
Development of a Control System for Double-Pendulum Active Spray Boom Suspension Based on PSO and Fuzzy PID

Abstract
:1. Introduction
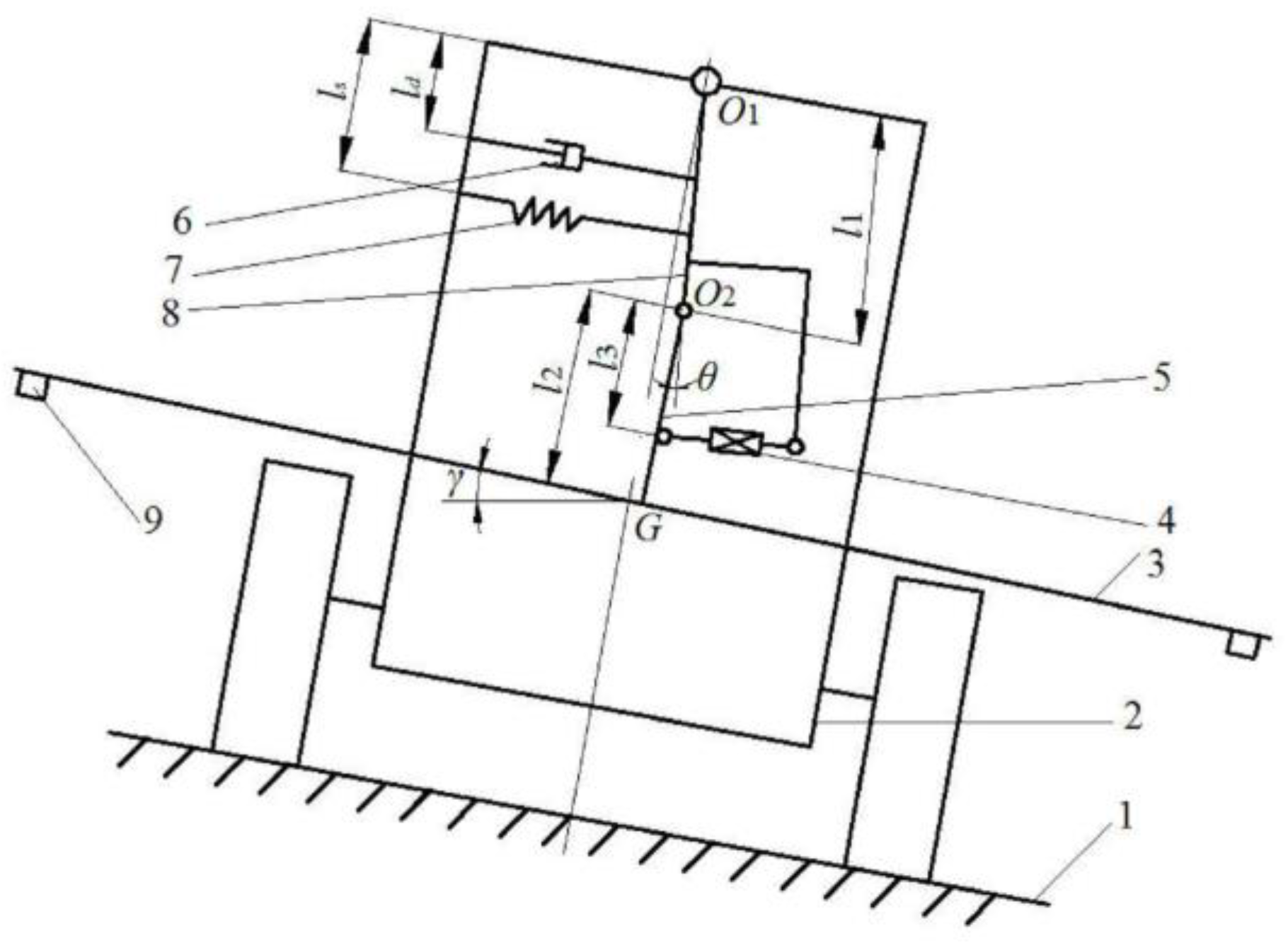
2. Modeling of the Double-Pendulum Suspension System
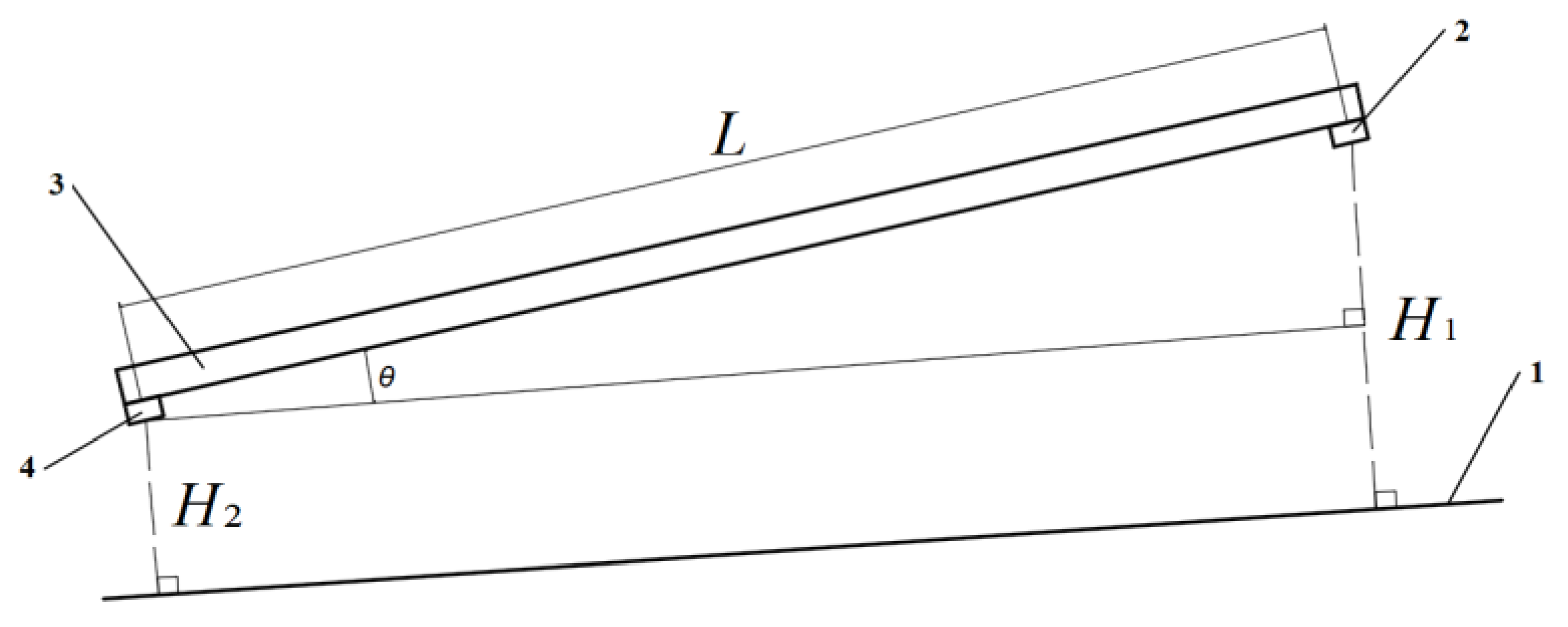
2.1. Description of the Suspension System
2.2. Transfer Function of the Active Suspension System
2.3. Transfer Function of the Electric Linear Actuator
3. Design of the Control System
3.1. Design of the Control System Hardware
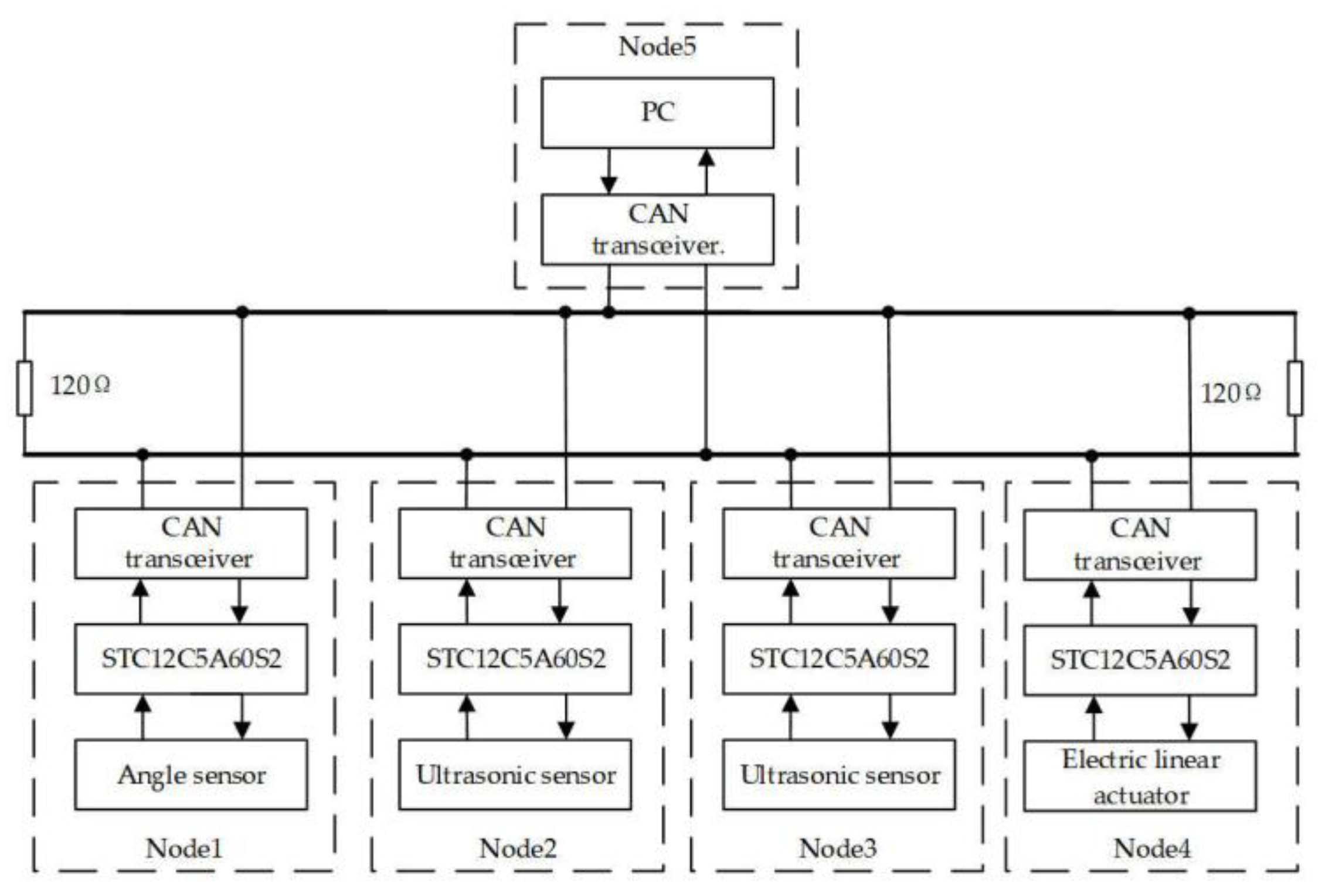
3.1.1. Overall Structure of the Control System
3.1.2. Hardware Selection
- (1)
- Main control chips of the functional nodes
- (2)
- Ranging sensor
- (3)
- Angle sensor
3.1.3. Hardware Solution for Serial Communication
3.2. Design of the Fuzzy PID Controller
3.2.1. Structure of the Fuzzy PID Controller
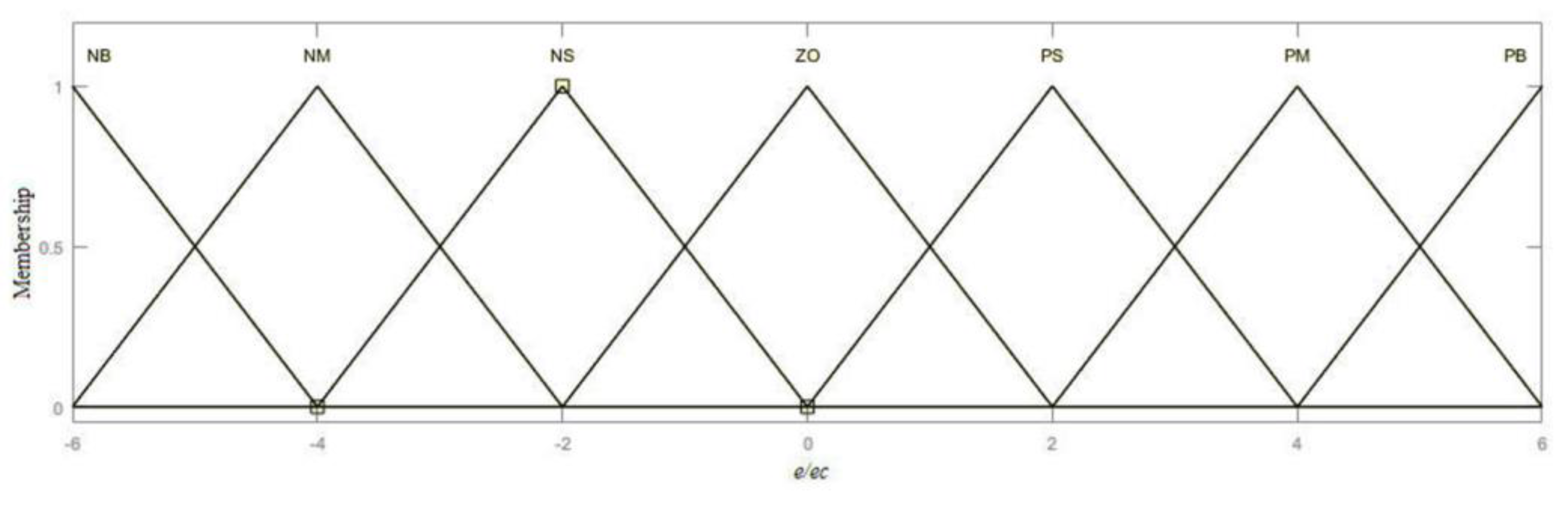
3.2.2. Fuzzification of Input and Output Variables
3.2.3. Fuzzy Rules
3.2.4. Parameter Tuning
3.3. Particle Swarm Optimization (PSO) Algorithm and Simulation
3.3.1. PSO Algorithm
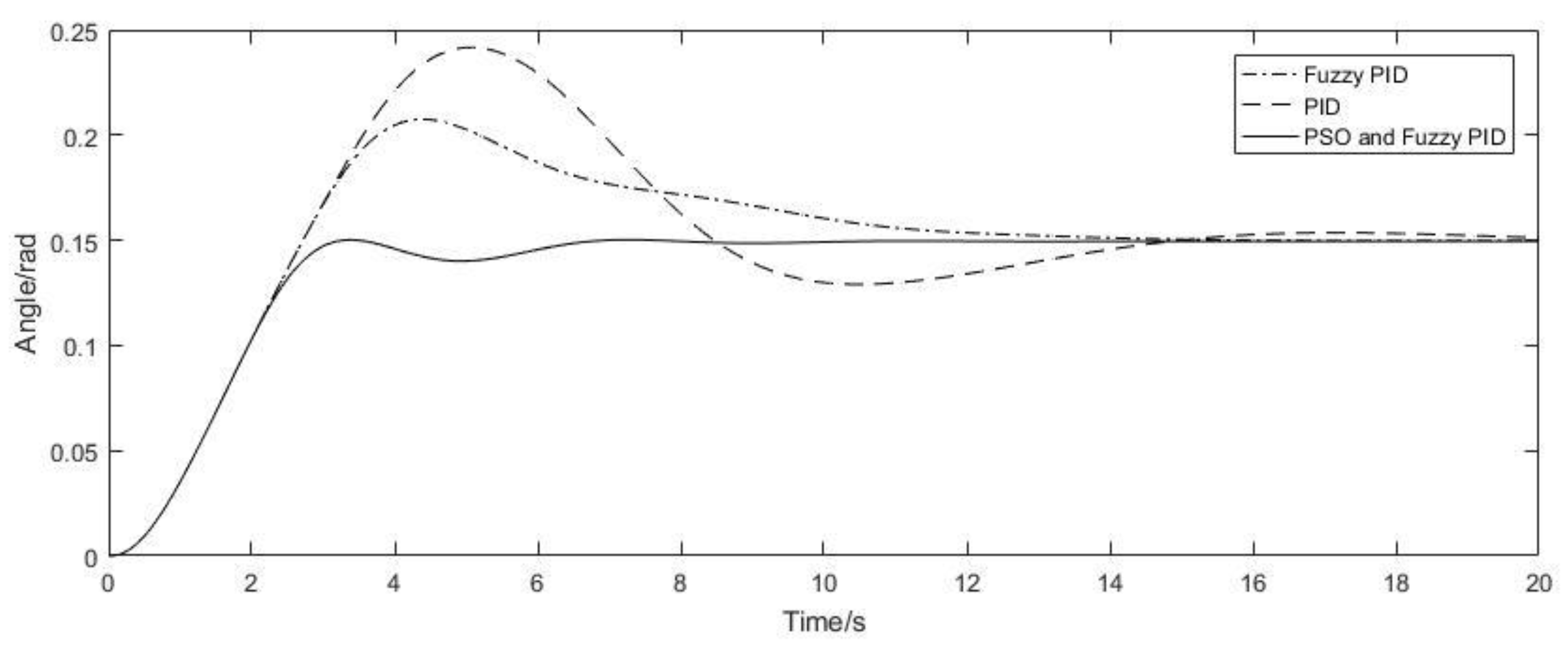
