
Pruning Branch Recognition and Pruning Point Localization for Walnut (Juglans regia L.) Trees Based on Point Cloud Semantic Segmentation


Abstract
1. Introduction
2. Materials and Methods
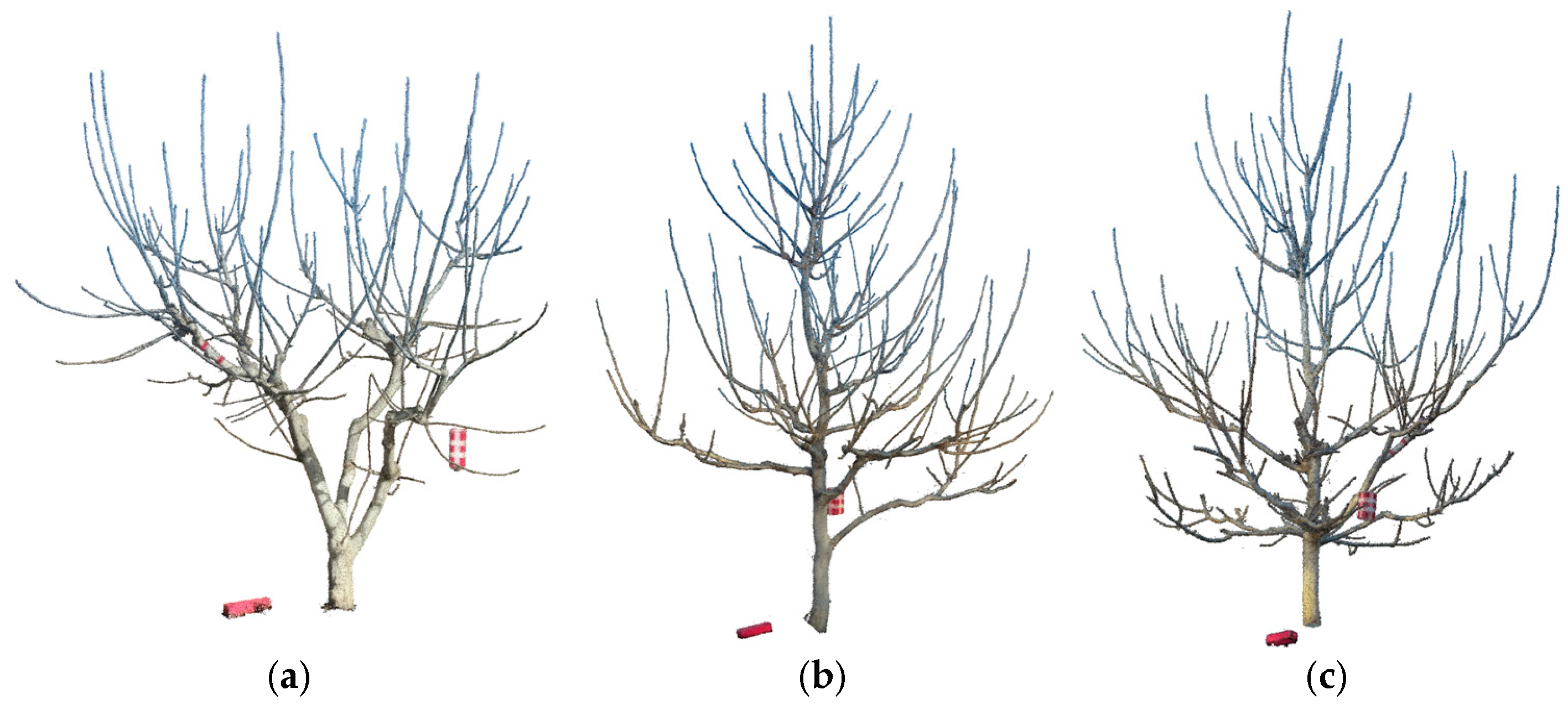
2.1. Data Collection and Point Cloud Generation
2.2. Point Cloud Segmentation
2.2.1. Semantic Segmentation Based on Walnut-PointNet
- (1)
- Introduction of CAMA-MLP
- (2)
- Introduction of central point feature
2.2.2. Point Cloud Annotation and Network Training
2.2.3. Performance Evaluation
2.3. Branch Clustering
2.4. Pruning Method
2.5. Pruning Points Positioning
2.5.1. Extraction of Branch Parameter
2.5.2. Pruning Points Determination
3. Results
3.1. Semantic Segmentation Result
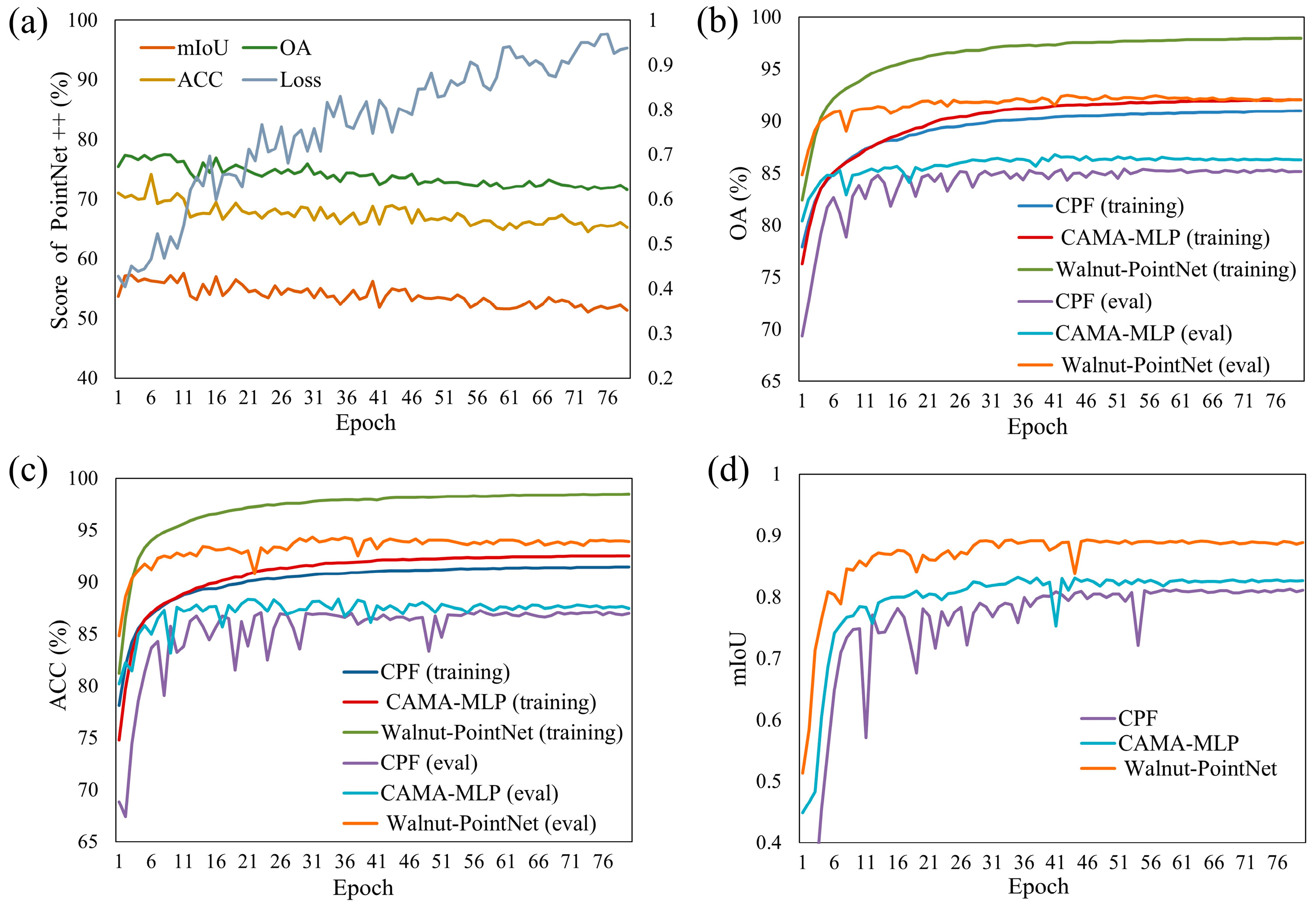
3.1.1. Ablation Experiments for Method Effectiveness Verification
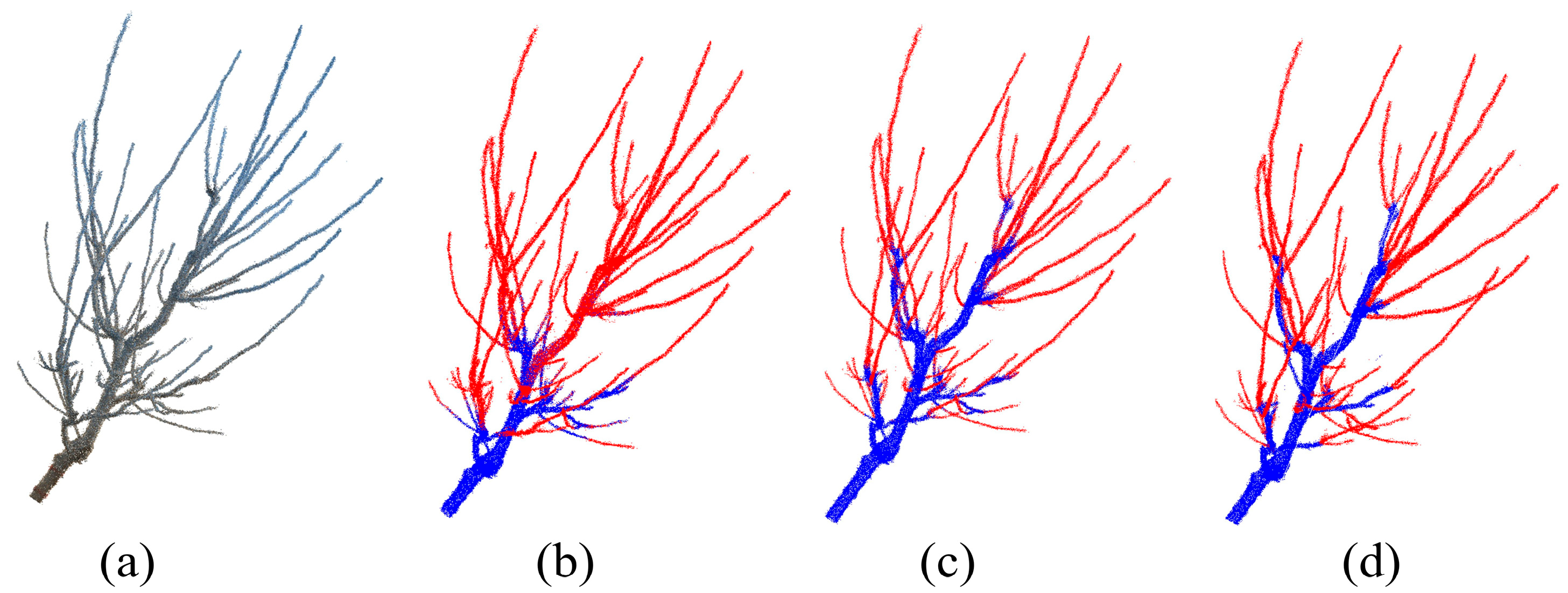
3.1.2. Branch Segmentation Evaluation and Visualization
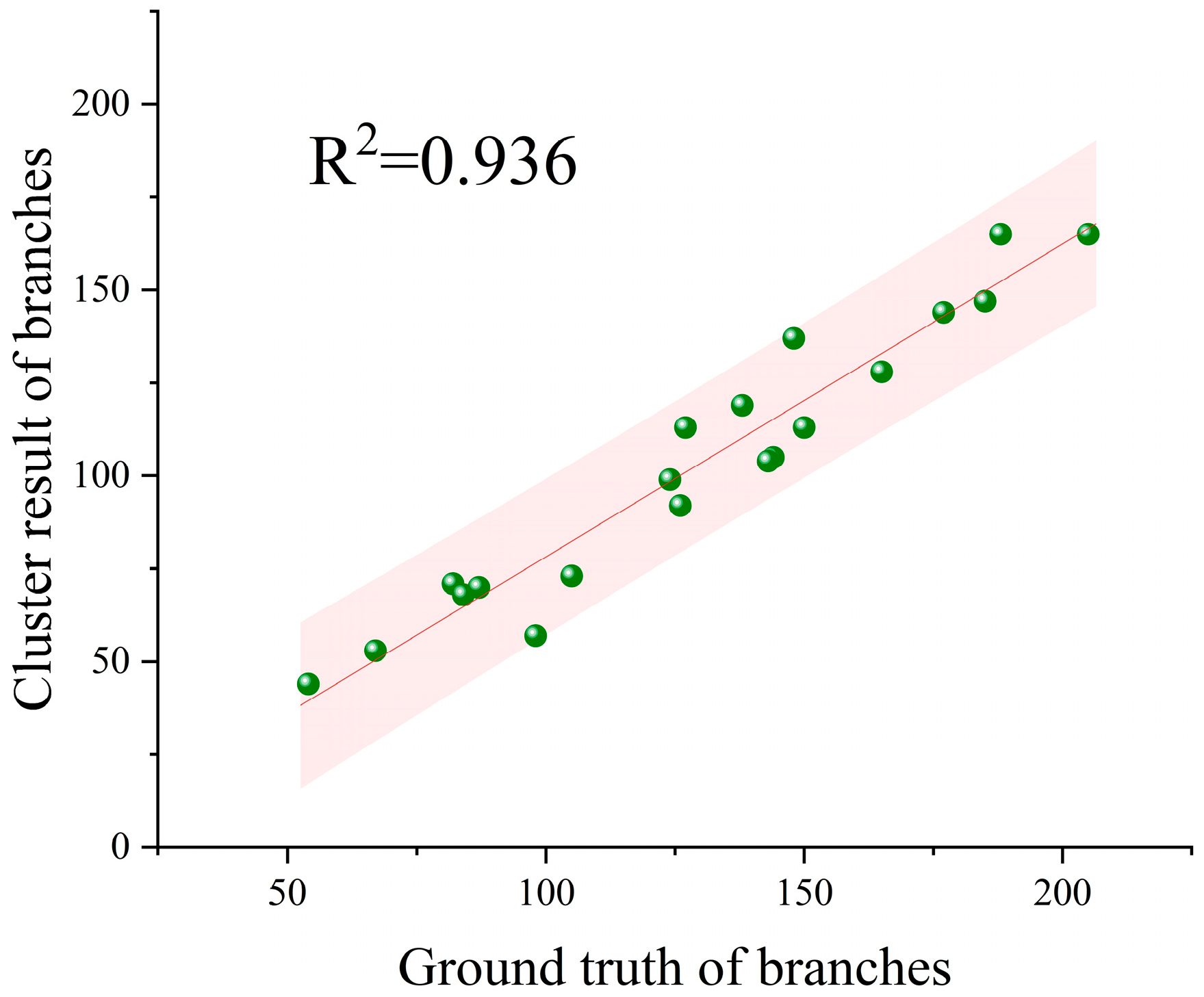
3.2. Analysis of the Clustering Result
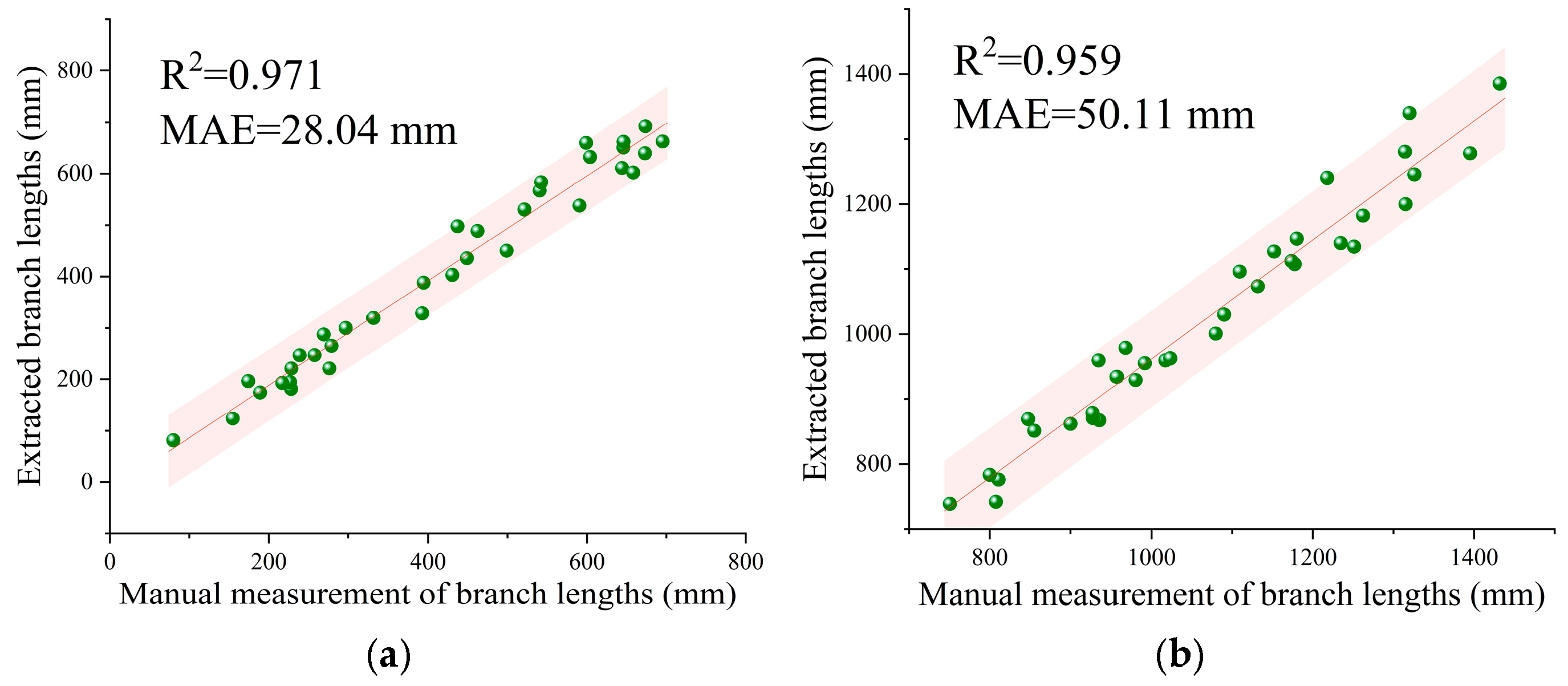
3.3. Results of Branch Parameter Extraction
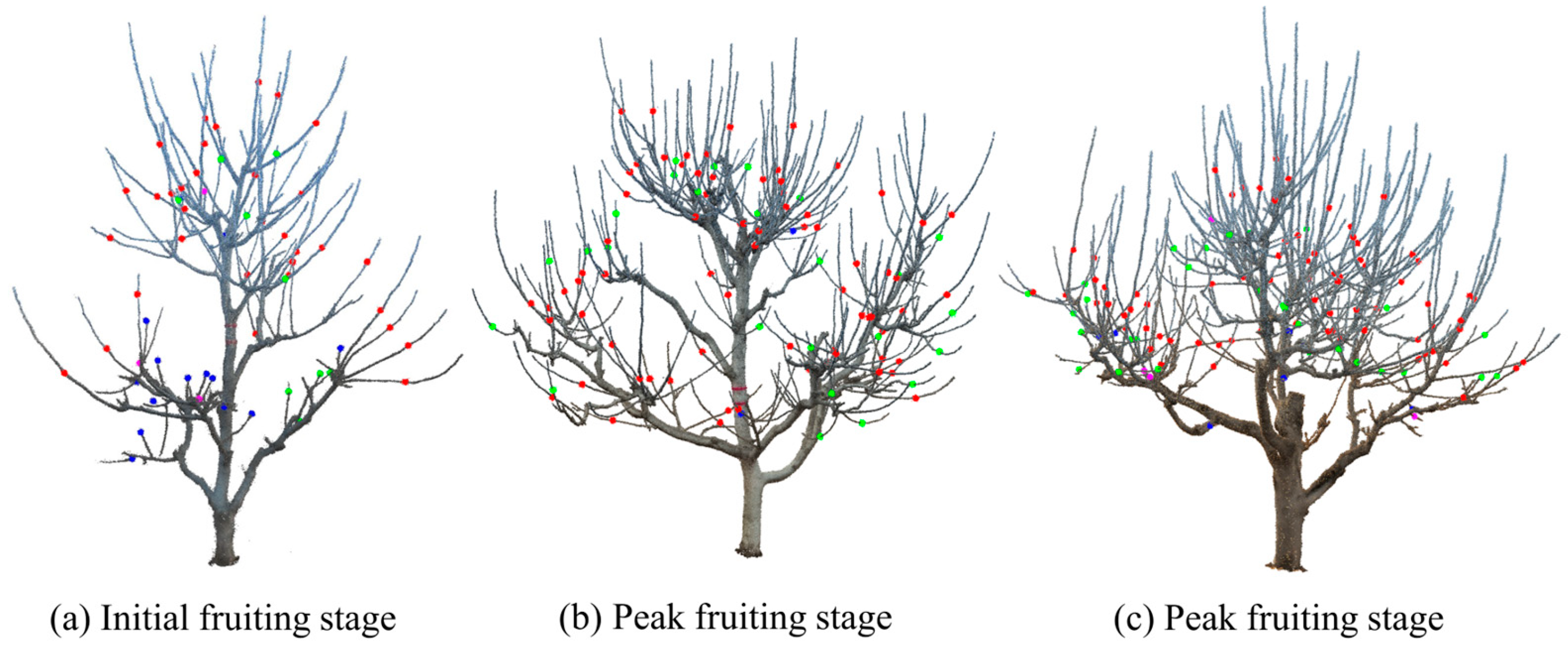
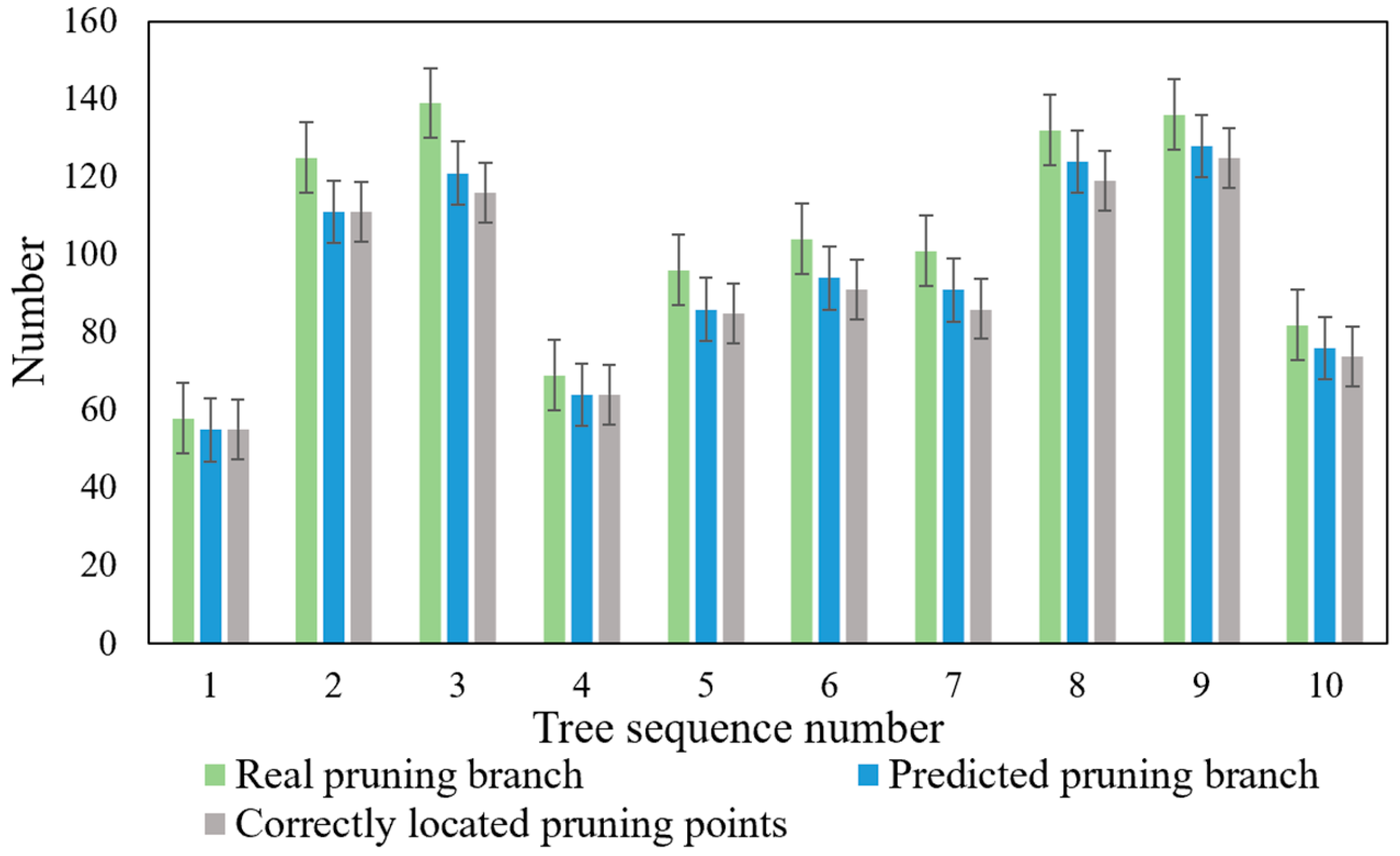
3.4. Results of Pruning Points Positioning
4. Discussion
4.1. Accuracy and Effects of Branch Semantic Segmentation
4.2. Reliability and Effects of Pruning Points Positioning
4.3. Summary and the Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zahid, A.; Mahmud, M.S.; He, L.; Heinemann, P.; Choi, D.; Schupp, J. Technological advancements towards developing a robotic pruner for apple trees: A review. Comput. Electron. Agric. 2021, 189, 106383. [Google Scholar] [CrossRef]
