1. Introduction
Agricultural systems using Precision Farming (PF) technologies have already been introduced in the market. The range varies from entry level guidance to data acquisition systems integrated into the farm management software. Most of these systems gather tractor-implement information, or perform tailor made applications [
1]. The more intensive the crop production system is, the more advanced the technology adaptation on farms is [
2]. This serves the goal of higher yields and better crop quality, with the support of sensor systems. The increasing number of available sensors, along with the high diversity of sensor technologies, e.g., imaging sensors, multi- and hyperspectral optical sensors, fluorometers, etc., has increased the possibility for integrating these sensor systems into the daily farm operation. Each sensor has advantages and disadvantages, and can provide important information concerning the field status [
2,
3,
4]. Yet each sensor type has limitations to overcome. By merging the data of different sensors and sensor types, their limitations can be reduced, since data can be complementary or more informative [
5]. In that sense, data fusion approaches are necessary, achieving better results by merging numerous sensor data deriving from the field and comparing them with ground truth data like yield or biomass.
Hall and Llinas [
6] defined data fusion as “the integration of information from multiple sources to produce specific and comprehensive unified data about an entity”. Brooks and Iyengar [
5] classified four categories for sensor data fusion: (1) redundant; (2) complementary; (3) coordinated; or (4) independent fusion. Dasarathy [
7] defined three levels: (I) raw data fusion; (II) feature fusion with feature extraction; and (III) decision fusion, which includes inter alia weighted decision methods [
8]. Many different terms are used in literature to describe and discuss “fusion” concerning data. Dasarathy [
9] also decided to use “information fusion” instead, as the overall term. In all cases, fusion of the sensor information can improve our knowledge of the field conditions [
6].
For agricultural applications many sensors have been proposed. Several research studies based on spectral data are available, e.g., using data mining techniques with a genetic algorithm for nitrogen (N) status and grain yield estimation [
10], or acquiring multispectral aerial images for the detection of wheat crop and weeds [
