
Design and Field Experiment of Synchronous Hole Fertilization Device for Maize Sowing


 , and
, and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Agronomic Requirements of Synchronous Hole Fertilization for Maize Sowing
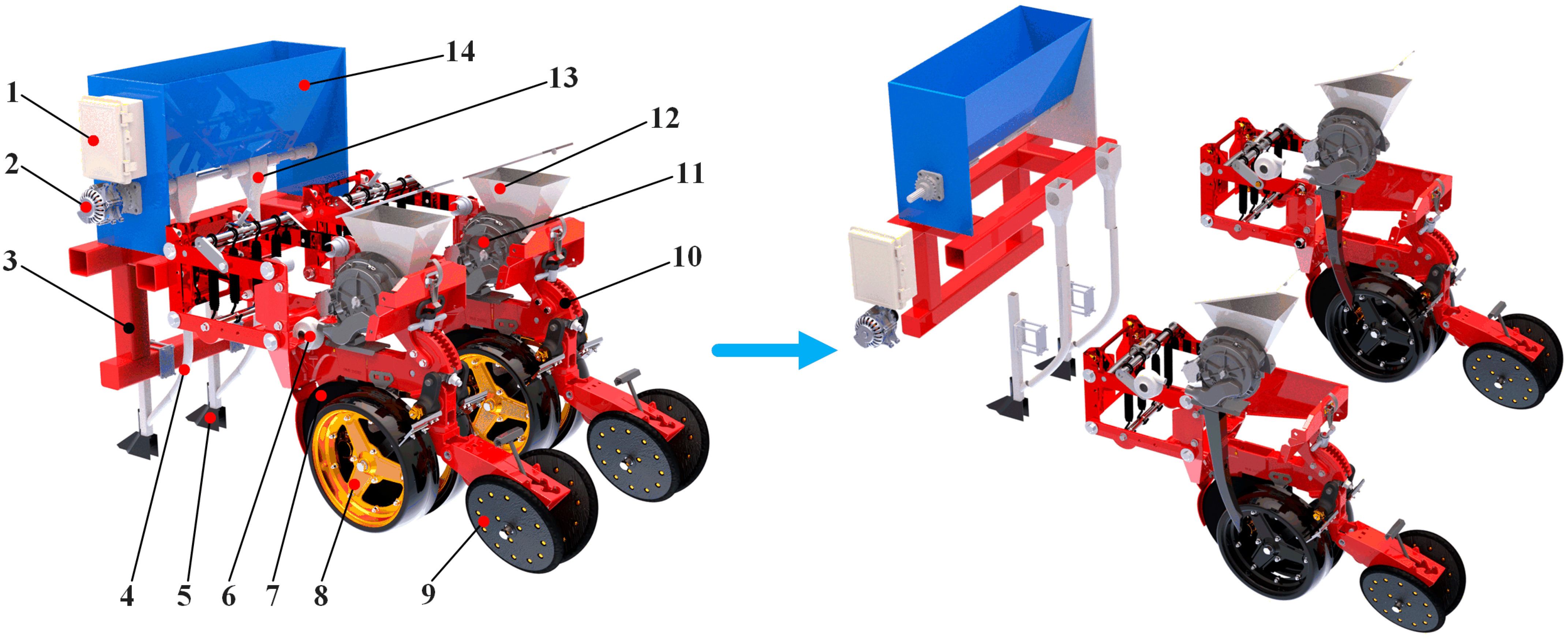
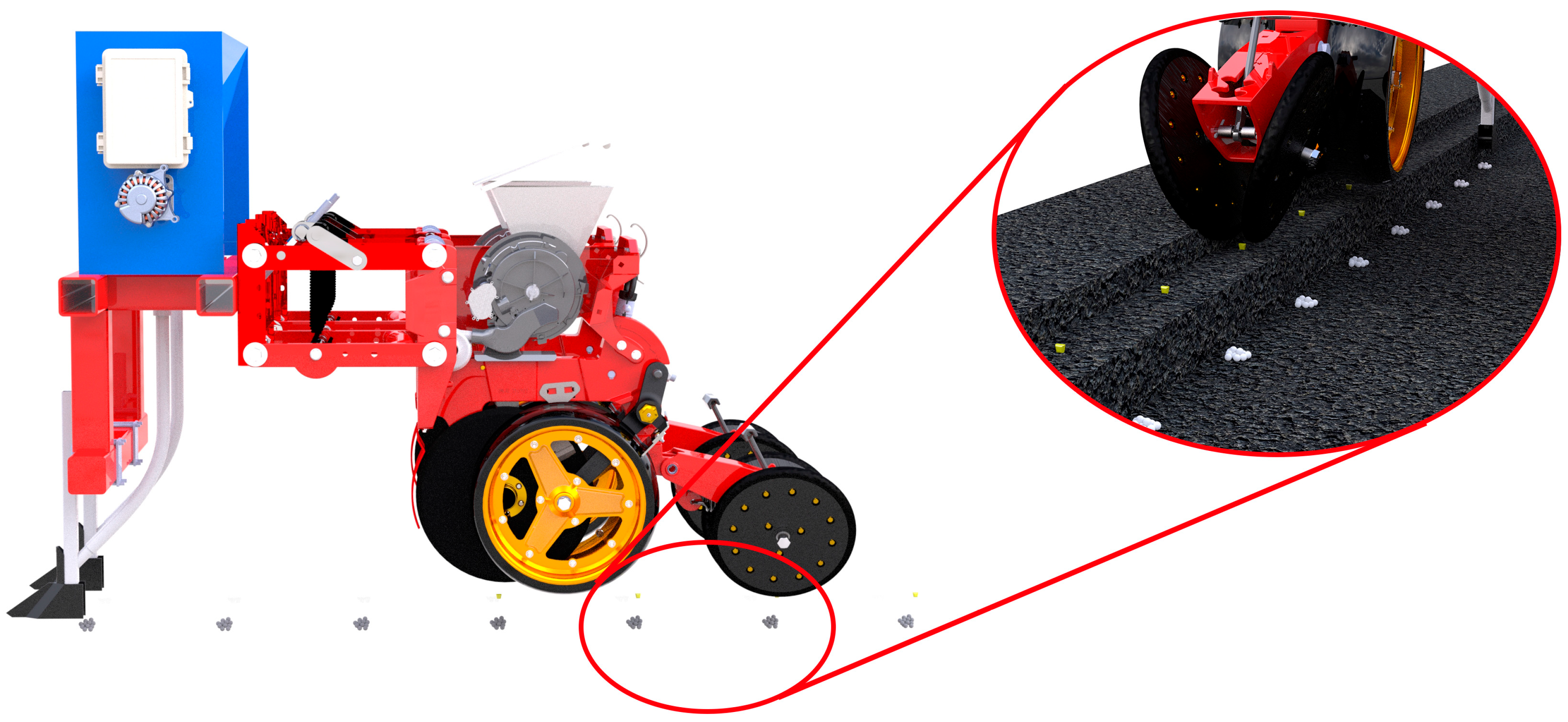
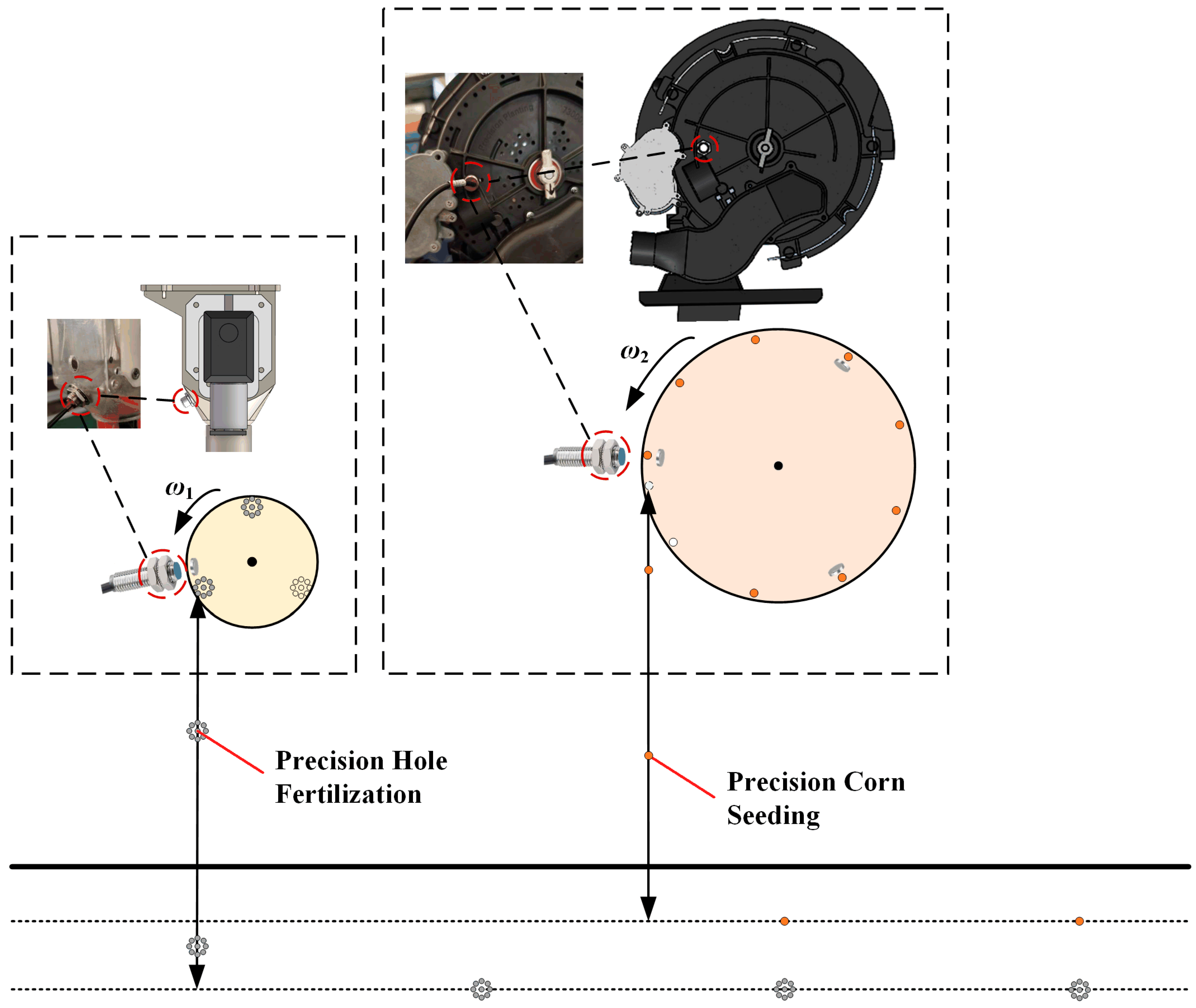
2.2. The Overall Structure and Working Principle of the Corn Seeding Synchronous Hole Fertilization Device
2.3. Development and Examination of Key Components
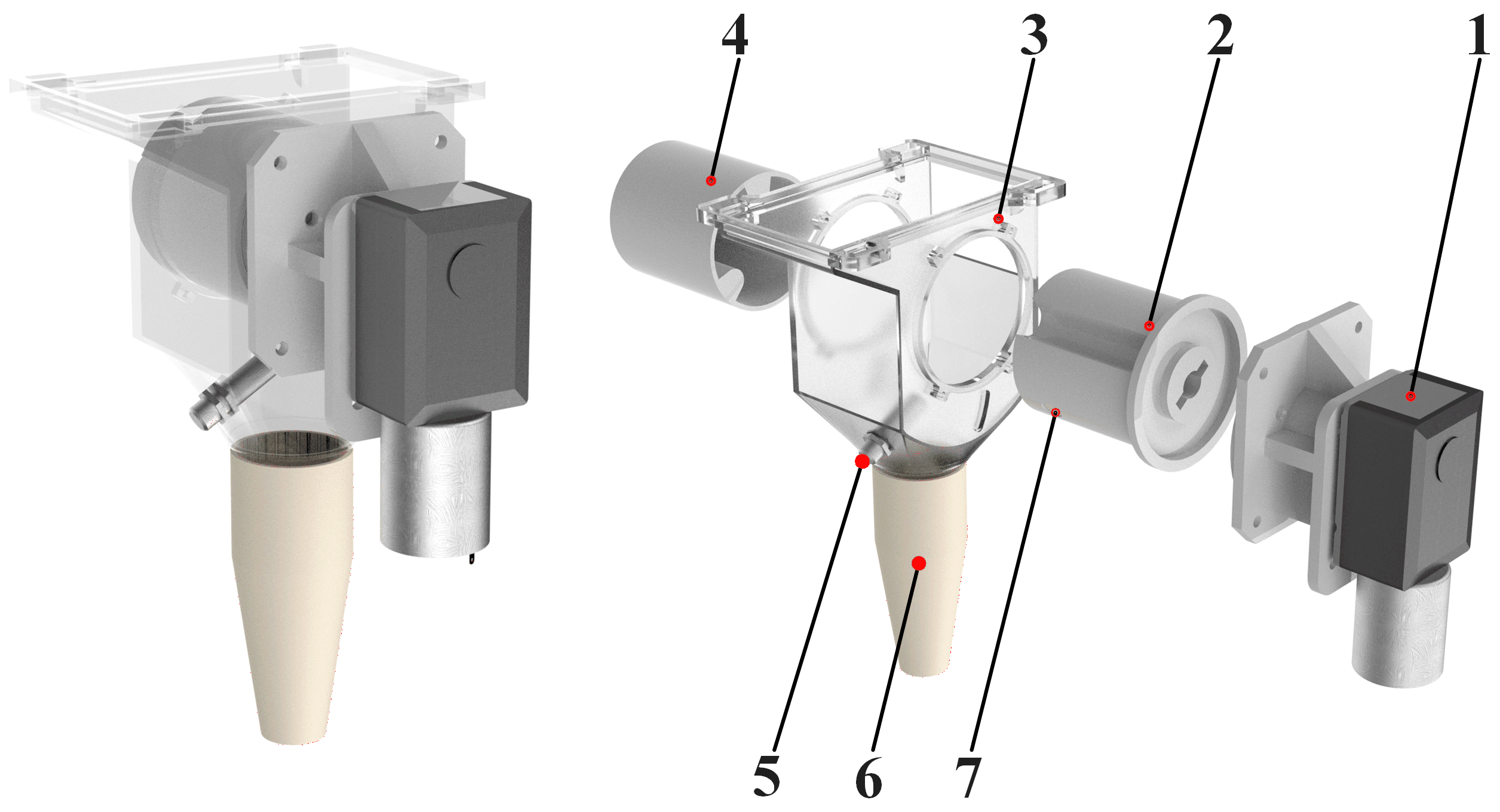
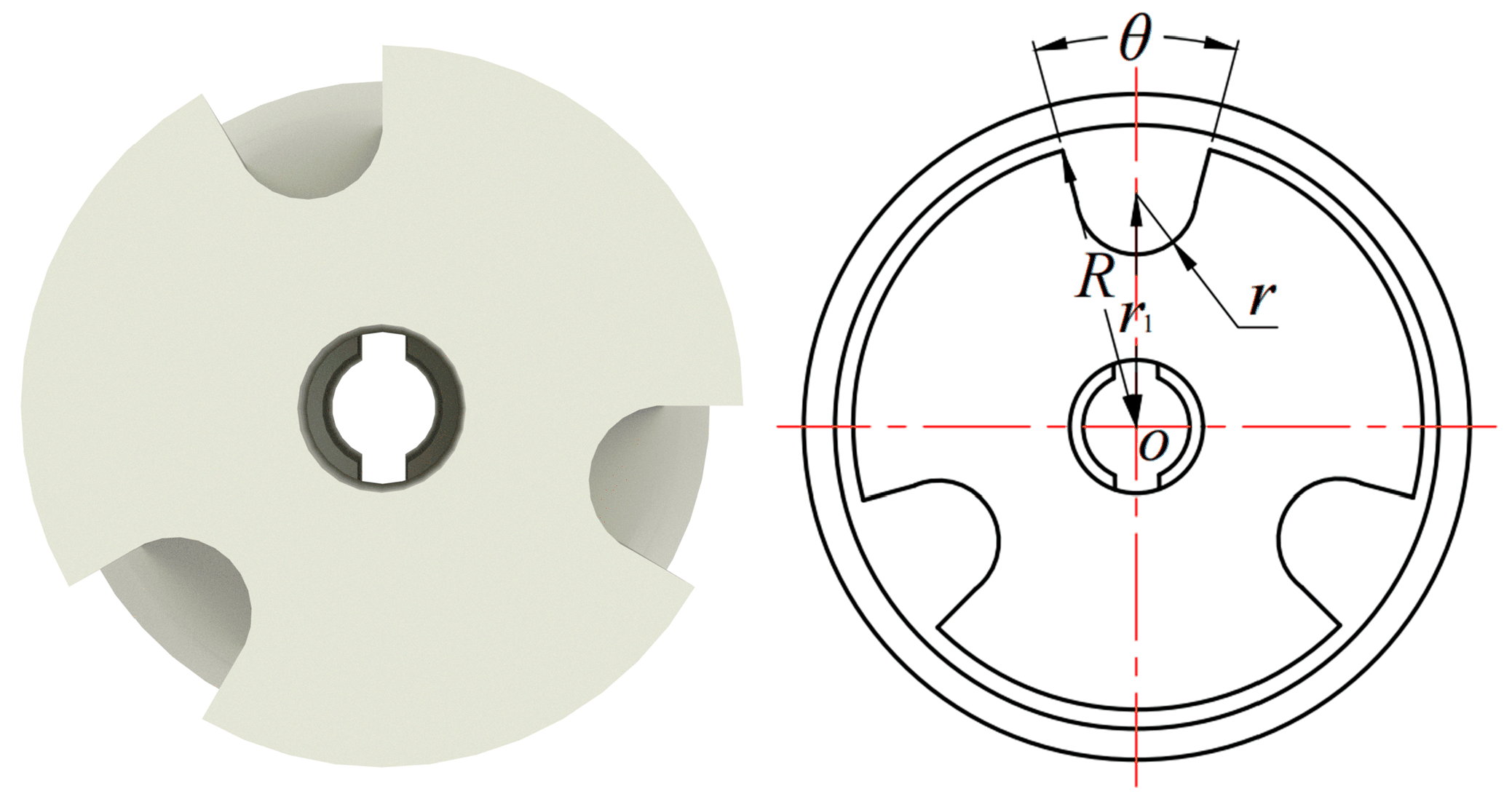
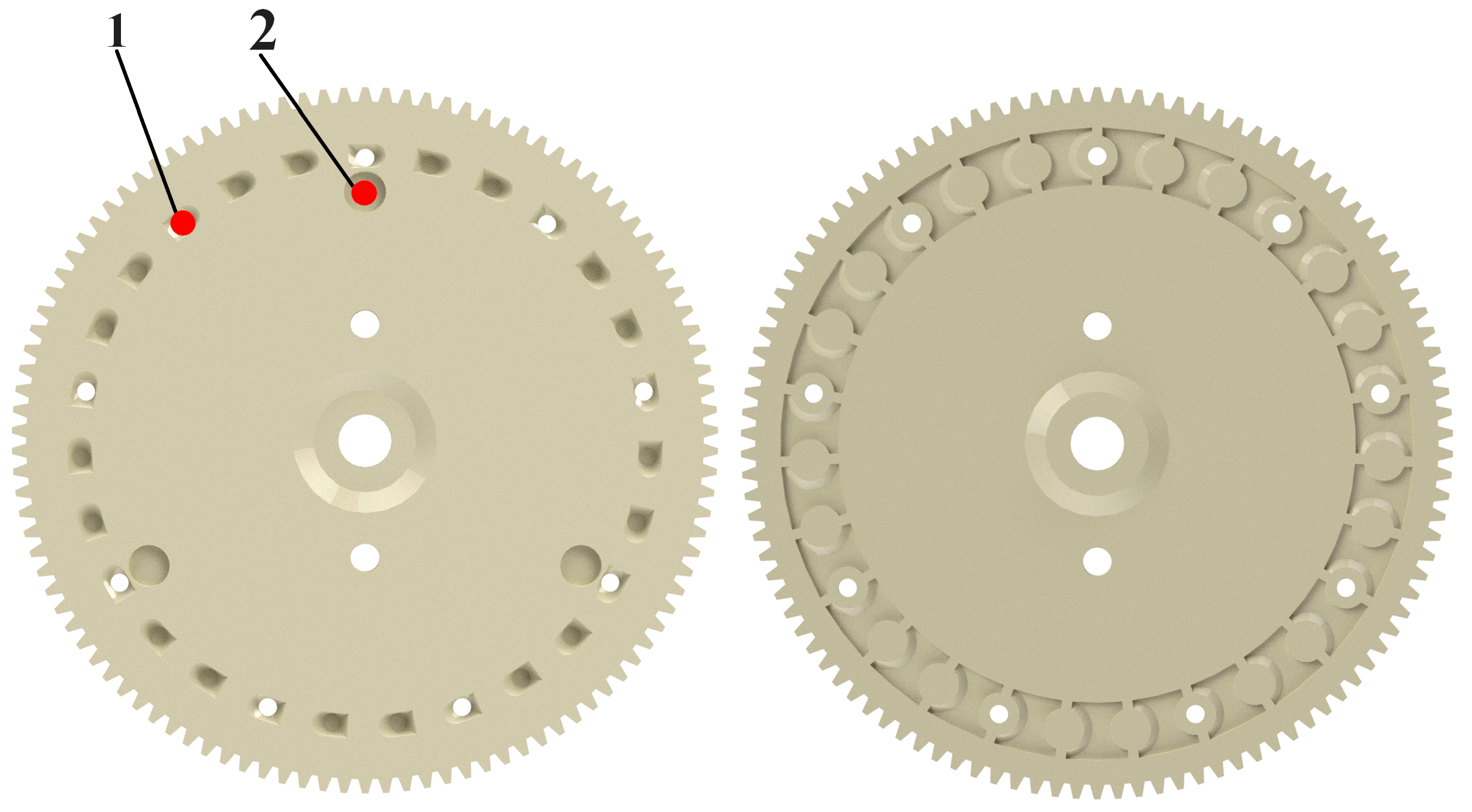
2.3.1. Hole Fertilization Unit
2.3.2. Sowing Unit
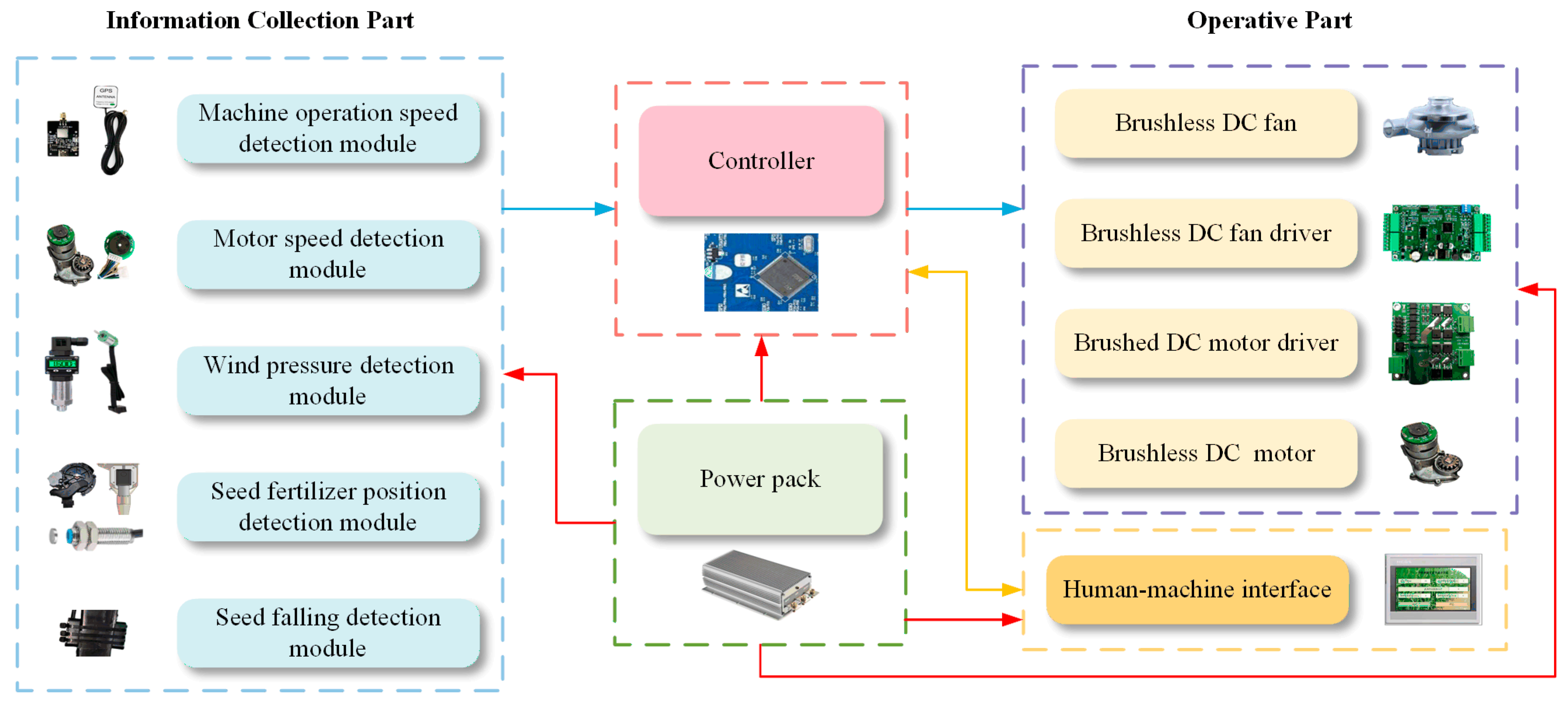
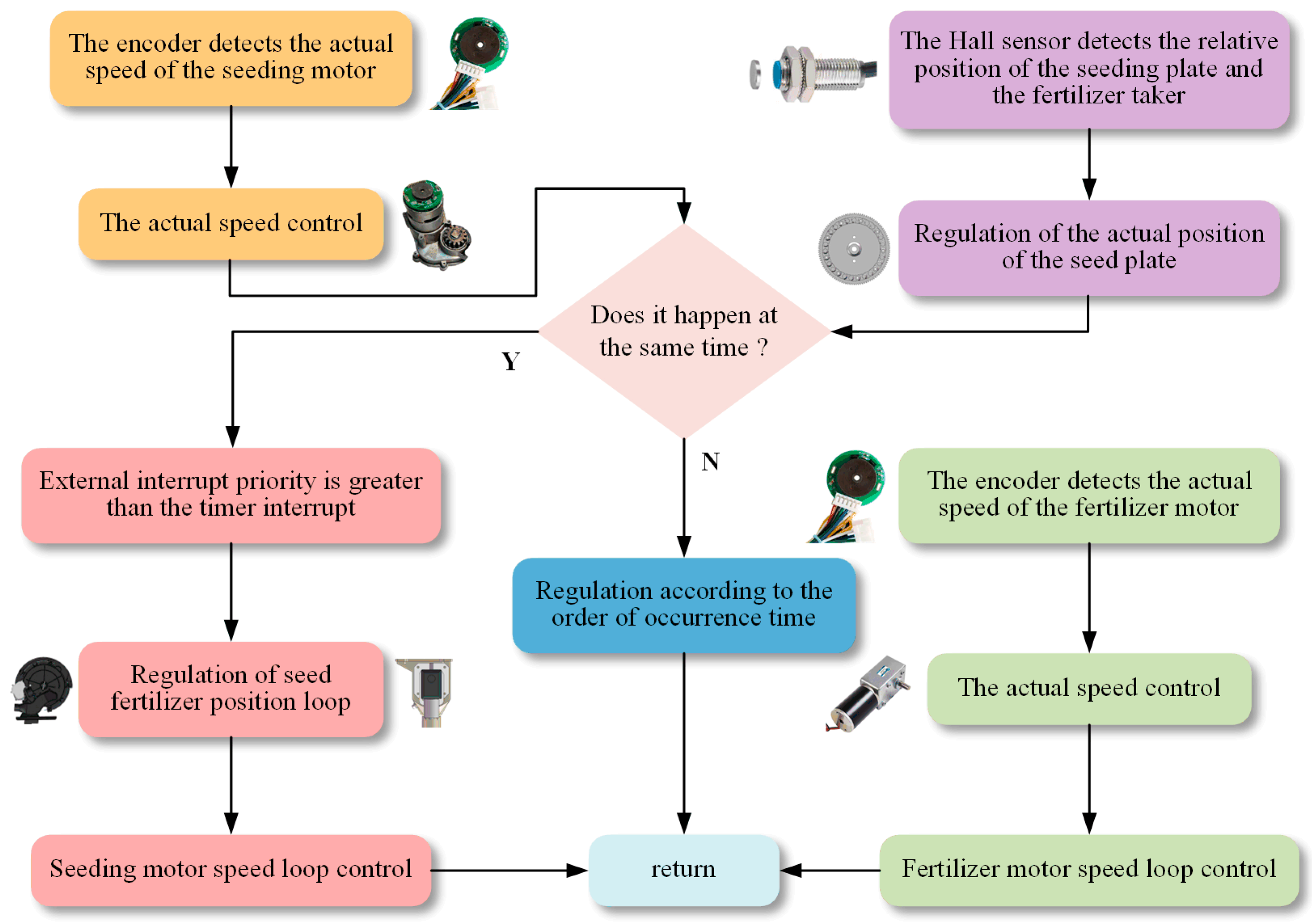
2.3.3. Control System Unit
2.4. Field Test Materials and Conditions
2.5. Field Experiment Design and Evaluation Index
3. Results and Discussion
3.1. Response Surface Design and Results
3.2. Y1 and Y2 Model Establishment and Variance Analysis
3.3. The Influence of Factor Interactions on the Evaluation Index
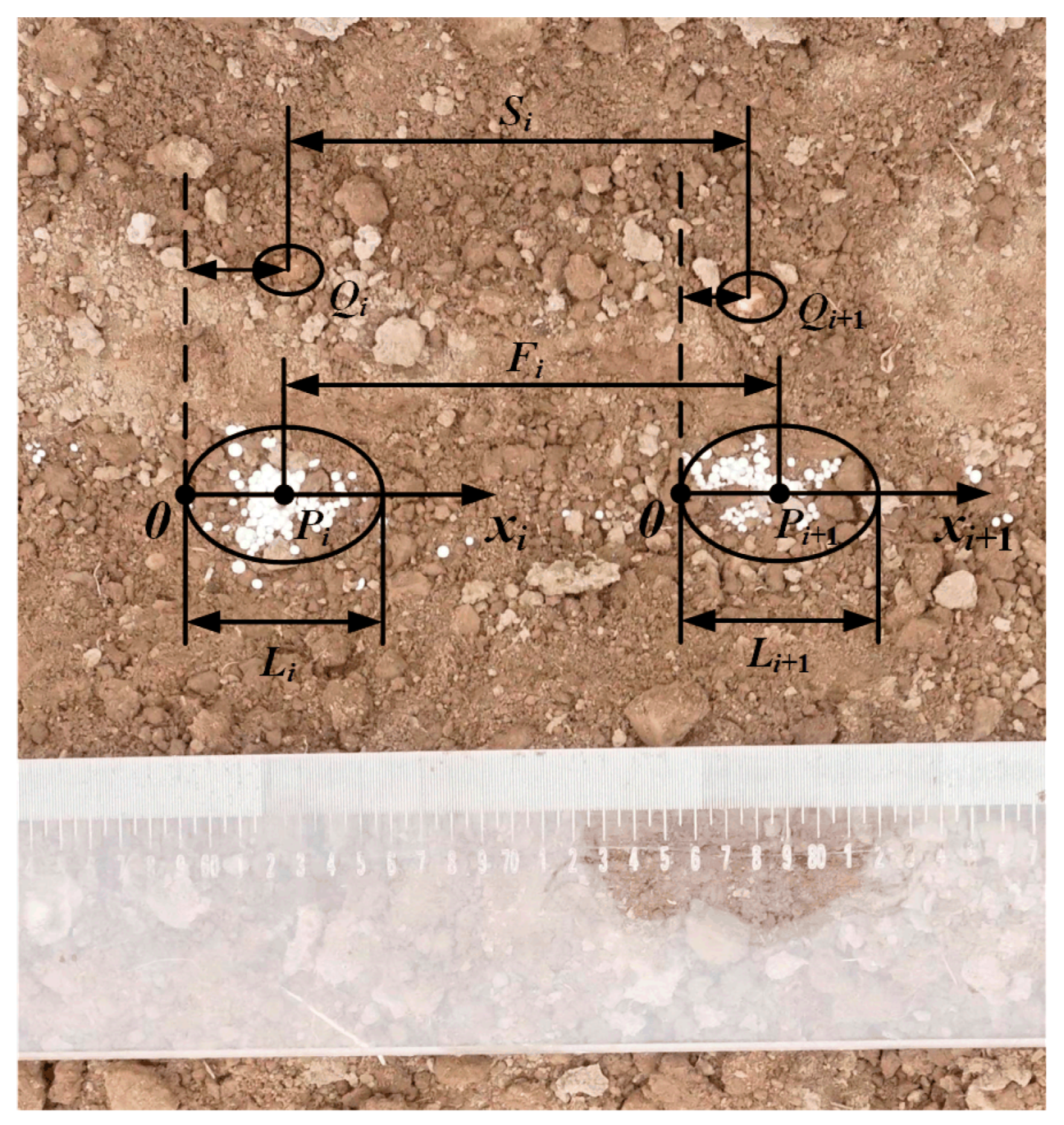
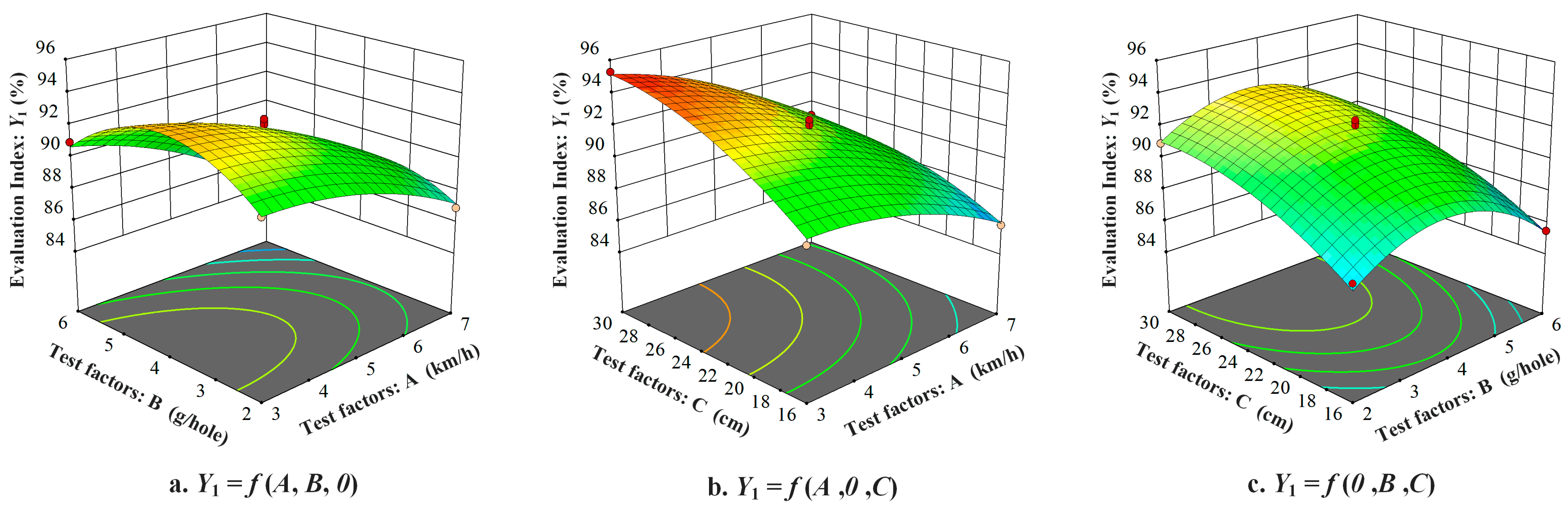
3.3.1. The Effect on the Seed–Fertilizer Alignment Qualification Rate Y1
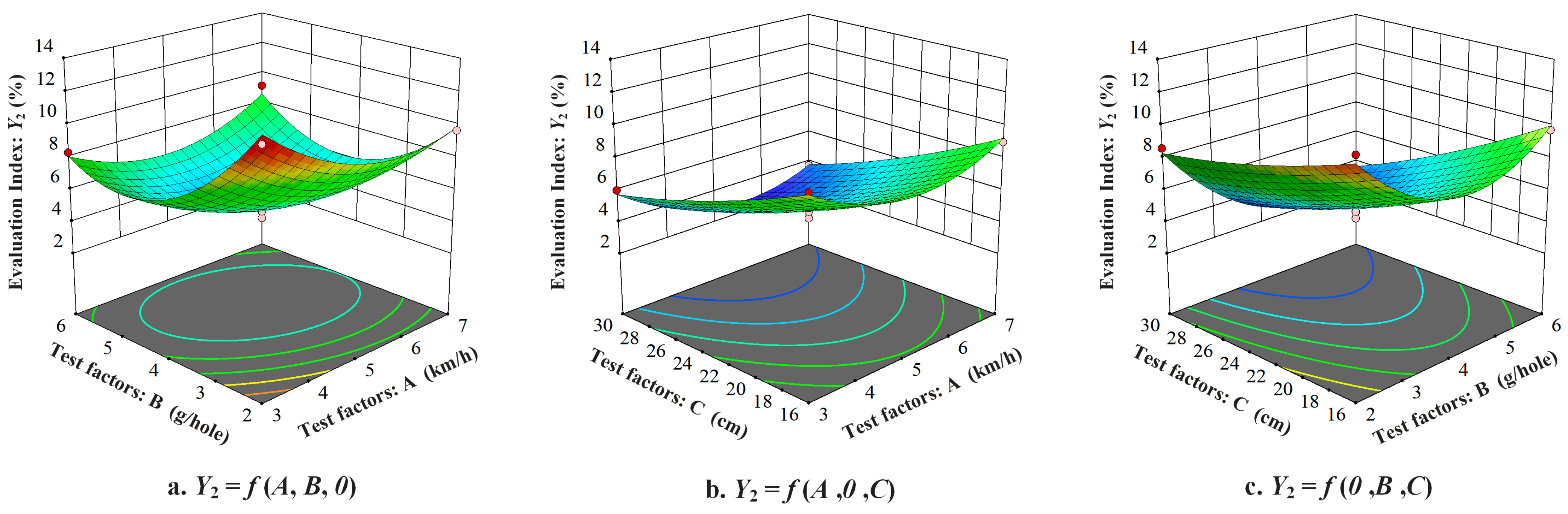
3.3.2. Effect on the Coefficient of Variation in Hole Fertilizing Amount Y2
3.4. Comprehensive Optimization Design and Verification of Experiment Results
3.5. Discussion—Innovations and Comparisons with Other Solutions
4. Conclusions and Prospects
4.1. Conclusions
4.2. Prospects
