
Design and Parameter Optimization of Drum Pick-Up Machine Based on Archimedean Curve

 ,
, 
Abstract
1. Introduction
2. Materials and Methods
2.1. Related Works
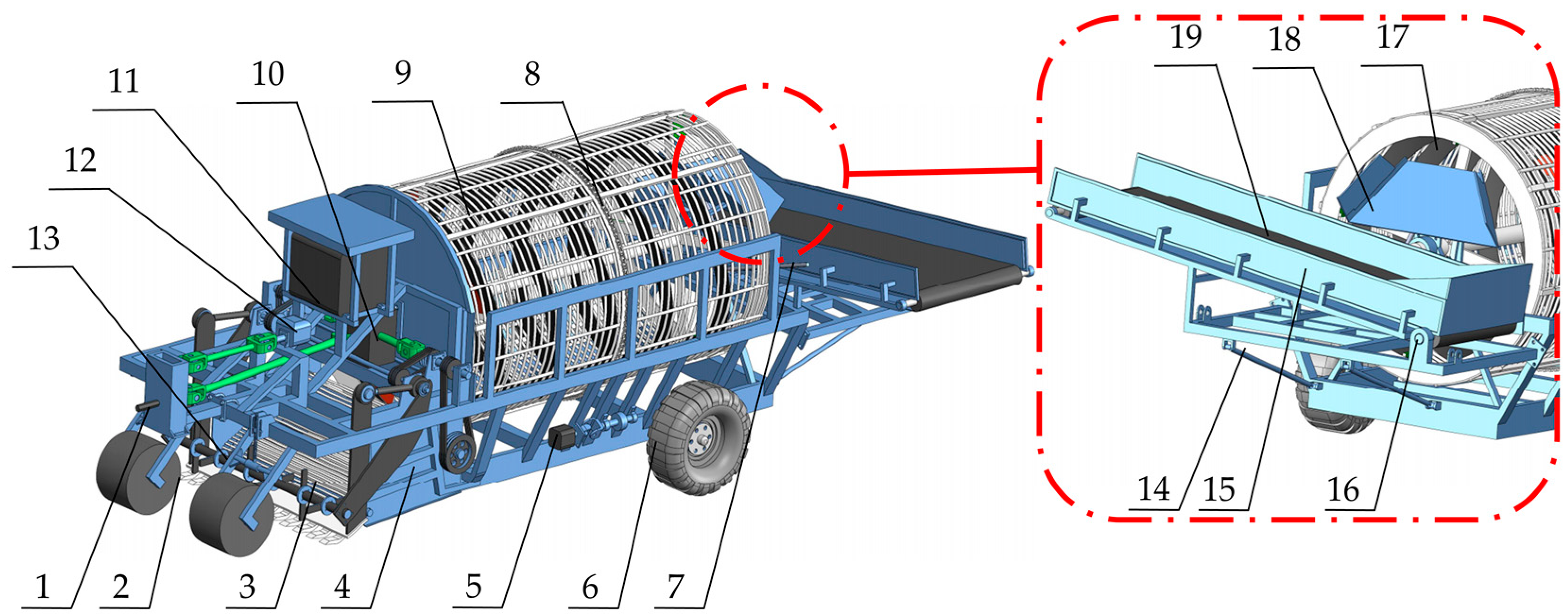
2.2. Drum Stone Picker Whole Machine Structure
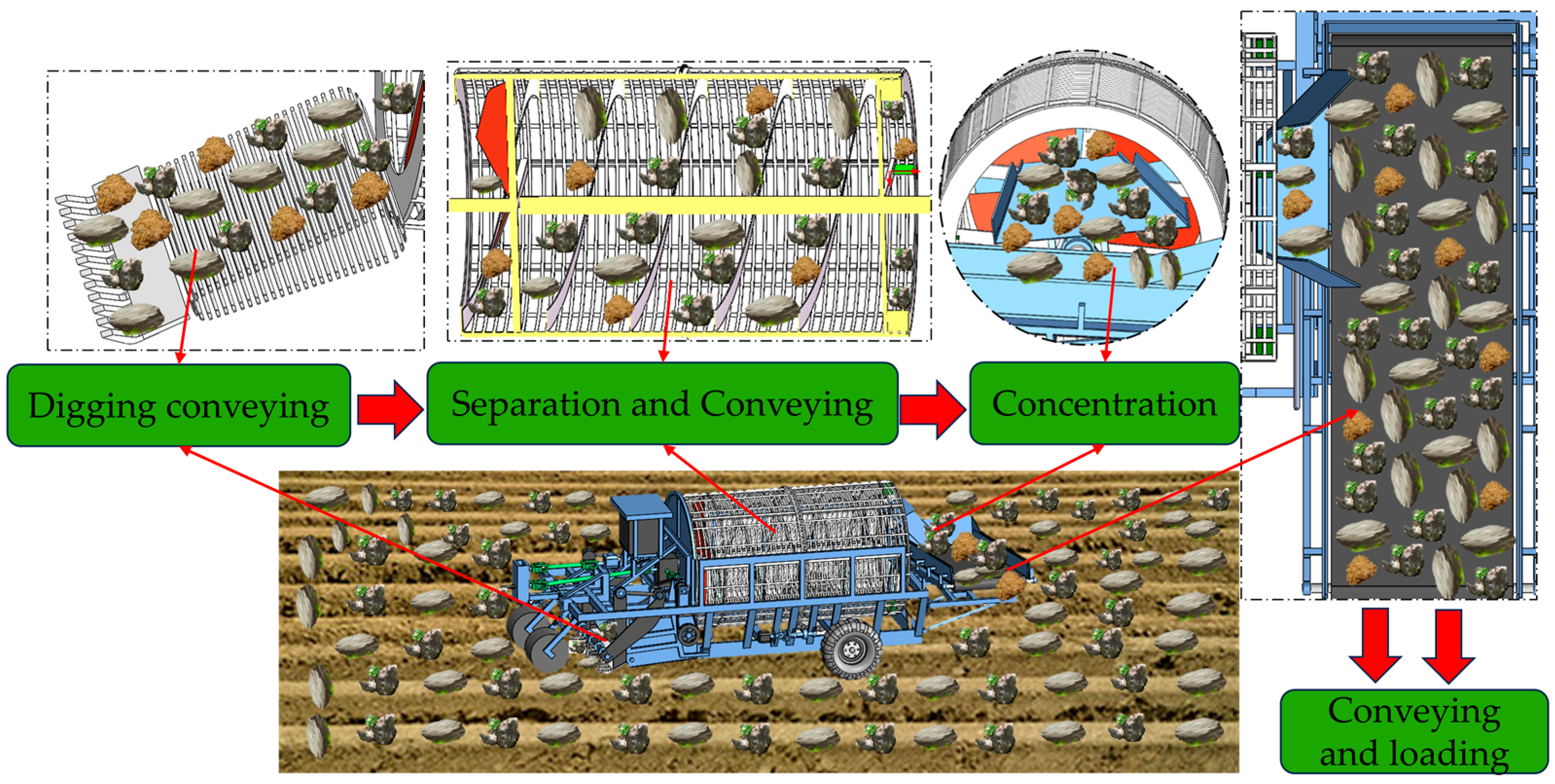
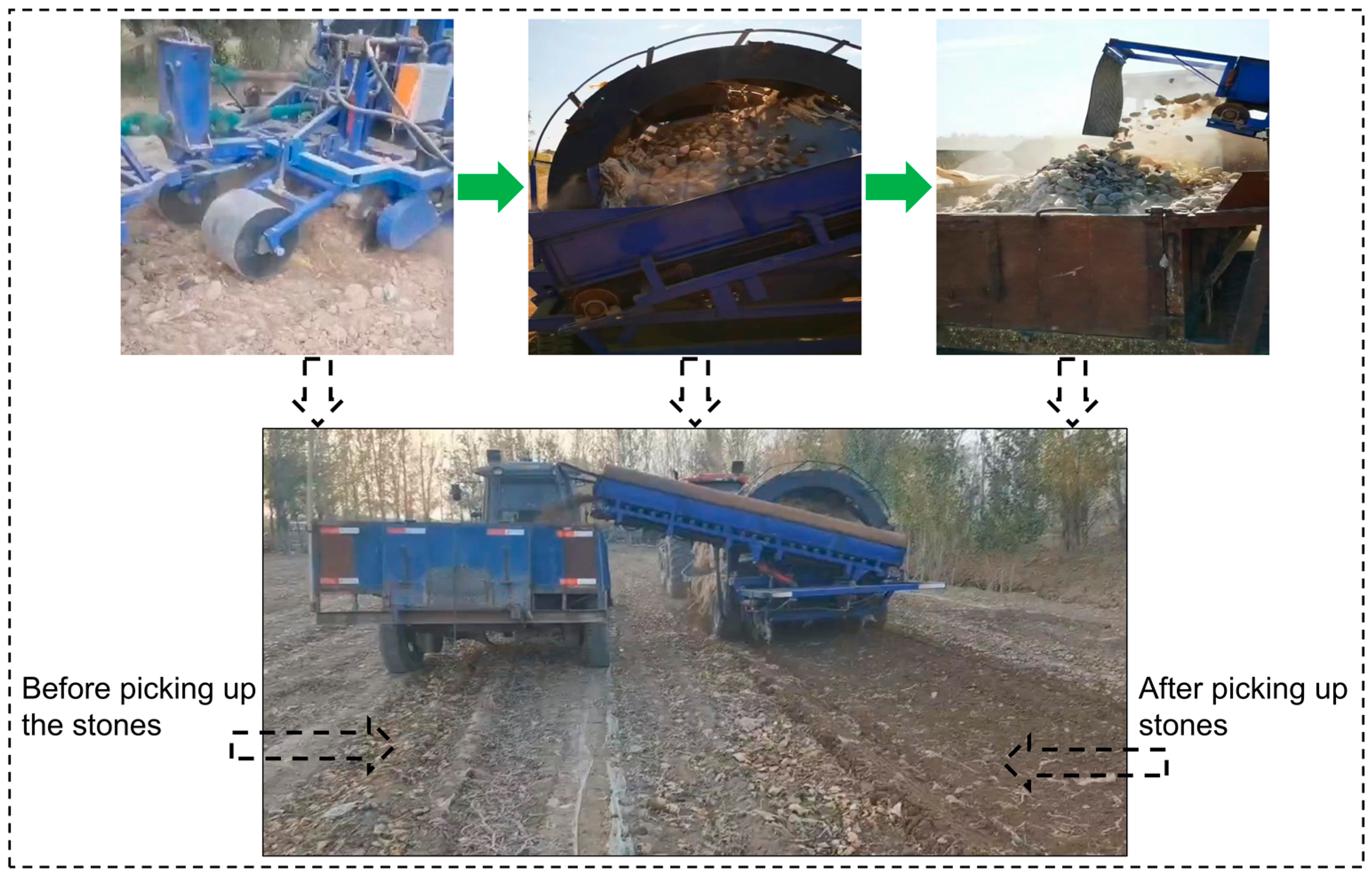
2.3. Working Principle
2.4. Design and Performance Analysis of Key Components
2.4.1. Design of Spiral Drum Separation Device
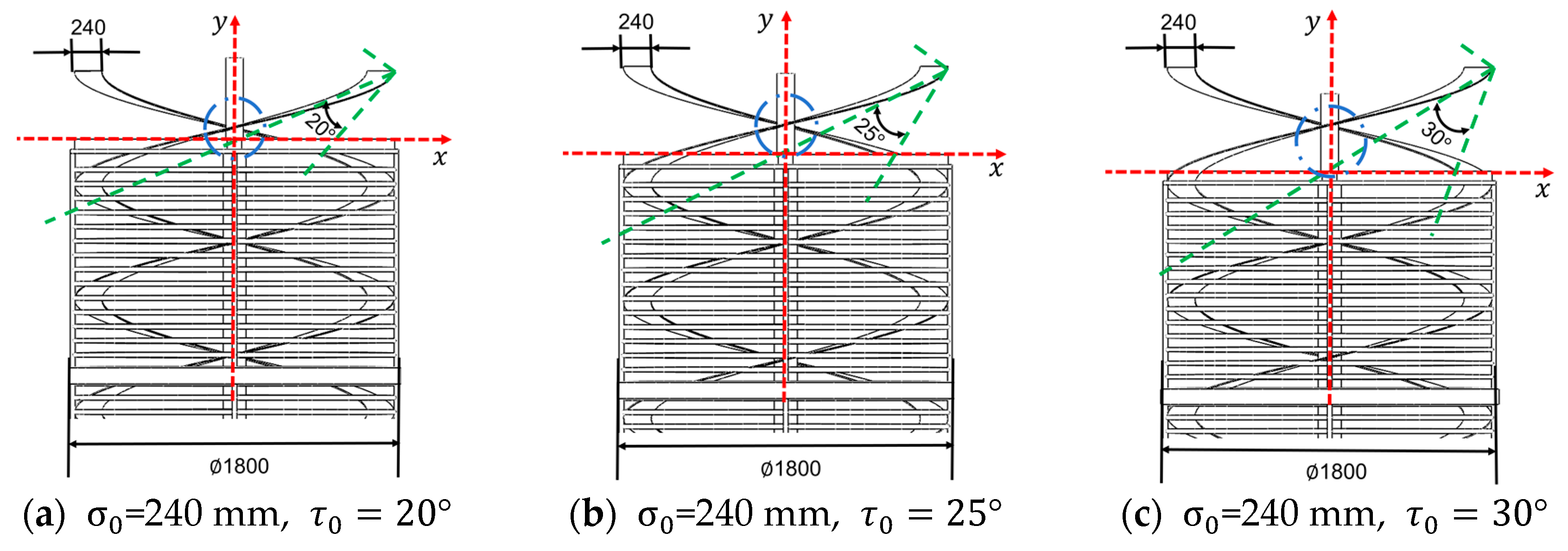
2.4.2. Spiral Blade Curve Design
2.4.3. Spiral Blade Size Design
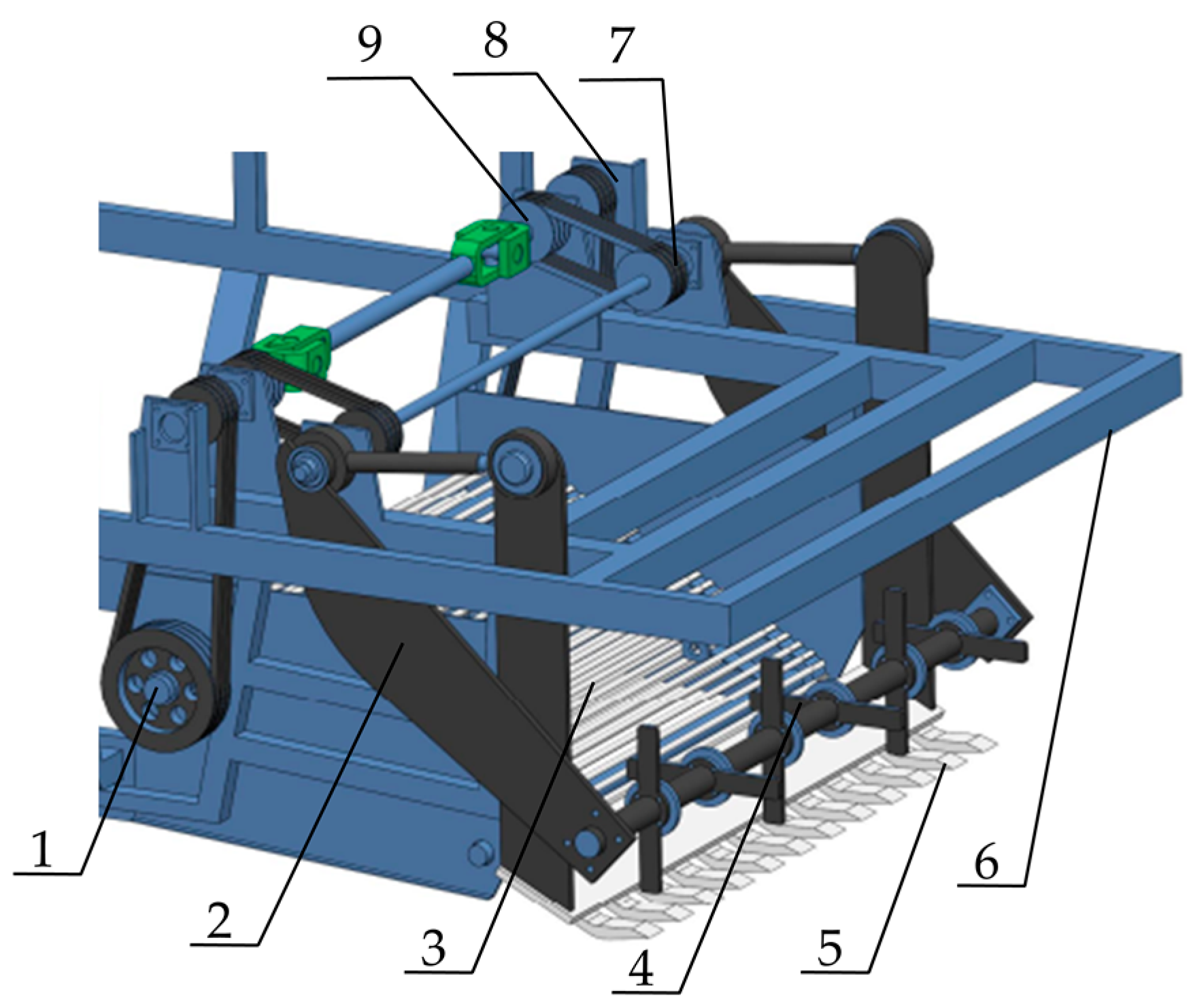
2.4.4. Design of Excavation and Conveying Device
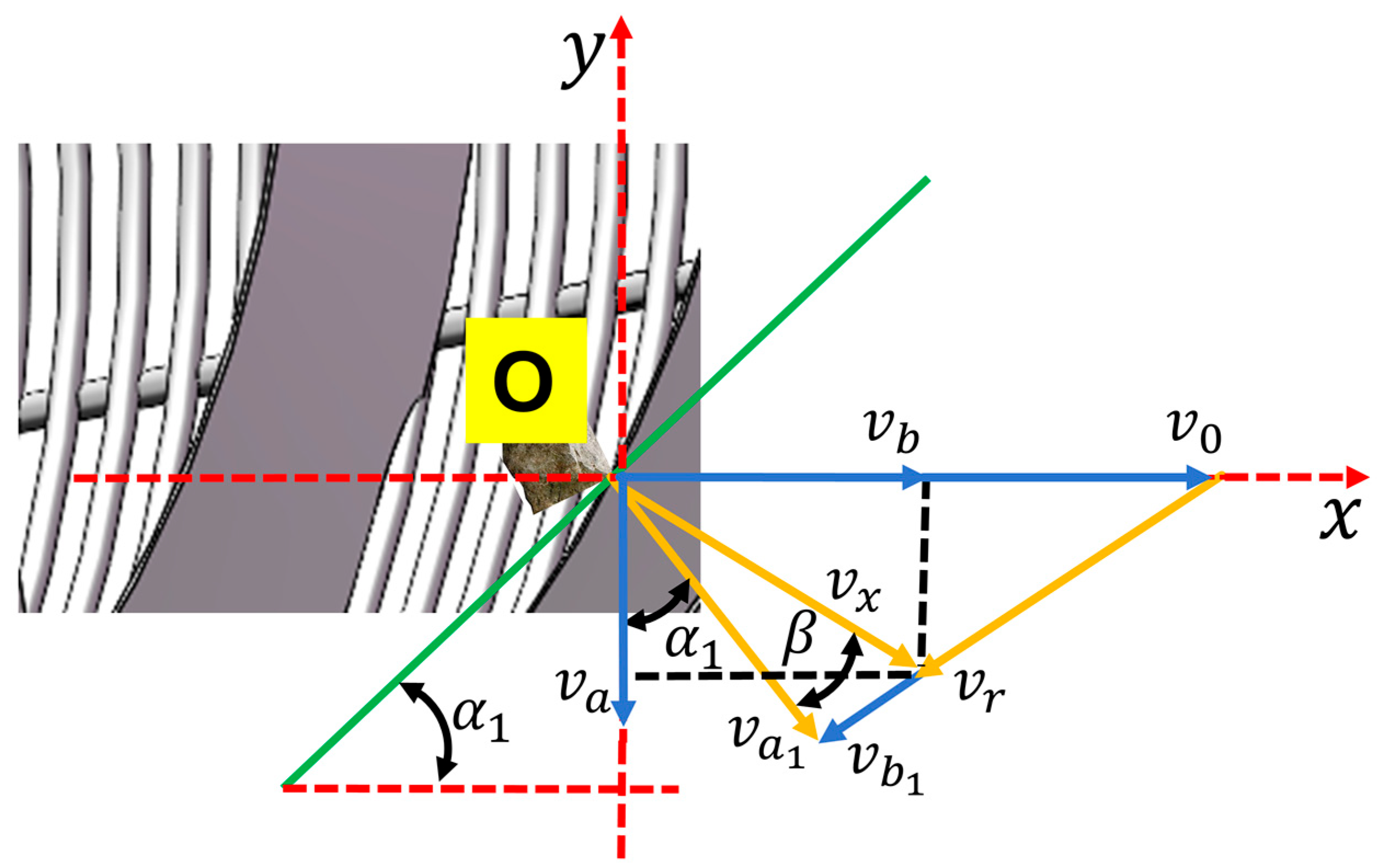
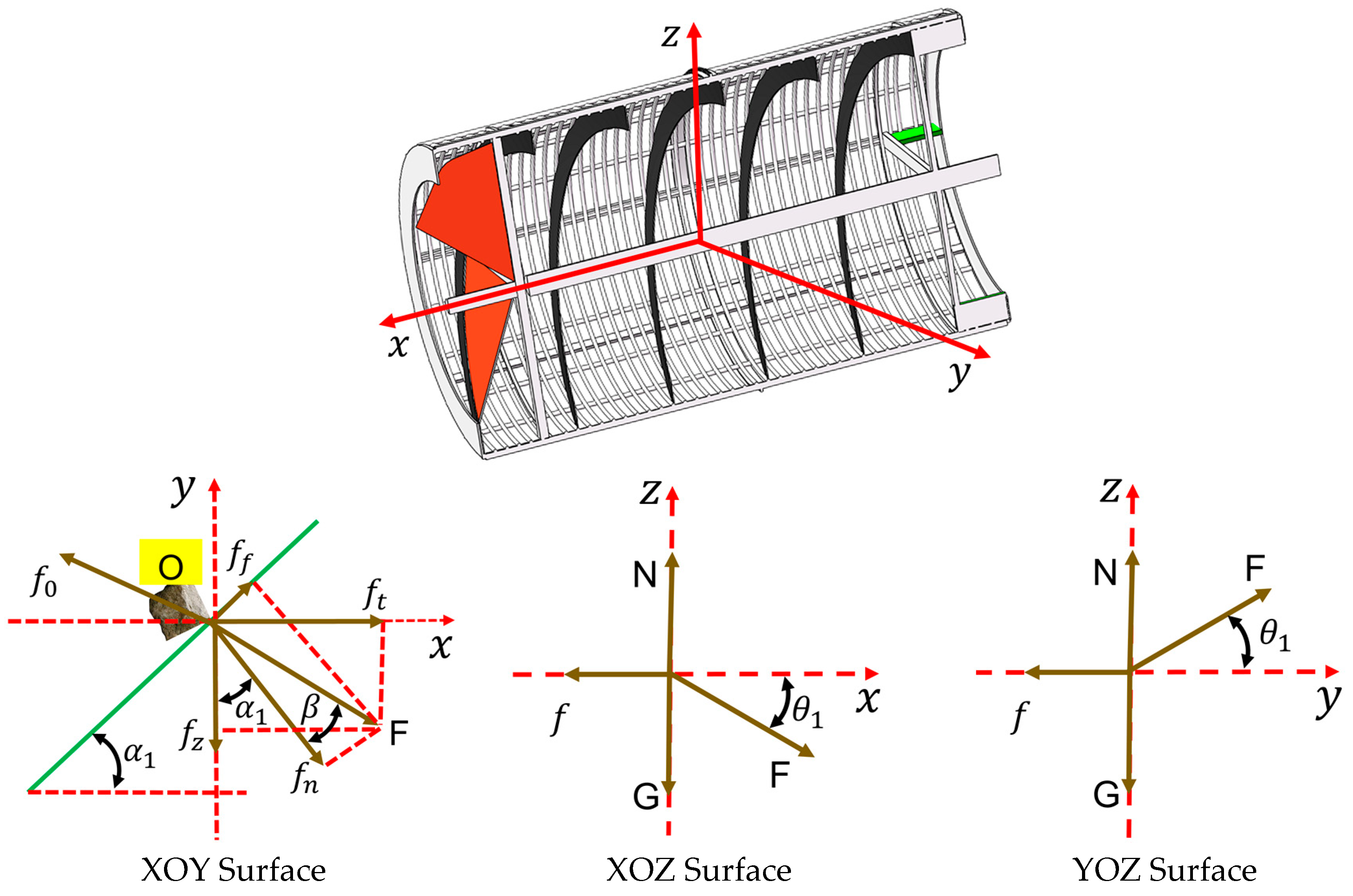
2.4.5. Analysis of Conveying and Separation Performance of Drum Screen
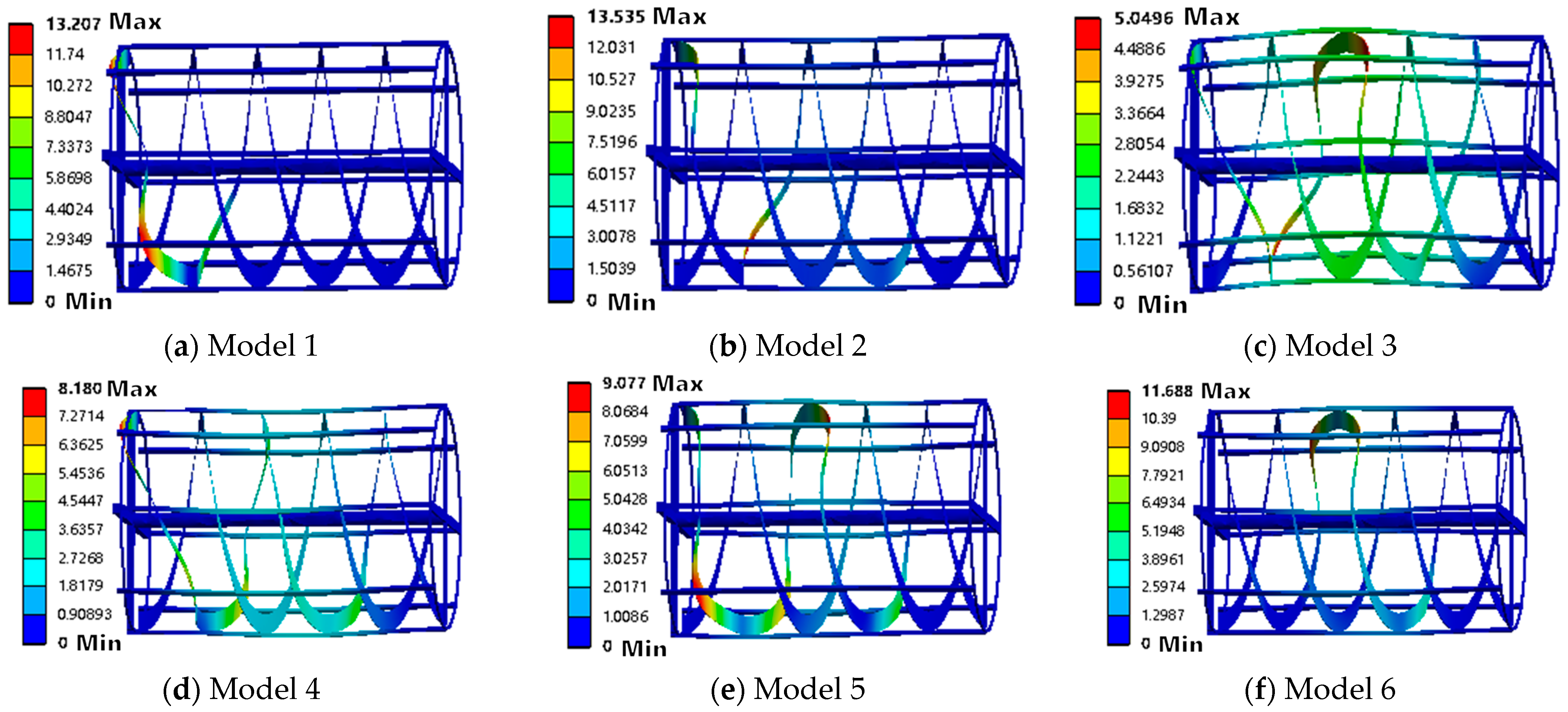
2.5. Modal Analysis of Helical Blades
3. Results
3.1. Test Methods
3.2. Test Indicators
3.3. Test Results
3.4. Difference Analysis
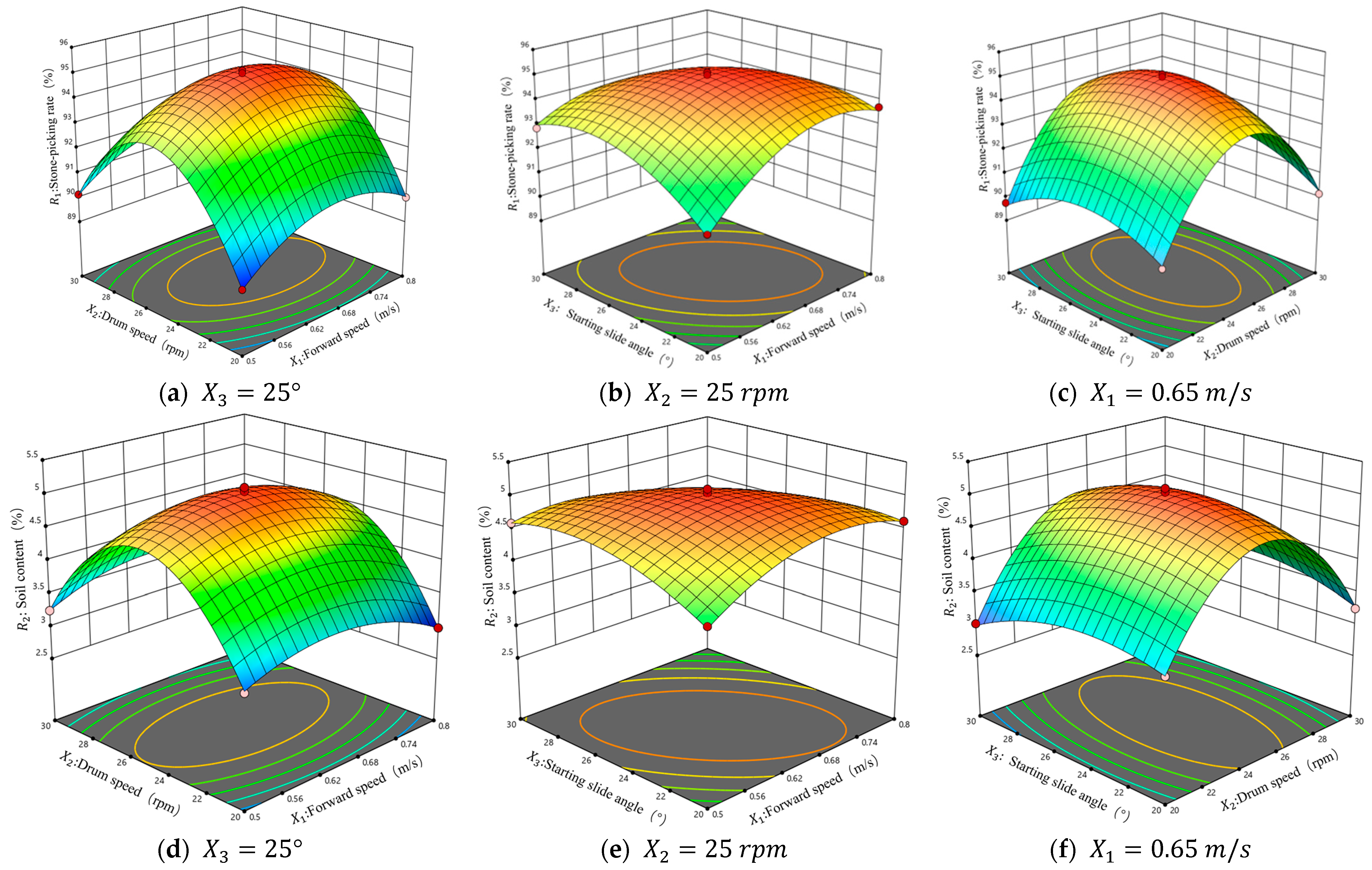
3.5. Response Surface Analysis of Stone Pick-Up Rate and Soil Content
3.6. Parameter Optimization and Field Trial Verification
4. Discussion
5. Conclusions
- (1)
- Aimed at solving the problems of low picking rate and high soil content in the existing stone pickers, a drum stone picker based on the Archimedean curve was designed. The stone picker drum screen, spiral blades, and excavation blades were designed, the movement of stones on the spiral blades was analyzed, the parameter values and dimensions of key working parts were determined, and the reliability of the spiral blades was checked using ANSYS Workbench software.
- (2)
