Author Contributions
Conceptualization, J.J., L.H. and Y.Z.; methodology, J.J. and L.H.; software, G.C.; validation, J.J. and C.C.; formal analysis, J.J. and G.C.; investigation, J.J.; resources, C.C.; data curation, J.J.; writing—original draft preparation, J.J.; writing—review and editing, L.H. and Y.Z.; visualization, J.J. and G.C.; supervision, L.H. and Y.Z.; project administration, L.H. and Y.Z.; funding acquisition, L.H. and Y.Z. All authors have read and agreed to the published version of the manuscript.
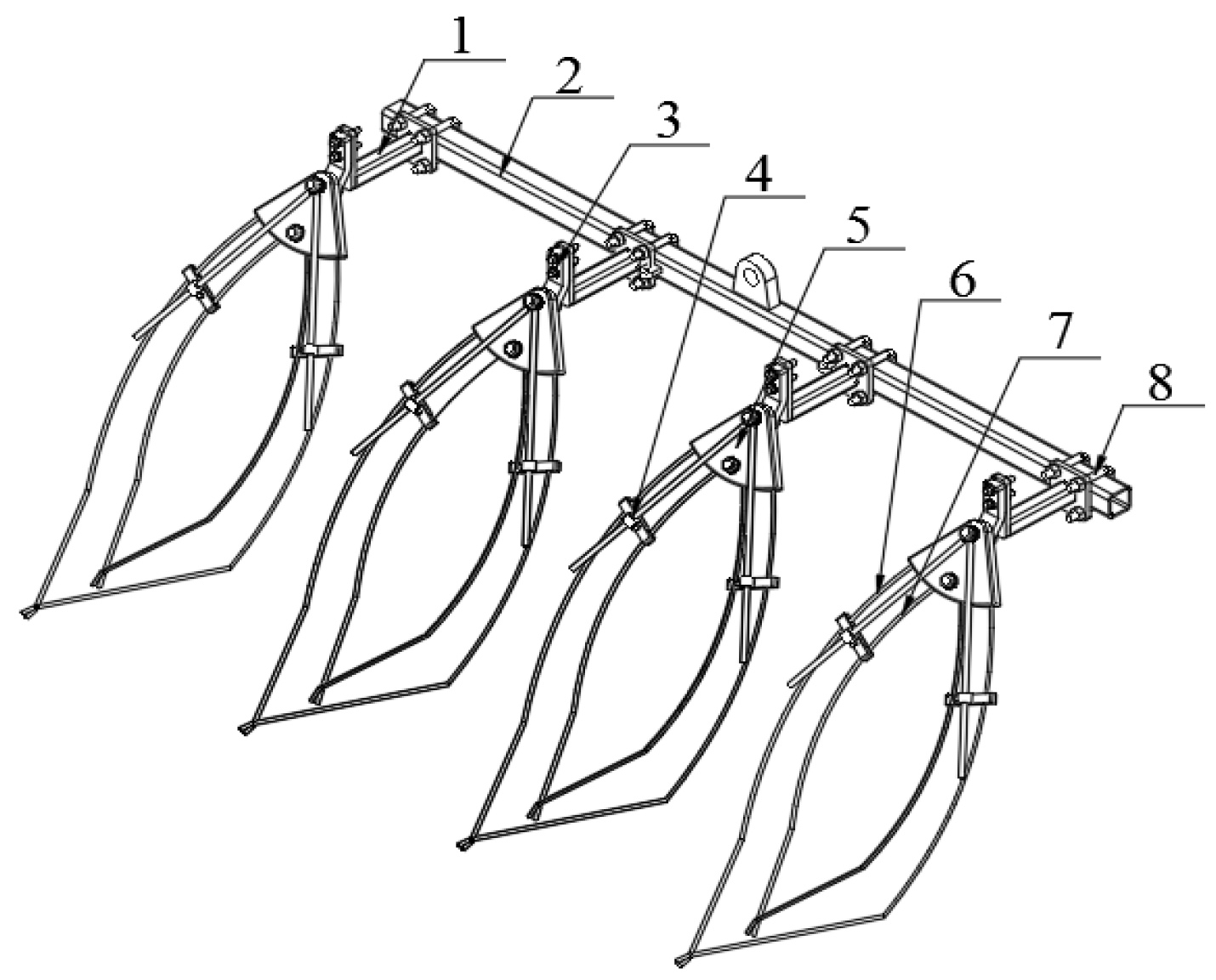
Figure 1.
