1. Introduction
In natural environments, a tomato (
Lycopersicon esculentum) can be effectively pollinated through insects, such as bumblebees, or wind pollination [
1,
2]. Facility crop cultivation achieves temperature and humidity regulation and maintenance through a closed environment, especially in the cold winter [
3,
4]. The closed facility environment causes a lack of pollination activities from natural pollinators, and the fruit setting rate, yield, and quality of tomato fruits are greatly restricted [
5,
6]. Therefore, the cultivation of facility tomatoes requires a large amount of manually-assisted pollination operations [
7]. The assisted pollination can be mainly divided into chemically-assisted fruit setting, biologically-assisted pollination, and physically-assisted pollination, according to the implementation methods [
8].
Chemically-assisted fruit setting methods increase tomato fruit setting rate by spraying or dipping tomato flowers with chemical agents. Improper concentration or spraying of chemical agents on tender leaves, flower buds, etc., can easily lead to plant damage or abnormal fruit [
9]. In addition, the use of chemical agents may also pose food safety or soil and water pollution problems in facilities [
10,
11], and should be replaced by green pollination methods as soon as possible [
12].
Biologically-assisted pollination refers to the method of assisting the pollination of crops by releasing pollinators such as bumblebees in greenhouses, which is clean and efficient. This is currently widely used in European countries such as the Netherlands and Italy [
13,
14]. Although biological pollination is green and harmless, developing countries lack sufficient facilities and have a significant gap in environmental regulation compared to other developed countries [
15]. Moreover, pesticide application is often required in the cold winter and humid summer, which cannot meet the needs of bee pollination activities and cannot guarantee pollination efficiency [
16].
Physically-assisted pollination refers to the application of vibrations to tomato plants and inflorescence based on the characteristics of tomato bee pollination, which drives flower vibrations to release pollen and promote tomato pollination [
17]. At present, some growers use electronic vibration pollinators to use vibrating components to contact tomato inflorescence stems to drive the shaking of tomato flowers for pollination [
18]. These contact-based physical pollination methods are fast but labor-intensive, ineffective, and prone to plant damage, which cannot meet the pollination needs of facility tomatoes [
9].
For fruit tree or field crop pollination, there have been some studies on pollination under the action of airflow [
19,
20]. Drawing on relevant experience, some studies have also been conducted on the method of facility tomato pollination using airflow blowing or the downwash flow field of an unmanned aerial vehicle (UAV) to drive tomato flower motion [
21]. In addition, when pulsed airflow acts on the inflorescence, it can achieve a mechanical vibration-like effect [
22,
23,
24], allowing tomato flowers to achieve a regular reciprocating motion, which may improve the pollination efficiency of tomatoes [
25].
The pollination method through airflow blowing is gradually being applied to facility tomato cultivation. Some growers use an air blower to directly blow the tomato flowers, causing the tomato inflorescence to shake and release pollen [
26,
27]. Although this method of using an air blower for the assisted pollination of tomatoes has been proven effective, its effectiveness is not ideal, possibly because the airflow parameters are not suitable for tomato pollination or the pollen released is blown away with the high velocity airflow [
28].
Shi Qiang et al. established a simulation model for tomato wind-induced pollination based on the strong spatiotemporal pulsation characteristics of an unmanned aerial vehicle (UAV) downwash flow field. They investigated the effects of parameters such as UAV hovering height and average wind speed in the downwash flow field on tomato pollination and conducted pollination experiments. The results indicate that the UVA’s downwash flow field can effectively pollinate, through wind-induced vibration, tomatoes on both sides simultaneously, improving the pollination rate [
21].
At present, most studies on airflow-assisted pollination technology mainly focus on field crops or fruit trees, and most of them directly use large-scale air blowing to achieve assisted pollination. The determination of airflow parameters is relatively simple and lacks theoretical support. Air blowers or drones with built-in flow fields are often used to directly blow tomatoes for pollination-based airflow. However, there is relatively little research on the pneumatic pollination of facility crops.
To address this issue, Kumar et al. [
29] designed a tomato pollination device based on pulsed airflow. This pollination device is achieved by installing a 3D-printed barrier plate at the outlet of the air blower, which rotates and helps to block and release the airflow outlet to generate pulse airflow. The experimental results showed that the efficiency of the pulse airflow tomato pollination machine was significantly higher than that of the pollination method using an air blower, and the yield improvement was also significantly higher than that of the tomato pollination method using a blower because it has three airflow outlets on each of its left and right rows [
29]. Wu et al. [
30] proposed a pulse airflow bundle tomato pollination method and built a corresponding pollination device. Analyzing its oscillation law under the action of pulse airflow, based on the mathematical model of gas–solid two-phase flow, a CFD-DEM coupled simulation model was established to simulate the tomato flower pollination process. Finally, the optimal parameters for pulse airflow bundled tomato pollination were obtained through experiments [
30].
However, research on pulse airflow in crop pollination is still in the exploratory stage, and there are few relevant reports at present. The device is too large and may not be suitable for the pollination of certain greenhouse tomatoes.
In summary, biologically-assisted pollination is easily affected by facility conditions, especially in the cold winter with inadequate facilities. Chemically-assisted fruit setting is prone to quality decline, which also does not meet the development needs of ecological agriculture. Vibration pollination methods can cause plant damage and spread diseases through contact with crops. Therefore, airflow pollination based on airflow could be a possible clean and non-contact tomato pollination method. While at present the method of using airflow pollination has been proposed, there are few reports on the device design and parameter optimization research using pulse airflow for tomato pollination.