3.3.2. Simulation Analysis
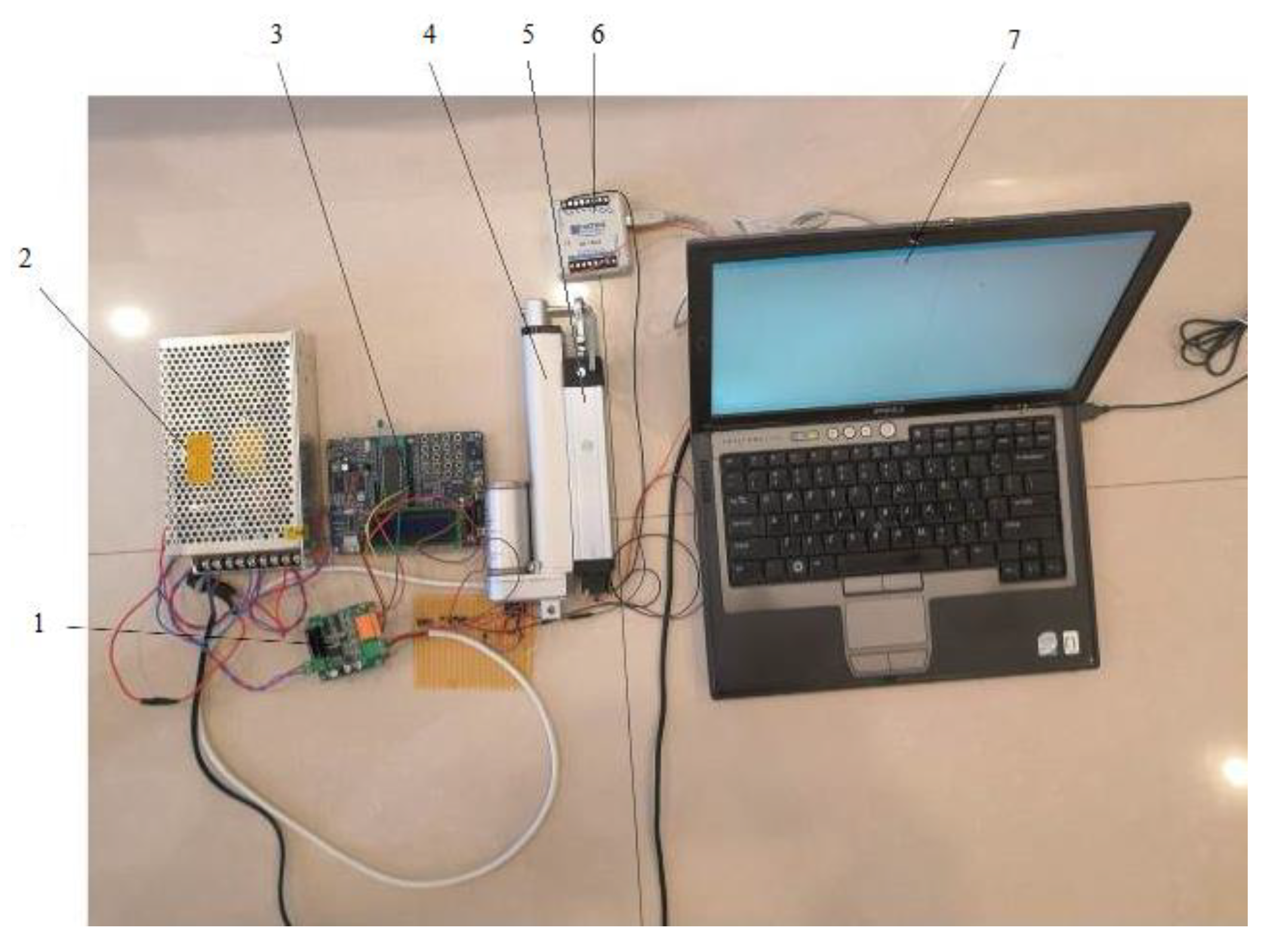
4. Experiments and Results
4.1. Experimental Device
4.2. Experimental Method
4.3. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- He, X. Research progress and developmental recommendations on precision spraying technology and equipment in China. Smart Agric. 2020, 2, 133–146. [Google Scholar]
- He, X. Research and development of efficient plant protection equipment and precision spraying technology in China: A review. J. Plant Protec. 2022, 1, 389–397. [Google Scholar]
- Qiu, B.; Yan, R.; Ma, J.; Guan, X.; Ou, M. Research progress analysis of variable rate sprayer technology. Trans. CSAM 2015, 46, 59–72. [Google Scholar]
- Jeon, H.Y.; Womac, A.R.; Gunn, J. Sprayer boom dynamic effects on application uniformity. Trans. CSAE 2004, 47, 647–658. [Google Scholar]
- Jia, W.; Zhang, L.; Yan, M.; Xue, X. Current situation and development trend of boom sprayer. J. Chin. Agric. Mech. 2013, 34, 19–22. [Google Scholar]
- Jeon, H.Y.; Womac, A.R.; Wilkerson, J.B.; Hart, W.E. Sprayer boom instrumentation for field use. Trans. ASAE 2004, 47, 659–666. [Google Scholar] [CrossRef]
