
Design and Experiment of Toggle Lever-Type Potato Picker


Abstract
1. Introduction
2. Materials and Methods
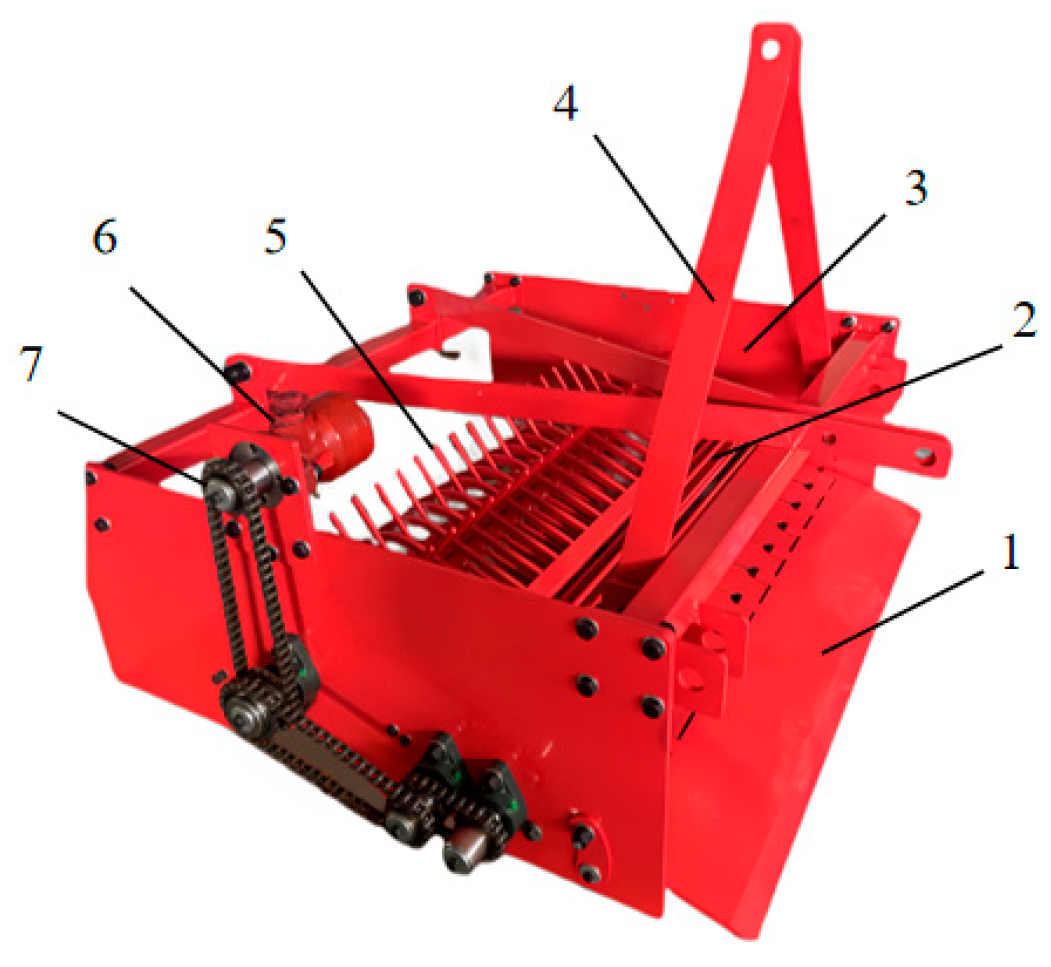
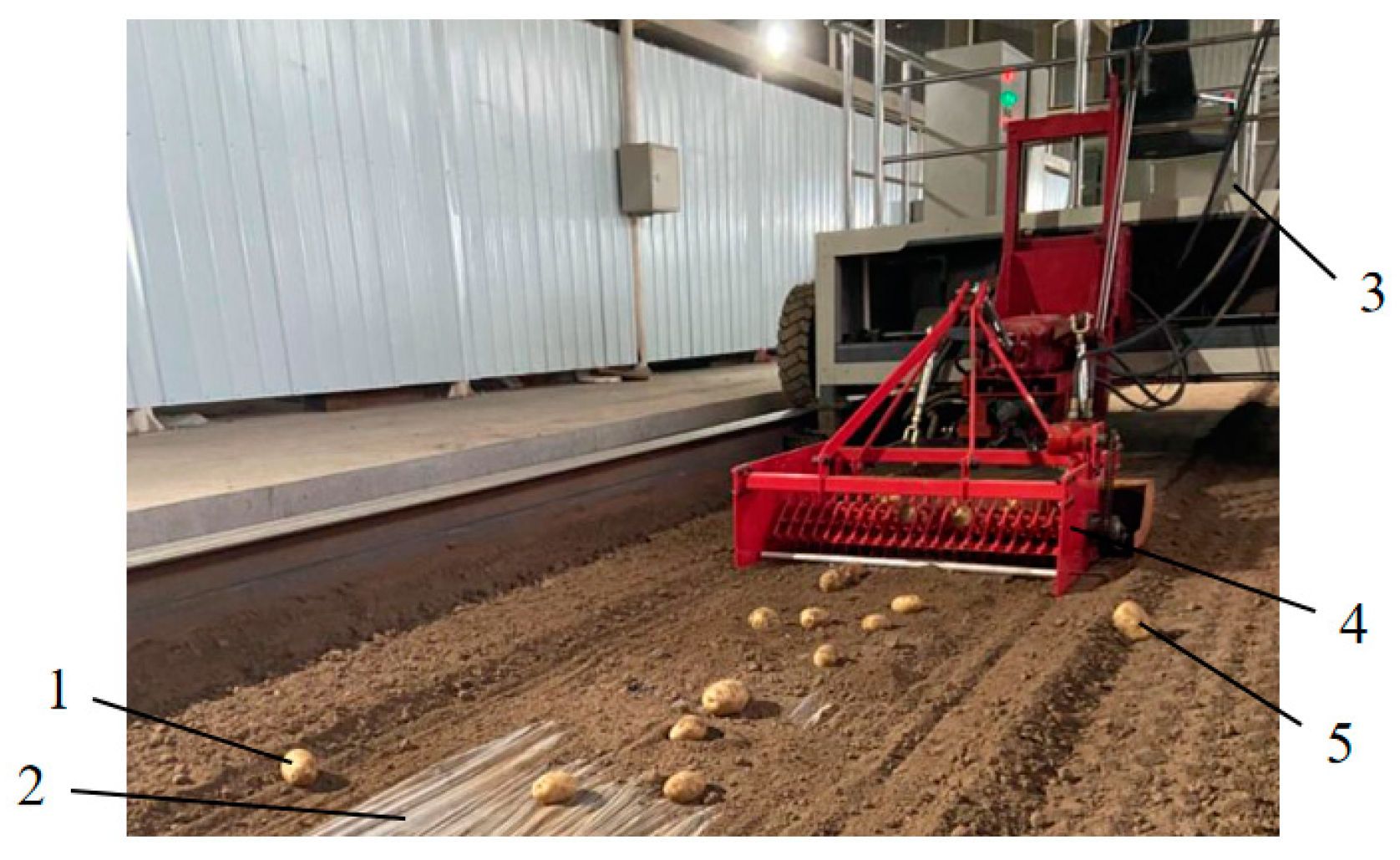
2.1. Overall Structure and Working Principle of the Toggle Lever-Type Potato Picker
2.2. Design of Key Components and Determination of Parameters
2.2.1. Transmission Design and Selection of Hydraulic Motor
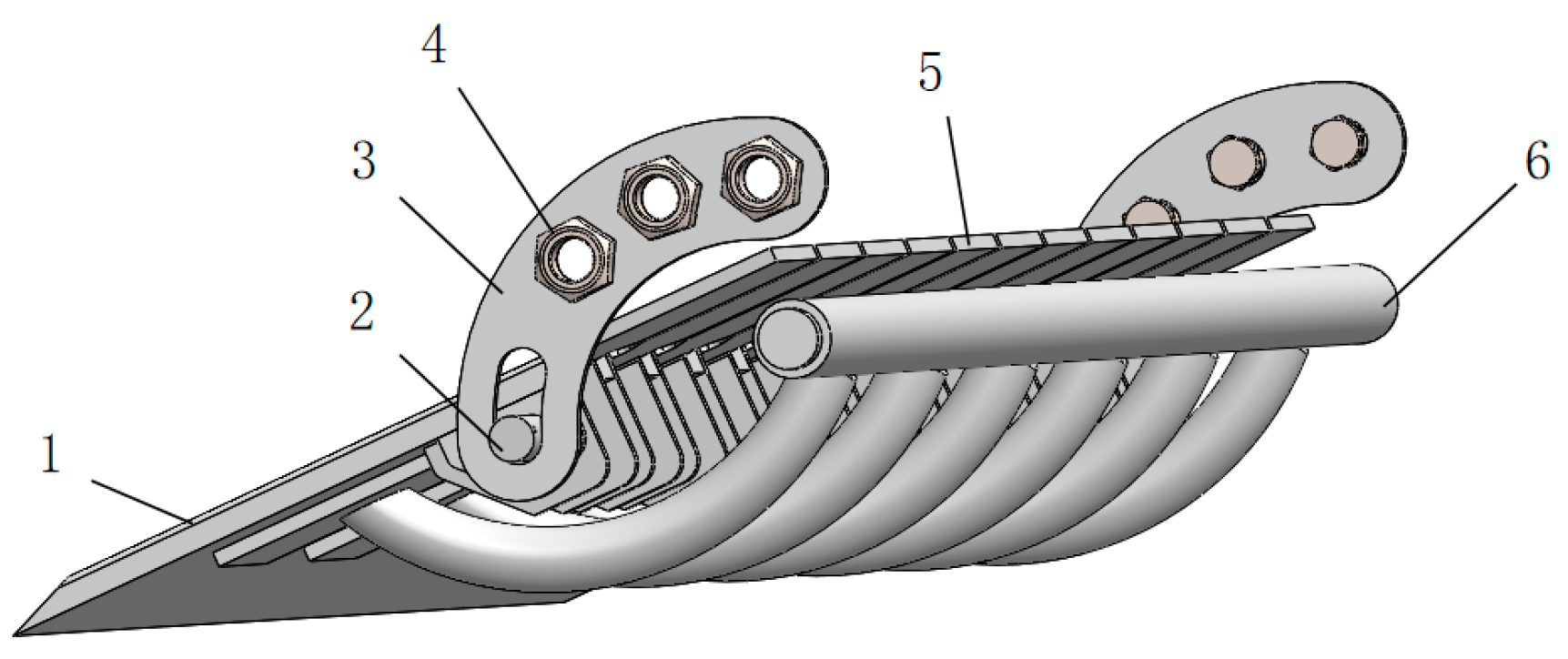
2.2.2. Picking Shovel
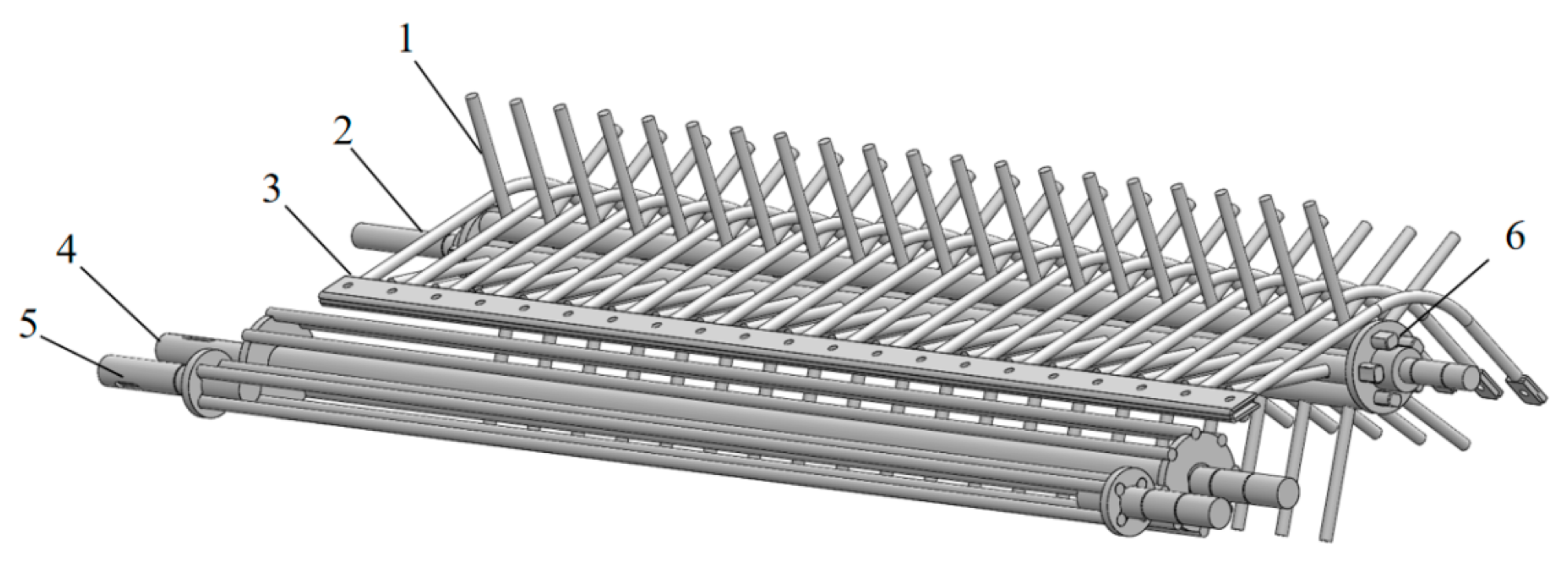
2.2.3. Auxiliary Picking Device
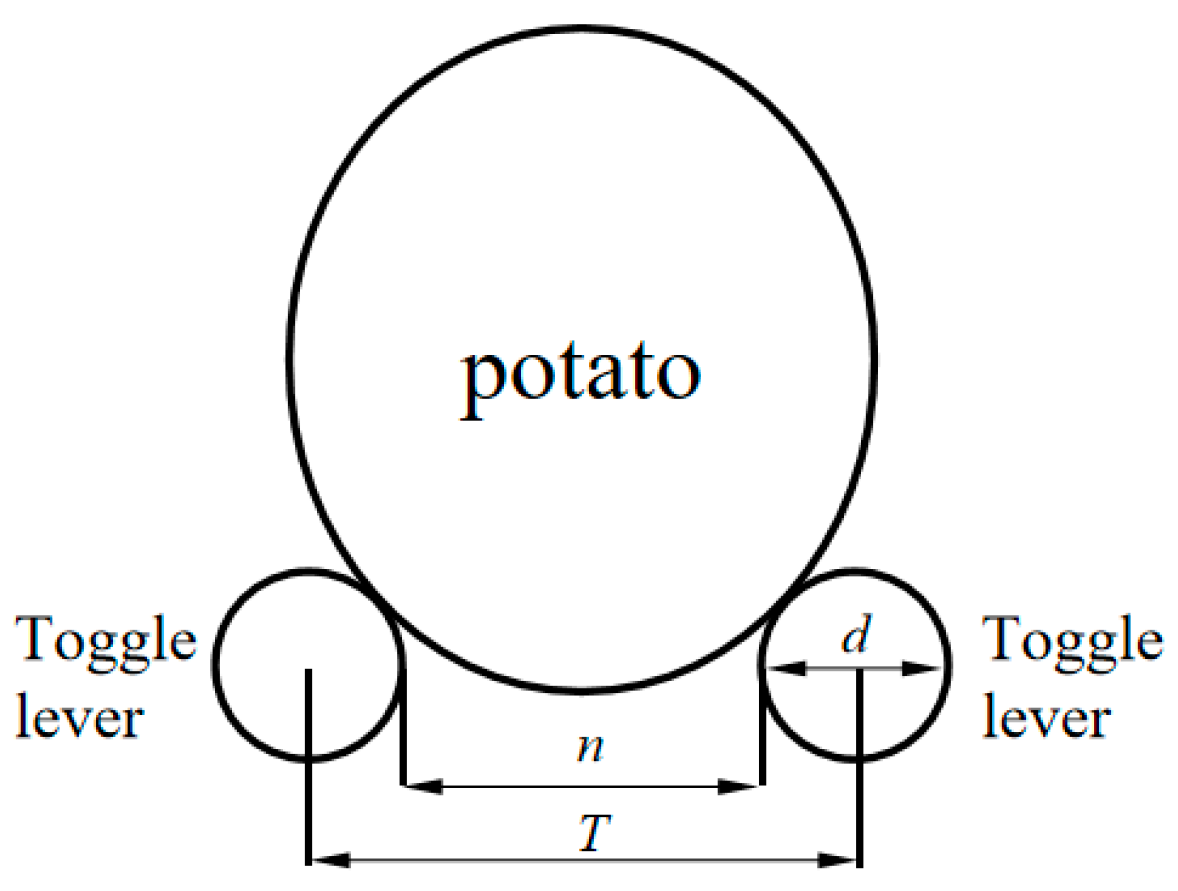
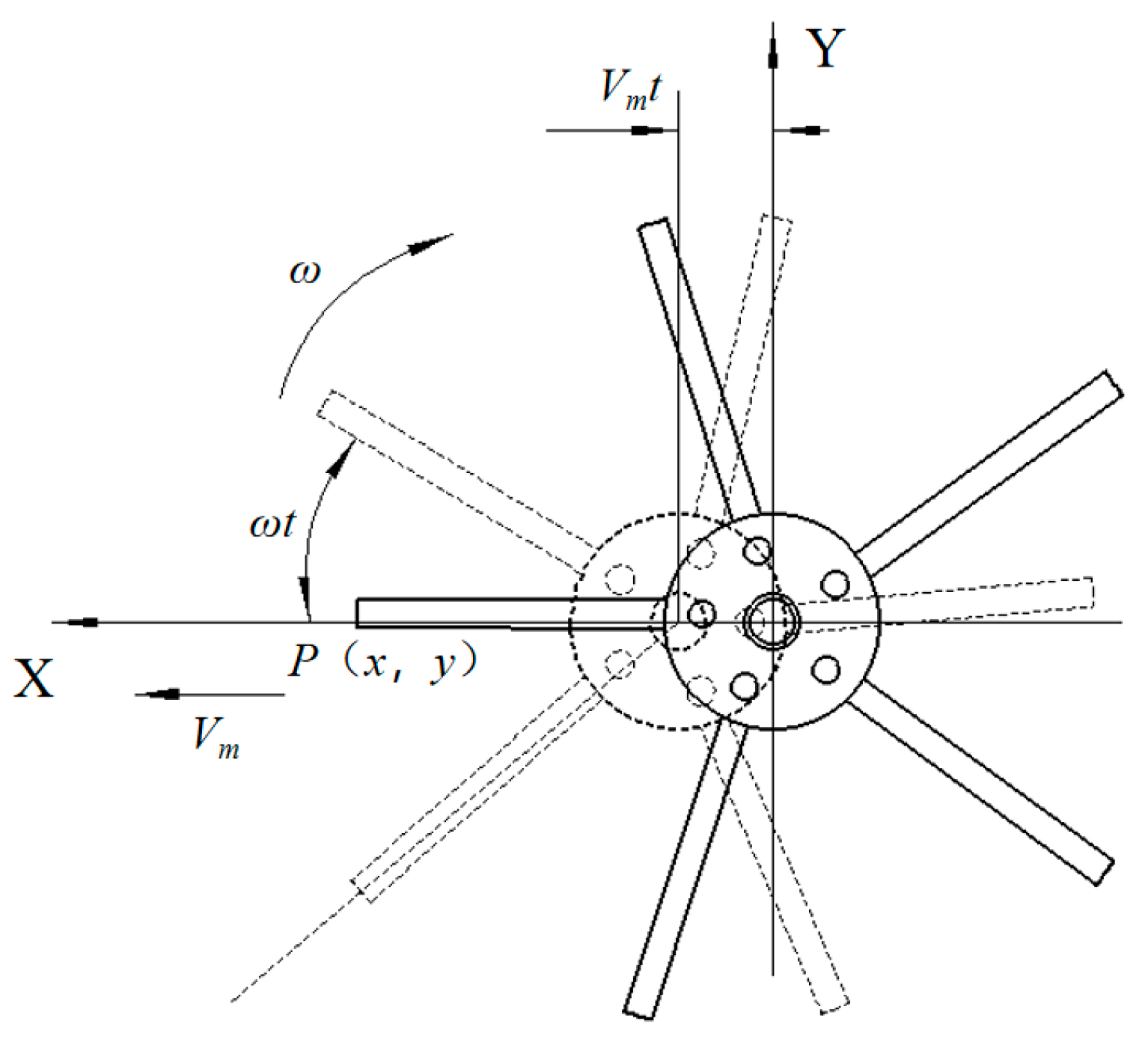
2.3. Kinematic Characteristics Analysis of Toggle Lever
2.4. Key Performance Evaluation Indicators of Potato Picker
2.5. The Design of Single-Factor Performance Experiment
2.5.1. Factors and Levels for Experiment
2.5.2. The Course of the Experiment
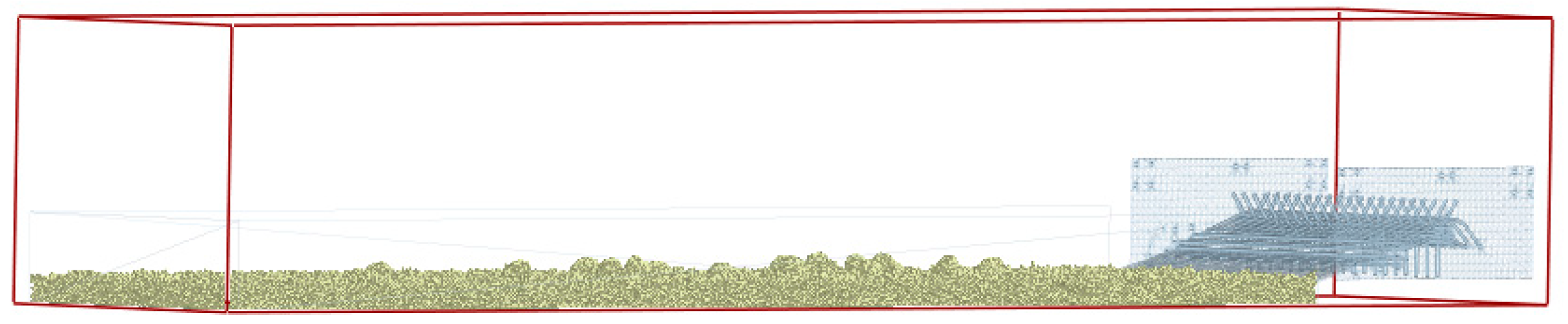
2.6. Discrete Element Simulation Experiment Design
2.6.1. Experimental Indicators
2.6.2. The Course of the Experiment
2.7. Experimental Design for Optimization of the Parameters of the Picker
2.8. The Field Experiment Design
3. Results and Discussion
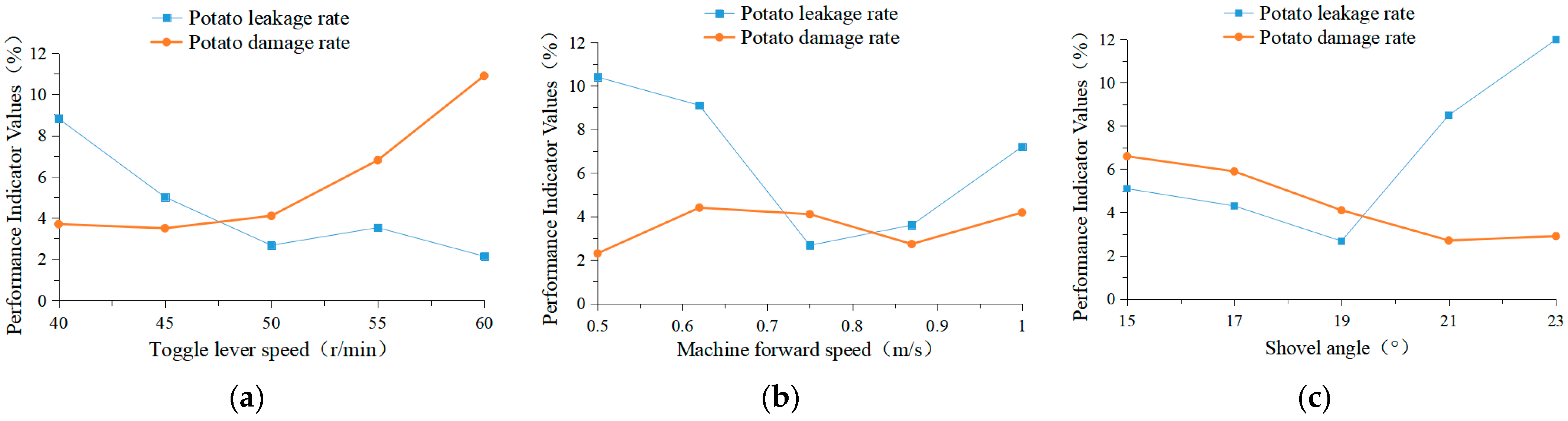
3.1. Analysis of the Results of the Single-Factor Performance Experiments
3.2. Analysis of Discrete Element Simulation Experiment Results
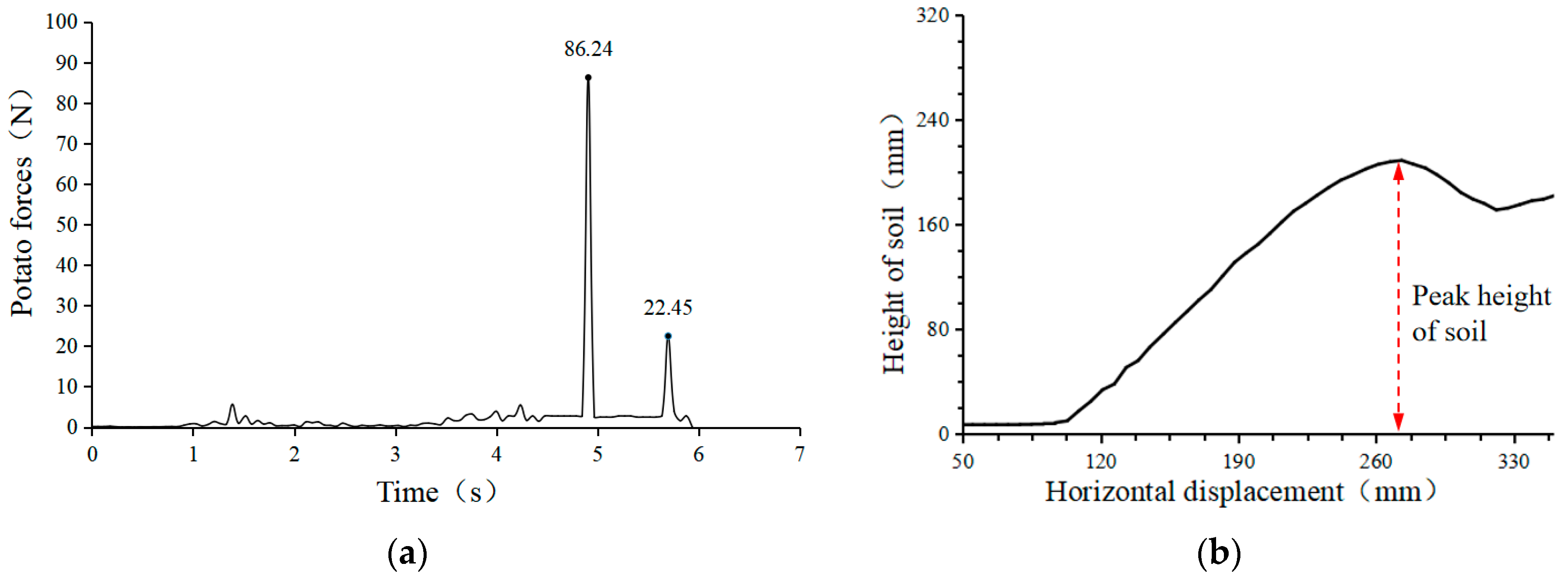
3.2.1. Analysis of Potato Force and Congestion during the Picking Process
3.2.2. Influence of Factors on the Peak Force of Potatoes
3.2.3. Influence of Factors on the Peak Height of Soil
3.3. Analysis of Response Surface Experiments Results
3.3.1. Analysis of Variance
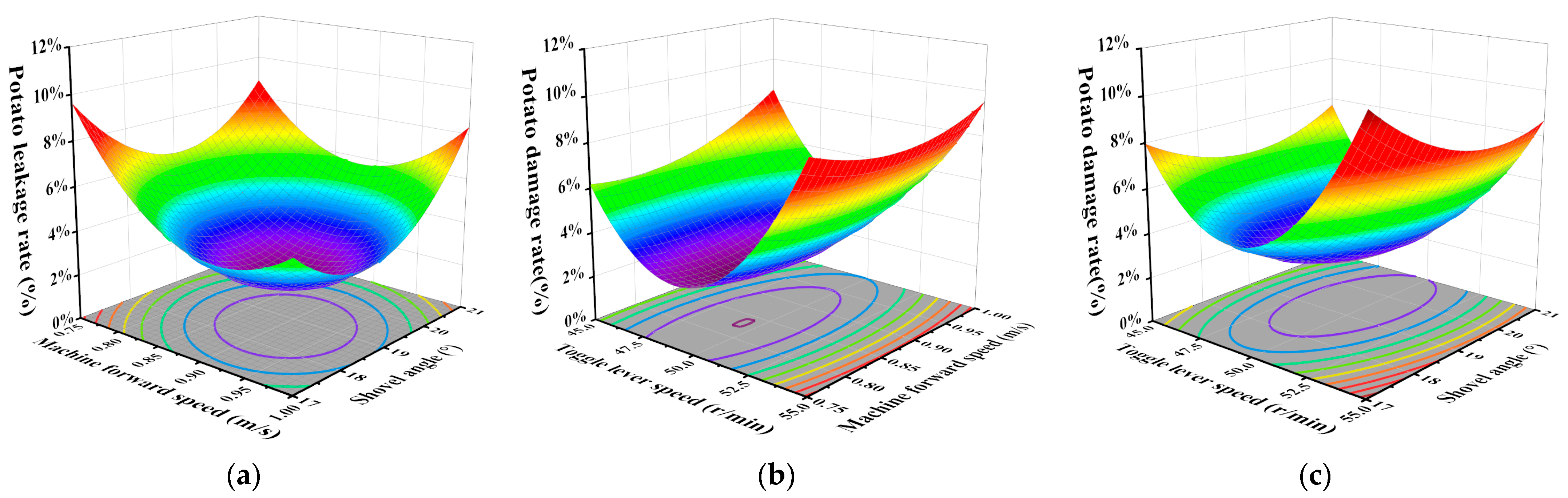
