
A Full-Coverage Path Planning Method for an Orchard Mower Based on the Dung Beetle Optimization Algorithm


Abstract
1. Introduction
2. Problem Description
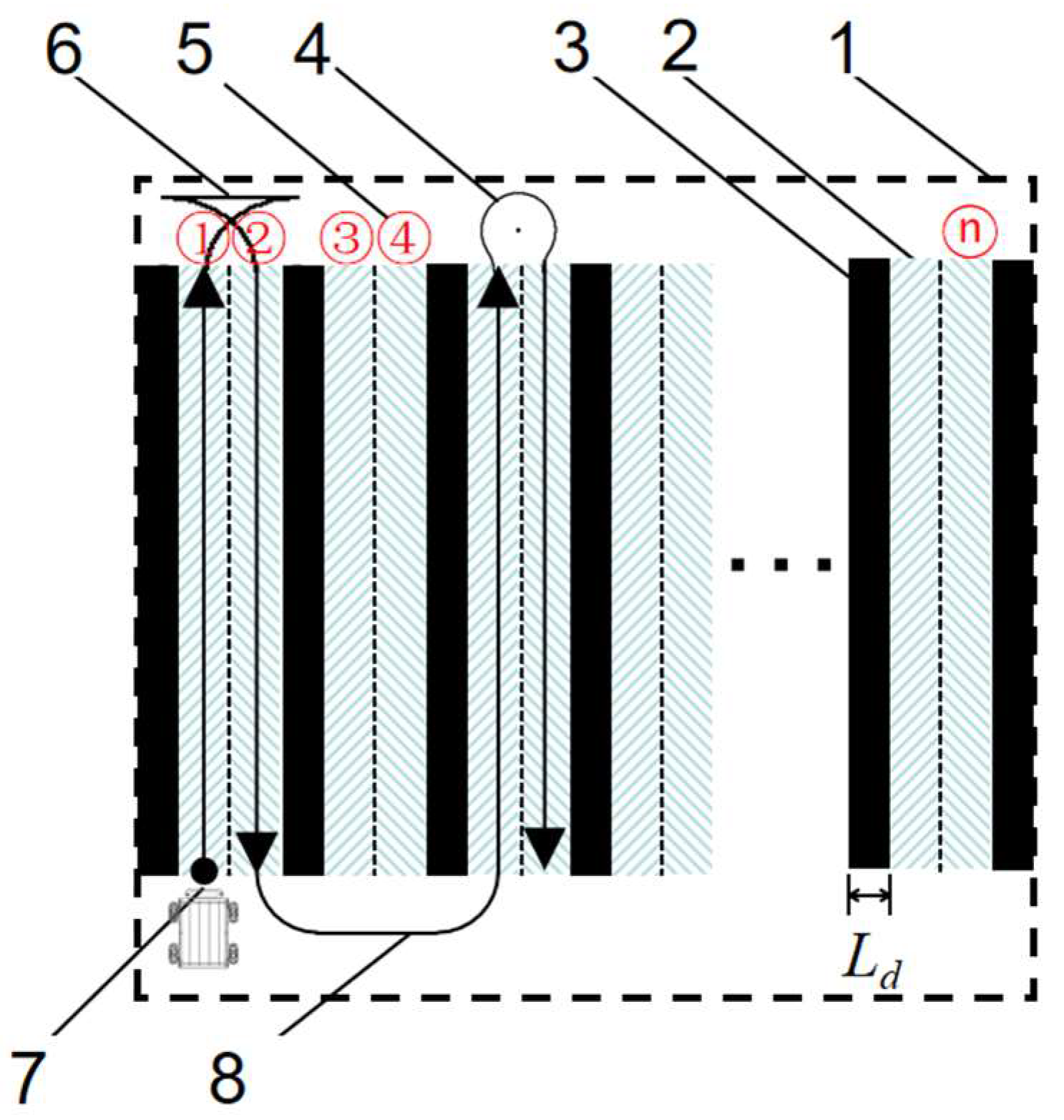
2.1. Characteristics and Path Requirements of Orchard Mowing
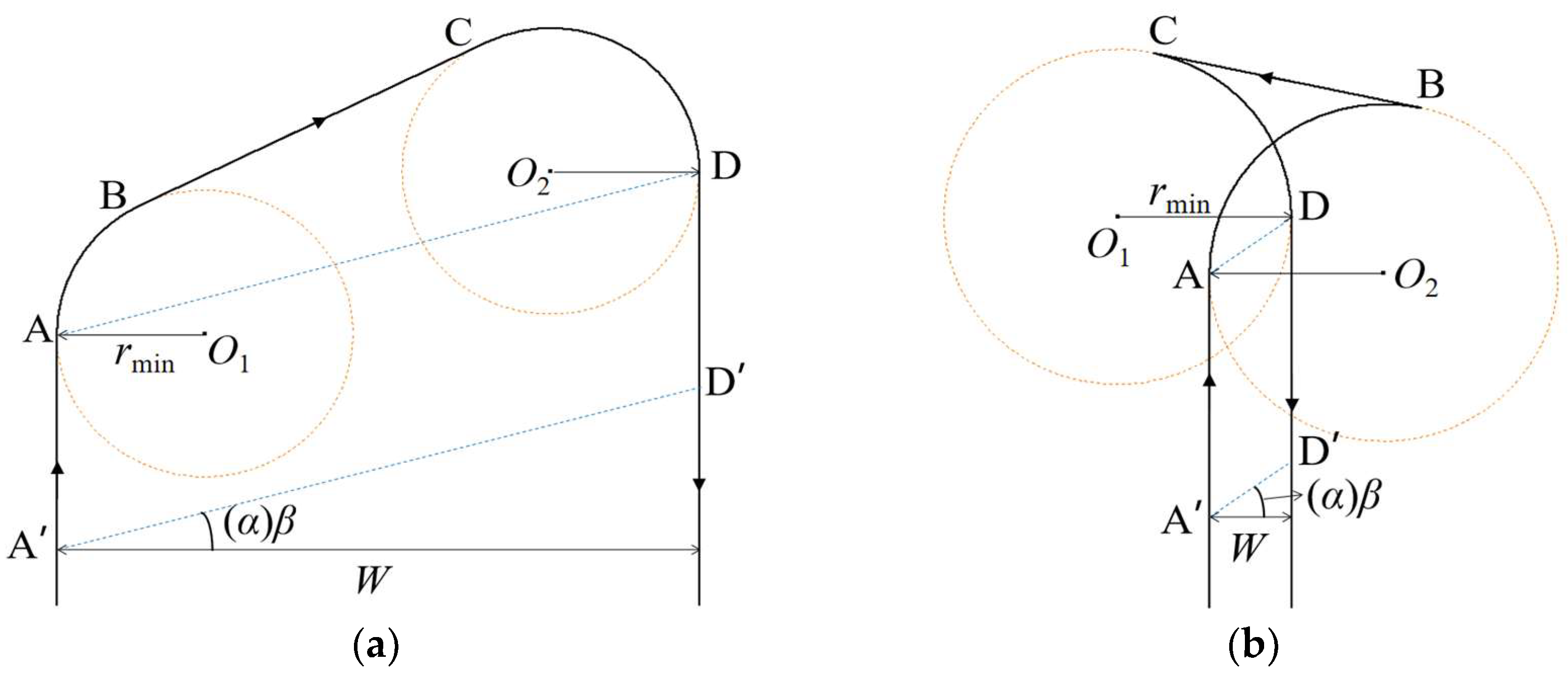
- Distance Feature: minimize the length of turning path to reduce turning consumption (time, fuel) as much as possible;
- Field Edge Space Feature: occupy the smallest field edge turning space to reduce preparation work for the field edge area;
- Reverse Feature: compatible with the machine’s reversing capability; for example, T-turn requires the mower to reverse.
2.2. Mathematical Model
3. Materials and Methods
3.1. Dung Beetle Optimization Algorithm
3.2. Multi-Strategy Improved DBO
| Algorithm 1. MI-DBO. |
| Initialize population and parameters num_dung beetle = N MaxIter = T minBounds = Lb maxBounds = Ub Initialize population position utilization Equations (21) and (25) Initialize global fitness values Fitness utilization Equation (7) While (t < T) do For i = 1:N do If i∈rolling_dung_beetle then If τ < 0.9 then # τ∈(0,1) Update the location of dung beetle X(i) utilization Equation (12) Update fitness values NewFit[i] utilization Equation (7) Else Update the location of dung beetle X(i) utilization Equation (14) Update fitness values NewFit[i] utilization Equation (7) End If End If If i∈breeding_dung_beetle then Update the location of dung beetle X(i) utilization Equation (29) Update fitness values NewFit[i] utilization Equation (7) End