11]. They are often based on measurements with one single sensor. There is a lack of information, of how informative different sensors and combination of sensors are, in the variability presented at the field level. Peteinatos et al. [
12] measured stress levels in outdoor wheat pots with three optical sensors. Yet there is work to be done, connecting ground data with aerial data, even more in real field conditions. Using mobile platforms for data acquisition offers the possibility of system automation with fusion approaches. The advantage of ground platforms is their ability of carrying higher loads and more equipment than it would be possible with Unmanned Aerial Vehicles (UAV) [
13].
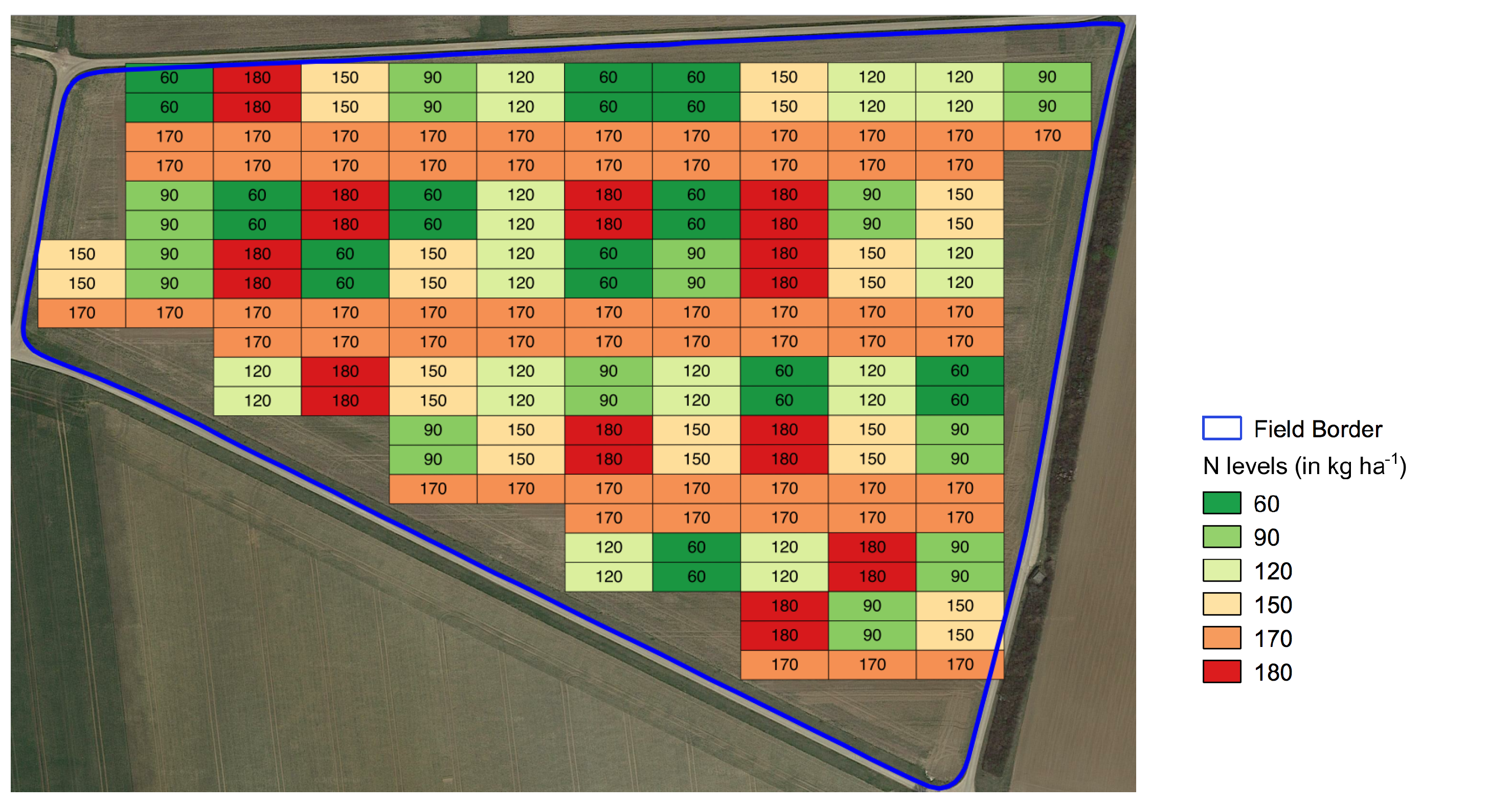
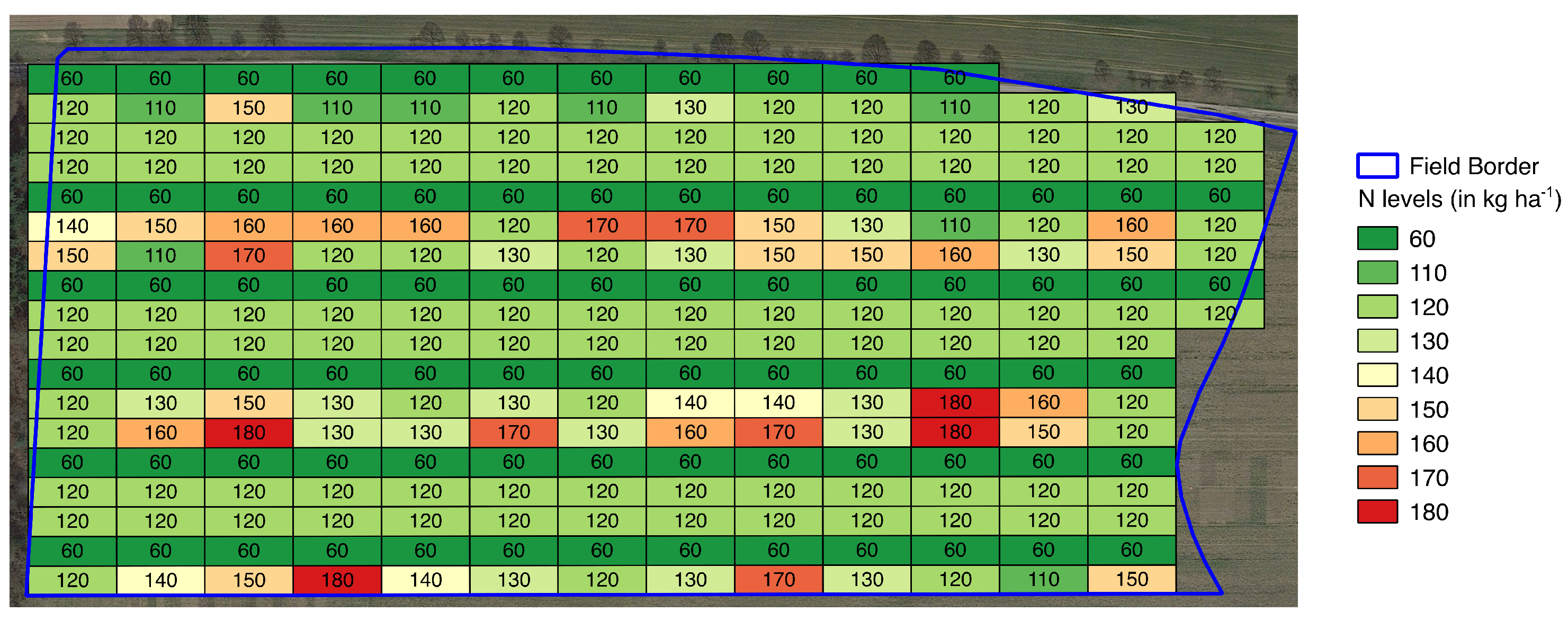
In the current paper, the investigated research fields were planted with winter wheat utilising different N levels. These fields were examined with a fluorescence sensor and spectrometers, one spectrometer installed on an UAV, the other two spectrometers and the fluorescence sensor on a ground platform. The aim of this research was to test research sensors on field trails close to normal, practical farming conditions. This publication will discuss redundant and complementary fusion approaches, on a raw data and feature fusion level. It investigates the questions; (i) how the used research sensors perform in a large field; (ii) which of the calculated features are statistically significant for assessments of wheat yield, biomass and the available N for the plant; and (iii) how information fusion can support farming decisions.
4. Discussion
This study describes the performance of the used optical sensors, and their ability of wheat yield, biomass and N
assessment. Based on the yield amounts, the crop development had a steady growth for all site-years, despite of an irregular high yield amount of site-year 1 at the field plots with an N level of 60 kg·ha
. The reason for this irregularity may be caused by the previous season in 2010. There, corn was planted which can have positive effects on the organic humus content of the field, e.g., Singh Brar et al. [
30]. For site-years 1 and 4, the yield at N levels between 150 an 180 kg N·ha
had no increasing effect on the grain quantity or quality [
4]. A lower N level can be recommended for the fertiliser management of these fields for the cultivation of wheat. The total average yield of site-year 3 was 26.7% higher than on site-year 2, which is an indication of more BM in the field, that is able to produce more grain.
