
The Mechanical Analysis and Comparative Performance Test of the Roller-Type Pulling Mechanism for the Whole Cotton Stalk Pulling Machine


Abstract
1. Introduction
2. Materials and Methods
2.1. Working Principle of the Pinch Roller Extraction Mechanism
2.1.1. Basic Working Principle
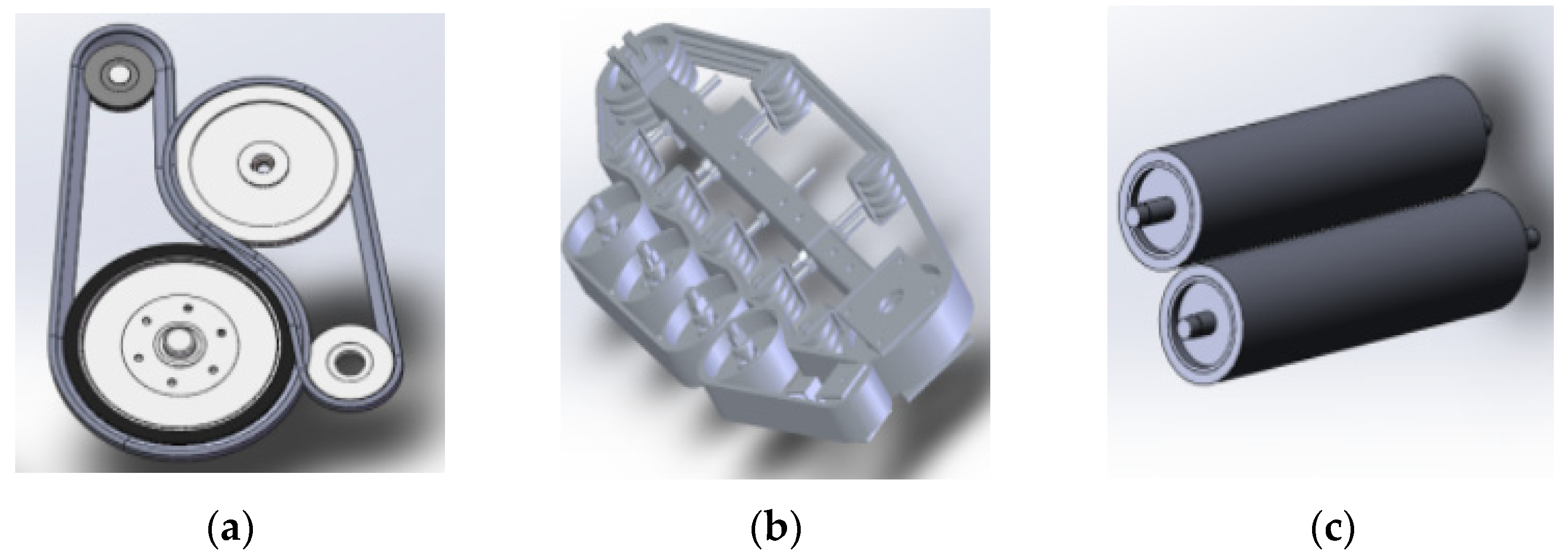
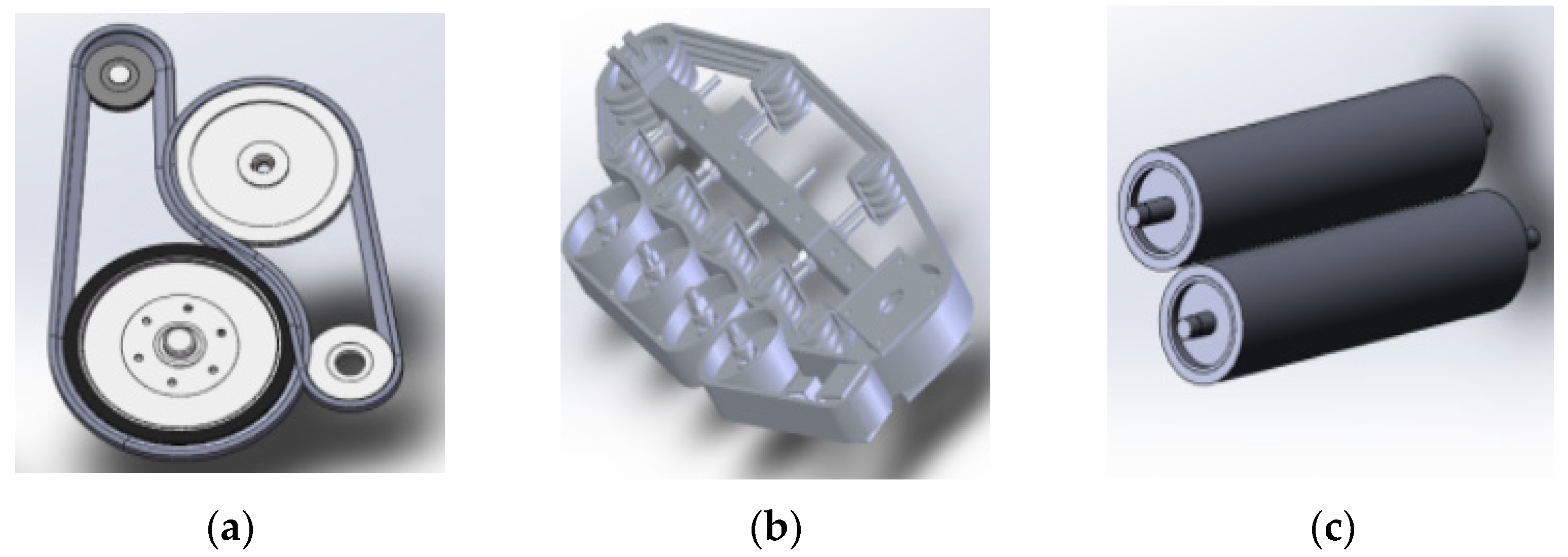
2.1.2. Types of Pinch Roller Extraction Mechanisms
