1. Introduction
Rice, as one of the major food crops of mankind, has edible, economic and medicinal value [
1,
2,
3]. Recently, with improvements to rice seed quality, the emergence rate and germination rate of rice seeds have been improved. Rice planting effectiveness is one of the main factors affecting rice yield. Compared with other planting methods, rice direct seeding technology is a light and simplified planting method that saves time and resources. It allows for precise seeding of rice seedlings with appropriate hole spacing, hole diameter and species count in accordance with agronomic requirements. This method represents one of the key directions of mechanized rice planting [
4,
5,
6].
The key component of mechanized rice direct seeding technology is the seed-metering device. Based on their operating principle, devices can be subdivided into pneumatic seed-metering devices and mechanical seed-metering devices. A pneumatic seed-metering device can adsorb or press seeds by using the characteristics of gas flow, which has the advantages of high precision and low seed damage. However, it is not suitable for seeding rice due to its complex structure, high sealing requirements, and the potential for suction hole blockages. A mechanical seed-metering device offers the benefits of a simple structure, easy inspection and maintenance, and the ability to accommodate high-humidity field seeding environments [
7].
In view of ensuring that mechanical seed-metering devices can complete seeding operations stably and accurately in the field, many researchers have conducted large amounts of in-depth research on mechanical seed-metering devices. Zhang et al. [
8] designed a slider–hole–wheel seed-metering device, studied the seed filling and removal process, analyzed the adverse effects of the rotation speed on seeding, and achieved high seeding accuracy. However, this study did not consider the potential damage caused by key components of the seed-metering device, such as the seed cleaning wheel, to the seeds. Maleki et al. [
9] designed a multi-layer spiral-groove seed-metering device to improve the seeding uniformity and achieve uniform seeding but did not take into account the required spacing for rice growth. To address the above problems, Hensh and Raheman [
10] designed a solenoid-operated hill-dropping seed-metering device, which utilizes a seed-metering wheel with an electromagnetic induction-type sensor for seed expulsion and achieves low-damage and orderly seed expulsion. However, this study failed to consider the hole-forming performance of the seed-metering device after seeding. In pursuit of precise seeding, Li et al. [
11] designed a combination of a mini shovel and a telescopic tube, which effectively solved the problems of seed tube blockage and uneven seeding depth and improved the qualified rate of the seed hole diameter after seeding. But the key components of the device vibrated when contacting the soil, which increases the degree of hole distance variation. Consequently, it is of great relevance to design a mechanical rice seed-metering device with no contact between the soil and the key components of device, a low seed breakage rate, and excellent hole-forming performance.
