
Automation of Rice Transplanter Using Agricultural Navigation



Abstract
1. Introduction
2. Materials and Methods
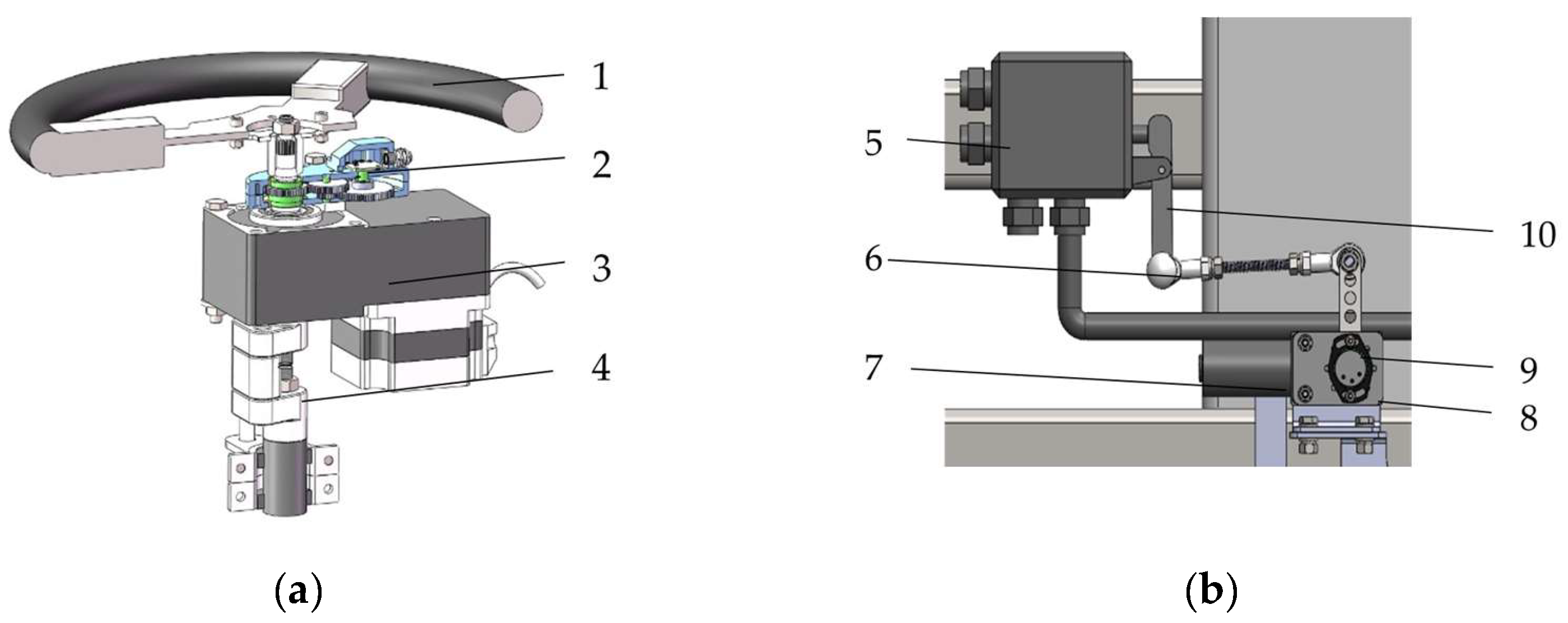
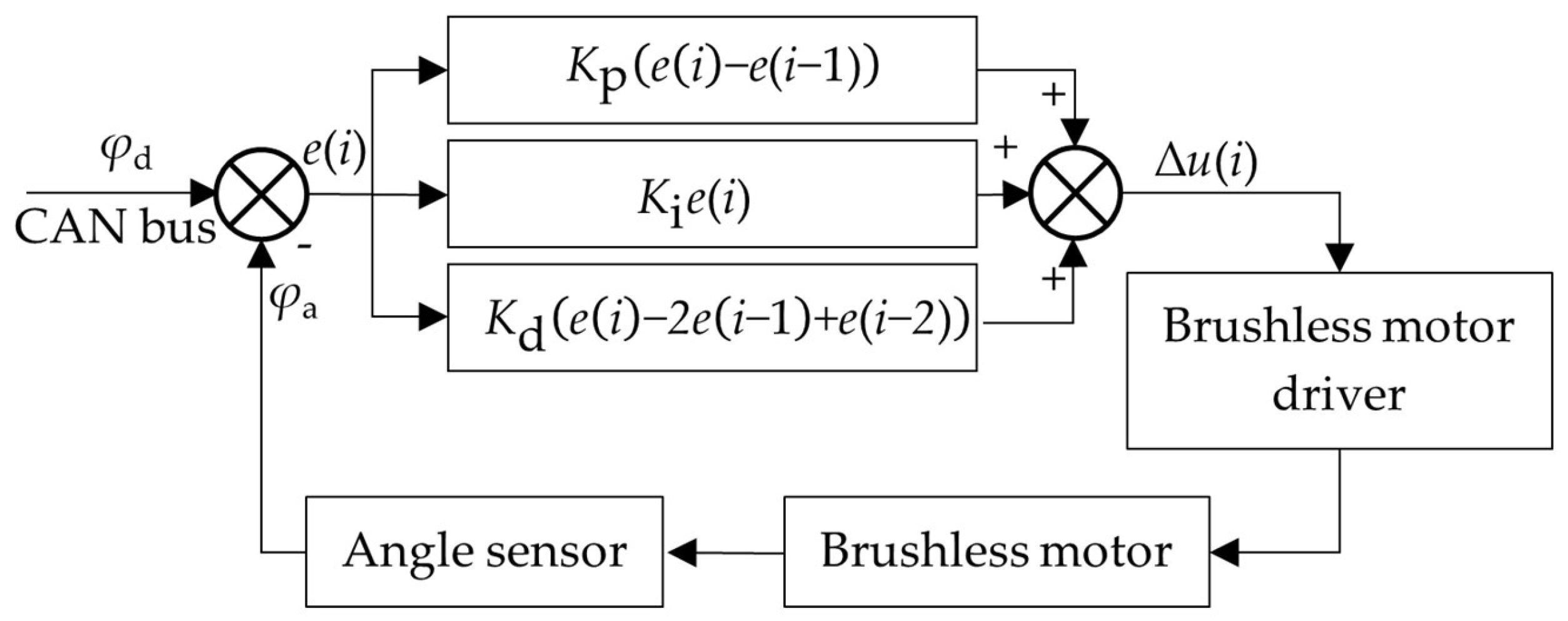
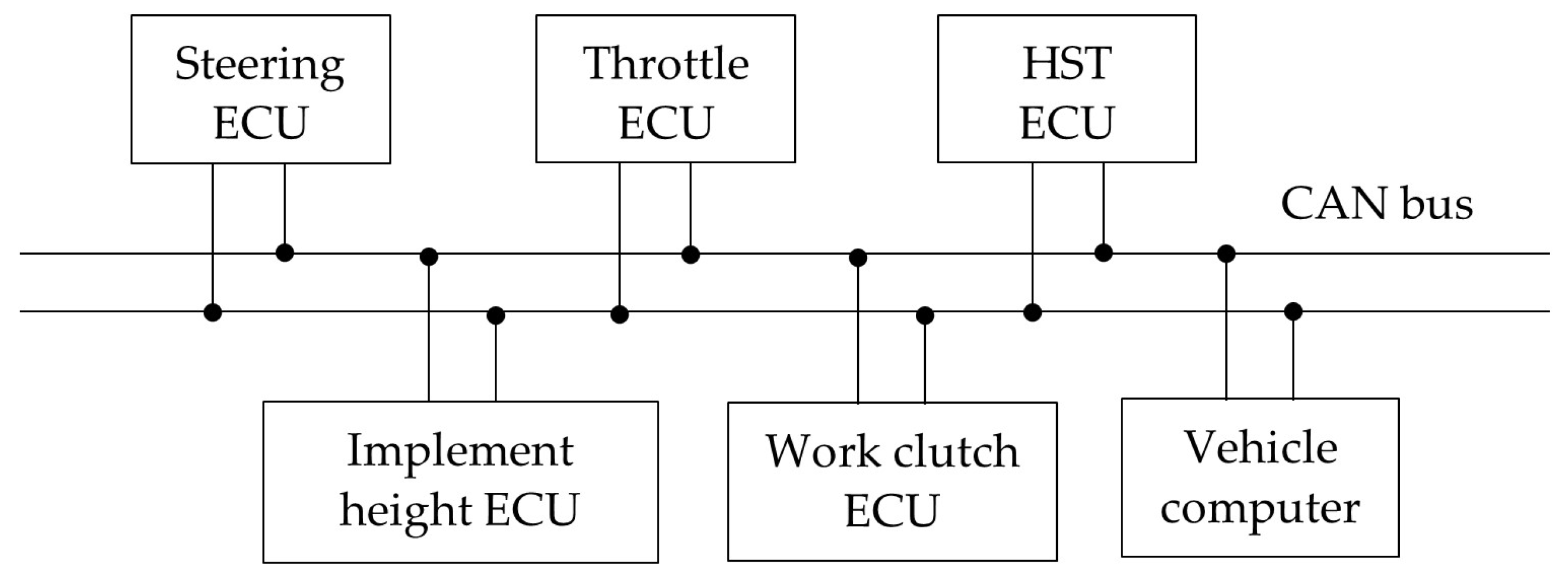
2.1. Realization of Automatic Operation
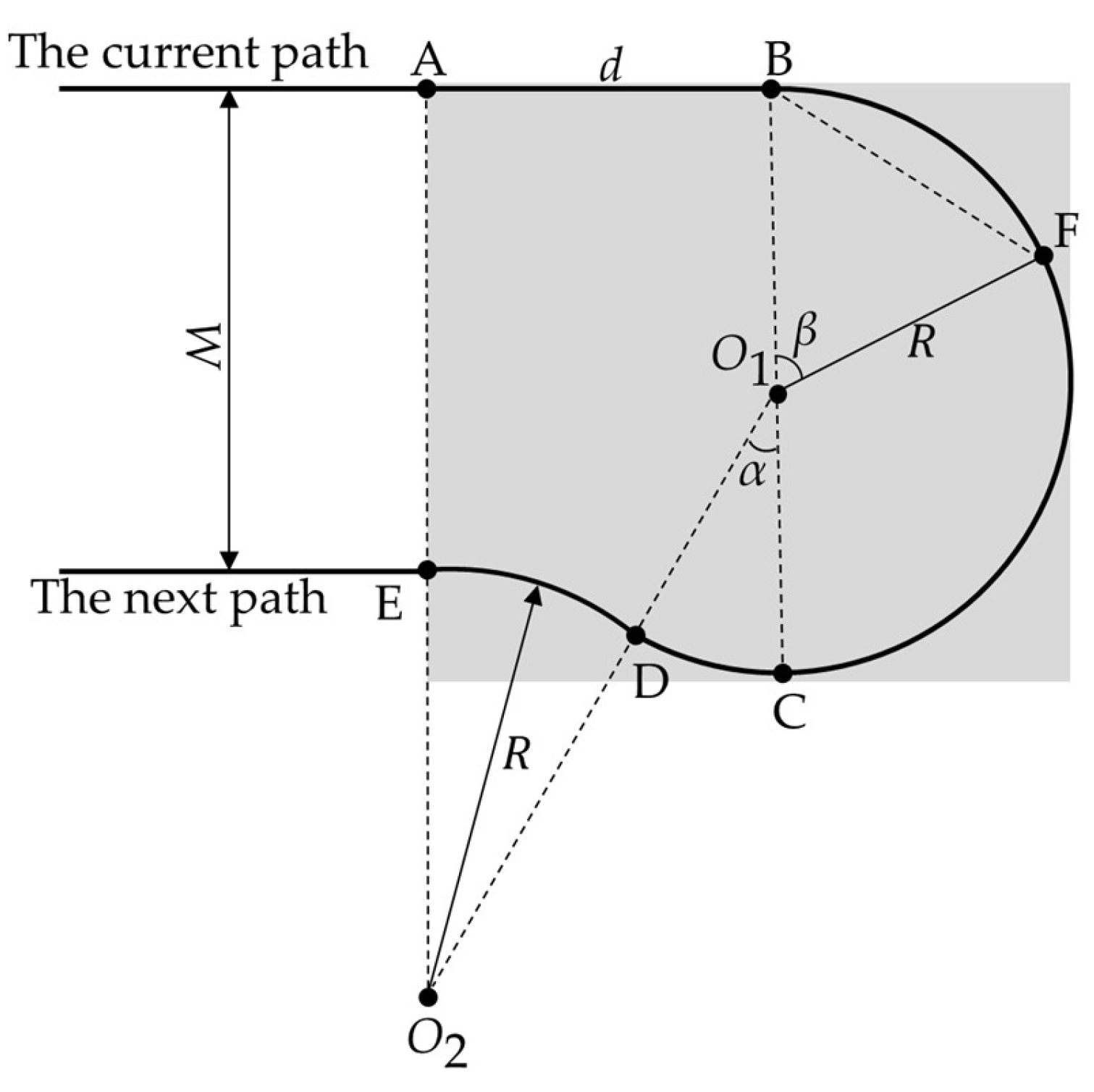
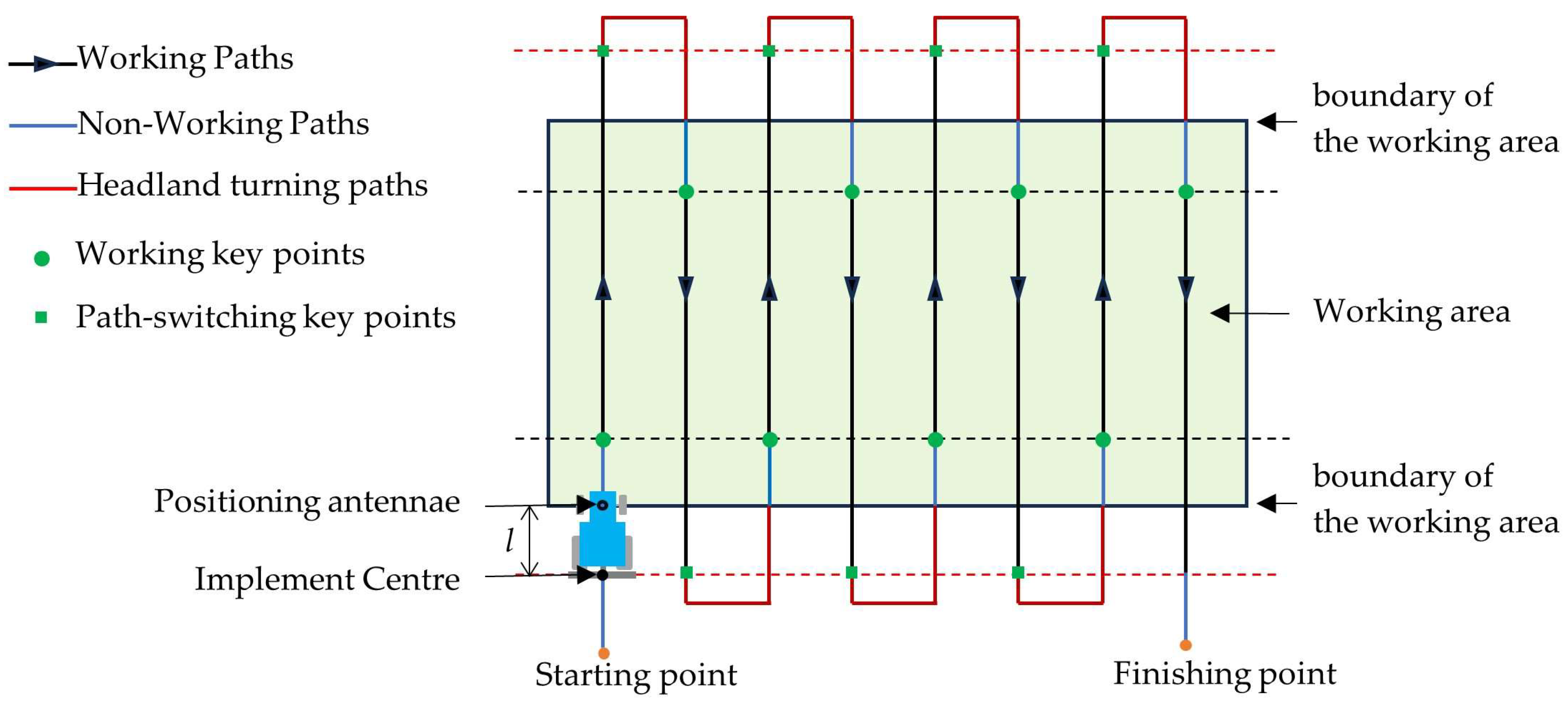
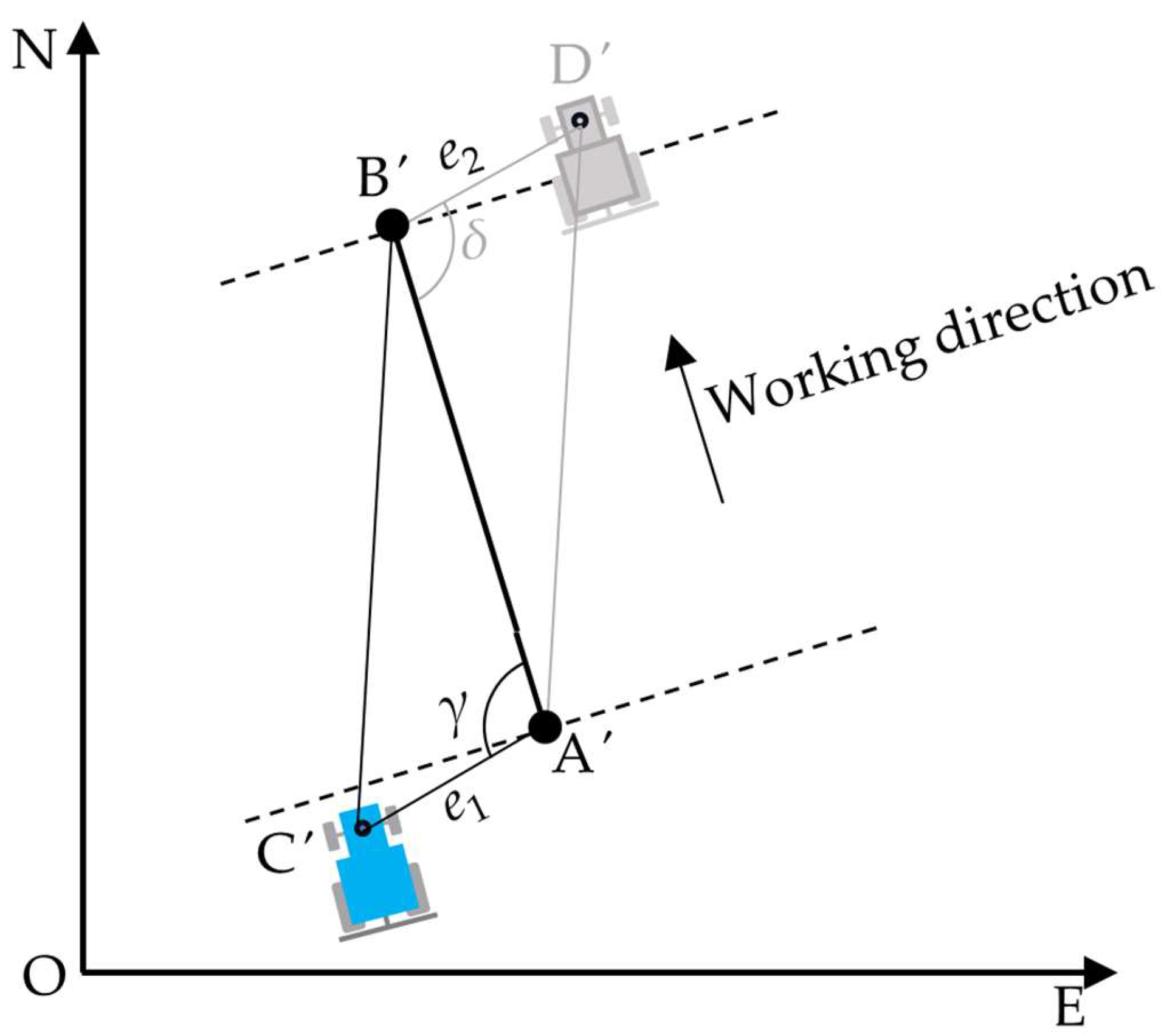
2.2. Path Planning
2.3. An Operational Control Strategy Based on the FSM
3. Results and Discussion
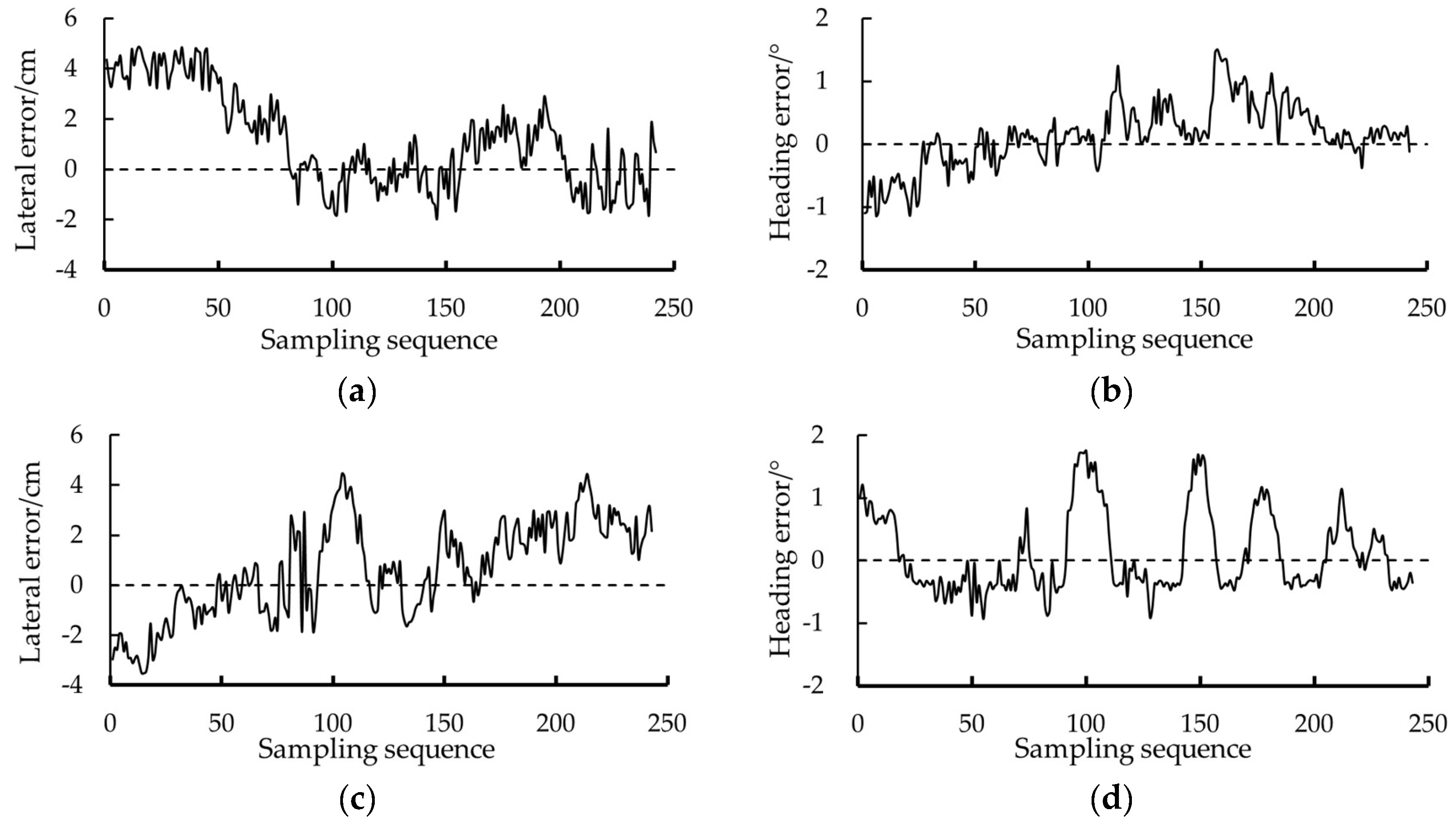
3.1. Navigation Performance Evaluation on the Cement Pavement
3.2. Navigation Performance Evaluation in the Field
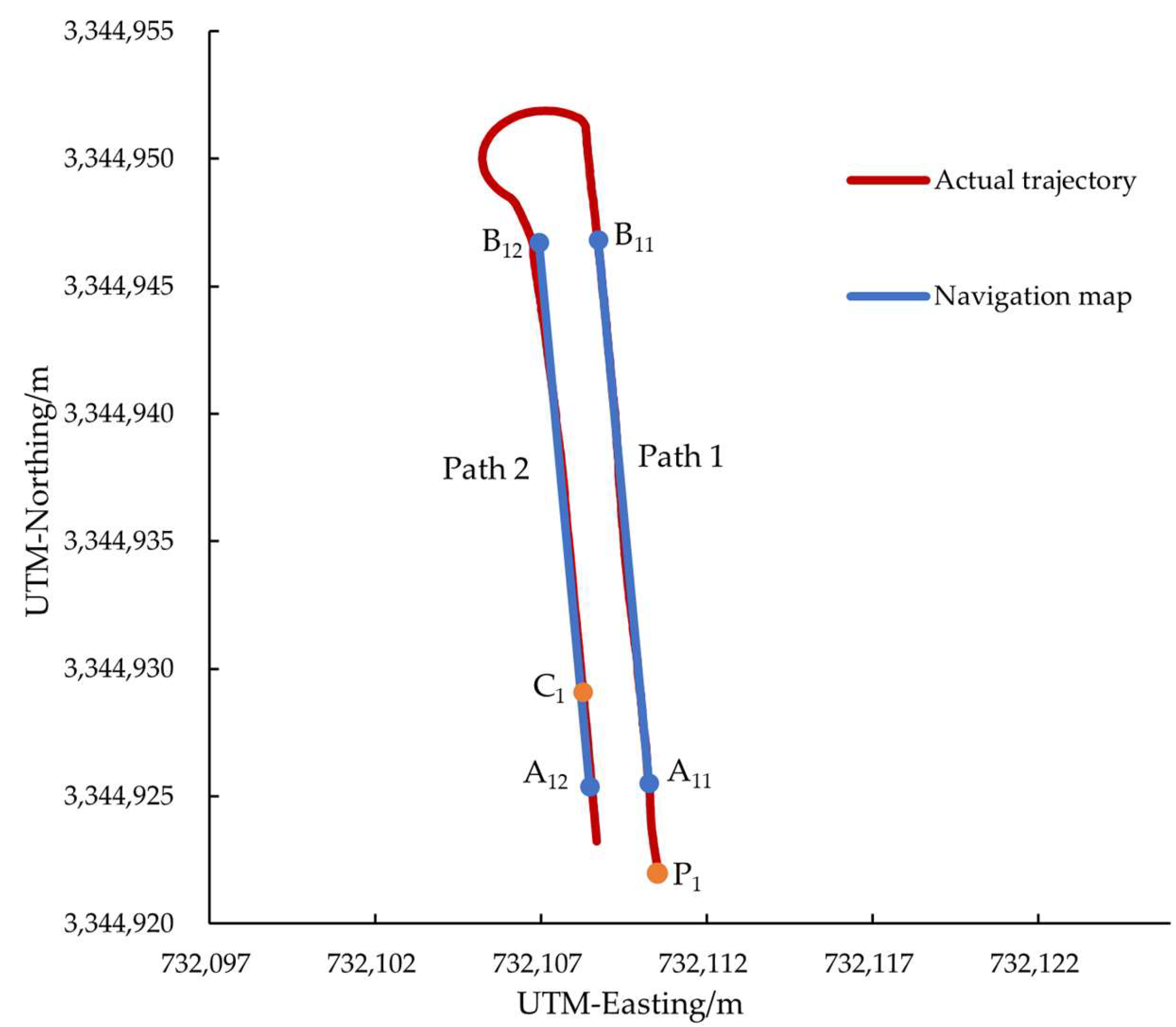
3.2.1. Evaluation of Straight-Line Path Navigation
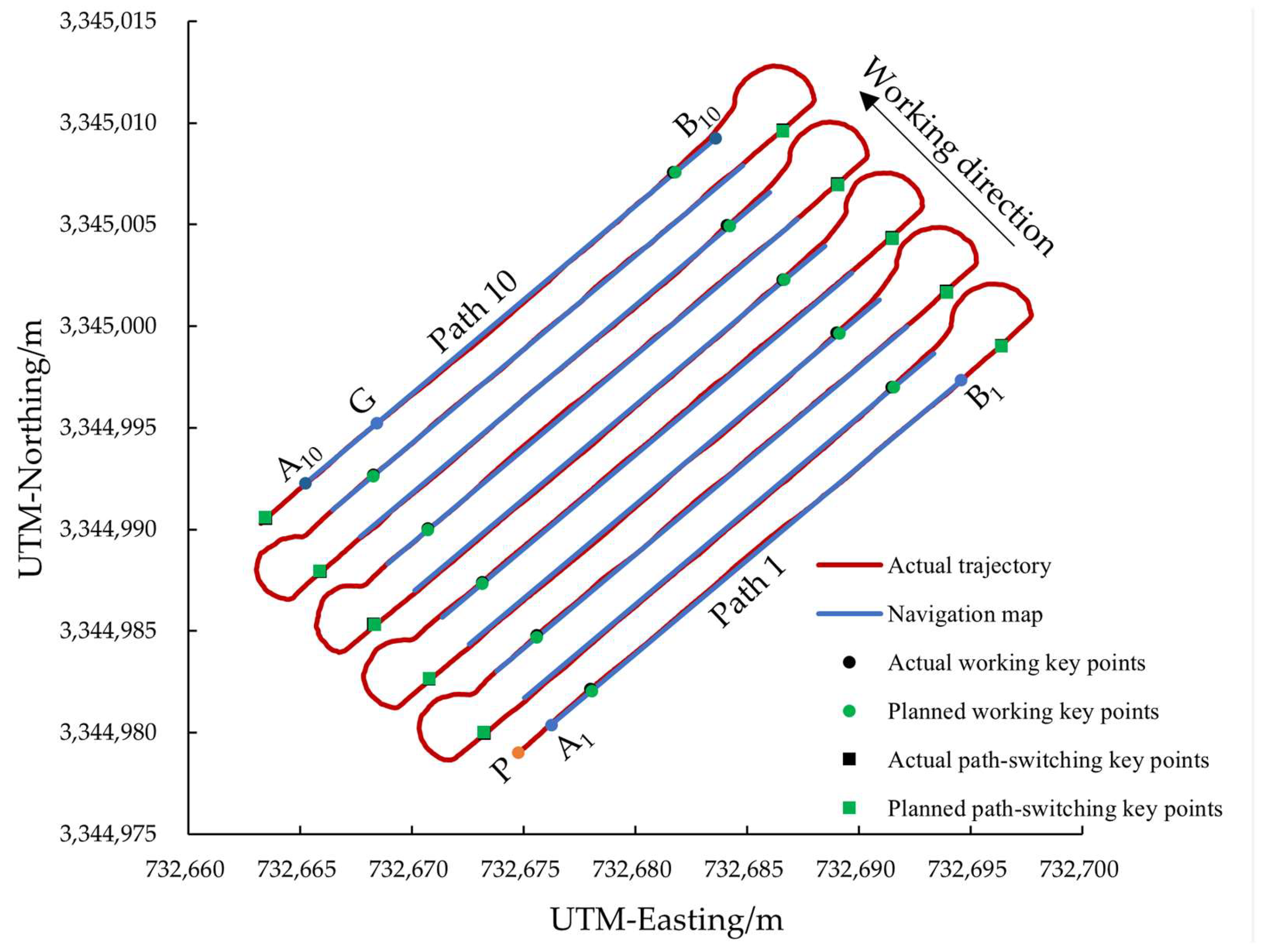
3.2.2. Evaluation of Key Points Determination
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, D.; Qi, H.; Guo, X.; Sun, H.; Min, J.; Li, S.; Hou, L.; Lv, L. Integration of UAV Multispectral Remote Sensing and Random Forest for Full-Growth Stage Monitoring of Wheat Dynamics. Agriculture 2025, 15, 353. [Google Scholar] [CrossRef]
- Cui, B.; Cui, X.; Wei, X.; Zhu, Y.; Ma, Z.; Zhao, Y.; Liu, Y. Design and Testing of a Tractor Automatic Navigation System Based on Dynamic Path Search and a Fuzzy Stanley Model. Agriculture 2024, 14, 2136. [Google Scholar] [CrossRef]
- Chai, S.; Wen, M.; Li, P.; Zeng, Z.; Tian, Y. DCFA-YOLO: A Dual-Channel Cross-Feature-Fusion Attention YOLO Network for Cherry Tomato Bunch Detection. Agriculture 2025, 15, 271. [Google Scholar] [CrossRef]