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Luo, X.; Liao, J.; Hu, L.; Zang, Y.; Zhou, Z. Improving agricultural mechanization level to promote agricultural sustainable development. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2016, 32, 1–11. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, J.; Zhang, W.; Cui, Z.; Ma, W.; Chen, X.; Jiang, R. Nutrient Use Efficiencies of Major Cereal Crops in China and Measures for Improvement. Acta Pedol. Sin. 2008, 45, 915–924. [Google Scholar]
- Liu, Q. Spatio-temporal changes of fertilization intensity and environmental safety threshold in China. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2017, 33, 214–221. [Google Scholar] [CrossRef]
- Zhang, L.; Song, H.; Chen, X.; Lu, D.; Wang, H. Primary Study on Nutrient Migration Under Hole Fertilization in Soils. Soils 2020, 52, 1137–1143. [Google Scholar] [CrossRef]
- Wang, Y.; Bai, Y.; Tan, J.; Liu, J.; Lu, Y.; Han, Y. Availability study of once quantitative fertilization in summer maize using fertilizer tablets. J. Plant Nutr. Fertil. 2016, 22, 1126–1132. [Google Scholar] [CrossRef]
- Tang, H.; Wang, J.; Xu, C.; Zhou, W.; Wang, J.; Wang, X. Research Progress Analysis on Key Technology of Chemical Fertilizer Reduction and Efficiency Increase. Trans. Chin. Soc. Agric. Mach. 2019, 50, 1–19. [Google Scholar] [CrossRef]
- Zhang, X. Research on the Equipment of Hill-drop Drill and Fertilization. Master’s Thesis, Northwest A&F University, Xianyang, China, 2009. [Google Scholar]
- Zhang, R. Study on Control System of Synchronous Hole Fertilization for Maize Sowing. Master’s Thesis, Heilongjiang Bayi Agricultural University, Daqing, China, 2023. [Google Scholar]
