
Three-Dimensional Simulations of Scour around Pipelines of Finite Lengths

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Computer Model
2.1. Flow Equations
2.2. Sediment Transport and Bed Deformation Equations
2.3. Adaptive Meshing and Sand-Slide Models
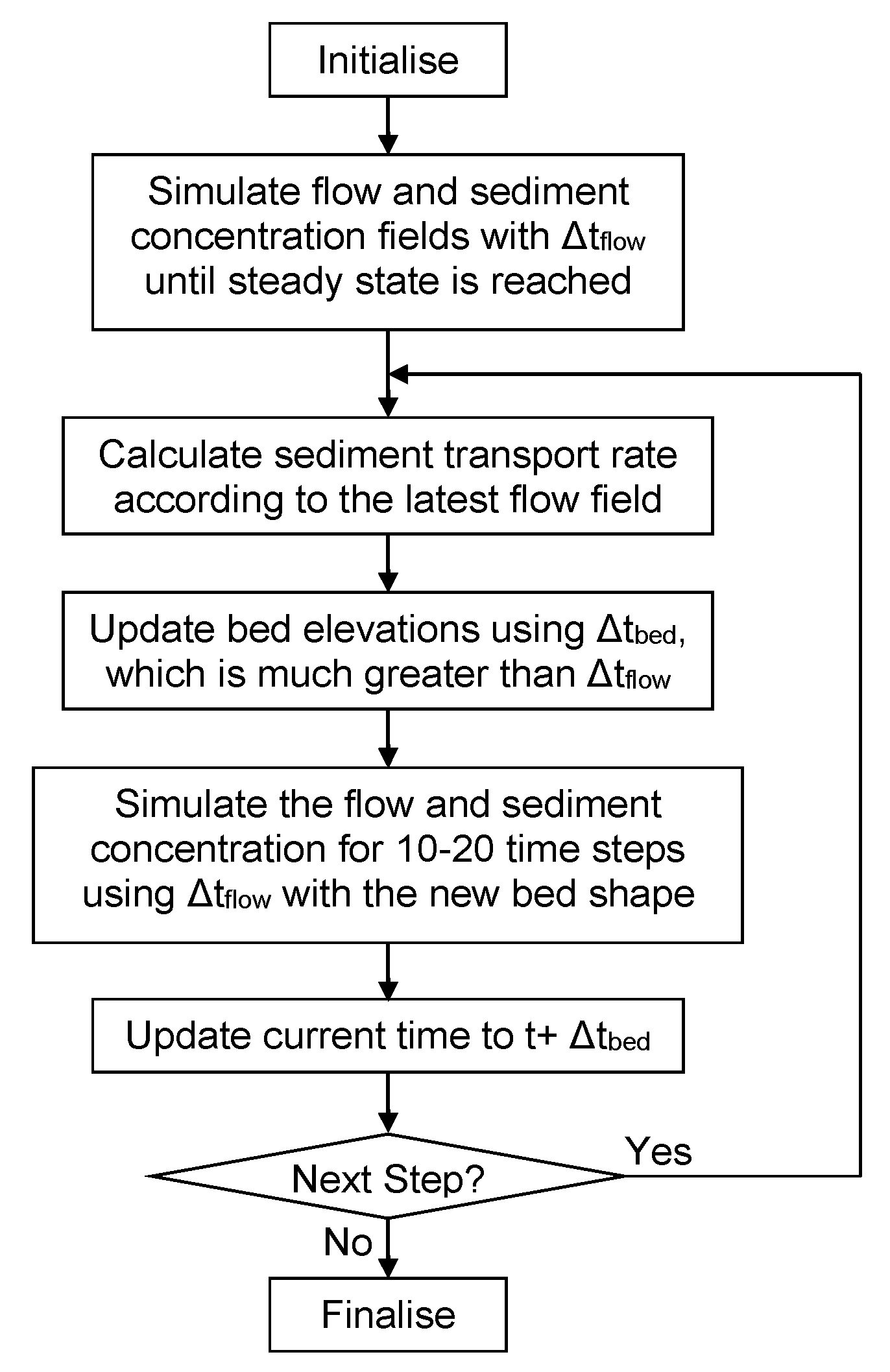
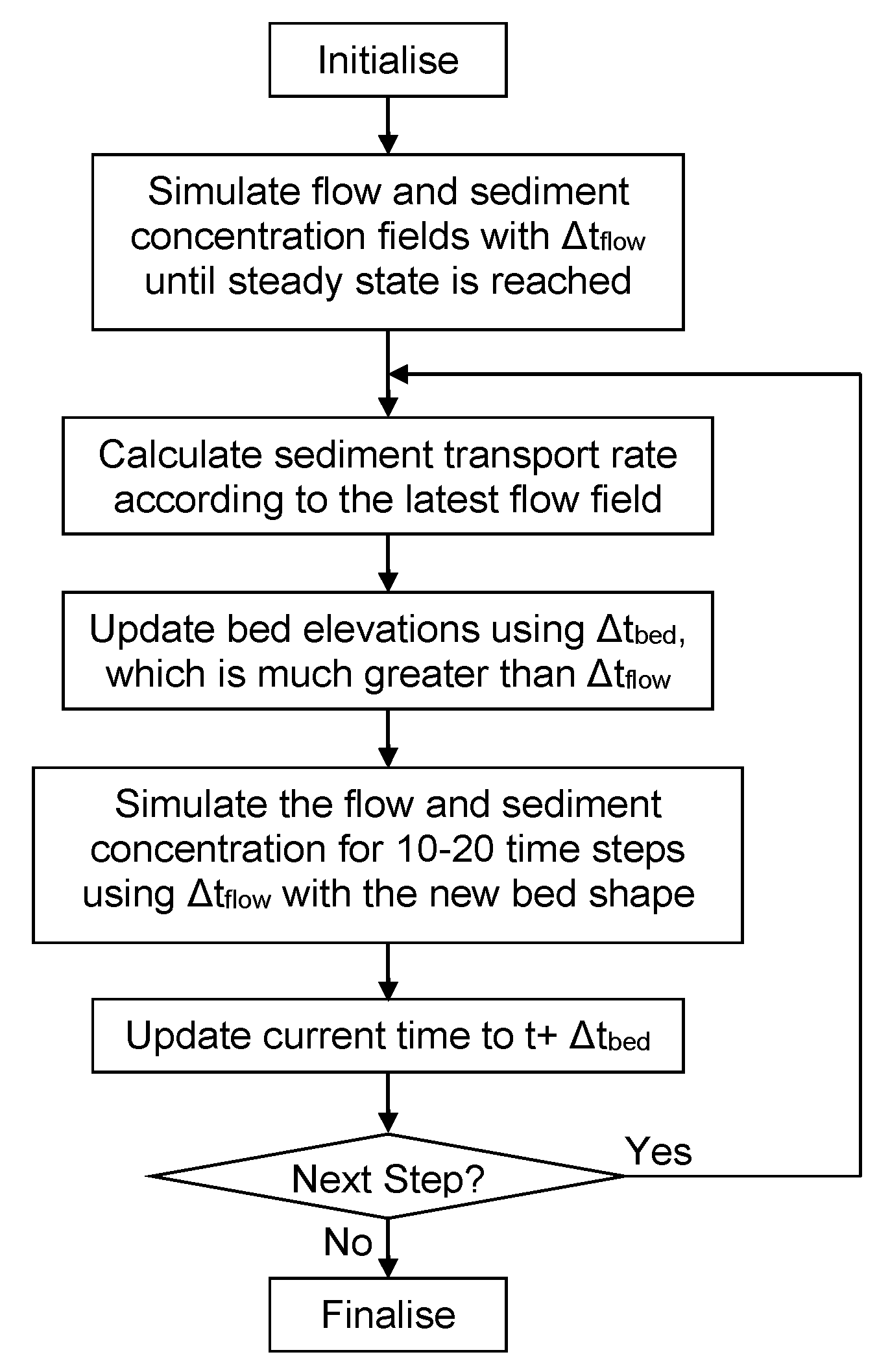
2.4. Numerical Method and Computational Procedure
3. Model Verifications
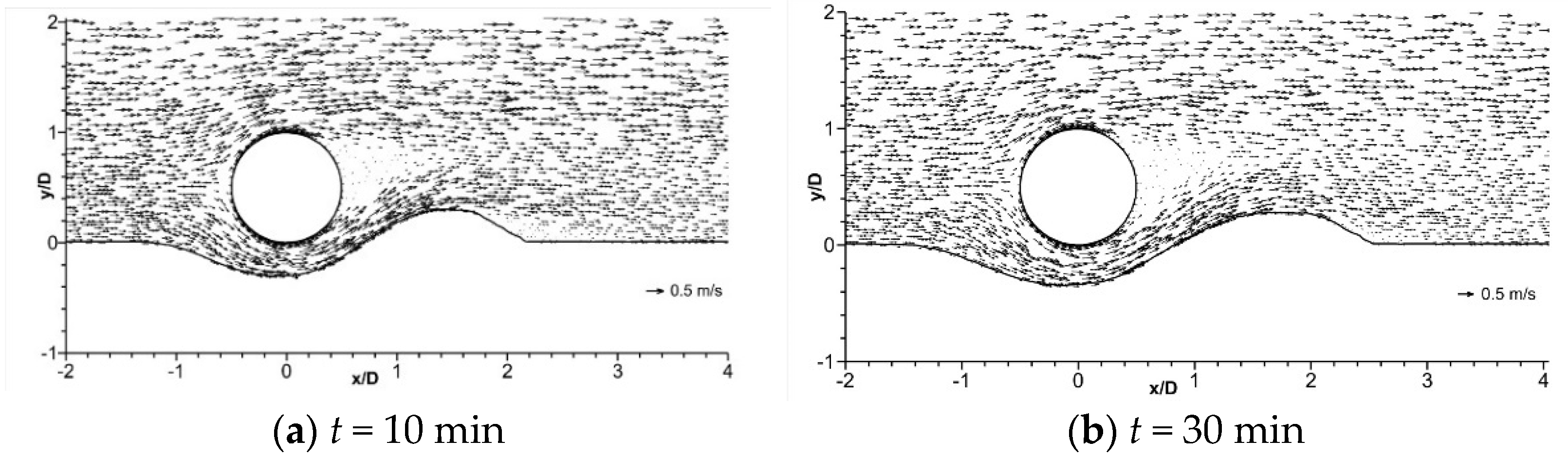
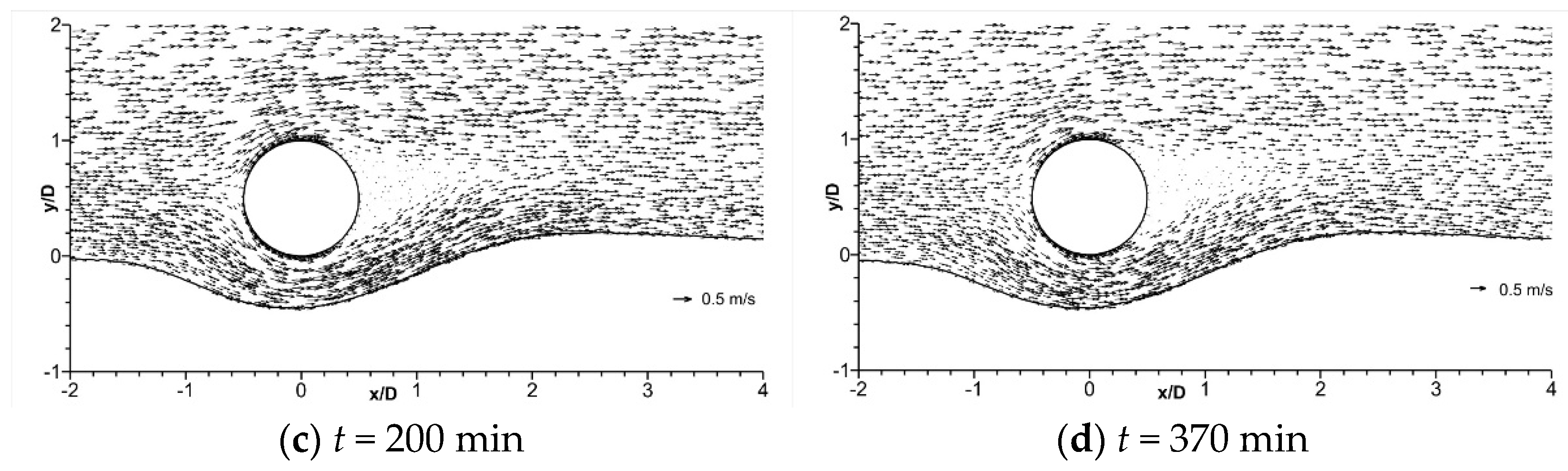
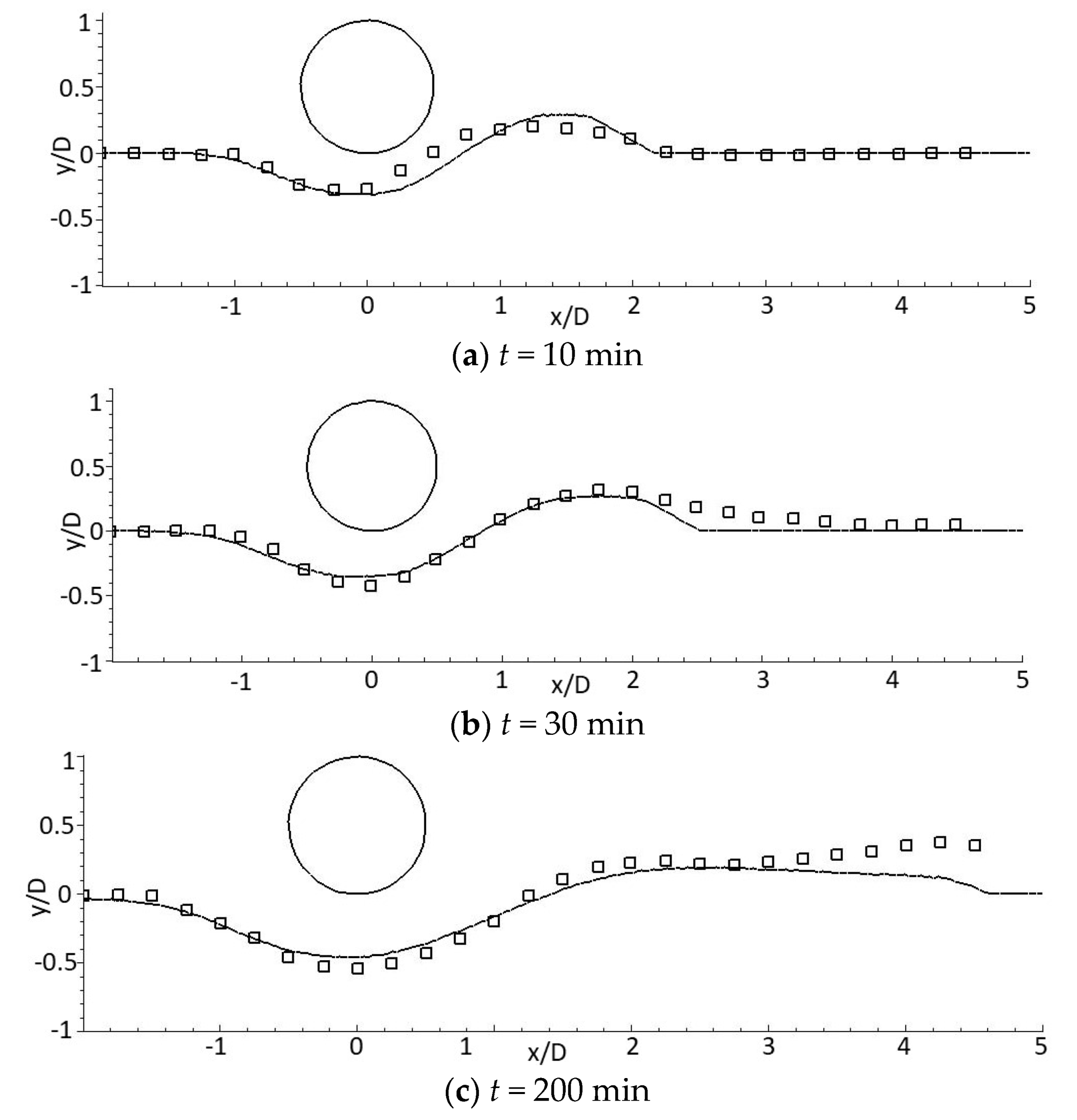
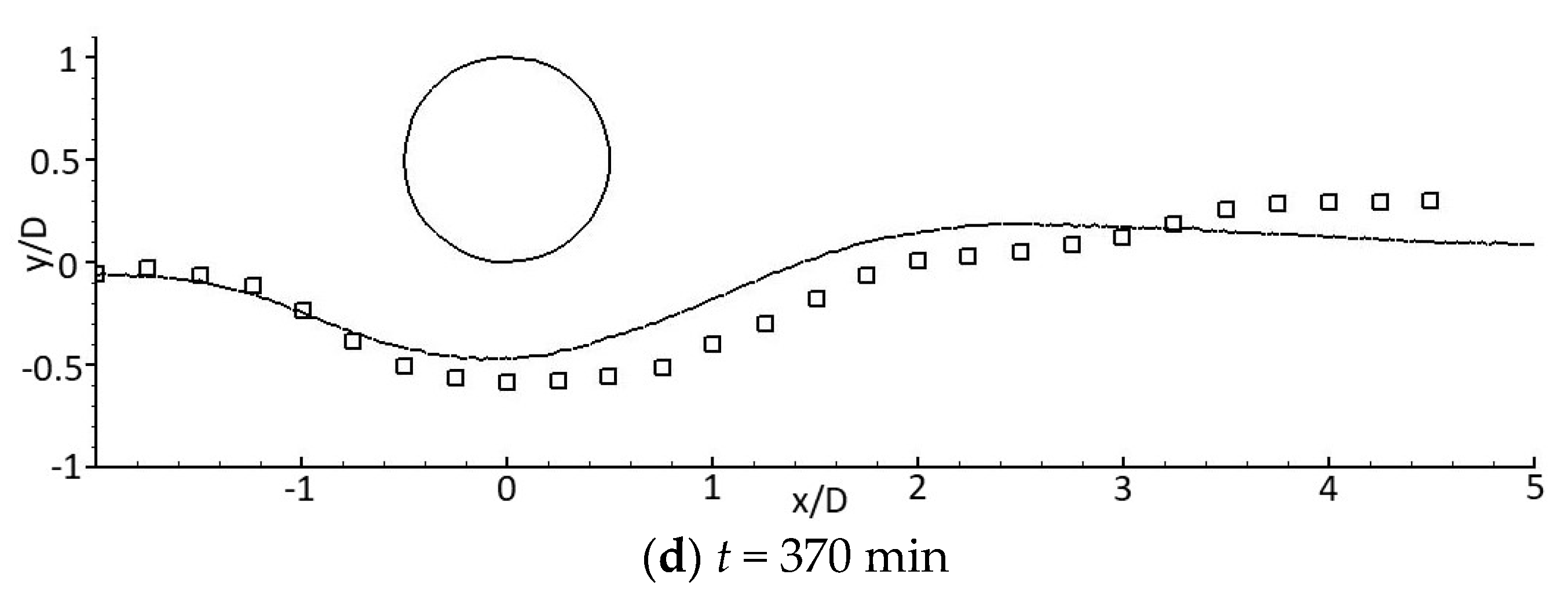
3.1. Vertical Two-Dimensional Scour around an Infinitely Long Pipe
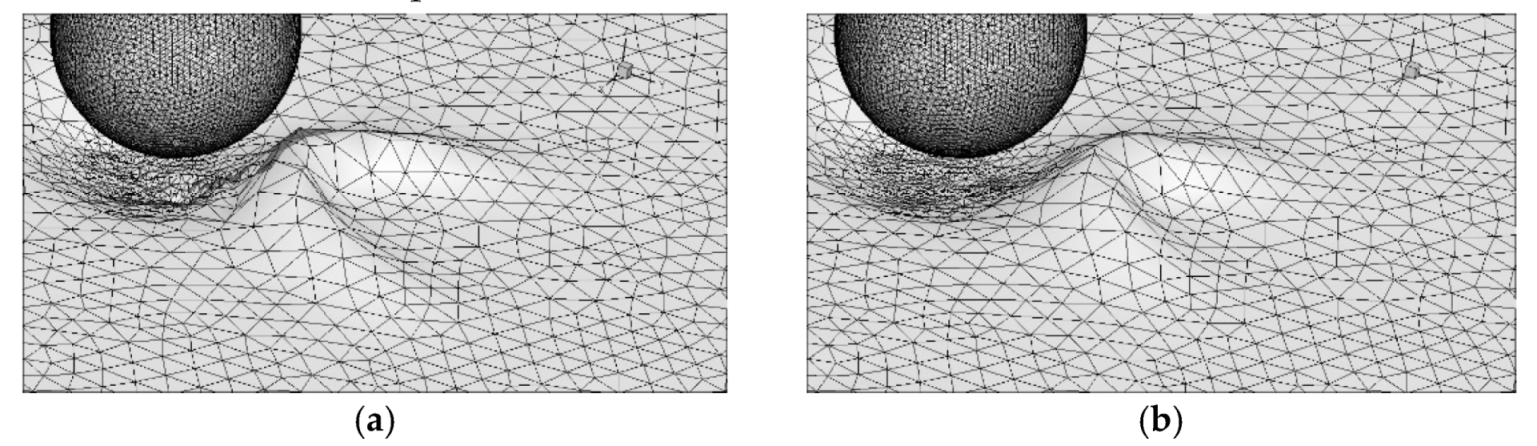
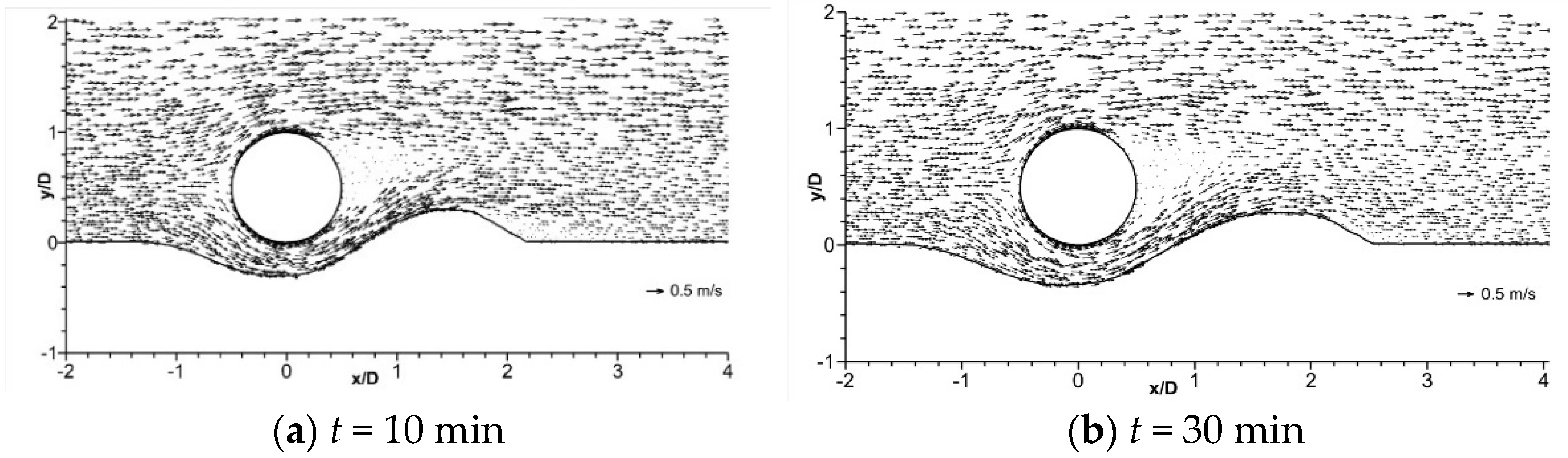
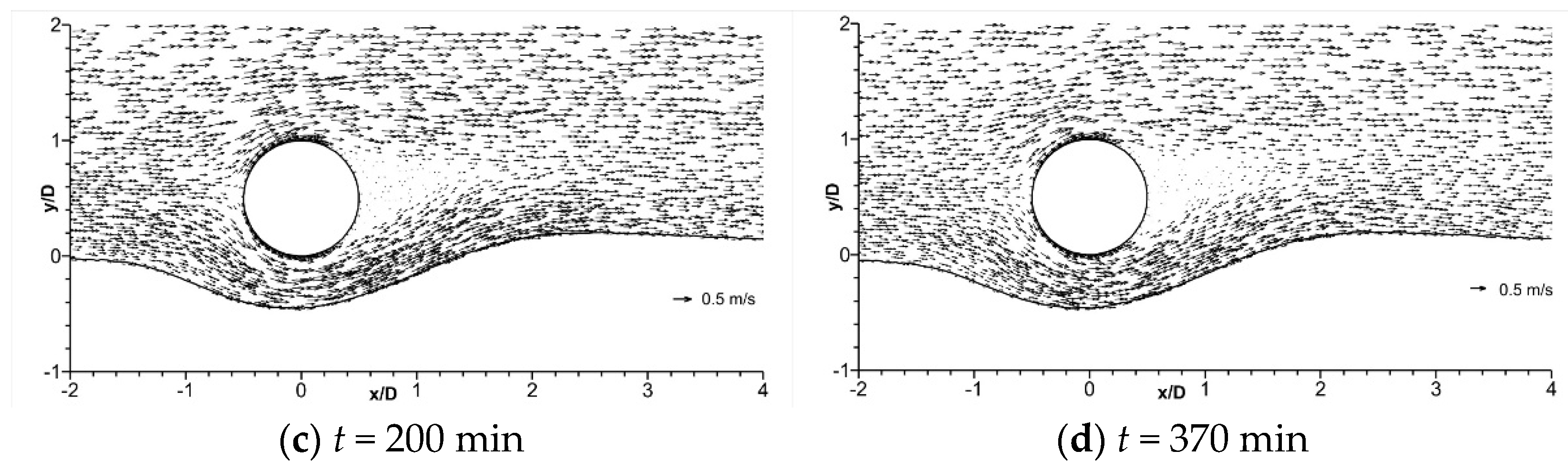
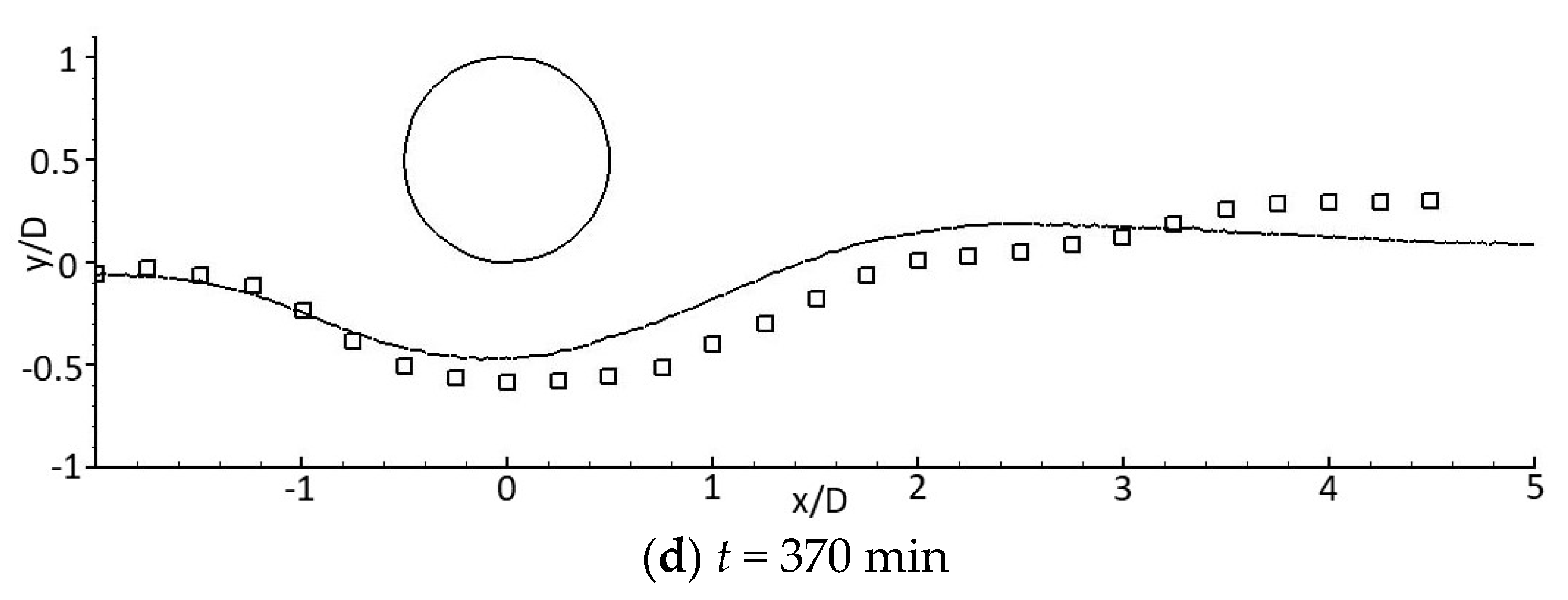