If If i∈foraging_dung_beetle then Update the location of dung beetle X(i) utilization Equation (30) Update fitness values NewFit[i] utilization Equation (7) End If If i∈stealing_dung_beetle then Update the location of dung beetle X(i) utilization Equation (31) Update fitness values NewFit[i] utilization Equation (7) End If Greedy choice If NewFit[i] < Fitness then Fit[i] = NewFit[i] End If End For t = t+1 End While Output the global optimal position BestPosition and its fitness value BestFitness |
3.3. Computing Environment
3.4. Orchard Environment
4. Results and Discussion
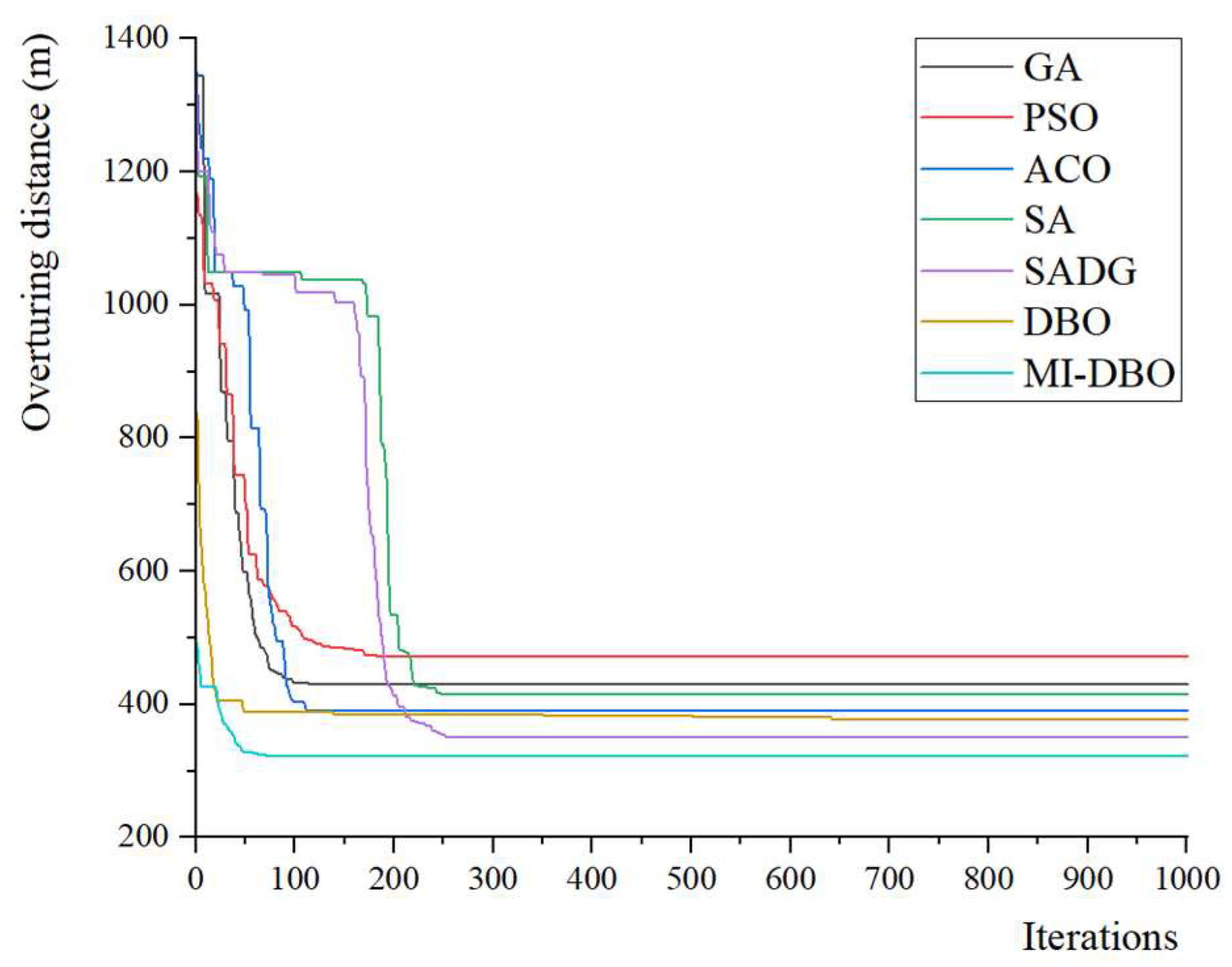
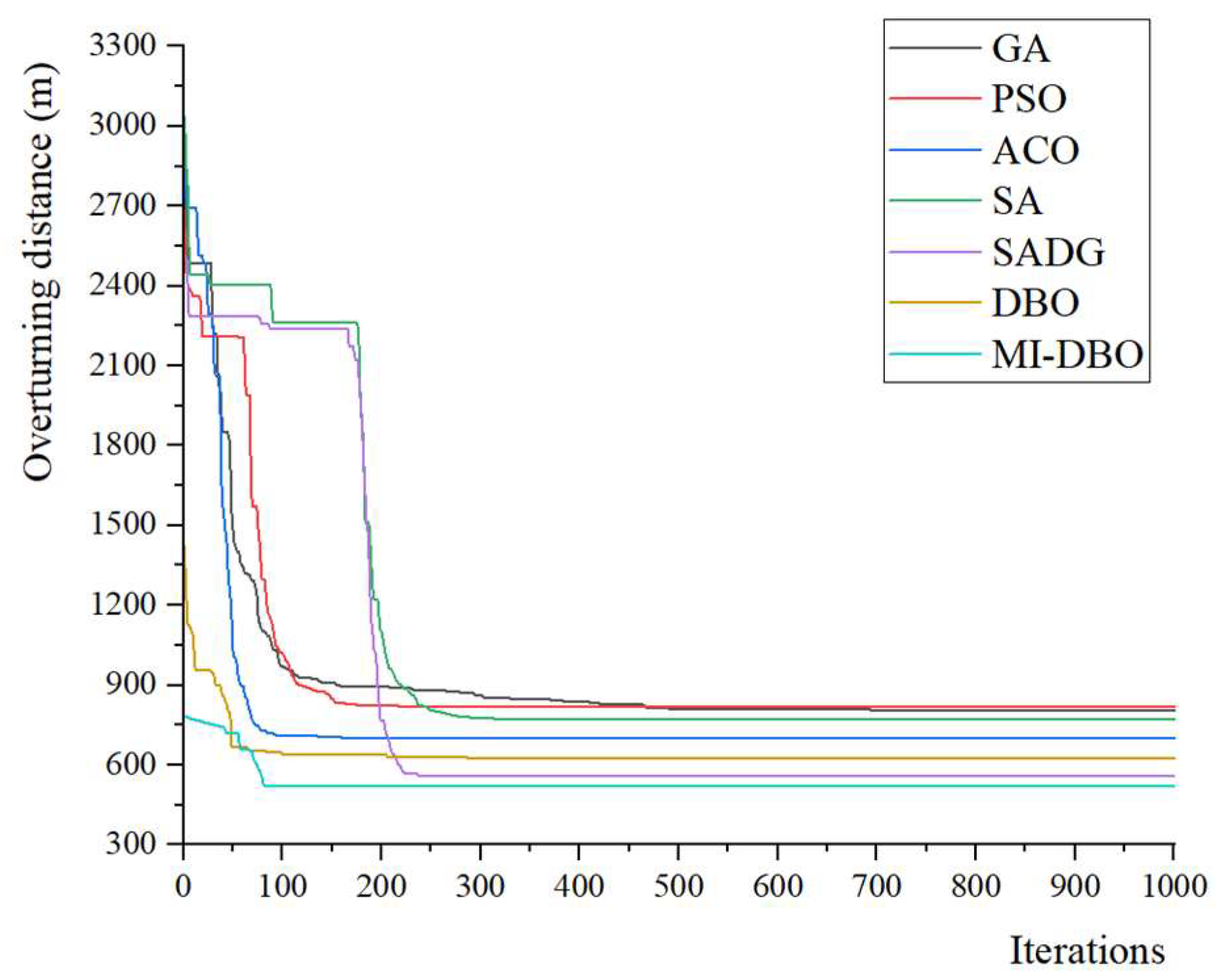
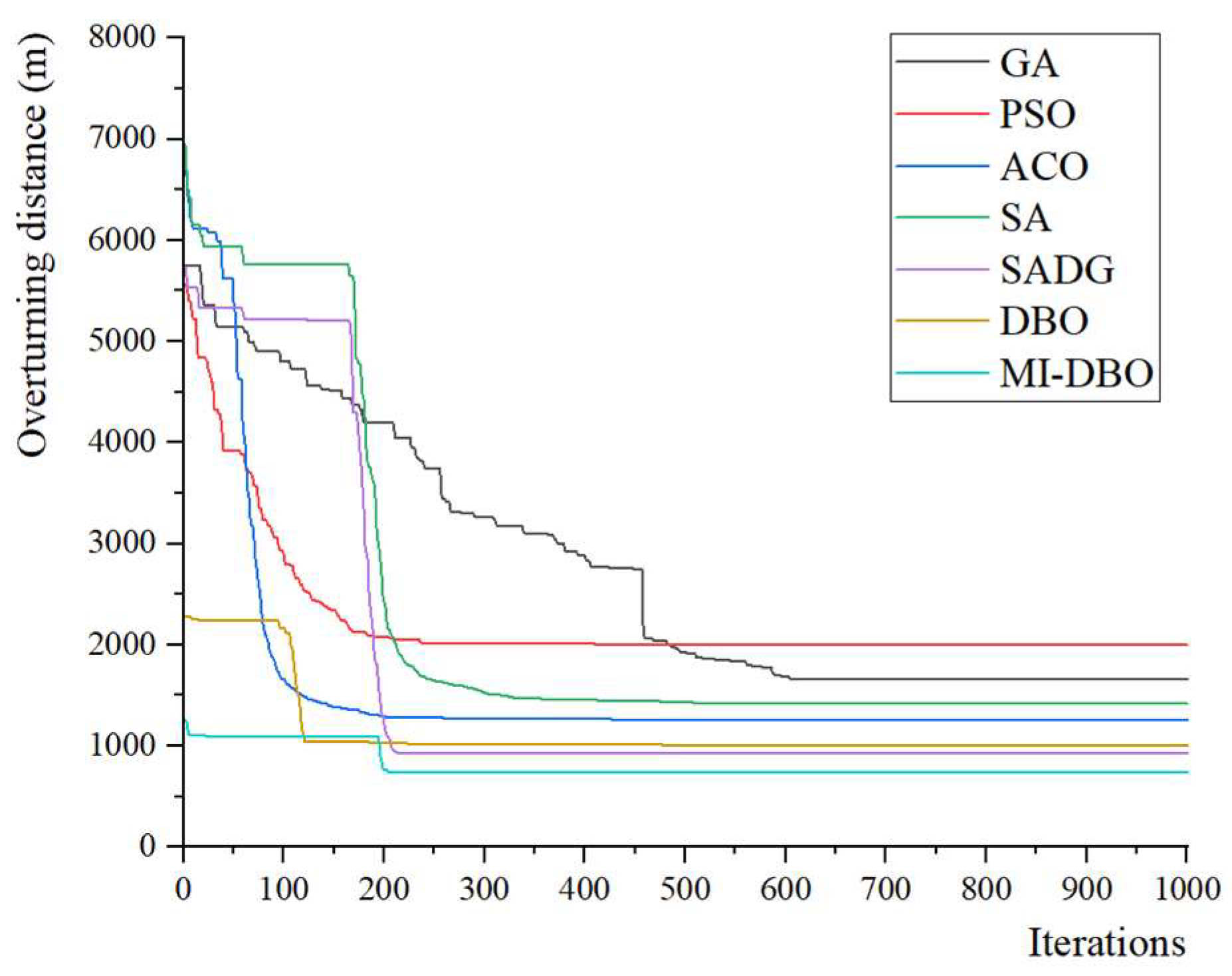
4.1. Optimization Performance Test Results and Discussion
4.2. Optimization Efficiency Test Results and Discussion
4.3. Orchard Test Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qian, L.; Lu, H.; Gao, Q.; Lu, H. Household-owned farm machinery vs. outsourced machinery services: The impact of agricultural mechanization on the land leasing behavior of relatively large-scale farmers in China. Land Use Policy 2022, 115, 106008. [Google Scholar] [CrossRef]
- Chakraborty, S.; Elangovan, D.; Govindarajan, P.L.; ELnaggar, M.F.; Alrashed, M.M.; Kamel, S. A comprehensive review of path planning for agricultural ground robots. Sustainability 2022, 14, 9156. [Google Scholar] [CrossRef]
- Liu, L.; Wang, X.; Wang, X.; Xie, J.; Liu, H.; Li, J.; Wang, P.; Yang, X. Path Planning and Tracking Control of Tracked Agricultural Machinery Based on Improved A* and Fuzzy Control. Electronics 2024, 13, 188. [Google Scholar] [CrossRef]
