
KISS (Keep It Sustainable and Smart): A Research and Development Program for a Zero-Emission Small Crafts




Abstract
1. Introduction
- Commercial ships, mainly ro-ro ships, that operate in a zero-emission mode in the short-term while in a harbor or protected areas;
- Small passenger or pleasure crafts with limited range and speed that always operate at zero emission.
2. Zero-Emission Small Craft
3. Mission Profile
4. Main Features of Zero-Emission Propulsion for Small Crafts
4.1. Main Engines
4.2. Energy Storage
4.2.1. Batteries
- AGM battery (absorbent glass mat): batteries in which the electrolyte is a mixture of water and sulphuric acid absorbed by fiberglass elements. They are maintenance-free and normally do not produce gas. They can be located anywhere on board, and forced ventilation is usually not necessary. Thanks to their structure, AGM batteries can be discharged quickly, and they are suitable for systems where high current peaks are required, i.e., engine start up;
- Gel batteries: batteries where the electrolyte is absorbed in a gel. They are maintenance-free and do not produce gas. Since forced ventilation is not normally required, gel batteries can be located anywhere on the boat. They are ideal as service batteries and for cyclic use and recharge very quickly;
- Lithium-ion batteries: batteries that have a high energy density and guarantee savings of up to 70% in weight and dimensions compared to traditional lead-acid batteries. They are perfect for cyclic applications, being able to withstand more than 2000 deep discharge cycles (80%) and store five times more energy over their life cycle than lead-acid batteries. Battery technology is improving rapidly and is predicted to become more mass and volume efficient in the coming years. Currently, for shipboard propulsion, Li-ion batteries offer the highest energy density, a suitable power density, high efficiency, and an acceptable lifetime.
- Density of energy for a weight unit ranging from 50 to 260 Wh/kg;
- Density of energy for a volume ranging from 250 to 670 Wh/L;
- Life of the battery (number of cycles) ranging from 500 to 1500;
- Disposal at the end of the working life;
- Intrinsic efficiency of the charge–discharge ranging from 80% to 90%;
- Depth of discharge (DOD) ranging from 80 to 90.
4.2.2. Charge
5. Hydrodynamic Issues Related to the Zero-Emission Mode
6. Construction
7. Regulatory Framework and Safety of Zero-Emission Small Craft
- ISO 10133 for direct current system installations that operate at a rated voltage not exceeding 50 V;
- ISO 13297 for single-phase alternating current installations that operate at a rated voltage not exceeding 250 V;
- IEC 60092-507 (Ed. 2000) for three-phase alternating current systems that operate at a rated voltage not exceeding 500 V.
- For the builder: Great flexibility in design choices and the possibility of introducing highly innovative technologies;
- For the customer/shipowner: Great added value given by a prestigious environmental certification; savings on operating costs thanks to the adoption of consumption reduction solutions;
- For the passengers: The guarantee of sailing on an environmentally friendly yacht, within additional class notation.