- Through the preliminary performance test of the stone picker, the forward speed of the stone picker, the rotation speed of the drum, and the starting sliding angle of the spiral blade were determined as the test influencing factors, and the picking rate and soil content of the stone picker were determined as the test indicators. A three-factor and three-level response surface test was carried out in the Design-Expert13.0 software, which was divided into 17 groups of experiments. The regression model of the picking rate and soil content of the stone picker were obtained through multivariate fitting. The test results were analyzed and the influence of the interaction between the experimental factors on the picking rate and soil content of the stone picker was obtained.
- (3)
- The response surface optimization of the influencing parameters of the drum stone picker was carried out. When the forward speed of the drum stone picker was 0.726 m/s, the drum speed was 30 rpm, the initial sliding angle of the spiral blade was 26.214°, the picking rate of the stone picker was 91.458%, and the soil content was 3.513%. Field verification tests were carried out using the optimized parameter approximations. The drum stone picker had a picking rate of 91.42%, with an error of 0.038% compared with the predicted value, and a soil content of 3.567%, with an error of 0.054% compared with the predicted value. The results show the feasibility of the overall structure scheme and the accuracy of the optimal parameter combination scheme.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Yu, Y.Z.; Gao, L.X.; Ma, X.L.; Ma, F.; Zhao, J.S. Research progress of soil stone picker. J. Agric. Eng. 2007, 23, 274–279. [Google Scholar]