- Amatya, S.; Karkee, M.; Gongal, A.; Zhang, Q.; Whiting, M.D. Detection of cherry tree branches with full foliage in planar architecture for automated sweet-cherry harvesting. Biosyst. Eng. 2016, 146, 3–15. [Google Scholar] [CrossRef]
- Tabb, A.; Medeiros, H. Automatic segmentation of trees in dynamic outdoor environments. Comput. Ind. 2018, 98, 90–99. [Google Scholar] [CrossRef]
- Chen, Z.; Ting, D.; Newbury, R.; Chen, C. Semantic segmentation for partially occluded apple trees based on deep learning. Comput. Electron. Agric. 2021, 181, 105952. [Google Scholar] [CrossRef]
- Zhang, X.; Karkee, M.; Zhang, Q.; Whiting, M.D. Computer vision-based tree trunk and branch identification and shaking points detection in Dense-Foliage canopy for automated harvesting of apples. J. Field Robot. 2021, 38, 476–493. [Google Scholar] [CrossRef]
- Sapkota, R.; Ahmed, D.; Karkee, M. Comparing YOLOv8 and Mask R-CNN for instance segmentation in complex orchard environments. Artif. Intell. Agric. 2024, 13, 84–99. [Google Scholar] [CrossRef]
- Sapkota, R.; Karkee, M. Integrating YOLO11 and Convolution Block Attention Module for Multi-Season Segmentation of Tree Trunks and Branches in Commercial Apple Orchards. arXiv 2024, arXiv:2412.05728. [Google Scholar]
- Tong, S.; Yue, Y.; Li, W.; Wang, Y.; Kang, F.; Feng, C. Branch Identification and Junction Points Location for Apple Trees Based on Deep Learning. Remote Sens. 2022, 14, 4495. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, Y.; Liang, S.; Liu, P. Research on Key Algorithm for Sichuan Pepper Pruning Based on Improved Mask R-CNN. Sustainability 2024, 16, 3416. [Google Scholar] [CrossRef]
