
Robust Adaptive Neural Cooperative Control for the USV-UAV Based on the LVS-LVA Guidance Principle



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem for Formulation and Preliminaries
2.1. Mathematical Model of USV-UAV with Euler–Lagrange Form
2.2. RBF-NNs
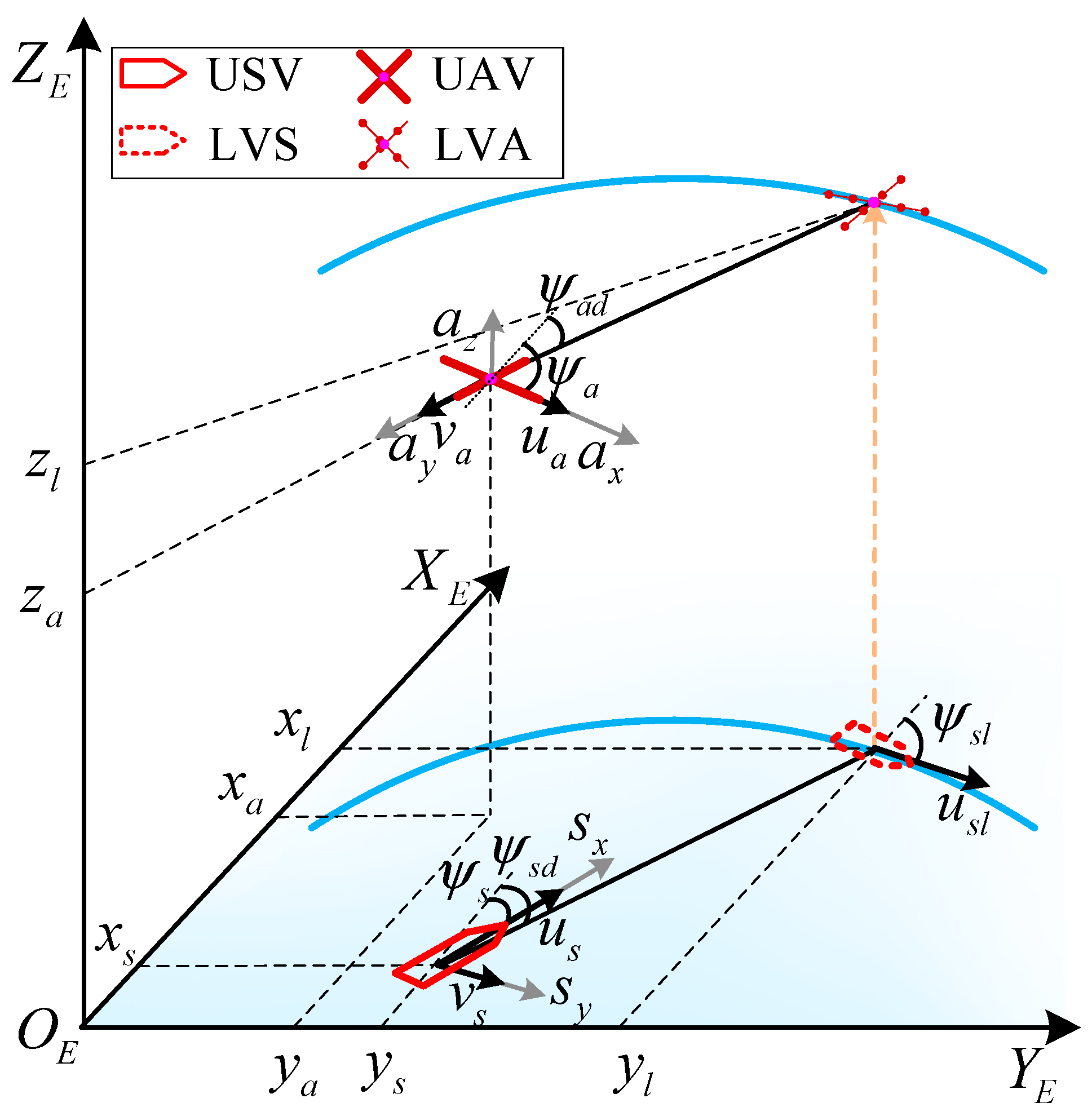
2.3. LVS-LVA Guidance for the USV-UAV System