- Lei, G.; Zhou, S.; Zhang, P.; Xie, F.; Gao, Z.; Shuang, L.; Xue, Y.; Fan, E.; Xin, Z. Stability Control of the Agricultural Tractor-Trailer System in Saline Alkali Land: A Collaborative Trajectory Planning Approach. Agriculture 2025, 15, 100. [Google Scholar] [CrossRef]
- Ren, H.; Wu, J.; Lin, T.; Yao, Y.; Liu, C. Research on an Intelligent Agricultural Machinery Unmanned Driving System. Agriculture 2023, 13, 1907. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, Y.; Lu, F.; Zhang, D.; Yang, L.; Cui, T.; He, X.; Zhang, K. Design and Experiment of Greenhouse Self-Balancing Mobile Robot Based on PR Joint Sensor. Agriculture 2023, 13, 2040. [Google Scholar] [CrossRef]
- Saha, S.; Morita, T.; Ospina, R.; Noguchi, N. A Vision-Based Navigation System for an Agricultural Autonomous Tractor. IFAC-PapersOnLine 2022, 55, 48–53. [Google Scholar] [CrossRef]
- Utamima, A.; Reiners, T. Navigating Route Planning for Multiple Vehicles in Multifield Agriculture with a Fast Hybrid Algorithm. Comput. Electron. Agric. 2023, 212, 108021. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J.; Shi, Y.; He, Z.; Liu, F.; Kong, W.; He, Y. Unmanned Airboat Technology and Applications in Environment and Agriculture. Comput. Electron. Agric. 2022, 197, 106920. [Google Scholar] [CrossRef]