8. KISS Program
8.1. Hull Form
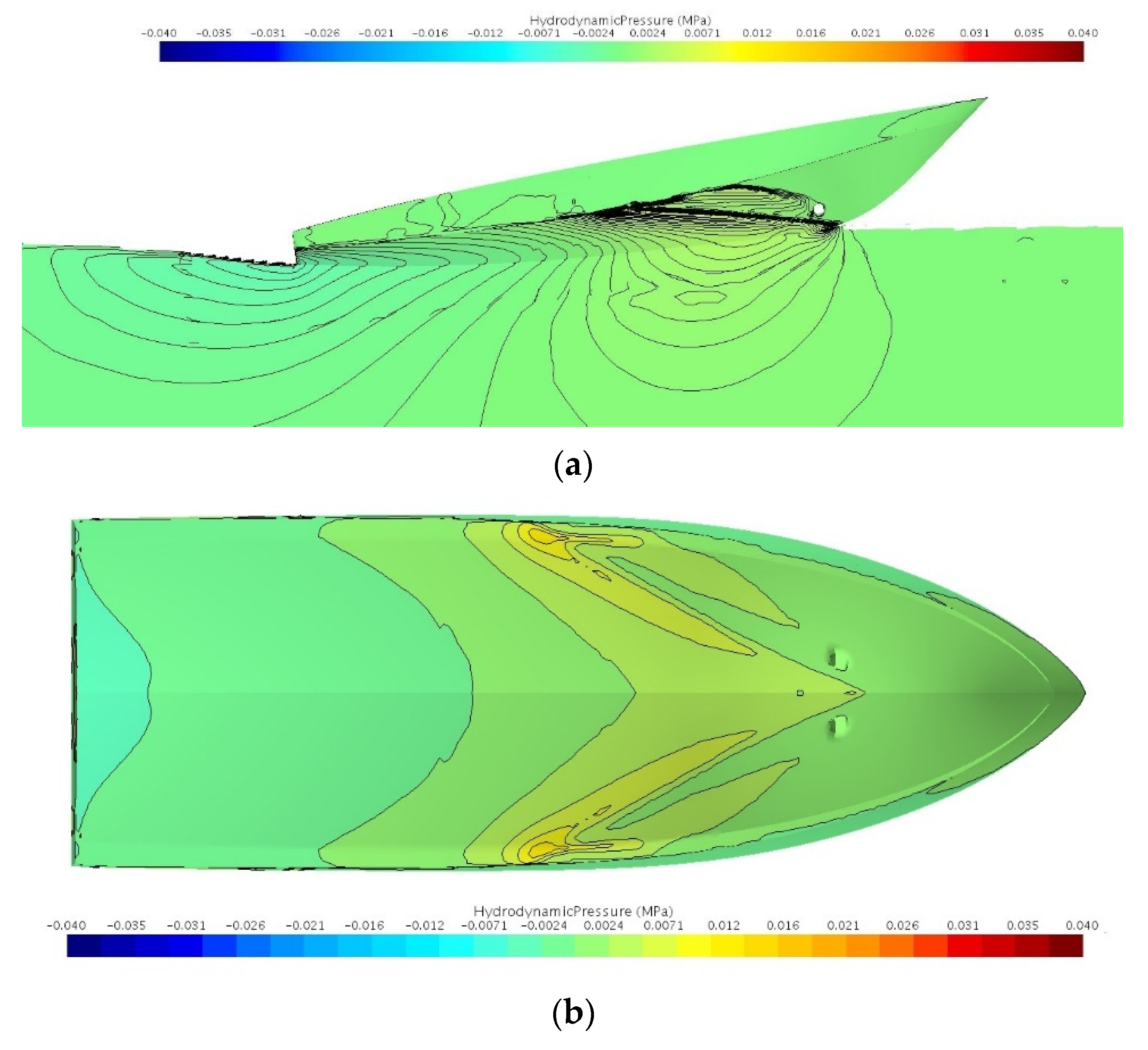
8.2. Speed Predictions via CFD Analysis
Results
8.3. Propulsion
8.4. Energy Storage
8.5. Construction
9. Discussion and Conclusions
Author Contributions
Funding
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Report of the World Commission on Environment and Development: Our Common Future Transmitted to the General Assembly of UN as an Annex to Document A/42/427—Development and International Cooperation: Environment. 1987. Available online: https://www.are.admin.ch/are/it/home/media-e-pubblicazioni/pubblicazioni/sviluppo-sostenibile/brundtland-report.html (accessed on 10 September 2021).