- Liu, Z.; Wang, Q.; Liu, C.; Li, H.; He, J.; Liu, J. Design and Experiment of Precision Hole-fertilizing Apparatus with Notched Plate. Trans. Chin. Soc. Agric. Mach. 2018, 49, 137–144, 355. [Google Scholar] [CrossRef]
- Liao, Q.; Chen, Y.; Zhang, Q.; Wang, L.; Lin, J.; Wenbin, D. Design and Experiment of Side Deep Hole Fertilization Device for Rapeseed. Trans. Chin. Soc. Agric. Mach. 2023, 54, 41–52. [Google Scholar] [CrossRef]
- Cay, A.; Kocabiyik, H.; May, S. Development of an electro-mechanic control system for seed-metering unit of single seed corn planters Part I: Design and laboratory simulation. Comput. Electron. Agric. 2018, 144, 71–79. [Google Scholar] [CrossRef]
- Cay, A.; Kocabiyik, H.; May, S. Development of an electro-mechanic control system for seed-metering unit of single seed corn planters Part II: Field performance. Comput. Electron. Agric. 2018, 145, 11–17. [Google Scholar] [CrossRef]
- Yuan, Y.; Bai, H.; Fang, X.; Wang, D.; Zhou, L.; Niu, K. Research Progress on Maize Seeding and Its Measurement and Control Technology. Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–18. [Google Scholar] [CrossRef]
- Da Silva, M.J.; Magalhães, P.S.G. Modeling and design of an injection dosing system for site-specific management using liquid fertilizer. Precis. Agric. 2019, 20, 649–662. [Google Scholar] [CrossRef]