3.3.2. Factor Interaction Analyses
3.4. The Field Experiment Results
4. Conclusions
- In response to the issues of excessive soil accumulation and potato damage caused during potato picking, a toggle lever-type potato picker was designed, achieving effective potato manipulation and conveying.
- The theoretical optimal working parameter combination for the picker is a toggle lever speed of 50 r/min, a machine forward speed of 0.9 m/s, and a shovel angle of 19°.
- Under optimal operating parameters, the performance indicators of the picker meet the requirements of the mechanized potato picking technical specifications (the potato leakage rate is 2.32% ≤ 5%, the potato damage rate is 2.72% ≤ 6%).
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, Z.; Chang, Q.; Liu, J.; Dong, X. Development Status and Trend of Domestic and Overseas Potato Harvesters. Mod. Manuf. Technol. Equip. 2020, 56, 207–208. [Google Scholar] [CrossRef]
- Chen, H.; Liu, Q. The Research Progress and Prospect of Potato Peeling Technology. Food Ind. 2016, 37, 229–232. [Google Scholar]
- Yao, Y.; Yang, J.; Xiao, G.; Zhao, H.; Lei, J.; Niu, H.; Zhang, X. Progress and Prospect of Research on the Impact of Climate Warming on Potato Growth and Yield. Ecol. Environ. Sci. 2017, 26, 538–546. [Google Scholar] [CrossRef]
- Johnson, C.M.; Auat Cheein, F. Machinery for Potato Harvesting: A State-of-the-Art Review. Front. Plant Sci. 2023, 14, 1156734. [Google Scholar] [CrossRef] [PubMed]
- Alatyrev, S.S.; Kruchinkina, I.S.; Alatyrev, A.S. Justification of a New Technical Solution for the Development of Potato Harvesting Machines. Trakt. Sel Hozmashiny 2020, 87, 17–23. [Google Scholar] [CrossRef]