- Sharma, V.; Tripathi, A.K.; Mittal, H. Technological revolutions in smart farming: Current trends, challenges & future directions. Comput. Electron. Agric. 2022, 201, 107217. [Google Scholar]
- Albiero, D.; Garcia, A.P.; Umezu, C.K.; Paulo, R.L. Swarm robots in mechanized agricultural operations: A review about challenges for research. Comput. Electron. Agric. 2022, 193, 106608. [Google Scholar] [CrossRef]
- Zhang, M.; Ji, H.Y.; Li, S.C.; Cao, R.Y.; Xu, H.Z.; Zhang, Z.Q. Research Progress of Agricultural Machinery Navigation Technology. Trans. Chin. Soc. Agric. Mach. 2020, 51, 1–18. [Google Scholar]
- Huang, X.M.; Ding, Y.C.; Zong, Y.W.; Liao, Q.X. Research on the Turning Mode and Path Generation Algorithm of Agricultural Machinery Operation Headland; Annual Academic Conference of China Agricultural Engineering Society: Chongqing, China, 2011; pp. 1–6. [Google Scholar]
- Bochtis, D. Planning and Control of a Fleet of Agricultural Machines for Optimal Management of Field Operations. Ph.D. Thesis, Aristotle University of Thessaloniki, Department of Agricultural Engineering, Thessaloniki, Greece, 2008. [Google Scholar]
- Zhou, X.; Zhang, L.; Ma, Y. The Application of Environment Modeling Based on Grid Map in Path Planning of Cleaning Robot. Manag. Technol. SME 2021, 7, 183–184. [Google Scholar]
- Chen, K.; Xie, Y.; Li, Y.; Liu, C.; Mo, J. Full Coverage Path Planning Method of Agricultural Machinery under Multiple Constraints. Trans. Chin. Soc. Agric. Mach. 2022, 5, 17–26+43. [Google Scholar]