Schematic diagram of the intra-row weeding device: (1) connecting frame; (2) frame; (3) installing frame; (4) elastic regulating mechanism; (5) fixing plate; (6) outer elastic rods; (7) inner elastic rods; (8) U-bolt.
Figure 1.
Schematic diagram of the intra-row weeding device: (1) connecting frame; (2) frame; (3) installing frame; (4) elastic regulating mechanism; (5) fixing plate; (6) outer elastic rods; (7) inner elastic rods; (8) U-bolt.
Figure 2.
Mechanical analysis of the weeding device to weeds or rice in vertical direction: (a) horizontal; (b) obliquely upward; (c) obliquely upward. O is the action point of the weeding device to weeds or rice. F′ is the force of the elastic rods to weeds or rice, N; F1′ and F2′ are the component forces of F′ in horizontal and vertical directions, N; β is the angle between F and the horizontal plane, deg; Ff is the force of the soil resistance, N; Fb is the maximum static resistance force of rice roots, N.
Figure 2.
Mechanical analysis of the weeding device to weeds or rice in vertical direction: (a) horizontal; (b) obliquely upward; (c) obliquely upward. O is the action point of the weeding device to weeds or rice. F′ is the force of the elastic rods to weeds or rice, N; F1′ and F2′ are the component forces of F′ in horizontal and vertical directions, N; β is the angle between F and the horizontal plane, deg; Ff is the force of the soil resistance, N; Fb is the maximum static resistance force of rice roots, N.
Figure 3.