The UAV MMS1 spectrometer has similar technical properties like the HS spectrometer, however, the results of both sensors are on a different prediction level for the IDV’s in the presented research design. The analysis with the chosen DV’s yield and N
for the MMS1 spectrometer data did not show any correlations. For site-year 2, there are low correlations for BM Weight and LAI; they were not repeatable for site-year 3 (
Table 5). Reasons for the low or non existent correlations, based on the findings of Link et al. [
17], are (1) a limited path accuracy with the consequence of outlaying data points not fitting to the research field design; (2) height inaccuracy of the UAV; (3) a short flight time of 15 min which required several flight missions to cover the entire research field; (4) that data post processing relies on accurate data from the autopilot system for pitch and roll correction of each data point, and on the control measurement of the MMS1 sensor at the start of the UAV. As the sensor in this setup only could be configured for continuous measurements, a lot of the logged data were of no use as they included the necessary flight turns and the surface measurements on the flight to the research field, Changing light conditions during the following flight mission affected the measurement precision in each design plot; and (5) the sensor footprint of 50.27 m
with an overlapping factor of 0.33 [
17], covering a larger area at each measurement than the ground sensors were able to acquire (
Table 3). As a consequence, the MMS1 data had a higher averaged value than the ground sensor data, which results in a lower resolution and a lower detection accuracy. However, this may be sufficient depending on other investigation purposes, ensuring a stable flight altitude and an integrated fusion approach on a raw data or feature fusion level. Other aerial platform approaches, like an electric multicopter, may lead to better results due to its better flight stability and easier point to point navigation behaviour. Geipel et al. [
31] took the same MMS1 spectrometer like in the presented manuscript and mounted it to a hexacopter. With the same ground-truth information via sampling the above-ground BM they were able to measure higher correlations with BM and grain yield, taking into account a data acquisition system for all involved sensors [
32].
