
Design and Test of an Energy-Saving Bionic-Inspired Rotary Blade: A Study on Power Consumption and Soil Surface Quality



Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
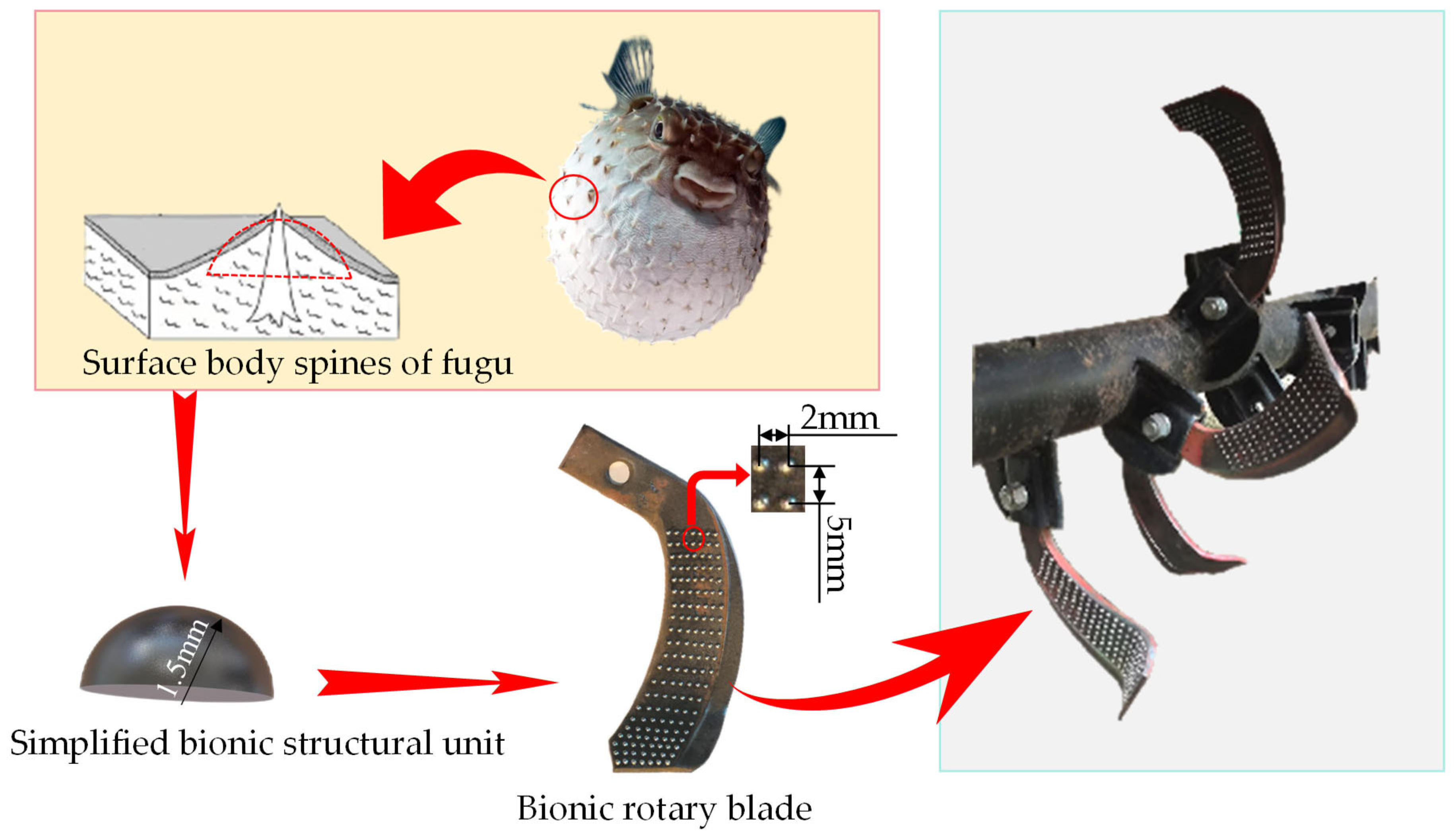
2.1.1. Design of Bionic Pufferfish Rotary Blade
2.1.2. Testing Equipment
2.2. Methods
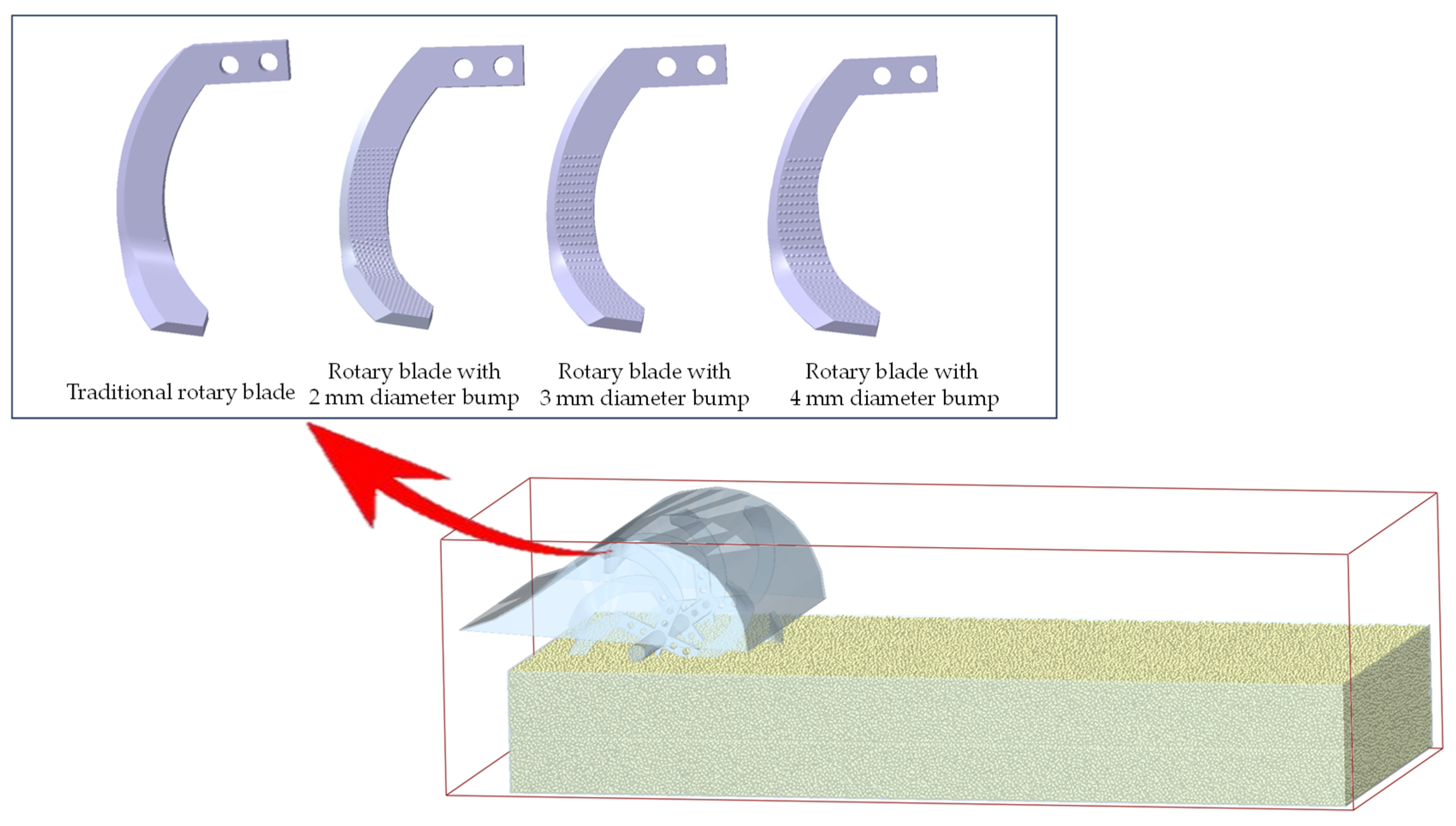
2.2.1. DEM Simulation
2.2.2. Preparation for Soil Bin Test
2.2.3. Test Design
- (1)
- Test factors
- (2)
- Evaluation indexes
2.3. Data Analysis
3. Results and Discussion
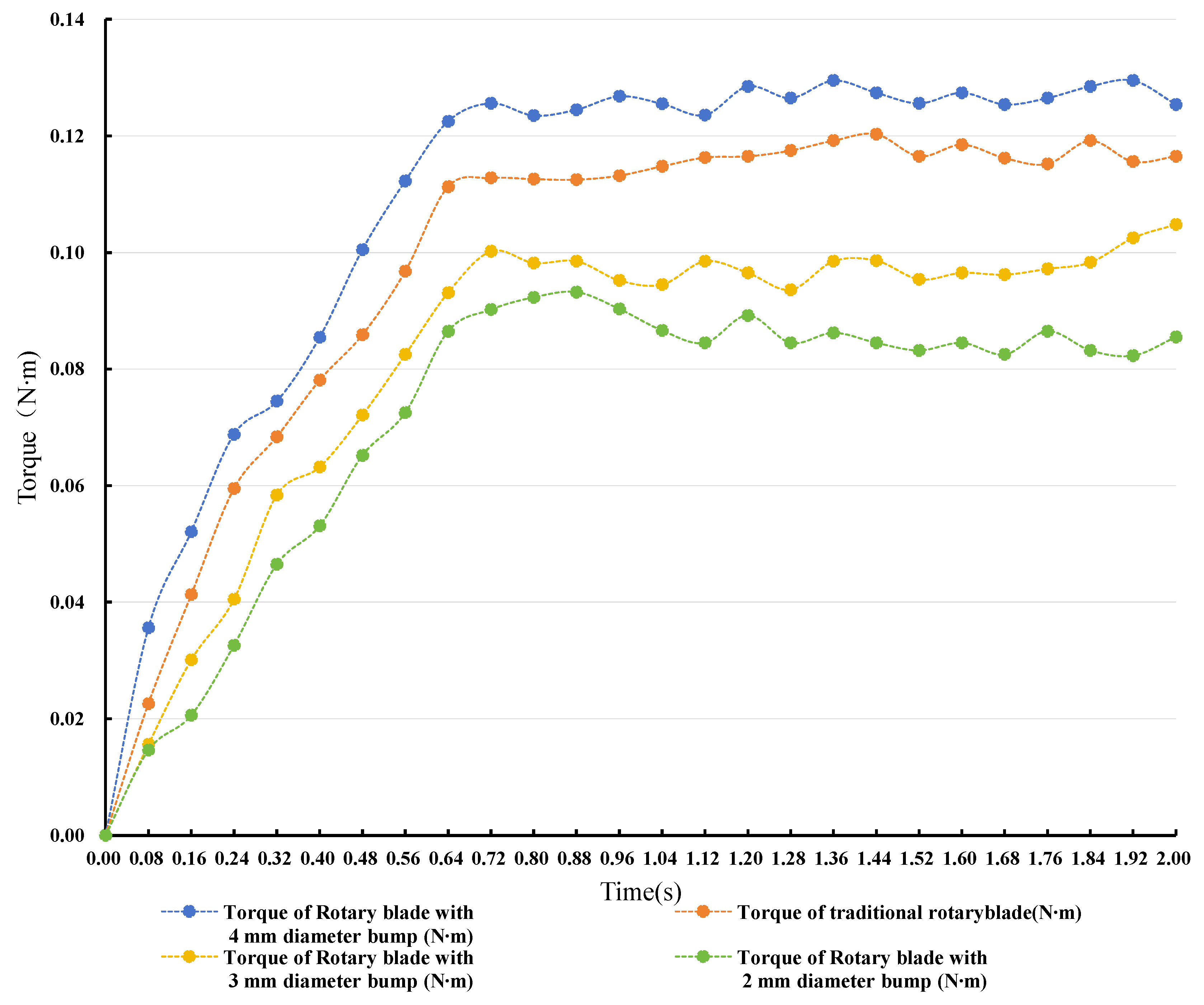
3.1. Bionic Bump Unit Size Determination
3.2. Effect of Test Factors on Power Consumption
3.2.1. Effect of Forward Speed of Rotary Tiller on Power Consumption
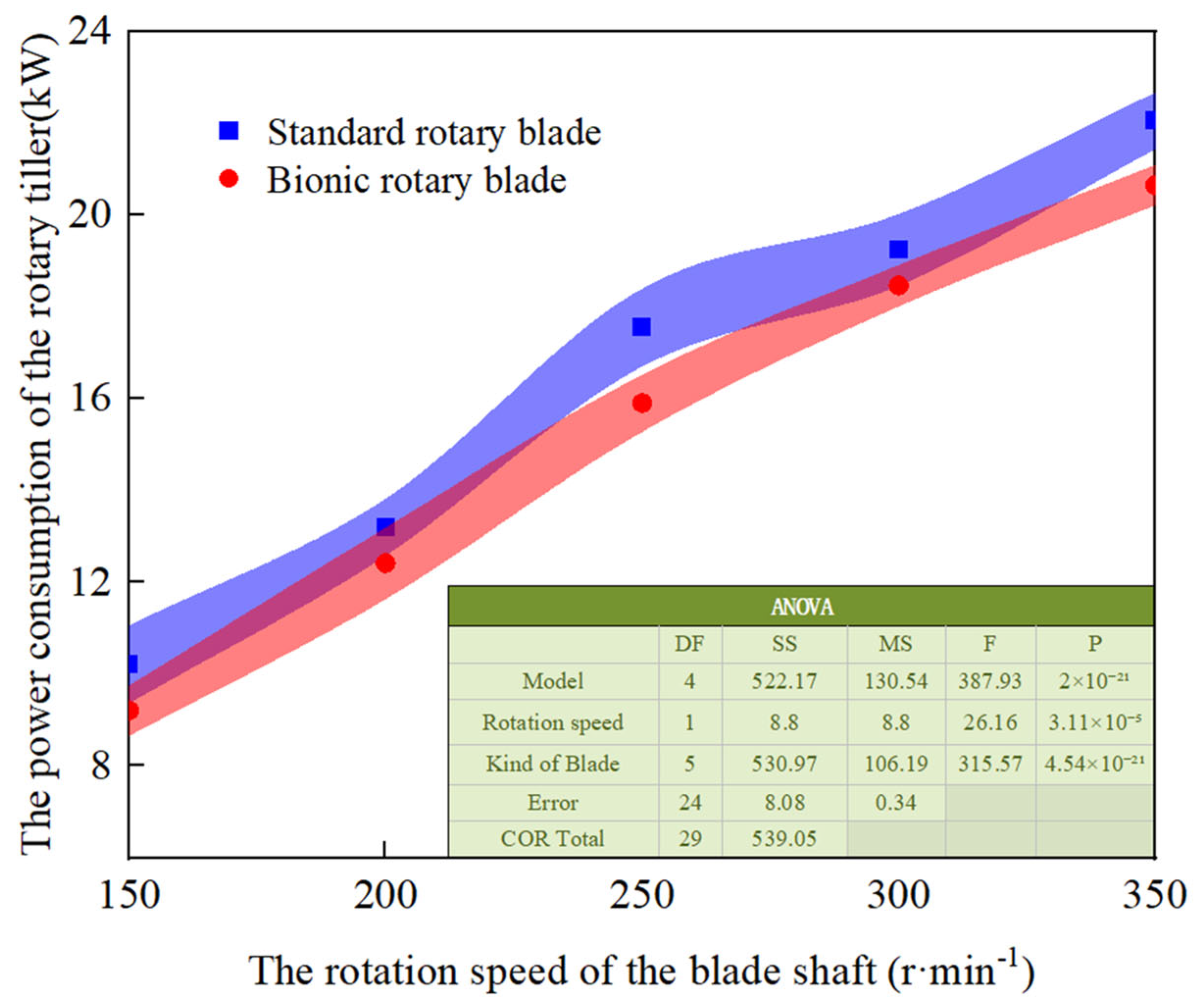
3.2.2. Effect of Rotation Speed of the Blade Shaft on Power Consumption
3.3. Effect of Test Factors on the Ground Surface Flatness