The effectiveness of the interaction between the key components of the seed-metering device and the sprouted seeds is the key to the successful completion of the seeding operation. Therefore, it is necessary to conduct simulation studies on the effects of seed–seed and seed–device component interactions. The discrete element method (DEM) has been employed to study various seed transport mechanisms within seed-metering devices, including the interaction between different particles inside the seed filling chamber [
12,
13,
14,
15]. By using the discrete element method, Pasha et al. [
16] simulated the motion of different seed particles in a seed packing machine, explored the effects of seed velocity and friction, and improved the uniformity of seed coating. With EDEM 2.7 software, Lei et al. [
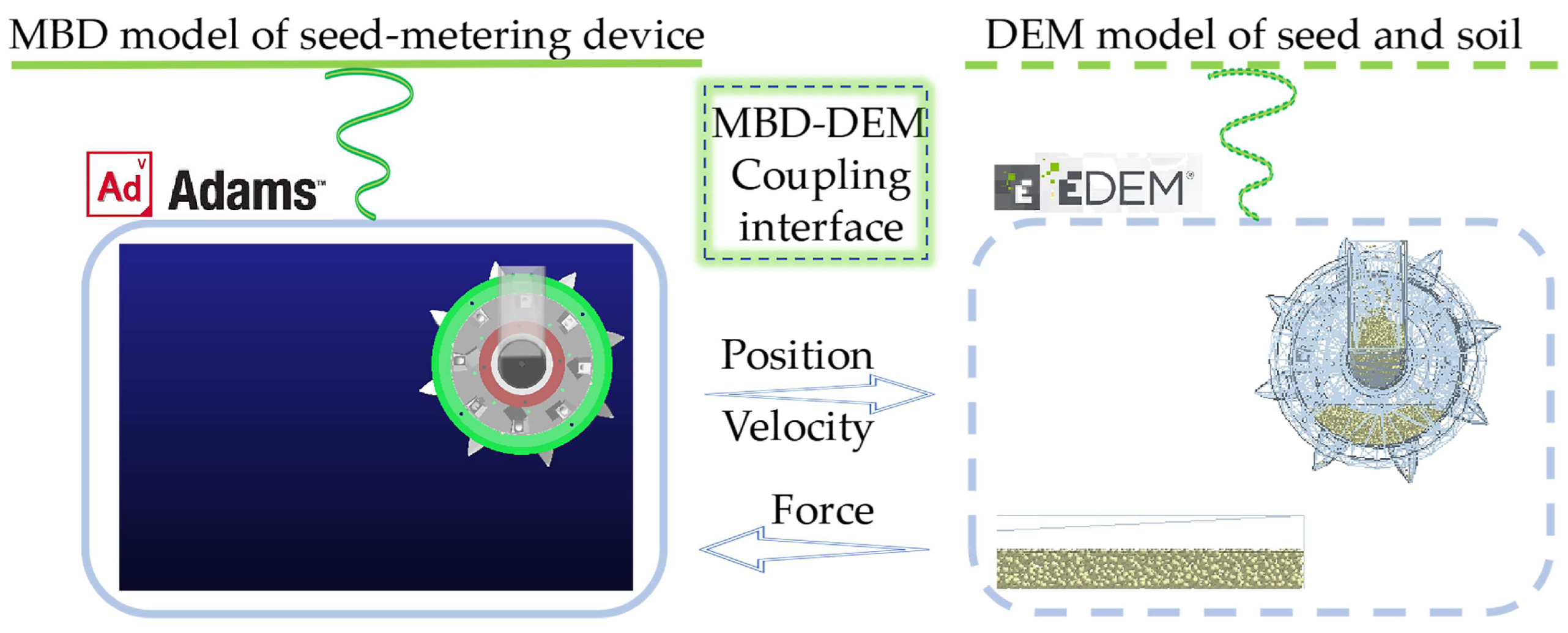
17] explored the seed flow characteristics in an air-assisted centralized metering system and analyzed the effect of the compression force on the filling characteristics. Simulating the motion of complex seed-metering device components using EDEM software alone can be challenging, while employing a combined simulation approach using the discrete element method (DEM) and multi-body dynamics (MBD) allows for modeling the effects of complex seed-metering device component motion on particles [
18,
19,
20]. This coupled simulation method has been applied in various agricultural engineering projects; for example: Kim et al. [
21] developed a full-scale soil–tool–machine coupled model based on DEM and MBD coupling to predict the traction force during tillage according to the tillage depth; Liu et al. [
22] developed a mathematical model and performed DEM and MBD coupled simulation to investigate the effects of feeding volume and threshing clearance on the load force of the piston rod of the hydraulic cylinder; Zhang et al. [
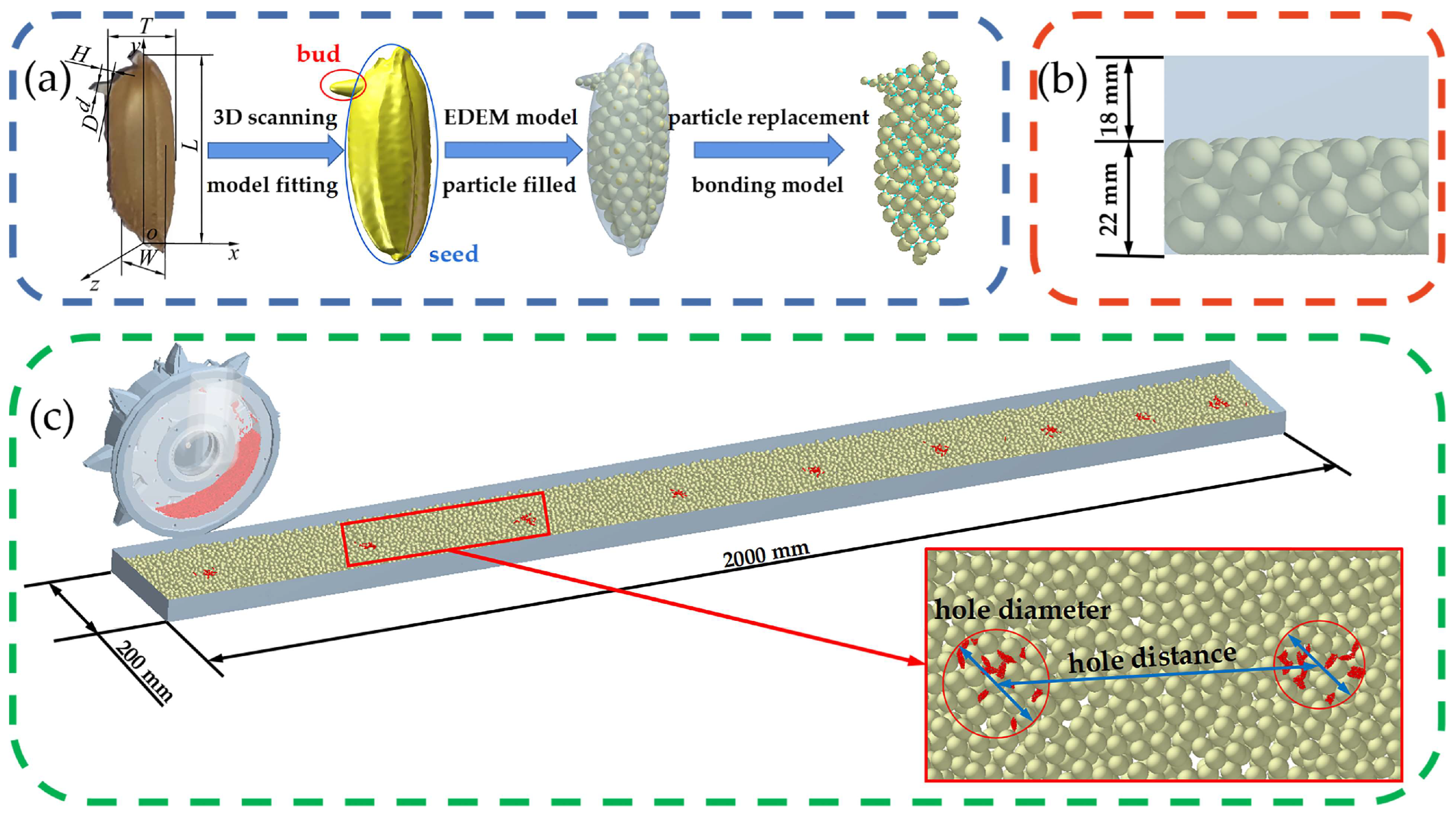
23] used MBD–DEM two-way coupling to analyze the harvesting process. Therefore, the coupled simulation method has been proven to be able to fully explain the interactions between the design components and the particles along with the particle motion. Before direct seeding in paddy fields, it is often necessary to prepare rice seeds by sunlight drying, sorting, soaking and germinating to shorten the rice growth period. These processes continue until seedlings with a length of 1–2 mm are obtained, after which they are ready for planting [
24,
25]. Previous studies have generally used an ellipsoidal model with multiple particles as a simplified model for rice seeds and did not address the effects produced by sprouting after seed soaking. Since the buds of the sprouting seeds are fragile, they can easily be damaged in the process of seeding, which reduces the seed emergence rate and prolongs the growth time of rice. Therefore, in this study, a bonding model was used to establish a rice seed and bud model and to determine the actual damage to the seeds under different bonding conditions. Although MBD–DEM coupled simulation has been applied to analyze the mechanisms of many devices in recent years, it has not yet been applied to research a mechanical sprouting rice seed seed-metering device.
