

DGA-ACO: Enhanced Dynamic Genetic Algorithm—Ant Colony Optimization Path Planning for Agribots

Abstract
1. Introduction
2. Materials and Methods
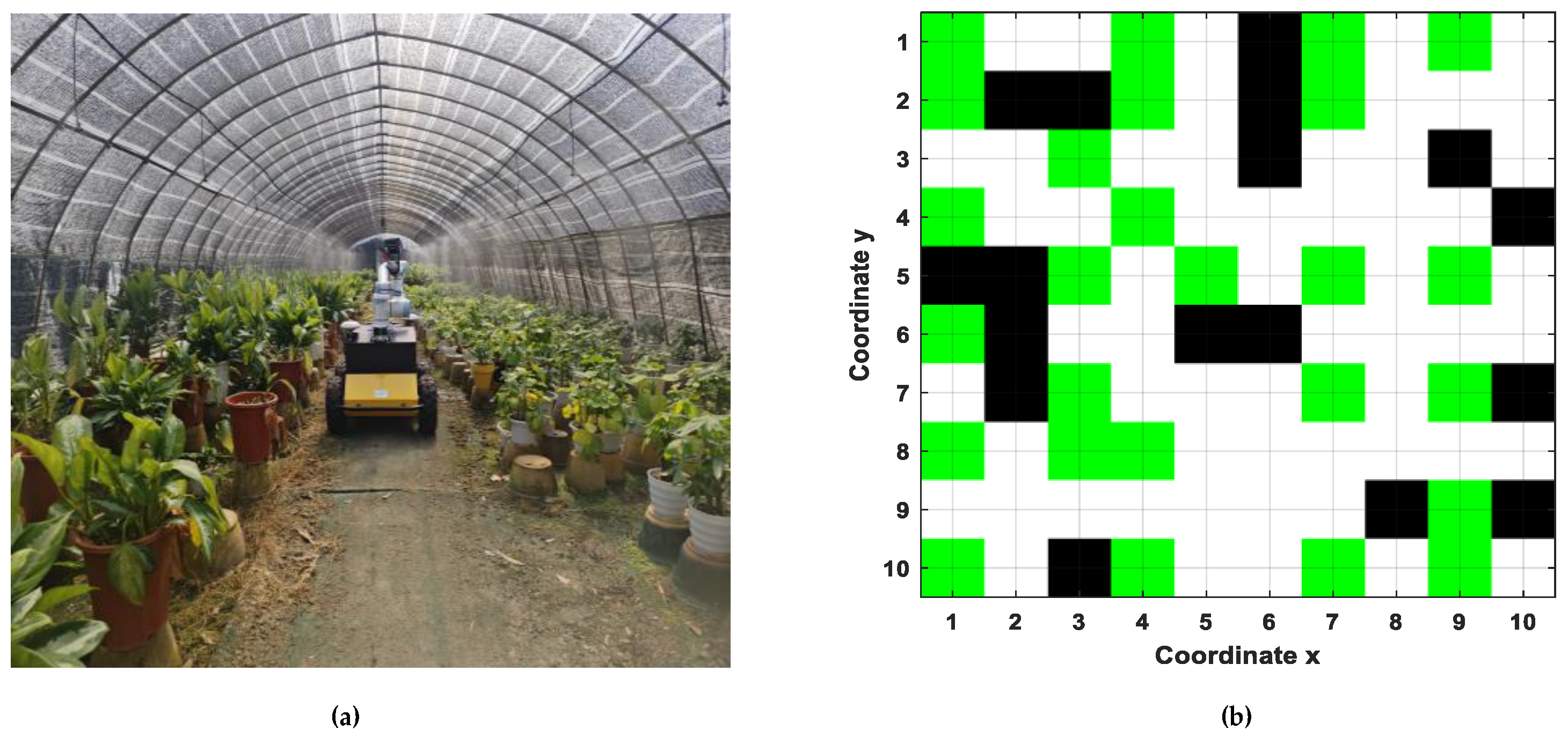
2.1. Environmental Modeling for Agricultural Scenarios
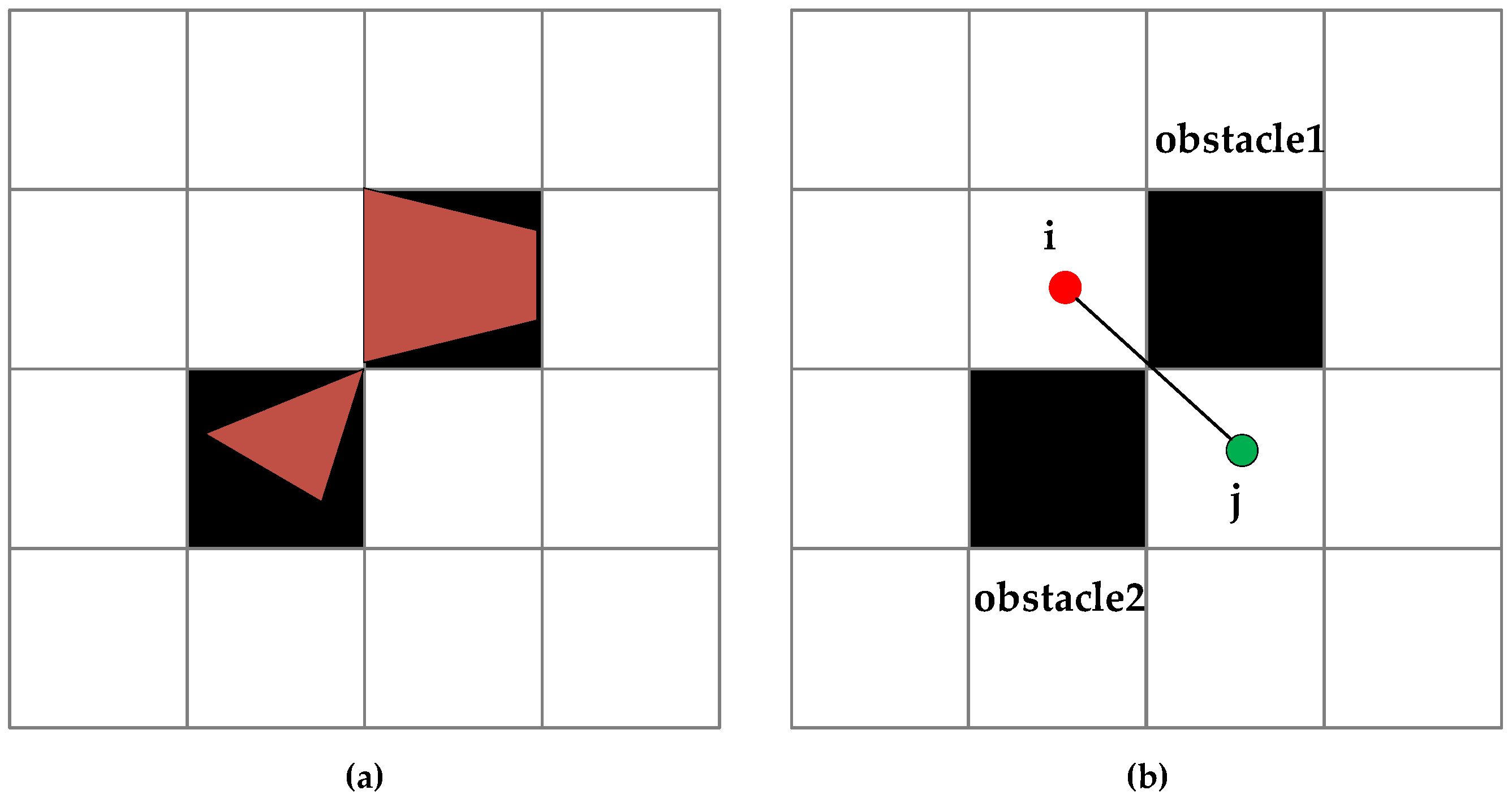
2.2. Preprocessing of Narrow Spaces in Maps
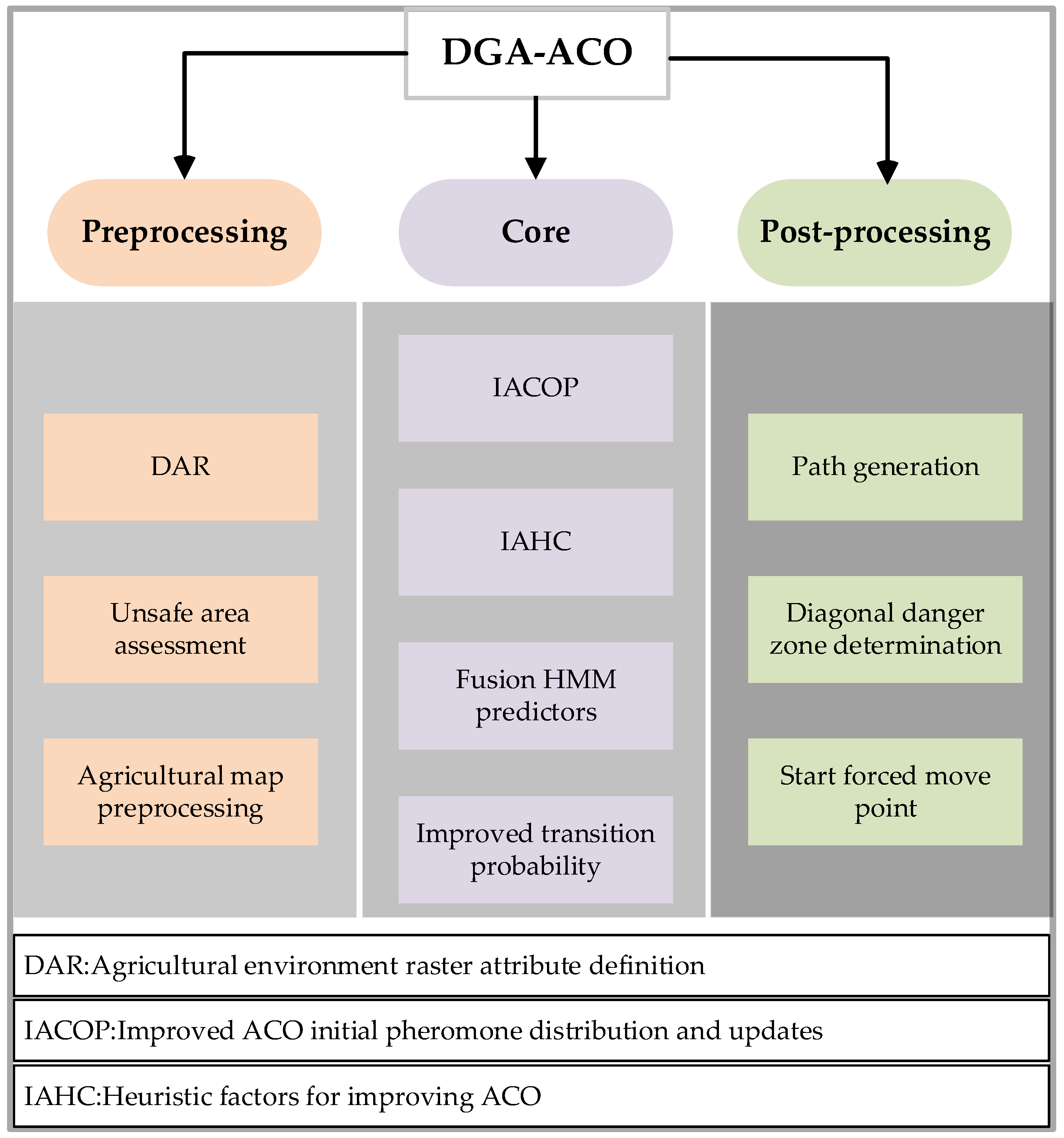
2.3. DGA-ACO Algorithm
2.3.1. Optimization of ACO Pheromone Initialization via Cross Entropy and Genetic Algorithm
- Step 1:
- Generate candidate solutions: Here, 100 ants perform 50 iterations of path optimization using the GA, and the top 10% of all iterations are selected as elite solutions.
- Step 2:
- Calculate initial pheromone: For each edge , count its appearance times in all elite solutions and sum them weighted by the path length.
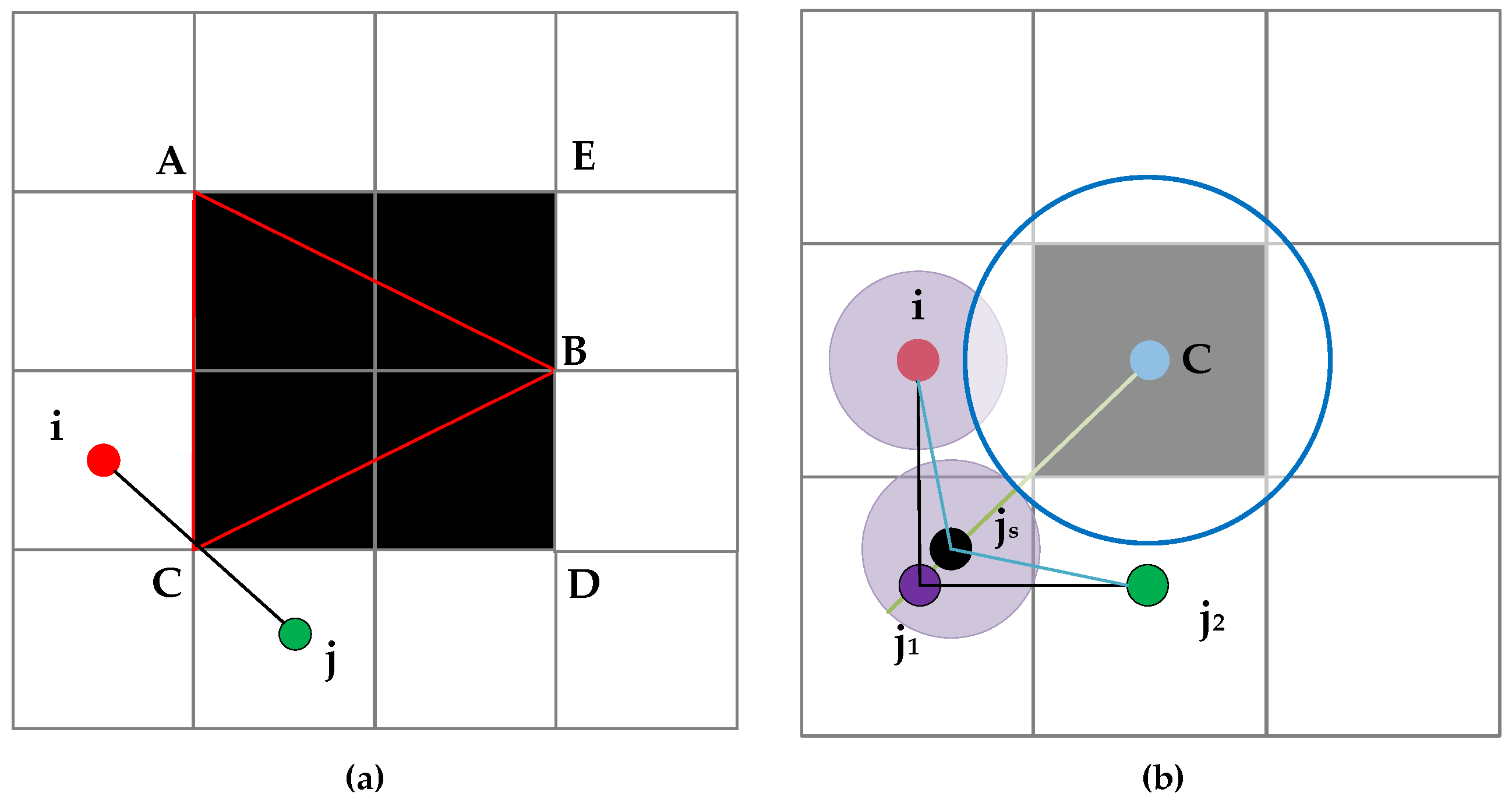
2.3.2. Dynamic Obstacle Prediction Mechanism
2.3.3. Hybrid Path Fitness Function Integrating GA and HMM Components
- Path Length Factor and Smoothness Factor
- 2.
- Waypoint Safety Risk Assessment Factor
- 3.
- Dynamic Obstacle Prediction Factor
- 4.
- The Design of the Path Adaptation Function
2.3.4. Enhanced Pheromone Updating via Genetic Operators
- Step 1:
- Select two parent paths from the path generated by the current ant (like roulette wheel selection).
- Step 2:
- Perform crossover operations on the parent path to generate child paths.
- Step 3:
- If an edge appears in the child path (), its pheromone increment is the average of the pheromones of the two parent generations.
- Step 1:
- Randomly select a path for mutation.
- Step 2:
- Apply uniformly distributed random perturbations to the newly added edge () in the mutation operation.