- Lv, J.; Tian, Z.; Yang, Y.; Shang, Q.; Wu, J.; Li, Z.; Wang, X. The Development Situation, Existing Problems and Development Trend of Potato Machinery. J. Agric. Mech. Res. 2015, 37, 258–263. [Google Scholar] [CrossRef]
- Lv, J.; Sun, H.; Yue, H.; Peng, M.; Yu, J. Design and Experiment on Conveyor Separation Device of Potato Digger under Heavy Soil Condition. Trans. Chin. Soc. Agric. Mach. 2017, 48, 146–155. [Google Scholar]
- Li, H.; Gao, F. Improvement Design of Separation and Conveying Machinery and Equipment of Potato Excavator in Heavy Soil. Phys. Chem. Earth Parts ABC 2023, 130, 103363. [Google Scholar] [CrossRef]
- Yang, F.; Sun, G.; Zheng, X.; Wei, H.; Chai, S. Research Status and Development Trend of Potato Harvesters. For. Mach. Woodwork. Equip. 2021, 49, 4–10. [Google Scholar] [CrossRef]
- Duskulov, A.A.; Makhmudov, K.S. Improved Potato Digger. IOP Conf. Ser. Earth Environ. Sci. 2021, 868, 012055. [Google Scholar] [CrossRef]
- Liu, Y. Study on the Keyparameters of Potato Picker. Master’s Thesis, North West Agriculture and Forestry University, Xianyang, China, 2015. [Google Scholar]
- Fan, X. Design and Performance Test Research of Spring-Tooth Potato Picker. Master’s Thesis, Inner Mongolia Agricultural University, Hohhot, China, 2022. [Google Scholar]
- Shi, L.; Wu, J.; Zhao, W.; Sun, W.; Wang, D.; Li, H.; Liu, Q. Design and experiment on potato digger of disc ce-grate type. Trans. Chin. Soc. Agric. Eng. 2012, 28, 15–21. [Google Scholar]
- Yang, J.; Li, G.; Hao, L.; Chen, W.; Ye, T. Research on the development status and main function structure of potato picker. Agric. Mach. Use Maint. 2019, 3, 15–16. [Google Scholar]