- Jeon, C.W.; Kim, H.J.; Yun, C.; Han, X.; Kim, J.H. Design and validation testing of a complete paddy field-coverage path planner for a fully autonomous tillage tractor. Biosyst. Eng. 2021, 208, 79–97. [Google Scholar] [CrossRef]
- Huang, X.M.; Fu, Z.K.; Ding, Y.C.; Wang, J.Y.; Li, X. Sequence optimization of direction parallel path for the agricultural vehicles in field of rectangle boundary. J. Huazhong Agric. Univ. 2014, 33, 130–136. [Google Scholar]
- Huang, X.M.; Zhang, L.; Wang, S.S.; Luo, C.M. Path Planning of Rapeseed Combine Seeder in Field of Convex Boundary. Trans. Chin. Soc. Agric. Mach. 2022, 53, 33–40+150. [Google Scholar]
- Sethanan, K.; Neungmatcha, W. Multi-objective particle swarm optimization for mechanical harvester route planning of sugarcane field operations. Eur. J. Oper. Res. 2016, 252, 969–984. [Google Scholar] [CrossRef]
- Yao, J.F.; Liu, J.; Zhang, P.; Teng, G.F. Optimization of agricultural machinery operation path based on doppler and greedy strategy. J. Chin. Agric. Mech. 2020, 41, 130–137. [Google Scholar]
- Xu, J.; Lai, J.; Guo, R.; Lu, X.; Xu, L. Efficiency-Oriented MPC Algorithm for Path Tracking in Autonomous Agricultural Machinery. Agronomy 2022, 12, 1662. [Google Scholar] [CrossRef]
- Bochtis, D.; Griepentrog, H.W.; Vougioukas, S.; Busato, P.; Berruto, R.; Zhou, K. Route planning for orchard operations. Comput. Electron. Agric. 2015, 113, 51–60. [Google Scholar] [CrossRef]