2.3.5. State Transition Function of DGA-ACO
2.4. Post-Processing of Dangerous Nodes in the Path
3. Experiments and Results
3.1. Experimental Params’ Setting and Pseudocode
| Algorithm 1: Pseudocode of the DGA-ACO algorithm |
| Input: Max iterations K, Max Ant count M Output: 1. Initialize = 1, = 3, = 10, = 3, = 1, 2. for k = 1 to K do 3. for m = 1 to M do 4. while not reached destination do 5. if , then 6. according to the calculated transition probability , move the next node 7. else 8. enable crossover factor and mutation factor , move the next node 9. end if 10. end while 11. evaluate path fitness: , update pheromones locally: 12. end for 13. update global pheromone: 14. if , then 15. 16. end if 17. end for 18. return |
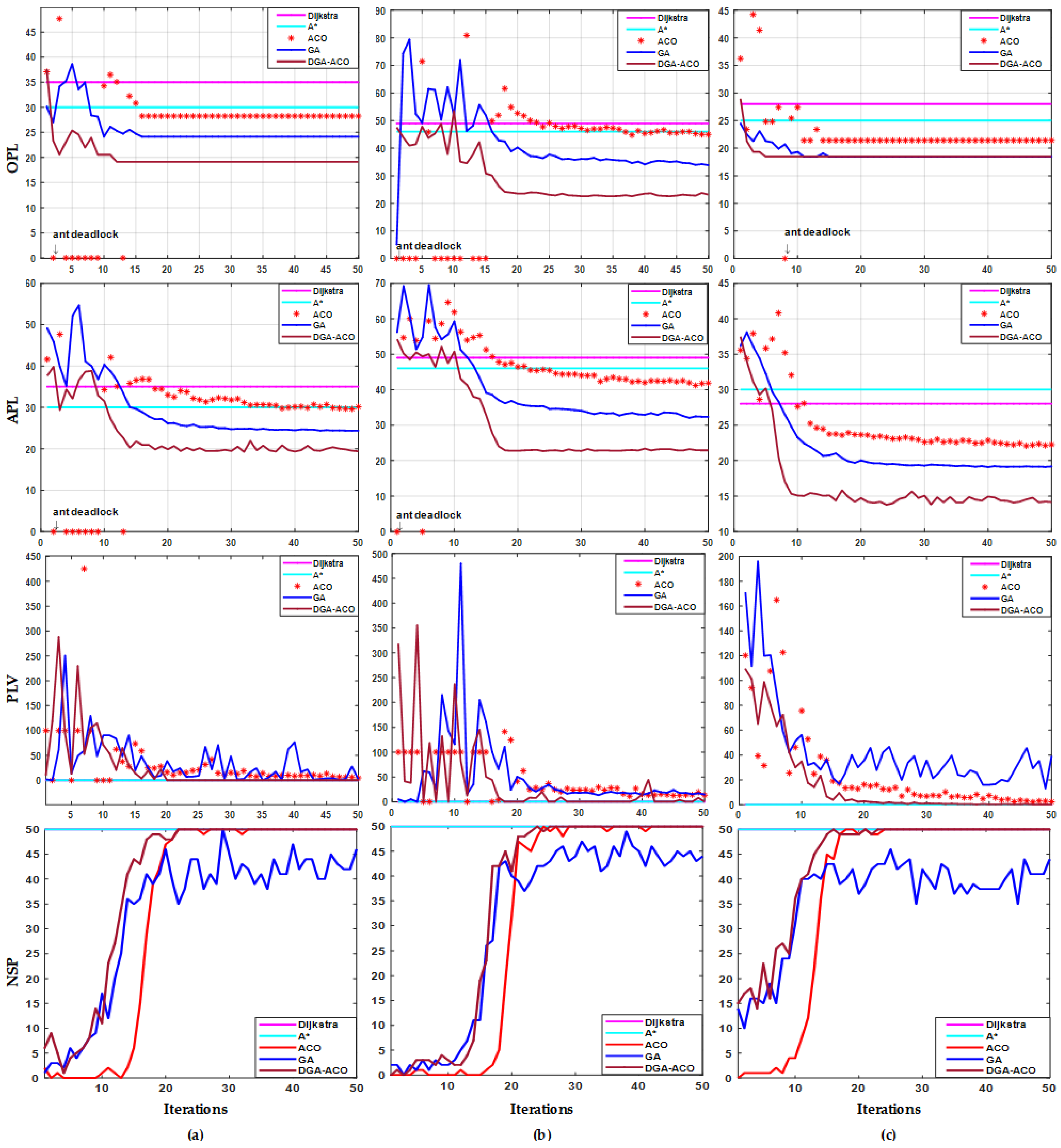
3.2. Algorithm Evaluation Metrics
3.3. Experiments on DGA-ACO Mechanism Effectiveness
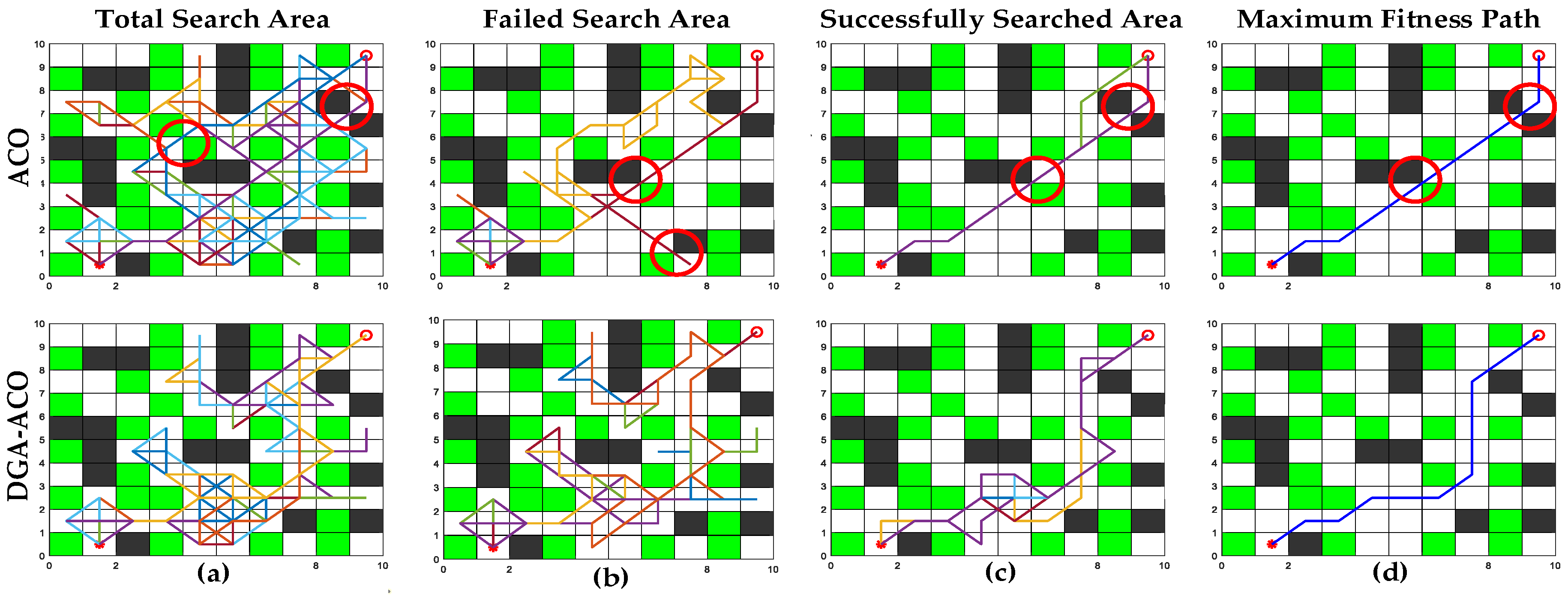
3.3.1. Path Search and Planning Capability Experiments
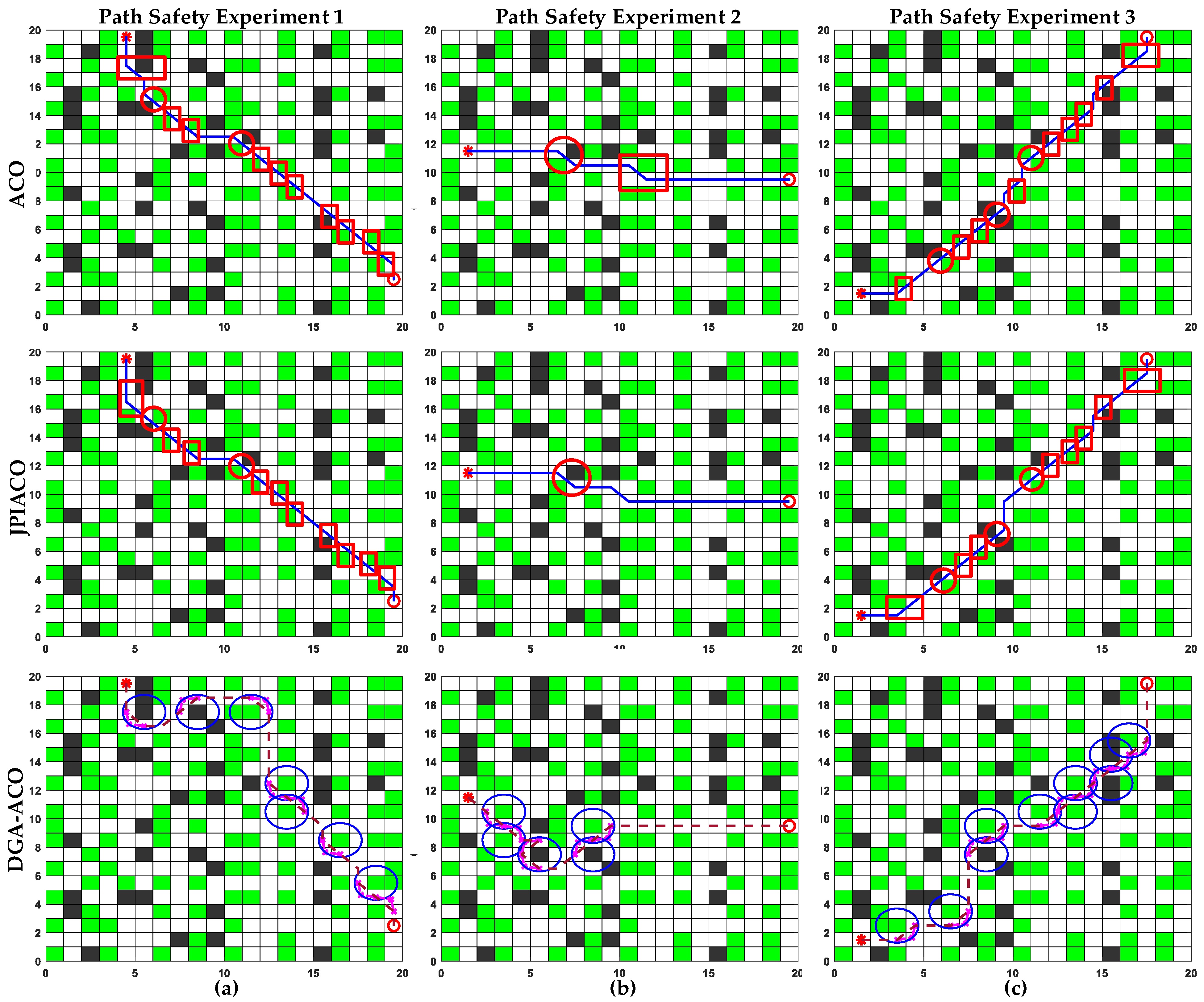
3.3.2. Safety Experiments on an Optimized Path
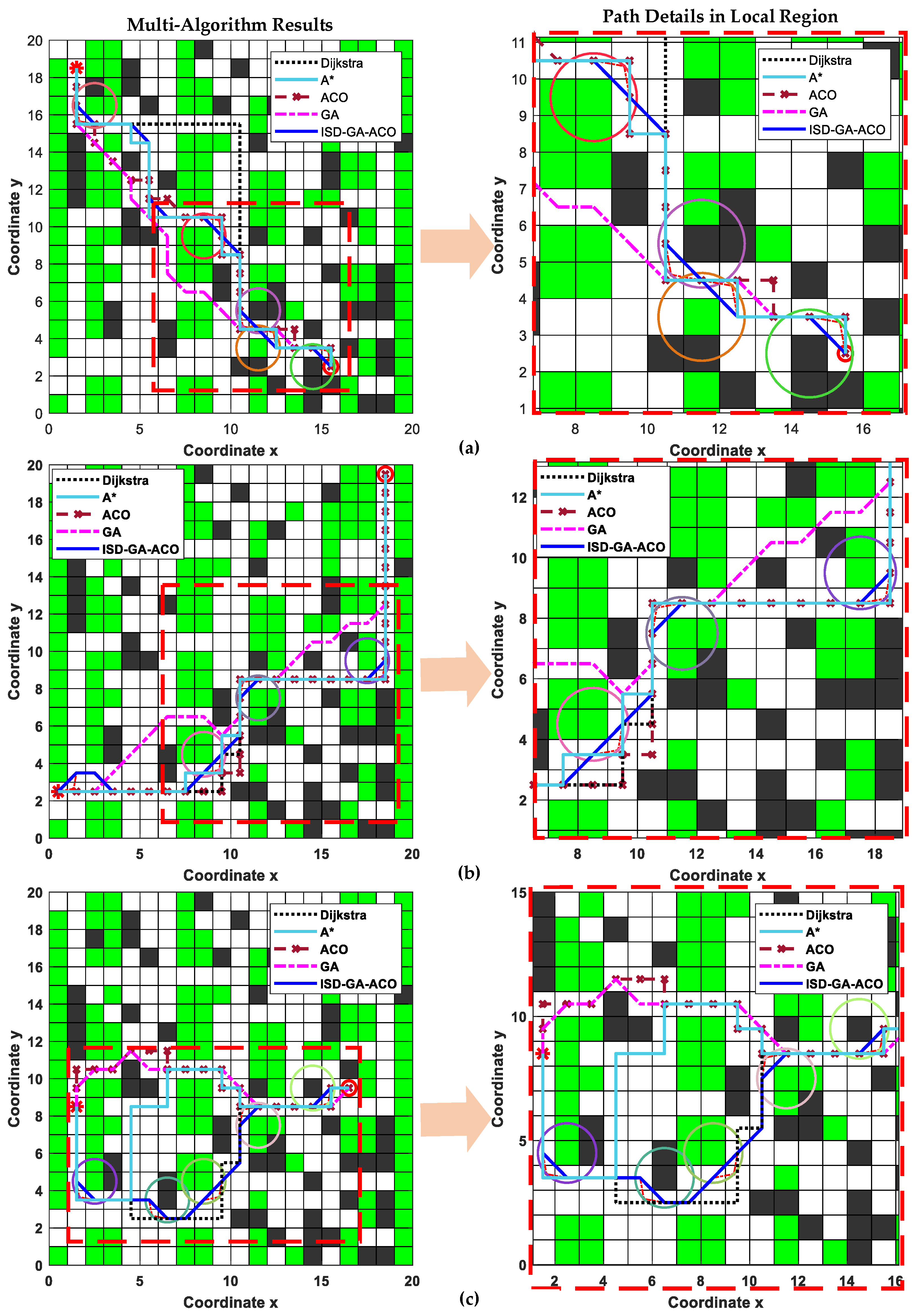
3.4. Comparative Experiments of Multiple Algorithms in Agricultural Environments
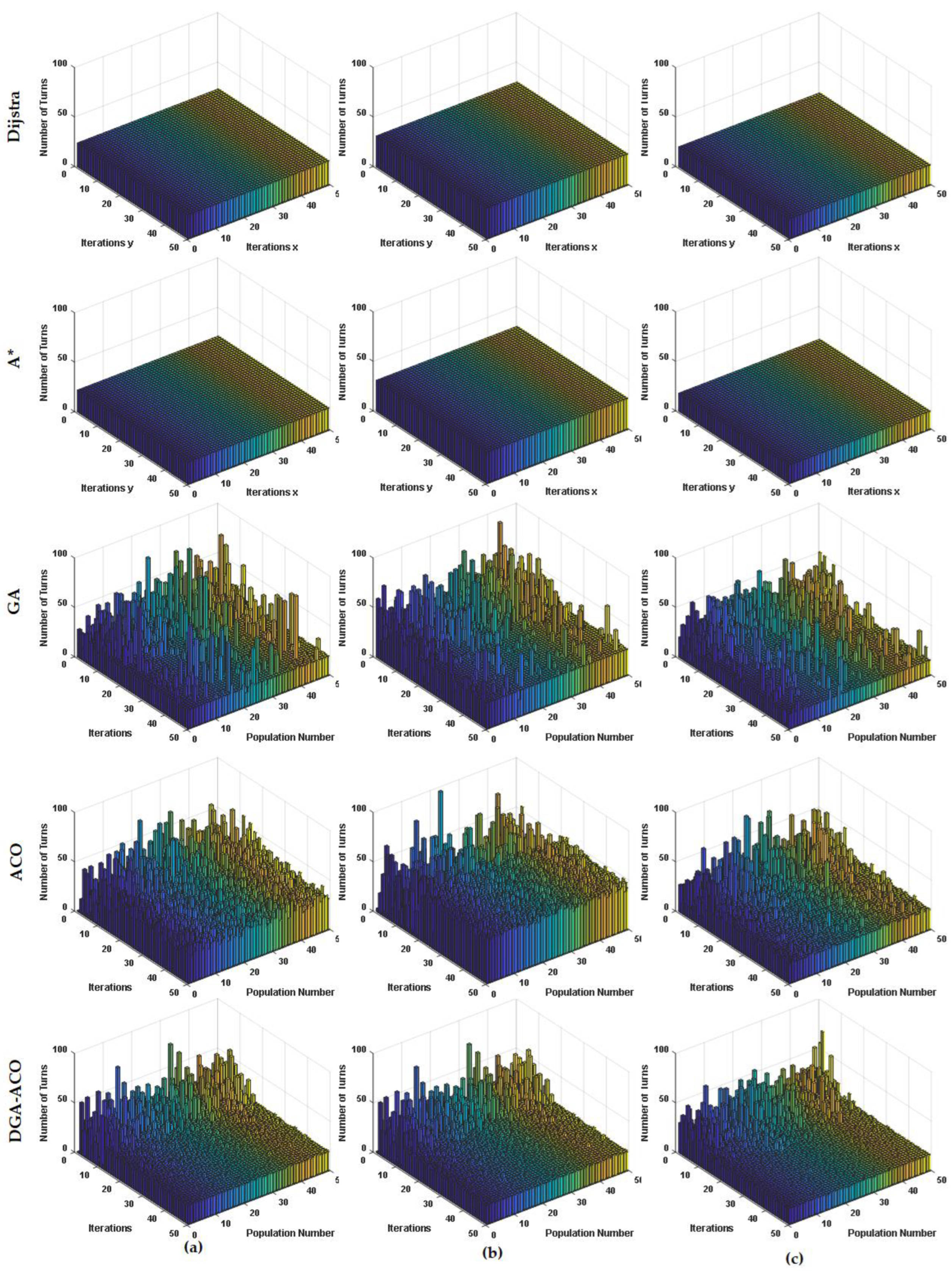
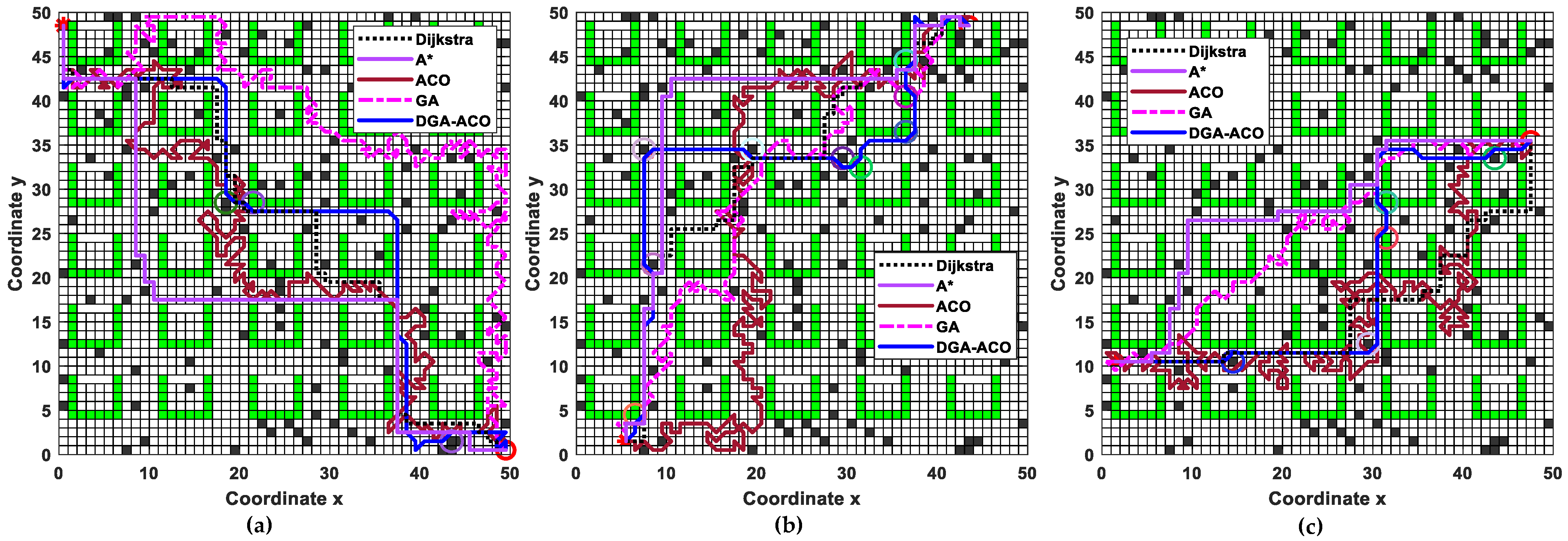
3.4.1. Algorithm Comparison on Agricultural Maps with Straight Corridor Segments
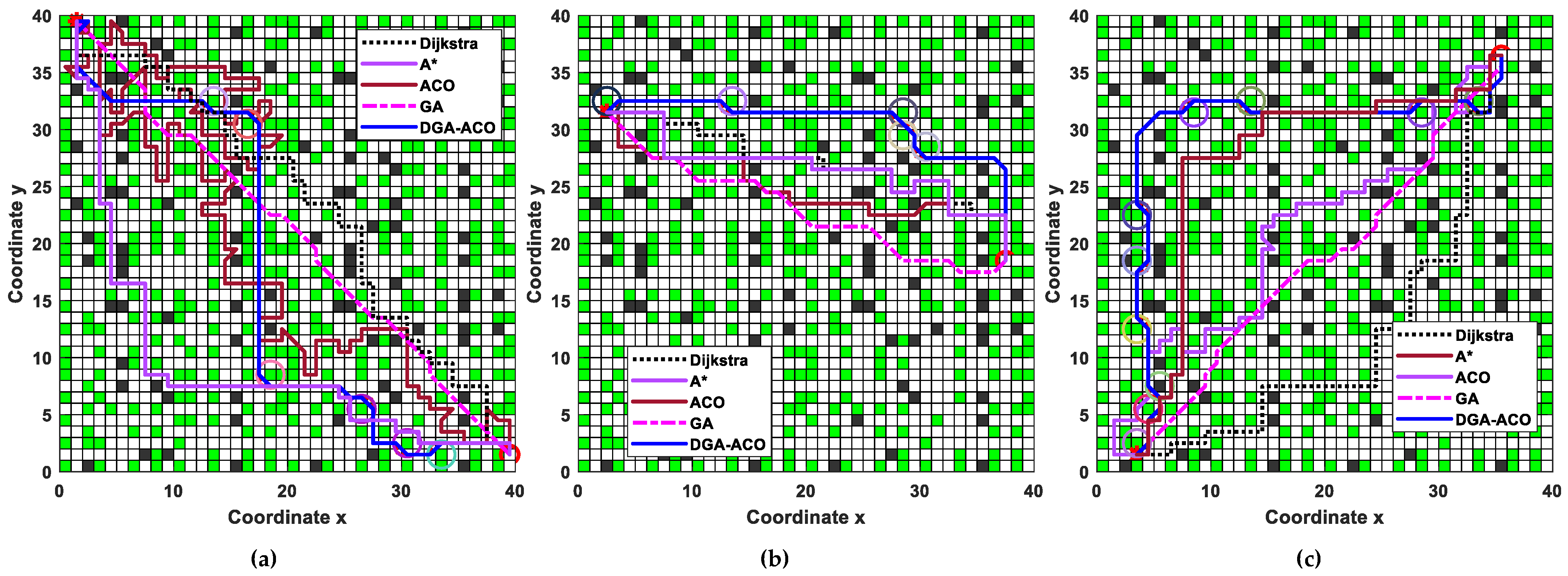
3.4.2. Algorithm Comparison on Agricultural Maps with Scattered Obstacles
3.4.3. Algorithm Comparison on Agricultural Maps with U-Shaped Obstacles
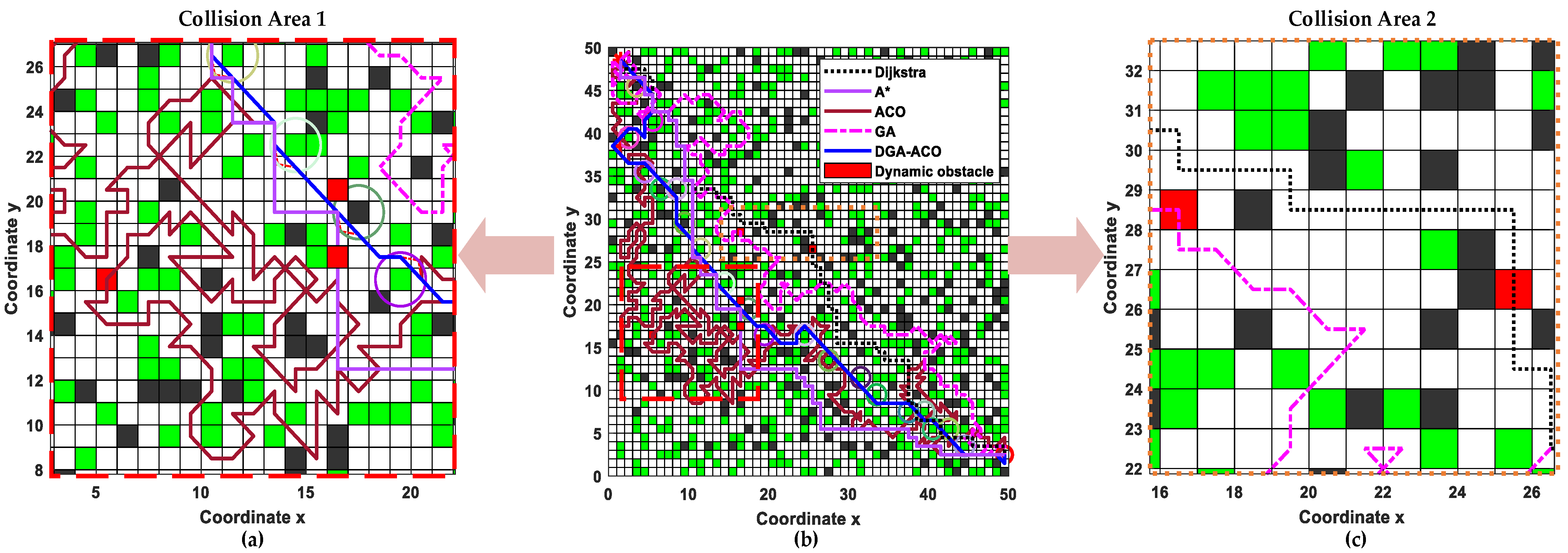
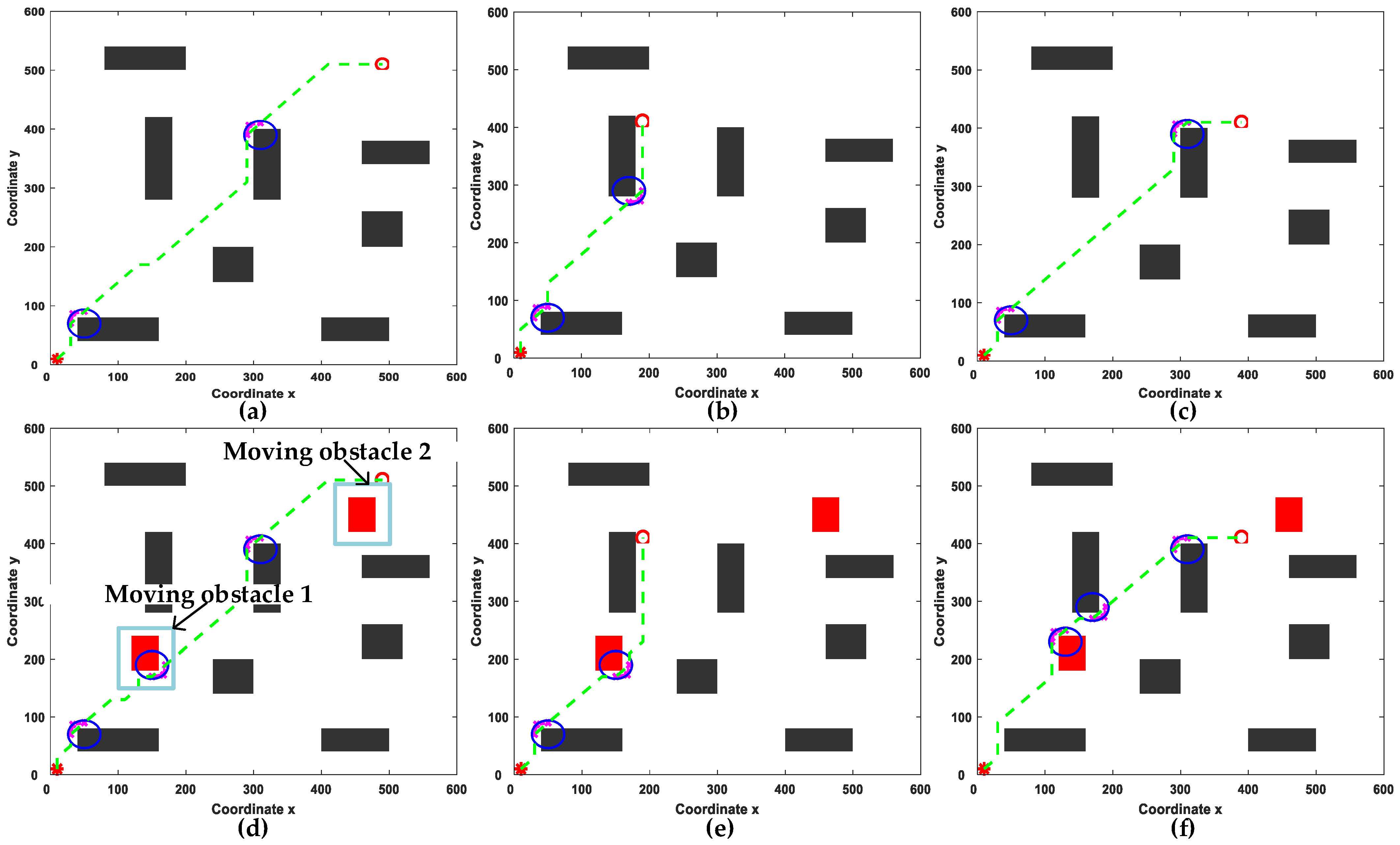
3.4.4. Algorithm Comparison on Agricultural Maps with Dynamic Obstacles
3.5. Algorithm Comparison in Other Environments
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chakraborty, S.; Elangovan, D.; Govindarajan, P.L.; ELnaggar, M.F.; Alrashed, M.M.; Kamel, S. A Comprehensive Review of Path Planning for Agricultural Ground Robots. Sustainability 2022, 14, 9156. [Google Scholar] [CrossRef]
- Kiani, F.; Seyyedabbasi, A.; Nematzadeh, S.; Candan, F.; Çevik, T.; Anka, F.A.; Randazzo, G.; Lanza, S.; Muzirafuti, A. Adaptive Metaheuristic-Based Methods for Autonomous Robot Path Planning: Sustainable Agricultural Applications. Appl. Sci. 2022, 12, 943. [Google Scholar] [CrossRef]
- Pham, T.H.; Bestaoui, Y.; Mammar, S. Aerial robot coverage path planning approach with concave obstacles in precision agriculture. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linköping, Sweden, 3–5 October 2017; pp. 43–48. [Google Scholar] [CrossRef]
- Hameed, I.A.; Bochtis, D.; Sørensen, C.A. An Optimized Field Coverage Planning Approach for Navigation of Agricultural Robots in Fields Involving Obstacle Areas. Int. J. Adv. Robot. Syst. 2013, 10, 231. [Google Scholar] [CrossRef]