Mechanical analysis of the weeding device acting on weeds and rice in a horizontal direction: (1) intra-row weeding device; (2) weeds; (3) rice; F1, F2 are the forces of the elastic rods acting on weeds or rice, N; F is the resultant force of F1 and F2, N; Fc, Fc1, and Fc2 are the forces of weeds acting on the elastic rods, N; Fs1 and Fs2 are the forces of rice acting on the elastic rods, N; Ff, Ff1 and Ff2 are the forces of the soil resistance, N.
Figure 3.
Mechanical analysis of the weeding device acting on weeds and rice in a horizontal direction: (1) intra-row weeding device; (2) weeds; (3) rice; F1, F2 are the forces of the elastic rods acting on weeds or rice, N; F is the resultant force of F1 and F2, N; Fc, Fc1, and Fc2 are the forces of weeds acting on the elastic rods, N; Fs1 and Fs2 are the forces of rice acting on the elastic rods, N; Ff, Ff1 and Ff2 are the forces of the soil resistance, N.
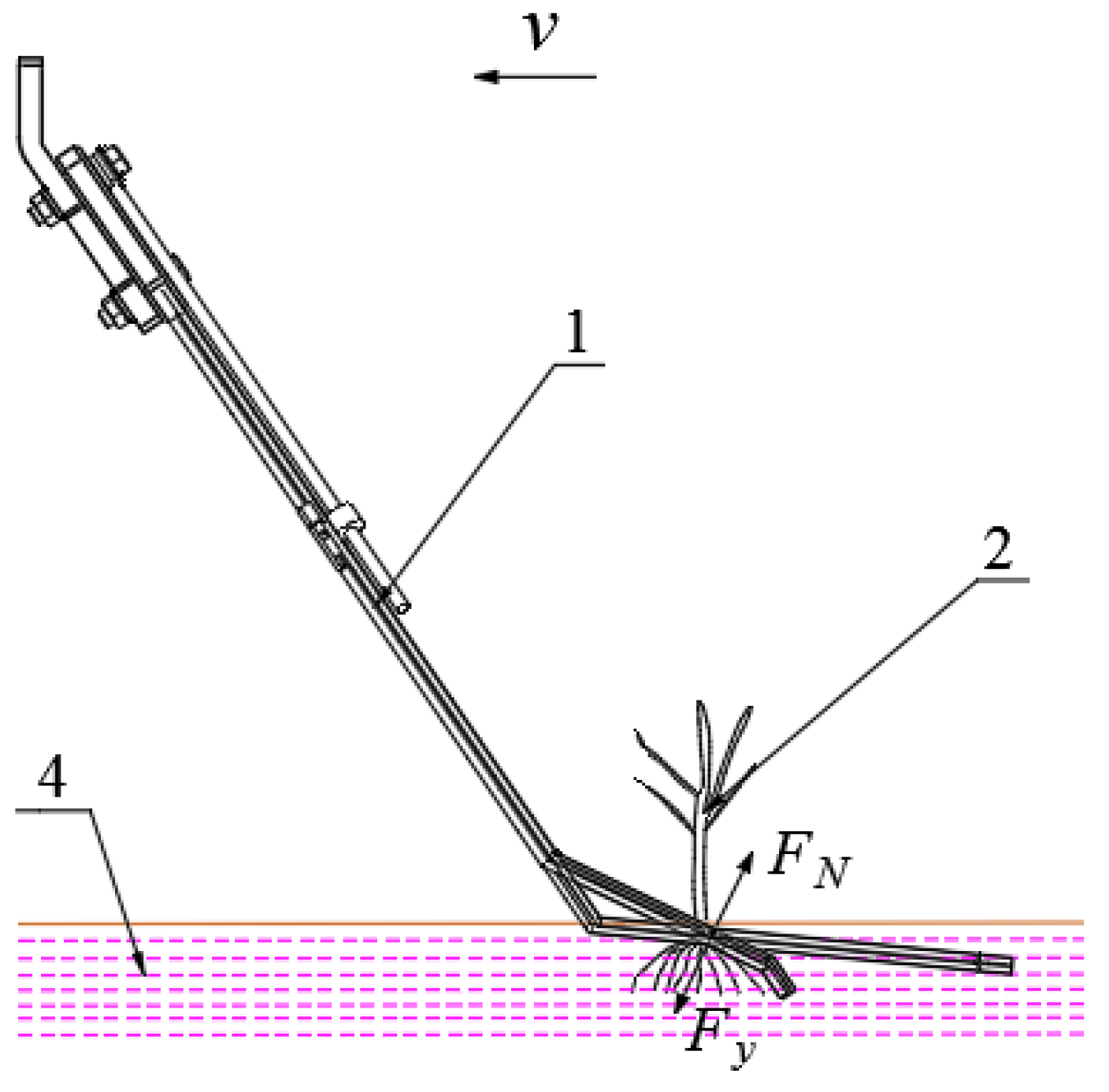
Figure 4.
Mechanical analysis of the weeding device to soil in vertical direction: (1) intra-row weeding device; (2) weed; (4) paddy soil; Fy is the pressure of the weeding device to soil, N; FN is the support force of soil to the weeding device, N.
Figure 4.
Mechanical analysis of the weeding device to soil in vertical direction: (1) intra-row weeding device; (2) weed; (4) paddy soil; Fy is the pressure of the weeding device to soil, N; FN is the support force of soil to the weeding device, N.
Figure 5.
Experiment for elastic force of the elastic rod.
Figure 5.
Experiment for elastic force of the elastic rod.
Figure 6.
Simulation experiment model of intra-row weeding device.
Figure 6.
Simulation experiment model of intra-row weeding device.