- Du, X.; Liu, C.; Jiang, M.; Yuan, H.; Dai, L.; Li, F. Design and Experiment of Inclined Trapezoidal Hole Fertilizer Point-applied Discharging Device. Trans. Chin. Soc. Agric. Mach. 2021, 52, 43–53. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, X.; Li, S.; Huang, Y.; Yan, X.; Zhao, H. Design of Maize Automatic Hole Fertilization System Targeting at Seed Based on Planetary Gear Train. Trans. Chin. Soc. Agric. Mach. 2023, 54, 60–67. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Q.; Li, H.; He, J.; Lu, C.; Xie, L. Design of Flexible Fertilizer Protection Mechanism for Hole-fertilizing Apparatus with Notched Plate. Trans. Chin. Soc. Agric. Mach. 2018, 49, 97–103. [Google Scholar] [CrossRef]
- Li, G.; Su, X.; Zhou, X.; Zhang, X.; Wang, Q.; Wang, C. Design and Experiment of Pneumatic Assisted Hole Fertilization Targeting Seed Position Device. Trans. Chin. Soc. Agric. Mach. 2024, 55, 191–200. [Google Scholar] [CrossRef]
- Liu, X.; Wang, X.; Chen, L.; Zhang, C.; Liu, W.; Ding, Y. Design and experiments of layered and quantitative fertilization device for rapeseed seeder. Trans. Chin. Soc. Agric. Eng. 2021, 37, 1–10. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, D.; Xie, F.; Zheng, P.; Song, S. Parameter optimization of spiral inclined fertilization device and its trial for rice side deep fertilization. J. Hunan Agric. Univ. 2024, 50, 109–114+122. [Google Scholar] [CrossRef]
- Wu, N.; Lin, J.; Li, B. Design and Test on No-tillage Planter Precise Hole Fertilization System. Trans. Chin. Soc. Agric. Mach. 2018, 49, 64–72. [Google Scholar] [CrossRef]
- Wang, W.; Song, J.; Zhou, G.; Quan, L.; Zhang, C.; Chen, L. Development and Numerical Simulation of a Precision Strip-Hole Layered Fertilization Subsoiler While Sowing Maize. Agriculture 2022, 12, 938. [Google Scholar] [CrossRef]
