

Design and Experimentation of Rice Seedling Throwing Apparatus Mounted on Unmanned Aerial Vehicle

Abstract
1. Introduction
2. Materials and Methods
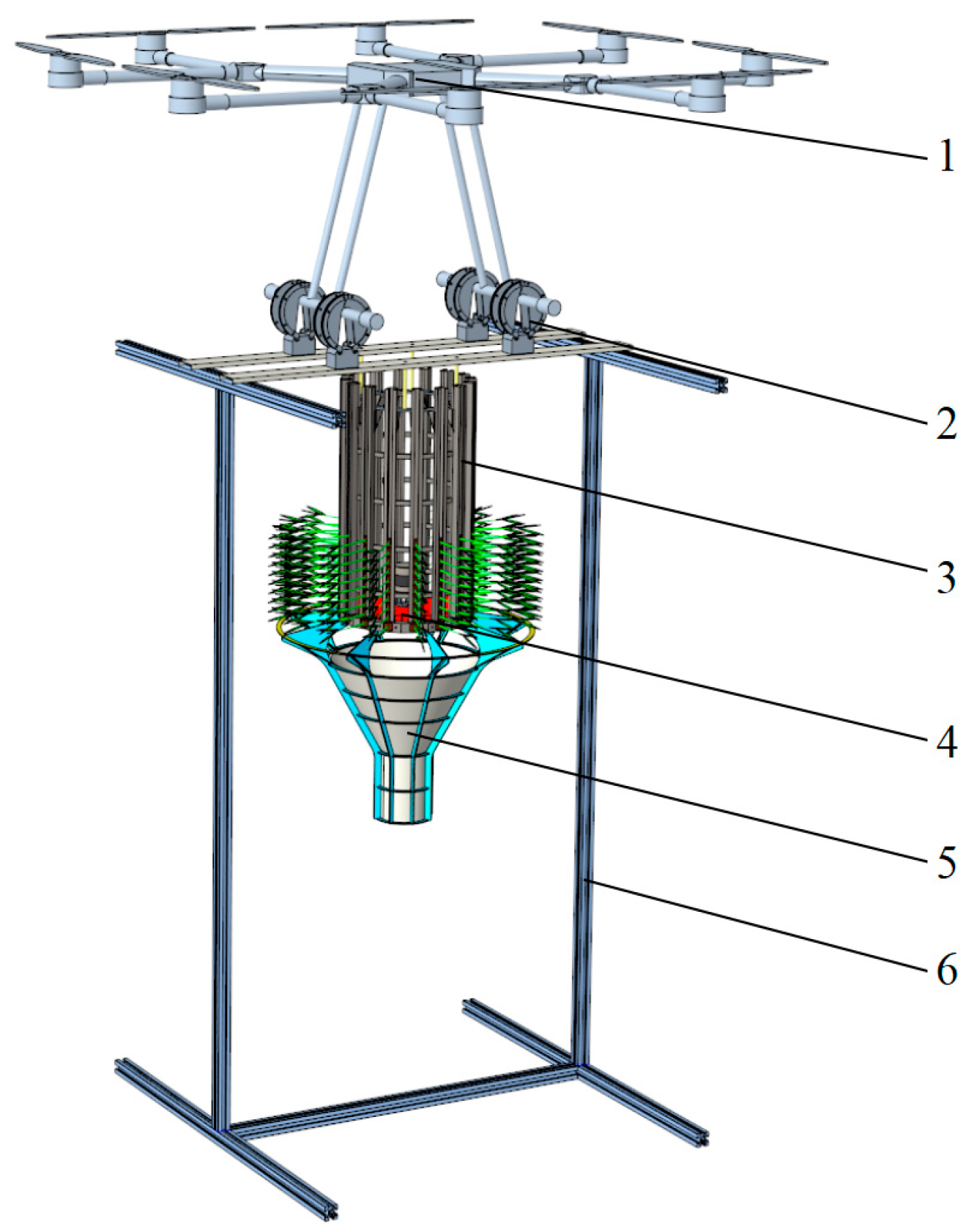
2.1. Overall Structure and Workflow
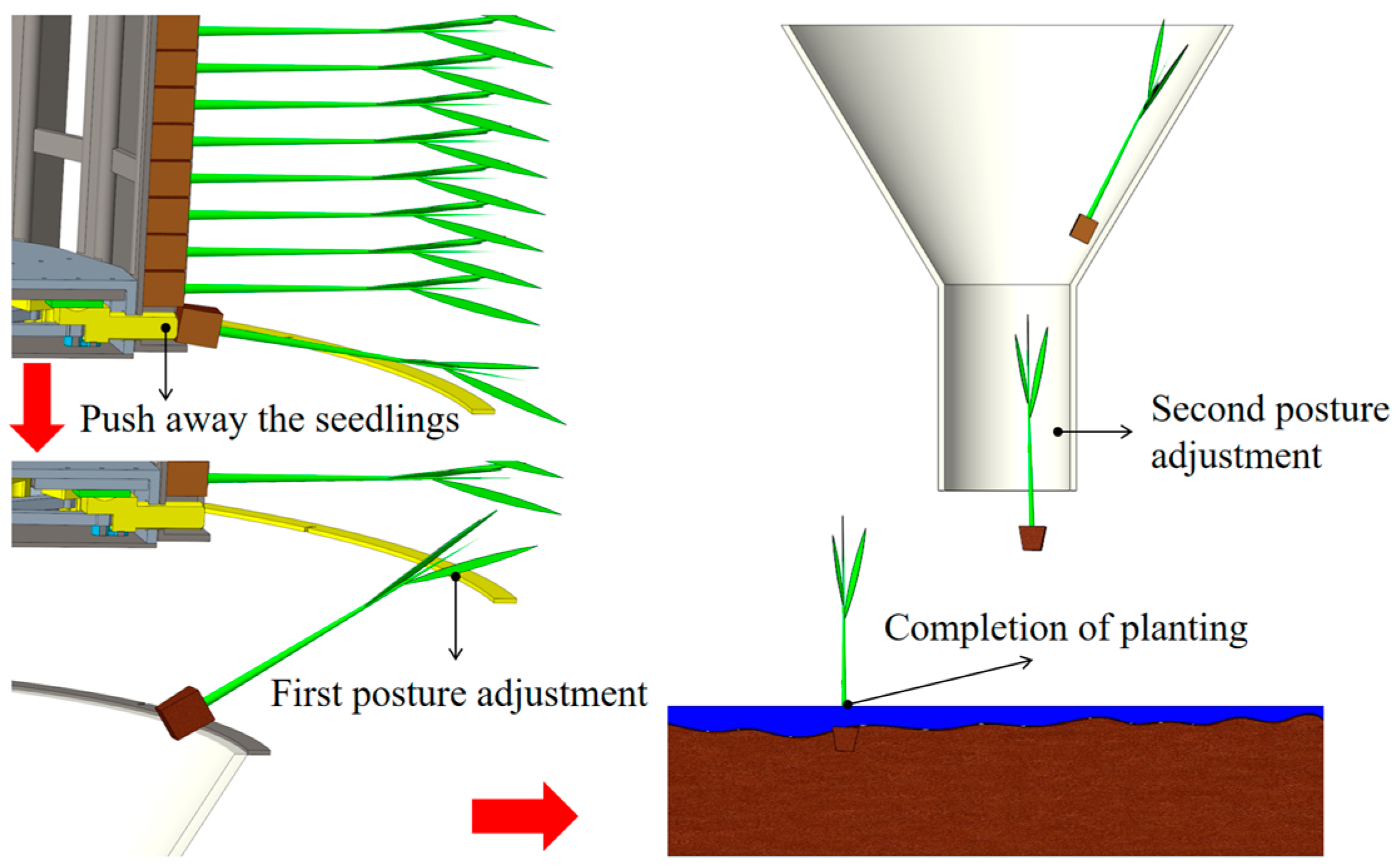
2.2. Working Principle
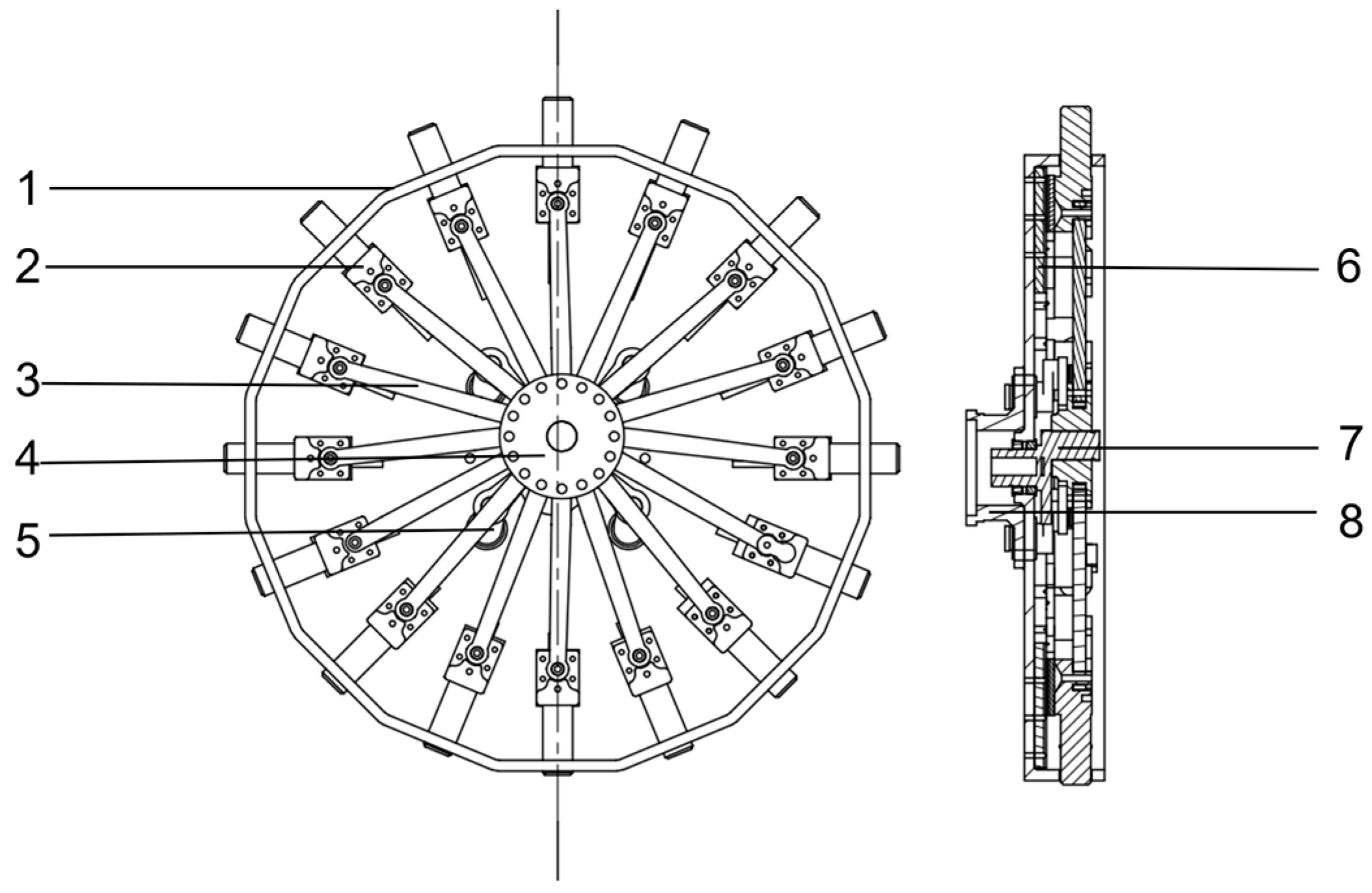