In order to address the aforementioned issues, this study will develop a handheld device for the supplementary pollination of tomatoes in greenhouses. By generating pulsed airflow, the tomato inflorescence vibration is driven to achieve green and harmless pollination of tomatoes. Firstly, based on the pulse airflow pollination needs of tomatoes, the pollination device based on pulse airflow was designed. Then, the pulse airflow velocity, angle, and frequency were determined through orthogonal experiments. Finally, the pollination and fruit setting effects of a pollination device based on pulse airflow were compared and analyzed through tomato pollination experiments.
2. Materials and Methods
In this research, all materials and experimental sites were sourced from Shengdao Agricultural Industrial Park, Taiji Town, Beipiao City, Liaoning Province (E 120.72°, N 41.81°). The tomato variety used in the experiments is L-402 type pink tomato, which is a common tomato variety with middle size fruit in northern China. It is an infinite growth tomato variety, with a plant height of 80 to 100 cm when harvested from three ears, and an opening degree of about 50 cm. The tomato of L-402 variety has about 4 to 6 flowers per inflorescence, with an average flowering period of about 4 days, and usually takes 40 to 50 days from flowering to fruit ripening. After the flowers fully open, there is a lot of pollen within the barrel shaped anthers of stamens, making it easier to achieve self-pollination. However, tomatoes have a poor disease resistance in facilities with large temperature changes in winter, requiring frequent pesticide application operations, which greatly reduces the activity and pollination efficiency of pollinators such as bumblebees. Therefore, the pulse airflow pollination method proposed in this study is suitable for tomato pollination under these conditions.
2.1. Design of Tomato Pollination Device Based on Pulse Airflow
2.1.1. Principle of Tomato Pollination Based on Pulse Airflow
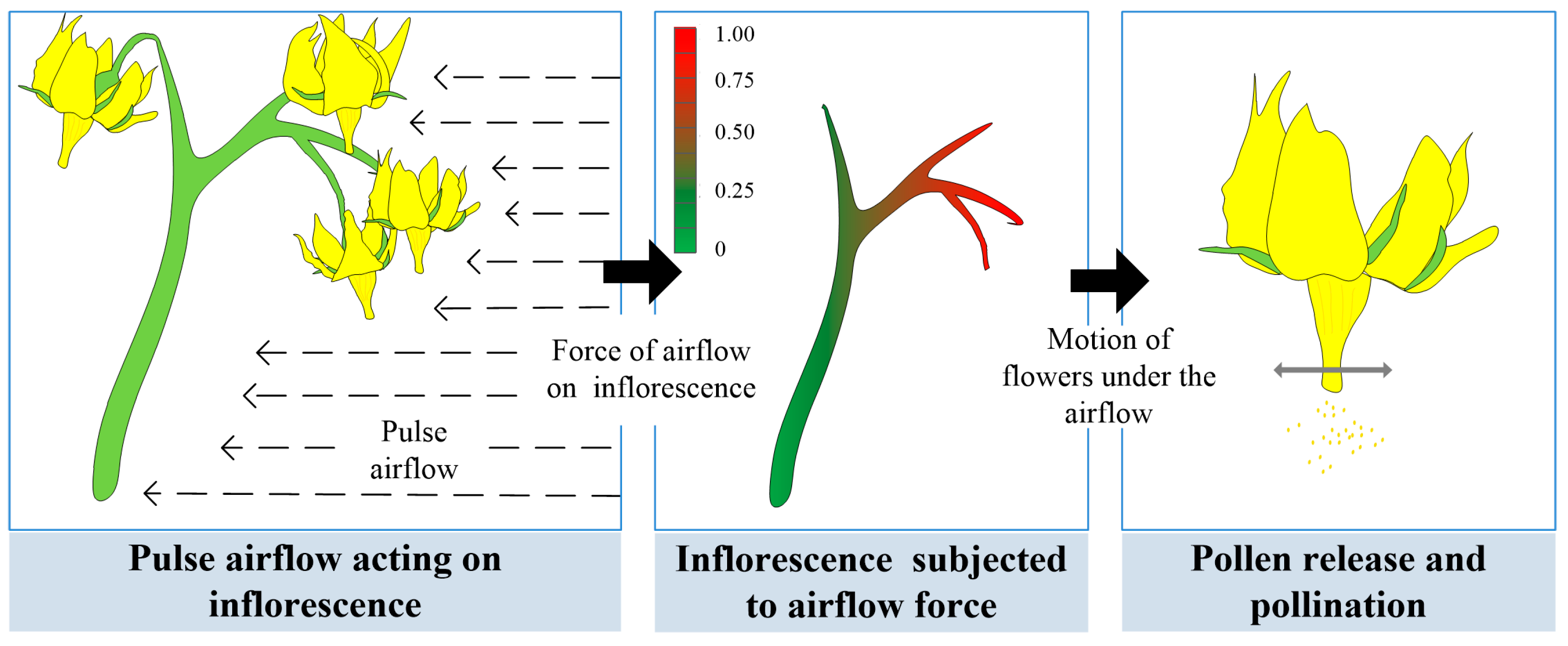
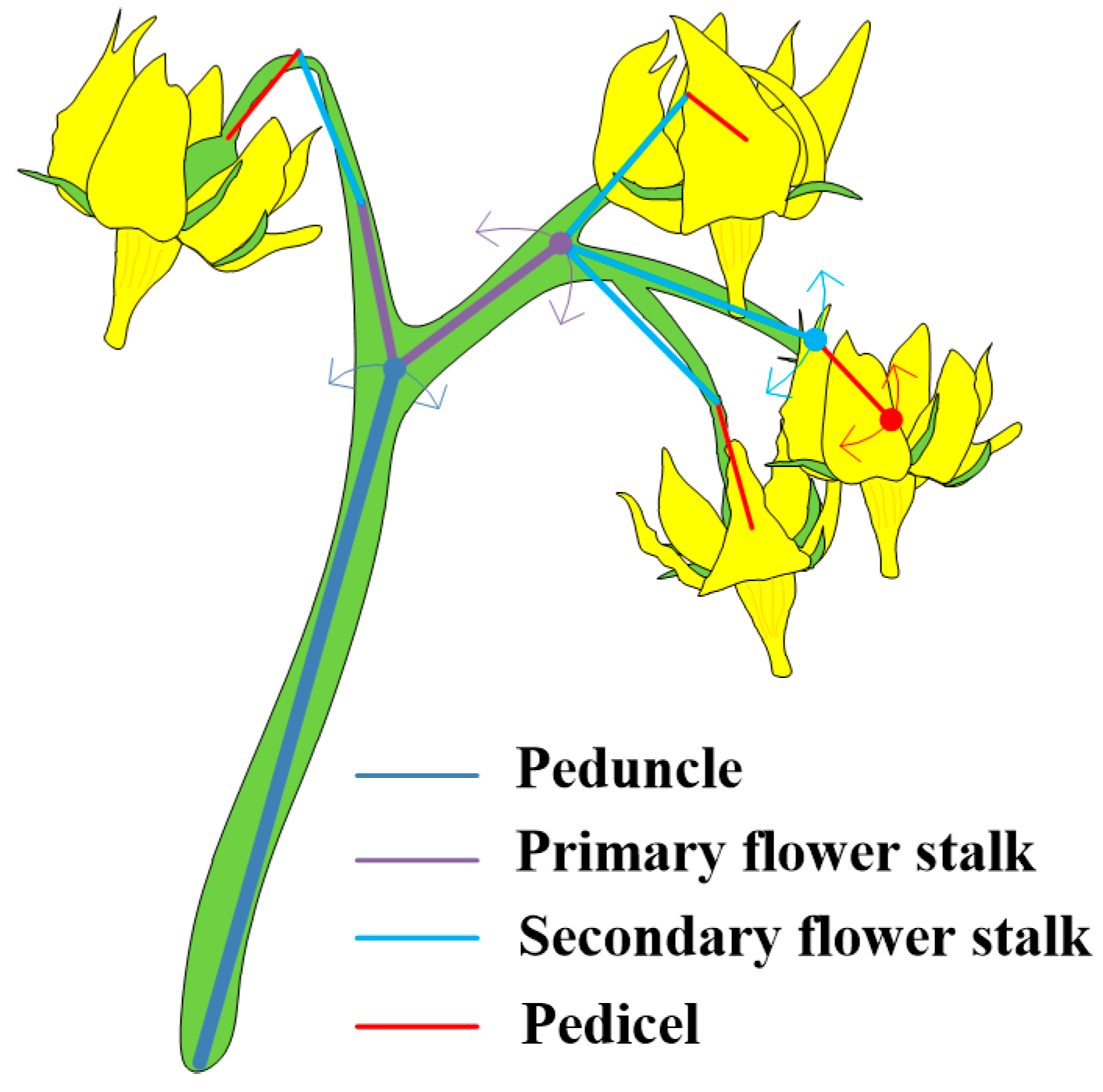
The principle of pulse airflow pollination for tomatoes is shown in
Figure 1. When the pulse airflow acts on the tomato inflorescence, various parts such as flowers and inflorescence stems will be affected by the force of the airflow, resulting in displacement. The displacement generated by various parts will ultimately drive the tomato flowers at the tip of the inflorescence to significant displacement. The motion direction and displacement will rapidly change under changes in force, which results in the reciprocating motion of tomato flowers. This reciprocating motion is similar to the vibration generated by pollinators such as bumblebees when they come into contact with tomato flowers for pollination. The reciprocating motion will cause the tomato anthers to release pollen and complete effective pollination.