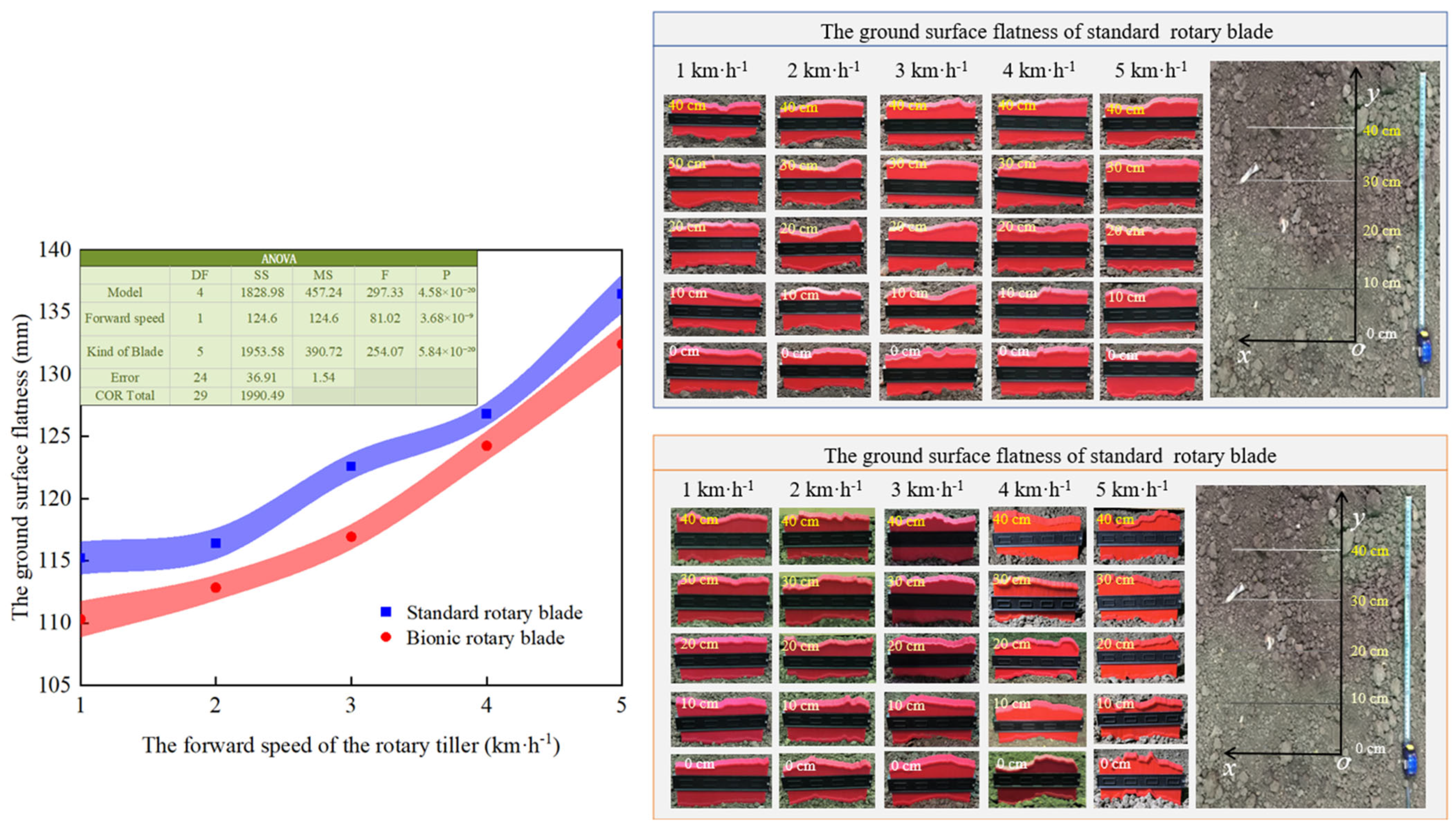
3.3.1. Effect of Forward Speed of Rotary Tiller on Ground Surface Flatness
3.3.2. Effect of the Rotation Speed of the Blade Shaft on Ground Surface Flatness
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Koller, K.; El Titi, A. Techniques of Soil Tillage. In Soil Tillage in Agroecosystems; CRC Press: Boca Raton, FL, USA, 2003; pp. 1–25. [Google Scholar]
- Zhang, X.Y.; Zhang, L.X.; Hu, X.; Wang, H.; Shi, X.B.; Ma, X. Simulation of Soil Cutting and Power Consumption Optimization of a Typical Rotary Tillage Soil Blade. Appl. Sci. 2022, 12, 8177. [Google Scholar] [CrossRef]
- Liu, G.Y.; Xia, J.F.; Zheng, K.; Cheng, J.; Wei, Y.S.; Guo, L.W.; Li, X.F.; Zhang, J.M. Design and experiments of the barrier type rotary anti-adhesion blade roller with vibration crosspiece. Trans. Chin. Soc. Agric. Eng. 2022, 38, 29–40. [Google Scholar]