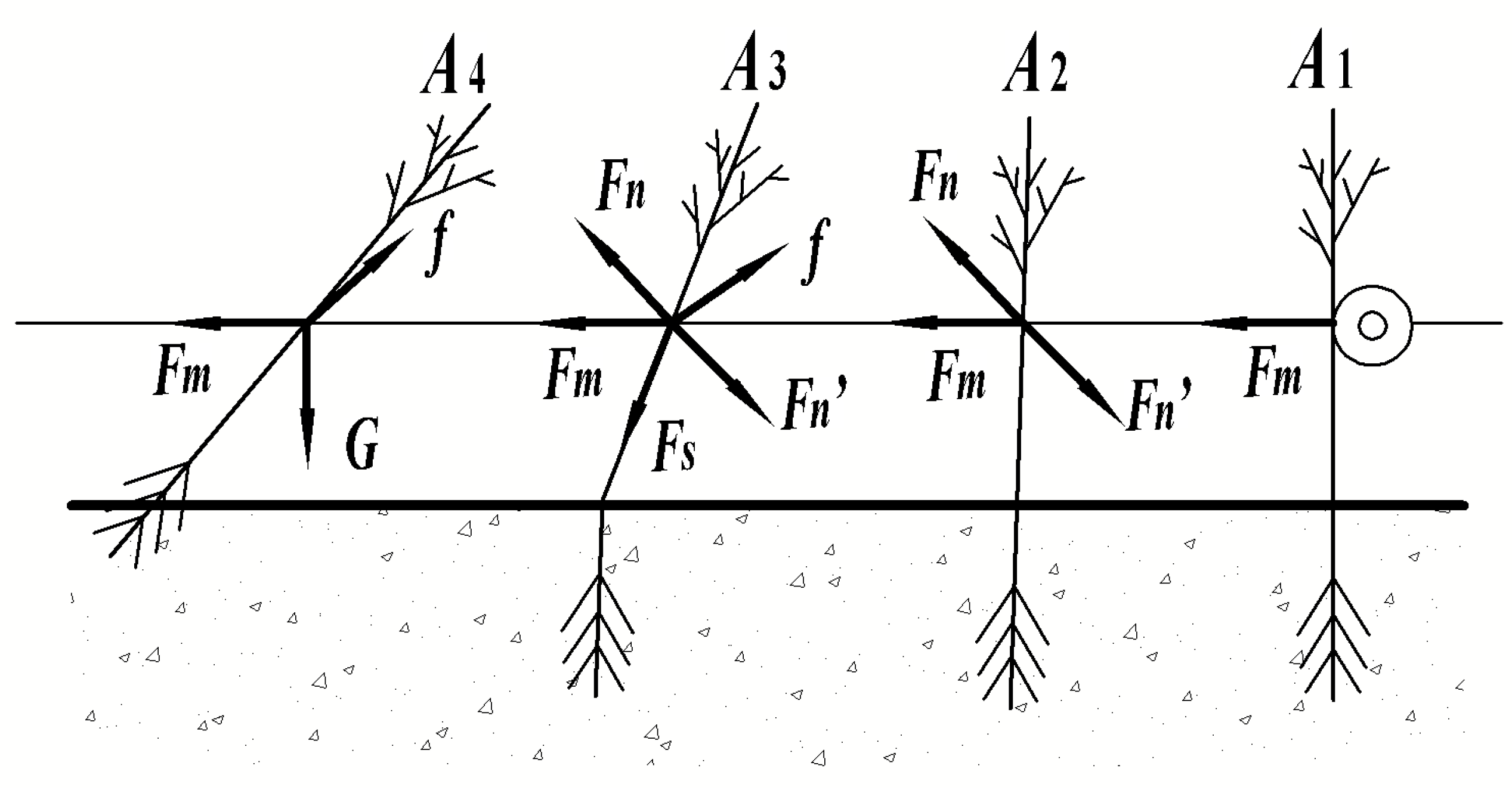
2.2. Mechanical Analysis of Nip-Roller-Type Cotton Stalk Whole Plant Plucking Mechanism
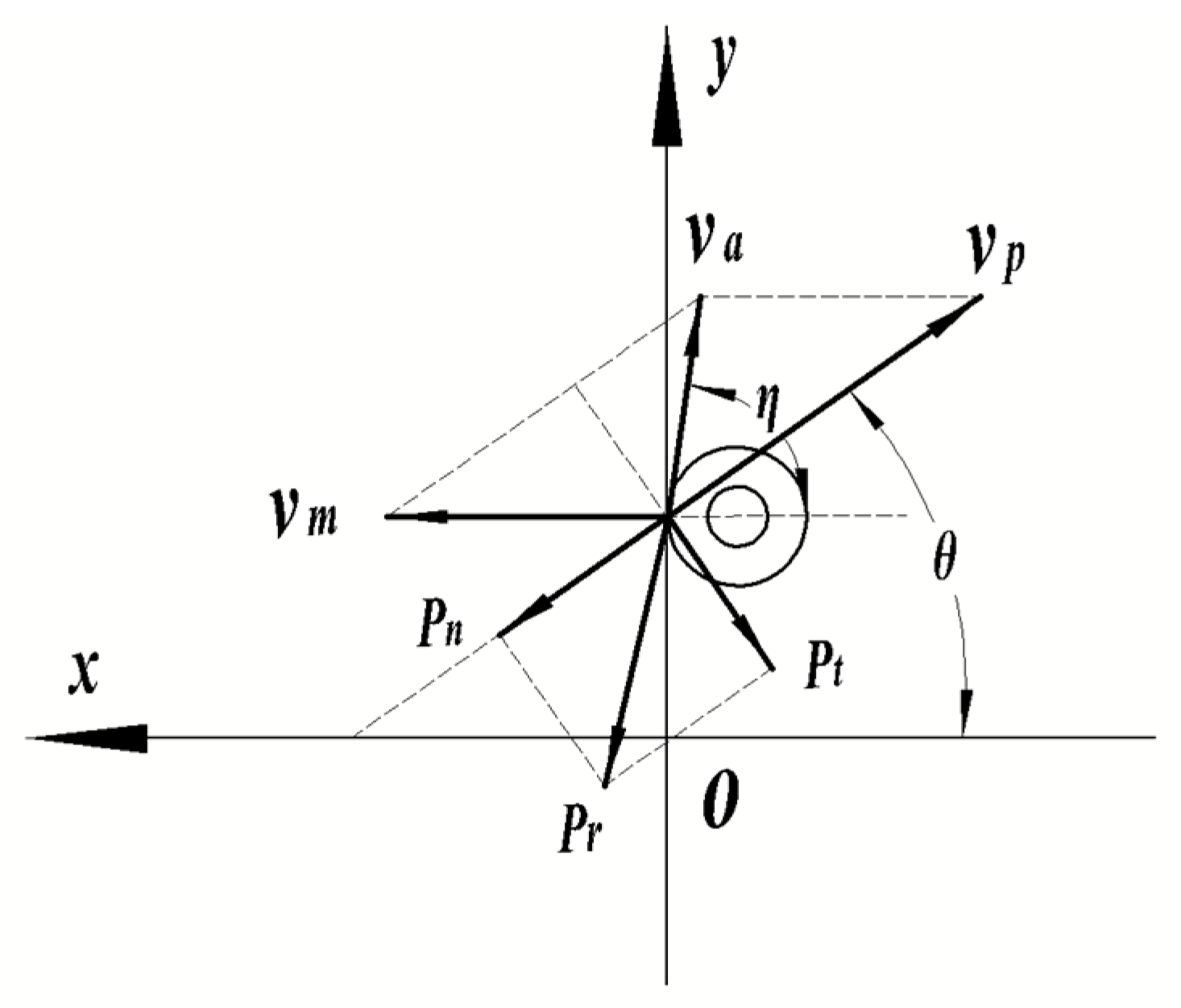
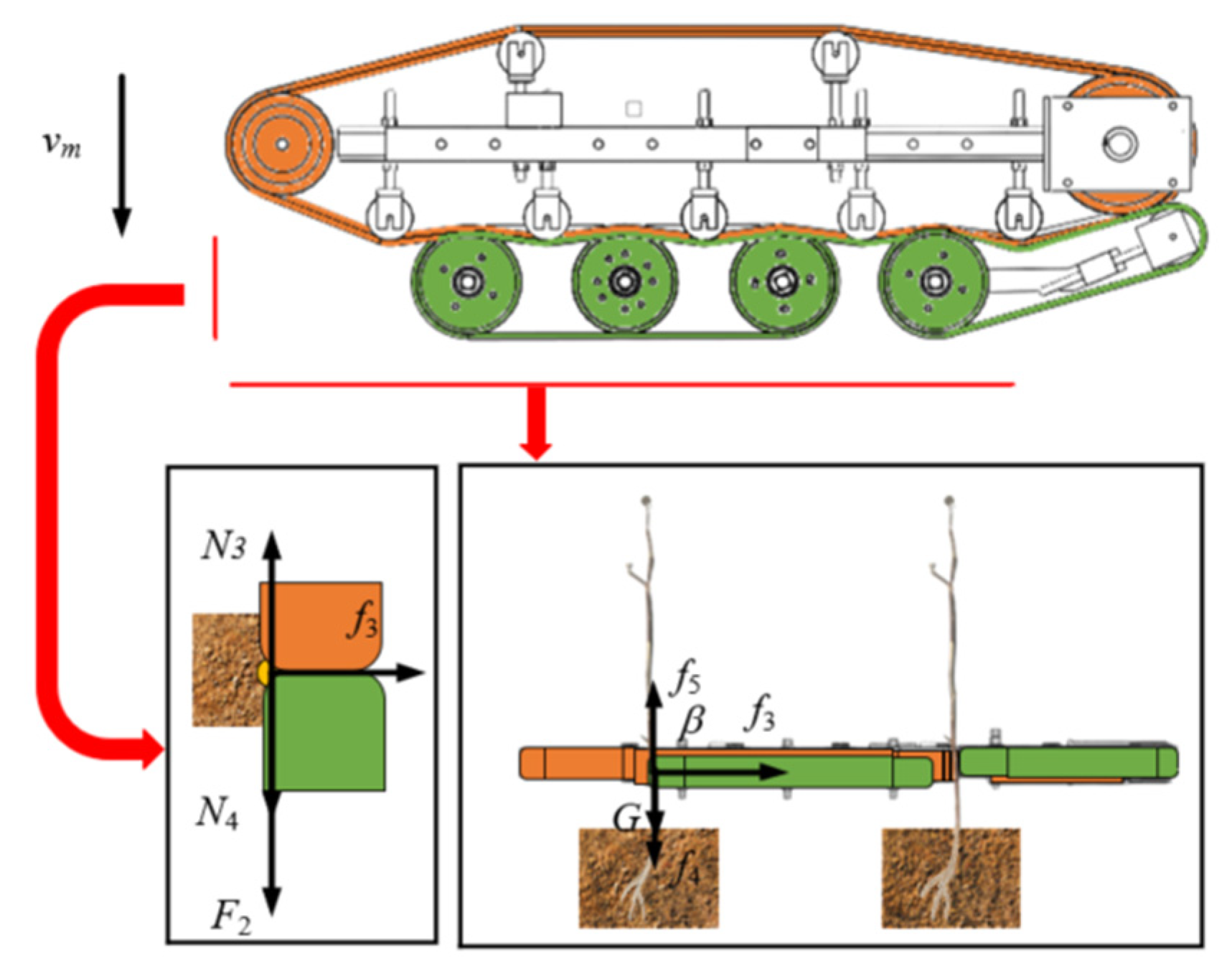
2.3. Analysis of Lifting Mechanism of Wrapping-Type Lifting Mechanism
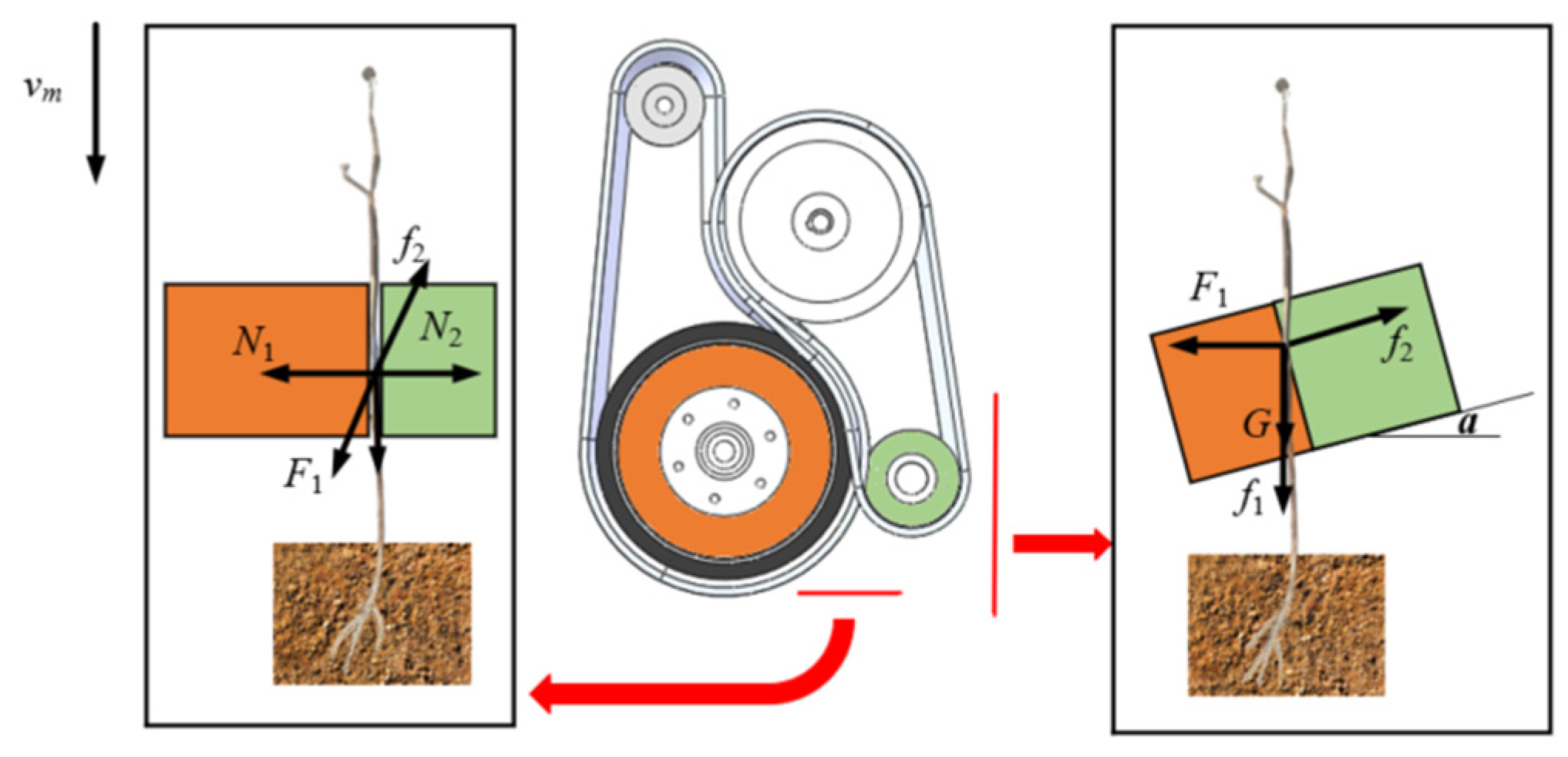
2.4. Clamping-Type Lifting Mechanism Lifting Mechanism Analysis