2.1.2. Construction of Tomato Pollination Device Based on Pulse Airflow
In order to achieve effective tomato pollination with pulse airflow, an electronic tomato pollination device was designed. It can generate pulsed airflow to achieve non-contact tomato pollination, as shown in
Figure 2, which has a size of 250 mm × 150 mm × 100 mm, and a weight of 1.5 kg. It has the advantages of a simple structure and compactness, which make it suitable for non-contact pollination operations of facility tomatoes.
The designed pollination device based on pulse airflow is mainly powered by a 12V lithium battery, which drives the air pump with a rated power of 42 W, a maximum flow rate of 40 L·min−1, and an outlet diameter of 6 mm. It should be noted that a ASL-6 pressure regulating valve (Shannais Automation (Ningbo) Group TWSNS, Ningbo, China) is installed at the outlet of the pump to ensure stable and adjustable airflow velocity. The pulse airflow was emitted through a PWM (Pulse Width Modulation) type signal of the micro-controller. In order to ensure the uniformity of the airflow force on the tomato flowers, we adjusted the duty cycle of the PWM signal to 50%. Therefore, the opening and closing times of the valve were consistent. The micro-controller generates a frequency-adjustable PWM wave signal, which drives the pulse valve through a high-frequency relay. Driven by these signals, it is possible to result in a pulse airflow with regular on–off patterns at the airflow outlet.
The key components of the designed pulse airflow tomato pollinator based on pulse airflow and their main parameters are shown in
Table 1.
In order to observe and analyze the motion characteristics of tomato flowers under pulsed airflow pollination, a high-speed photography system, as shown in
Figure 3A, was built. The high-speed photography system (Photron PhotoCam Speeder v2, Photron Limited, Yonezawa City, Japan) can capture continuous motion process images of tomato flowers under the action of pulsed airflow at a speed of 2000 fps.
Figure 3B shows the position (white points) and displacement comparison (red lines) of tomato flowers at different times under the action of pulsed airflow at the same time interval (250 ms). It can be seen that tomato flowers have different displacements under the action of pulsed airflow. Subsequently, their movement trajectory and characteristics can be analyzed based on their coordinates to further analyze the movement pattern of tomato flowers under the action of pulsed airflow and their relationship with pollination.