- Shama, M.A. Life cycle assessment of ships. Maritime Transportation and Exploitation of Ocean and Coastal Resources. In Proceedings of the 11th International Congress of the International Maritime Association of the Mediterranean, Lisbon, Portugal, 26–30 September 2005; Guedes Soares, C., Garbatov, Y., Fonseca, N., Eds.; Taylor & Francis Group: London, UK, 2005. ISBN 0-415-39036-2. [Google Scholar]
- Birmingham, R.W.; Landamore, M.J.; Wright, P.N.H.; Downie, M.J. Investigation of sustainable technologies for the design, construction, operation and decommissioning of recreational craft. In Proceedings of the 19th International HISWA Symposium on Yacht Design and Yacht Construction, Amsterdam, The Netherland, 13–14 November 2006; pp. 35–48. [Google Scholar]
- Strategic Research and Innovation Agenda for the Partnership on Zero-Emission Waterborne Transport. Technical Platform: Waterborne, June 2021. Available online: https://www.waterborne.eu/images/210601_SRIA_Zero_Emission_Waterborne_Transport_1.2_final_web_low.pdf (accessed on 30 November 2021).
- A Zero Emission Blueprint for Shipping. International Chamber of Shipping in collaboration with Ricardo, November 2021. Available online: https://www.ics-shipping.org/wp-content/uploads/2021/11/A-zero-emission-blueprint-for-shipping.pdf (accessed on 30 November 2021).
- Mestemaker, B.; van den Heuvel, H.; Gonçalves Castro, B. Designing the Zero Emission Vessels of the Future: Technologic, Economic and Environmental Aspects. Int. Shipbuild. Prog. 2020, 67, 5–31. [Google Scholar] [CrossRef]
- Fahnestock, J.; Bingham, C. Mapping of Zero Emission Pilots and Demonstration Projects, 2nd ed.; Getting to Zero Coalition: Copenhagen, Denmark, 2021. [Google Scholar]
- Kozian, T.; John, A. Electric Ferries in the Baltic Sea Region, Compendium; BSR Electric, ATI Küste GmbH—Gesellschaft für Technologie und Innovation (Association for Technology and Innovation): Rostock, Germany, 2020. [Google Scholar]
- Begovic, E.; Bertorello, C. Full Electric Work Boat. In Proceedings of the 12th Symposium on High-Performance Marine Vehicles HIPER’20 Cortona, Hamburg, Germany, 12–14 October 2020; pp. 333–444, ISBN 978-3-89220-718-4. [Google Scholar]
- Begovic, E.; Bertorello, C. Zero Emission Sustainable Craft for Coastal Marine Protected Areas. In Proceedings of the Convegno Annuale Internazionale AEIT 2016 108.a Edizione—Capri, Naples, Italy, 5–7 October 2016. [Google Scholar]
- Papanikolaou, A.D. Review of the Design and Technology Challenges of Zero-Emission Battery-Driven Fast Marine Vehicles. J. Mar. Sci. Eng. 2020, 8, 941. [Google Scholar] [CrossRef]
- Mauro, F.; la Monaca, U.; Marinò, A.; Bucci, V. A Simulation Model for a Hybrid-Electric Craft in Restricted Waters. J. Adv. Trans. 2020, 8, 941. [Google Scholar] [CrossRef]
- Umeda, A.; Shimizu, E.; Oode, T. Design strategy of Battery Powered Boat and its evaluation. In Proceedings of the Twenty-fifth International Ocean and Polar Engineering Conference Kona, Big Island, HI, USA, 21–26 June 2015; pp. 911–917. [Google Scholar]
- Sundvor, I.; Thorne, R.Y.; Danebergs, J.; Aarskog, F.; Weber, C. Estimating the replacement potential of Norwegian high-speed passenger vessels with zero-emission solutions. Transp. Res. Part D Transp. Environ. 2021, 99, 103019. [Google Scholar] [CrossRef]
- Łapko, A. The Use of Auxiliary Electric Motors in Boats and Sustainable Development of Nautical Tourism—Cost Analysis, the Advantages and Disadvantages of Applied Solutions. Transp. Res. Procedia 2016, 16, 323–328. [Google Scholar] [CrossRef]
- Palconit, E.V.; Abundo, M.L.S. Electric Ferry Ecosystem for Sustainable Inter-Island Transport in Philippines: A Pilot Study. Eng. Technol. Appl. Sci. Res. 2018, 8, 3570–3575. [Google Scholar] [CrossRef]
- Tveitdal, T. Market Barriers towards Electric Boat. Department of Design Norwegian University of Science and Technology. Available online: https://www.ntnu.edu/documents/139799/1279149990/33+Article+Final_trulstv_fors%C3%B8k_2017-12-07-17-25-18_TPD4505+Truls+Tveitdal.pdf/4523bd20-1024-4179-8dde-878d847a7e29 (accessed on 30 November 2021).