- Xiong, P.Y.; Yang, Z.; Sun, Z.Q.; Zhang, Q.Q.; Huang, Y.Q.; Zhang, Z.W. Simulation analysis and experiment for three-axis working resistances of rotary blade based on discrete element method. Trans. Chin. Soc. Agric. Eng. 2018, 34, 113–121. [Google Scholar]
- Sun, J.Y.; Zhang, Z.J.; Tong, J.; Jia, H.L. Application of Bionic Technologies for Soil-Engaging Tillage Components in Northeast China. Bio-Inspired Surf. Appl. 2016, 555–578. [Google Scholar] [CrossRef]
- Xu, Z.H.; Qi, H.Y.; Gao, P.; Wang, S.; Liu, X.T.; Ma, Y.H. Biomimetic Design of Soil-Engaging Components: A Review. Biomimetics 2024, 9, 358. [Google Scholar] [CrossRef]
- Yu, H.Y.; Han, Z.W.; Zhang, J.Q.; Zhang, S.J. Bionic design of tools in cutting: Reducing adhesion, abrasion or friction. Wear 2021, 482, 203955. [Google Scholar] [CrossRef]
- Tan, Y.; Liu, S.; Ma, S.C. Application of Bionics Engineering in Innovative design of Agricultural Machinery. In Proceedings of the 2020 ASABE Annual International Meeting, Virtual, 13–15 July 2020; p. 1. [Google Scholar]
- Hu, J.P.; Xu, L.Z.; Yu, Y.; Lu, J.; Han, D.L.; Chai, X.Y.; Wu, Q.H.; Zhu, L.J. Design and Experiment of Bionic Straw-Cutting Blades Based on Locusta Migratoria Manilensis. Agriculture 2023, 13, 2231. [Google Scholar] [CrossRef]
- Li, J.; Li, H.C.; Chen, Y.Y.; Lin, P.Y.; Zhang, Q.Q.; Cheng, Y.; Yang, Z.; Huang, G.W. Research on Ditching Mechanism of Self-Excited Vibration Ditching Machine. Agronomy 2023, 13, 905. [Google Scholar] [CrossRef]
- Guo, J.; Zhang, Q.Y.; Muhammad, S.M.; Ji, C.Y.; Zhao, Z. Design and experiment of bionic mole’s toe arrangement serrated blade for soil-rototilling and straw-shattering. Trans. Chin. Soc. Agric. Eng. 2017, 33, 43–50. [Google Scholar]