- Zheng, Z.; Liu, Y.; Dong, J.; Zhao, P.; Qiao, Y.; Sun, S.; Huang, Y. A novel jujube tree trunk and branch salient object detection method for catch-and-shake robotic visual perception. Expert Syst. Appl. 2024, 251, 124022. [Google Scholar] [CrossRef]
- Majeed, Y.; Zhang, J.; Zhang, X.; Fu, L.; Karkee, M.; Zhang, Q.; Whiting, M.D. Deep learning based segmentation for automated training of apple trees on trellis wires. Comput. Electron. Agric. 2020, 170, 105277. [Google Scholar] [CrossRef]
- Borrenpohl, D.; Karkee, M. Automated pruning decisions in dormant sweet cherry canopies using instance segmentation. Comput. Electron. Agric. 2023, 207, 107716. [Google Scholar] [CrossRef]
- Li, C.; Pan, Y.; Li, D.; Fan, J.; Li, B.; Zhao, Y.; Wang, J. A curved path extraction method using RGB-D multimodal data for single-edge guided navigation in irregularly shaped fields. Expert Syst. Appl. 2024, 255, 124586. [Google Scholar] [CrossRef]
- Chen, L.Z.; Lin, Z.; Wang, Z.; Yang, Y.L.; Cheng, M.M. Spatial Information Guided Convolution for Real-Time RGBD Semantic Segmentation. IEEE Trans. Image Process. 2021, 30, 2313–2324. [Google Scholar] [CrossRef]
- Kang, S.; Li, D.; Li, B.; Zhu, J.; Long, S.; Wang, J. Maturity identification and category determination method of broccoli based on semantic segmentation models. Comput. Electron. Agric. 2024, 217, 108633. [Google Scholar] [CrossRef]
- Tan, C.; Sun, J.; Paterson, A.H.; Song, H.; Li, C. Three-view cotton flower counting through multi-object tracking and RGB-D imagery. Biosyst. Eng. 2024, 246, 233–247. [Google Scholar] [CrossRef]