- Chen, W.; Zhu, J.P.; Chen, S.B.; Yuan, D.; Yao, K.H.; Peng, Z.M. Current status of agricultural mechanization development in sloping cultivated land in China. Agric. Mech. Res. 2017, 39, 1–5, 11. [Google Scholar]
- Zhang, J.; Wang, H.; Li, C.J.; Zhang, J.X.; Du, Y.K. Analysis of the development trend of mechanization technology for soil stone picking in farmland based on patent measurement. Chin. J. Agric. Mech. Chem. 2024, 45, 250–256. [Google Scholar]
- Li, X.; Salem, A.; Liu, Y.; Sun, B.; Shi, G.; He, X.; Wang, D.; Chang, Z. Design and Experiment of a Dual-Disc Potato Pickup and Harvesting Device. AgriEngineering 2025, 7, 148. [Google Scholar] [CrossRef]
- Li, Y.; Hu, Z.; Gu, F.; Wang, B.; Fan, J.; Yang, H.; Wu, F. DEM-MBD Coupling Simulation and Analysis of the Working Process of Soil and Tuber Separation of a Potato Combine Harvester. Agronomy 2022, 12, 1734. [Google Scholar] [CrossRef]
- Zhan, X.M.; Nie, H.L.; Li, Y.L.; Cao, Z.H.; Yang, H.; Cui, J.B. Research on the whole mechanization operation system of oilseed rape production in the area of suitable mechanization improvement. Chin. J. Agric. Mech. Chem. 2019, 40, 197–203. [Google Scholar]
- Cao, S.; Xie, J.; Wang, H.; Yang, Y.; Zhang, Y.; Zhou, J.; Wu, S. Design and Operating Parameters Optimization of the Hook-and-Tooth Chain Rail Type Residual Film Picking Device. Agriculture 2022, 12, 1717. [Google Scholar] [CrossRef]
- Fang, W.; Wang, X.; Han, D.; Ohiemi, I.E. Analysis of the Resistance to Teeth During the Picking Process Based on DEM-MBD Coupling Simulation. Agronomy 2025, 15, 1002. [Google Scholar] [CrossRef]
- Hu, S.; Xin, J.; Zhang, D.; Xing, G. Research on the Design Method of Camellia Oleifera Fruit Picking Machine. Appl. Sci. 2024, 14, 8537. [Google Scholar] [CrossRef]