3. Robust Adaptive Neural Cooperative Controller
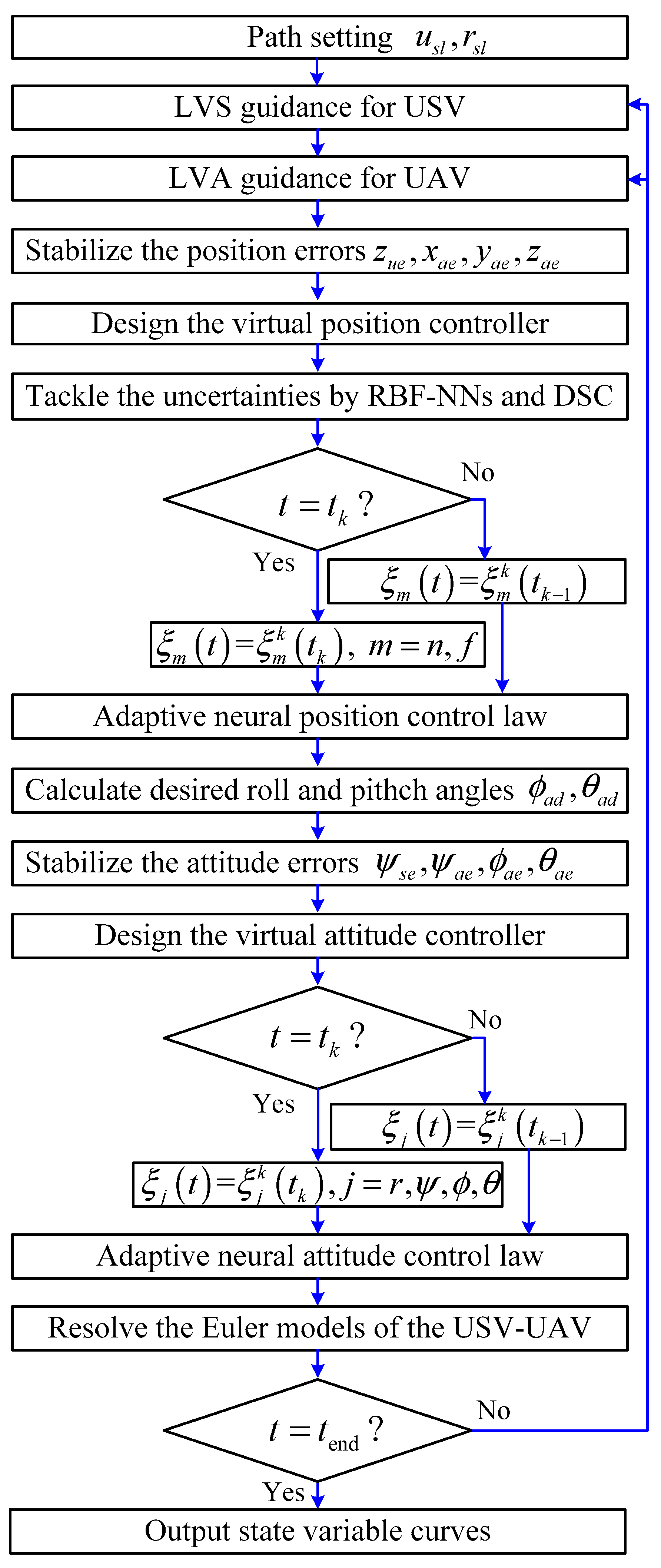
3.1. Control Design
- Step 1: One defines the position error for the USV-UAV system.
- Step 2: According to the relationship between and the attitudes information of the UAV, the reference roll angle and the pitch angle can be deduced as Equation (22) by using the nonlinear decoupling technique.