- Pour Arab, D.; Spisser, M.; Essert, C. Complete coverage path planning for wheeled agricultural robots. J. Field Robot. 2023, 40, 1460–1503. [Google Scholar] [CrossRef]
- Pak, J.; Kim, J.; Park, Y.; Son, H.I. Field Evaluation of Path-Planning Algorithms for Autonomous Mobile Robot in Smart Farms. IEEE Access 2022, 10, 60253–60266. [Google Scholar] [CrossRef]
- Lal, R.; Sharda, A.; Prabhakar, P. Optimal multi-robot path planning for pesticide spraying in agricultural fields. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 5815–5820. [Google Scholar] [CrossRef]
- Santos, L.C.; Santos, F.N.; Pires, E.J.S.; Valente, A.; Costa, P.; Magalhães, S. Path Planning for ground robots in agriculture: A short review. In Proceedings of the 2020 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Ponta Delgada, Portugal, 15–17 April 2020; pp. 61–66. [Google Scholar] [CrossRef]
- Noguchi, N.; Terao, H. Path planning of an agricultural mobile robot by neural network and genetic algorithm. Comput. Electron. Agric. 1997, 18, 187–204. [Google Scholar] [CrossRef]
- Yang, J.; Ni, J.; Li, Y.; Wen, J.; Chen, D. The Intelligent Path Planning System of Agricultural Robot via Reinforcement Learning. Sensors 2022, 22, 4316. [Google Scholar] [CrossRef]
- Zhang, L.; Li, R.; Li, Z.; Meng, Y.; Liang, J.; Fu, L.; Jin, X.; Li, S. A Quadratic Traversal Algorithm of Shortest Weeding Path Planning for Agricultural Mobile Robots in Cornfield. J. Robot. 2021, 2021, 6633139. [Google Scholar] [CrossRef]
- Hu, Y.; Yang, S.X. A knowledge based genetic algorithm for path planning of a mobile robot. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; Volume 5, pp. 4350–4355. [Google Scholar] [CrossRef]
- Tu, J.; Yang, S.X. Genetic algorithm based path planning for a mobile robot. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 1221–1226. [Google Scholar] [CrossRef]
- Nagib, G.; Gharieb, W. Path planning for a mobile robot using genetic algorithms. In Proceedings of the 2004 International Conference on Electrical, Electronic and Computer Engineering, Cairo, Egypt, 5–7 September 2004; pp. 185–189. [Google Scholar] [CrossRef]
- Song, B.; Wang, Z.; Sheng, L. A new genetic algorithm approach to smooth path planning for mobile robots. Assem. Autom. 2016, 36, 138–145. [Google Scholar] [CrossRef]
- Chen, H.; Xu, Z. Path Planning Based on A New Genetic Algorithm. In Proceedings of the 2005 International Conference on Neural Networks and Brain, Beijing, China, 13–15 October 2005; Volume 2, pp. 788–792. [Google Scholar] [CrossRef]