2.2. Determination and Optimization of Pulse Airflow Pollination Parameters
According to the principle of tomato pollination based on pulse airflow, it can be inferred that different pulse airflows acting on the tomato inflorescence will cause different motions of the flower, resulting in different pollination effects. Therefore, in order to optimize the pollination and fruit setting effects of pulse airflow on tomato pollination, a study was conducted to determine the pulse airflow parameter influence rules for tomato pollination, and to determine the optimal parameter combination through an orthogonal test.
2.2.1. Determination of Key Parameters for Pulse Airflow Pollination
When the pulse airflow acts on the tomato inflorescence, if the airflow velocity is too slow, it is difficult to drive the tomato inflorescence and tomato flower to realize effective reciprocating motion and pollination. If the airflow velocity is too fast, the force generated on the flowers may be too large, making it difficult for the tomato flowers to achieve reciprocating motion, and even blowing the inflorescence structure, making it impossible to achieve effective pollination.
For buzz pollination plants, the motion direction of the anther has an influence on the release of pollen [
31]. Therefore, the direction of airflow is also an important factor that directly affects the tomato flower’s motion. In this study, the airflow angle is defined as the angle between the horizontal plane and the airflow direction. When the airflow direction is parallel to the horizontal plane, that means the airflow angle is 0°. If the airflow direction is inclined upward from the horizontal plane, the angle is a positive value; otherwise, it is a negative value.
In addition, the frequency of the pulse airflow is also very important for the motion of tomato flowers, because at a faster frequency, tomato flowers may not be able to produce significant displacement, and if the frequency is too low, it may not be able to cause the tomato inflorescence to produce regular motion and release pollen.
A single-factor experiment was conducted to compare and analyze the motion characteristics of flowers, and feasible ranges for each parameter were obtained. When the airflow velocity is less than 0.5 m·s−1, the airflow force on tomato flowers is too small to produce effective vibration. When the airflow velocity is greater than 1.5 m·s−1, the flowers are blown too heavily to return, resulting in vibration. When the airflow angle is less than −30° or greater than 30°, the tomato flowers are blown over, unable to form stable vibrations. Furthermore, when the frequency of the pulse airflow is below 10 Hz, the reciprocating motion amplitude of tomato flowers is large, but the vibration effect produced is not significant. When the frequency is higher than 50 Hz, the rapid change in airflow causes the movement direction of tomato flowers to change too quickly and unevenly.
Through single-factor experiments, it can be concluded that the airflow velocity between 0.5 to 1.5 m·s−1, the airflow angle between −30° to 30°, and the airflow pulse frequency between 10 to 50 Hz were suitable parameter ranges to achieve tomato pollination with non-contact pulse airflow. Based on these pulse airflow parameter ranges, the optimal parameter selection can be made according to the actual pollination effect.
2.2.2. Evaluation of Pollination Effect of Pulse Airflow Pollination
Under the effect of pulsed airflow, tomato pollen is released from the anthers’ holes. Due to the proximity of the anther holes to the stigma, the pollen will easily adhere to the sticky stigma during its release process. Thus, the pollen tube elongates until the egg cell completes fertilization, achieving effective pollination, ensuring fruit setting, increasing the number of seeds in the fruit and, thus, improving the taste and weight and quality of the fruit. In theory, the more pollen particles are deposited on the stigma, the higher the possibility of effective pollination [
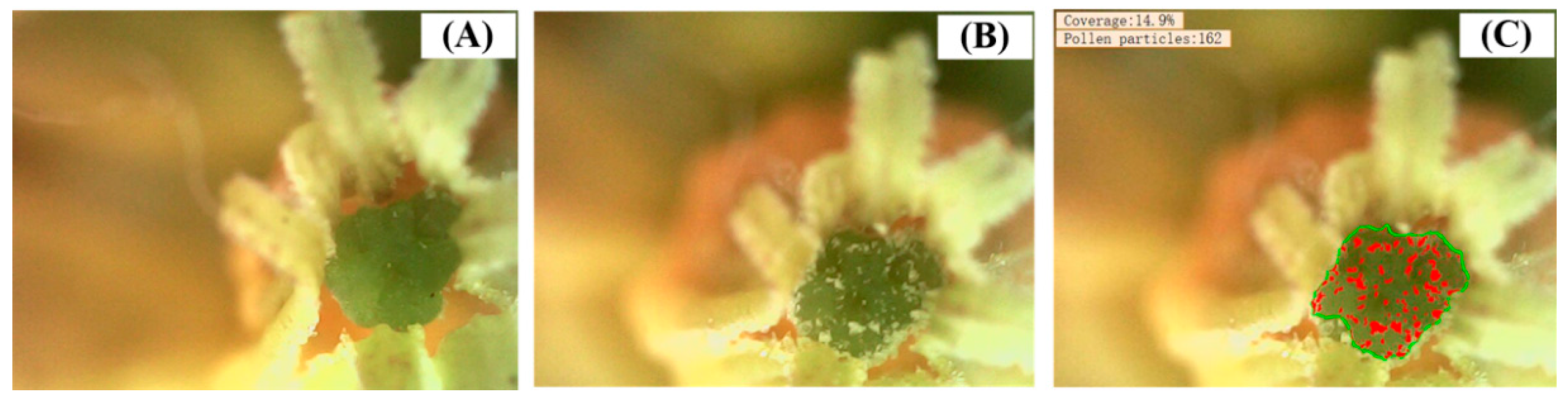
32]. Therefore, in order to quickly and intuitively observe and analyze the pollination effect of tomatoes, an image processing-based algorithm for pollen coverage on tomato stigma recognition was designed, which can help to intuitively evaluate the pollination results of tomatoes after pulse airflow pollination.