- Jia, B.; Sun, W.; Zhao, Z.; Wang, H.; Zhang, H.; Liu, H. Design and Field Test of a Remotely Controlled Self-propelled Potato Harvester with Manual Sorting Platform. Am. J. Potato Res. 2023, 100, 193–209. [Google Scholar] [CrossRef]
- Xiao, W.; Gao, Y.; Chen, H.; Zhang, Y. Design and experiment of small potato picking and grading machine. Agric. Mech. Res. 2019, 12, 130–134. [Google Scholar]
- Beznosyuk, R.V.; Evtekhov, D.V.; Borychev, S.N.; Kostenko, M.Y.; Rembalovich, G.K. Justification of Parameters of a Finger Hump of Potato Harvesters When Vibrating Canvas. IOP Conf. Ser. Earth Environ. Sci. 2022, 981, 042051. [Google Scholar] [CrossRef]
- Wang, L.; Liu, F.; Wang, Q.; Zhou, J.; Fan, X.; Li, J.; Zhao, X.; Xie, S. Design of a Spring-Finger Potato Picker and an Experimental Study of Its Picking Performance. Agriculture 2023, 13, 945. [Google Scholar] [CrossRef]
- Zhou, J.; Cai, H.; Hu, G.; Chen, Y.; Chen, J. Design and Experiment of Potato Digging Shovel Based on Single Ridge Double Row Planting Agronomy. J. Agric. Mech. Res. 2024, 46, 191–195. [Google Scholar] [CrossRef]
- Li, J.; Gu, T.; Li, X.; Wang, Z.; Hu, B.; Ma, Y. Analysis and experiment of the bionic drag reduction characteristics of potato digging shovels on clayey black soil conditions. Trans. Chin. Soc. Agric. Eng. 2023, 39, 1–9. [Google Scholar]
- Ma, W.; Song, Q.; Gao, X.; Zhao, J.; Ma, C. Design and Experiment of Saposhnikovia Divaricata Bionic Digging Shovel. J. Agric. Mech. Res. 2024, 46, 64–72. [Google Scholar] [CrossRef]
- Zheng, Y.; Guo, D.; Wang, Z.; Yang, R. Improved Design and Experiment of Potato Digging Shovel. J. Agric. Mech. Res. 2021, 43, 137–140. [Google Scholar] [CrossRef]