- Balsari, P.; Gil, E.; Marucco, P. Field-crop-sprayer potential drift measured using test bench. Biosyst. Eng. 2017, 154, 3–13. [Google Scholar] [CrossRef]
- Ramon, H.; Baerdemaeker, J.D. Spray boom motions and spray distribution: Part l-Derivation of a mathematical relation. J. Agric. Eng. Res. 1997, 66, 23–29. [Google Scholar] [CrossRef]
- Ramon, H.; Missotten, B.; Baerdemaeker, J.D. Spray boom motions and spray distribution: Part 2-experimental validation of the mathematical relation and simulation results. J. Agric. Eng. Res. 1997, 66, 31–39. [Google Scholar] [CrossRef]
- Cui, L.; Xue, X.; Le, F.; Mao, H.; Ding, S. Design and experiment of electro hydraulic active suspension for controlling the rolling motion of spray boom. Int. J. Agric. Biol. Eng. 2019, 12, 72–81. [Google Scholar] [CrossRef]
- Deprez, K.; Anthonis, J.; Ramon, H. System for vertical boom corrections on hilly fields. J. Sound Vib. 2003, 266, 613–624. [Google Scholar] [CrossRef]
- Tahmasebi, M.; Rahman, R.A.; Mailah, M.; Gohari, M. Active force control applied to spray boom structure. Appl. Mech. Mater. J. 2013, 315, 616–620. [Google Scholar] [CrossRef]
- Deprez, K.; Anthonis, J.; Ramon, H. Development of a slow active suspension for stabilizing the roll of spray booms: Part 1—Hybrid modelling. Biosyst. Eng. 2002, 81, 185–191. [Google Scholar] [CrossRef]
- Deprez, K.; Anthonis, J.; Ramon, H. Development of a slow active suspension for stabilizing the roll of spray booms: Part 2: Controller design. Biosyst. Eng. 2002, 81, 273–279. [Google Scholar] [CrossRef]
- Anthonis, J.; Audenaert, J.; Ramon, H. Design optimization for the vertical suspension of a crop sprayer boom. Biosyst. Eng. 2005, 90, 153–160. [Google Scholar] [CrossRef]
- O’Sullivan, J.A. Simulation of the behavior of a spray boom with an active and passive pendulum suspension. J. Agric. Eng. Res. 1986, 35, 157–173. [Google Scholar] [CrossRef]
- O’Sullivan, J.A. Verification of passive and active versions of a mathematical model of a pendulum spray boom suspension. J. Agric. Eng. Res. 1988, 40, 89–101. [Google Scholar] [CrossRef]