- Karkee, M.; Adhikari, B.; Amatya, S.; Zhang, Q. Identification of pruning branches in tall spindle apple trees for automated pruning. Comput. Electron. Agric. 2014, 103, 127–135. [Google Scholar] [CrossRef]
- Li, L.; Fu, W.; Zhang, B.; Yang, Y.; Ge, Y.; Shen, C. Branch segmentation and phenotype extraction of apple trees based on improved Laplace algorithm. Comput. Electron. Agric. 2025, 232, 109998. [Google Scholar] [CrossRef]
- Sarker, S.; Sarker, P.; Stone, G.; Gorman, R.; Tavakkoli, A.; Bebis, G.; Sattarvand, J. A comprehensive overview of deep learning techniques for 3D point cloud classification and semantic segmentation. Mach. Vis. Appl. 2024, 35, 67. [Google Scholar] [CrossRef]
- Windrim, L.; Bryson, M. Detection, Segmentation, and Model Fitting of Individual Tree Stems from Airborne Laser Scanning of Forests Using Deep Learning. Remote Sens. 2020, 12, 1469. [Google Scholar] [CrossRef]
- Chen, X.; Jiang, K.; Zhu, Y.; Wang, X.; Yun, T. Individual Tree Crown Segmentation Directly from UAV-Borne LiDAR Data Using the PointNet of Deep Learning. Forests 2021, 12, 131. [Google Scholar] [CrossRef]
- Henrich, J.; van Delden, J. Towards general deep-learning-based tree instance segmentation models. arXiv 2024, arXiv:2405.02061. [Google Scholar]
- Ma, B.; Du, J.; Wang, L.; Jiang, H.; Zhou, M. Automatic branch detection of jujube trees based on 3D reconstruction for dormant pruning using the deep learning-based method. Comput. Electron. Agric. 2021, 190, 106484. [Google Scholar] [CrossRef]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space. arXiv 2017, arXiv:1706.02413. [Google Scholar]