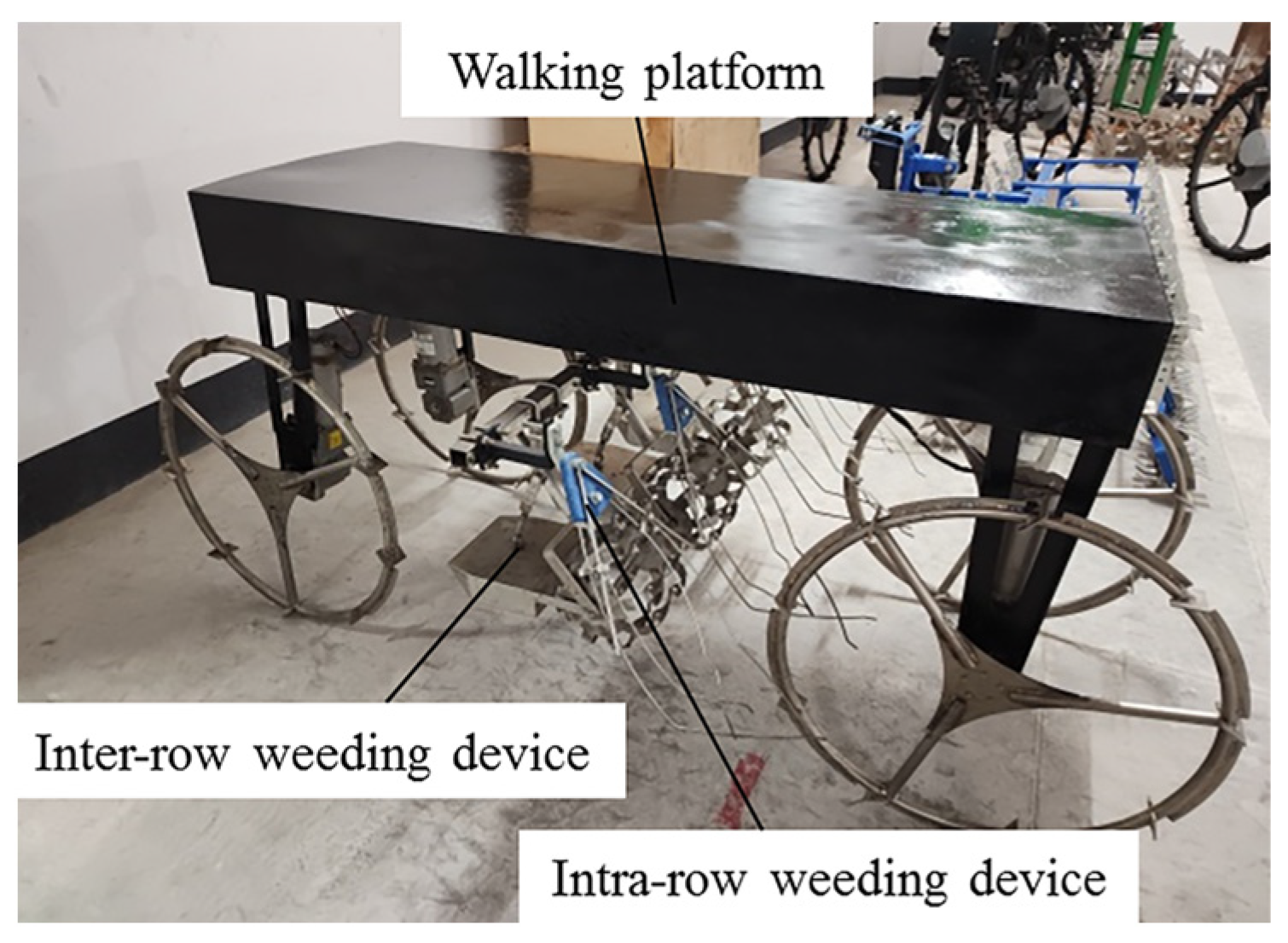
Figure 7.
Mechanical weeder for organic rice.
Figure 7.
Mechanical weeder for organic rice.