- Wang, J.; Li, S.; Zhang, Z.; Li, Q. Design and experiment of electrical drive side deep hill-drop fertilization system for precision rice hill-direct-seeding machine. Trans. Chin. Soc. Agric. Eng. 2018, 34, 43–54. [Google Scholar] [CrossRef]
- Liang, Y.; Tang, Z.; Ji, C.; Zheng, X.; Liu, J.; Li, Q.; Zhang, L. Optimization and Experiment of Structural Parameters of Outer Groove Wheel Fertilizer Drainer. J. Agric. Mech. Res. 2023, 45, 7–14. [Google Scholar] [CrossRef]
- Liang, J.; Pan, F.; Chen, J.; Zhang, H.; Ji, C. A Precise Simultaneous Sowed Control System for Maize Seed and Fertilizer. Agriculture 2024, 14, 192. [Google Scholar] [CrossRef]
- Pan, F.; Chen, J.; Zhang, H.; Wang, B.; Jiang, X.; Ji, C. Numerical Simulation and Bench Test of Crawler-Type Cotton Time-Delay Hole-Forming Device Based on RecurDyn-EDEM Coupling. Machines 2024, 12, 463. [Google Scholar] [CrossRef]
- Yao, Y.; Chen, X.; Ji, C.; Chen, J.; Zhang, H.; Pan, F. Design and experiments of the single driver for maize precision seeders based on fuzzy PID control. Trans. Chin. Soc. Agric. Eng. 2022, 38, 12–21. [Google Scholar] [CrossRef]
- Yao, Y. Design and Research of Control System for High Speed and Precision Seeding of Corn. Master’s Thesis, Shihezi University, Shihezi, China, 2022. [Google Scholar]