- Sun, X.; He, L.; Jiang, H.; Li, R.; Mao, W.; Zhang, D.; Majeed, Y.; Andriyanov, N.; Soloviev, V.; Fu, L. Morphological estimation of primary branch length of individual apple trees during the deciduous period in modern orchard based on PointNet++. Comput. Electron. Agric. 2024, 220, 108873. [Google Scholar] [CrossRef]
- Jiang, L.; Li, C.; Fu, L. Apple tree architectural trait phenotyping with organ-level instance segmentation from point cloud. Comput. Electron. Agric. 2025, 229, 109708. [Google Scholar] [CrossRef]
- Guan, H.; Zhang, R.; Lu, T.; Lv, Q.; Ge, B.; Huang, F. PDEC-Net: An Improved Single Tree Segmentation Method for Urban Mobile Laser Scanning Point Clouds Based on PDE-Net. In Proceedings of the IGARSS 2024—2024 IEEE International Geoscience and Remote Sensing Symposium, Athens, Greece, 7–12 July 2024; pp. 8551–8554. [Google Scholar]
- Mu, S.; Dai, N.; Yuan, J.; Liu, X.; Xin, Z.; Meng, X. S2CPL: A novel method of the harvest evaluation and subsoil 3D cutting-Point location for selective harvesting of green asparagus. Comput. Electron. Agric. 2024, 225, 24. [Google Scholar] [CrossRef]
- Tong, S.; Zhang, J.; Li, W.; Wang, Y.; Kang, F. An image-based system for locating pruning points in apple trees using instance segmentation and RGB-D images. Biosyst. Eng. 2023, 236, 277–286. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Y.; Tong, S.; Chen, C.; Kang, F. Grapevine Branch Recognition and Pruning Point Localization Technology Based on Image Processing. Appl. Sci. 2024, 14, 3327. [Google Scholar] [CrossRef]