- Li, Y.; Huang, Z.; Xie, Y. Path planning of mobile robot based on improved genetic algorithm. In Proceedings of the 2020 3rd International Conference on Electron Device and Mechanical Engineering (ICEDME), Suzhou, China, 1–3 May 2020; pp. 691–695. [Google Scholar] [CrossRef]
- Benavides, F.; Tejera, G.; Pedemonte, M.; Casella, S. Real path planning based on genetic algorithm and Voronoi diagrams. In Proceedings of the 2011 IEEE IX Latin American Robotics Symposium and IEEE Colombian Conference on Automatic Control, Bogota, Colombia, 1–4 October 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Ma, J.; Liu, Y.; Zang, S.; Wang, L. Robot Path Planning Based on Genetic Algorithm Fused with Continuous Bezier Optimization. Comput. Intell. Neurosci. 2020, 2020, 9813040. [Google Scholar] [CrossRef]
- Xin, D.; Hua-hua, C.; Wei-kang, G. Neural network and genetic algorithm based global path planning in a static environment. J. Zhejiang Univ. Sci. A 2005, 6, 549–554. [Google Scholar] [CrossRef]
- Zeng, C.; Zhang, Q.; Wei, X. Robotic Global Path-Planning Based Modified Genetic Algorithm and A* Algorithm. In Proceedings of the 2011 Third International Conference on Measuring Technology and Mechatronics Automation, Shanghai, China, 6–7 January 2011; Volume 3, pp. 167–170. [Google Scholar] [CrossRef]
- Chen, X.; Kong, Y.; Fang, X.; Wu, Q. A fast two-stage ACO algorithm for robotic path planning. Neural Comput. Appl. 2013, 22, 313–319. [Google Scholar] [CrossRef]
- Yen, C.-T.; Cheng, M.-F. A study of fuzzy control with ant colony algorithm used in mobile robot for shortest path planning and obstacle avoidance. Microsyst. Technol. 2018, 24, 125–135. [Google Scholar] [CrossRef]
- Liu, J.; Yang, J.; Liu, H.; Tian, X.; Gao, M. An improved ant colony algorithm for robot path planning. Soft Comput. 2017, 21, 5829–5839. [Google Scholar] [CrossRef]
- Wu, L.; Huang, X.; Cui, J.; Liu, C.; Xiao, W. Modified adaptive ant colony optimization algorithm and its application for solving path planning of mobile robot. Expert Syst. Appl. 2023, 215, 119410. [Google Scholar] [CrossRef]
- Cui, J.; Wu, L.; Huang, X.; Xu, D.; Liu, C.; Xiao, W. Multi-strategy adaptable ant colony optimization algorithm and its application in robot path planning. Knowl. Based Syst. 2024, 288, 111459. [Google Scholar] [CrossRef]
- Oleiwi, B.K.; Roth, H.; Kazem, B.I. A Hybrid Approach Based on ACO and Ga for Multi Objective Mobile Robot Path Planning. Appl. Mech. Mater. 2014, 527, 203–212. [Google Scholar] [CrossRef]
- Li, G.; Liu, C.; Wu, L.; Xiao, W. A mixing algorithm of ACO and ABC for solving path planning of mobile robot. Appl. Soft Comput. 2023, 148, 110868. [Google Scholar] [CrossRef]