- Frost, A.R. Simulation of an active spray boom suspension. J. Agric. Eng. Res. 1984, 30, 313–325. [Google Scholar] [CrossRef]
- Cui, L.; Xue, X.; Ding, S.; Gu, W.; Chen, C.; Le, F. Modeling and simulation of dynamic behavior of large spray boom with active and passive pendulum suspension. Trans. CSAM 2017, 48, 82–90. [Google Scholar]
- Cui, L.; Xue, X.; Ding, S.; Qiao, B.; Le, F. Analysis and test of dynamic characteristics of large spraying boom and pendulum suspension damping system. Trans. CSAE 2017, 33, 69–76. [Google Scholar]
- Xue, T.; Li, W.; Du, Y.; Mao, E.; Wen, H. Adaptive fuzzy sliding mode control of spray boom active suspension for large high clearance sprayer. Trans. CSAE 2018, 34, 47–56. [Google Scholar]
- Cui, L.; Xue, X.; Ding, S.; Le, F. Development of a DSP-based electronic control system for the active spray boom suspension. Comput. Electron. Agric. 2019, 166, 105024. [Google Scholar] [CrossRef]
- Cui, L.; Xue, X.; Le, F.; Ding, S. Adaptive robust control of active and passive pendulum suspension for large boom sprayer. Trans. CSAM 2020, 51, 130–141. [Google Scholar]
