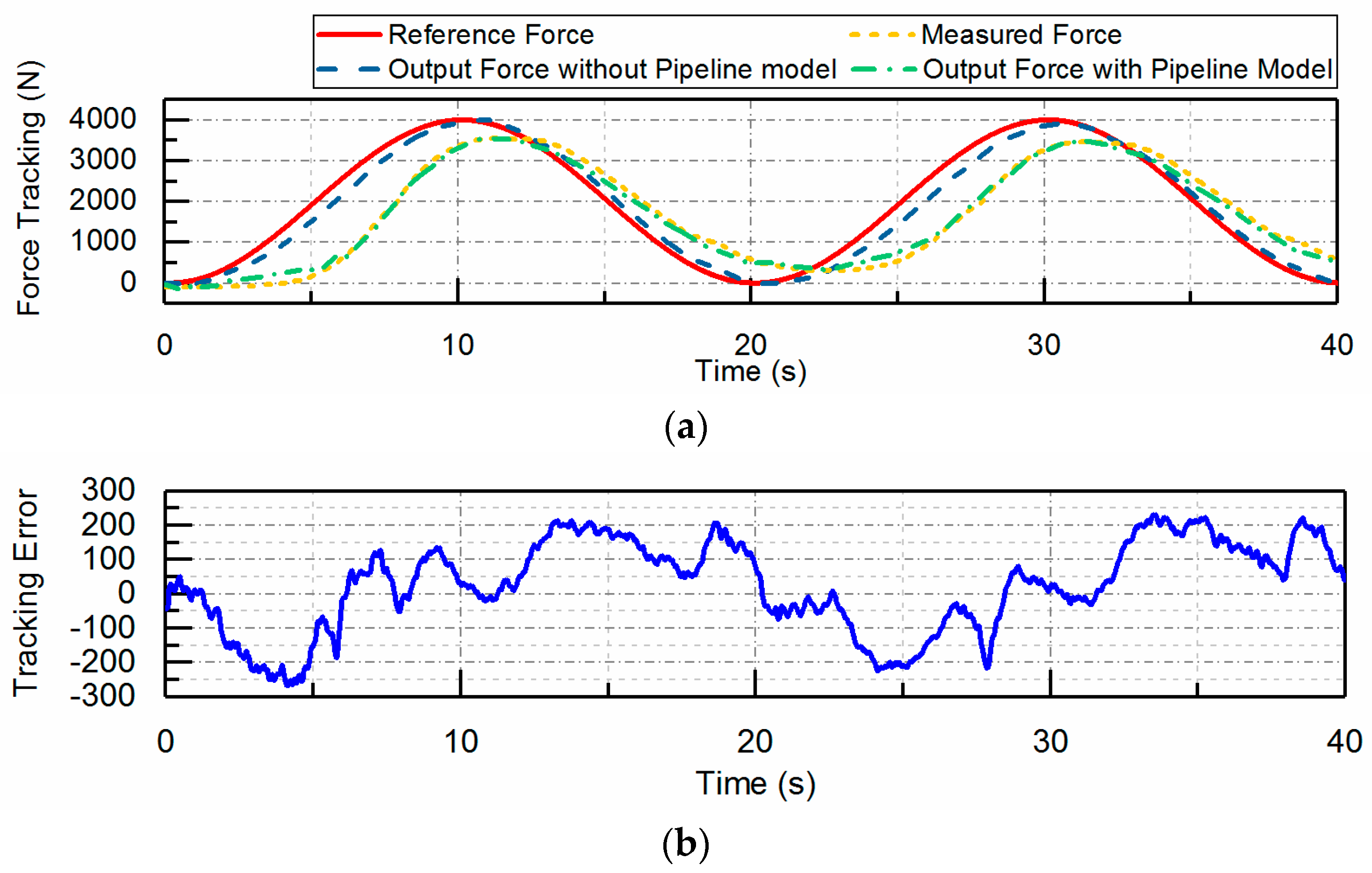
5.4.2. Case II: Sine Wave
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sivčev, S.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Underwater manipulators: A review. Ocean. Eng. 2018, 163, 431–450. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, H.; Li, B.; Cui, S.; Zhao, Y.; Zhu, P.; Sun, B.; Zhang, Z.; Li, Z.; Li, S. Development and Sea Trials of a 6000m Class ROV for Marine Scientific Research, 2018 OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO); IEEE: New York, NY, USA, 2018; pp. 1–6. [Google Scholar]
- Walters, R.B. Hydraulic and Electric-Hydraulic Control Systems; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Brennan, M.L.; Cantelas, F.; Elliott, K.; Delgado, J.P.; Bell, K.L.C.; Coleman, D.; Fundis, A.; Irion, J.; Van Tilburg, H.K.; Ballard, R.D. Telepresence-Enabled Maritime Archaeological Exploration in the Deep. J. Marit. Archaeol. 2018, 13, 97–121. [Google Scholar] [CrossRef]
- Ruff, S.E.; Felden, J.; Gruber-Vodicka, H.R.; Marcon, Y.; Knittel, K.; Ramette, A.; Boetius, A. In situ development of a methanotrophic microbiome in deep-sea sediments. ISME J. 2019, 13, 197–213. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Drap, P.; Seinturier, J.; Hijazi, B.; Merad, D.; Boi, J.-M.; Chemisky, B.; Seguin, E.; Long, L. The ROV 3D Project: Deep-sea underwater survey using photogrammetry: Applications for underwater archaeology. J. Comput. Cult. Herit. (JOCCH) 2015, 8, 1–24. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Q.; Feng, X.; Huo, L.; Tian, Q.; Du, L.; Bai, Y.; Wang, C. Development of a Full Ocean Depth Hydraulic Manipulator System, International Conference on Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 250–263. [Google Scholar]
- Mattila, J.; Siuko, M.; Vilenius, M. On Pressure/Force Control of a 3 Dof Water Hydraulic Manipulator. In Proceedings of the JFPS International Symposium on Fluid Power; The Japan Fluid Power System Society: Tokyo, Japan, 2005; pp. 443–448. [Google Scholar]
- Linjama, M.; Huova, M. Model-based force and position tracking control of a multi-pressure hydraulic cylinder. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 232, 324–335. [Google Scholar] [CrossRef]
- D’Souza, A.F.; Oldenburger, R. Dynamic response of fluid lines. J. Basic Eng. 1964, 86, 589–598. [Google Scholar] [CrossRef]
- Stecki, J.S.; Davis, D.C. Fluid transmission lines—Distributed parameter models part 1: A review of the state of the art. Proc. Inst. Mech. Eng. Part A Power Process Eng. 1986, 200, 215–228. [Google Scholar] [CrossRef]
- Johnston, D.N. A time-domain model of axial wave propagation in liquid-filled flexible hoses. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2006, 220, 517–530. [Google Scholar] [CrossRef]