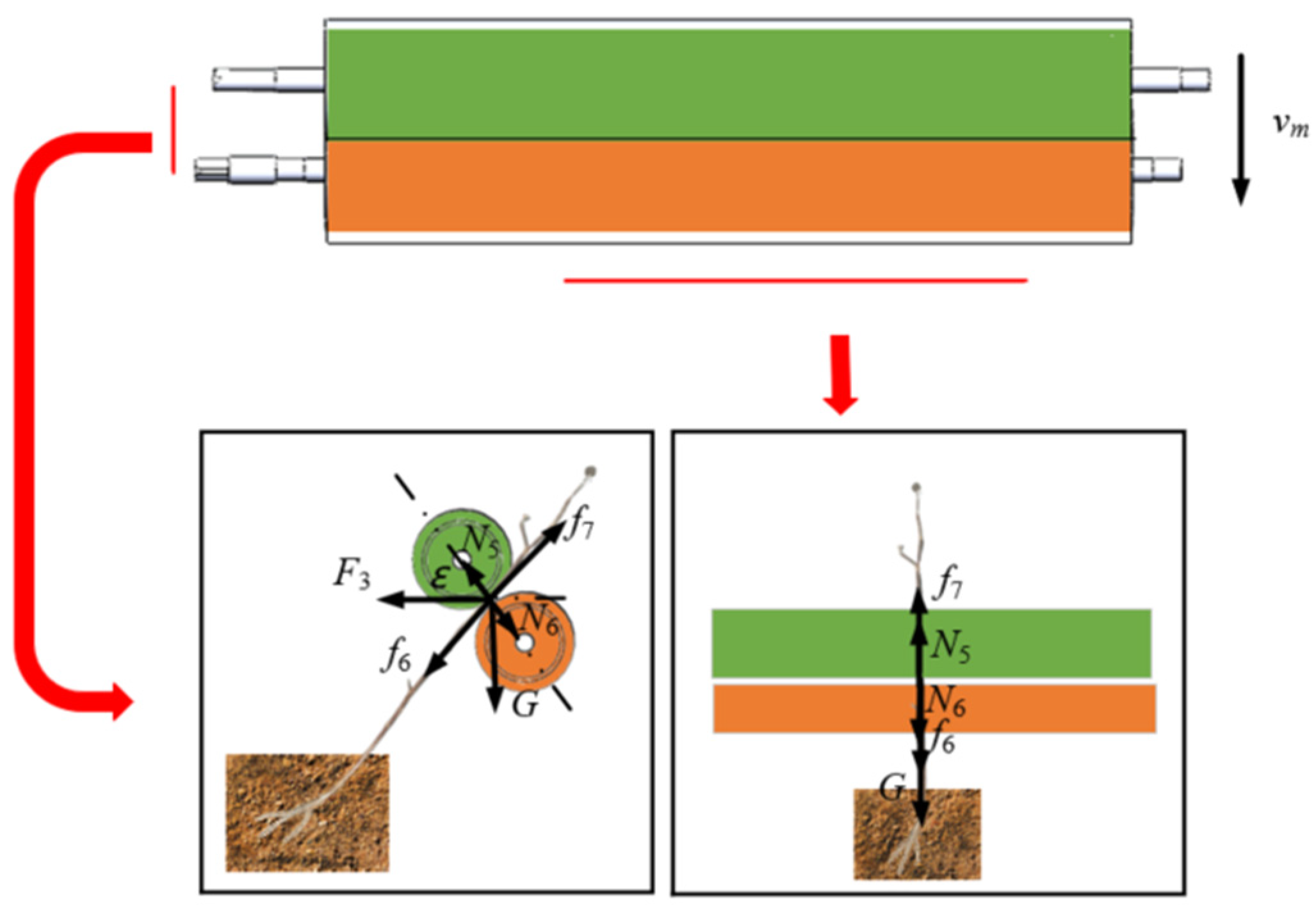
2.5. Cross Roller Drawing Mechanism Analysis of Pulling Mechanism
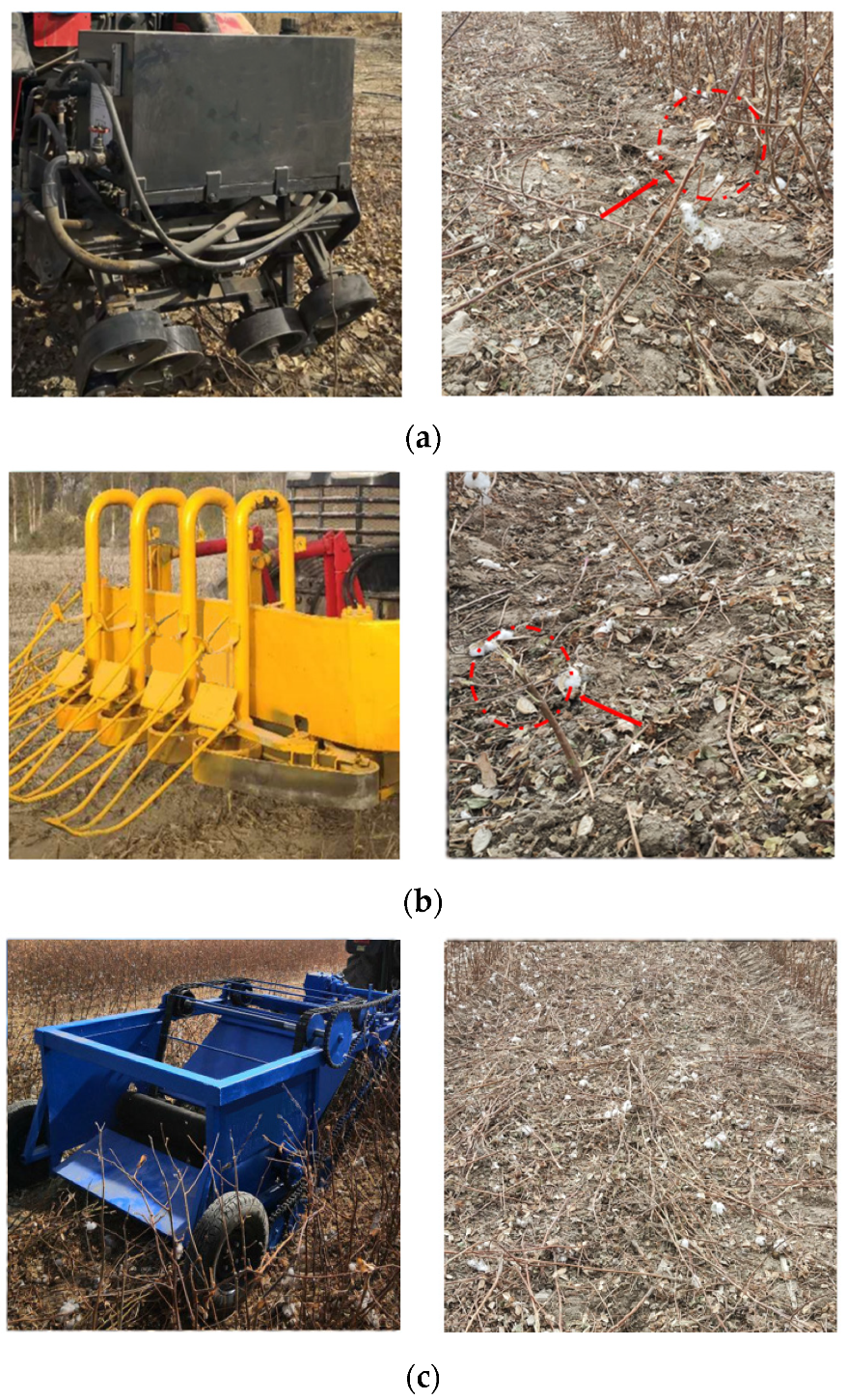
2.6. Comparative Test of Pinch Roller-Type Extraction Mechanism
2.6.1. Test Condition
2.6.2. Test Indicators and Methods
3. Results and Discussion
4. Conclusions
- 1.
- The size of the plucking force of the pinch roller-type straw pulling mechanism is directly proportional to the acceleration in the vertical direction at the moment of plucking, and the larger the combined acceleration is, the more the maximum static friction resistance to plucking resistance is. In the comparison of the three kinds of structure of the pinch roller-type cotton straw pulling mechanisms, the analysis and calculation results indicate that the clamping-type lifting mechanism pulling force is larger, but the initial feeding point of pulling is high and has low requirements. The wrapping-type lifting mechanism of the pulling force is small, while the cross roller drawing mechanism of the pulling force is in the middle, with most of its major advantages being the maximum width of the working width and the fact that it does not need to work in rows.