The MP fluorometer was able to detect significant correlations with grain yield (Adj.
r of 0.48–0.63), notably in the ratios SFR with green and red excitation as well as in FERARI. They are linked to the chlorophyll content of the crop [
33,
34]. The correlations with the available N are high and reach Adj.
r values of 0.63–0.67 at a later growing stage (Z 59 and Z 66) with the RF signal and the SFR ratio. The highest correlations are with BM related properties. The correlations with the BM weight range from an Adj.
r of 0.46 at the early growing stage (Z 31), up to an Adj.
r of 0.86 at ripening (Z 85) and senescence (Z 91) stages. Fluorescence sensors for agricultural usage on tractors or other mobile platforms are barely in use. Their required contact with the crop canopy is one of the reasons why most of the used agricultural sensors are based on spectral characteristics [
35]. However, due to the active LED emission source of the MP sensor, it provides a profound, reliable and repeatable technology especially for measurements on the field with changing illumination. Hyperspectral line scanners do not require close contact with the crop canopy and use sun induced fluorescence, however their field application is still in discussion and used on a research level [
36].
Spectral sensors are already well adopted at large modern farms, and are able to fuse the measured data with previously gathered data sets via a map overlay approach [
2,
37,
38]. Also in scientific research spectral sensors have a high acceptance, as more than 90% of the spectral information on crop canopy is contained in the red and near infrared (NIR) spectral bands [
39,
40]. For the FS indices HVI, NDVI, OSAVI, REIP and CropSpec, the correlations with yield increased, starting at heading stage (Z 51) to a high level of an Adj.
r = 0.67 at ripening stage (Z 85). Especially the indices CropSpec and REIP correlate very high with N
and provide an Adj.
r up to 0.86. For the BM characteristics, REIP, SAVI and CropSpec have high Adj.
r values > 0.63 already from stem elongation stage onwards (Z 30). The
r values of the HandySpec sensor data analysis was at a lower level than the ones from the FieldSpec sensor. They conclude in a maximum correlation of an Adj.
r≤ 0.64 at a significance level <0.05, with the presented DV’s and IDV’s.
For research, the high correlations of the MP fluorometer and the FS sensor can be merged on a feature fusion level. This has been done by Zecha et al. [
4] and in the presented manuscript with a data post-processing method. The developed Model 4 from site-year 4 has been applied to the data sets of site-years 1–3. Model 4 did not correlate on a significant level with the gathered sensor data in these three site-years. However, a similar combination of indices and ratios (model
Yield) resulted in significant correlations for all four site-years, by changing only one parameter (FERARI with CropSpec). By this change, the Adj.
r was between 0.32 and 0.74 two months before harvest for all site-years. The data analysis reveals that the more mixed indices and ratios are in a model, the higher and more robust the Adj.
r values became, like RF
and HVI, combined with index CropSpec or ratio FERARI, in the investigated linear models.
This model has a potential to continue working. Three out of the four parameters are exactly the same, providing results for the other three site-years. On the other hand, the ability of the presented model, predicting wheat yield by using unknown or different data, has not yet been validated, e.g., with machine learning methods proposed by Peña et al. [
41] or as comparison with the linear models of Mortensen et al. [
42] estimating above-ground biomass and N-uptake through aerial images. Future work needs to be done to train and test the real capabilities of this model, and to prove if it works.





{kind=link}
{kind=link}