2.2.1. Rice Seedling Carrying and Connection System
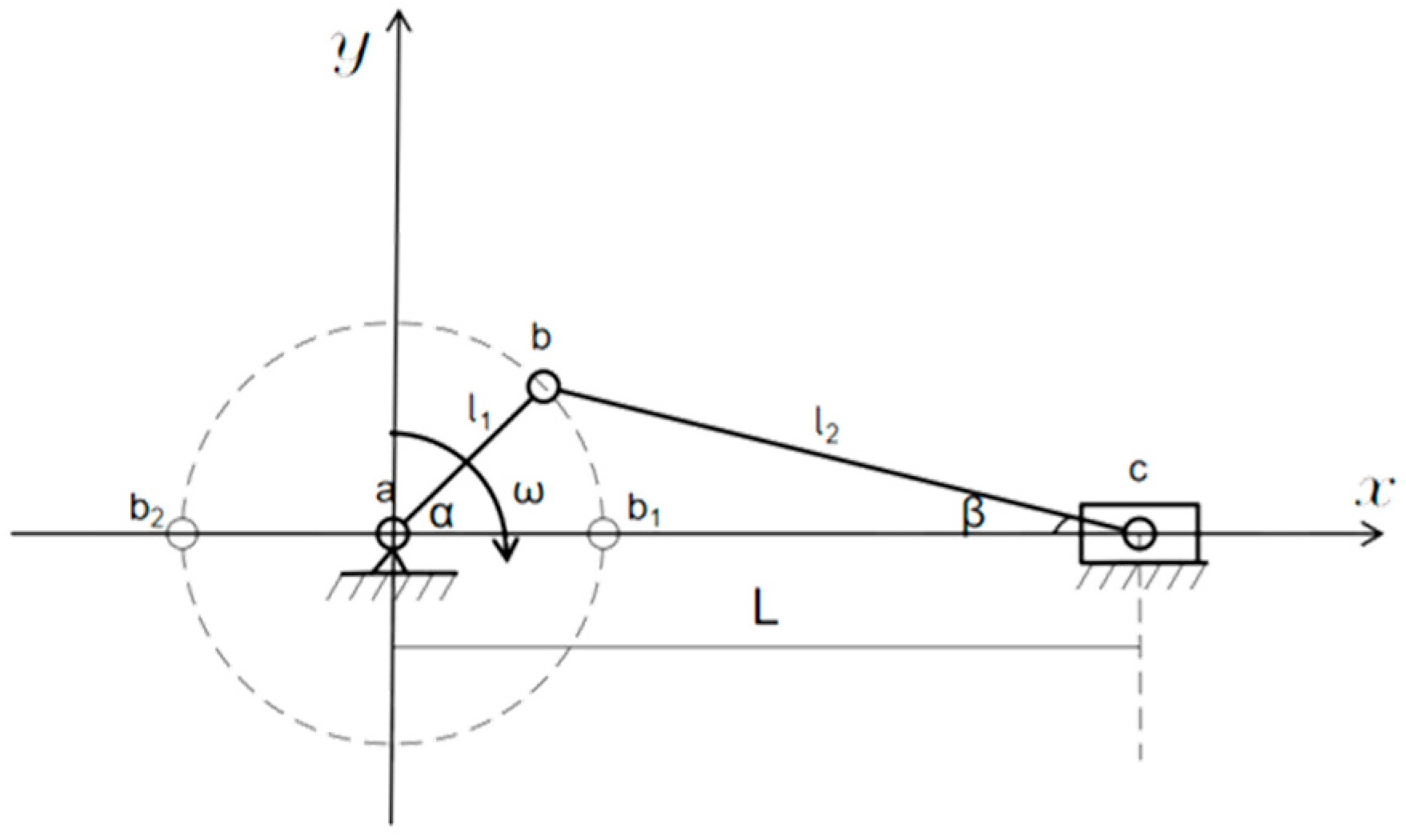
2.2.2. Seedling Pushing Mechanism
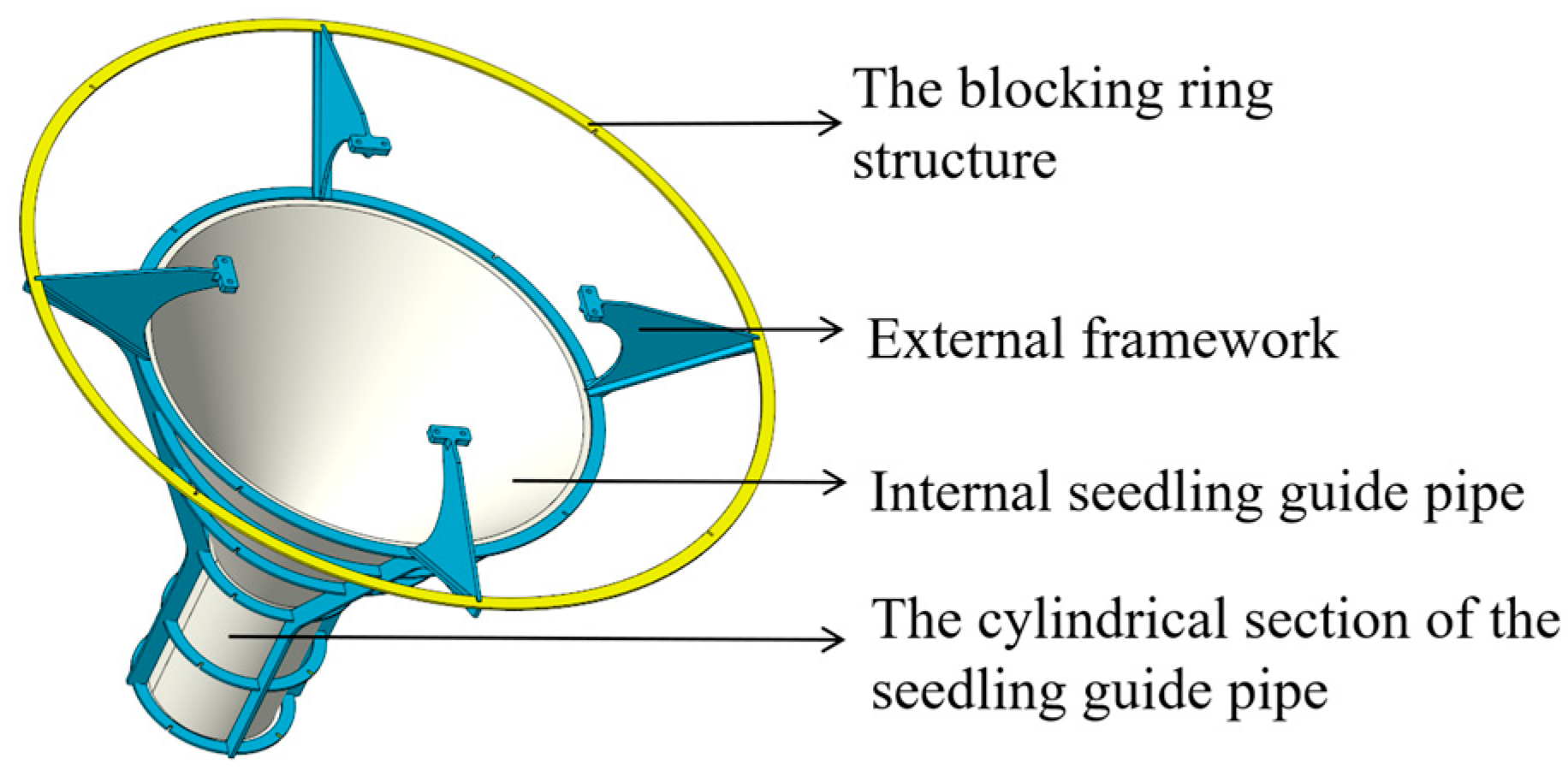
2.2.3. Seedling Guiding Device
3. Working Performance Test
3.1. Platform Test
3.1.1. Test Conditions
3.1.2. Results and Discussion
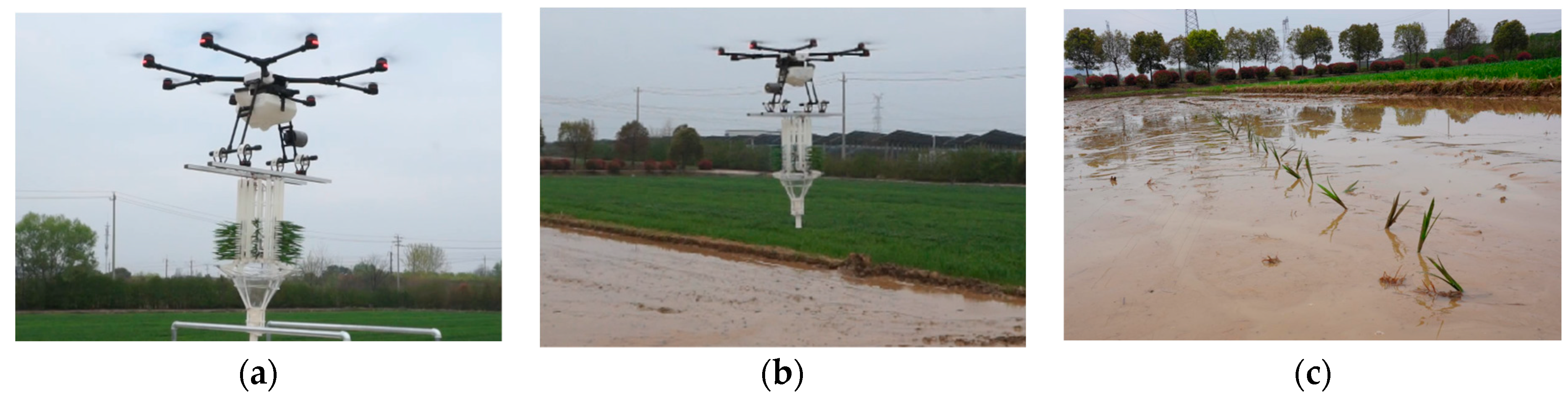
3.2. Field Test
4. Discussion
- Investigating multi-row seedling throwing operations by UAVs. Within the limits of payload and flight stability, adding more rows significantly improves the efficiency of seedling throwing;
- Researching rapid seedling loading methods for UAVs. Although this study proposed a design for a quick-change seedling box, it still requires the manual loading of seedlings into the box. Currently, there is a lack of automated row-wise seedling loading systems to enhance loading efficiency. In the future, efforts can be made to further supplement logistical equipment for UAV operations, gradually improving the completeness of UAV throwing systems;
- Studying uneven rotor airflow distribution in multi-row operations. After UAVs implement multi-row seedling throwing, the airflow distribution from the rotors beneath the UAV varies. This results in inconsistent wind conditions affecting different parts of the throwing devices. To ensure uniform transplanting, further research is needed on the distribution of rotor airflow in multi-row UAV operations.