- Matei, O.; Pop, P. An efficient genetic algorithm for solving the generalized traveling salesman problem. In Proceedings of the 2010 IEEE 6th International Conference on Intelligent Computer Communication and Processing, Cluj-Napoca, Romania, 26–28 August 2010; pp. 87–92. [Google Scholar]
- Jain, M.; Saihjpal, V.; Singh, N.; Singh, S.B. An overview of variants and advancements of PSO algorithm. Appl. Sci. 2022, 12, 8392. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. The Ant System: An Autocatalytic Optimizing Process; Academia: Cambridge, MA, USA, 1991. [Google Scholar]
- Karabulut, K.; Tasgetiren, M.F. A variable iterated greedy algorithm for the traveling salesman problem with time windows. Inf. Sci. 2014, 279, 383–395. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2023, 79, 7305–7336. [Google Scholar] [CrossRef]
- Arora, S.; Anand, P. Chaotic grasshopper optimization algorithm for global optimization. Neural Comput. Appl. 2019, 31, 4385–4405. [Google Scholar] [CrossRef]
- Long, W.; Wu, T.; Tang, M.; Xu, M.; Cai, S. Grey Wolf Optimizer Algorithm Based on Lens Imaging Learning Strategy. Acta Autom. Sin. 2020, 46, 2148–2164. [Google Scholar]
- Liu, L.X.; Wang, X.; Yang, X.; Liu, H.J.; Li, J.P.; Wang, P.F. Path planning techniques for mobile robots: Review and prospect. Expert Syst. Appl. 2023, 120254. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
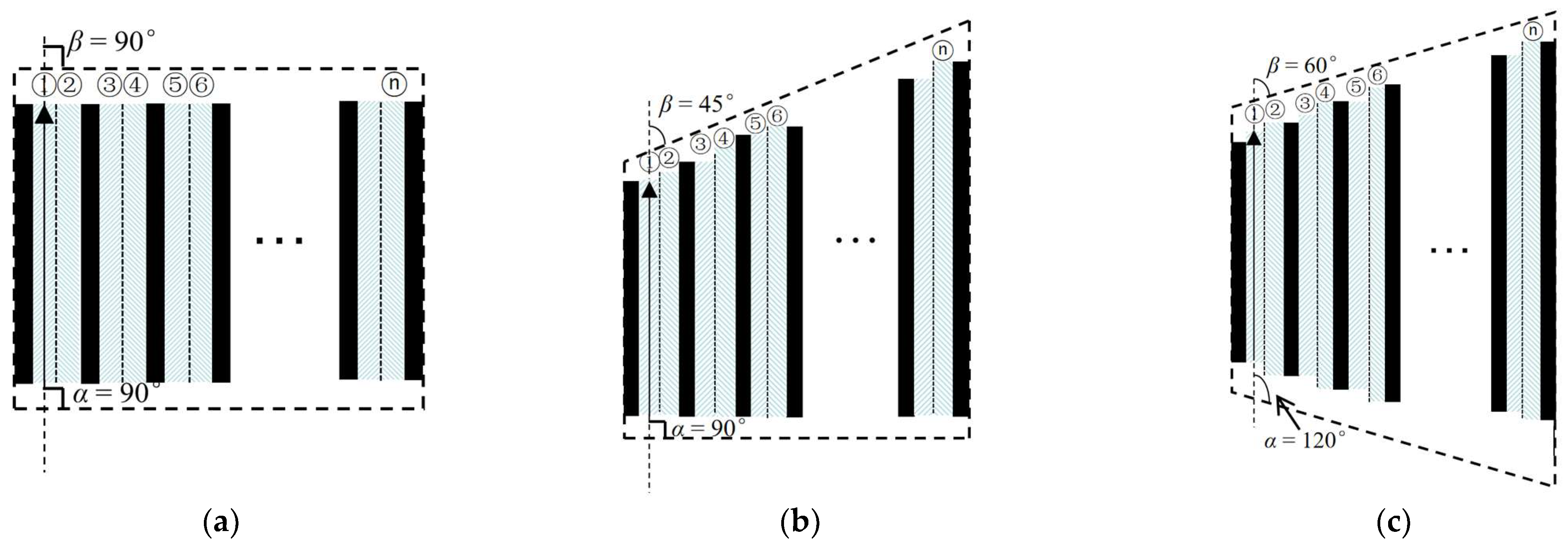
| Park Number | Fruit Tree Line | Mowing Line | Ld/m | α/° | β/° | Total Area of Working Area/m2 |
|---|---|---|---|---|---|---|
| 1 | 6 | 12 | 2 | 90 | 70 | 335.54 |
| 2 | 15 | 30 | 2 | 90 | 80 | 796.13 |