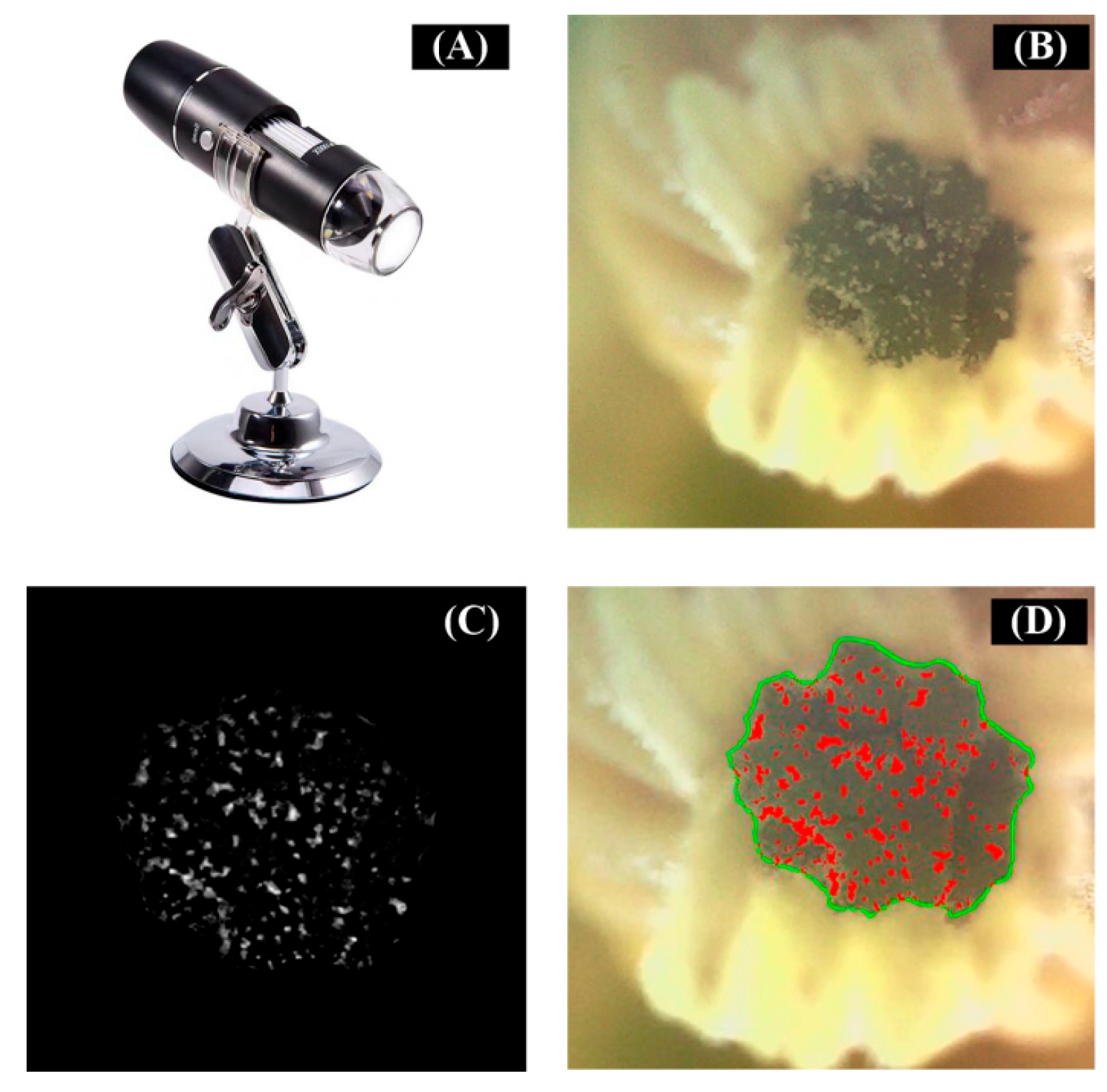
Firstly, an electronic micro-camera with the model of SHH-303 (Guangdong Shangshihua Technology Co., Ltd., Guangzhou, China) is used to directly face the tomato flower stigma, as shown in
Figure 4A. The magnification is set to 200 times to capture images of tomato stigma, as shown in
Figure 4B. Then, the color image was decomposed into red, green, and blue channels, and a mask with a size of 59 × 59 pixels was selected for image dynamic enhancement based on differential mean filtering using the red channel image [
33]. The contrast between the stigma region and the pollen particle regions was significantly enhanced, as shown in
Figure 4C. Finally, after binary processing, the pollen particle area
A1 on the tomato stigma and the entire stigma area
A2 were obtained, resulting in the tomato pollen stigma coverage
Cp, as shown in
Figure 4D and Formula (1).
To verify the accuracy of the proposed pollen deposition coverage image processing algorithm, the number of pollen patches obtained from image processing of 20 tomato stigma images was compared with the results of manual counting. Among them, a total of 4352 pollen patches were identified by manual counting, and 189 pollen patches were not correctly identified (including over-identification and under-identification) using image processing algorithms. The relative error between the pollen deposition targets identified using image processing algorithms and the manual counting results was 4.34%, which can meet the needs of evaluating tomato pollen deposition and pollination effects.
2.2.3. Orthogonal Test of Pulse Airflow Parameters Influence on Pollination Effect
An orthogonal test has the advantages of fewer test times, a simple method, and high efficiency, which has a wide range of applications in agricultural technology research and development [
32]. Considering the test demand of this study, the orthogonal rotation test design method was selected to develop the test plan. In this study, three factors and three levels of an orthogonal test scheme were selected based on the test design principle of an orthogonal test to analyze the influence of airflow parameters on the pollination effect in this study. The test is carried out using the pollination device based on pulse airflow established in
Section 2.1. The factor levels of the test selected are based on a single factor test result, which is shown in
Table 2.