5. Conclusions
- In response to the challenges of difficult terrain in hilly areas for ground-based agricultural machinery and suboptimal rice throwing effects, a UAV-based orderly seedling throwing apparatus was designed. The main structural components and operational procedures of the device are introduced. The working principles of key components, such as the seedling carrying and connection system, seedling pushing mechanism, and seedling guiding device, are analyzed;
- To further enhance the operational performance of the seedling throwing apparatus, an analysis of factors affecting rice throwing effectiveness was conducted. The throwing height, working speed, and diameter of the seedling guide tube outlet were considered as influencing factors. Performance indicators, including the spacing pass rate and the uprightness pass rate, were used. A three-factor, three-level response surface experimental design was employed, and a regression model for the experimental indicators was obtained. An analysis of the response surface results identified the optimal parameter combination as follows: a throwing height of 142.79 cm, a working speed of 55.38 r/min, and a bottom diameter of the seedling guide tube of 43.51 mm. At these optimal parameters, the model predicted a seedling spacing compliance rate of 88.43% and a seedling erectness compliance rate of 88.12%;
- To validate the accuracy of the model optimization results, field experiments were conducted. Experimental data showed that under the optimal operating parameters calculated using the regression model, the spacing pass rate was 86.7%, and the uprightness pass rate was 84.2%. The experimental results met the design requirements, providing valuable insights for UAV-based rice seedling throwing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, H.; Hu, Y.; Yang, J.; Dai, Q.; Huo, Z.; Xu, K.; Wei, H.; Gao, H.; Guo, B.; Xing, Z.; et al. Development and Prospect of Rice Cultivation in China. Sci. Agric. Sin. 2021, 54, 1301–1321. [Google Scholar]
- Tian, X.; Qin, F.; Li, M. Empirical analysis of the difference of rice production costs in China. Trans. CSAE 2005, 21, 247–250. [Google Scholar]
- Wu, G.; Yu, G.; Xiang, X.; Wang, L. Design and test of rice potted-seedling transplanting mechanism with three transplanting arms. Trans. CSAE 2017, 33, 15–22. [Google Scholar]
- Xia, Q.; Zhang, W.; Ji, Y.; Li, K. Research status and trend of mechanical throwing seedling technology and equipment in China. J. Chin. Agric. Mech. 2019, 40, 201–208. [Google Scholar]
- Li, Z.; Ma, X.; Li, X.; Chen, L.; Li, H.; Yuan, Z. Research Progress of Rice Transplanting Mechanization. Trans. CSAM 2018, 49, 1–20. [Google Scholar]
- Tang, Y.; Wang, Y.; Zhang, D.; Luo, X. Research on Four-Wheel Drive Pneumatic Throwing Transplanter of Paddy Seedling. J. Chin. Agric. Mech. 2009, 3, 72–75. [Google Scholar]
- Wang, L.; Wang, P.; Li, Y.; Song, J. Experiment Study on 2ZPY-H530 Rice Potted-seedling Transplant. J. China Agric. Univ. 2002, 7, 21–24. [Google Scholar]
- Qian, M.; Yu, G.; Jiang, C.; Zhao, Y. Work Principle and Parameter Optimization of Rice-seedling Transplanter with Non-circular Gears. Trans. CSAM 2014, 45, 64–69. [Google Scholar]
- Li, Y.; Xu, J.; Wang, M.; Liu, D.; Sun, H.; Wang, X. Development of autonomous driving transfer trolley on field roads and its visual navigation system for hilly areas. Trans. CSAE 2019, 35, 52–61. [Google Scholar]