| 3 | 27 | 54 | 2 | 90 | 90 | 4050.00 |
| n | α | β | GA/m | PSO/m | ACO/m | SA/m | SADG/m | DR/% | DBO/m | MI-DBO/m | DR/% |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 10 | 90° | 90° | 81.88 | 81.88 | 81.88 | 81.88 | 77.70 | 5.11 | 81.88 | 77.70 | 5.11 |
| 90° | 45° | 87.88 | 87.88 | 89.68 | 88.41 | 87.88 | 0.60 | 89.68 | 87.88 | 2.00 | |
| 120° | 60° | 86.60 | 86.60 | 87.95 | 86.88 | 86.60 | 0 | 87.95 | 79.08 | 10.09 | |
| 18 | 90° | 90° | 181.69 | 173.81 | 168.09 | 175.16 | 152.92 | 12.70 | 153.04 | 146.41 | 4.33 |
| 90° | 45° | 191.66 | 198.60 | 187.21 | 193.85 | 161.04 | 16.93 | 173.86 | 156.30 | 10.10 | |
| 120° | 60° | 188.98 | 176.64 | 170.33 | 182.83 | 160.49 | 12.22 | 163.08 | 149.12 | 8.56 | |
| 40 | 90° | 90° | 430.12 | 472.81 | 391.23 | 415.52 | 351.02 | 15.52 | 376.85 | 322.76 | 14.35 |
| 90° | 45° | 442.74 | 472.81 | 437.21 | 452.43 | 373.21 | 17.51 | 397.25 | 349.08 | 12.13 | |
| 120° | 60° | 485.52 | 491.45 | 444.13 | 467.40 | 383.12 | 18.03 | 392.65 | 344.15 | 12.35 | |
| 56 | 90° | 90° | 755.64 | 770.00 | 662.09 | 734.64 | 529.02 | 27.99 | 600.52 | 472.76 | 21.27 |
| 90° | 45° | 806.56 | 820.01 | 700.61 | 771.53 | 557.40 | 27.75 | 626.52 | 518.79 | 17.19 | |
| 120° | 60° | 760.63 | 788.61 | 699.52 | 749.63 | 531.89 | 29.05 | 687.13 | 507.43 | 26.15 | |
| 86 | 90° | 90° | 1304.67 | 1259.72 | 1072.78 | 1196.08 | 880.44 | 26.39 | 901.11 | 700.42 | 22.27 |
| 90° | 45° | 1602.92 | 1431.54 | 1311.43 | 1596.61 | 941.50 | 41.03 | 1221.78 | 730.40 | 40.25 | |
| 120° | 60° | 1667.08 | 1999.76 | 1261.93 | 1416.79 | 932.57 | 34.18 | 1005.66 | 744.51 | 25.99 | |