- Ünal, İ.; Topakci, M. Design of a Remote-Controlled and GPS-Guided Autonomous Robot for Precision Farming. Int. J. Adv. Robot. Syst. 2015, 12, 194. [Google Scholar] [CrossRef]
- Xie, K.; Zhang, Z.; Zhu, S. Enhanced Agricultural Vehicle Positioning through Ultra-Wideband-Assisted Global Navigation Satellite Systems and Bayesian Integration Techniques. Agriculture 2024, 14, 1396. [Google Scholar] [CrossRef]
- Ding, F.; Zhang, W.; Luo, X.; Zhang, Z.; Wang, M.; Li, H.; Peng, M.; Hu, L. Design and Experiment for Inter-Vehicle Communication Based on Dead-Reckoning and Delay Compensation in a Cooperative Harvester and Transport System. Agriculture 2022, 12, 2052. [Google Scholar] [CrossRef]
- Marucci, A.; Colantoni, A.; Zambon, I.; Egidi, G. Precision Farming in Hilly Areas: The Use of Network RTK in GNSS Technology. Agriculture 2017, 7, 60. [Google Scholar] [CrossRef]
- Wang, G.; Han, Y.; Chen, J.; Wang, S.; Zhang, Z.; Du, N.; Zheng, Y. A GNSS/INS Integrated Navigation Algorithm Based on Kalman Filter. IFAC-PapersOnLine 2018, 51, 232–237. [Google Scholar] [CrossRef]
- Aravindvas, V.; Srinivas, U.; Rayudu, M.V.; Subhash, T.; Prashanth, B.N. Design and Development of Sensor Based Automatic Steering Control System for Automobiles. Mater. Today Proc. 2021, 46, 5176–5181. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, G.; Zha, J.; Li, Y.; Zhang, T.; Chen, L. Design of Automatic Steering System Based on Direct Connection of DC Motor and Full Hydraulic Steering Gear. Trans. Chin. Soc. Agric. Mach. 2020, 51, 44–54. [Google Scholar] [CrossRef]