- Yang, L.; Moan, T. Dynamic analysis of wave energy converter by incorporating the effect of hydraulic transmission lines. Ocean Eng. 2011, 38, 1849–1860. [Google Scholar] [CrossRef]
- Watton, J. Modelling of electrohydraulic systems with transmission lines using modal approximations. Proc. Inst. Mech. Eng. Part B Manag. Eng. Manuf. 1988, 202, 153–163. [Google Scholar] [CrossRef]
- Yang, W.; Tobler, W. Dissipative modal approximation of fluid transmission lines using linear friction model. J. Dyn. Sys. Meas. Control 1991, 113, 152–162. [Google Scholar] [CrossRef]
- Mikota, G. Modal analysis of hydraulic pipelines. J. Sound Vib. 2013, 332, 3794–3805. [Google Scholar] [CrossRef]
- Ayalew, B.; Kulakowski, B.T. Modeling supply and return line dynamics for an electrohydraulic actuation system. ISA Trans. 2005, 44, 329–343. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, Z.-C.; Li, X.; Tang, Y.; Hou, D.-D.; Teng, W.-X. Real-time electro-hydraulic hybrid system for structural testing subjected to vibration and force loading. Mechatronics 2016, 33, 49–70. [Google Scholar] [CrossRef]
- Cheng, L.; Zhu, Z.-C.; Shen, G.; Wang, S.; Li, X.; Tang, Y. Real-Time Force Tracking Control of an Electro-Hydraulic System Using a Novel Robust Adaptive Sliding Mode Controller. IEEE Access 2020, 8, 13315–13328. [Google Scholar] [CrossRef]
- Jing, C.; Xu, H.; Jiang, J. Dynamic surface disturbance rejection control for electro-hydraulic load simulator. Mech. Syst. Signal Process. 2019, 134, 106293. [Google Scholar] [CrossRef]
- Zang, W.; Zhang, Q.; Su, J.; Feng, L. Robust Nonlinear Control Scheme for Electro-Hydraulic Force Tracking Control with Time-Varying Output Constraint. Symmetry 2021, 13, 2074. [Google Scholar] [CrossRef]
- Yuan, H.-B.; Na, H.-C.; Kim, Y.-B. Robust MPC–PIC force control for an electro-hydraulic servo system with pure compressive elastic load. Control Eng. Pract. 2018, 79, 170–184. [Google Scholar] [CrossRef]
- Nakkarat, P.; Kuntanapreeda, S. Observer-based backstepping force control of an electrohydraulic actuator. Control Eng. Pract. 2009, 17, 895–902. [Google Scholar] [CrossRef]
- Li, X.; Zhu, Z.-C.; Rui, G.-C.; Cheng, D.; Shen, G.; Tang, Y. Force Loading Tracking Control of an Electro-Hydraulic Actuator Based on a Nonlinear Adaptive Fuzzy Backstepping Control Scheme. Symmetry 2018, 10, 155. [Google Scholar] [CrossRef]