- Cai, Z.; Liu, J.; Xu, L.; Wang, J. Cooperative path planning study of distributed multi-mobile robots based on optimised ACO algorithm. Robot. Auton. Syst. 2024, 179, 104748. [Google Scholar] [CrossRef]
- Châari, I.; Koubâa, A.; Bennaceur, H.; Trigui, S.; Al-Shalfan, K. smartPATH: A hybrid ACO-GA algorithm for robot path planning. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation, Brisbane, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Tang, Y.; Zakaria, M.A.; Younas, M. Path Planning Trends for Autonomous Mobile Robot Navigation: A Review. Sensors 2025, 25, 1206. [Google Scholar] [CrossRef]
- Nasrinahar, A.; Chuah, J.H. Intelligent motion planning of a mobile robot with dynamic obstacle avoidance. J. Veh. Routing Algorithms 2018, 1, 89–104. [Google Scholar] [CrossRef]
- Gao, X.; Yan, L.; Li, Z.; Wang, G.; Chen, I.M. Improved deep deterministic policy gradient for dynamic obstacle avoidance of mobile robot. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 3675–3682. [Google Scholar] [CrossRef]
- Dong, H.; Weng, C.Y.; Guo, C.; Yu, H.; Chen, I.M. Real-time avoidance strategy of dynamic obstacles via half model-free detection and tracking with 2d lidar for mobile robots. IEEE/ASME Trans. Mechatron. 2020, 26, 2215–2225. [Google Scholar] [CrossRef]
- Lee, D.H.; Lee, S.S.; Ahn, C.K.; Shi, P.; Lim, C.C. Finite distribution estimation-based dynamic window approach to reliable obstacle avoidance of mobile robot. IEEE Trans. Ind. Electron. 2020, 68, 9998–10006. [Google Scholar] [CrossRef]
- Chen, T.; Chen, S.; Zhang, K.; Qiu, G.; Li, Q.; Chen, X. A jump point search improved ant colony hybrid optimization algorithm for path planning of mobile robot. Int. J. Adv. Robot. Syst. 2022, 19, 17298806221127953. [Google Scholar] [CrossRef]
- Tao, Y.; Gao, H.; Ren, F.; Chen, C.; Wang, T.; Xiong, H.; Jiang, S. A mobile service robot global path planning method based on ant colony optimization and fuzzy control. Appl. Sci. 2021, 11, 3605. [Google Scholar] [CrossRef]
- Baum, L.E.; Petrie, T. Statistical Inference for Probabilistic Functions of Finite State Markov Chains. Ann. Math. Stat. 1966, 37, 1554–1563. [Google Scholar] [CrossRef]
- Tadayon, M.; Pottie, G. Comparative analysis of the hidden Markov model and LSTM: A simulative approach. arXiv 2020, arXiv:2008.03825. [Google Scholar]
- Ali, H.; Gong, D.; Wang, M.; Dai, X. Path planning of mobile robot with improved ant colony algorithm and MDP to produce smooth trajectory in grid-based environment. Front. Neurorobot. 2020, 14, 44. [Google Scholar] [CrossRef]
- Zhang, Y.; Dong, B.; Zhang, L.; Liu, J.; Han, H. Global path planning for mobile robots based on improved A-Star algorithm. Research Square 2024. [Google Scholar] [CrossRef]