- Bo, H.; Liang, W.; Yuefeng, D.; Zhenghe, S.; Enrong, M.; Zhongxiang, Z. Design and Experiment on Integrated Proportional Control Valve of Automatic Steering System. IFAC-PapersOnLine 2018, 51, 389–396. [Google Scholar] [CrossRef]
- Liu, J.; Tan, J.; Mao, E.; Song, Z.; Zhu, Z. Proportional Directional Valve Based Automatic Steering System for Tractors. Front. Inf. Technol. Electronic. Eng. 2016, 17, 458–464. [Google Scholar] [CrossRef]
- Ljungqvist, O.; Evestedt, N.; Axehill, D.; Cirillo, M.; Pettersson, H. A Path Planning and Path-Following Control Framework for a General 2-Trailer with a Car-like Tractor. J. Field Rob. 1377, 36, 1345. [Google Scholar] [CrossRef]
- Zhou, J.; He, Y. Research Progress on Navigation Path Planning of Agricultural Machinery. Trans. Chin. Soc. Agric. Mach. 2021, 52, 1–14. [Google Scholar] [CrossRef]
- Graf Plessen, M.M. Partial Field Coverage Based on Two Path Planning Patterns. Biosyst. Eng. 2018, 171, 16–29. [Google Scholar] [CrossRef]
- Utamima, A.; Reiners, T.; Ansaripoor, A.H. Optimisation of Agricultural Routing Planning in Field Logistics with Evolutionary Hybrid Neighbourhood Search. Biosyst. Eng. 2019, 184, 166–180. [Google Scholar] [CrossRef]
- Utamima, A.; Reiners, T.; Ansaripoor, A.H. Evolutionary Estimation of Distribution Algorithm for Agricultural Routing Planning in Field Logistics. Procedia Comput. Sci. 2019, 161, 560–567. [Google Scholar] [CrossRef]