- Li, S.Q.; Liu, X.G.; Li, D.L. Stress dynamic modeling and simulation of farmland stone picker based on kinetic analysis. South. Agric. Mach. 2024, 55, 24–27. [Google Scholar]
- Zhang, J.; Du, Y.K.; Ma, X.W.; Ma, S.T.; Xiao, P.; Zhang, J.X. Design and test of Archimedean curve based spiral toothed stone picker. J. Agric. Mach. 2025, 56, 290–300. [Google Scholar]
- Zhan, X.M.; Li, Y.L.; Cao, Z.H.; Yang, Q.H.; Cui, J.B. Design of 1JS-100 soil stone picker. Agric. Mech. Res. 2023, 45, 69–73. [Google Scholar]
- Niu, C.; Xing, Y.T.; Yan, C.C.; Tan, H.C.; Ma, S.; Xu, L.M. Simulation and test of shovel-screen type farmland stone pickup and collection machine. J. China Agric. Univ. 2022, 27, 221–233. [Google Scholar]
- Jiang, T.; Li, H.T.; Huang, M.H.; Zhang, M.; Jin, M.; Guan, Z.H. Design and test of spiral staggered row threshing drum for combine harvester. J. Agric. Mach. 2025, 56, 314–324. [Google Scholar]
- Chen, P.L.; Su, J.H.; Xu, J.; Liu, M.H. Design and experiment of vertical spiral ditch fertilizer applicator for hilly orchard. J. Agric. Mach. 2024, 55, 223–233, 274. [Google Scholar]
- Chen, Y.; Xing, R.; Liu, X.; Zhang, H.; Li, H. Design and Test of Potato Seedling Killing and Residual Film Recycling Integrated Machine. Agronomy 2024, 14, 2269. [Google Scholar] [CrossRef]
- Zhu, H.B.; Wu, X.; Bai, L.Z.; Wang, M.P.; Lei, F.L.; Fang, Y. Design and test of a shaftless spiral fertilizer discharge and delivery device for no-till planter. J. Agric. Mach. 2023, 54, 125–134. [Google Scholar]
- Ding, W.M.; Peng, S.Z. Study on the slip angle of rotary plow knives and the slip angle equation. J. Agric. Eng. 1995, 11, 67–72. [Google Scholar]
- China Academy of Agricultural Mechanization. Agricultural Machinery Design Manual; China Agricultural Science and Technology Press: Beijing, China, 2007. [Google Scholar]