High-speed camera technology can quickly create a record of a high-speed object’s trajectory, and it has the advantages of rapid image recording, clear images and real-time target capture [
26]. Zahra and Saman [
27] used the high-speed camera technique to record a falling seed’s trajectory. By extracting the trajectory equations, they determined the effective factors affecting the uniformity of seed hole distances under laboratory testing and field testing conditions. In order to improve the seeding performance in mountainous areas, Xing et al. [
28] designed a pneumatic rice seed-metering device with an adjustable seeding rate and used high-speed camera technology to research the seed throwing mechanism in order to establish the trajectory equation of the thrown seeds. By comparing the theoretical trajectory area with the actual one, the seeding performance of the seed-metering device was optimized. In the above studies, theoretical research and analysis of a segment of the trajectory during the seed throwing process was conducted solely using high-speed camera technology without further investigation into whether the post-landing motion of the seeds would impact the hole-forming performance. Furthermore, these studies did not take into account the additional interference of the seeding mechanism on the seeds, which can cause the actual trajectory of the seedlings to deviate from the theoretical trajectory, resulting in variations in seedling hole diameter and spacing and thus affecting the growth space and time required for the seedlings.
In response to the above issues, this study developed a side-filled rice precision hole direct seed-metering device and analyzed its operational mechanism. We employed MBD–DEM coupled simulation to assess the force and motion of seedlings within the planter, used high-speed camera technology to analyze factors affecting the seed-throwing trajectory, and conducted both single-factor and multi-factor bench tests to investigate the seeding performance of the seed-metering device.
3. Results and Discussion
3.1. Stress Analysis and Motion State of Seeds during Seeding Process
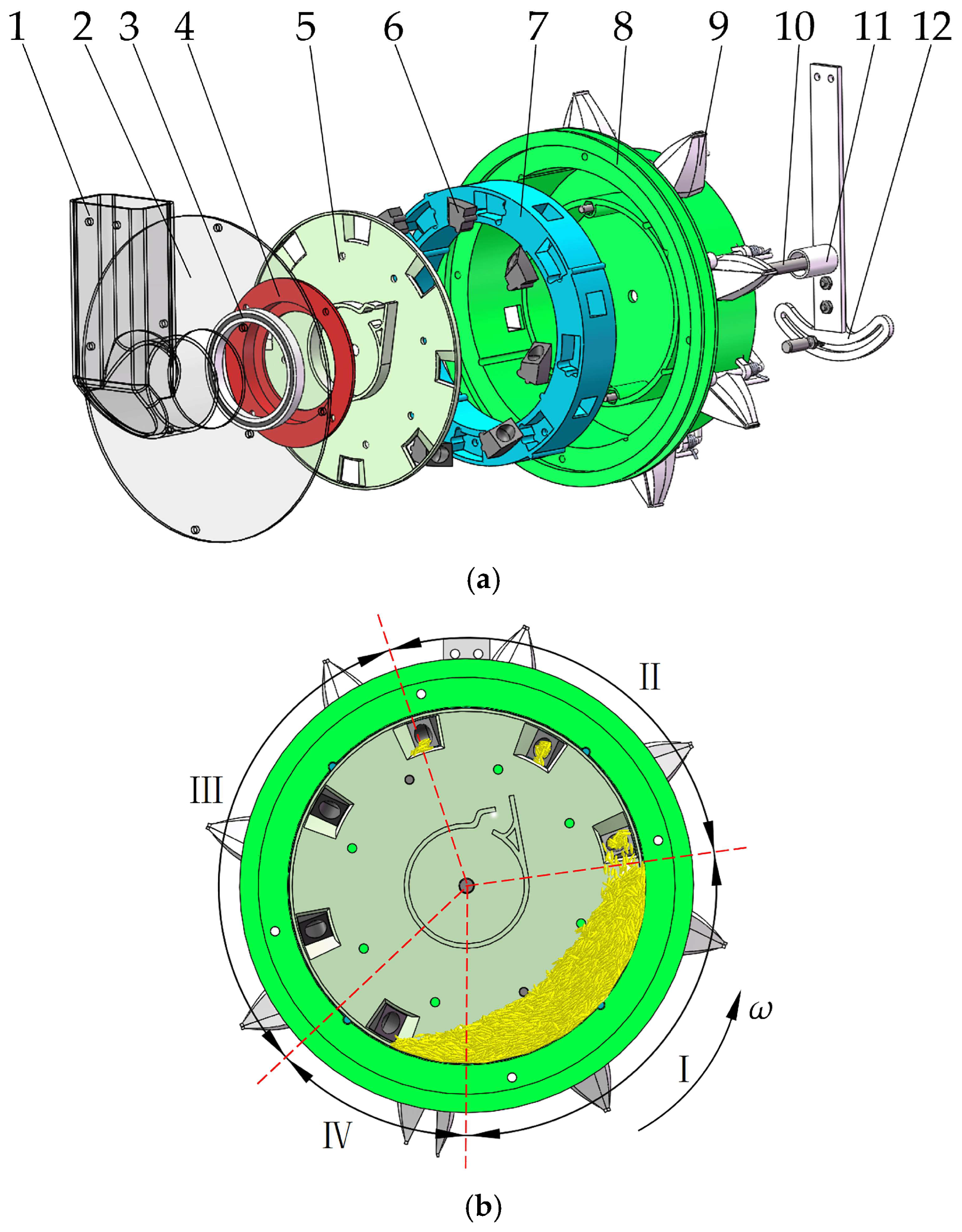
In this part, by simulating the seeding process under different rotation speeds, the bud seed flow states of the filling chamber and the effects of the key components on the bud seeds were investigated. The rotation speed of the seed-metering device was 30–70 r/min at five levels.
The coupled simulation process includes the rolling stage of bud seeds in the seed filling chamber and the seeding stage. In order to investigate the motion of and forces on the bud seeds in the seeding operation, after the movement of the device was stabilized, one of the bud seed holes that completed the seeding operation was selected and marked, and the combined force that the bud seed suffered during different stages of motion was extracted. As shown in
Figure 6, the red line is the trajectory of bud seed movement, and the yellow arrow represents the direction of bud seed flow. By observing the changes in the posture of the bud seed group, the seeding process was divided into different stages: I is the seed filling stage and has a seed angle of 90°; II is the seed cleaning stage and has a seed angle of 110°; III is the seed carrying stage and has a seed angle of 140°; IV is the seed throwing stage and has a seed angle of 20°.
As depicted in
Figure 6, during stages I, II, and III, it can be observed that the force exerted by other rice bud seeds and device components on the target rice bud seed group remained relatively uniform and below 0.06 N. This suggests the absence of any forced shear effects from the key components on the rice bud seeds, and there is no occurrence of seed damage caused by the internal components of the seed-metering device during its operation. At 4.2 s, the bud seed group passed through the throwing stage IV and successfully fell on the soil box with an impact force of 0.13 N. Through observation of the bud seeds falling stably on the soil box, there were no seed breakages, which indicated that the bud seeds can complete the seeding operation stably and safely.