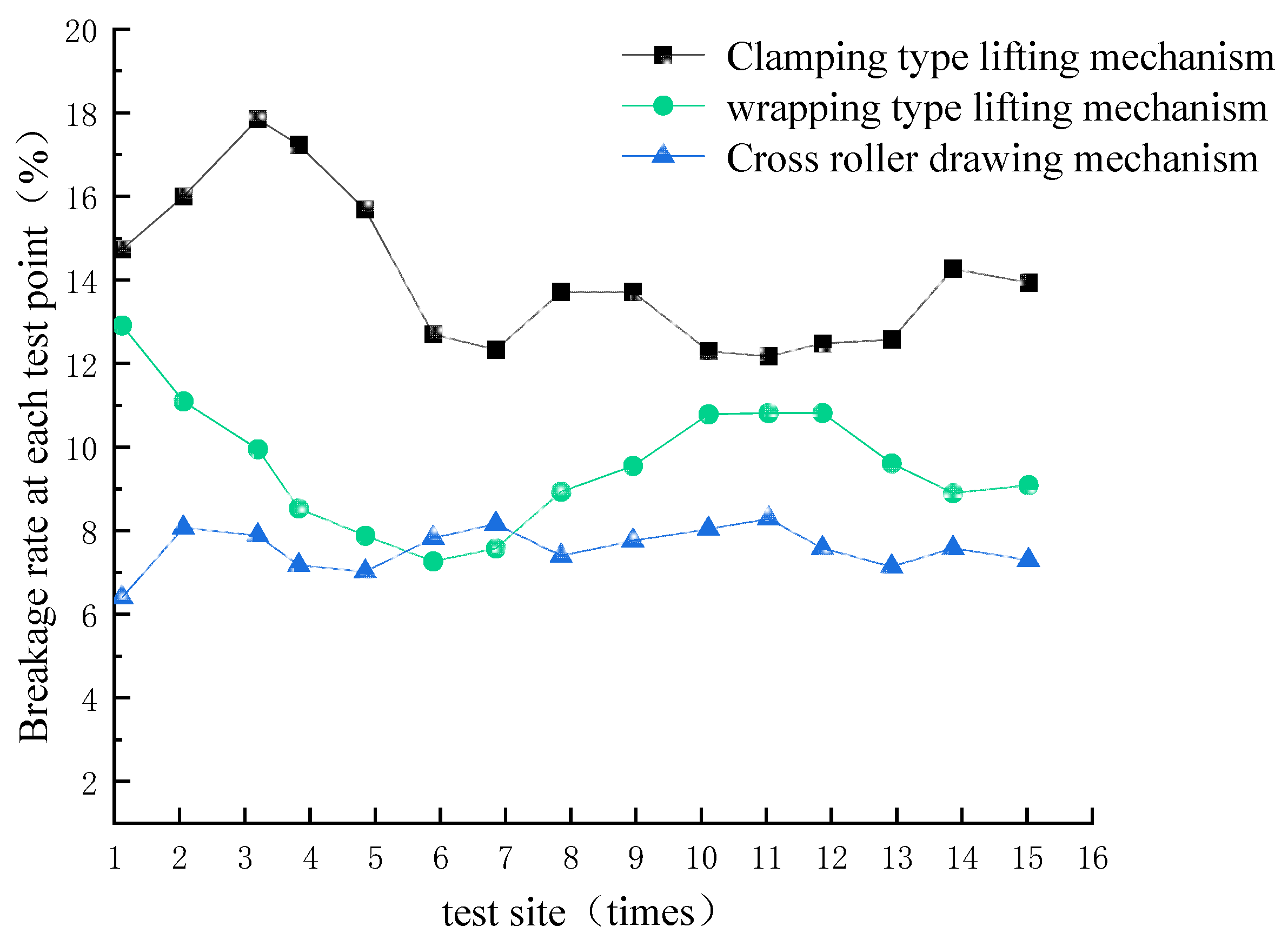
- 2.
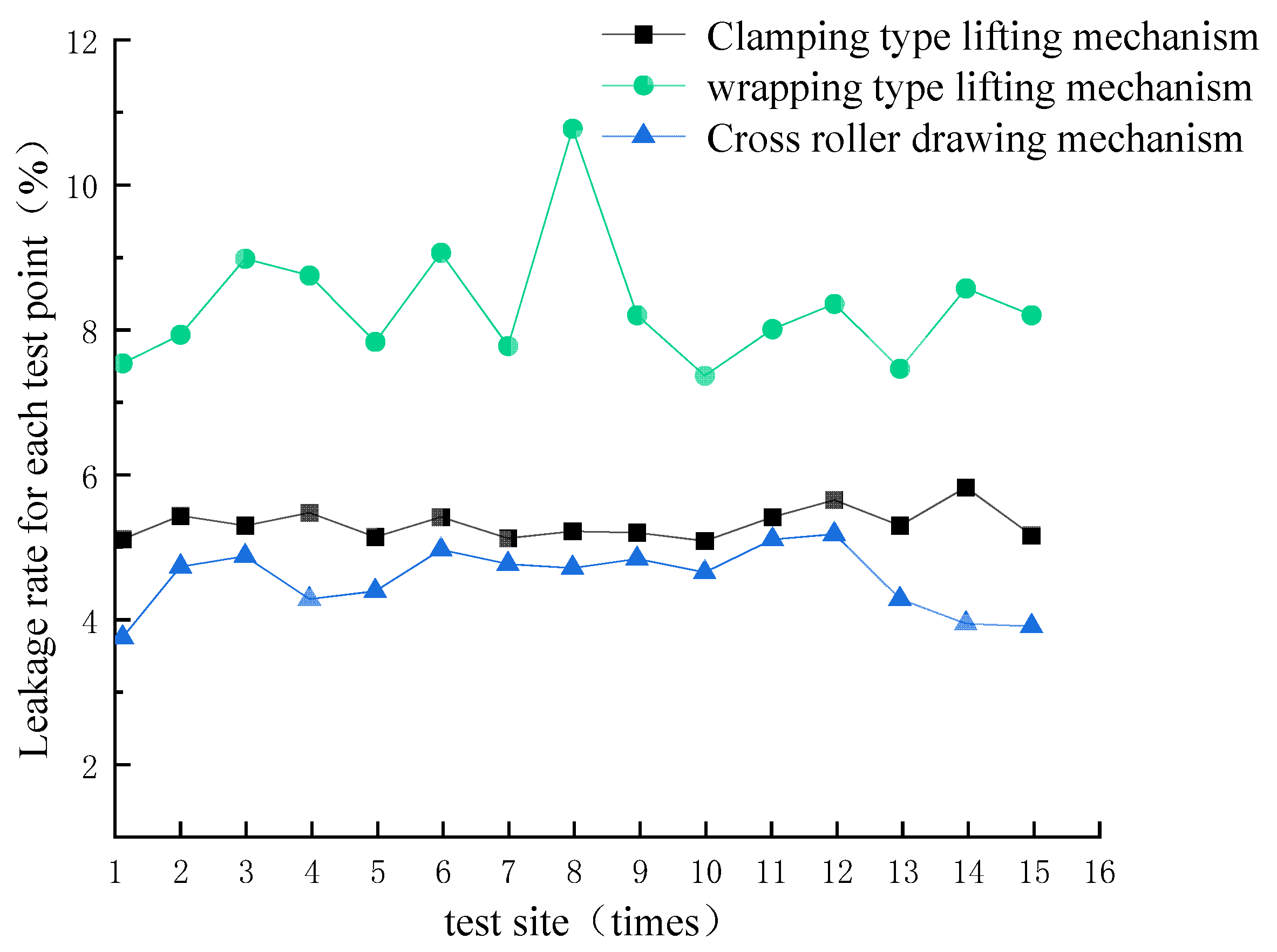
- The wrapping-type lifting mechanism, clamping-type lifting mechanism and cross roller drawing mechanism are three different kinds of plucking mechanisms installed in the test device to carry out the test of cotton stalk pulling. The test data of the X1, X2, X3 plucking mechanisms of the standard deviation of the leakage rate are 0.83%, 0.59%, 0.43%, the standard deviation of the pulling rate of the mean value are 1.48%, 1.79%, 0.49%, respectively. Through the field test, we see that the best mechanism is the cross roller drawing mechanism; although the pulling force is not the largest among the three, the cross roller drawing mechanism leaks less cotton stalks. The average leakage rate of cotton stalks is only 4.55%, and does not block the stalks. The measurement of the cotton stalks whole straw plucking mechanism as an indication of the quality of the operation is another key point. When the cotton straw plucking rate is low enough, the reason for this is that after the plucking of broken cotton stalks, they basically cannot enter the pinch roller gap, directly affecting the total amount of cotton stalks whole straw plucking. So, in order to pursue a high quality of operation regarding the straw plucking mechanism, reduce the average leakage rate of the cotton stalks whole straw plucking, and the average rate of pulling off the rows during work, using the cross roller-type pulling mechanism for whole straw pulling and harvesting after autumn is the best method.
- 3.
- At present, the domestic and foreign cotton stalk plucking, planning, digging, shoveling, and cutting, have reached a high theoretical and technological level, but are not applicable to the current planting mode of cotton stalk plucking production needs. The use of pinch roller-type in institutions means that soil plucking is not completed to ensure a low plucking breakage rate and a low leakage plucking rate during harvesting, but instead is used to completely harvest cotton stalks, in order to maximize the use of biological resources in the later stage. In this paper, we mainly study the influence of different pulling mechanisms on the performance of cotton stalk pulling, under the condition of long time operation, and the mechanical property failure caused by heat generation that exists in the pinch roller pulling parts. Subsequent research should also be carried out for the material characteristics of the pulling parts.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, W.; Xie, J.; Wang, Z.; Gao, Q.; Chen, M. Investigation of mechanical properties of cotton stalk based on multi-component analyses. Int. Agrophys. 2022, 31, 7–11. [Google Scholar] [CrossRef]
- Pan, Z. Research on Cotton Stalk Harvester Based on Double Roller Type. Adv. Mater. Res. 2014, 945–949, 286–289. [Google Scholar] [CrossRef]
- Baker, K.D.; Hughs, E.; Foulk, J.A. Cotton Quality as Affected by Changes in Spindle Speed. Appl. Eng. Agric. 2010, 26, 363–369. [Google Scholar] [CrossRef]
- Han, L.; Francis, K.; Mao, H.; Hu, J. Design and Tests of a Multi-pin Flexible Seedling Pick-up Gripper for Automatic. Appl. Eng. Agric. 2019, 6, 949–957. [Google Scholar] [CrossRef]