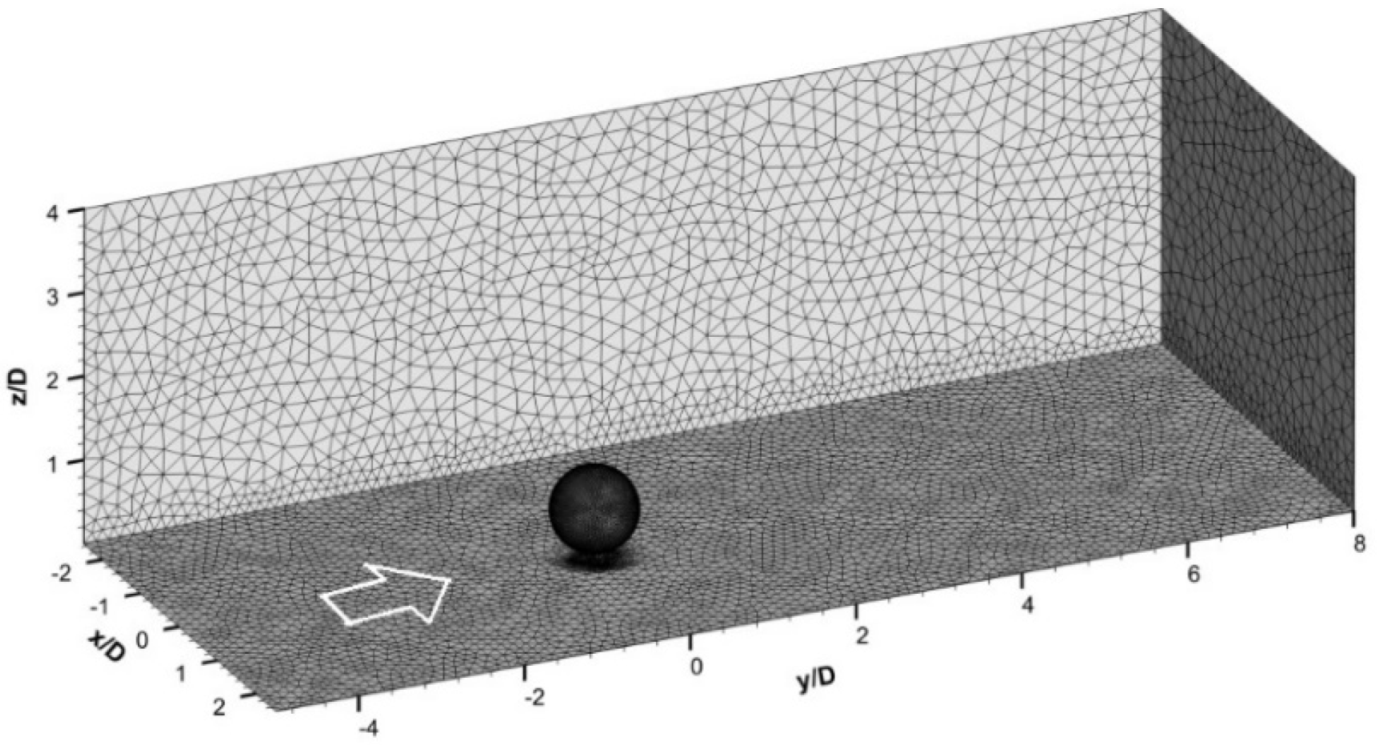
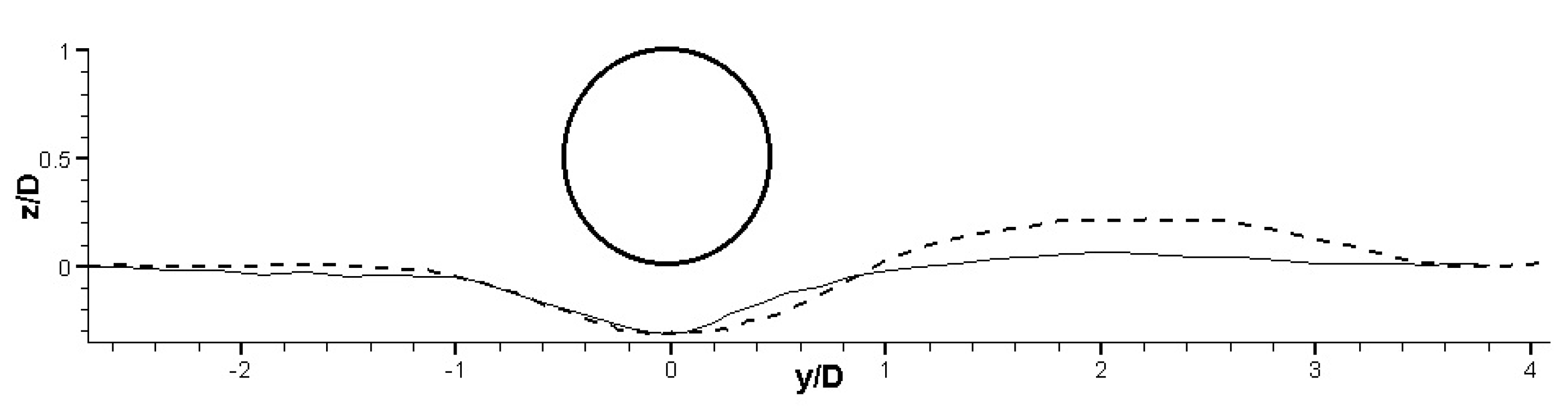
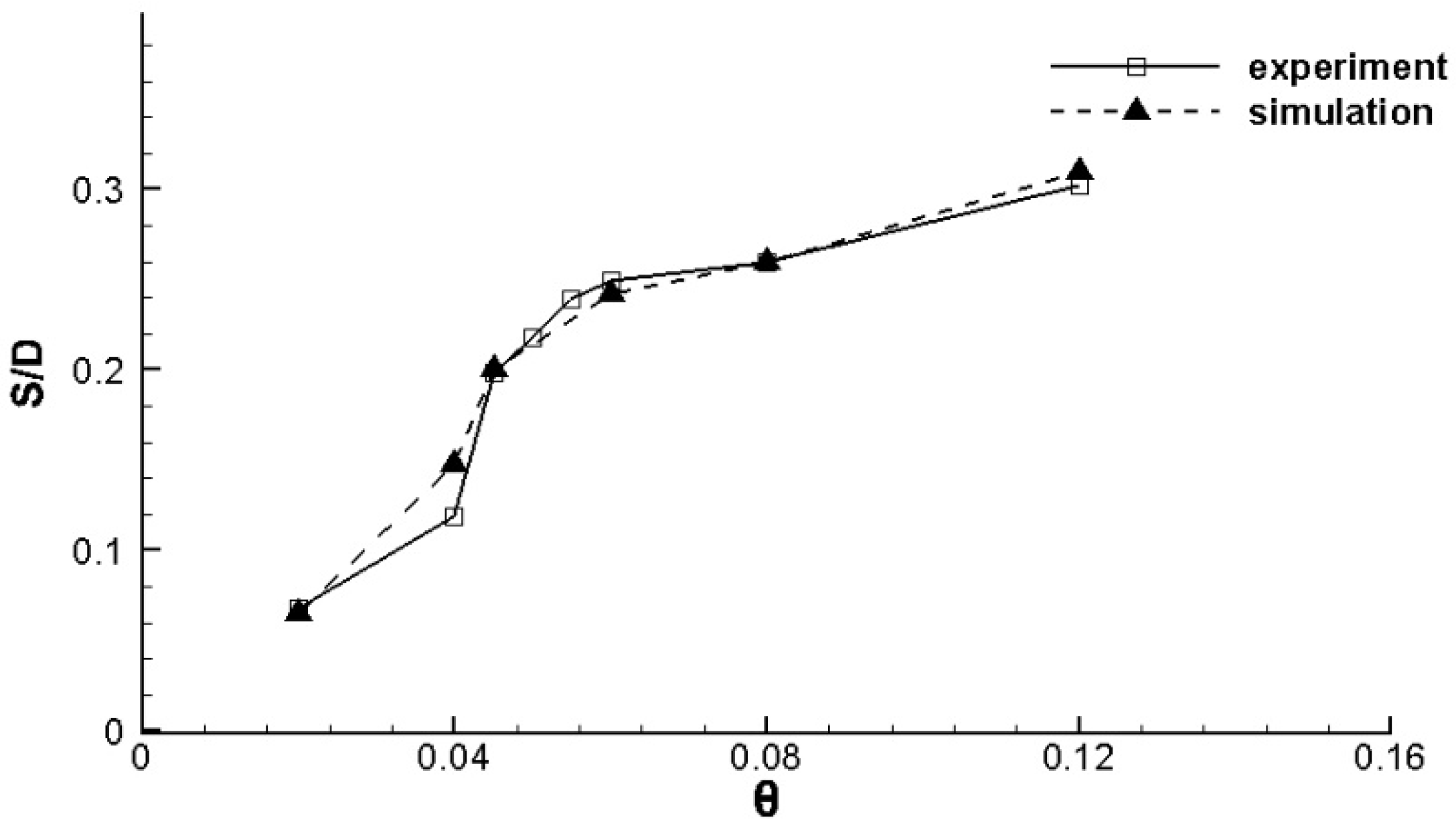
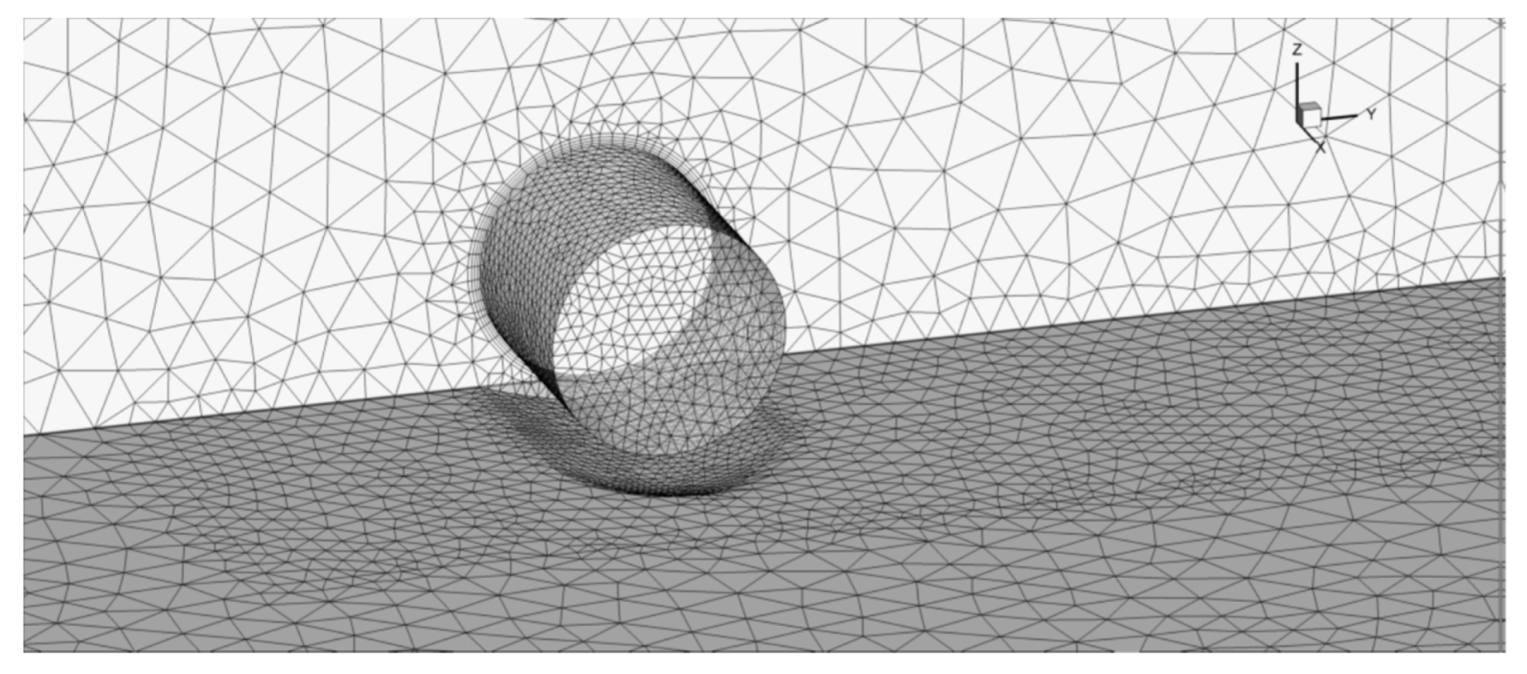
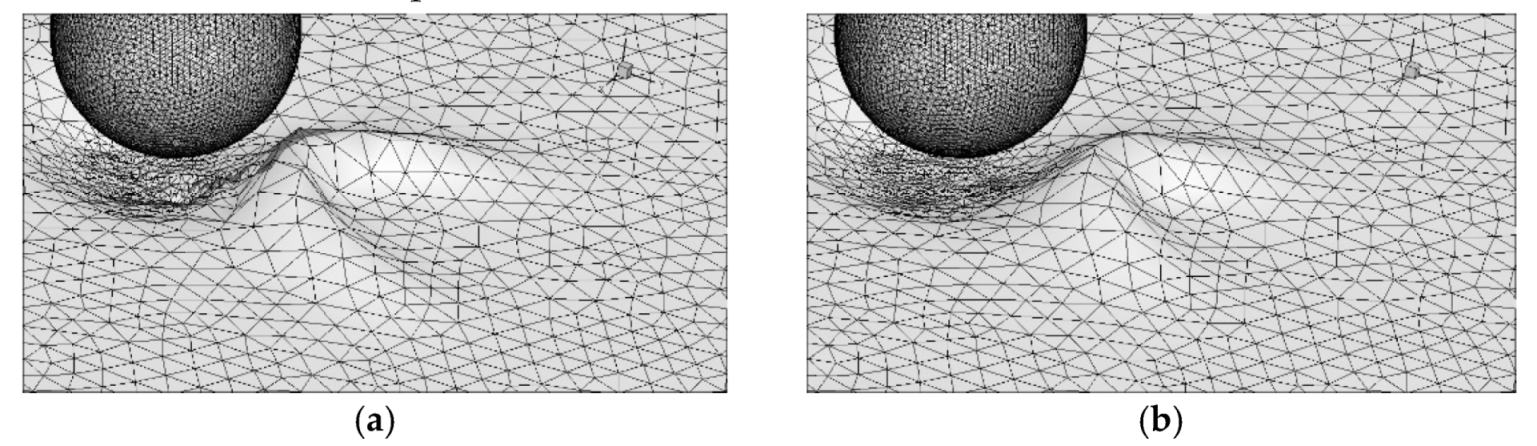
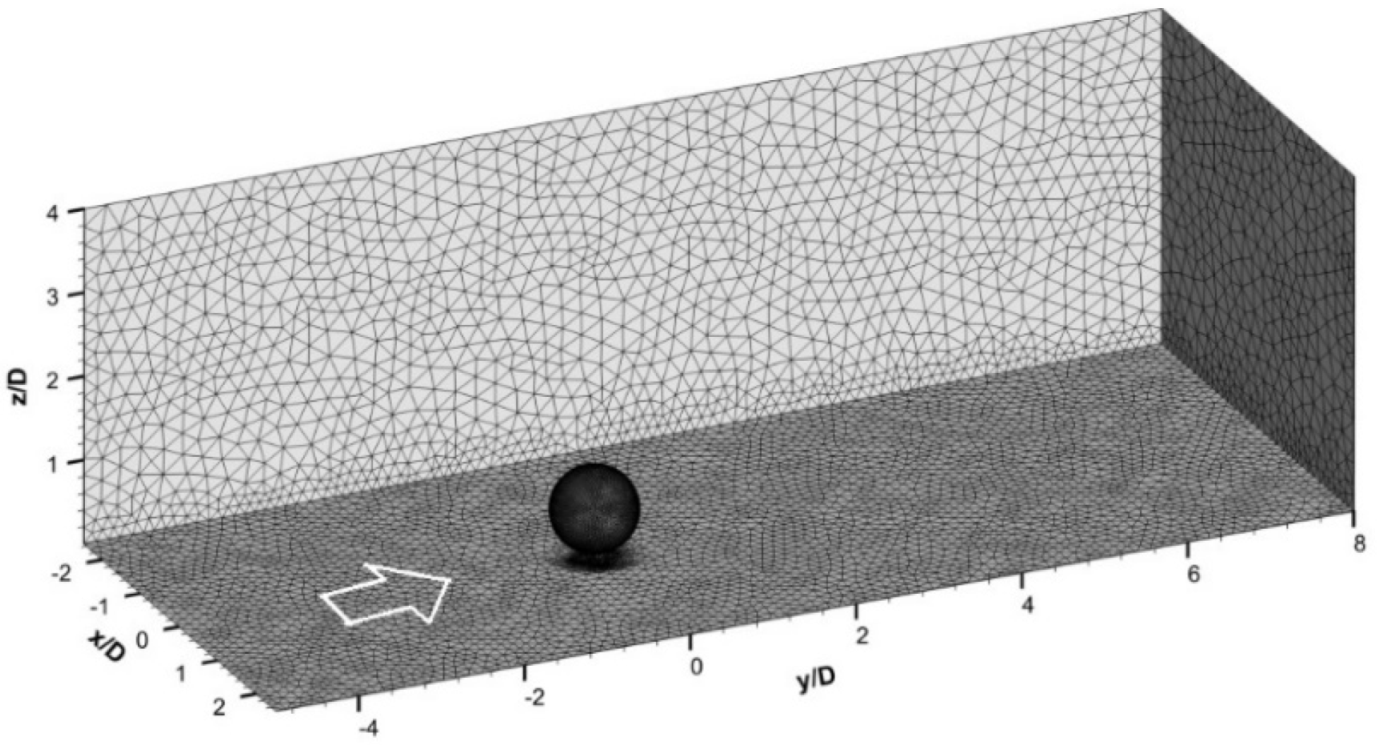
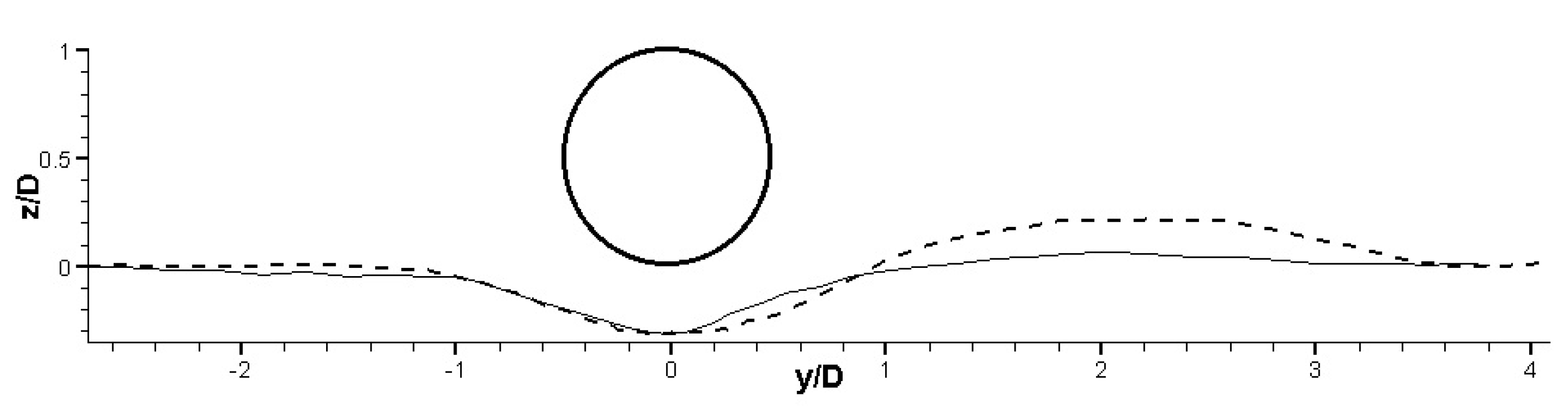
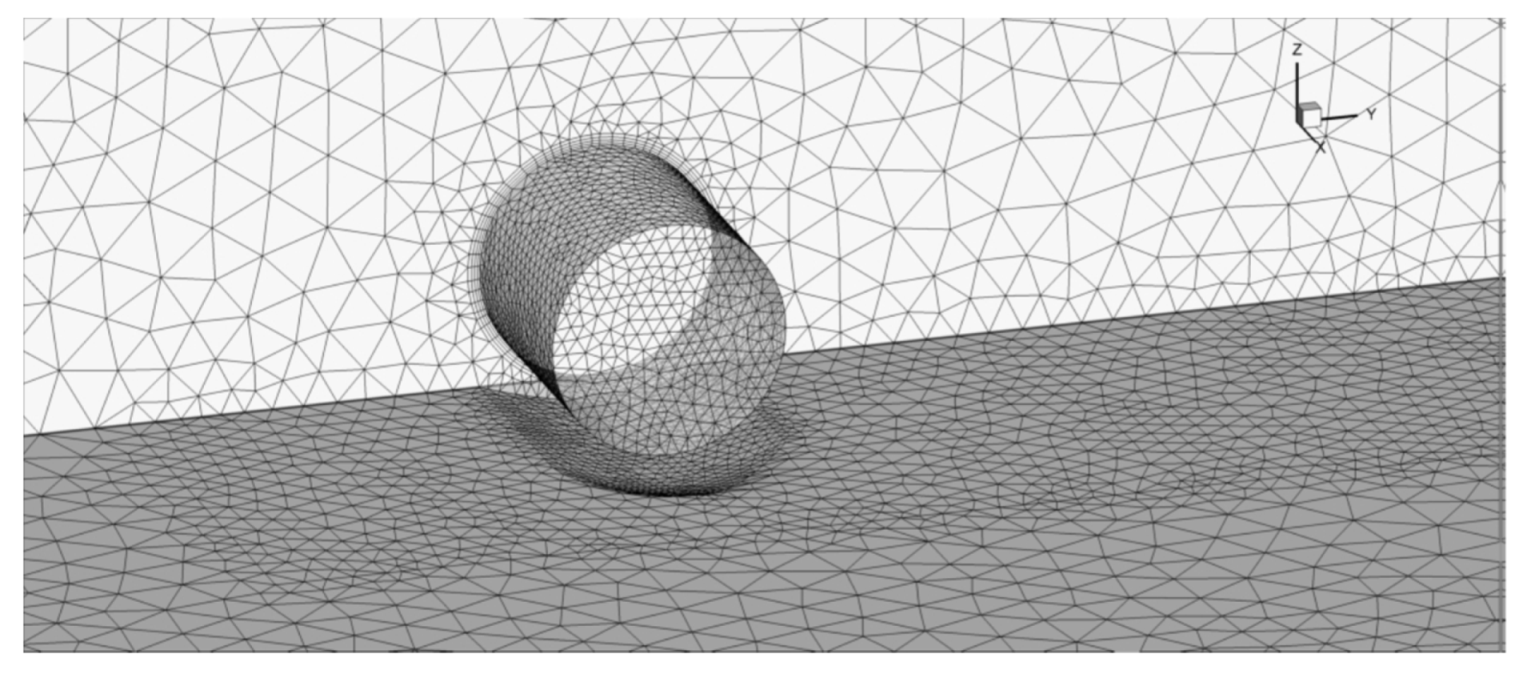
3.2. Three-Dimensional Scour around a Sphere
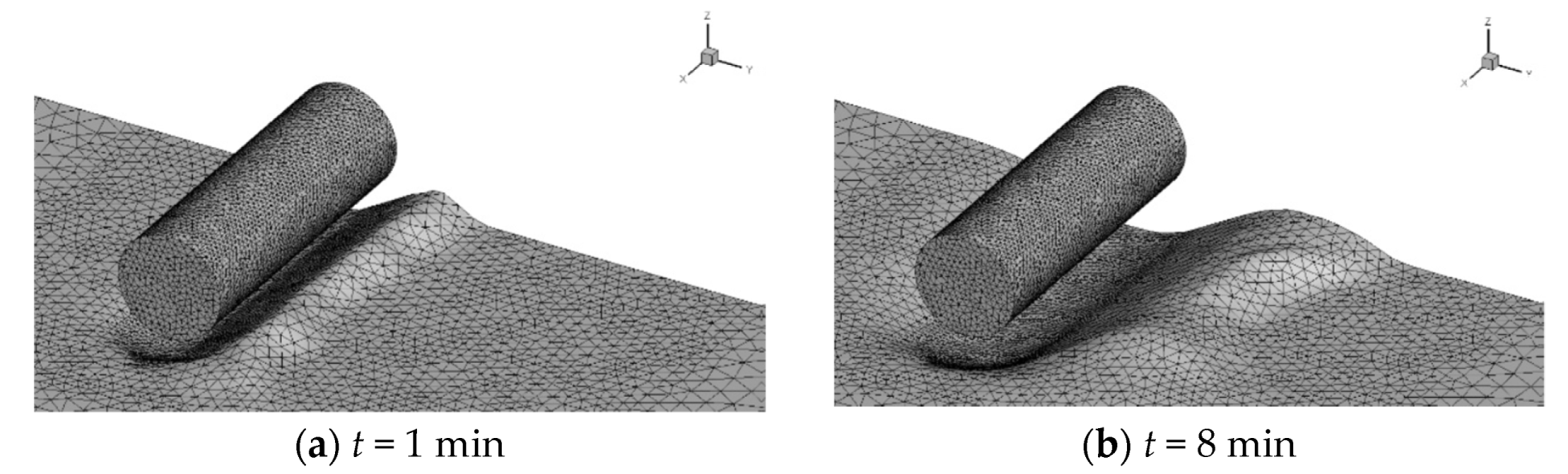
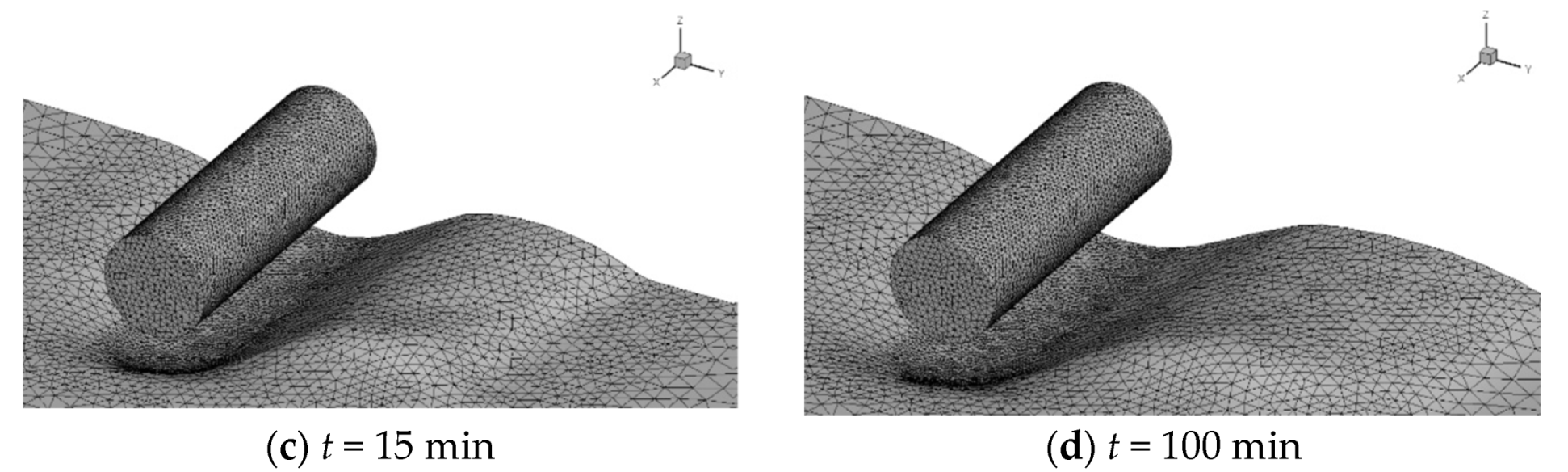
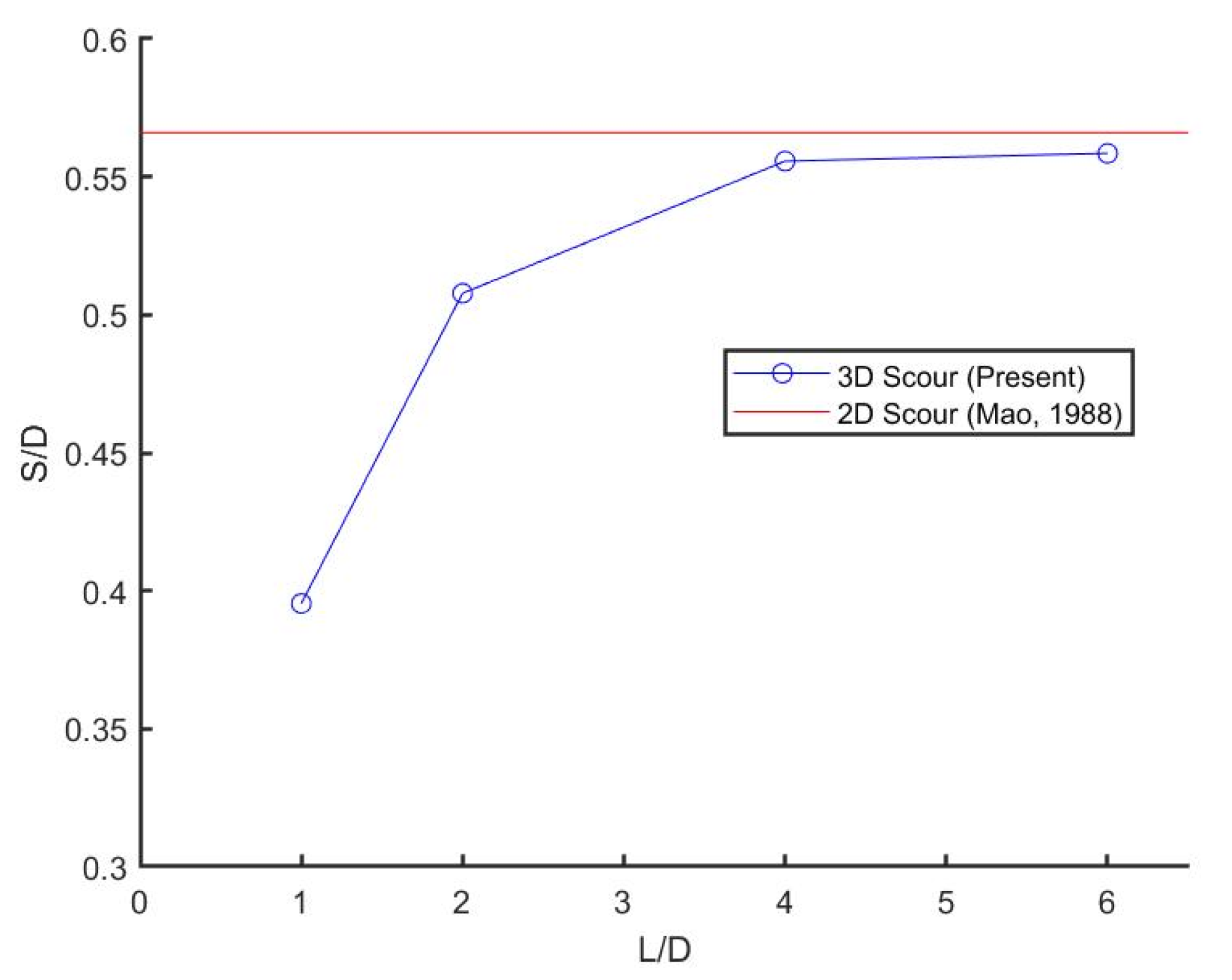
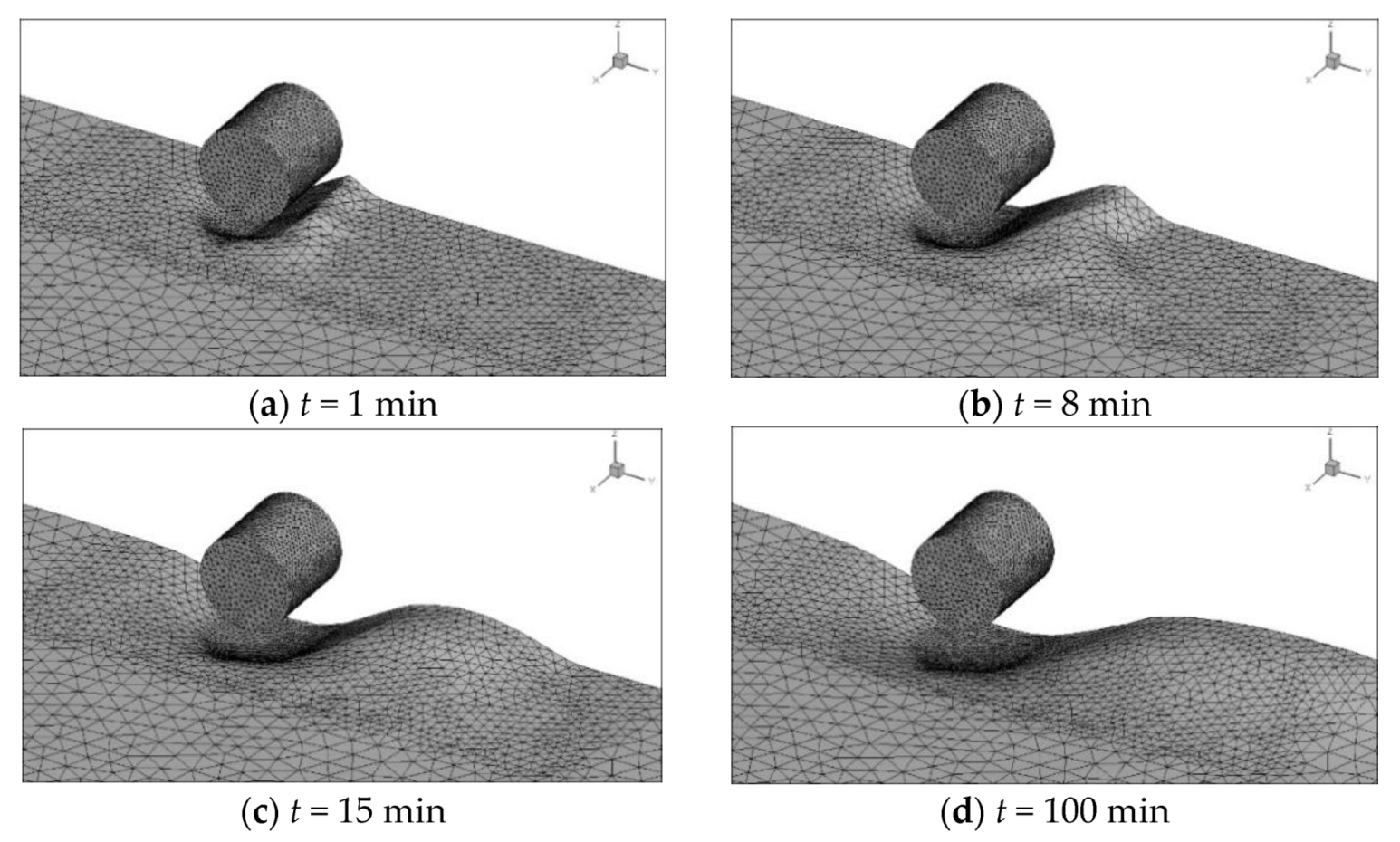
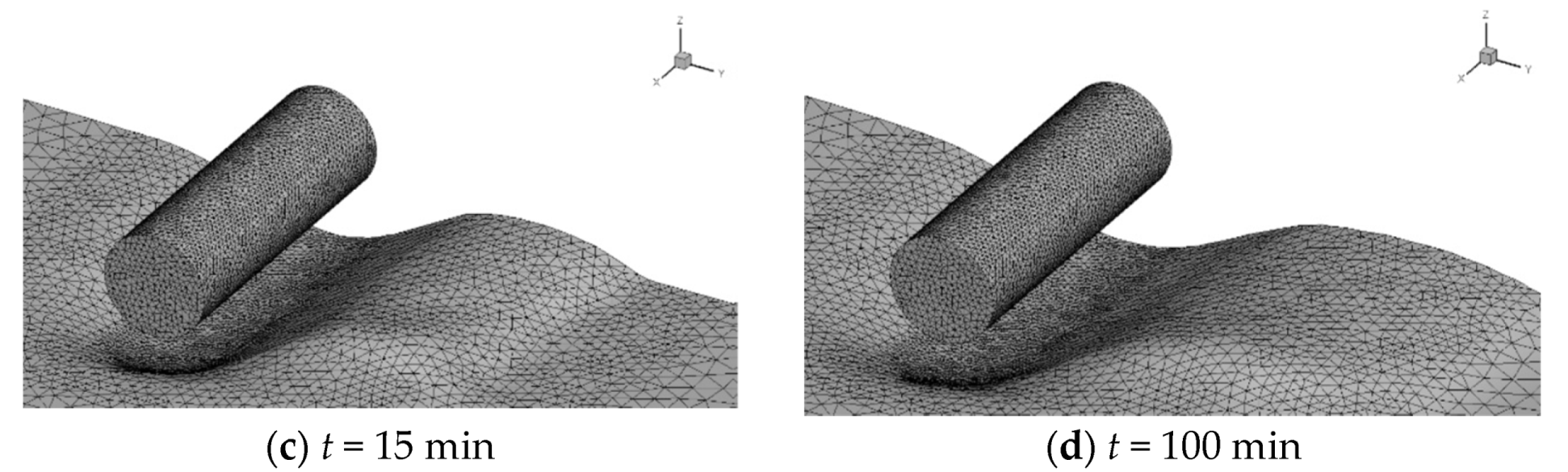
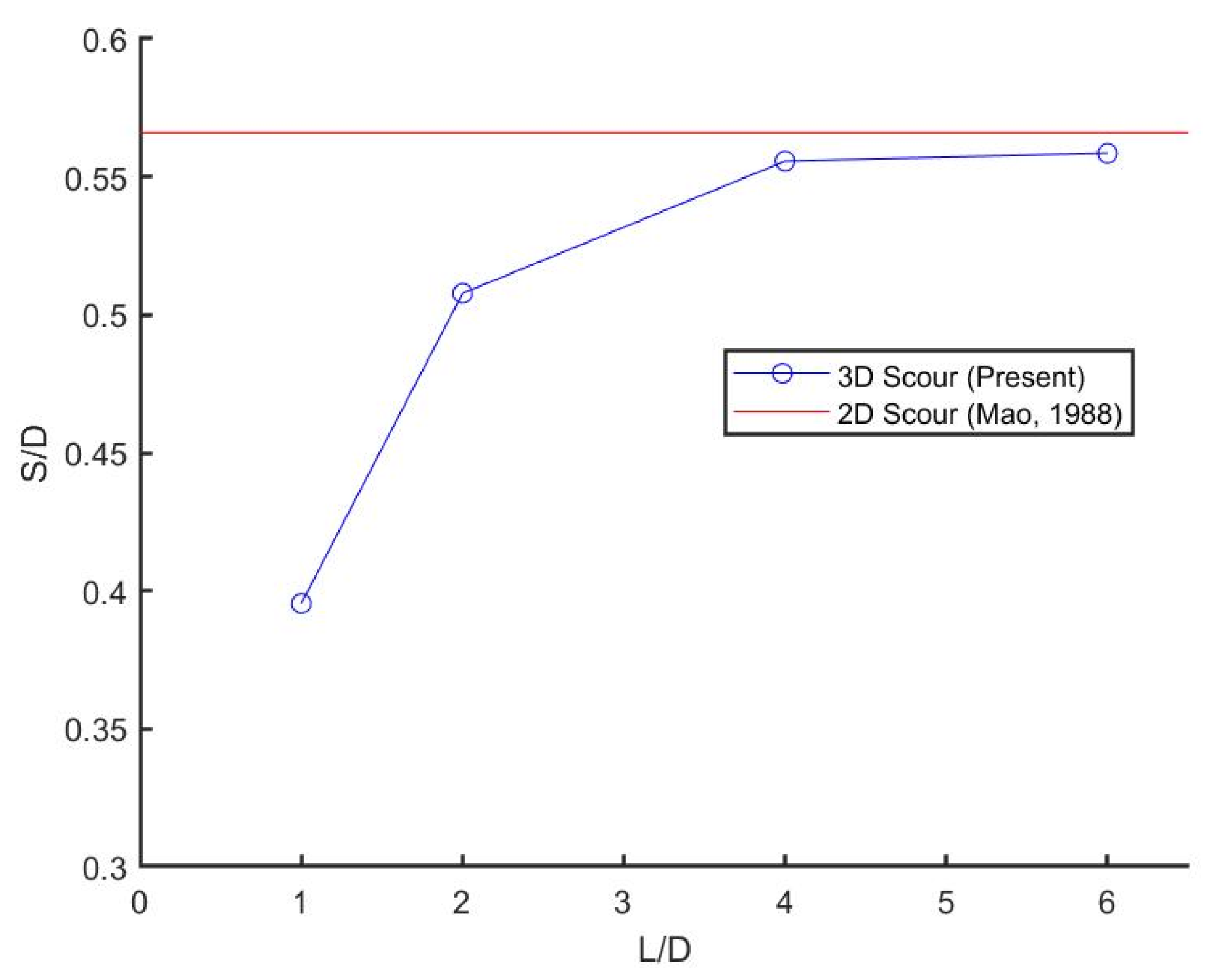
4. Scour around Pipes of Finite Lengths
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Herbich, J.B. Scour around pipelines, piles, and seawalls. In Handbook of Coastal and Ocean Engineering; Gulf Publishing Company: Houston, TX, USA, 1984. [Google Scholar]