3.2. Stability Analysis
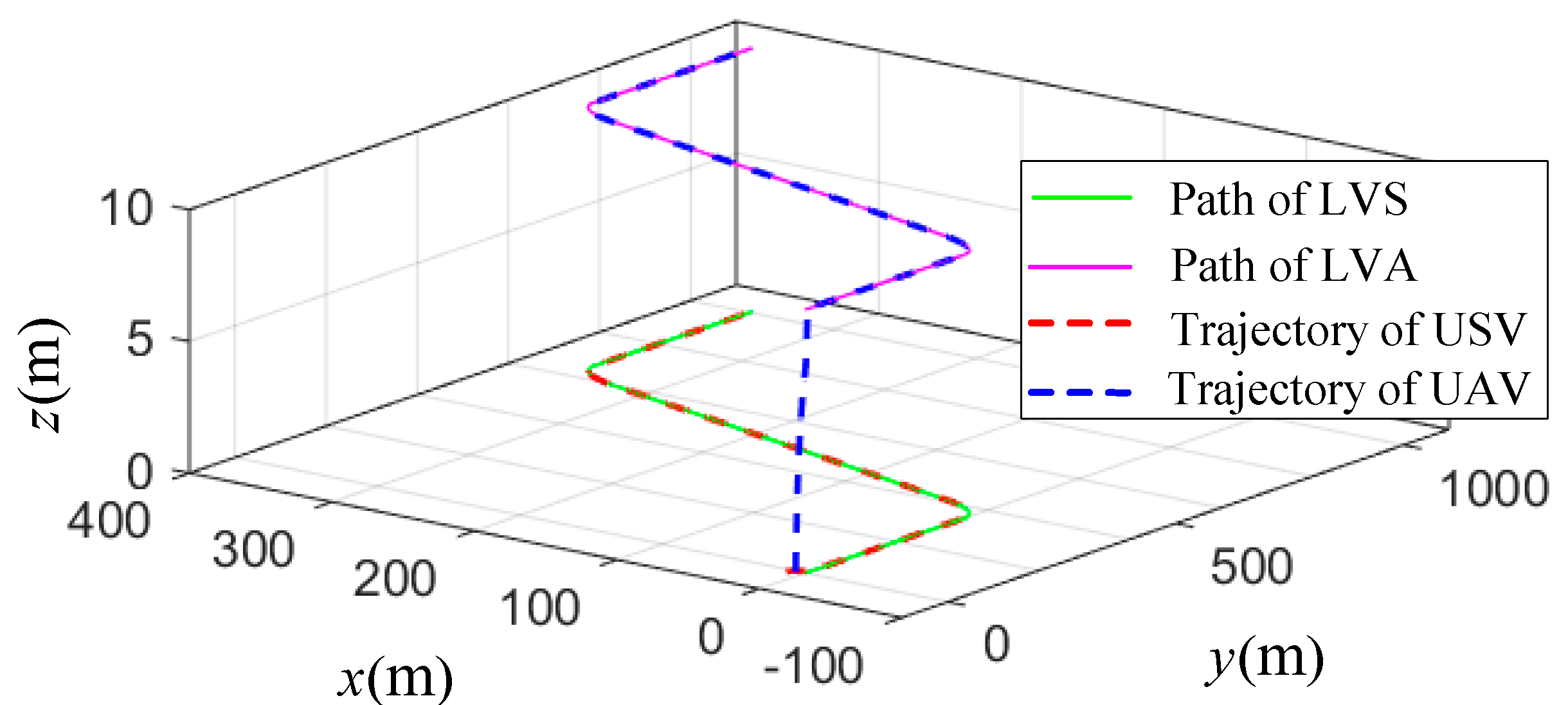
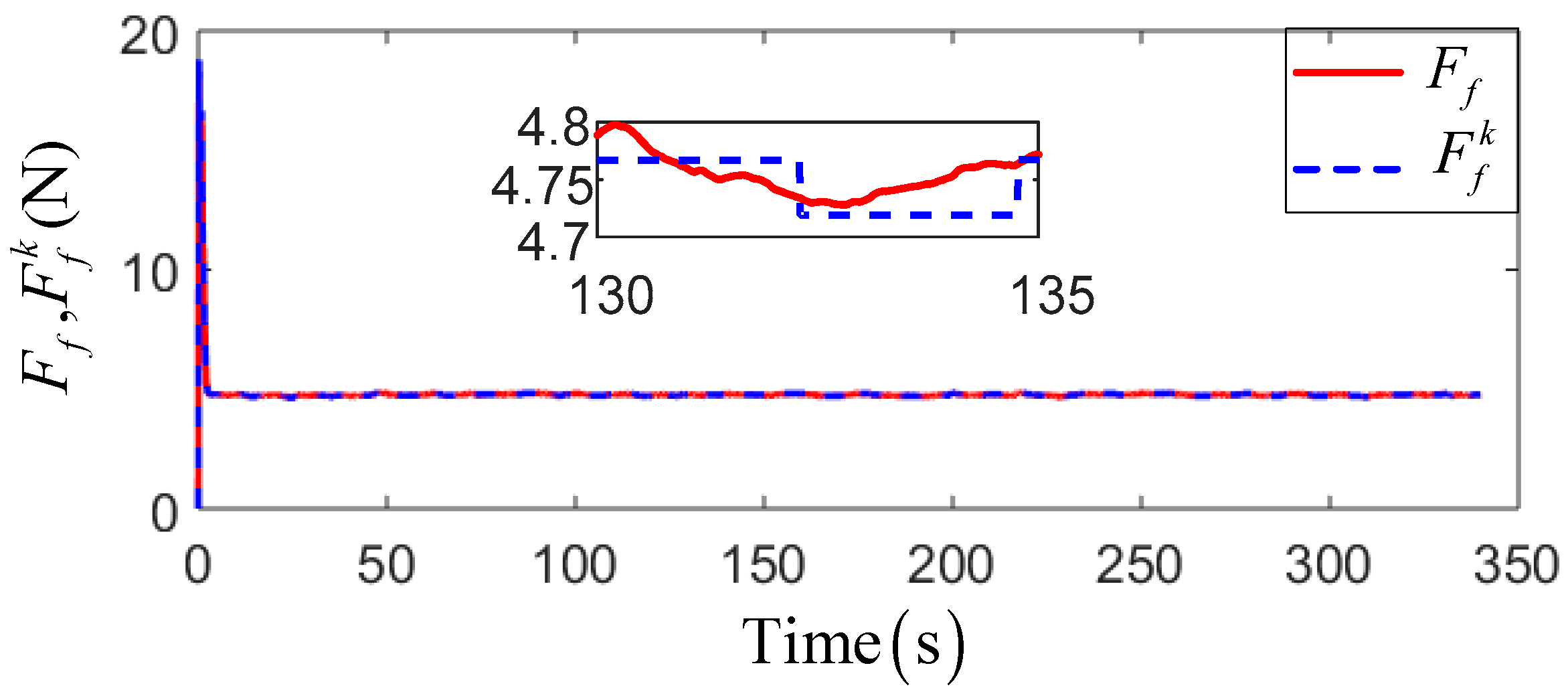
4. Numerical Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Peng, Z.; Wang, J.; Wang, D.; Han, Q.L. An Overview of Recent Advances in Coordinated Control of Multiple Autonomous Surface Vehicles. IEEE Trans. Ind. Inform. 2021, 17, 732–745. [Google Scholar] [CrossRef]
- Yu, Z.; Liu, Z.; Zhang, Y.; Qu, Y.; Su, C.Y. Distributed Finite-Time Fault-Tolerant Containment Control for Multiple Unmanned Aerial Vehicles. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 2077–2091. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Huang, C.; Zhang, W. Event-triggered control for unmanned sailboat with actuator failures. Syst. Eng. Electron. 2021, 43, 1–10. [Google Scholar]
- Huang, C.; Zhang, X.; Zhang, G.; Deng, Y. Robust practical fixed-time leader–follower formation control for underactuated autonomous surface vessels using event-triggered mechanism. Ocean Eng. 2021, 233, 109026. [Google Scholar] [CrossRef]
- Wang, N.; Ki Ahn, C. Hyperbolic-Tangent LOS Guidance-Based Finite-Time Path Following of Underactuated Marine Vehicles. IEEE Trans. Ind. Electron. 2020, 67, 8566–8575. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. ESO-Based Line-of-Sight Guidance Law for Path Following of Underactuated Marine Surface Vehicles with Exact Sideslip Compensation. IEEE J. Ocean Eng. 2017, 42, 477–487. [Google Scholar] [CrossRef]
- Rout, R.; Subudhi, B. Design of Line-of-Sight Guidance Law and a Constrained Optimal Controller for an Autonomous Underwater Vehicle. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 416–420. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, X.; Zhang, G.; Huang, C. Parallel guidance and event-triggered robust fuzzy control for path following of autonomous wing-sailed catamaran. Ocean Eng. 2019, 190, 106442. [Google Scholar] [CrossRef]
- Lekkas, A.M.; Fossen, T.I. Integral LOS Path Following for Curved Paths Based on a Monotone Cubic Hermite Spline Parametrization. IEEE Trans. Control Syst. Technol. 2014, 22, 2287–2301. [Google Scholar] [CrossRef]