- Zhang, J.; Liu, H.; Gao, J.; Lin, Z.; Chen, Y. Simulation and Test of Corn Layer Alignment Position Hole Fertilization Seeder Based on SPH. Trans. Chin. Soc. Agric. Mach. 2018, 49, 66–72. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Types of Uses | Corn Plant Classification | Classification of Growth Period | Planting Density (plant/mu) | Plant Spacing (cm) | Per-Hole Fertilization Amount (g) |
|---|---|---|---|---|---|
| Normal maize | Compact | Mid-season variety | 4500~6000 | 20~27 | 3~4 |
| Semi-compact | Late-maturing breed | 4000~5000 | 24~30 | 2~3 | |
| Compact | Late-maturing breed | 6000~7500 | 16~20 | 3~4 | |
| Corn for silage | Flat type | Mid-season variety | 4500~5500 | 22~27 | 5~6 |
| Semi-compact | Late-maturing breed | 5000~6000 | 20~24 | 4~5 | |
| Pop maize | Compact | Early-maturing variety | 5000~6600 | 18~24 | 2~3 |
| Semi-compact | Mid-season variety | 4500~5500 | 22~27 | 3~4 |
| Serial Number | Parameter Name | Numerical Value |
|---|---|---|
| 1 | Dimensions/(mm × mm × mm) | 1800 × 1000 × 1200 |
| 2 | Whole machine mass/kg | 625 |
| 3 | Operating speed/(km·h−1) | 3~7 |
| 4 | Fertilization hole distance/mm | 160~300 |
| 5 | Fertilization depth/mm | 80~110 |
| 6 | Per-hole fertilizer amount/g | 2~6 |
| 7 | Coefficient of variation in hole fertilizing amount/% | ≤25 |
| 8 | Fertilization depth pass rate/% | ≥75 |
| 9 | Relative position deviation of seed fertilizer/mm | ≤20 |
| Test Factors | Coded Value | |||
|---|---|---|---|---|
| −1 | 0 | 1 | ||
| A | Implemented forward speed (km/h) | 3 | 5 | 7 |
| B | Per-hole target fertilizing amount (g) | 2 | 4 | 6 |
| C | Plant spacing (fertilizer hole interval) (cm) | 16 | 23 | 30 |
| Test Number | Factors | Y1—Seed–Fertilizer Alignment Qualification Rate (%) | Y2—Coefficient of Variation in Hole Fertilizing Amount (%) | ||