- Mao, Y. The Interaction between a Pipeline and an Erodible Bed; Technical University of Denmark: Lyngby, Denmark, 1987. [Google Scholar]
- Truelsen, C.; Sumer, B.M.; Fredsoe, J. Scour Around Spherical Bodies and Self-Burial. J. Waterw. Port Coast. Ocean. Eng. 2005, 131, 1–13. [Google Scholar] [CrossRef]
- Gao, F.P.; Yang, B.; Wu, Y.X.; Yan, S.M. Steady current induced seabed scour around a vibrating pipeline. Appl. Ocean Res. 2006, 28, 291–298. [Google Scholar] [CrossRef] [Green Version]
- Sumer, B.M.; Jensen, H.R.; Mao, Y.; Fredsoe, J. Effect of lee-wake on scour below pipelines in current. J. Waterw. Port Coast. Ocean Eng. 1988, 114, 599–614. [Google Scholar] [CrossRef]
- Li, F.; Cheng, L. A numerical model for local scour under offshore pipelines. J. Hydraul. Eng. 1999, 125, 400–406. [Google Scholar] [CrossRef]
- Chiew, Y.M. Mechanics of local scour around submarine pipelines. J. Hydraul. Eng. 1990, 116, 515–529. [Google Scholar] [CrossRef]
- Brørs, B. Numerical Modeling of Flow and Scour at Pipelines. J. Hydraul. Eng. 1999, 125, 511–523. [Google Scholar] [CrossRef]
- Shamloo, H.; Rajaratnam, N.; Katopodis, C. Hydraulics of simple habitat structures. J. Hydraul. Res. 2001, 39, 351–366. [Google Scholar] [CrossRef]
- Sumer, B.M.; Fredsøe, J. The Mechanics of Scour in the Marine Environment; World Scientific: Singapore, 2002. [Google Scholar]
- Liang, D.; Cheng, L.; Li, F. Numerical modeling of scour below a pipeline in currents. Part II: Scour simulation. Coast. Eng. 2005, 52, 43–62. [Google Scholar] [CrossRef]