- Yu, C.; Xiang, X.; Lapierre, L.; Zhang, Q. Nonlinear guidance and fuzzy control for three-dimensional path following of an underactuated autonomous underwater vehicle. Ocean Eng. 2017, 146, 457–467. [Google Scholar] [CrossRef] [Green Version]
- Zhang, G.; Zhang, X. A novel DVS guidance principle and robust adaptive path-following control for underactuated ships using low frequency gain-learning. ISA Trans. 2015, 56, 75–85. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Deng, Y.; Zhang, W.; Huang, C. Novel DVS guidance and path-following control for underactuated ships in presence of multiple static and moving obstacles. Ocean Eng. 2018, 170, 100–110. [Google Scholar] [CrossRef]
- Zhang, G.; Li, J.; Jin, X.; Liu, C. Robust Adaptive Neural Control for Wing-Sail-Assisted Vehicle via the Multiport Event-Triggered Approach. IEEE Trans. Cybern. 2021. [Google Scholar] [CrossRef]
- Babel, L. Coordinated target assignment and UAV path planning with timing constraints. J. Intell. Robot. Syst. 2019, 94, 857–869. [Google Scholar] [CrossRef]
- Lin, H.-Y.; Peng, X.-Z. Autonomous Quadrotor Navigation with Vision Based Obstacle Avoidance and Path Planning. IEEE Access 2021, 9, 102450–102459. [Google Scholar] [CrossRef]
- Zheng, Z.; Feroskhan, M. Path Following of a Surface Vessel with Prescribed Performance in presence of Input Saturation and External Disturbances. IEEE/ASME Trans. Mechatron. 2017, 22, 2564–2575. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X. Concise robust adaptive path-following control of underactuated ships using DSC and MLP. IEEE J. Ocean Eng. 2014, 39, 685–694. [Google Scholar] [CrossRef]
- Jin, X. Fault tolerant finite-time leader–follower formation control for autonomous surface vessels with LOS range and angle constraints. Automatica 2016, 68, 228–236. [Google Scholar] [CrossRef]
- Xiang, X.; Yu, C.; Lapierre, L.; Zhang, J.; Zhang, Q. Survey on Fuzzy-Logic-Based Guidance and Control of Marine Surface Vehicles and Underwater Vehicles. Int. J. Fuzzy Syst. 2018, 20, 572–586. [Google Scholar] [CrossRef]