- Bennewitz, M.; Burgard, W.; Cielniak, G.; Thrun, S. Learning motion patterns of people for compliant robot motion. Int. J. Robot. Res. 2005, 24, 31–48. [Google Scholar] [CrossRef]
- Wu, X.; Bai, J.; Hao, F.; Cheng, G.; Tang, Y.; Li, X. Field Complete Coverage Path Planning Based on Improved Genetic Algorithm for Transplanting Robot. Machines 2023, 11, 659. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Algorithm | Ref. | Parameter Values |
|---|---|---|---|
| 1 | ACO | [22] | K = 20, M = 50, , , , , , , |
| 2 | ACO | [27] | K = 10, M = 10, , , , |
| 3 | GA | [27] | = 0.25 |
| 4 | ACO | [28] | K = 2, M = 10, , , , |
| 5 | IACO-IABC | [28] | K = 100, M = 50, , , , |
| 6 | ACO | [30] | K = 30, M = 10, , , , 00, |
| 7 | JPIACO | [36] | K = 50, M = 30, , , , , |
| 8 | DGA-ACO | - | K = 50, M = 50, , , , , |
| Map Size: 20 × 20 | Algorithom | |||
|---|---|---|---|---|
| ACO | JPIACO [36] | DGA-ACO | ||
| Path safety Experiment 1 | Optimal path length | 23.14 | 22.72 | 29.55 |
| Number of turns | 6 | 4 | 11 | |
| Minimum iteration | 7 | 1 | 1 | |
| Path safety Experiment 2 | Optimal path length | 17.13 | 18.82 | 21.90 |
| Number of turns | 4 | 4 | 5 | |
| Minimum iteration | 24 | 12 | 9 | |
| Path safety Experiment 3 | Optimal path length | 26.23 | 25.80 | 28.14 |
| Number of turns | 8 | 6 | 15 | |
| Minimum iteration | 13 | 9 | 3 | |
| Experiment | Map Size | Sart/End | Obstacle Coverage | Experiment Params |
|---|---|---|---|---|
| a | 20 × 20 | (1.5,18.5)/(15.5,2.5) | 47.25% | param3, param4, param8 |
| b | (0.5,2.5)/(18.5,19.5) | param3, param5, param8 | ||
| c | (1.5,8.5)/(16.5,9.5) | param3, param6, param8 |
| Map Size: 40 × 40 | Algorithom | |||||
|---|---|---|---|---|---|---|
| Dijkstra | A* | ACO | GA | DGA-ACO | ||
| Start (1.5,39.5) End (39.5,1.5) | convergentNSP | 50 | 50 | 46 | 48 | 50 |
| OPL | 69 | 60 | 75.71 | 66.64 | 58.58 | |
| APL | 69 | 60 | 78.97 | 69.19 | 59.92 | |
| PLV | 0 | 0 | 9 | 6 | 3 | |
| NT | 28 | 20 | 112 | 12 | 16 | |
| NNS | 0 | 0 | 0 | 6 | 0 | |
| NDHA | 0 | 0 | 14 | 21 | 0 | |
| Start (2.5,31.5) End (37.5,18.5) | convergentNSP | 50 | 50 | 33 | 49 | 50 |
| OPL | 43 | 40 | 46.60 | 49.37 | 39.21 | |
| APL | 43 | 40 | 49.27 | 52.69 | 40.51 | |
| PLV | 0 | 0 | 8 | 10 | 1 | |
| NT | 17 | 11 | 17 | 12 | 8 | |
| NNS | 0 | 0 | 3 | 2 | 0 | |
| NDHA | 0 | 0 | 1 | 5 | 0 | |
| Start (3.5,1.5) End (36.5,36.5) | convergentNSP | 50 | 50 | 46 | 48 | 50 |
| OPL | 64.21 | 58.35 | 61.71 | 66.64 | 53.62 | |
| APL | 69.34 | 58.23 | 60.75 | 66.27 | 53.22 | |
| PLV | 0 | 0 | 7 | 8 | 4 | |
| NT | 18 | 21 | 40 | 12 | 25 | |
| NNS | 0 | 0 | 3 | 5 | 0 | |
| NDHA | 0 | 0 | 2 | 12 | 0 | |
| Map Size: 50 × 50 | Algorithom | |||||