The effect of seed-metering device with different rotation speeds on single bud seeds is shown in
Figure 7. As illustrated in
Figure 7a, it is evident that the forces acting on the rice bud seeds remain consistent at various speeds, indicating that the damage to the rice bud seeds caused by the key components of the seed-metering device was independent of the rotation speed. When the rotation speed was 70 r/min, the maximum force on the bud seeds was about 0.025 N, which is far less than the ultimate force of the bud seed impact. As illustrated in
Figure 7b, rotation speed had no significant effect on the velocity of bud seeds in the filling chamber but had a significant effect on the frequency of bud seed speed changes. This indicates that within the same time, with the increase in rotation speed, the force magnitude and direction change speed of bud seeds were intensified, which was more likely to cause wear and damage to bud seeds.
Among the various stages of the seeding process, the seed filling stage is the most critical period that significantly influences the seeding performance. During the seed filling stage, the force and speed of the rice bud seeds directly impacts the extent of seed damage and consequently affects the seed breakage index. Therefore, further studies and analyses of the seed filling stage are essential.
As shown in
Figure 8, the bud seeds in the bottom layer of the seed filling chamber moved inside the seed-metering device with rotation of the seed-metering device and flowed in the opposite direction to the bud seeds in the upper layer. The bud seeds in the upper layer flow faster, and the maximum speed reached 1.5 m/s. However, when the rotation speed was greater than 50 r/min, the speed of the bud seeds in the upper and lower layers did not increase with the increase in the rotation speed and started to maintain a limiting speed without large speed fluctuations.
The bud seeds that filled the seed filling compartment were the bottom layer bud seeds. A comparison between the speed of the bud seeds and the speed of the seed filling compartment revealed that the speed of the bottom layer bud seeds was less than the tangential movement speed of the seed-metering plate, resulting in a certain degree of relative sliding between the two. As a result, higher seed-metering plate rotational speed do not change the flow speed of the bud seeds. According to Equation (2), it is known that if the effective acceleration of the bud seeds remains unchanged, the seed filling effect of the seed filling component of the bud seeds per unit time does not change. By comparing the position of area B, it is clear that the rotation speed does not have a significant effect on the rotation angle in the seed filling stage.
By marking and tracking the bud seed groups in each hole, it can be seen that the range of area A where the seed filling component completes the filling of bud seeds is different at different rotation speeds. According to the comparison of the pictures in