- Wang, C.; Jiao, Z.; Wu, S.; Shang, Y.J.M. Nonlinear adaptive torque control of electro-hydraulic load system with external active motion disturbance. Mechatronics 2014, 24, 32–40. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, Y.; Celler, B.G.; Su, S.W. Backstepping Control of Electro-Hydraulic System Based on Extended-State-Observer With Plant Dynamics Largely Unknown. IEEE Trans. Ind. Electron. 2016, 63, 6909–6920. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-State-Observer-Based Output Feedback Nonlinear Robust Control of Hydraulic Systems With Backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Zhang, Z.; Duan, G.; Hou, M. Applications, Robust adaptive dynamic surface control of uncertain non-linear systems with output constraints. IET Control Theory Appl. 2017, 11, 110–121. [Google Scholar] [CrossRef]
- Guo, Q.; Liu, Y.; Jiang, D.; Wang, Q.; Xiong, W.; Liu, J.; Li, X. Prescribed Performance Constraint Regulation of Electrohydraulic Control Based on Backstepping with Dynamic Surface. Appl. Sci. 2018, 8, 76. [Google Scholar] [CrossRef] [Green Version]
- Sa, Y.; Zhu, Z.; Tang, Y.; Li, X.; Shen, G. Adaptive dynamic surface control using nonlinear disturbance observers for position tracking of electro-hydraulic servo systems. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. Pract. 2022, 236, 634–653. [Google Scholar] [CrossRef]
- Ahn, K.K.; Truong, D.Q. Online tuning fuzzy PID controller using robust extended Kalman filter. J. Process Control 2009, 19, 1011–1023. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Force control for hydraulic load simulator using self-tuning grey predictor—Fuzzy PID. Mechatronics 2009, 19, 233–246. [Google Scholar] [CrossRef]
- Cerman, O.; Hušek, P. Adaptive fuzzy sliding mode control for electro-hydraulic servo mechanism. Expert Syst. Appl. 2012, 39, 10269–10277. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, Q.; Tian, Q.; Huo, L.; Feng, X. Fuzzy Adaptive Impedance Control for Deep-Sea Hydraulic Manipulator Grasping Under Uncertainties. In Global Oceans 2020: Singapore—U.S. Gulf Coast; IEEE: New York, NY, USA, 2020; pp. 1–6. [Google Scholar]
- Goodson, R.; Leonard, R. A survey of modeling techniques for fluid line transients. J. Basic Eng. 1972, 94, 474–482. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, Y.; Celler, B.G.; Su, S.W. State-Constrained Control of Single-Rod Electrohydraulic Actuator With Parametric Uncertainty and Load Disturbance. IEEE Trans. Control Syst. Technol. 2018, 26, 2242–2249. [Google Scholar] [CrossRef]
- Tian, Q.; Zhang, Q.; Chen, Y.; Huo, L.; Li, S.; Wang, C.; Bai, Y.; Du, L. Influence of Ambient Pressure on Performance of a Deep-sea Hydraulic Manipulator; OCEANS 2019-Marseille; IEEE: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- Xie, F.; Hou, Y. Oil film hydrodynamic load capacity of hydro-viscous drive with variable viscosity. Ind. Lubr. Tribol. 2011, 63, 210–215. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NB | NM | NS | ZO | PS | PM | PB | ||