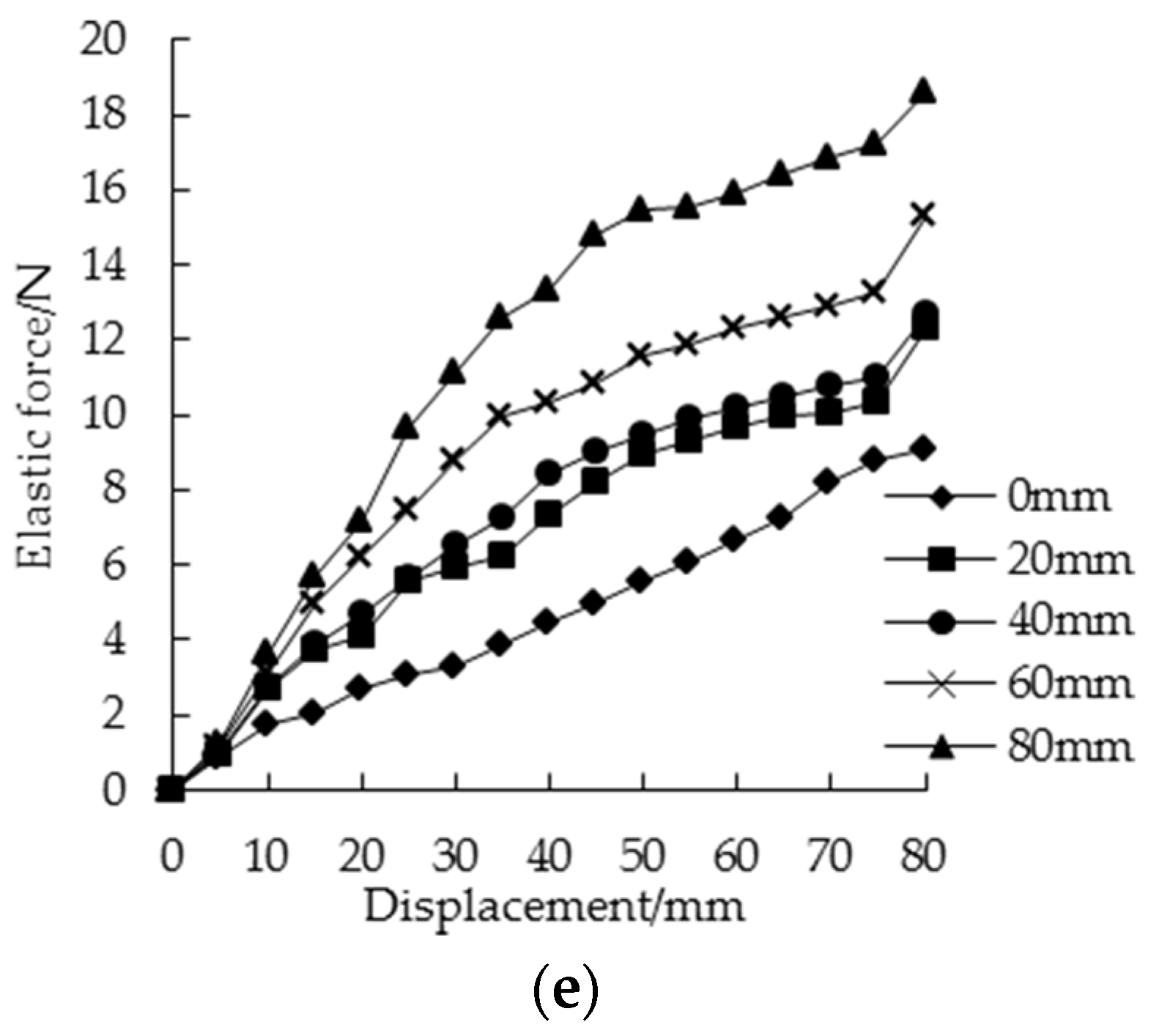
Figure 8.
Elastic forces of the elastic rods at the end in the horizontal direction: (a) the position of the regulating mechanism was 420 mm; (b) the position of the regulating mechanism was 370 mm; (c) the position of the regulating mechanism was 320 mm; (d) the position of the regulating mechanism was 270 mm; (e) the position of the regulating mechanism was 220 mm.
Figure 8.
Elastic forces of the elastic rods at the end in the horizontal direction: (a) the position of the regulating mechanism was 420 mm; (b) the position of the regulating mechanism was 370 mm; (c) the position of the regulating mechanism was 320 mm; (d) the position of the regulating mechanism was 270 mm; (e) the position of the regulating mechanism was 220 mm.
Figure 9.
Elastic forces of the elastic rod at the end in the vertical direction.
Figure 9.
Elastic forces of the elastic rod at the end in the vertical direction.