- Chen, W.; Qiu, B.; Yang, N. Spray boom position control system based on ultrasonic sensors. J. Agric. Mechan. Res. 2013, 3, 84–87. [Google Scholar]
- Wang, S.; Zhao, C.; Wang, X. Design and experiments on boom height adjusting system. J. Agric. Mechan. Res. 2014, 8, 161–164. [Google Scholar]
- Chang, C. Remote Measuring and Controlling System Design of Six-DOF Parallel Platform. Master’s Thesis, Dalian University of Technology, Dalian, China, 2015. [Google Scholar]
- Yang, J. The Research on 6-DOF Parallel Micro-Positioning Platform Control System Based on the Embedded System. Master’s Thesis, The First Academy of China Aerospace Science and Technology Corporation, Beijing, China, 2017. [Google Scholar]
- Xue, T.; Liu, Z.; Huo, J.; Wang, H.; Li, X.; Jiang, S. Design of mechanical automatic control system based on integral discrete PID algorithm. J. Xinyang Normal Univ. 2020, 33, 138–143. [Google Scholar]
- Miao, W.; Zhou, Z.; Xuan, J.; Cheng, D.; Cao, N. Design and simulation of ball balancing robot controller based on fuzzy PID. Transducer Microsyst. Technol. 2021, 40, 66–70. [Google Scholar]