There were a total of 17 tests carried out according to the orthogonal rotation combination test design scheme with the Design Expert 12.0 professional analysis software. Although this experimental protocol has taken into account the impact of data reproducibility on the results, this study still conducted three replicates of each experiment and took the average to improve the accuracy of the study. However, it can still be seen that in different experimental groups with the same parameters (such as 2, 3, 5, etc.), the final experimental results were not completely the same, but this does not affect the analysis of the results.
This was according to the identification method of pollen coverage on stigma, as shown in
Figure 4. We took the pollen coverage on the stigma, recognized via the image processing algorithm proposed in
Section 2.2.2, as the effective pollination amount; the statistics of pollen coverage on the stigma under the combination of various factor levels are shown in
Table 3.
The corrected determination coefficient R
2 in the regression model is 0.9345, indicating that the model has only 6.55% variation, which indicates that the regression model has been well fitted. The response function
P of the effective pollination amount of tomatoes guided by airflow is used to establish a regression mathematical model with the actual values of each influencing factor as the independent variable, and the secondary response surface regression analysis is carried out. The multiple secondary response surface regression model is obtained via regression fitting the test data.
where
P is pollen coverage on stigma,
v is airflow velocity,
a is airflow angle, and
f is airflow pulse frequency.
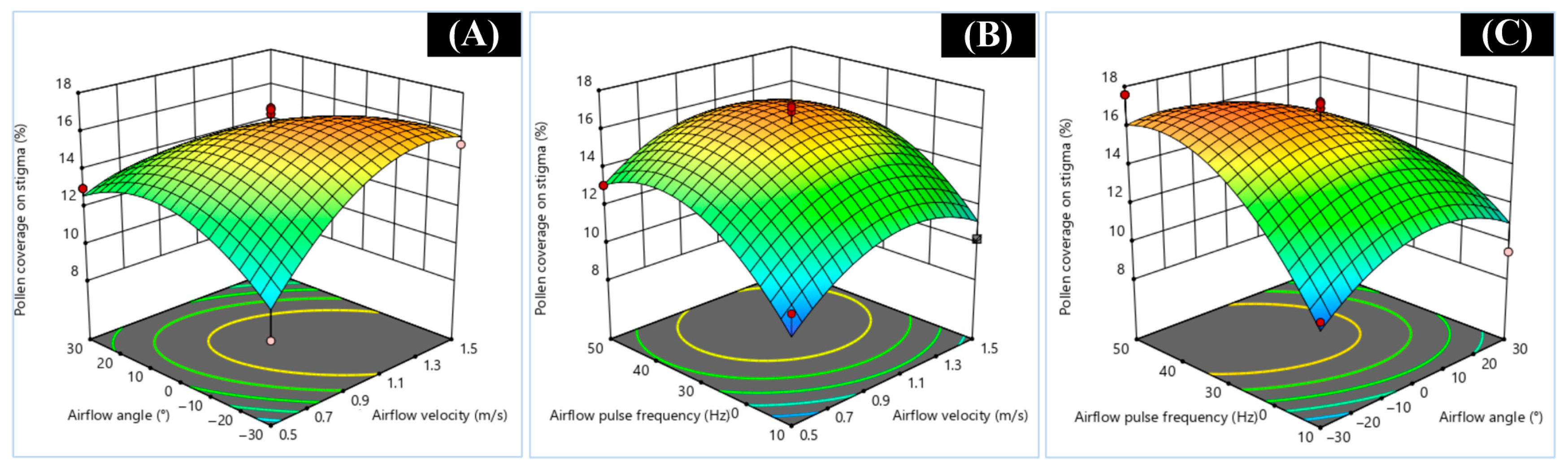
In order to further study the influence of airflow parameters on pollen coverage on the stigma, the test data were further processed to obtain the response surface of the interaction of each of the two factors, as shown in
Figure 5. All three of these response surface curves show the opening downward trend; that is, with the increase in factor level, the effective pollination amount shows a trend of first increasing and then decreasing. The contour lines of these interaction surface curves were oval, indicating that there is an obvious interaction between each of the two factors.
Through comparative analysis of response surface curves, it can be concluded that a higher effective pollination amount is acquired when the airflow velocity is between 1.0 to 1.3 m·s−1, the airflow angle is between −25 to 0°, and the airflow frequency is between 20 to 40 Hz. Through optimization analysis within the above ranges, it was found that the optimal pollination effect can achieve a stigma coverage rate of 17.17% at an airflow velocity of 1.22 m/s, an airflow angle of −19.69° and a pulse frequency of 25.64 Hz.
2.3. Evaluation Methods of Fruit Setting Effect for Tomato
2.3.1. Experimental Conditions and Plans
The tomato planting facility used in this study is currently one of the most advanced solar greenhouses, at Chaoyang City, Liaoning Province, China (E 120.71, N 41.81), measuring 100 m in length and 7.5 m in width, and planted using a large ridge double row dense planting method. The plant spacing for tomato cultivation is 80 mm, and the row spacing is 150 mm. The tomato crops used in the experiment were planted in September 2023, and the pollination experiment was conducted between February and March 2024. The experimental targets were the second inflorescence of each tomato plant.
During the experiment, the tomato crops were divided into four groups based on the method of assisted pollination and fruit setting, which were the control group, chemically-assisted fruit setting group, vibration pollination group, and pulse airflow pollination group. In order to avoid the impact of inconsistent temperature, humidity, and their changes in the greenhouse head and tail areas on the experimental results, a 40 m long area in the middle of the greenhouse was selected as the experimental area. This experimental area was divided into four groups, with each different assisted pollination and fruit setting method group corresponding to a 10 m long area.
The first group is the control group used to compare the effects of various assisted pollination and fruit setting methods, and this group of tomatoes is not treated with any assisted pollination or fruit setting methods.