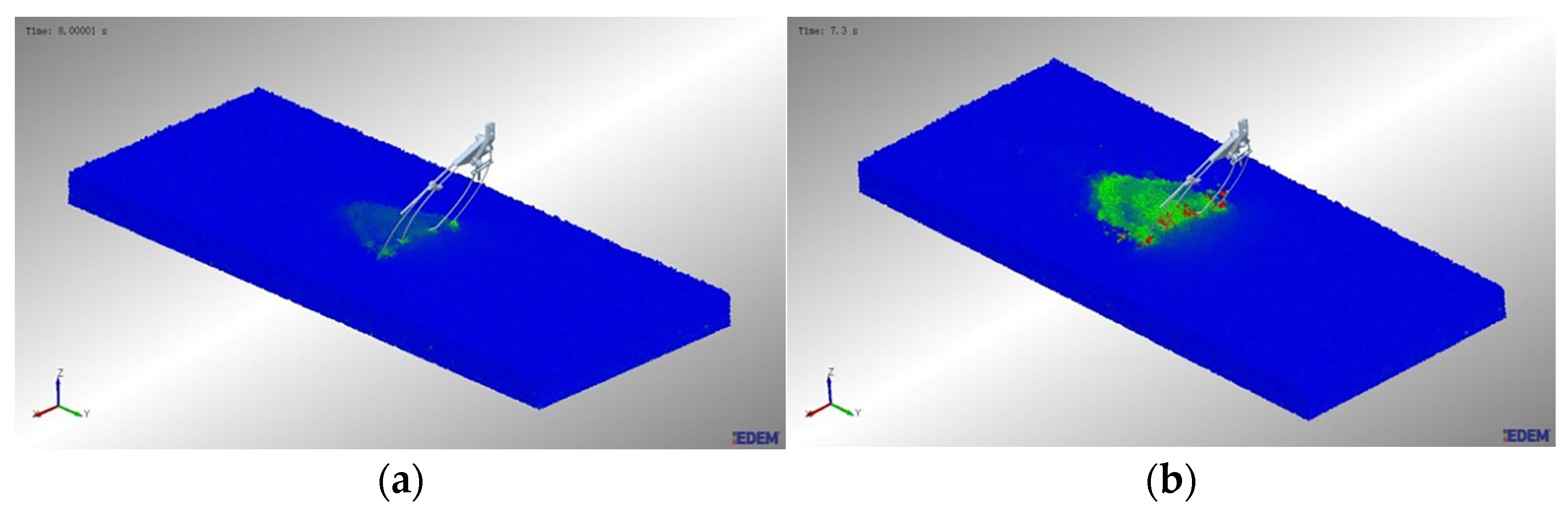
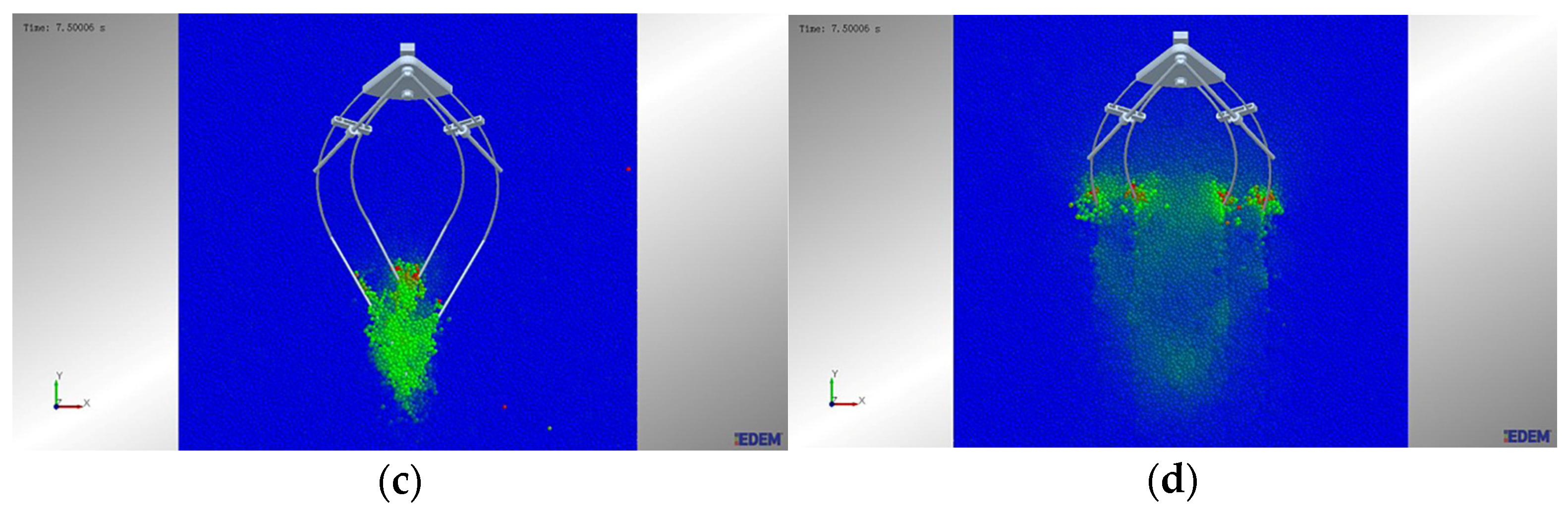
Figure 10.