- Hemez, C.; Chiu, J.; Ryan, E.C.; Sun, J.; Dubrow, R.; Pascucilla, M. Environmental and health impacts of electric service vessels in the recreational boating industry. Water Pract. Technol. 2020, 15, 781–796. [Google Scholar] [CrossRef]
- Zero-Emission Autonomous Ferries for Urban Water Transport: Cheaper, Cleaner Alternative to Bridges and Manned Vessels. IEEE Electrif. Mag. 2019, 7, 32–45. [CrossRef]
- Spagnolo, G.S.; Papalillo, D.; Martocchia, A.; Makary, G. Solar-Electric Boat. J. Transp. Technol. 2012, 2, 144–149. [Google Scholar] [CrossRef]
- Kurniawan, A. A Review of Solar-Powered Boat Development. IPTEK J. Technol. Sci. 2016, 27, 1. [Google Scholar] [CrossRef]
- Nasirudin, A.; Chao, R.; Utama, I.K.A.P. Solar Powered Boat Design Optimization. Procedia Eng. 2017, 194, 260–267. [Google Scholar] [CrossRef]
- Sunaryo; Nurachman, D.; Imfianto, P.S. Design and calculation of mechanical system for solar-powered electric boat. In Proceedings of the 2nd International Tropical Renewable Energy Conference (i-TREC), Bali, Indonesia, 3–4 October 2017. IOP Conference Series: Earth and Environmental Science Corpus ID: 134425116. [Google Scholar] [CrossRef]
- Mutarraf, M.U.; Terriche, Y.; Niazi, K.A.K.; Vasquez, J.C.; Guerrero, J.M. Energy Storage Systems for Shipboard Microgrids—A Review. Energies 2018, 11, 3492. [Google Scholar] [CrossRef]
- Lee, D.K.; Jeong, Y.K.; Shin, J.G.; Oh, D.K. Optimized design of electric propulsion system for small crafts using the differential evolution algorithm. Int. J. Precis. Eng. Manuf.-Green Tech. 2014, 1, 229–240. [Google Scholar] [CrossRef][Green Version]
- Papanikolaou, A.; Xing-Kaeding, Y.; Strobel, J.; Kanellopoulou, A.; Zaraphonitis, G.; Tolo, E. Numerical and Experimental Optimization Study on a Fast, Zero Emission Catamaran. J. Mar. Sci. Eng. 2020, 8, 657. [Google Scholar] [CrossRef]
- Caprara, G.; Martirano, L.; Balletta, C. Preliminary Analysis of the Conversion of a Leisure Boat into a Battery Electric Vehicle (BEV). In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–6. [Google Scholar]
- Surface Effect Ships Europe As. Final Report Summary—BB GREEN (Battery Powered Boats, Providing Greening, Resistance Reduction, Electric, Efficient and Novelty). 2015. Available online: https://cordis.europa.eu/project/id/234124/reporting/it (accessed on 16 December 2021).
- European Union’s Horizon2020 Research and Innovation Programme. TrAM—Transport: Advanced and Modular. 2020. Available online: https://tramproject.eu/ (accessed on 16 December 2021).