The second group is the chemical agent spraying group, which sprays chemical hormones twice a week based on greenhouse humidity to promote tomato ovary enlargement and achieve assisted fruit setting, as shown in
Figure 6A.
The third group is the vibration pollination group, which uses a specialized electric vibrating pollinator (CS-88, Guangzhou Lvbang Landscape Machinery Co., Ltd., Shenzhen, China) to achieve supplementary pollination for tomatoes. When the electric vibrating pollinator is working, the vibration rod will contact the inflorescence, driving the tomato flowers to shake and achieve assisted fruit setting, as shown in
Figure 6B.
The fourth group is the pulse airflow pollination group, which uses the tomato pulse airflow pollination device constructed in this study for assisted pollination. Due to the handheld operation of the pulse airflow pollination device designed, it can ensure that the distance between the airflow outlet and the inflorescence is between 200 and 300 mm. By adjusting the output flow rate of the air pump, the airflow velocity reaching the tomato inflorescence can be ensured to be 1.2 m·s
−1 to 1.25 m·s
−1. In addition, due to limitations in installation accuracy, the angle between the airflow outlet and the horizontal plane is −20°, and the pulse airflow frequency is 25 Hz, as shown in
Figure 6C. Additionally, due to the fixed installation angle of the airflow outlet, it is only necessary to keep the center of the airflow outlet aligned with the tomato inflorescence during pollination operation. During the pulse airflow pollination operation, the pollination time for each inflorescence is 2 s, which is similar to the pollination time of bumblebees. Additionally, it has been verified that after 2 s, the pollen coverage on the stigma will hardly increase.
When performing different pollination operations, the pollination operations of vibration pollination and pulse airflow pollination were both carried out every 3 to 5 days on sunny mornings from 9 a.m. to 11 a.m. The temperature range in the experiment is from 20 °C to 28 °C, with an average light intensity of about 20 kLux and an average relative humidity of about 70% to 80%. This is because, only under such conditions, tomato pollen particles will be more easily released under vibration [
27].
Except for pollination, all other management processes in each group were consistent, and efforts should be made to avoid movement or vibration of tomato plants in other management operations to avoid any impact on tomato fruit setting.
2.3.2. Evaluation Method of Fruit Setting Effect
The fruit setting effect not only includes the number and yield of fruits produced after assisted pollination and fruit setting operations, but also requires a more comprehensive analysis of the fruit setting situation and the condition of the fruits. Therefore, this study divides the evaluation of fruit setting effects into two parts, which are fruit setting effect analysis and fruit quality analysis, as follows:
- (1)
Fruit setting effect evaluation
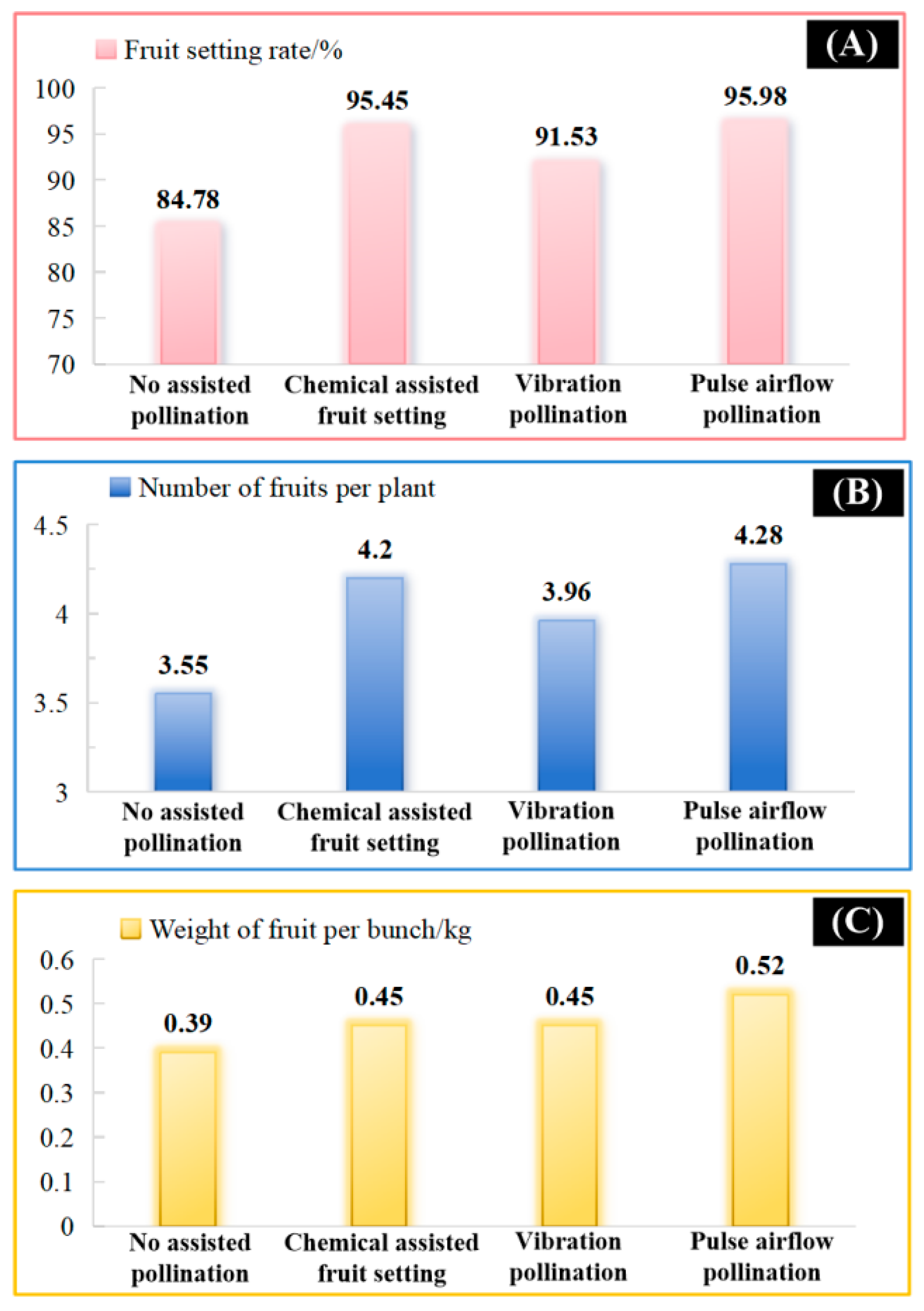
In this study, the fruit setting rate, number of fruits per plant and weight of fruit per bunch were selected as parameters for evaluating the fruit setting effect. In the experiment, 100 tomato inflorescences were randomly selected from each group, and the above three parameters were statistically analyzed. The average value was taken as the final fruit setting effect result. The fruit setting rate could be calculated using Formula (3).