- Li, L.; Ma, S.; Li, Y.; Huo, P.; Peng, C.; Li, W. Tree-PointNet: A Novel Neural Network for Dormant Apple Trees Using Semi-Circle-Based Point Cloud for Robotic Pruning. J. ASABE 2024, 67, 1405–1413. [Google Scholar] [CrossRef]
- Fu, Y.; Xia, Y.; Zhang, H.; Fu, M.; Wang, Y.; Fu, W.; Shen, C. Skeleton extraction and pruning point identification of jujube tree for dormant pruning using space colonization algorithm. Front. Plant Sci. 2023, 13, 1103794. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Zhang, Z.; Wang, X.; Fu, W.; Li, J. Automatic reconstruction and modeling of dormant jujube trees using three-view image constraints for intelligent pruning applications. Comput. Electron. Agric. 2023, 212, 108149. [Google Scholar] [CrossRef]
- Giang, T.T.H.; Ryoo, Y.-J. Pruning Points Detection of Sweet Pepper Plants Using 3D Point Clouds and Semantic Segmentation Neural Network. Sensors 2023, 23, 4040. [Google Scholar] [CrossRef] [PubMed]
- Gebrayel, F.; Mujica, M.; Danès, P. Visual Servoing for Vine Pruning based on Point Cloud Alignment. In Proceedings of the Informatics in Control, Automation and Robotics—21st ICINCO, Porto, Portugal, 18–20 November 2024. [Google Scholar]
- You, A.; Grimm, C.; Silwal, A.; Davidson, J.R. Semantics-Guided Skeletonization of Sweet Cherry Trees for Robotic Pruning. arXiv 2021, arXiv:2103.02833. [Google Scholar]
- Silwal, A.; Yandun, F.; Nellithimaru, A.; Bates, T.; Kantor, G. Bumblebee: A Path Towards Fully Autonomous Robotic Vine Pruning. arXiv 2021, arXiv:2112.00291. [Google Scholar] [CrossRef]