- Holpp, M.; Kroulik, M.; Kviz, Z.; Anken, T.; Sauter, M.; Hensel, O. Large-Scale Field Evaluation of Driving Performance and Ergonomic Effects of Satellite-Based Guidance Systems. Biosyst. Eng. 2013, 116, 190–197. [Google Scholar] [CrossRef]
- Meng, Z.; Liu, H.; Wang, H.; Fu, W. Optimal Path Planning for Agricultural Machinery. Trans. Chin. Soc. Agric. Mach. 2012, 43, 147–152. [Google Scholar] [CrossRef]
- Cariou, C.; Gobor, Z.; Seiferth, B.; Berducat, M. Mobile Robot Trajectory Planning Under Kinematic and Dynamic Constraints for Partial and Full Field Coverage. J. Field Robot. 2017, 34, 1297–1312. [Google Scholar] [CrossRef]
- Boryga, M.; Kołodziej, P.; Gołacki, K. Application of Polynomial Transition Curves for Trajectory Planning on the Headlands. Agriculture 2020, 10, 144. [Google Scholar] [CrossRef]
- Wu, C.; Wang, D.; Chen, Z.; Song, B.; Yang, L.; Yang, W. Autonomous driving and operation control method for SF2104 tractors. Trans. Chin. Soc. Agric. Eng. 2020, 36, 42–48. [Google Scholar] [CrossRef]
- An, G.; Yu, C.; Du, J.; Yin, X.; Ni, Y.; Jin, C. Development of the Electric Automatic Steering System for Agricultural Vehicles. Int. J. Agric. Biol. Eng. 2024, 17, 209–214. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X.; Liu, H.; Li, J.; Wang, P.; Yang, X. A Full-Coverage Path Planning Method for an Orchard Mower Based on the Dung Beetle Optimization Algorithm. Agriculture 2024, 14, 865. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, E.; Liu, Y.; Du, J.; Yin, X. ZPTM: Zigzag Path Tracking Method for Agricultural Vehicles Using Point Cloud Representation. Sensors 2025, 25, 1110. [Google Scholar] [CrossRef] [PubMed]