- Shi, G.; Priftis, A.; Xing-Kaeding, Y.; Boulougouris, E.; Papanikolaou, A.D.; Wang, H.; Symonds, G. Numerical investigation of the full-scale resistance of a zero-emission fast catamaran in shallow water. J. Mar. Sci. Eng. 2021, 9, 563. [Google Scholar] [CrossRef]
- Boulougouris, E.; Papanikolaou, A.; Dahle, M.; Tolo, E.; Xing-Kaeding, Y.; Jürgenhake, C.; Seidenberg, T.; Sachs, C.; Brown, G.; Jenset, F. Implementation of Zero Emission Fast Short sea Shipping. In Proceedings of the SNAME Maritime Convention, SMC2021, Providence, RI, USA, 25–29 October 2021. [Google Scholar]
- Boulougouris, E.; Priftis, A.; Mikal Dahle, M.; Tolo, E.; Papanikolaou, A.; Jürgenhake, C.; Svendsen, T.; Bjelland, M.; Kanellopoulou, A.; Xing-Kaeding, Y.; et al. TrAM—Transport: Advanced and Modular. In Proceedings of the TRA2020 Conference on “Rethinking Transport: Towards Clean and Inclusive Mobility”, Helsinki, Finland, 27–30 April 2020; ISBN 978-952-311-484-5. [Google Scholar]
- Industry Service for Electric Mobility. Available online: https://www.electrive.com/2020/07/15/the-fjords-launches-second-electric-ferry/ (accessed on 15 July 2020).
- Minnehan, J.J.; Pratt, J.W. Practical Application Limits of Fuel Cells and Batteries for Zero Emission Vessels; SAND-2017-12665658940; Sandia National Lab. (SNL-NM): Albuquerque, NM, USA, 2017. [Google Scholar]
- Van Oossanen, P. Resistance Prediction of Small High-Speed Displacement Vessels: State of the Art. Int. Shipbuild. Prog. 1980, 27, 212–224. [Google Scholar] [CrossRef]
- Van Oossanen, P.; Heimann, J.; Henrichs, J.; Hockirch, K. Motor Yacht Hull Form Design for The Displacement to Semi Displacement Speed Range. In Proceedings of the 10th International Conference on Fast Sea Transportation (FAST 2009), Athens, Greece, 5–8 October 2009; pp. 629–643. [Google Scholar]
- Blount, D.L.; Mc Grath, J.A. Resistance Characteristics of Semi- Displacement Mega Yacht Hull Forms. Trans. Rina Int. J. Small Craft Tech. 2009, 151, 95. [Google Scholar] [CrossRef]
- Radojcic, D.; Zgradić, A.; Kalajdzi, M.; Simić, A. Resistance Prediction for Hard Chine Hulls in the Pre-Planing Regime. Pol. Marit. Res. 2014, 21, 9–26. [Google Scholar] [CrossRef]
- Begovic, E.; Bertorello, C.; Bove, A.; Pennino, S. Hydrodynamic Performances of Warped Hard Chine Displacement Hull Form. Trans. RINA Int. J. Small Craft Tech. 2014, 156, 149. [Google Scholar] [CrossRef]
- Begovic, E.; Bertorello, C. Low Drag Hull Form for Medium Large Yachts. In Proceedings of the International Conference on Design and Construction of Super & Mega Yachts, Genoa, Italy, 10–11 May 2017; pp. 81–89. [Google Scholar]
- Begovic, E.; Bertorello, C.; Cakici, F.; Kahramanoglu, E.; Rinauro, B. Vertical Motions Prediction in Irregular Waves Using a Time Domain Approach for Hard Chine Displacement Hull. J. Mar. Sci. Eng. 2020, 8, 337. [Google Scholar] [CrossRef]
- De Luca, F.; Mancini, S.; Miranda, S.; Pensa, C. An Extended Verification and Validation Study of CFD Simulations for Planing Hulls. J. Ship Res. 2016, 60, 101–118. [Google Scholar] [CrossRef]
- ITTC. Practical Guidelines for Ship CFD Applications and the Best Practice Guidelines for the Application of Computational Fluid Dynamics in Marine Hydrodynamics; ITTC Association, Universitätsstrasse 100, CH-8006; ITTC: Zürich, Switzerland, 2014. [Google Scholar]
- De Luca, F.; Pensa, C. Experimental Investigation on Conventional and Unconventional Interceptors. Trans. Int. J. Small Craft Tech. 2012, 154, 65–72. [Google Scholar]
- Oceanvolt AXC—Modular Shaft Drive Motor Systems. Available online: https://oceanvolt.com/solutions/systems/axc-modular-shaft-drives/ (accessed on 16 December 2021).