- Shi, C.; Zhang, Y. Research on speed control of hydraulic drive spindle based on fuzzy adaptive PID controller. Chinese J. Constr. Mach. 2020, 18, 516–520. [Google Scholar]
- Ma, Y.; Ding, H.; Mu, H.; Chen, H. Liquid cooling strategy of power battery based on fuzzy PID algorithm. Control Theoryand Appl. 2021, 38, 549–560. [Google Scholar]
- Jeon, H.Y.; Zhu, H.; Derksen, R.; Ozkan, E.; Krause, C. Evaluation of ultrasonic sensor for variable-rate spray applications. Comput. Electron. Agric. 2011, 75, 213–221. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB/NB/PS | PM/PB/PS | ZO/NM/NM | PM/NM/NB | NB/NS/NM | NB/ZO/NB | NS/ZO/PS |
| NM | PB/NB/NS | PB/PB/NS | PM/NM/NS | PS/NS/NM | PS/NS/NM | ZO/ZO/NS | ZO/ZO/ZO |
| NS | PB/NS/ZO | PM/NB/NS | PS/NS/NM | ZO/NS/ZO | ZO/ZO/NS | NS/PS/NS | NS/PS/PS |
| ZO | PM/NM/ZO | PS/NB/NS | PS/NS/NS | ZO/ZO/ZO | ZO/ZO/ZO | PS/NS/ZO | ZO/ZO/NS |
| PS | PS/NM/ZO | PS/NS/ZO | ZO/ZO/NS | NM/ZO/ZO | NS/PS/NM | NM/PM/ZO | NB/PM/ZO |
| PM | PS/ZO/NB | PS/ZO/NS | PM/ZO/ZO | ZO/PS/ZO | NS/PM/PM | NM/PB/PS | NB/PB/PB |