- Zhou, K.; Jensen, A.L.; Bochtis, D.D.; Sørensen, C.G. Quantifying the Benefits of Alternative Fieldwork Patterns in a Potato Cultivation System. Comput. Electron. Agric. 2015, 119, 228–240. [Google Scholar] [CrossRef]
- Wei, S.; Li, S.; Zhang, M.; Ji, Y.; Xiang, M.; Li, M. Automatic navigation path search and turning control of agricultural machinery based on GNSS. Trans. Chin. Soc. Agric. Eng. 2017, 33, 70–77. [Google Scholar] [CrossRef]
- Zhou, Z.; Yu, X.; Liang, L.; Xiang, Y.; Chen, Y.; Luo, X. Design and Experiment of Translation and Line Feed Navigation Control System for Four Wheel Steering Sprayer. Trans. Chin. Soc. Agric. Mach. 2023, 54, 68–78. [Google Scholar] [CrossRef]
- Huang, S.; Pan, K.; Wang, S.; Zhu, Y.; Zhang, Q.; Su, X.; Yu, H. Design and Test of an Automatic Navigation Fruit-Picking Platform. Agriculture 2023, 13, 882. [Google Scholar] [CrossRef]
- Yang, T.; Jin, C.; Ni, Y.; Liu, Z.; Chen, M. Path Planning and Control System Design of an Unmanned Weeding Robot. Agriculture 2023, 13, 2001. [Google Scholar] [CrossRef]
- Baltazar, J.d.A.; Coelho, A.L.d.F.; Valente, D.S.M.; de Queiroz, D.M.; Villar, F.M.d.M. Development of a Robotic Platform with Autonomous Navigation System for Agriculture. AgriEngineering 2024, 6, 3362–3374. [Google Scholar] [CrossRef]