- Cleantron, Cleantech Batteries. Available online: https://www.cleantron.nl/basic-module/ (accessed on 16 December 2021).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Builder | Type | Power (kW) | LOA (m) | Beam (m) | Displacement (t) | Pax |
|---|---|---|---|---|---|---|
| Frauscher | 610 San Remo | 4.3–10 | 6.10 | 1.80 | 0.750 | 5 |
| 650 Alassio | 4.3–60 | 6.50 | 2.17 | 0.950 | 6 | |
| 680 Lido | 10–60 | 6.80 | 2.25 | 1.400 | 8 | |
| 740 Mirage | 60 | 7.47 | 2.50 | 1.900 | 6 | |
| 740 Mirage Air | 60 | 7.47 | 2.50 | 1.900 | 8 | |
| 750 St. Tropez | 10–60 | 7.52 | 2.25 | 1.600 | 7 | |
| Ernesto Riva | Ernesto | 80 | 7.65 | 2.32 | 2.400 | 8 |
| Canadian Electric Boat | Bruce 22 | 100 | 6.70 | 2.08 | 1.088 | 5–8 |
| Fantail 217 | 100 | 6.60 | 2.03 | 0.775 | 8–10 | |
| Quietude 156 | 2 | 4.70 | 1.50 | 0.363 | 4 | |
| Ruban Bleu | Sensas | 1.6 | 4.50 | 2.02 | 0.485 | 6 |
| Scoop | 1.6 | 4.75 | 1.95 | 0.520 | 7 | |
| Most | 2.2 | 5.90 | 2.20 | 0.900 | 11 | |
| Aquawatt | 848 Twin Carbon | 50–80 | 8.48 | 2.54 | 1.700 | 10 |
| 717 Classic Sport | 25 | 7.17 | 2.25 | 1.400 | 7 | |
| 550 Elliniko | 22 | 5.50 | 2.00 | 0.750 | 6 | |
| Boote Marian | Laguna 760 | 10–100 | 7.6 | 2.3 | 1.200 | |
| Capriole 700 | various | 7 | 2.5 | 1.500 | ||
| Delta 600 | 3.5–8 | 6 | 2.15 | 1.100 | 6 | |
| Stickl | E-volution 660 | 4.3–15 | 6.6 | 2.1 | 0.950 | 7 |
| E-motion 600 | 4.3–16 | 6 | 1.8 | 0.750 | 5 | |
| GoElectric | Rand picnic 18 | 12–25 | 5.35 | 2.10 | 0.600 | 10 |
| Rand Mana 23 | 15 | 7.00 | 2.30 | 0.900 | 10 | |
| Candela C-8 | 50 | 8.50 | 2.50 | 1.605 | 8 | |
| Strana 23 | 15 | 7.00 | 2.25 | 1.100 | 6 | |
| Rand Spirit 25 | 145–230 | 7.5 | 2.55 | 1.800 | 9 |
| Builder | Type | Power (kW) | LOA (m) | Beam (m) | Displacement (t) | Pax |
|---|---|---|---|---|---|---|
| Alternative Energies | Passeur La Rochelle | 32 | 10.2 | 3.5 | 8.7 | 35 |
| Bus de mer | 44 | 15.2 | 5 | 12 | 75 | |
| SMC Composite | SB 330 | 40 | 10.2 | 5.3 | 6 | 24 |
| Ernesto Riva | Electra | 80 | 10.2 | 3.2 | 3.7 | 12 |
| Metaltec | ECOCAT | 100 | 18 | 30 | 22 | 120 |
| Grove boat | AquabusC60 | 32 | 14 | 7 | 11 | 60–75 |
| Ruban Blue | Navette | 10 | 8.5 | 3.5 | 6.5 | 30 |
| Vizianello | Scossa | 180 | 15 | 2.2 | 12 | 39 |
| Manufacturer | Type | Power (kW) | RPM | Weight (kg) | Voltage (V) | Freq. (Hz) | P/W kW/kg | Torque (N/m) |