- You, A.; Parayil, N.; Krishna, J.G.; Bhattarai, U.; Sapkota, R.; Ahmed, D.; Whiting, M.; Karkee, M.; Grimm, C.M.; Davidson, J.R. Semiautonomous Precision Pruning of Upright Fruiting Offshoot Orchard Systems: An Integrated Approach. IEEE Robot. Autom. Mag. 2023, 30, 10–19. [Google Scholar] [CrossRef]
- Ma, X.; Qin, C.; You, H.; Ran, H.; Fu, Y. Rethinking Network Design and Local Geometry in Point Cloud: A Simple Residual MLP Framework. arXiv 2022, arXiv:2202.07123. [Google Scholar]
- Zhao, H.; Jiang, L.; Jia, J.; Torr, P.H.S.; Koltun, V. Point Transformer. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021; pp. 16239–16248. [Google Scholar]
- Narbayeva, A.; Akça, Y. Comparison of Different Pruning Methods for Training Young Fernor Walnut Trees. J. Agric. Fac. Gaziosmanpasa Univ. 2024, 41, 25–32. [Google Scholar] [CrossRef]
- Lu, H.; Li, B.; Yang, G.; Fan, G.; Wang, H.; Pang, Y.; Wang, Z.; Lian, Y.; Xu, H.; Huang, H. Towards a point cloud understanding framework for forest scene semantic segmentation across forest types and sensor platforms. Remote Sens. Environ. 2025, 318, 114591. [Google Scholar] [CrossRef]
- Chen, Q.; Luo, H.; Cheng, Y.; Xie, M.; Nan, D. An Individual Tree Detection and Segmentation Method from TLS and MLS Point Clouds Based on Improved Seed Points. Forests 2024, 15, 1083. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classification | Length | Short-Cutting Type | Retention Length |
|---|---|---|---|
| Water sprout | Above 70 cm | Heavy | Retain 40 cm |
| Long branch | 30–70 cm | Medium | Retain 30 cm |
| Medium branch | 15–30 cm | Light | Retain 15 cm |
| Short branch | 5–15 cm | No | - |
| Classification | Length | Short-Cutting Type | Retention Length |
|---|---|---|---|