| 110 | 90° | 90° | 1951.51 | 1850.21 | 1632.30 | 1684.88 | 1007.88 | 40.18 | 1410.60 | 936.51 | 33.61 |
| 90° | 45° | 2114.84 | 2118.23 | 2117.56 | 2202.09 | 1116.39 | 49.30 | 1619.72 | 936.51 | 42.18 | |
| 120° | 60° | 2100.16 | 2163.22 | 2079.41 | 2102.21 | 1105.35 | 47.42 | 2767.38 | 954.64 | 65.50 | |
| 90° | 90° | 81.88 | 81.88 | 81.88 | 81.88 | 77.70 | 5.11 | 708.70 | 456.36 | 20.75 | |
| Average | 846.73 | 857.99 | 755.30 | 811.05 | 524.25 | 23.44 | 81.88 | 77.70 | 5.11 | ||
| Park Number | Method | Working Line Sequence | T/s | G/% | M/% |
| 1 | Row-by-row | 1→2→3→4→5→6→7→8→9→10→11→12 | 1093 | 8.30 | 0.36 |
| SADG | 6→4→2→1→3→5→7→9→12→10→11→8 | 642 | 4.88 | 0.69 | |
| DBO | 2→5→8→11→12→10→7→9→6→3→1→4 | 694 | 5.27 | 0.57 | |
| MI-DBO | 3→1→2→4→6→8→11→9→12→10→7→5 | 558 | 4.46 | 0.56 | |
| 2 | Row-by-row | 1→2→3→4→5→6→7→8→9→10→11→12→13→14→15→16→17→18→19→20→21→22→23→24→25→26→27→28→29→30 | 3496 | 26.56 | 0.38 |
| SADG | 23→26→29→27→30→28→25→24→21→18→15→17→20→22→19→16→13→11→9→7→5→2→4→1→3→6→8→10→12→14 | 2711 | 19.21 | 0.50 | |
| DBO | 22→24→27→25→28→30→29→26→23→20→17→14→11→13→16→19→21→18→15→10→8→6→4→2→1→3→5→7→9→12 | 2798 | 20.16 | 0.72 | |
| MI-DBO | 29→26→24→22→20→18→16→14→12→10→8→6→3→1→4→2→5→7→9→11→13→15→17→19→21→23→25→28→30→27 | 2596 | 17.67 | 0.64 | |
| 3 | Row-by-row | 1→2→3→4→5→6→7→8→9→10→11→12→13→14→15→16→17→18→19→20→22→23→24→25→26→27→28→29→30→31→32→33→34→35→36→37→38→39→40→41→42→43→44→45→46→47→48→49→50→51→52→53→54 | 8064 | 61.26 | 0.41 |