- Santhanam, R. Biology and Ecology of Toxic Pufferfish; Apple Academic Press: Palm Bay, FL, USA, 2017. [Google Scholar]
- Barthlott, W.; Neinhuis, C. Purity of the Sacred Lotus, or Escape from Contamination in Biological Surfaces. Planta 1997, 202, 1–8. [Google Scholar] [CrossRef]
- Genzer, J.; Marmur, A. Biological and Synthetic Self-Cleaning Surfaces. MRS Bull. 2008, 33, 742–746. [Google Scholar] [CrossRef]
- Gao, T.Y.; Xiong, Z.X.; Li, Z.L.; Huang, X.; Liu, Y.; Cai, K.W. Precise underwater fish measurement: A geometric approach leveraging medium regression. Comput. Electron. Agric. 2024, 221, 108932. [Google Scholar] [CrossRef]
- Zhang, Y.S.; Fan, D.L.; Feng, X.M.; Hu, Y.S.; Shi, J.; Tian, G.Z. Drag reduction performance and mechanism of flexible conical microstructure film inspired by pufferfish epidermis. Ocean Eng. 2023, 271, 113760. [Google Scholar] [CrossRef]
- Liu, C.Q. Optimization of Drag Reduction Elements Model of Bionic Puffer Spines and Study of Spatial Flow Field Characteristics. Ph.D. Thesis, Jiangsu University of Science and Technology, Zhenjiang, China, 2020. [Google Scholar]
- Zhou, S.; Jiang, L.; Dong, Z.C. Overflow Control for Sustainable Development by Superwetting Surface with Biomimetic Structure. Chem. Rev. 2023, 123, 2276–2310. [Google Scholar] [CrossRef] [PubMed]
- Six, J.; Elliott, E.T.; Paustian, K. Soil macroaggregate turnover and microaggregate formation: A mechanism for C sequestration under no-tillage agriculture. Soil Biol. Biochem. 2000, 32, 2099–2103. [Google Scholar] [CrossRef]
- GB/T 5669-2017; Rotary Tillage Machinery—Blades and Blade Holders. China National Standardization Administration: Beijing, China, 2017.