Simulation effect of the intra-row weeding device: (a) the weeding speed was slower; (b) the weeding speed was faster; (c) the weeding depth was shallower; (d) the weeding depth was deeper.
Figure 10.
Simulation effect of the intra-row weeding device: (a) the weeding speed was slower; (b) the weeding speed was faster; (c) the weeding depth was shallower; (d) the weeding depth was deeper.
Figure 11.
Response surface diagrams: (a) amount of soil disturbance; (b) forward resistance of the inner elastic rod; (c) force in the vertical direction of the inner elastic rod; (d) forward resistance of the outer elasticthed; (e) force in the vertical direction of the outer elastic rod.
Figure 11.
Response surface diagrams: (a) amount of soil disturbance; (b) forward resistance of the inner elastic rod; (c) force in the vertical direction of the inner elastic rod; (d) forward resistance of the outer elasticthed; (e) force in the vertical direction of the outer elastic rod.
Figure 12.
Field operation of mechanical weeder for organic rice.
Figure 12.
Field operation of mechanical weeder for organic rice.
Figure 13.
Field operation of mechanical weeder in paddy field: (a) weaker rice; (b) stronger rice.
Figure 13.
Field operation of mechanical weeder in paddy field: (a) weaker rice; (b) stronger rice.
Table 1.
Mechanical properties of rice and weeds.
Table 1.
Mechanical properties of rice and weeds.
| Date | Plant | Plant Height/mm | Stem Diameter/mm | Roots Depth/mm | Bending Resistance Force/N | Pullout Force/N | Damaging Plant Force/N |
|---|
| 7 days after transplanting | Rice | 250 | 35 | 80 | 1.35 | 2.57 | 9.39 |
| Weeds | 109 | 1.83 | 30 | 0.86 | 1.24 | - |
| 15 days after transplanting | Rice | 400 | 40 | 100 | 5.45 | 9.70 | 14.87 |
| Weeds | 151 | 2.54 | 45 | 1.65 | 7.51 | - |
Table 2.
Parameters of experiment for the elastic force.
Table 2.
Parameters of experiment for the elastic force.
| Items | Parameters |
|---|
| Position of the regulating mechanism/mm | 220, 270, 320, 370, 420 |
| Measuring position/mm | 0, 20, 40, 60, 80 |
| Displacement/mm | 0–80 (Spacing of 5 mm) |
Table 3.
Parameters of soil model and material of the weeding device.
Table 3.
Parameters of soil model and material of the weeding device.
| Parameters | Values |
|---|
| Soil particle radius/mm | 3 |
| Soil density/(kg·m−3) | 1813.09 |
| Poisson’s ratio of soil | 0.35 |
| Shear modulus of soil/MPa | 1 |
| Soil surface energy | 1.2 |
| Soil-soil recovery coefficient | 0.01 |
| Soil-soil static friction coefficient | 0.11 |
| Soil-soil dynamic friction coefficient | 0.15 |
| Steel density/(kg·m−3) | 7865 |
| Poisson’s ratio of steel | 0.3 |
| Shear modulus of steel/MPa | 7.9 × 104 |
| Soil-steel recovery coefficient | 0.01 |
| Soil-steel static friction coefficient | 0.62 |
| Soil-steel dynamic friction coefficient | 0.13 |
Table 4.
Coding table of factors and levels.
Table 4.
Coding table of factors and levels.
| Codes | Weeding Depth X1/mm | Weeding Speed X2/(m·s−1) |
|---|
| 1.414 | 60 | 1.5 |
| 1 | 52.68 | 1.35 |
| 0 | 35 | 1 |
| −1 | 17.32 | 0.65 |
| −1.414 | 10 | 0.5 |
Table 5.