- Deng, W. Study on the Collision Damage Characteristics and Peel Friction Damage Mechanisms of Potato Tubers. Ph.D. Thesis, Inner Mongolia Agricultural University: Hohhot, China, 2022. [Google Scholar]
- DB64/T 1795-2021; Technical Code of Practice for Mechanized Potato Picking. Ningxia Hui Autonomous Region Market Supervision Administration: Ningxia, China, 2021.
- Zhang, H. Analysis of Coal Transportation Efficiency of Horizontal Screw Conveyor Based on EDEM. Int. J. Front. Eng. Technol. 2023, 5, 58–64. [Google Scholar] [CrossRef]
- Zhu, H.; Qian, C.; Bai, L.; Li, H.; Mou, D.; Li, J. Optimization of discrete element model of corn stalk based on Plackett-Burmandesign and response surface methodology. J. China Agric. Univ. 2021, 26, 221–231. [Google Scholar]
- Liu, W.; Su, Q.; Fang, M.; Zhang, J.; Zhang, W.; Yu, Z. Parameters Calibration of Discrete Element Model for Corn Straw Cutting Based on Hertz-Mindlin with Bonding. Appl. Sci. 2023, 13, 1156. [Google Scholar] [CrossRef]
- Gai, X.; Xie, S.; Deng, W.; Lu, K.; Ji, X. Construction and parameter calibration of potato double-layer flexible bonding model based on discrete-element method. J. Food Process Eng. 2024, 47, e14602. [Google Scholar] [CrossRef]
- Wu, J.; Li, H.; Sun, W. Design of potato digger in poke finger’s wheeltype. Trans. Chin. Soc. Agric. Mach. 2010, 41, 76–79. [Google Scholar]
- Liu, T.; Cheng, Y.; Li, J. Feeding-type harvesting mechanism with the rotational lever for pineapple fruit. Trans. Chin. Soc. Agric. Eng. 2023, 39, 27–38. [Google Scholar]
- Xie, S. Theoretical and Experimental Investigations of Potato Soil Separation on Swing Separation Sieve. Ph.D. Thesis, Inner Mongolia Agricultural University, Hohhot, China, 2017. [Google Scholar]