| PB | ZO/ZO/PB | ZO/ZO/PM | NS/PS/ZO | NS/PS/PM | NM/PM/PS | NB/PB/PB | NB/PB/PB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Bai, X.; Su, Z.; Tang, S.; Wang, Z.; Li, F.; Yu, H. Development of a Control System for Double-Pendulum Active Spray Boom Suspension Based on PSO and Fuzzy PID. Agriculture 2023, 13, 1660. https://doi.org/10.3390/agriculture13091660
Li F, Bai X, Su Z, Tang S, Wang Z, Li F, Yu H. Development of a Control System for Double-Pendulum Active Spray Boom Suspension Based on PSO and Fuzzy PID. Agriculture. 2023; 13(9):1660. https://doi.org/10.3390/agriculture13091660
Chicago/Turabian StyleLi, Fang, Xiaohu Bai, Zhanxiang Su, Shoushan Tang, Zexu Wang, Feng Li, and Hualong Yu. 2023. "Development of a Control System for Double-Pendulum Active Spray Boom Suspension Based on PSO and Fuzzy PID" Agriculture 13, no. 9: 1660. https://doi.org/10.3390/agriculture13091660
APA StyleLi, F., Bai, X., Su, Z., Tang, S., Wang, Z., Li, F., & Yu, H. (2023). Development of a Control System for Double-Pendulum Active Spray Boom Suspension Based on PSO and Fuzzy PID. Agriculture, 13(9), 1660. https://doi.org/10.3390/agriculture13091660