|---|---|---|---|---|---|
| A | B | C | |||
| 1 | −1 | −1 | 0 | 90.77 | 12.54 |
| 2 | 1 | −1 | 0 | 86.91 | 9.67 |
| 3 | −1 | 1 | 0 | 90.95 | 8.32 |
| 4 | 1 | 1 | 0 | 84.32 | 9.14 |
| 5 | −1 | 0 | −1 | 89.24 | 9.96 |
| 6 | 1 | 0 | −1 | 85.86 | 9.01 |
| 7 | −1 | 0 | 1 | 95.28 | 6.01 |
| 8 | 1 | 0 | 1 | 89.14 | 3.68 |
| 9 | 0 | −1 | −1 | 87.06 | 12.03 |
| 10 | 0 | 1 | −1 | 85.48 | 9.74 |
| 11 | 0 | −1 | 1 | 90.93 | 8.62 |
| 12 | 0 | 1 | 1 | 88.89 | 3.15 |
| 13 | 0 | 0 | 0 | 92.28 | 4.24 |
| 14 | 0 | 0 | 0 | 91.31 | 4.67 |
| 15 | 0 | 0 | 0 | 91.44 | 4.65 |
| 16 | 0 | 0 | 0 | 92.09 | 5.88 |
| 17 | 0 | 0 | 0 | 92.43 | 4.93 |
| Indicator | Source of Variance | Sum of Squares | Freedom | Mean Square | F | p | Significance |
|---|---|---|---|---|---|---|---|
| Y1 | Model | 136.37 | 9 | 15.15 | 57.60 | <0.0001 | ** |
| A | 50.05 | 1 | 50.05 | 190.26 | <0.0001 | ** | |
| B | 4.55 | 1 | 4.55 | 17.28 | 0.0043 | ** | |
| C | 34.45 | 1 | 34.45 | 130.94 | <0.0001 | ** | |
| AB | 1.92 | 1 | 1.92 | 7.29 | 0.0306 | * | |
| AC | 1.90 | 1 | 1.90 | 7.24 | 0.0311 | * | |
| BC | 0.053 | 1 | 0.053 | 0.20 | 0.6674 | ||
| A2 | 3.73 | 1 | 3.73 | 14.18 | 0.0070 | ** | |
| B2 | 31.41 | 1 | 31.41 | 119.40 | <0.0001 | ** | |
| C2 | 4.99 | 1 | 4.99 | 18.97 | 0.0033 | ** | |
| Residual | 1.84 | 7 | 0.26 | ||||
| Lack-of-fit | 0.82 | 3 | 0.27 | 1.07 | 0.4550 | ns | |
| Pure Error | 1.02 | 4 | 0.26 | ||||
| Corrected Total | 138.22 | 16 | |||||
| Y2 | Model | 137.33 | 9 | 15.26 | 36.89 | <0.0001 | ** |
| A | 3.55 | 1 | 3.55 | 8.59 | 0.0220 | * | |