- Chen, Q.; Zhang, S.; Hu, G.; Zhou, J.; Zhao, J.; Chen, Y.; Chen, J.; Gao, S.; Chen, Y.; Shi, T. Parameter Optimization of the Harvest Method in the Standardized Hedge Cultivation Mode of Lycium barbarum Using Response Surface Methodology. Horticulturae 2022, 8, 308. [Google Scholar] [CrossRef]
- Liao, Q.X.; Xie, H.M.; Zhang, Q.S.; Zhang, J.Q.; Ao, Q.; Wang, L. Design and test of a combined tillage machine with a disk plow and double-edged rotary cutter. J. Agric. Mach. 2023, 54, 99–110, 195. [Google Scholar]
- Yuan, Y.S.; Lv, D.S.; Wang, Z.H.; Li, H.Q.; Ma, Z.L. Spatial variability of soil salinity and its influencing factors in Shihezi reclamation area, Xinjiang. J. Shihezi Univ. (Nat. Sci. Ed.) 2025, 43, 92–101. [Google Scholar]
- Yuan, J.C.; Yang, J.; Wan, X.Y.; Liao, Y.T.; Liao, Q.X. Design and test of drum sieve type re-cleaning device for rape combine harvester. J. Agric. Mach. 2022, 53, 99–108. [Google Scholar]
- Liu, H.X.; Zhao, Y.J.; Xie, Y.T.; Zhang, Y.M.; Shang, J.J. Design and test of spiral blade assisted roller for organic fertilizer side throwing device. J. Agric. Mach. 2023, 54, 107–119. [Google Scholar]
- Liu, J.; Zhao, G.; Liu, S.; Liu, Y.; Yang, H.; Sun, J.; Yan, Y.; Fan, G.; Wang, J.; Zhang, H. New Progress in Intelligent Picking: Online Detection of Apple Maturity and Fruit Diameter Based on Machine Vision. Agronomy 2024, 14, 721. [Google Scholar] [CrossRef]
- Yin, Z.J.; Sun, J.; Chen, B.; Zhang, L.W. Analysis and parameter design of open type screw conveyor. Min. Mach. 2010, 38, 66–71. [Google Scholar]
- Yao, L.; Liao, Q.X.; Wang, L.; Liu, H.; Wei, G.L.; Wang, B.S. Design and experiment of spiral seed supply device for rapeseed rotary disc high-speed seed collector. J. Agric. Mach. 2022, 53, 78–88. [Google Scholar]