| SADG | 35→32→29→26→23→24→27→30→33→31→28→25→22→20→19→17→14→16→13→11→9→7→5→2→4→1→3→6→8→10→12→15→18→21→34→36→38→40→42→44→46→48→50→53→51→54→52→49→47→45→43→41→39→37 | 6332 | 48.69 | 0.57 | |
| DBO | 4→2→5→7→9→11→17→31→34→37→38→40→42→44→46→48→50→53→51→54→52→49→47→45→43→41→39→36→33→35→32→29→26→23→20→15→12→14→16→18→21→24→27→30→28→25→22→19→13→10→8→6→3→1 | 6523 | 49.11 | 0.72 | |
| MI-DBO | 36→34→32→30→28→26→24→22→20→18→16→14→12→10→8→6→3→1→4→2→5→7→9→11→13→15→17→19→21→23→25→27→29→31→33→35→37→39→41→43→45→47→49→52→54→51→53→50→48→46→44→42→40→38 | 5918 | 44.03 | 0.61 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Wang, X.; Liu, H.; Li, J.; Wang, P.; Yang, X. A Full-Coverage Path Planning Method for an Orchard Mower Based on the Dung Beetle Optimization Algorithm. Agriculture 2024, 14, 865. https://doi.org/10.3390/agriculture14060865
Liu L, Wang X, Liu H, Li J, Wang P, Yang X. A Full-Coverage Path Planning Method for an Orchard Mower Based on the Dung Beetle Optimization Algorithm. Agriculture. 2024; 14(6):865. https://doi.org/10.3390/agriculture14060865
Chicago/Turabian StyleLiu, Lixing, Xu Wang, Hongjie Liu, Jianping Li, Pengfei Wang, and Xin Yang. 2024. "A Full-Coverage Path Planning Method for an Orchard Mower Based on the Dung Beetle Optimization Algorithm" Agriculture 14, no. 6: 865. https://doi.org/10.3390/agriculture14060865
APA StyleLiu, L., Wang, X., Liu, H., Li, J., Wang, P., & Yang, X. (2024). A Full-Coverage Path Planning Method for an Orchard Mower Based on the Dung Beetle Optimization Algorithm. Agriculture, 14(6), 865. https://doi.org/10.3390/agriculture14060865