Figure 8, it is known that with increasing the rotation speed, the bud seeds waiting to be filled are more and more dense, and the seed filling component can finish the filling operation within a smaller displacement. At 70 r/min, the device only requires 36° of rotation to complete the seed filling process, which only takes 0.086 s. During the seed filling process, the effect of key components and other buds on the buds waiting to be filled should be minimized. Higher rotation speeds allow for faster seed filling and reduced bud stress times but increase the force per unit of time that the seed filling component exerts on the bud seed groups. Relatively, a lower rotation speed will reduce the force of the seed filling component on the bud seeds per unit time but will increase the time of the force on the bud seeds. To examine the influence of seed-filling components and other bud seeds on the filled bud seeds, the EDEM post-processing function was utilized to extract the average force exerted on an individual bud seed during the seed-filling process. The seed-filling stage was subdivided into five sections, with the center of the seed-metering plate serving as the reference point, as illustrated in
Figure 9a.
From
Figure 9b, it is intuitively obvious that: when the filling parts are in areas I and II, the greater the rotation speed, the greater the resultant force received by the seed group. When the filling components were in areas III, IV and V, the smaller the rotation speed, the greater the combined force received by the seed group. However, the impact of the former on the bud seed group is significantly more pronounced than that of the latter. Therefore, it is evident that the rotation speed should be minimized while still ensuring effective seed filling by the device. When the rotation speed was 70 r/min and the filling area was I, the maximum force exerted on the seed group was about 0.004 N, which is lower than the limiting force of the seed, indicating that the seed-metering device will not directly damage the seed during the filling process.
3.2. Analysis of Throwing Trajectory and Seeding Performance
3.2.1. Analysis of Throwing Trajectory
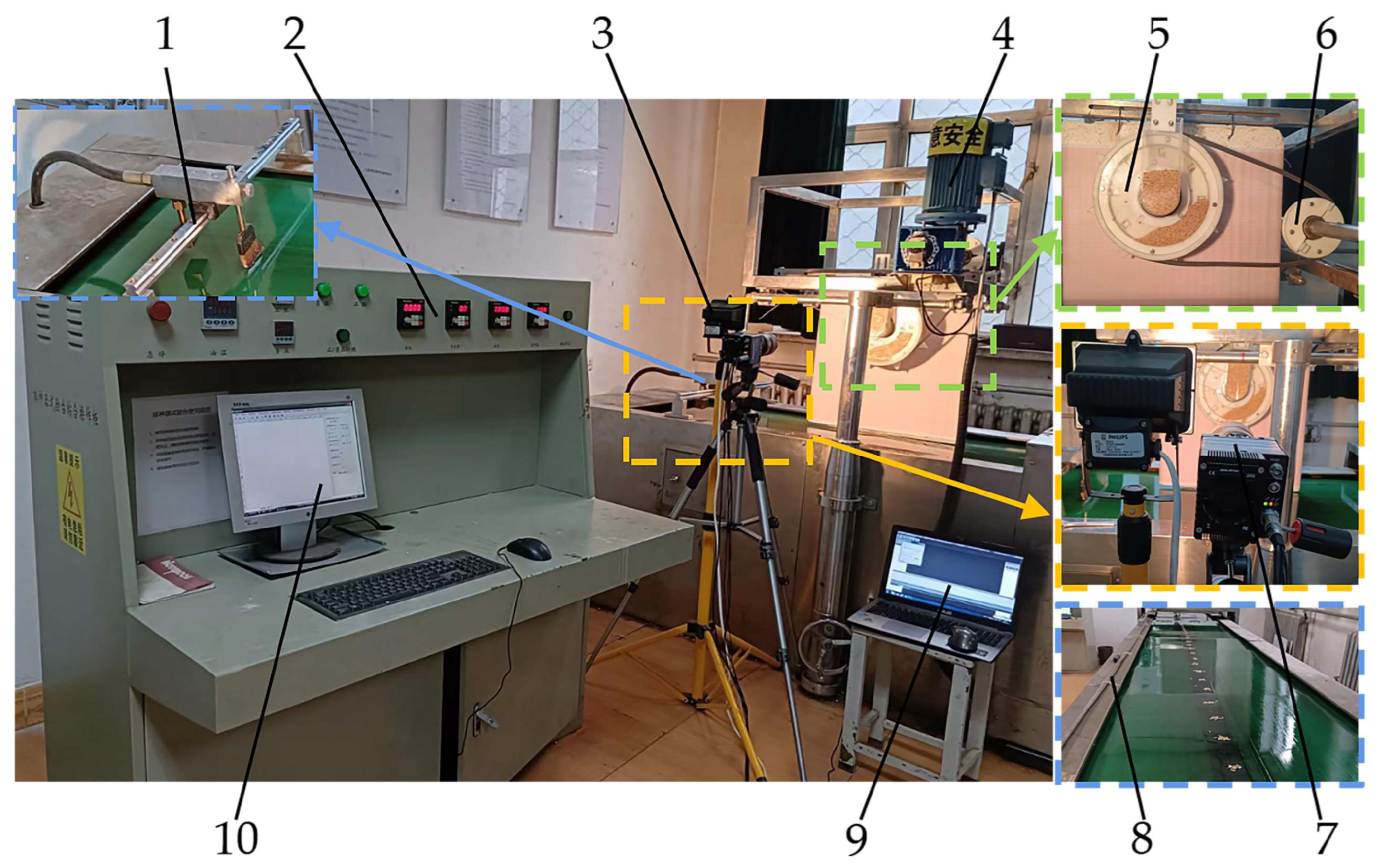
In order to further investigate the main factors that influence the hole-forming effect during the throwing process, high-speed camera technology was utilized to statistically analyze the seeding process, as shown in
Figure 10. The working parameters of the high-speed camera are set as throughput/photographic speed: the image resolution is 1600 × 1600; the instrument shoots at 500 fps.
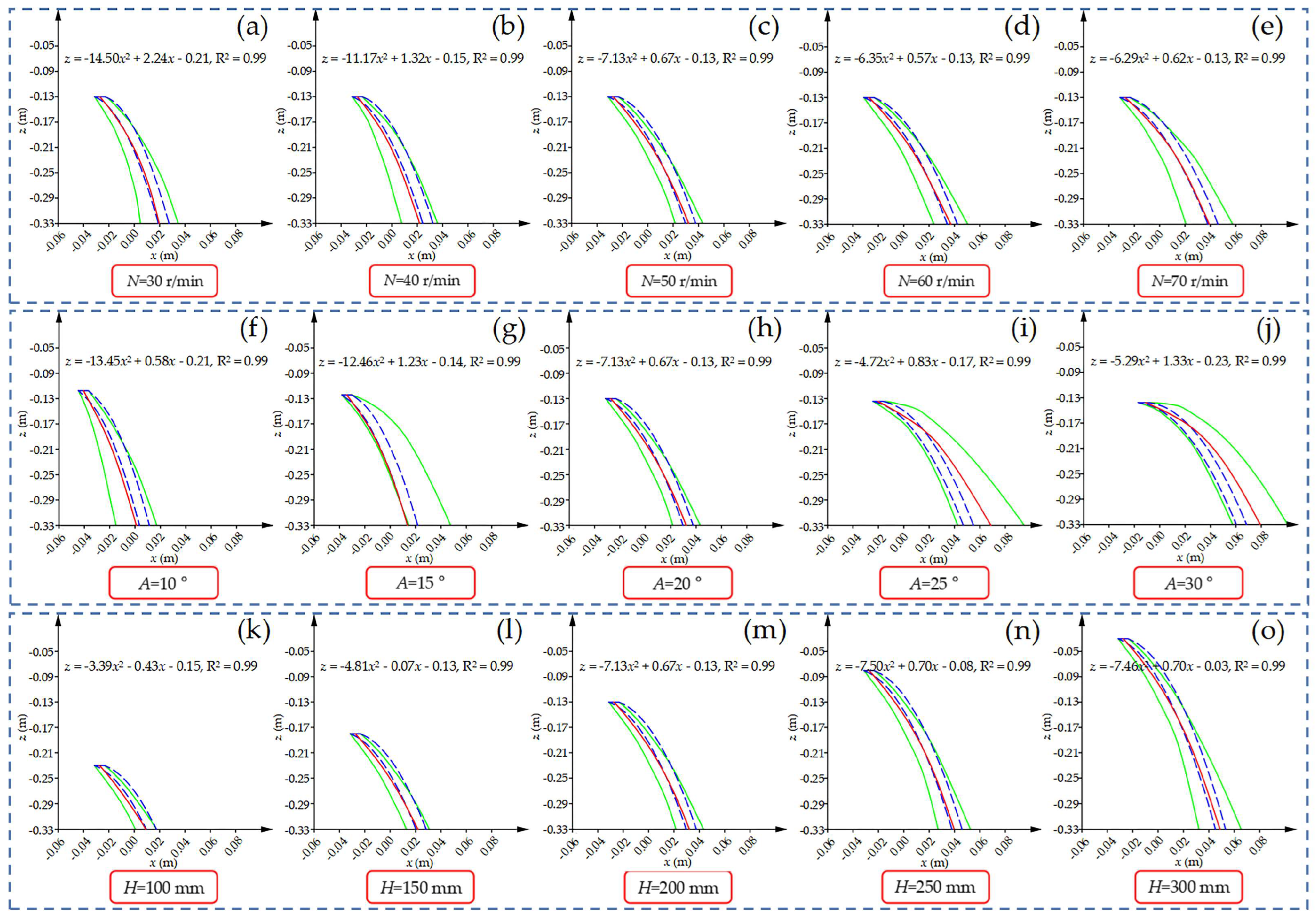
By continuously tracking the seeding trajectory through high-speed camera technology, we saw that different degrees of diffusion appeared in the falling process of bud seed groups. Under the influence of internal slippage, the effect of the duckbill unit on the bud seed group, and air resistance, the flat area of the bud seed group increased continuously, which adversely affected the changes to the hole diameter and hole distance after seeding. With the aim of investigating the causes of the unfavorable factors, it is necessary to analyze the trajectory of bud seed groups. Taking the center of the seed-metering plate as the reference coordinate point, the actual trajectory area of the falling bud seed group is counted, and the theoretical trajectory area of the bud seed group is obtained through a theoretical calculation. By processing and calculating the actual trajectory, the average curve and fitting equation of the actual trajectory are obtained. The final obtained drop trajectory of the bud seed groups is shown in
Figure 11.