- Gong, X.; Fu, Q.; Sun, A.; Guan, Y.; Wang, B.; Li, M. Rice planting potential in plain-hill-wetland area estimated by nature-society water cycle model. Trans. CSAE 2019, 35, 138–147. [Google Scholar]
- Jiang, Y.; Sun, Z.; Wang, R.; Xia, C.; Ye, Q.; Guo, Y. Design and performance test of the omnidirectional leveling system for crawler work machine in hilly areas. Trans. CSAE 2023, 39, 64–73. [Google Scholar]
- Liu, W.; Zhou, Z.; Xu, X.; Gu, X.; Zou, S.; He, W.; Luo, X.; Huang, J.; Lin, J.; Jiang, R. Evaluation method of rowing performance and its optimization for UAV-based shot seeding device on rice sowing. Comput. Electron. Agric. 2023, 207, 107718. [Google Scholar] [CrossRef]
- Ni, J.; Yao, L.; Zhang, J.; Cao, W.; Zhu, Y.; Tai, X. Development of an unmanned aerial vehicle-borne crop-growth monitoring system. Sensors 2017, 17, 502. [Google Scholar] [CrossRef]
- Li, J.; Lan, Y.; Zhou, Z.; Zeng, S.; Huang, C.; Yao, W.; Zhang, Y.; Zhu, Q. Design and test of operation parameters for rice air broadcasting by unmanned aerial vehicle. Int. J. Agric. Biol. Eng. 2016, 9, 24–32. [Google Scholar]
- Yeh, J.; Lin, K.; Yuan, L.; Hsu, J. Automatic counting and location labeling of rice seedlings from unmanned aerial vehicle images. Electronics 2024, 13, 273. [Google Scholar] [CrossRef]
- Amarasingam, N.; Gonzalez, F.; Salgadoe, A.S.A.; Sandino, J.; Powell, K. Detection of White Leaf Disease in Sugarcane Crops Using UAV-Derived RGB Imagery with Existing Deep Learning Models. Remote Sens. 2022, 14, 6137. [Google Scholar] [CrossRef]
- Li, J.; Lan, Y.; Shi, Y. Research progress on airflow characteristics and field pesticide application system of rotary-wing UAV. Trans. CSAE 2018, 34, 104–118. [Google Scholar]
- Gao, X.; You, Z.; Wu, H.; Wang, S.; Cao, M. Design and Experiment of Green Manure Seed Broadcast Device Based on Unmanned Aerial Vehicle Platform. Trans. CSAM 2022, 53, 76–85. [Google Scholar]
- Zhang, Q.; Zhang, K.; Liao, Q.; Liao, Y.; Wang, L.; Shu, C. Design and experiment of rapeseed aerial seeding device used for UAV. Trans. CSAE 2020, 36, 138–147. [Google Scholar]
- Zhang, H.; Lan, Y.; Wen, S.; Chen, C.; Xu, T.; Chen, S. Modelling approach of spray retention on rice in plant protection using unmanned aerial vehicle. Trans. CSAE 2022, 38, 40–50. [Google Scholar]
- Villette, S.; Piron, E.; Miclet, D. Hybrid centrifugal spreading model to study the fertiliser spatial distribution and its assessment using the transverse coefficient of variation. Comput. Electron. Agric. 2017, 137, 115–129. [Google Scholar] [CrossRef]
- Chojnacki, J.; Berner, B. The influence of air stream generated by drone rotors on transverse distribution pattern of sown seeds. J. Res. Appl. Agric. Eng. 2018, 63, 9–12. [Google Scholar]
- Tang, Y.; Fu, Y.; Guo, Q.; Huang, H.; Tan, Z.; Luo, S. Numerical simulation of the spatial and temporal distributions of the downwash airflow and spray field of a co-axial eight-rotor plant protection UAV in hover. Comput. Electron. Agric. 2023, 206, 107634. [Google Scholar] [CrossRef]
- Song, C.; Liu, L.; Wang, G.; Han, J.; Zhang, T.; Lan, Y. Particle deposition distribution of multi-rotor UAV-based fertilizer spreader under different height and speed parameters. Drones 2023, 7, 425. [Google Scholar] [CrossRef]
- Song, C.; Zhou, Z.; Zang, Y.; Zhao, L.; Yang, W.; Luo, X.; Jiang, R.; Ming, R.; Zang, Y.; Zi, L.; et al. Variable-rate control system for UAV-based granular fertilizer spreader. Comput. Electron. Agric. 2020, 180, 105832. [Google Scholar] [CrossRef]