|---|---|---|---|---|---|---|---|---|
| 40 | 40 | 2600 | 66.5 | 144 | 173 | 0.60 | 148 | |
| Piktronik | 50 | 50 | 3000 | 75 | 143 | 200 | 0.67 | 159.2 |
| 100 | 100 | 3000 | 94 | 249 | 200 | 1.06 | ||
| 125 | 125 | 3600 | 94 | 290 | 240 | 1.33 | ||
| Torqueedo | Deep Blue | 100 | 2500 | 195 | 355 | 0.51 | 437 | |
| De Blue25i | 25 | 1400 | 85 | 360 | 0.29 | 343 | ||
| Oceanvolt | AXC30 | 30 | 1400 | 130 | 48 | 0.23 | ||
| Transfluid | EM | 15 | 3000 | 45 | 68 | 0.33 | 48 | |
| EM | 50 | 3000 | 135 | 178 | 0.37 | 159 | ||
| EM | 75 | 3000 | 185 | 169 | 0.41 | 239 |
| Displacement Full Load (kg) | Displacement Lightship (kg) | LOA (m) | LWL (m) | BWL (m) | BMAX (m) | Draft (m) | L/B | L/V1/3 | CB |
|---|---|---|---|---|---|---|---|---|---|
| 3600 | 2500 | 9.225 | 7.355 | 2.700 | 2.940 | 0.450 | 2.82 | 4.89 | 0.393 |
| Condition | Speed (kn) | Resistance (N) | Effective Power (kW) | Dynamic Trim (Degree) | CG Rise (m) |
|---|---|---|---|---|---|
| 10 | 4130 | 21.2 | 4.4 | −0.04 | |
| Bare Hull | 13 | 5180 | 34.6 | 5.8 | 0.04 |
| 16 | 5930 | 48.8 | 7.1 | 0.14 | |
| 10 | 3440 | 17.7 | 1.8 | 0.04 | |
| With a 20 mm | 13 | 4600 | 30.8 | 2.22 | 0.06 |
| Interceptor | 16 | 5230 | 43.0 | 2.66 | 0.44 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Begovic, E.; Bertorello, C.; De Luca, F.; Rinauro, B. KISS (Keep It Sustainable and Smart): A Research and Development Program for a Zero-Emission Small Crafts. J. Mar. Sci. Eng. 2022, 10, 16. https://doi.org/10.3390/jmse10010016
Begovic E, Bertorello C, De Luca F, Rinauro B. KISS (Keep It Sustainable and Smart): A Research and Development Program for a Zero-Emission Small Crafts. Journal of Marine Science and Engineering. 2022; 10(1):16. https://doi.org/10.3390/jmse10010016
Chicago/Turabian StyleBegovic, Ermina, Carlo Bertorello, Fabio De Luca, and Barbara Rinauro. 2022. "KISS (Keep It Sustainable and Smart): A Research and Development Program for a Zero-Emission Small Crafts" Journal of Marine Science and Engineering 10, no. 1: 16. https://doi.org/10.3390/jmse10010016
APA StyleBegovic, E., Bertorello, C., De Luca, F., & Rinauro, B. (2022). KISS (Keep It Sustainable and Smart): A Research and Development Program for a Zero-Emission Small Crafts. Journal of Marine Science and Engineering, 10(1), 16. https://doi.org/10.3390/jmse10010016