- Li, J.W.; Li, X.Y.; Hu, B.; Gu, T.L.; Wang, Z.J.; Wang, H.L. Analysis of the resistance reduction mechanism of potato bionic digging shovels in clay and heavy soil conditions. Comput. Electron. Agric. 2023, 214, 108315. [Google Scholar] [CrossRef]
- Zhu, Y.H. Research on the Working Mechanism and Consumption Reduction of Rotary Burial Blade Roller for Straw Returning. Ph.D. Thesis, Huazhong Agricultural University, Wuhan, China, 2020. [Google Scholar]
- Yu, C.Y.; Liu, J.; Zhang, J.; Xue, K.; Zhang, S.; Liao, J.; Tai, Q.L.; Zhu, D.Q. Design and optimization and experimental verification of a segmented double-helix blade roller for straw returning cultivators. J. Chin. Inst. Eng. 2021, 44, 379–387. [Google Scholar] [CrossRef]
- Zhang, J.J.; Feng, G.H.; Yan, X.H.; He, Y.D.; Liu, M.N.; Xu, L.Y. Cooperative control method considering efficiency and tracking performance for unmanned hybrid tractor based on rotary tillage prediction. Energy 2024, 288, 129874. [Google Scholar] [CrossRef]
- Yang, Y.W.; Tong, J.; Ma, Y.H.; Li, M.; Jiang, X.H.; Li, J.G. Design and Experiment of Bionic Soil-cutting Blade Based on Multi-claw Combination of Mole Rat. Trans. Chin. Soc. Agric. Mach. 2018, 49, 122–128. [Google Scholar]
- Liu, X.L.; Liu, M.; He, G.H.; Yan, F.G.; Cheng, Y.N.; Liu, L. Impact Damage Behavior of the Cemented Carbide Insert in the Heavy Cutting Process. J. Mech. Eng. 2014, 50, 175–185. [Google Scholar] [CrossRef]
- Liu, M.Z.; Xie, F.P.; Liu, D.W.; Wang, X.S. Analysis and experiment of the power of blade roller in reverse-rotary ditching machine based on the granular scale effect. Trans. Chin. Soc. Agric. Eng. 2024, 40, 83–92. [Google Scholar]
- Dıaz-Zorita, M.; Perfect, E.; Grove, J.H. Disruptive methods for assessing soil structure. Soil Tillage Res. 2002, 64, 3–22. [Google Scholar] [CrossRef]
- Bartzanas, T.; Kacira, M.; Zhu, H.; Karmakar, S.; Tamimi, E.; Katsoulas, N.; Lee, I.B.; Kittas, C. Computational fluid dynamics applications to improve crop production systems. Comput. Electron. Agric. 2013, 93, 151–167. [Google Scholar] [CrossRef]
- Yuan, Y.W.; Wang, J.Y.; Zhang, X.; Zhao, S.H. Effect of rotary speed on soil and straw throwing process by stubble-crushing blade for strip tillage using DEM-CFD. Agriculture 2023, 13, 877. [Google Scholar] [CrossRef]
- Lin, H. Linking principles of soil formation and flow regimes. J. Hydrol. 2010, 393, 3–19. [Google Scholar] [CrossRef]
- Xu, H.B.; Zhang, P.; Hu, Z.C.; Mao, E.R.; Yan, J.C.; Yang, H.G. Analysis of dust diffusion from a self-propelled peanut combine using computational fluid dynamics. Biosyst. Eng. 2022, 215, 10. [Google Scholar] [CrossRef]
- Montero, E. Rényi dimensions analysis of soil particle-size distributions. Ecol. Model. 2005, 182, 305–315. [Google Scholar] [CrossRef]
- Salokhe, V.M.; Ramalingam, N. Effects of direction of rotation of a rotary tiller on properties of Bangkok clay soil. Soil Tillage Res. 2001, 63, 65–74. [Google Scholar] [CrossRef]
- Zheng, J.; Huang, H.; Liao, Y.T.; Wang, L.; Yuan, J.C.; Lin, J.X.; Liao, Q.X. Progress and suggestions on full mechanization of rapeseed production in the middle reaches of the Yangtze River. Chin. J. Oil Crop Sci. 2024, 46, 245–259. [Google Scholar]
- Yurishchev, A.; Ullmann, A.; Brauner, N. Experiments and modeling of droplets motion induced by turbulent air flow on inclined surfaces. Exp. Therm. Fluid Sci. 2023, 140, 110763. [Google Scholar] [CrossRef]