- Wang, F.; Dai, F.; Zhang, F.; Song, X.; Shi, R.; Zhao, W.; Ma, H. Simulation Analysis and Test on the Effect of Picking Up the Residual Film of Typical Film Lifting Parts. Agronomy 2023, 13, 488. [Google Scholar] [CrossRef]
- Pascuzzi, S.; Santoro, F. Analysis of the Almond Harvesting and Hulling Mechanization Process: A Case Study. Agriculture 2017, 7, 100. [Google Scholar] [CrossRef]
- Liu, C.; Wu, F.; Gu, F.; Cao, M.; Yang, H.; Shi, L.; Wang, B.; Wang, B. Recent Research Progress on Key Technologies and Equipment for Mechanized Potato Harvesting. Agriculture 2025, 15, 675. [Google Scholar] [CrossRef]
- Liu, C.; Wu, N.; Cheng, G.; Wu, F.; Gu, F.; Shi, L.; Wang, B. Design and Optimization of a Lightweight and Simple Self-Propelled Crawler Potato Combine Harvester. Agronomy 2025, 15, 65. [Google Scholar] [CrossRef]
- Liu, J.; Liu, X.; Jiang, Y.; Zhou, X.; Zhang, L.; Wang, X. Research on the Adaptability of High-Performance Film for Full Recycling to the Curl-Up Film Collecting Method. Agriculture 2022, 12, 1051. [Google Scholar] [CrossRef]
- NY/T3884—2021; Technical specification of quality evaluation for stone collector. Ministry of Agriculture and Rural Affairs: Beijing, China, 2021.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value/Form |
|---|---|
| Overall dimensions (length × width × height)/mm | 4800 × 2200 × 2000 |
| Total weight/kg | 2000 |
| Engine power/kw | 60–120 |
| Travel method | Traction rear suspension |
| Stone gathering method | Conveyor belt loading |
| Working width/mm | ≤1800 |
| Working depth/mm | 150–300 |
| Operating speed/(km/h) | 2–3 |
| Drum screen speed/RPM | 15–35 |
| Spiral Blade | Mode 1 | Mode 2 | Mode 3 | Mode 4 | Mode 5 | Mode 6 |