- Zhai, W.; Wang, D.; Chen, Z.; Dong, L.; Zhao, X.; Wu, C. Autonomous operation path planning method for unmanned agricultural machinery. Trans. Chin. Soc. Agric. Eng. 2021, 37, 1–7. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Parameters | Value |
|---|---|
| Length × width × height (mm) | 3275 × 2265 × 2605 |
| Turning radius (mm) | 1500 |
| Row spacing (mm) | 300 |
| Number of working rows | 6 |
| Transplanting depth (mm) | 10~52 |
| Speed (km·h−1) | 0~5.6 |
| Engine power (kW) | 16.1 |
| System States | Operational States | Driving Control | Implement Control |
|---|---|---|---|
| Start | Start state | Initialization | U, N |
| S1 | Non-working state | Straight ahead | U, N |
| S2 | Working state | Straight ahead | D, Y |
| S3 | Path-switching state | Headland turning | U, N |
| Stop | Work completion state | Cessation | U, N |
| Path | Lateral Error/cm | Heading Error/° | ||||
|---|---|---|---|---|---|---|
| Average Values | Maximum Values | RMS | Average Values | Maximum Values | RMS | |
| Path 1 | 1.57 | 4.83 | 1.94 | 0.25 | 1.03 | 0.31 |
| Path 2 | 1.20 | 3.47 | 1.51 | 0.26 | 1.13 | 0.38 |
| Path | Lateral Error/cm | Heading Error/° | ||||
|---|---|---|---|---|---|---|
| Average Values | Maximum Values | RMS | Average Values | Maximum Values | RMS | |
| Path 1 | 1.59 | 6.22 | 2.22 | 0.54 | 1.68 | 0.64 |
| Path 2 | 1.70 | 4.86 | 2.20 | 0.39 | 1.51 | 0.51 |
| Path 3 | 1.67 | 4.46 | 1.99 | 0.52 | 1.76 | 0.65 |
| Path 4 | 2.27 | 5.23 | 2.74 | 0.43 | 2.25 | 0.63 |