- Wang, X.; Yang, D.; Liu, M.; Li, Y.; Chen, X.; Cheng, Z. Parameter Optimization and Experiment of Picking Device of Self-propelled Potato Collecting Machine. Trans. Chin. Soc. Agric. Mach. 2023, 54, 20–29. [Google Scholar]
- Chen, Z.; Duan, H.; Cai, X. Distribution characteristics of potato contact stress during the drop impact. J. South China Agric. Univ. 2020, 41, 99–108. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Type of Mechanical Equipment | Precision Machining Machine | Semi-Precision Machining Machine | Rough Machining Machine Tool, Heavy-Duty Machine Tool | Agricultural Machinery | Hydraulic Press, Heavy Machinery, Medium to Large-Sized Excavator |
|---|---|---|---|---|---|
| Working pressure (Mpa) | 0.8~2 | 3~5 | 5~10 | 10~16 | 20~32 |
| Program | Parameter |
|---|---|
| Machine working width (mm) | 1050 |
| Picking shovel adjustment angle range (°) | 15–23 |
| Picking depth (mm) | 50–100 |
| Pick-up shovel length (mm) | 307 |
| Finger length (mm) | 130 |
| Toggle lever center distance (mm) | 50 |
| Levels | Factors | ||
|---|---|---|---|
| Toggle Lever Speed (r/min) | Machine Forward Speed (m/s) | Shovel Angle (°) | |
| 1 | 40 | 0.5 | 15 |
| 2 | 45 | 0.62 | 17 |
| 3 | 50 | 0.75 | 19 |
| 4 | 55 | 0.87 | 21 |
| 5 | 60 | 1 | 23 |
| Bonding Parameters | Value |
|---|---|
| Flesh particle-flesh particle unit area normal stiffness/tangential stiffness (N/m3) | 4.39 × 109 |
| Flesh particle-flesh particle critical normal stress/tangential stress (Pa) | 5.5 × 109 |
| Peel particle-flesh particle unit area normal stiffness/tangential stiffness (N/m3) | 1.81 × 109 |
| Peel particle-flesh particle critical normal stress/tangential stress (Pa) | 2.2 × 109 |