It is clear from
Figure 11 that the rotation speed, seeding angle and seeding height of the seed-metering device all have great influence on the trajectory of the seed group.
The falling trajectories of the bud seed groups at different rotation speeds are shown in
Figure 11a–e. As the rotation speed increases, the actual trajectory areas of the bud seed groups show the trend of decreasing and then increasing. The main reason for this phenomenon is that when the rotation speed is low, the individual bud seeds in the bud seed group inside the duckbill unit and other bud seeds have a slip movement, resulting in a small change in the direction and size of the initial speed. As a result, individual rice bud seeds do not follow the theoretical trajectory during ejection. As the rotation speed increases, due to the increase in centrifugal force on the bud seeds, the bud seeds are pressed inside the duckbill unit, and the slip phenomenon is reduced. However, when the end bud seeds of the bud seed group were detached from the duckbill unit, the duckbill unit had already produced a small rotation, resulting in a change in the seeding angle of the end bud seeds and an increase in the area of the seeding trajectory. The diameters of the bud seed holes for five different rotation speeds are less than 50 mm, which meets the agronomic requirements for rice hole direct seeding.
The falling trajectories of bud seed groups under different seeding angles are shown in
Figure 11f–j. With the increase in the seeding angle, the actual trajectory areas of the bud seed groups exhibit a tendency of decreasing and then increasing. The main reason for this phenomenon is that: when the seeding angle is larger, the internal slip phenomenon of the bud seed group is serious, and the individual bud seeds do not move according to the theoretical seeding trajectory, resulting in an increase in the actual trajectory area. When the angle of seed casting is small, the angle between the movement direction of the bud seed group leaving the duckbill unit and the vertical direction is larger. The initial velocity of the seed group in the
z-axis direction decreases, the initial velocity in the
x-axis direction increases, and the throwing distance in the
x-axis direction increases, which ultimately leads to an increase in the actual trajectory area. Therefore, the seeding angle affects the actual trajectory more, and the actual trajectory mean line differs from the theoretical trajectory region. The diameters of the bud seed holes for five different seeding angles are less than 50 mm, which meets the agronomic requirements for rice hole direct seeding.
The falling trajectories of the bud seed groups at different seeding heights are shown in
Figure 11k–o. With the increase in seeding height, the actual trajectory area of bud seed group increased. In theory, a lower seeding height should result in better hole-forming performance. However, through observations of the seed distribution pattern on the belt of the seeding test bench and comparisons with high-speed camera photos, it was discovered that a lower seeding height can lead to secondary bouncing in the rice bud seed group. Specifically, the bud seeds that landed after seeding were prone to collide with those that had already landed first, resulting in bouncing. The bouncing phenomenon not only enlarged the diameter of the rice bud seed hole but also posed challenges for subsequent rice agronomic management. Therefore, the occurrence of bouncing should be minimized as much as possible, and an appropriate seeding height can effectively reduce the probability of occurrence.
3.2.2. Influence of Each Test Factor on Seeding
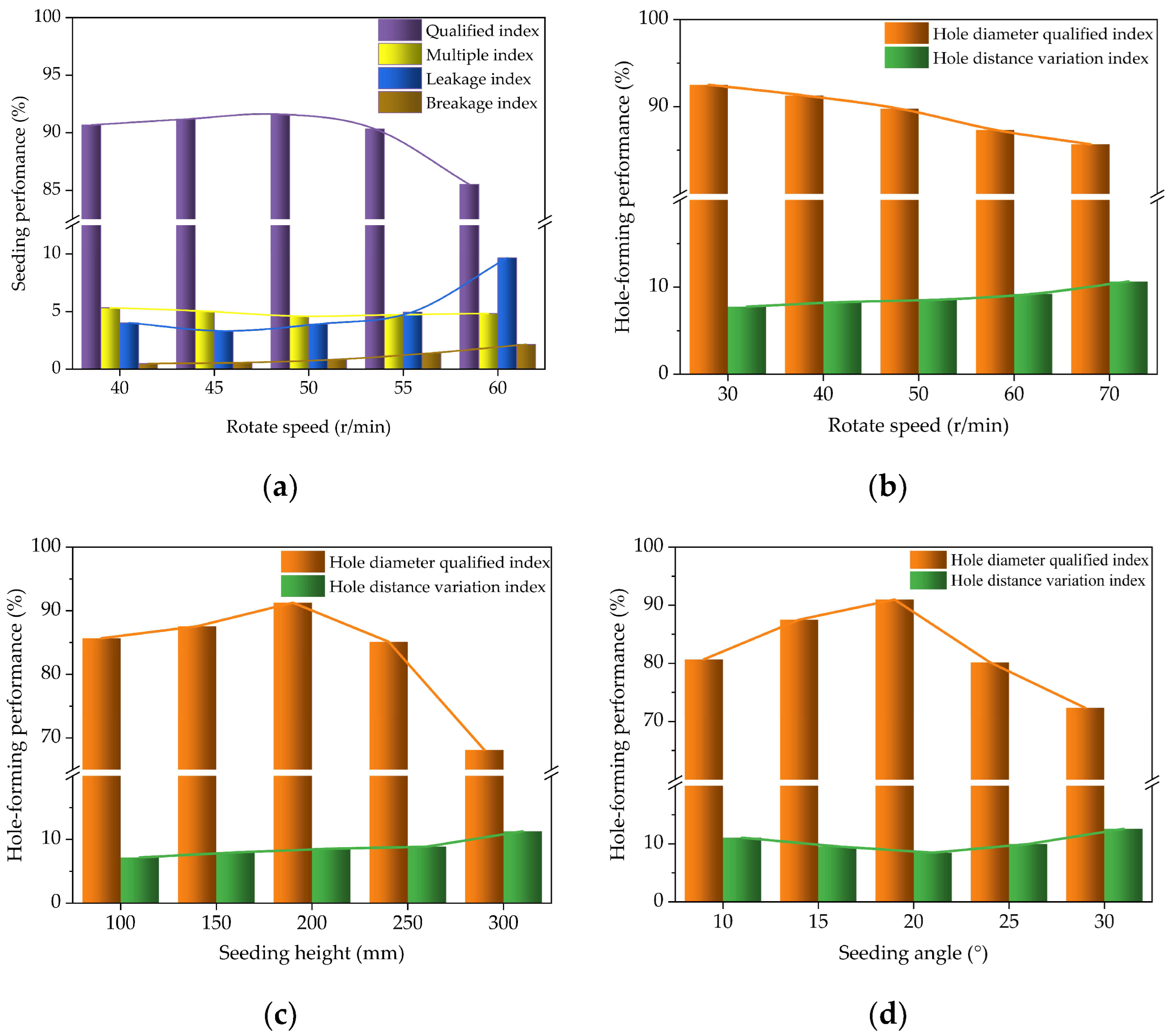
As shown in