- Ghahraei, O.; Ahmad, D.; Khalina, A.; Suryanto, H.; Othman, J. Cutting Tests of Kenaf Stems. Trans. ASABE 2011, 54, 51–56. [Google Scholar] [CrossRef]
- Gupta, R.; Singh, S.; Sharda, V. Study on mechanical properties of cotton stalks in relation to plant pulling machinery. J. Res. 2007, 44, 66–69. [Google Scholar]
- Kumar, V.J.F.; Parvathi, S. Ergonomics of rural women for selected dry farming operations. Madras Agric. J. 2022, 29, 43–50. [Google Scholar]
- Kirkpatrick, C.; Viollier, P. A polarity factor takes the lead in chromosome segregation. EMBO J. 2010, 29, 3035–3036. [Google Scholar] [CrossRef]
- Sarkari, M.; Minaee, S. Evaluation of a cotton stalk puller performance. Am.-Eurasian J. Sustain. Agricult. 2008, 2, 19–24. [Google Scholar]
- Kumar, C.; Prakash, K.; Reddy, S. Development of Cotton stalk harvesting machine for ex-situ application. Ecol. Environ. Conserv. 2022, 16, 154–165. [Google Scholar] [CrossRef]
- Dong, S.; Wang, F.; Qiu, Z. Design and experiment of self-propelled cotton stalk picking harvester. Ecology. Trans. Chin. Soc. Agric. Mach. 2010, 41, 99–102. [Google Scholar]
- Xie, J.; Wu, S.; Cao, S. Design and testing of clamping roller type cotton stalk extraction device. Trans. Chin. Soc. Agric. Mach. 2023, 54, 101–111. [Google Scholar]
- Xu, X.; Li, L.; Ren, B. Dynamic Characterization of Spatial Axis Cross-Angle Herringbone Planetary Gear System. J. Mech. Eng. 2023, 59, 141–150. [Google Scholar]
- Cai, J.; Zhang, J.; Ye, T. Design and testing of a gripper belt type cotton stalk harvester. Trans. Chin. Soc. Agric. Eng. 2020, 51, 86–98. [Google Scholar]
- Hou, J.; Li, C.; Lou, W. Design and Test of Floating Clamping Device forGarlic Combine Harvester. Trans. Chin. Soc. Agric. Mach. 2023, 54, 137–145. [Google Scholar]
- Zhang, G.; Li, Y.; Li, Z. Measuring system of cotton stalk real-time pull force in the field based on LabVIEW. In Proceedings of the ASABE 2014 Annual International Meeting, Montreal, QC, Canada, 13–16 July 2014; p. 141912493. [Google Scholar] [CrossRef]
- Chen, X.; Li, Y.; Li, Z. Parameter Calibration of Discrete Element Model for Cotton Rootstalk–Soil Mixture at Harvest Stage in Xinjiang Cotton Field. Agriculture 2023, 13, 1344. [Google Scholar] [CrossRef]
- Zhang, B.; Liang, R.; Li, Z. Test and Analysis on Friction Characteristics of Major Cotton Stalk Cultivars in Xinjiang. Agriculture 2022, 12, 906. [Google Scholar] [CrossRef]
- Zhang, J.; Rui, Z.; Cai, J. Design and testing of a front-mounted belt clamping and conveying cotton stalk puller. Trans. Chin. Soc. Agric. Mach. 2021, 52, 77–152. [Google Scholar]
- Dong, X.; Zhang, Z. Soil properties, root morphology and physiological responses to cotton stalk biochar addition in two continuous cropping cotton field soils from Xinjiang, China. PeerJ 2022, 10, e12928. [Google Scholar] [CrossRef]
- Li, Y.; Cheng, C.; Xu, L. Design and experiment of baler for 4L-4.0 combine harvester of rice and wheat. Trans. Chin. CSAE 2021, 32, 29–35. [Google Scholar]
- Zhang, J.; Gao, Z.; Cai, J. Design and test of transverse-axis counter-roller type cotton stalk pulling device. Trans. Chin. Soc. Agric. Eng. 2021, 37, 43–52. [Google Scholar]
- Tang, Z.; Han, Z.; Gan, B. Design and testing of a harvesting stand for cotton straw pulling in the wrong row. Trans. Chin. Soc. Agric. Mach. 2010, 41, 80–85. [Google Scholar]