| Water sprout | Above 60 cm | Heavy | Retain 50 cm |
| Long branch | 40–60 cm | Medium | Retain 40 cm |
| Medium branch | 15–40 cm | No | - |
| Short branch | 5–15 cm | No | - |
| Model | OA | ACC | IoU1 | IoU2 | IoU3 | mIoU | Epoch |
|---|---|---|---|---|---|---|---|
| PointNet++ | 77.12 | 70.61 | 0.650 | 0.608 | 0.520 | 0.593 | 80 |
| with CPF | 86.41 | 88.26 | 0.819 | 0.764 | 0.916 | 0.833 | 80 |
| with CAMA-MLP | 87.54 | 88.79 | 0.831 | 0.804 | 0.909 | 0.848 | 80 |
| Walnut-PointNet (ours) | 93.39 | 95.29 | 0.887 | 0.853 | 0.995 | 0.912 | 80 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; Bai, X.; Xu, D.; Li, W. Pruning Branch Recognition and Pruning Point Localization for Walnut (Juglans regia L.) Trees Based on Point Cloud Semantic Segmentation. Agriculture 2025, 15, 817. https://doi.org/10.3390/agriculture15080817
Zhu W, Bai X, Xu D, Li W. Pruning Branch Recognition and Pruning Point Localization for Walnut (Juglans regia L.) Trees Based on Point Cloud Semantic Segmentation. Agriculture. 2025; 15(8):817. https://doi.org/10.3390/agriculture15080817
Chicago/Turabian StyleZhu, Wei, Xiaopeng Bai, Daochun Xu, and Wenbin Li. 2025. "Pruning Branch Recognition and Pruning Point Localization for Walnut (Juglans regia L.) Trees Based on Point Cloud Semantic Segmentation" Agriculture 15, no. 8: 817. https://doi.org/10.3390/agriculture15080817
APA StyleZhu, W., Bai, X., Xu, D., & Li, W. (2025). Pruning Branch Recognition and Pruning Point Localization for Walnut (Juglans regia L.) Trees Based on Point Cloud Semantic Segmentation. Agriculture, 15(8), 817. https://doi.org/10.3390/agriculture15080817