Experimental scheme and results: x1 is the coded value corresponding to the weeding depth X1; x2 is the coded value corresponding to the weeding speed X2; Y1 is the amount of soil disturbance; Y2 is the forward resistance of the inner elastic rod; Y3 is the force in the vertical direction of the inner elastic rod; Y4 is the forward resistance of the outer elastic rod; Y5 is the force in the vertical direction of the outer elastic rod.
Table 5.
Experimental scheme and results: x1 is the coded value corresponding to the weeding depth X1; x2 is the coded value corresponding to the weeding speed X2; Y1 is the amount of soil disturbance; Y2 is the forward resistance of the inner elastic rod; Y3 is the force in the vertical direction of the inner elastic rod; Y4 is the forward resistance of the outer elastic rod; Y5 is the force in the vertical direction of the outer elastic rod.
| Serial Number | x1 | x2 | Y1/(×103 mm2) | Y2/N | Y3/N | Y4/N | Y5/N |
|---|
| 1 | 1 | 1 | 10.75 | 14.17 | 10.40 | 16.53 | 6.74 |
| 2 | 1 | −1 | 5.13 | 10.70 | 7.67 | 13.95 | 4.51 |
| 3 | −1 | 1 | 5.47 | 5.04 | 3.64 | 5.89 | 3.17 |
| 4 | −1 | −1 | 4.05 | 3.71 | 2.76 | 4.75 | 2.19 |
| 5 | 1.414 | 0 | 8.15 | 14.25 | 10.89 | 19.40 | 7.07 |
| 6 | −1.414 | 0 | 1.81 | 2.43 | 1.86 | 2.36 | 1.66 |
| 7 | 0 | 1.414 | 6.8 | 10.26 | 8.01 | 12.64 | 5.43 |
| 8 | 0 | −1.414 | 3.04 | 5.96 | 4.82 | 9.07 | 2.95 |
| 9 | 0 | 0 | 7.75 | 7.53 | 5.86 | 10.06 | 3.84 |
| 10 | 0 | 0 | 7.88 | 7.53 | 5.93 | 10.06 | 3.77 |
| 11 | 0 | 0 | 6.51 | 7.96 | 6.64 | 11.15 | 4.43 |
| 12 | 0 | 0 | 6.21 | 7.41 | 6.31 | 11.38 | 3.11 |
| 13 | 0 | 0 | 6.71 | 6.89 | 6.04 | 11.97 | 4.94 |
| 14 | 0 | 0 | 6.19 | 8.38 | 7.89 | 10.72 | 4.54 |
| 15 | 0 | 0 | 5.79 | 8.40 | 7.09 | 10.07 | 3.25 |
| 16 | 0 | 0 | 6.3 | 8.94 | 7.18 | 11.52 | 3.84 |
Table 6.
Results of ANOVA, significance, and mismatch tests of each experimental index: ** indicates extremely significant level (p < 0.01); * indicates significant level (p < 0.05).
Table 6.
Results of ANOVA, significance, and mismatch tests of each experimental index: ** indicates extremely significant level (p < 0.01); * indicates significant level (p < 0.05).
| Experimental Indexes | Variance Analysis (F Values) | Multiple Correlation Indexes |
|---|
| Regression Models | x1 | x2 | Testing Lose Effectiveness of Fit |
|---|
| Y1 | 15.83 ** | 26.39 ** | 17.14 ** | 3.24 | 0.75 |
| Y2 | 182.41 ** | 328.8 ** | 36.03 * | 0.85 | 0.96 |
| Y3 | 100.01 ** | 180.1 ** | 19.92 ** | 0.57 | 0.93 |
| Y4 | 204.15 ** | 392.62 ** | 15.68 ** | 1.19 | 0.96 |
| Y5 | 47.74 ** | 76.6 ** | 18.88 ** | 0.46 | 0.86 |
Table 7.
Weeding and damaging seedling rates at different positions of regulating mechanism.
Table 7.
Weeding and damaging seedling rates at different positions of regulating mechanism.
| Positions of the Regulating Mechanism | Weeding Rates/% | Rates of Damaging Seedling/% |
|---|
| 420 mm | 53.99 | 0.45 |
| 370 mm | 64.03 | 1.49 |
| 320 mm | 69.47 | 3.08 |
| 270 mm | 80.65 | 3.36 |
| 220 mm | 79 | 5.36 |


 ,
, 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}