| Peel particle-peel particle unit area normal stiffness (N/m3) | 4.55 × 109 |
| Peel particle-peel particle unit area tangential stiffness (N/m3) | 1.99 × 109 |
| Peel particle-peel particle critical normal stress (Pa) | 2.06 × 109 |
| Peel particle-peel particle critical tangential stress (Pa) | 4.55 × 109 |
| Soil Parameters | Values |
|---|---|
| Poisson’s ratio (N/m3) | 0.2 |
| Modulus of elaticity (MN/m2) | 13.5 |
| Density (g/cm3) | 1.38 |
| Coefficient of static friction | 0.81 |
| Coefficient of rolling friction | 0.2095 |
| Resting angle (°) | 35.53 |
| JKR surface enery coefficient | 0.356 |
| Particle radius (mm) | 2 |
| Levels | Toggle Lever Speed (r/min) | Machine Forward Speed (m/s) | Shovel Angle (°) |
|---|---|---|---|
| −1 | 45 | 0.75 | 17 |
| 0 | 50 | 0.87 | 19 |
| 1 | 55 | 1 | 21 |
| Experiment Number | Toggle Lever Speed: A | Machine Forward Speed: B | Shovel Angle: C | Y1: Potato Leakage Rate (%) | Y2: Potato Damage Rate (%) |
|---|---|---|---|---|---|
| 1 | 1(55) | 1(1) | 0(19) | 6.1 | 9.8 |
| 2 | 0(50) | −1(0.75) | 1(21) | 9.3 | 3.5 |
| 3 | −1(45) | −1 | 0 | 8.9 | 5.9 |
| 4 | 0 | 1 | −1(17) | 5.1 | 5.7 |
| 5 | 0 | 0(0.87) | 0 | 2.4 | 2.8 |
| 6 | 0 | 1 | 1 | 8.1 | 5.2 |
| 7 | −1 | 1 | 0 | 6.7 | 8.4 |
| 8 | 0 | 0 | 0 | 1.9 | 2.8 |
| 9 | 1 | 0 | 1 | 7.1 | 8.4 |
| 10 | 0 | 0 | 0 | 2.7 | 2.3 |
| 11 | 1 | −1 | 0 | 7.2 | 9.5 |
| 12 | 0 | 0 | 0 | 1.9 | 2.3 |
| 13 | −1 | 0 | 1 | 8.2 | 7.7 |
| 14 | 0 | −1 | −1 | 9.9 | 5.4 |
| 15 | 0 | 0 | 0 | 2.3 | 2.5 |
| 16 | 1 | 0 | −1 | 6.6 | 11.1 |
| 17 | −1 | 0 | −1 | 7.1 | 8.2 |
| Source | Y1 | Y2 | ||||||
|---|---|---|---|---|---|---|---|---|
| Sum of Squares | Degrees of Freedom | F | p | Sum of Squares | Degrees of Freedom | F | p | |