- Liang, D.; Cheng, L. A numerical model for wave-induced scour below a submarine pipeline. J. Waterw. Port Coast. Ocean Eng. 2005, 131, 193–202. [Google Scholar] [CrossRef]
- Liang, D.; Li, T.; Xiao, Y. Simulation of scour around a vibrating pipe in steady currents. J. Hydraul. Eng. 2015, 11, 04015049. [Google Scholar] [CrossRef]
- Yang, B.; Gao, F.; Wu, Y. Numerical Study of the Occurrence of Pipeline Spanning under the Influence of Steady Current. Ship Build. China 2005, 46, 221–226. [Google Scholar]
- Yang, B.; Gao, F.; Wu, Y. Experimental Study on vortex-induced Vibrations of a Pipeline near a Plane Boundary in Steady Flow. China Offshore Oil Gas 2008, 18, 52–57. [Google Scholar]
- Hatton, K.A.; Foster, D.L.; Traykovski, P.A.; Smith, H.D. Numerical Simulations of the Flow and Sediment Transport Regimes Surrounding a Short Cylinder. IEEE J. Ocean. Eng. 2007, 32, 249–259. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Shi, B.; Fan, F.F.; Ruan, X.J. Two-dimensional numerical simulation of local scour of horizontal cylinder near sand bed. Chin. J. Comput. Mech. 2012, 15, 759–764. [Google Scholar]
- Van Rijn, L.C.V. Sediment Transport, Part I: Bed Load Transport. J. Hydraul. Eng. 1984, 110, 1431–1456. [Google Scholar] [CrossRef] [Green Version]
- Allen, J.R.L. Simple models for the shape and symmetry of tidal sand waves: (1) Statically stable equilibrium forms. Mar. Geol. 1982, 48, 31–49. [Google Scholar] [CrossRef]
- Soulsby, R.; Whitehouse, R. Threshold of sediment motion in coastal environments. Proc. Pac. Coasts Ports 1997, 12, 149–154. [Google Scholar]