|---|---|---|---|---|---|---|
| Excitation frequency (Hz) | 23.774 | 25.913 | 26.224 | 28.011 | 30.868 | 31.753 |
| Maximum deformation (mm) | 13.207 | 12.535 | 5.0496 | 8.18 | 9.077 | 11.688 |
| Levels | Factors | ||
|---|---|---|---|
| Forward Speed X1 (m/s) | Drum Speed X2 (rpm) | Spiral Leaflet Origin Sliding Angle X3 (°) | |
| 1 | 0.5 | 20 | 20 |
| 0 | 0.65 | 25 | 25 |
| −1 | 0.8 | 30 | 30 |
| No. | Factors | (%) | (%) | ||
|---|---|---|---|---|---|
| (m/s) | (rpm) | (°) | |||
| 1 | 0.65 | 25 | 25 | 95.10 | 5.04 |
| 2 | 0.65 | 30 | 20 | 90.14 | 3.25 |
| 3 | 0.50 | 25 | 20 | 91.21 | 4.10 |
| 4 | 0.80 | 20 | 25 | 90.01 | 2.98 |
| 5 | 0.65 | 25 | 25 | 94.90 | 4.89 |
| 6 | 0.50 | 25 | 30 | 92.86 | 4.59 |
| 7 | 0.80 | 25 | 20 | 93.71 | 4.62 |
| 8 | 0.65 | 20 | 20 | 89.87 | 3.37 |
| 9 | 0.80 | 30 | 25 | 90.70 | 3.28 |
| 10 | 0.65 | 20 | 30 | 89.75 | 3.01 |
| 11 | 0.80 | 25 | 30 | 91.89 | 3.78 |
| 12 | 0.65 | 25 | 25 | 95.00 | 5.10 |
| 13 | 0.65 | 30 | 30 | 91.00 | 3.40 |
| 14 | 0.50 | 30 | 25 | 90.13 | 3.25 |
| 15 | 0.50 | 20 | 25 | 89.21 | 3.19 |
| 16 | 0.65 | 25 | 25 | 94.57 | 5.00 |
| 17 | 0.65 | 25 | 25 | 95.11 | 5.05 |
| Source | ||||||||
|---|---|---|---|---|---|---|---|---|
| Sum of Squares | Degree of Freedom | F-Value | p-Value | Sum of Squares | Degree of Freedom | F-Value | p-Value | |
| Model | 78.2 | 9 | 199.92 | <0.0001 | 11.02 | 9 | 286.8 | <0.0001 |
| 1.05 | 1 | 24.19 | 0.0017 ** | 0.0276 | 1 | 6.47 | 0.0385 * | |
| 1.22 | 1 | 28.18 | 0.0011 ** | 0.0496 | 1 | 11.62 | 0.0113 * | |
| 0.0406 | 1 | 0.9344 | 0.3659 | 0.0392 | 1 | 9.18 | 0.0191 * | |
| 0.0132 | 1 | 0.3043 | 0.5984 | 0.0144 | 1 | 3.37 | 0.1089 | |
| 3.01 | 1 | 69.26 | <0.0001 ** | 0.4422 | 1 | 103.55 | <0.0001 ** | |