- Lu, J.; Yu, S.; Zhu, G.; Zhang, Q.; Chen, C.; Zhang, J. Robust adaptive tracking control of UMSVs under input saturation: A single-parameter learning approach. Ocean Eng. 2021, 234, 108791. [Google Scholar] [CrossRef]
- Deng, Y.; Zhang, X.; Zhang, Q.; Hu, Y. Event-triggered composite adaptive fuzzy control of sailboat with heeling constraint. Ocean Eng. 2020, 211, 107627. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Wong, W.-K. Adaptive Terminal Sliding Mode Control for Attitude and Position Tracking Control of Quadrotor UAVs in the Existence of External Disturbance. IEEE Access 2021, 9, 3428–3440. [Google Scholar] [CrossRef]
- Zhao, H.; Fei, S. The Consensus for Discrete-Time Heterogeneous Networked Systems Consisting of Second-Order Agents and Third-Order Agents. IEEE Access 2018, 6, 14204–14211. [Google Scholar] [CrossRef]
- Wu, Y.; Liu, L. Distributed Average Tracking for Linear Heterogeneous Multi-Agent Systems with External Disturbances. IEEE Trans. Netw. Sci. Eng. 2021, 8, 3491–3500. [Google Scholar] [CrossRef]
- Guo, M.; Xu, D.; Liu, L. Design of Cooperative Output Regulators for Heterogeneous Uncertain Nonlinear Multiagent Systems. IEEE Trans. Cybern. 2020. [Google Scholar] [CrossRef] [PubMed]
- Duan, M.; Liu, C.; Liu, F. Event-Triggered Consensus Seeking of Heterogeneous First-Order Agents with Input Delay. IEEE Access 2017, 5, 5215–5223. [Google Scholar] [CrossRef]
- Huang, D.; Li, H.; Li, X. Formation of Generic UAVs-USVs System under Distributed Model Predictive Control Scheme. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 3123–3127. [Google Scholar] [CrossRef]
- Gonzalez-Garcia, A.; Miranda-Moya, A.; Castañeda, H. Robust Visual Tracking Control Based on Adaptive Sliding Mode Strategy: Quadrotor UAV—Catamaran USV Heterogeneous System. In Proceedings of the International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 666–672. [Google Scholar]