Figure 12a, with the increase in rotation speed, the seeding qualified index shows a trend of stable increase and then decrease. When the rotation speed was 50 r/min, the seeding qualified index reached the maximum. With the increase in rotation speed, the multiple index gradually decreased, and the multiple index reached the maximum value when the rotation speed was 40 r/min. At this time, the rotation speed of the seed-metering device was low, the bud seeds outside the type hole in the seed cleaning area were subjected to poor seed cleaning, and the centrifugal force and the gravity of the bud seeds could not completely remove the excess bud seeds. With the increase in rotation speed, the leakage index showed a trend of first decreasing and then increasing. When the rotation speed was 70 r/min, the leakage index reached a maximum of 9.66%. Higher rotation speed affected the seed guiding effectiveness of the seed guide plate: part of the hole into the throwing area was not completely filled by the seed, resulting in a higher leakage index. With the increase in rotation speed, the bud seed breakage index gradually increased. The phenomenon of coat breakage on the surface of the bud seeds was aggravated, which affected the growth of the bud seeds. When the rotation speed was 40–60 r/min, the seeding quality was higher. The fitting equation for each index was obtained through the software as:
Figure 12b shows that the hole diameter qualified index decreases and the hole distance variation index increases with the increase in rotation speed. When the rotation speed was 70 r/min, the hole diameter qualified index was 85.67%, and the hole distance variation index was 10.64%. Under the premise of the same seeding angle and height, the initial speed of bud seeds leaving the device increased with the increase in rotation speed. Based on Equation (10), it can be seen that the effect of air resistance on the bud seed group increases, and the variability of the force on different bud seeds increases, resulting in a more complicated seeding process and worse hole-forming performance.
Figure 12c shows that with the increase in seeding height, the hole diameter qualified index shows a trend of slowly increasing and then rapidly decreasing, and the coefficient of variation of the hole diameters increases with the increase in height. When the seeding height was between 100–200 mm and the hole diameter was less than 22 mm, the bud seed was prone to bouncing when contacting the oil belt. This led to changes in the hole diameter of the bud seed: the hole diameter qualified index decreased, and the hole-forming performance became worse. Therefore, the qualified hole diameter should be 22–50 mm.
Figure 12d shows that with the increase in the seeding angle, the hole diameter qualified index showed a trend of increasing and then decreasing. When the seeding angle was 20°, the hole diameter qualified index reached the highest value of 90.97%. The hole distance variation index shows a trend of slowly decreasing and then slowly increasing and reached a minimum value of 8.46% when the seeding angle was 20°. This is attributed to variations in the seeding angle leading to differences in the initial velocity direction of the rice bud seed group. Simultaneously, the contact modes of the duckbill unit with different rice bud seeds have subtle variations that result in significant differences in hole-forming performance efficiency.
3.3. Seed Placement Performance Optimization Test Analysis
The multi-factor test scheme and results are shown in
Table 4.
To further explore the effects of different factors on the test parameters and explore interactions among multiple factors, multiple regression analysis was performed using Design-Expert 13. This allowed the establishment of a quadratic regression model relating the test parameters to the test factors and the subsequent significance of the test results, as illustrated in
Table 5.
As shown in
Table 5, the regression model results were extremely significant, the lack-of-fit test results were not significant, and the predicted R
2 values were all greater than 0.9, proving that the regression equations can accurately respond to the actual situation. For the hole diameter qualified index,
X1×2,
X1×3 and
X12 were not significant; for the hole distance variation index,
X1×2 and
X12 were not significant. After excluding non-significant factors, the quadratic regression equations of each test factor and test index were obtained using Design-Expert 13 software:
The variance results show that for the regression equation for the hole diameter qualified index, the influence of different factors on hole diameter qualified index is in the following order from high to low: rotation speed, seeding angle and seeding height. For the regression equation for the hole distance variation index, the influence of different factors on hole distance variation index is in the following order from high to low: seeding height, seeding angle and rotation speed.