where
Rf is the fruit setting rate,
F1 is the total number of flowers, and
F2 is the total number of fruits produced.
- (2)
Fruit quality evaluation
The weight per fruit, fruit shape, and seed numbers per fruit were taken as the evaluation parameters for fruit quality evaluation. We randomly selected 10 mature tomatoes from each group, weighed each tomato using an electronic scale with an accuracy of 0.1 g, and calculated the average weight of tomatoes in each group as the weight per fruit of that group.
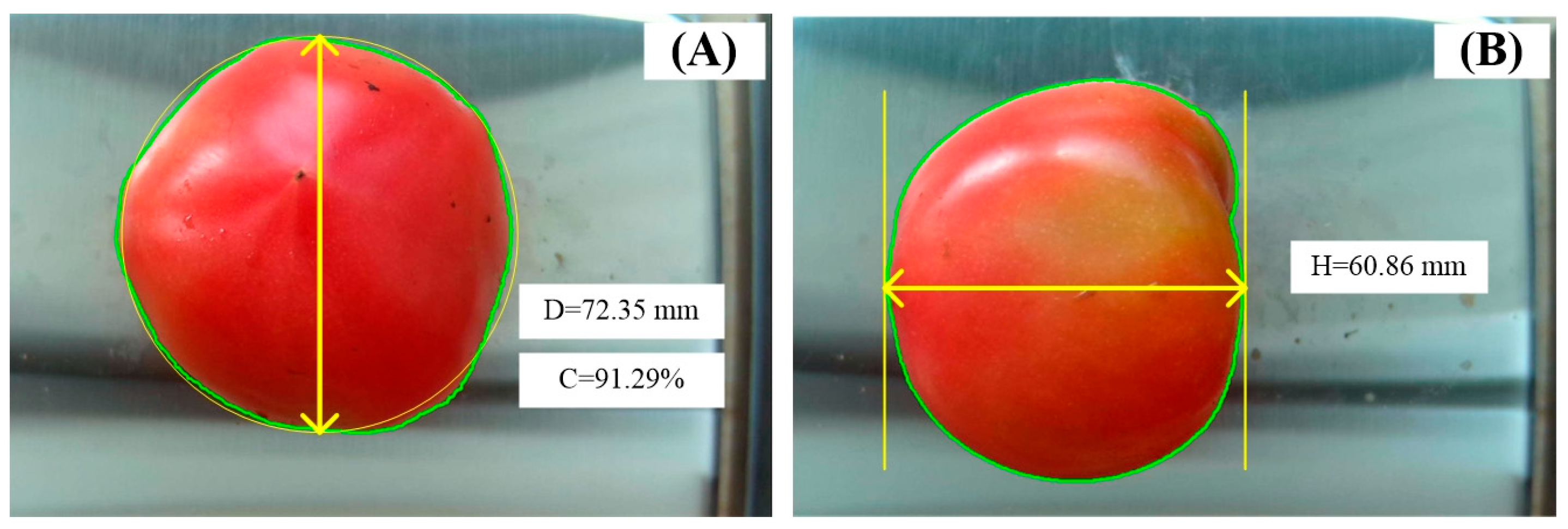
The fruit diameter, height, and shape index of tomatoes can express the quality of tomato shape, which is crucial for the marketability of tomatoes. The tomato shape characteristics recognition algorithm was designed for rapid detection of tomato fruit diameter, height, and shape index, as shown in
Figure 7. Fruit diameter refers to the diameter of a circle when the tomato contours in the top view are fitted into a circle. Fruit height refers to the distance from the tomato stem to the tip of the tomato contour in the side view. Due to the significant impact of tomato shape on its marketability, the closer the tomato is to a circular shape when viewed from above, the better the quality of the tomato. Therefore, in this study, the tomato shape index is defined as the circularity of its contour when viewed from above, calculated using Formula (4).
where
C is the tomato circularity,
Area is the area of a region, and
Rmax is the maximum distance between the points and the center of the region.
When conducting the image processing operation for tomato shape characteristics recognition, images of tomatoes in the top and side views were collected, and we extracted the contour lines of tomatoes in two different directions. We fitted the tomato contour in the top view to obtain the circularity
C of the tomato fruit. At the same time, a circle was fitted based on the tomato contour, of which the diameter is taken as the fruit diameter
D, as shown in
Figure 7A. Then, we calculated the difference in the horizontal axis of the contour in the side view direction as the fruit height
H, as shown in
Figure 7B.
In the study by Klatt et al., the experimental results showed that tomatoes with more seeds have better taste and flavor than those with fewer seeds; therefore, the number of seeds per fruit is important for tomato quality [
34]. When testing the number of seeds per fruit, we randomly selected five mature tomato fruits from each group, chopped the fruits, sorted and counted the number of tomato seeds, and took the average as the number of single fruit seeds in each group.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}