|---|---|---|---|---|---|---|
| Dijkstra | A* | ACO | GA | DGA-ACO | ||
| Start (0.5,48.5) End (49.5,0.5) | convergentNSP | 50 | 50 | 27 | 33 | 50 |
| OPL | 102 | 102 | 155.67 | 138.23 | 90.59 | |
| APL | 102 | 102 | 156.19 | 138.55 | 90.72 | |
| PLV | 0 | 0 | 20 | 17 | 6 | |
| NT | 18 | 11 | 133 | 109 | 20 | |
| NNS | 0 | 0 | 1 | 2 | 0 | |
| NDHA | 0 | 0 | 6 | 7 | 0 | |
| Start (5.5,1.5) End (43.5,48.5) | convergentNSP | 50 | 50 | 29 | 36 | 50 |
| OPL | 92 | 90 | 139.66 | 117.64 | 83.52 | |
| APL | 92 | 90 | 139.46 | 117.27 | 83.33 | |
| PLV | 0 | 0 | 18 | 15 | 4 | |
| NT | 25 | 17 | 114 | 63 | 8 | |
| NNS | 0 | 0 | 1 | 1 | 0 | |
| NDHA | 0 | 0 | 4 | 9 | 0 | |
| Start (1.5,10.5) End (47.5,35.5) | convergentNSP | 50 | 50 | 37 | 42 | 50 |
| OPL | 84 | 88 | 112.45 | 107.23 | 87.62 | |
| APL | 84 | 88 | 112.46 | 107.59 | 86.22 | |
| PLV | 0 | 0 | 10 | 7 | 2 | |
| NT | 14 | 17 | 147 | 46 | 8 | |
| NNS | 0 | 0 | 0 | 1 | 0 | |
| NDHA | 0 | 0 | 7 | 12 | 0 | |
| Map Size: 600 × 600 | Algorithom | ||
|---|---|---|---|
| R-SAC [10] | DGA-ACO | ||
| Static Environment Experiment 1: Target (500,500) | Steps | 171 | 153 |
| Path Length | 860.87 | 757.40 | |
| Static Environment Experiment 2: Target (200,400) | Steps | 128 | 117 |
| Path Length | 643.94 | 474.558 | |
| Static Environment Experiment 3: Target (400,400) | Steps | 142 | 138 |
| Path Length | 715.78 | 600.21 | |
| Dynamic Environment Experiment 1: Target (500,500) | Steps | 159 | 137 |
| Path Length | 800.17 | 769.12 | |
| Dynamic Environment Experiment 2: Target (200,400) | Steps | 132 | 129 |
| Path Length | 665.36 | 486.27 | |
| Dynamic Environment Experiment 3: Target (400,400) | Steps | 145 | 143 |
| Path Length | 732.95 | 615.98 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Li, P.; Chai, S.; Cui, Y.; Tian, Y. DGA-ACO: Enhanced Dynamic Genetic Algorithm—Ant Colony Optimization Path Planning for Agribots. Agriculture 2025, 15, 1321. https://doi.org/10.3390/agriculture15121321
Zhang Z, Li P, Chai S, Cui Y, Tian Y. DGA-ACO: Enhanced Dynamic Genetic Algorithm—Ant Colony Optimization Path Planning for Agribots. Agriculture. 2025; 15(12):1321. https://doi.org/10.3390/agriculture15121321
Chicago/Turabian StyleZhang, Zhenpeng, Pengyu Li, Shanglei Chai, Yukang Cui, and Yibin Tian. 2025. "DGA-ACO: Enhanced Dynamic Genetic Algorithm—Ant Colony Optimization Path Planning for Agribots" Agriculture 15, no. 12: 1321. https://doi.org/10.3390/agriculture15121321
APA StyleZhang, Z., Li, P., Chai, S., Cui, Y., & Tian, Y. (2025). DGA-ACO: Enhanced Dynamic Genetic Algorithm—Ant Colony Optimization Path Planning for Agribots. Agriculture, 15(12), 1321. https://doi.org/10.3390/agriculture15121321