| 0.2401 | 1 | 5.52 | 0.0511 | 0.065 | 1 | 15.23 | 0.0059 ** | |
| 7.65 | 1 | 176.03 | <0.0001 ** | 0.7182 | 1 | 168.17 | <0.0001 ** | |
| 53.83 | 1 | 1238.47 | <0.0001 ** | 8.59 | 1 | 2010.45 | <0.0001 ** | |
| 5.77 | 1 | 132.73 | <0.0001 ** | 0.4599 | 1 | 107.69 | <0.0001 ** | |
| Residual | 0.3042 | 7 | 0.0299 | 7 | ||||
| Lack of Fit | 0.1077 | 3 | 0.7309 | 0.5852 | 0.005 | 3 | 0.2662 | 0.8472 |
| Pure Error | 0.1965 | 4 | 0.0249 | 4 | ||||
| Cor Total | 78.51 | 16 | 11.05 | 16 | ||||
| Items | X1 (m/s) | X2 (rpm) | X3 (°) | R1 (%) | R2 (%) |
|---|---|---|---|---|---|
| Optimization solution | 0.723 | 30 | 26.214 | 91.458 | 3.513 |
| Verification solution | 0.72 | 30 | 26.2 | 91.42 | 3.567 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Wu, F.; Gu, F.; Gu, M.; Ni, J.; Luo, W.; Pei, J.; Cao, M.; Wang, B. Design and Parameter Optimization of Drum Pick-Up Machine Based on Archimedean Curve. Agriculture 2025, 15, 1551. https://doi.org/10.3390/agriculture15141551
Liu C, Wu F, Gu F, Gu M, Ni J, Luo W, Pei J, Cao M, Wang B. Design and Parameter Optimization of Drum Pick-Up Machine Based on Archimedean Curve. Agriculture. 2025; 15(14):1551. https://doi.org/10.3390/agriculture15141551
Chicago/Turabian StyleLiu, Caichao, Feng Wu, Fengwei Gu, Man Gu, Jingzhan Ni, Weiweng Luo, Jiayong Pei, Mingzhu Cao, and Bing Wang. 2025. "Design and Parameter Optimization of Drum Pick-Up Machine Based on Archimedean Curve" Agriculture 15, no. 14: 1551. https://doi.org/10.3390/agriculture15141551
APA StyleLiu, C., Wu, F., Gu, F., Gu, M., Ni, J., Luo, W., Pei, J., Cao, M., & Wang, B. (2025). Design and Parameter Optimization of Drum Pick-Up Machine Based on Archimedean Curve. Agriculture, 15(14), 1551. https://doi.org/10.3390/agriculture15141551