- Shao, G.; Ma, Y.; Malekian, R.; Yan, X.; Li, Z. A Novel Cooperative Platform Design for Coupled USV–UAV Systems. IEEE Trans. Ind. Inform. 2019, 15, 4913–4922. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Li, X. Distributed Consensus of Heterogeneous Linear Time-Varying Systems on UAVs–USVs Coordination. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 1264–1268. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust adaptive Backstepping fast terminal sliding mode controller for uncertain quadrotor UAV. Aerosp. Sci. Technol. 2019, 93, 105306. [Google Scholar] [CrossRef]
- Wang, W.; Li, Y.; Tong, S. Neural-Network-Based Adaptive Event-Triggered Consensus Control of Non-Strict Feedback Nonlinear Systems. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 1750–1764. [Google Scholar] [CrossRef] [PubMed]
- Zhou, W.; Wang, Y.; Ahn, C.K.; Cheng, J.; Chen, C. Adaptive Fuzzy Backstepping-Based Formation Control of Unmanned Surface Vehicles with Unknown Model Nonlinearity and Actuator Saturation. IEEE Trans. Veh. Technol. 2020, 69, 14749–14764. [Google Scholar] [CrossRef]
- Wen, C.; Jing, Z.; Liu, Z.; Su, H. Robust Adaptive Control of Uncertain Nonlinear Systems in presence of Input Saturation and External Disturbance. IEEE Trans. Autom. Control 2011, 56, 1672–1678. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Zhang, G.; Li, B. Robust Adaptive Neural Cooperative Control for the USV-UAV Based on the LVS-LVA Guidance Principle. J. Mar. Sci. Eng. 2022, 10, 51. https://doi.org/10.3390/jmse10010051
Li J, Zhang G, Li B. Robust Adaptive Neural Cooperative Control for the USV-UAV Based on the LVS-LVA Guidance Principle. Journal of Marine Science and Engineering. 2022; 10(1):51. https://doi.org/10.3390/jmse10010051
Chicago/Turabian StyleLi, Jiqiang, Guoqing Zhang, and Bo Li. 2022. "Robust Adaptive Neural Cooperative Control for the USV-UAV Based on the LVS-LVA Guidance Principle" Journal of Marine Science and Engineering 10, no. 1: 51. https://doi.org/10.3390/jmse10010051
APA StyleLi, J., Zhang, G., & Li, B. (2022). Robust Adaptive Neural Cooperative Control for the USV-UAV Based on the LVS-LVA Guidance Principle. Journal of Marine Science and Engineering, 10(1), 51. https://doi.org/10.3390/jmse10010051