- Perdok, U.D.; Kouwenhoven, J.K. Soil-tool interactions and field performance of implements. Soil Tillage Res. 1994, 30, 283–326. [Google Scholar] [CrossRef]
- Milkevych, V.; Munkholm, L.J.; Chen, Y.; Nyord, T. Modelling approach for soil displacement in tillage using discrete element method. Soil Tillage Res. 2018, 183, 60–71. [Google Scholar] [CrossRef]
- Zeng, Z.W.; Chen, Y. Simulation of straw movement by discrete element modelling of straw-sweep-soil interaction. Biosyst. Eng. 2019, 180, 25–35. [Google Scholar] [CrossRef]
- Schmidt, J.; Werner, M.; Schindewolf, M. Wind effects on soil erosion by water—A sensitivity analysis using model simulations on catchment scale. Catena 2017, 148, 168–175. [Google Scholar] [CrossRef]
- Zhang, R.; Sun, X.M.; Han, D.L.; Zhuang, R.; Zhang, H.; Ma, J.; Wen, L.G.; Zou, M. A bionic mechanical foot with adaptive variable postures travelling on sand. J. Terramech. 2023, 107, 61–74. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Shank width | 300–0.5 mm |
| Shank thickness | 10 ± 0.5 mm |
| Hole diameter of shank | 12.5 + 0.5 mm |
| Turning radius of blade roller | R225-4 mm |
| Working width | 45–55 mm |
| Tangent plane bend angle | 120° |
| Thickness of cutting edge | 1.0~2.0 mm |
| Blade width | 12 mm |
| Parameter | Value |
|---|---|
| Auxiliary power | 44.1–55.1 kW |
| Overall dimensions | 1850 × 800 × 850 mm |
| Total installed blades | 36 |
| Width | 160 cm |
| Property | Value |
|---|---|
| Density of soil particles (kg∙m−3) | 2550 |
| Density of steel (kg∙m−3) | 7850 |
| Poisson’s ratio of soil | 0.35 |
| Poisson’s ratio of steel | 0.29 |
| Shear modulus of soil (Pa) | 1 × 108 |
| Shear modulus of steel (Pa) | 7.9 × 1010 |
| Coefficient of static friction of soil–soil | 0.83 |
| Coefficient of rolling friction of soil–soil | 0.25 |
| Coefficient of restitution friction for soil–soil | 0.66 |
| Coefficient of static friction for soil–steel | 0.56 |
| Coefficient of rolling friction for soil–steel | 0.18 |
| Coefficient of restitution of soil–soil | 0.60 |
| Cohesion interaction of soil–soil (J∙m−2) | 7.91 |
| Cohesion interaction of soil–steel (J∙m−2) | 6.00 |
| Parameter | Index | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| Rotation speed of the blade shaft/(r∙min−1) | 150 | 200 | 250 | 300 | 350 |
| Forward speed of the rotary tiller/(km∙h−1) | 1 | 2 | 3 | 4 | 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Y.; Gao, Y.; Xie, C.; Tong, J.; Wang, Q.; Feng, X. Design and Test of an Energy-Saving Bionic-Inspired Rotary Blade: A Study on Power Consumption and Soil Surface Quality. Agriculture 2025, 15, 938. https://doi.org/10.3390/agriculture15090938
Qin Y, Gao Y, Xie C, Tong J, Wang Q, Feng X. Design and Test of an Energy-Saving Bionic-Inspired Rotary Blade: A Study on Power Consumption and Soil Surface Quality. Agriculture. 2025; 15(9):938. https://doi.org/10.3390/agriculture15090938
Chicago/Turabian StyleQin, Yue, Yunpeng Gao, Chenggong Xie, Jiarui Tong, Qi Wang, and Xin Feng. 2025. "Design and Test of an Energy-Saving Bionic-Inspired Rotary Blade: A Study on Power Consumption and Soil Surface Quality" Agriculture 15, no. 9: 938. https://doi.org/10.3390/agriculture15090938
APA StyleQin, Y., Gao, Y., Xie, C., Tong, J., Wang, Q., & Feng, X. (2025). Design and Test of an Energy-Saving Bionic-Inspired Rotary Blade: A Study on Power Consumption and Soil Surface Quality. Agriculture, 15(9), 938. https://doi.org/10.3390/agriculture15090938