| Model | 0.0119 | 9 | 60.67 | <0.0001 ** | 0.0139 | 9 | 164.24 | <0.0001 ** |
| A | 0.0002 | 1 | 8.73 | 0.0213 * | 0.0009 | 1 | 98.50 | <0.0001 ** |
| B | 0.0011 | 1 | 49.64 | 0.0002 ** | 0.0003 | 1 | 30.68 | 0.0009 ** |
| C | 0.0002 | 1 | 9.18 | 0.0191 * | 0.0004 | 1 | 41.77 | 0.0003 ** |
| AB | 0.0000 | 1 | 1.39 | 0.2771 | 0.0001 | 1 | 12.89 | 0.0089 ** |
| AC | 0.000009 | 1 | 0.4133 | 0.5408 | 0.0001 | 1 | 12.89 | 0.0089 ** |
| BC | 0.0003 | 1 | 14.88 | 0.0062 ** | 0.0000 | 1 | 5.22 | 0.0562 |
| A2 | 0.0018 | 1 | 82.64 | <0.0001 ** | 0.0100 | 1 | 1068.34 | <0.0001 ** |
| B2 | 0.0036 | 1 | 164.56 | <0.0001 ** | 0.0004 | 1 | 43.08 | 0.0003 ** |
| C2 | 0.0036 | 1 | 167.39 | <0.0001 ** | 0.0009 | 1 | 91.74 | <0.0001 ** |
| Residual | 0.0002 | 7 | 0.0001 | 7 | ||||
| Lack of Fit | 0.0001 | 3 | 2.97 | 0.1599 | 0.0000 | 3 | 2.14 | 0.2376 |
| Pure Error | 0.0000 | 4 | 0.0000 | 4 | ||||
| Cor Total | 0.0120 | 16 | 0.0139 | 16 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, K.; Xie, S.; Gai, X.; Ji, X. Design and Experiment of Toggle Lever-Type Potato Picker. Agriculture 2024, 14, 826. https://doi.org/10.3390/agriculture14060826
Lu K, Xie S, Gai X, Ji X. Design and Experiment of Toggle Lever-Type Potato Picker. Agriculture. 2024; 14(6):826. https://doi.org/10.3390/agriculture14060826
Chicago/Turabian StyleLu, Kailiang, Shengshi Xie, Xiuzhi Gai, and Xinjie Ji. 2024. "Design and Experiment of Toggle Lever-Type Potato Picker" Agriculture 14, no. 6: 826. https://doi.org/10.3390/agriculture14060826
APA StyleLu, K., Xie, S., Gai, X., & Ji, X. (2024). Design and Experiment of Toggle Lever-Type Potato Picker. Agriculture, 14(6), 826. https://doi.org/10.3390/agriculture14060826