- Zhang, B.; Chen, X. Cotton stalk restitution coefficient determination tests based on the binocular high-speed camera technology. Int. J. Agric. Biol. Eng. 2022, 28, 75–92. [Google Scholar] [CrossRef]
- GB/T 5262-2008; General Provisions on Methods for Determining Test Conditions for Agricultural Machinery. Standardization Administration of China: Beijing, China, 2008.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pinch Roller-Type Stalk Pulling Mechanism Type | Leakage Rate for Each Test Point | Average Leakage Rate (%) (Standard Deviation Mean) | |||||
|---|---|---|---|---|---|---|---|
| Detection Point 1 (%) | Detection Point 2 (%) | Detection Point 3 (%) | Detection Point 4 (%) | Detection Point 5 (%) | |||
| wrapping-type X1 | 1 | 7.53 | 7.93 | 8.98 | 8.74 | 7.83 | 8.32 (0.83) |
| 2 | 9.06 | 7.76 | 10.77 | 8.19 | 7.35 | ||
| 3 | 8.00 | 8.35 | 7.45 | 8.56 | 8.19 | ||
| clamping-type X2 | 4 | 3.10 | 5.42 | 5.29 | 5.46 | 5.13 | 5.18 (0.59) |
| 5 | 5.41 | 5.11 | 5.21 | 5.19 | 5.07 | ||
| 6 | 5.40 | 5.64 | 5.29 | 5.82 | 5.15 | ||
| cross roller X3 | 7 | 3.74 | 4.72 | 4.86 | 4.27 | 4.38 | 4.55 (0.43) |
| 8 | 4.95 | 4.75 | 4.70 | 4.82 | 4.64 | ||
| 9 | 5.10 | 5.17 | 4.27 | 3.93 | 3.89 | ||
| Pinch Roller-Type Stalk Pulling Mechanism Type | Breakage Rate at Each Test Point | Average Breakage Rate (%) (Standard Deviation Mean) | |||||
|---|---|---|---|---|---|---|---|
| Detection Point 1 (%) | Detection Point 2 (%) | Detection Point 3 (%) | Detection Point 4 (%) | Detection Point 5 (%) | |||
| wrapping-type X1 | 1 | 12.90 | 11.08 | 9.93 | 8.51 | 7.85 | 9.56 (1.48) |
| 2 | 7.24 | 7.55 | 8.91 | 9.53 | 10.76 | ||
| 3 | 10.79 | 10.80 | 9.58 | 8.87 | 9.06 | ||
| clamping-type X2 | 4 | 14.72 | 15.98 | 17.84 | 17.23 | 15.68 | 14.10 (1.79) |
| 5 | 12.68 | 12.31 | 13.69 | 13.70 | 12.28 | ||
| 6 | 12.16 | 12.46 | 12.56 | 14.26 | 13.92 | ||
| cross roller X3 | 7 | 6.37 | 8.04 | 7.85 | 7.15 | 6.98 | 7.55 (0.49) |
| 8 | 7.79 | 8.13 | 7.37 | 7.73 | 8.01 | ||
| 9 | 8.26 | 7.55 | 7.11 | 7.55 | 7.27 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Zhang, J.; Shen, S.; Li, J.; Huo, Y.; Wang, Z. The Mechanical Analysis and Comparative Performance Test of the Roller-Type Pulling Mechanism for the Whole Cotton Stalk Pulling Machine. Agriculture 2024, 14, 506. https://doi.org/10.3390/agriculture14030506
Wang Y, Zhang J, Shen S, Li J, Huo Y, Wang Z. The Mechanical Analysis and Comparative Performance Test of the Roller-Type Pulling Mechanism for the Whole Cotton Stalk Pulling Machine. Agriculture. 2024; 14(3):506. https://doi.org/10.3390/agriculture14030506
Chicago/Turabian StyleWang, Yichao, Jiaxi Zhang, Shilong Shen, Jinming Li, Yanjun Huo, and Zhenwei Wang. 2024. "The Mechanical Analysis and Comparative Performance Test of the Roller-Type Pulling Mechanism for the Whole Cotton Stalk Pulling Machine" Agriculture 14, no. 3: 506. https://doi.org/10.3390/agriculture14030506
APA StyleWang, Y., Zhang, J., Shen, S., Li, J., Huo, Y., & Wang, Z. (2024). The Mechanical Analysis and Comparative Performance Test of the Roller-Type Pulling Mechanism for the Whole Cotton Stalk Pulling Machine. Agriculture, 14(3), 506. https://doi.org/10.3390/agriculture14030506