| Path 5 | 3.03 | 6.18 | 3.12 | 0.48 | 1.70 | 0.60 |
| Path 6 | 2.31 | 5.97 | 2.97 | 0.30 | 1.28 | 0.40 |
| Path 7 | 2.27 | 4.99 | 2.62 | 0.47 | 1.66 | 0.58 |
| Path 8 | 3.16 | 6.30 | 3.60 | 0.50 | 2.09 | 0.68 |
| Path 9 | 2.48 | 5.57 | 2.78 | 0.43 | 1.66 | 0.53 |
| Path 10 | 2.89 | 6.09 | 3.27 | 0.59 | 2.13 | 0.80 |
| Path | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Errors in working key points /cm | 7.22 | 4.77 | 6.72 | 6.41 | 5.29 | 5.02 | 3.26 | 6.93 | 4.35 | 5.86 |
| Errors in path-switching key points /cm | 2.23 | 4.55 | 4.73 | 2.95 | 4.02 | 2.68 | 3.38 | 3.12 | 4.01 | 3.89 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhong, Z.; Yao, Y.; Zhu, J.; Liu, Y.; Du, J.; Yin, X. Automation of Rice Transplanter Using Agricultural Navigation. Agriculture 2025, 15, 1125. https://doi.org/10.3390/agriculture15111125
Zhong Z, Yao Y, Zhu J, Liu Y, Du J, Yin X. Automation of Rice Transplanter Using Agricultural Navigation. Agriculture. 2025; 15(11):1125. https://doi.org/10.3390/agriculture15111125
Chicago/Turabian StyleZhong, Zhidong, Yifan Yao, Jianyu Zhu, Yufei Liu, Juan Du, and Xiang Yin. 2025. "Automation of Rice Transplanter Using Agricultural Navigation" Agriculture 15, no. 11: 1125. https://doi.org/10.3390/agriculture15111125
APA StyleZhong, Z., Yao, Y., Zhu, J., Liu, Y., Du, J., & Yin, X. (2025). Automation of Rice Transplanter Using Agricultural Navigation. Agriculture, 15(11), 1125. https://doi.org/10.3390/agriculture15111125