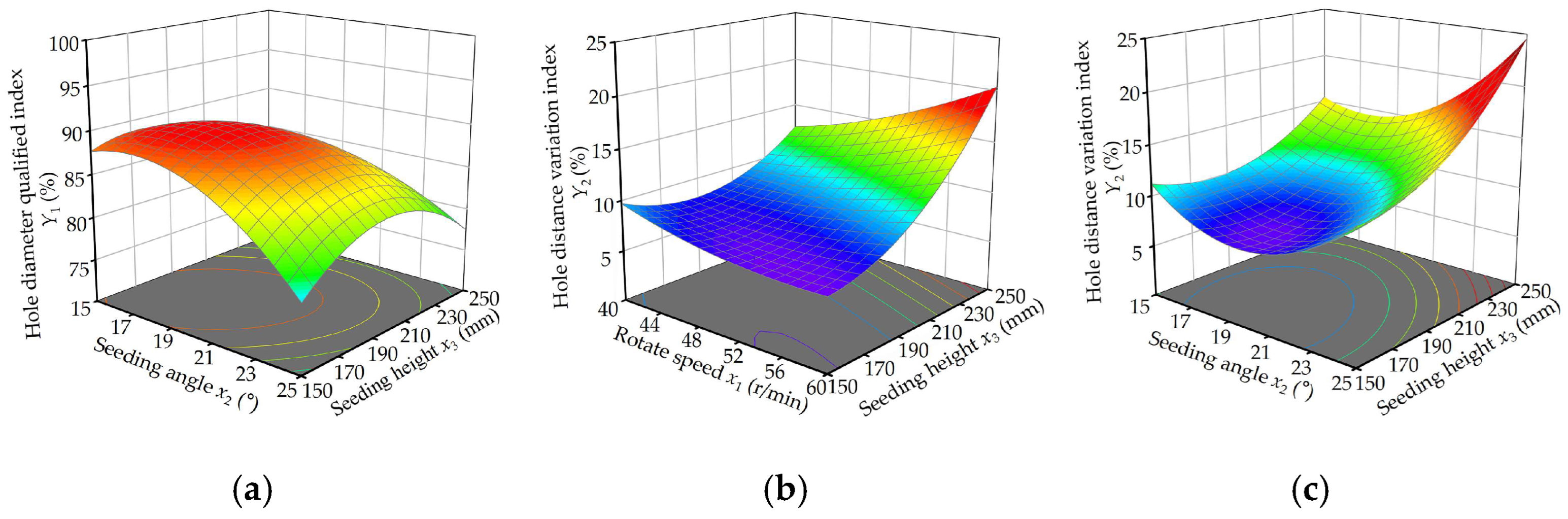
In order to observe more intuitively the impacts of the test factor interactions on the hole diameter qualified index and the hole distance variation index, response surface diagrams were drawn based on the significant terms of the interactions in
Table 5, as shown in
Figure 13.
The effect of
X2×3 interaction on the hole diameter qualified index is significant. According to
Figure 13a, when the rotation speed is constant, the hole diameter qualified index shows a trend of increasing and then decreasing. With the decrease in the seeding height, the diffusion effect of the bud seed groups in the process of falling decreases. In addition, as the seeding angle decreases, the initial velocity direction of the bud seed group is closer to the running direction of the conveyor belt, which is conducive to the realization of zero-speed seeding. Therefore, a reasonable reduction in these two variables can effectively improve the hole diameter qualified index of the seed-metering device. However, when the seeding angle was less than 16° and the seeding height was less than 160 mm, the bouncing phenomenon easily occurred, resulting in reduction in the hole diameter qualified index. As can be seen from the response surface diagram, when the seeding angle was 16–20° and the seeding height was 160–200 mm, the seeding qualified index stayed above 90%, which meets seeding requirements.
The effect of
X1×3 interaction on the hole distance variation index is particularly significant. According to
Figure 13b, the hole distance variation index decreased with the increase in the rotation speed and decreased with the decrease in the seeding height when the seeding angle was constant. When the seeding height was reduced, the effect of air resistance on the seed group was reduced, resulting in an increase in the uniformity of the distance from each individual bud seed to the center of the seed group when it fell on the conveyor belt and an increase in the uniformity of the distance between the centers of each of the two neighboring bud seed groups and thus a reduction in the hole distance variation index. As can be seen from the response surface diagram, when the rotation speed was 51–60 r/min and the seeding height was 150–170 mm, the hole distance variation index stayed below 8%, which meets the requirements of seeding.
The effect of
X2×3 interaction on the hole distance variation index is significant. According to
Figure 13c, when the rotation speed was constant, the hole distance variation index decreased and then increased with the increase in seeding angle and seeding height. As can be seen from the response surface diagram, when the seeding height was 150–190 mm and the seeding angle was 18–21°, the hole distance variation index was kept below 8%, which meets the seeding requirements.
For the purpose of accurately obtaining the optimal combination of test factors, a mathematical model was established with the boundary conditions of the test factors. With the objective of finally obtaining the highest seeding qualified index, the highest hole diameter qualified index and the lowest hole distance variation index, the optimization model was established as:
After optimization, the seed-metering device achieved its best performance parameters when the rotation speed was 47.030 r/min, the seeding angle was 18.592° and the seeding height was 178.67 mm: the seeding qualified index, hole diameter qualified index and hole distance variation index were 92.08%, 91.16% and 7.21%, respectively. The rotation speed of the seed-metering device was set to 47 r/min, the seeding angle was set to 19°, and the seeding height was set to 180 mm, and a bench test was carried out to verify the performance. The test was carried out five times, and the mean values of the seeding qualified index, the hole diameter qualified index and the hole distance variation index were 92.03%, 91.62% and 7.17%, respectively, and are basically in line with the optimization results.
4. Conclusions
In order to verify the performance of a side-filled rice precision hole direct seed-metering device, the seeding operation mechanism was analyzed, and the main factors affecting the seeding performance were identified: rotation speed, seeding angle and seeding height. The MBD-DEM coupling method was used to analyze the seeding process at different rotation speeds. A single-factor bench test was used to analyze the effects of different test factors on seeding performance. Three-factor and five-level quadratic regression orthogonal rotation center combination test methods were adopted to optimize and analyze the target parameters using the response surface method to obtain the optimal working parameter combination.
(1) The factors affecting the seeding performance and hole-forming performance of the side-filled rice precision hole direct seed-metering device are rotation speed, seeding height and seeding angle.
(2) The maximum value of the force on the bud seeds in each period is 0.025 N, and the maximum speed is less than 2 m/s. During the seed filling process, the maximum force on the bud seeds is about 0.008 N. The components of the side-filled rice precision hole direct seed-metering device do not have any damaging effect on the bud seeds.
(3) A high-speed camera test revealed that when the seed-metering device operates at a low rotation speed with an appropriate seeding angle, it can effectively mitigate the internal slipping of the rice bud seed group and reduce the throwing distance during the seed-throwing stage. Consequently, this diminishes the impact of the seed-throwing components on the seeding performance of the seed-metering device and ensure that the actual seeding trajectory of the rice bud seed group aligns with the theoretical seeding trajectory. Secondly, the appropriate seeding height can effectively avoid the occurrence of secondary bouncing and reduce its impact on the seeding performance of the seed-metering device.
(4) The optimal working parameters obtained from the multi-factor test were: a rotation speed of 47 r/min, seeding angle of 19° and seeding height of 180 mm, which led to a seeding qualified index of the seed-metering device of 92.03%, a hole diameter qualified index of 91.62% and a hole distance variation index of 7.17%.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}