- Xiao, H.; Li, Y.; Yuan, L.; Zhang, Z. Application and Prospect of China Agricultural Unmanned Aerial Vehicle in Rice Production. J. Guangxi Agric. Sci. 2021, 48, 139–147. [Google Scholar]
- Song, C.; Zhou, Z.; Jiang, R.; Luo, X.; He, X.; Ming, R. Design and parameter optimization of pneumatic rice sowing device for unmanned aerial vehicle. Trans. CSAE 2018, 34, 80–88. [Google Scholar]
- Liu, W.; Zou, S.; Xu, X.; Gu, Q.; He, W.; Huang, J.; Huang, J.; Lyu, Z.; Lin, J.; Zhou, Z.; et al. Development of UAV-based shot seeding device for rice planting. Int. J. Agric. Biol. Eng. 2022, 15, 1–7. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Height X1/cm | Working Speed X2 (r/min) | Diameter X3/mm |
|---|---|---|---|
| −1 | 120 | 45 | 40 |
| 0 | 140 | 60 | 50 |
| 1 | 160 | 75 | 60 |
| Test Number | X1 | X2 | X3 | Spacing Pass Rate Y1/% | Uprightness Pass Rate Y2/% |
|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 80.6 | 82.2 |
| 2 | 1 | −1 | 0 | 86.6 | 83.2 |
| 3 | −1 | 1 | 0 | 83.8 | 85.3 |
| 4 | 0 | 1 | 0 | 88.4 | 88.2 |
| 5 | 0 | 1 | −1 | 86.1 | 86.2 |
| 6 | −1 | 1 | 1 | 82.2 | 83.7 |
| 7 | −1 | −1 | 0 | 87.8 | 85.6 |
| 8 | 0 | 1 | 0 | 87.6 | 87.2 |
| 9 | 0 | 1 | 1 | 78.8 | 83.1 |
| 10 | 1 | 1 | 0 | 84.2 | 82.8 |
| 11 | 0 | 1 | 0 | 88.2 | 87.8 |
| 12 | 0 | −1 | −1 | 86.7 | 87.4 |
| 13 | 0 | 1 | 0 | 88.2 | 87.4 |
| 14 | 1 | 1 | −1 | 85.8 | 85.2 |
| 15 | −1 | 1 | −1 | 86.8 | 86.2 |
| 16 | 0 | −1 | 1 | 81.7 | 83.4 |
| 17 | 0 | 1 | 0 | 87.2 | 88.6 |
| Variance Source | Degree of Freedom | Sum of Squares | Mean Square | F Value | p Value | ||||
|---|---|---|---|---|---|---|---|---|---|
| Y1 | Y2 | Y1 | Y2 | Y1 | Y2 | Y1 | Y2 | ||
| Model | 9 | 135.47 | 67.87 | 15.05 | 7.54 | 32.47 | 21.7 | <0.0001 | 0.0003 |
| X1 | 1 | 1.44 | 6.85 | 1.44 | 6.85 | 3.12 | 19.7 | 0.1208 | 0.003 |
| X2 | 1 | 12.25 | 0.61 | 12.25 | 0.61 | 26.42 | 1.74 | 0.0013 | 0.2285 |
| X3 | 1 | 61.05 | 19.85 | 61.05 | 19.85 | 131.68 | 57.12 | <0.0001 | 0.0001 |
| X1X2 | 1 | 0.64 | 0.0025 | 0.64 | 0.0025 | 1.38 | 0.0072 | 0.2785 | 0.9348 |
| X1X3 | 1 | 0.09 | 0.063 | 0.09 | 0.063 | 0.19 | 0.18 | 0.6728 | 0.6842 |
| X2X3 | 1 | 1.32 | 0.2 | 1.32 | 0.2 | 2.85 | 0.58 | 0.1351 | 0.4701 |
| X12 | 1 | 3.39 | 19.6 | 3.39 | 19.6 | 7.32 | 56.41 | 0.0304 | 0.0001 |
| X22 | 1 | 8.52 | 8.94 | 8.52 | 8.94 | 18.38 | 25.74 | 0.0036 | 0.0014 |
| X32 | 1 | 42.38 | 7.76 | 42.38 | 7.76 | 91.4 | 22.33 | <0.0001 | 0.0021 |
| Residual | 7 | 3.25 | 2.43 | 0.46 | 0.35 | ||||
| Lack of fit | 3 | 2.24 | 1.12 | 0.75 | 0.37 | 2.96 | 1.14 | 0.1609 | 0.4346 |
| Pure terror | 4 | 1.01 | 1.31 | 0.25 | 0.33 | 0.41 | |||
| Cor total | 16 | 138.72 | 70.3 | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, P.; Yang, Y.; Wei, Y.; Zhang, W.; Ji, Y. Design and Experimentation of Rice Seedling Throwing Apparatus Mounted on Unmanned Aerial Vehicle. Agriculture 2024, 14, 847. https://doi.org/10.3390/agriculture14060847
Yuan P, Yang Y, Wei Y, Zhang W, Ji Y. Design and Experimentation of Rice Seedling Throwing Apparatus Mounted on Unmanned Aerial Vehicle. Agriculture. 2024; 14(6):847. https://doi.org/10.3390/agriculture14060847
Chicago/Turabian StyleYuan, Peichao, Youfu Yang, Youhao Wei, Wenyi Zhang, and Yao Ji. 2024. "Design and Experimentation of Rice Seedling Throwing Apparatus Mounted on Unmanned Aerial Vehicle" Agriculture 14, no. 6: 847. https://doi.org/10.3390/agriculture14060847
APA StyleYuan, P., Yang, Y., Wei, Y., Zhang, W., & Ji, Y. (2024). Design and Experimentation of Rice Seedling Throwing Apparatus Mounted on Unmanned Aerial Vehicle. Agriculture, 14(6), 847. https://doi.org/10.3390/agriculture14060847