|---|---|---|---|---|---|---|---|---|
| NB | PB/NB | PB/NB | PM/NM | PM/NM | PS/NS | ZO/NS | ZO/ZO | |
| NM | PB/NB | PB/NB | PM/NM | PM/NM | PS/NS | ZO/ZO | ZO/ZO | |
| MS | PM/NM | PM/NM | PM/NS | PS/NS | ZO/ZO | NS/PS | NM/PS | |
| ZO | PM/NM | PS/NS | PS/NS | ZO/ZO | NS/PS | NM/PS | NM/PM | |
| PS | PS/NS | PS/NS | ZO/ZO | NS/PS | NS/PS | NM/PM | NM/PM | |
| PM | ZO/ZO | ZO/ZO | NS/PS | NM/PM | NM/PM | NM/PB | NB/PB | |
| PB | ZO/ZO | NS/ZO | NS/PS | NM/PM | NM/PM | NB/PB | NB/PB | |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| 1/1068 | 4.66 × 10−4 | ||
| 0.006 | 850 kg/m3 | ||
| 0.004 m | 15 MPa | ||
| 3.474 m | 0 MPa | ||
| 2.375 × 10−3 m2 | 17.8 kg | ||
| 1.885 × 10−3 m2 | 25 | ||
| 7.55 × 10−5 m3 | 5 × 107 N/m | ||
| 7.55 × 10−5 m3 |
| Index | 10 # (0 m) | 32 # (4500 m) | 150 # (11,000 m) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| PI | 4.24 | 3.81% | 8.65 | >10 | - | - | >10 | - | - |
| EABC | 3.50 | 4.72% | 4.99 | >10 | - | - | 5.29 | 6.25% | −1.78 |
| EFABC | 2.24 | 3.16% | 6.19 | 1.31 | 1.13 | 5.89 | 5.88 | 0.60% | −4.22 |
| Index | 10 # (0 m) | 32 # (4500 m) | 150 # (11,000 m) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| PI | 243.52 | −1.59 | 103.83 | 613.15 | −13.88 | 340.91 | 1027.30 | −122.70 | 264.32 |
| EABC | 237.65 | −86.36 | 133.65 | 1373.89 | 60.82 | 561.02 | 1100.31 | 34.49 | 313.21 |
| EFABC | 175.28 | −115.36 | 147.08 | 430.99 | 37.84 | 200.93 | 525.81 | −35.28 | 276.15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Zhang, Q.; Tian, Q.; Feng, X. Extended State Observer-Based Fuzzy Adaptive Backstepping Force Control of a Deep-Sea Hydraulic Manipulator with Long Transmission Pipelines. J. Mar. Sci. Eng. 2022, 10, 1467. https://doi.org/10.3390/jmse10101467
Chen Y, Zhang Q, Tian Q, Feng X. Extended State Observer-Based Fuzzy Adaptive Backstepping Force Control of a Deep-Sea Hydraulic Manipulator with Long Transmission Pipelines. Journal of Marine Science and Engineering. 2022; 10(10):1467. https://doi.org/10.3390/jmse10101467
Chicago/Turabian StyleChen, Yanzhuang, Qifeng Zhang, Qiyan Tian, and Xisheng Feng. 2022. "Extended State Observer-Based Fuzzy Adaptive Backstepping Force Control of a Deep-Sea Hydraulic Manipulator with Long Transmission Pipelines" Journal of Marine Science and Engineering 10, no. 10: 1467. https://doi.org/10.3390/jmse10101467
APA StyleChen, Y., Zhang, Q., Tian, Q., & Feng, X. (2022). Extended State Observer-Based Fuzzy Adaptive Backstepping Force Control of a Deep-Sea Hydraulic Manipulator with Long Transmission Pipelines. Journal of Marine Science and Engineering, 10(10), 1467. https://doi.org/10.3390/jmse10101467