| B | 19.56 | 1 | 19.56 | 47.30 | 0.0002 | ** | |
| C | 46.46 | 1 | 46.46 | 112.34 | <0.0001 | ** | |
| AB | 3.40 | 1 | 3.40 | 8.23 | 0.0240 | * | |
| AC | 0.48 | 1 | 0.48 | 1.15 | 0.3189 | ||
| BC | 2.53 | 1 | 2.53 | 6.11 | 0.0427 | * | |
| A2 | 15.39 | 1 | 15.39 | 37.20 | 0.0005 | ** | |
| B2 | 41.30 | 1 | 41.30 | 99.84 | <0.0001 | ** | |
| C2 | 0.61 | 1 | 0.61 | 1.46 | 0.2655 | ||
| Residual | 2.90 | 7 | 0.41 | ||||
| Lack-of-fit | 1.39 | 3 | 0.46 | 1.23 | 0.4096 | ns | |
| Pure Error | 1.51 | 4 | 0.38 | ||||
| Corrected Total | 140.23 | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, F.; Chen, J.; Wang, B.; Fang, Z.; Liang, J.; He, K.; Ji, C. Design and Field Experiment of Synchronous Hole Fertilization Device for Maize Sowing. Agriculture 2025, 15, 1400. https://doi.org/10.3390/agriculture15131400
Pan F, Chen J, Wang B, Fang Z, Liang J, He K, Ji C. Design and Field Experiment of Synchronous Hole Fertilization Device for Maize Sowing. Agriculture. 2025; 15(13):1400. https://doi.org/10.3390/agriculture15131400
Chicago/Turabian StylePan, Feng, Jincheng Chen, Baiwei Wang, Ziheng Fang, Jinxin Liang, Kangkang He, and Chao Ji. 2025. "Design and Field Experiment of Synchronous Hole Fertilization Device for Maize Sowing" Agriculture 15, no. 13: 1400. https://doi.org/10.3390/agriculture15131400
APA StylePan, F., Chen, J., Wang, B., Fang, Z., Liang, J., He, K., & Ji, C. (2025). Design and Field Experiment of Synchronous Hole Fertilization Device for Maize Sowing. Agriculture, 15(13), 1400. https://doi.org/10.3390/agriculture15131400