- Jensen, J.H.; Fredsøe, J. Oblique Flow over Dredged Channels. II: Sediment Transport and Morphology. J. Hydraul. Eng. 1999, 125, 1190–1198. [Google Scholar] [CrossRef]
- Roulund, A. Three-Dimensional Numerical Modeling of Flow around a Bottom-Mounted Pile and Its Application to Scour; Technical University of Denmark: Lyngby, Denmark, 2000. [Google Scholar]
- Van Doormaal, J.P.; Raithby, G.D. Enhancements of the simple method for predicting incompressible fluid flows. Numer. Heat Transf. 1984, 7, 147–163. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, D.; Huang, J.; Zhang, J.; Shi, S.; Zhu, N.; Chen, J. Three-Dimensional Simulations of Scour around Pipelines of Finite Lengths. J. Mar. Sci. Eng. 2022, 10, 106. https://doi.org/10.3390/jmse10010106
Liang D, Huang J, Zhang J, Shi S, Zhu N, Chen J. Three-Dimensional Simulations of Scour around Pipelines of Finite Lengths. Journal of Marine Science and Engineering. 2022; 10(1):106. https://doi.org/10.3390/jmse10010106
Chicago/Turabian StyleLiang, Dongfang, Jie Huang, Jingxin Zhang, Shujing Shi, Nichenggong Zhu, and Jun Chen. 2022. "Three-Dimensional Simulations of Scour around Pipelines of Finite Lengths" Journal of Marine Science and Engineering 10, no. 1: 106. https://doi.org/10.3390/jmse10010106
APA StyleLiang, D., Huang, J., Zhang, J., Shi, S., Zhu, N., & Chen, J. (2022). Three-Dimensional Simulations of Scour around Pipelines of Finite Lengths. Journal of Marine Science and Engineering, 10(1), 106. https://doi.org/10.3390/jmse10010106